Результат интеллектуальной деятельности: ИДЕНТИФИКАЦИЯ ПЛОСКОСТЕЙ РАЗРЫВА ИЗ МИКРОСЕЙСМИЧЕСКИХ ДАННЫХ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка испрашивает приоритет по предварительной заявке на патент США с порядковым номером №61/710,582, озаглавленной "Identifying Dominant Fracture Orientations" (Идентификация доминирующих ориентаций разрывов), поданной 5 октября 2012, и заявке на патент США с порядковым номером №13/896,617, озаглавленной "Identifying Fracture Planes From Microseismic Data" (Идентификация плоскостей разрыва из микросейсмических данных), поданной 17 мая 2013.
УРОВЕНЬ ТЕХНИКИ
Данное описание относится к идентификации плоскостей разрыва на основе микросейсмических данных. Микросейсмические данные часто получают в связи с операциями гидроразрыва пласта, применяемыми к подземному пласту. Операции гидроразрыва обычно применяют, чтобы образовать искусственные разрывы в подземном пласте и посредством этого повысить продуктивность подземного пласта по углеводородам. Давления, формируемые операцией гидроразрыва, могут возбуждать малоамплитудные или низкоэнергетические сейсмические события в подземном пласте, и события могут детектироваться датчиками и накапливаться для анализа.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В общем аспекте, плоскости разрыва идентифицируют на основании микросейсмических данных из подземной зоны.
В некоторых аспектах принимают данные, характеризующие местоположения микросейсмических событий, связанных с подземной зоной. Параметры плоскости разрыва вычисляют из данных местоположений микросейсмических событий. Параметры плоскости разрыва вычисляют на основании суммы взвешенных членов, и каждый из взвешенных членов включает в себя весовой множитель, который уменьшается с расстоянием между по меньшей мере одним из микросейсмических событий и плоскостью разрыва, задаваемой параметрами плоскости разрыва.
Реализации могут включать в себя один или несколько из следующих признаков. Вычисление параметров плоскости разрыва из данных местоположений множества микросейсмических событий включает в себя вычисление параметра плоскости разрыва исходя из местоположения и неопределенности, связанных с каждым из микросейсмических событий. Множество микросейсмических событий выбирают на основании объединения множества наборов микросейсмических событий, связанных с предварительно идентифицированными плоскостями разрыва. Каждый набор использовался для формирования одной из предварительно идентифицированных плоскостей разрыва.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Вычисление параметра плоскости разрыва содержит минимизацию взвешенной суммы по отношению к параметру плоскости разрыва. Каждый из членов во взвешенной сумме включает в себя весовой множитель, который не возрастает с расстоянием, и уменьшается линейно или нелинейно с расстоянием между по меньшей мере одним из микросейсмических событий и плоскостью разрыва, задаваемой параметром плоскости разрыва.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Вычисление параметра плоскости разрыва включает в себя вычисление по меньшей мере одного параметра из параметров a, b, c или d плоскости разрыва для плоскости разрыва, задаваемой уравнением 0=ax+by+cz+d. Здесь x, y и z представляют собой координаты трехмерного прямолинейного пространства. Вычисление параметра плоскости разрыва включает в себя выбор начальных значений для параметров a, b, c и d плоскости разрыва. Вычисление параметра плоскости разрыва включает в себя построение множителей коэффициентов и системы уравнений  и алгебраического уравнения, которое связывает параметры, причем S представляет собой взвешенную сумму. Вычисление параметра плоскости разрыва включает в себя использование возможных начальных значений для решения системы уравнений Например, начальные значения вычисляют на основании вектора нормали, задаваемого тремя событиями из микросейсмических событий, на основании среднего нескольких векторов нормали, заданных несколькими тройками микросейсмических событий, или на основании любых других соответствующих способов. Например, вычисление начальных значений включает в себя формирование двумерной истинной гистограммы (например, в значениях углов направления простирания и наклона); выборку вершины гистограммы, которая является ближайшей к текущей ориентации плоскости разрыва; и идентификацию начальных значений на основании соответствующей ориентации вершины.
и алгебраического уравнения, которое связывает параметры, причем S представляет собой взвешенную сумму. Вычисление параметра плоскости разрыва включает в себя использование возможных начальных значений для решения системы уравнений Например, начальные значения вычисляют на основании вектора нормали, задаваемого тремя событиями из микросейсмических событий, на основании среднего нескольких векторов нормали, заданных несколькими тройками микросейсмических событий, или на основании любых других соответствующих способов. Например, вычисление начальных значений включает в себя формирование двумерной истинной гистограммы (например, в значениях углов направления простирания и наклона); выборку вершины гистограммы, которая является ближайшей к текущей ориентации плоскости разрыва; и идентификацию начальных значений на основании соответствующей ориентации вершины.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Взвешенная сумма представляется в виде S= . Здесь N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го члена взвешенной суммы, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и
. Здесь N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го члена взвешенной суммы, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и  является неотрицательной функцией расстояния hi. Например, функция представляется в виде
является неотрицательной функцией расстояния hi. Например, функция представляется в виде  и расстояние, представленное в виде
и расстояние, представленное в виде  , является наименьшей квадратичной функцией расстояний нормали. Здесь xi представляет собой x координату для i-го микросейсмического события, yi представляет собой y координату для i-го микросейсмического события, zi представляет собой z координату для i-го микросейсмического события, и a, b, c и d являются параметрами плоскости разрыва. Весовой множитель для i-го члена взвешенной суммы может быть представлен в виде
, является наименьшей квадратичной функцией расстояний нормали. Здесь xi представляет собой x координату для i-го микросейсмического события, yi представляет собой y координату для i-го микросейсмического события, zi представляет собой z координату для i-го микросейсмического события, и a, b, c и d являются параметрами плоскости разрыва. Весовой множитель для i-го члена взвешенной суммы может быть представлен в виде  , где αi является неотрицательным значением, меньшим единицы. Весовой множитель для i-го члена взвешенной суммы может быть представлен функцией
, где αi является неотрицательным значением, меньшим единицы. Весовой множитель для i-го члена взвешенной суммы может быть представлен функцией  . Весовой множитель для i-го члена взвешенной суммы может быть представлен «магической» (witch) функцией
. Весовой множитель для i-го члена взвешенной суммы может быть представлен «магической» (witch) функцией  , где каждый член включает в себя постоянные величины αi и βi, которые возможно регулировать или оптимизировать в некоторых случаях.
, где каждый член включает в себя постоянные величины αi и βi, которые возможно регулировать или оптимизировать в некоторых случаях.
Дополнительно или альтернативно, эти и другие реализации могут включать в себя один или несколько из следующих признаков. Взвешенная сумма  , причем N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го члена взвешенной суммы, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и |hi| представляет собой абсолютное значение (модуль) расстояния i-го микросейсмического события от плоскости разрыва. Решение по минимизации достигают с использованием несобственных частных производных.
, причем N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го члена взвешенной суммы, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и |hi| представляет собой абсолютное значение (модуль) расстояния i-го микросейсмического события от плоскости разрыва. Решение по минимизации достигают с использованием несобственных частных производных.
Подробности одной или нескольких реализаций изложены на сопроводительных чертежах и описании ниже. Другие признаки, объекты и преимущества будут очевидными из описания и чертежей и из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A - схема примерной системы скважин;
Фиг. 1B - схема примерной вычислительной подсистемы 110 для Фиг. 1A.
Фиг. 2A и 2B - диаграммы, показывающие примерную плоскость разрыва, идентифицированную из микросейсмических данных.
Фиг. 3A и 3B диаграммы, показывающие примерную ориентацию плоскости разрыва.
Фиг. 4 - блок-схема примерного способа для идентификации плоскости разрыва из микросейсмических данных.
Одинаковые ссылочные знаки на различных чертежах обозначают одинаковые элементы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В некоторых аспектах описанного в документе, плоскости разрыва идентифицируют из микросейсмических событий, связанных с подземной зоной. В некоторых случаях плоскости разрыва могут быть идентифицированы в реальном времени в ходе мониторинга микросейсмических данных, и плоскости разрыва могут визуально отображаться, чтобы показывать эволюцию во времени, включая распространение и развитие плоскостей разрыва. Такие функциональные возможности могут встраиваться в системы управления, программное обеспечение, аппаратные средства или другие типы средств, доступных специалистам по эксплуатации месторождений нефти и газа, когда они активизируют гидроразрывы или выполняют какого-либо типа анализ в реальном времени. В некоторых случаях плоскости разрыва могут идентифицироваться после операции гидроразрыва, и данные плоскости разрыва могут использоваться, например, чтобы планировать или анализировать добычу (из скважины) или другие активности, связанные с подземной зоной.
Операции гидроразрыва могут применяться в любой подходящей подземной зоне. Операции гидроразрыва часто применяются в плотных устойчивых породах с малопроницаемыми коллекторами, которые могут включать в себя, например, малопроницаемые обычные природные коллекторы нефти и газа, непрерывные бассейновые залежи ресурсов и коллекторы сланцевого газа, или другие типы пластов. Гидроразрыв может образовывать искусственные разрывы в подземной среде, каковое может повысить продуктивность коллектора по углеводородам.
В течение применения операции гидроразрыва пласта закачивание текучих сред высокого давления может изменять напряжения, аккумулировать напряжения сдвига и вызывать другие эффекты внутри геологических глубинных структур. В некоторых случаях микросейсмические события являются связанными с гидроразрывами, наведенными активностями по разрыву пласта. Акустическая энергия или звуковые сигналы, связанные с напряжением в горных породах, деформациями и разрывом пласта, могут детектироваться и накапливаться посредством датчиков. В некоторых случаях микросейсмические события имеют низкую энергию (например, со значением регистрации интенсивности или моментной магнитуды меньшим, чем три), и некоторая неопределенность или точность, или погрешность измерений связывается с местоположениями событий. Неопределенность можно описать, например, вытянутым сфероидом, где наивысшая вероятность находится в центре сфероида, и низшая вероятность - на краю.
Построение карт (моделирование) микросейсмических событий может использоваться, чтобы геометрически определить местоположение источника (пункта) возбуждения микросейсмических событий на основании детектированных продольных и поперечных волн. Детектированные продольные и поперечные волны (например, p-волны (продольные) и s-волны (поперечные)) могут выдавать дополнительную информацию о микросейсмических событиях, включая местоположение источника возбуждения, местоположение события и неопределенность измерения позиции, время наступления события, моментную магнитуду события, направление движения частицы и энергетический спектр излучения, и возможно прочие. Может осуществляться мониторинг микросейсмических событий в реальном времени, и в некоторых случаях события также обрабатываются в реальном времени в течение операции гидроразрыва. В некоторых случаях после операции гидроразрыва микросейсмические события, накопленные в операции, обрабатываются вместе как "послеоперационные данные".
Обработка данных микросейсмического события, накопленных в операции гидроразрыва, может включать в себя установление соответствия разрыва (также называемое построением карты разрыва). Процессы установления соответствия разрыва могут идентифицировать плоскости разрыва в любой зоне на основании микросейсмических событий, накопленных из зоны. Некоторые примерные вычислительные алгоритмы для установления соответствия разрыва используют данные микросейсмического события (например, местоположение события, неопределенность измерения местоположения события, моментную магнитуду события и т.д.), чтобы идентифицировать отдельные разрывы, которые соответствуют накопленному набору микросейсмических событий. Некоторые примерные вычислительные алгоритмы могут вычислять статистические свойства структур разрывов. Статистические характеристики могут включать в себя, например, ориентацию разрыва, тренды ориентации разрыва, размер разрыва (например, длину, высоту, площадь и т.д.), плотность расположения разрывов, сложности разрыва, характеристики сетки разрывов и т.д. Некоторые вычислительные алгоритмы учитывают неопределенность в определении местоположения события путем использования множества реализаций определения местоположения микросейсмического события. Например, альтернативные статистические реализации, связанные со способами Монте Карло, могут использоваться для заданного распределения вероятностей на сфероидном или другом типе распределения.
Обычно, алгоритмы установления соответствия разрывов могут оперировать данными реального времени, послеоперационными данными, данными после гидроразрыва, или любой подходящей комбинацией этих и других типов данных. Некоторые вычислительные алгоритмы для установления соответствия разрывов оперируют только послеоперационными данными. Алгоритмы, оперирующие послеоперационными данными, могут использоваться, когда любое подмножество или несколько подмножеств микросейсмических данных, подлежащих обработке, были накоплены из операции гидроразрыва; такие алгоритмы могут осуществлять доступ (например, в виде начального ввода) к полному подмножеству микросейсмических событий, подлежащих обработке. В некоторых реализациях алгоритмы установления соответствия разрывов могут оперировать данными реального времени. Такие алгоритмы могут использоваться для автоматического установления соответствия разрывов в реальном времени в течение операции гидроразрыва. Алгоритмы, оперирующие данными реального времени, могут использоваться в течение операции гидроразрыва, и такие алгоритмы могут приспосабливать или динамически обновлять модель предварительно идентифицированного разрыва, чтобы отразить вновь полученные микросейсмические события. Например, как только микросейсмическое событие детектировано и получено из поля обработки, алгоритм автоматического установления соответствия разрывов в реальном времени может реагировать на это новое событие путем динамической идентификации и извлечения плоскостей разрыва из уже накопленных микросейсмических событий в режиме реального времени. Некоторые вычислительные алгоритмы для установления соответствия разрывов могут оперировать комбинацией послеоперационных данных и данных реального времени.
В некоторых случаях, алгоритмы построения карт разрывов сконфигурированы с возможностью обрабатывать условия, которые возникают в ходе обработки микросейсмических данных реального времени. Например, несколько типов требований или условий могут происходить по большей части преимущественно в контексте реального времени. В некоторых случаях способы обработки (данных) в реальном времени могут быть приспособлены для учета (либо снижения, либо избегания) сниженной точности, которая иногда связана с разрывами, извлекаемыми из наборов данных, не имеющих достаточного количества микросейсмических событий или не имеющих достаточного количества микросейсмических событий в некоторых частях представления (области). Некоторые способы обработки в реальном времени могут быть приспособлены, чтобы выдавать данные разрыва, которые являются совместимыми с данными разрыва, получаемыми из способов обработки послеоперационных данных. Например, некоторые из примерных способов обработки в реальном времени, описанных в документе, выдали результаты, являющиеся статистически одинаковыми, согласно критерию для проверки статистической гипотезы (t-критерий и F-критерий), в качестве результатов, выдаваемых способами обработки послеоперационных данных на тех же данных.
В некоторых случаях, способы обработки данных реального времени могут быть приспособлены для легкого (например, мгновенного, с точки зрения пользователя) предложения пользователям данных идентифицированного разрыва. Такие функции могут позволять специалистам по эксплуатации или операторам динамически получать геометрические данные разрыва и корректировать параметры операции гидроразрыва, когда целесообразно (например, для повышения, улучшения, оптимизации или иного изменения технологической обработки). В некоторых случаях плоскости разрыва динамически извлекаются из микросейсмических данных и визуально отображаются специалистам по эксплуатации в реальном времени. Способы обработки данных в реальном времени могут показывать высокое быстродействие. В некоторых случаях, рабочая характеристика может быть улучшена с помощью технологии параллельных вычислений, технологии распределенных вычислений, подходов с организацией параллельных потоков, алгоритмов быстрого двоичного поиска, или комбинации этих и других аппаратных и программных решений, которые содействуют операциям реального времени.
В некоторых реализациях технология установления соответствия разрывов может непосредственно представлять собой информацию о плоскостях разрыва, связанных с трехмерными микросейсмическими событиями. Представляемые плоскости разрыва могут представлять собой сетки разрывов, которые показывают множественные ориентации и активизируют сложные картины развития разрыва. В некоторых случаях параметры гидроразрыва извлекают из облака данных микросейсмических событий; такие параметры могут включать в себя, например, тренды ориентации разрыва, плотность расположения разрывов и сложность разрывов. Информация параметра разрыва может представляться специалистам по эксплуатации или операторам, например, в табличном, числовом или графическом интерфейсе, или интерфейсе, объединяющем табличные, числовые и графические элементы. Графический интерфейс может представляться в реальном времени и может показывать динамику реального времени для гидроразрывов. В некоторых случаях это может помочь специалистам по эксплуатации в анализе сложности разрыва, сетки разрывов и геометрии коллектора, или это может помочь им лучше понимать процесс гидроразрыва в то время, когда он продвигается.
В некоторых случаях установление соответствия разрывов выполняется на основе алгоритма взвешенных наименьших квадратов расстояния. Например, плоскость разрыва может вычисляться на основании взвешенной суммы  . Здесь N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го микросейсмического события, и hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва. Может использоваться весовой множитель, который уменьшается (например, линейно, или нелинейно) с уменьшением расстояния hi, или может использоваться другой весовой множитель. Плоскость разрыва может быть идентифицирована минимизацией по отношению к параметрам плоскости разрыва. В некоторых случаях впоследствии S является нелинейной функцией параметров плоскости. Может не иметься ни одного, иметься единственное или множество решений для параметров плоскости, которые минимизируют S. В некоторых случаях, можно показать, что всегда существует, по меньшей мере, одно решение, и в большинстве случаев - множество решений. В некоторых случаях, некоторые из этих решений могут представлять собой локальный минимум для S. Одно или несколько решений могут представлять собой глобальный минимум S. Для решения вышеупомянутой задачи оптимизации может потребоваться итерационный алгоритм. Различные начальные условия для итерационного алгоритма могут приводить к различным решениям, и только небольшой набор начальных условий может приводить к глобальному минимуму S. Несколько способов могут использоваться для нахождения хороших начальных условий, которые приводят к подходящему или релевантному решению для параметров плоскости. Например, один подход основан на естественной (частичных преобразований Хафа (Hough)) гистограмме для параметров плоскостей и использовании наиболее целесообразных ориентаций в качестве начальных условий. Другой подход включает в себя рассмотрение набора данных микросейсмических событий в виде «облака» в трехмерном пространстве и определение трех главных осей набора данных в пространстве (например, путем вычисления 6 элементов для симметричного момента тензора инерции и нахождения его собственных значений и собственных векторов). Плоскость, являющаяся нормальной к вектору, соответствующему наименьшему собственному значению, может рассматриваться хорошим начальным условием. Дополнительные или другие способы могут использоваться для идентификации хорошего начального условия.
. Здесь N представляет собой число точек микросейсмических данных, wi представляет собой весовой множитель для i-го микросейсмического события, и hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва. Может использоваться весовой множитель, который уменьшается (например, линейно, или нелинейно) с уменьшением расстояния hi, или может использоваться другой весовой множитель. Плоскость разрыва может быть идентифицирована минимизацией по отношению к параметрам плоскости разрыва. В некоторых случаях впоследствии S является нелинейной функцией параметров плоскости. Может не иметься ни одного, иметься единственное или множество решений для параметров плоскости, которые минимизируют S. В некоторых случаях, можно показать, что всегда существует, по меньшей мере, одно решение, и в большинстве случаев - множество решений. В некоторых случаях, некоторые из этих решений могут представлять собой локальный минимум для S. Одно или несколько решений могут представлять собой глобальный минимум S. Для решения вышеупомянутой задачи оптимизации может потребоваться итерационный алгоритм. Различные начальные условия для итерационного алгоритма могут приводить к различным решениям, и только небольшой набор начальных условий может приводить к глобальному минимуму S. Несколько способов могут использоваться для нахождения хороших начальных условий, которые приводят к подходящему или релевантному решению для параметров плоскости. Например, один подход основан на естественной (частичных преобразований Хафа (Hough)) гистограмме для параметров плоскостей и использовании наиболее целесообразных ориентаций в качестве начальных условий. Другой подход включает в себя рассмотрение набора данных микросейсмических событий в виде «облака» в трехмерном пространстве и определение трех главных осей набора данных в пространстве (например, путем вычисления 6 элементов для симметричного момента тензора инерции и нахождения его собственных значений и собственных векторов). Плоскость, являющаяся нормальной к вектору, соответствующему наименьшему собственному значению, может рассматриваться хорошим начальным условием. Дополнительные или другие способы могут использоваться для идентификации хорошего начального условия.
В некоторых реализациях алгоритм взвешенных наименьших квадратов расстояния может создавать плоскость разрыва для любого набора начальных условий. Например, в некоторых случаях начальные параметры плоскости разрыва могут быть вычислены исходя из любого неколлинеарного триплета в наборе микросейсмических данных, и алгоритм взвешенных наименьших квадратов расстояния будет выдавать действительную плоскость разрыва независимо от используемого триплета. Во многих случаях параметры плоскости разрыва, выдаваемые на основании алгоритма наименьших квадратов расстояния, могут быть близкими к оптимальным. В некоторых реализациях алгоритм взвешенных наименьших квадратов расстояния не ограничивается размером набора микросейсмических данных. Например, в некоторых случаях, сложность алгоритма не зависит от числа обрабатываемых микросейсмических событий.
Хотя данная заявка описывает примеры, касающиеся данных микросейсмического события, способы и системы, описанные в этой заявке, могут применяться к другим типам данных. Например, способы и системы, описанные в документе, могут использоваться для обработки наборов данных, которые включают в себя элементы данных, не связанные с микросейсмическими событиями, которые могут включать в себя другие типы физических данных, связанных с подземной зоной. В некоторых аспектах данная заявка обеспечивает инфраструктуру для обработки больших объемов данных, и инфраструктура может быть приспособлена к различным применениям, которые конкретно не описаны в документе. Например, способы и системы, описанные в документе, могут использоваться для анализа пространственных координат, данных ориентации или других типов информации, накопленной от любого источника. В качестве примера, образцы грунта или горных пород могут отбираться (например, в течение бурения), и концентрация данной смеси (например, некоторое "соляное тело") может идентифицироваться в виде функции местоположения. Это может помогать геофизикам и операторам в оценивании гео-слоев в грунте.
Фиг. 1A показывает принципиальную схему примерной системы 100 скважин с вычислительной подсистемой 110. Система 100 скважин включает в себя рабочую скважину 102 и наблюдательную скважину 104. Наблюдательная скважина 104 может быть расположена удаленно от рабочей скважины 102, вблизи рабочей скважины 102 или в любом подходящем месте. Система 100 скважин может включать в себя одну или несколько дополнительных рабочих скважин, наблюдательных скважин, или другие типы скважин. Вычислительная подсистема 110 может включать в себя одно или несколько вычислительных устройств или систем, расположенных рабочей скважине 102, в наблюдательной скважине 104 или в других местоположениях. Вычислительная подсистема 110 или любой из ее компонентов могут размещаться на расстоянии от других компонентов, показанных на Фиг. 1A. Например, вычислительная подсистема 110 может быть расположена в центре обработки данных, вычислительном комплексе или другом подходящем месте. Система 100 скважин может включать в себя дополнительные или другие функциональные возможности, и функциональные возможности системы скважин могут быть организованы, как показано на Фиг. 1A, или в любой другой подходящей конфигурации.
Примерная рабочая скважина 102 включает в себя ствол 101 скважины в подземной зоне 121 ниже поверхности 106. Подземная зона 121 может включать в себя один или менее одного пласта горной породы, или подземная зона 121 может включать в себя более одного пласта горной породы. В примере, показанном на Фиг. 1A, подземная зона 121 включает в себя различные глубинные слои 122. Глубинные слои 122 могут задаваться геологическими или другими характеристиками подземной зоны 121. Например, каждый из глубинных слоев 122 может соответствовать конкретной литологии, конкретному фазовому составу, конкретному профилю напряжения или давления, или любой другой подходящей характеристике. В некоторых случаях, один или большее число глубинных слоев 122 могут быть коллектором текучей среды, который содержит углеводороды или другие типы текучей среды. Подземная зона 121 может включать в себя любой подходящий пласт горной породы. Например, один или большее число глубинных слоев 122 могут включать в себя песчаник, карбонатные материалы, сланец, уголь, глинистую породу, гранит или другие материалы.
Примерная рабочая скважина 102 включает в себя подсистему 120 обработки нагнетанием, которая включает в себя автомобили 116 с приборами, автомобильные насосные установки 114 и другое оборудование. Подсистема 120 обработки нагнетанием может применять обработку нагнетанием к подземной зоне 121 через ствол 101 скважины. Обработка нагнетанием может быть операцией гидроразрыва, осуществляющей разрыв подземной зоны 121. Например, обработка нагнетанием может инициировать, распространять или раскрывать разрывы в одном или нескольких подземных слоях 122. Операция гидроразрыва может включать в себя операцию диагностического (калибровочного) мини-гидроразрыва (mini-frac), операцию регулярного или полного гидроразрыва, операцию гидроразрыва в процессе эксплуатации, операцию повторного гидроразрыва, операцию конечного гидроразрыва или другой тип операции гидроразрыва.
Операция гидроразрыва может нагнетать текучую среду для обработки в подземную зону 121 с любыми подходящими значениями давления текучей среды и скорости текучей среды. Текучие среды можно закачивать с давлением, которое выше, равно или ниже давления образования разрыва, выше, равно или ниже давления закрытия разрыва, или в любой подходящей комбинации этих и других значений давления текучей среды. Давление образования разрыва для пласта является минимальным давлением закачивания текучей среды, которое может инициировать или распространять искусственно образованные разрывы в пласте. Применение операции гидроразрыва может или не может инициировать или распространять искусственно образованные разрывы в пласте. Давление закрытия разрыва для пласта является минимальным давлением закачивания текучей среды, которое может расширять существующие разрывы в подземном пласте. Применение операции гидроразрыва может или не может расширять природные или искусственные разрывы в пласте.
Операция гидроразрыва может применяться любой подходящей системой с использованием любого пригодного способа. Автомобильные насосные установки 114 могут включать в себя подвижные транспортные средства, неподвижные установки, опорные рамы, гибкие трубопроводы, трубы, емкости или резервуары для текучей среды, насосы, клапаны или другие подходящие конструкции и оборудование. В некоторых случаях автомобильные насосные установки 114 соединяют со спусковой колонной, расположенной в стволе 101 скважины. В течение работы автомобильные насосные установки 114 могут закачивать текучую среду через спусковую колонну и в подземную зону 121. Закачиваемая текучая среда может включать в себя жидкость разрыва, расклинивающие наполнители (проппанты), продавочную жидкость, добавки или другие материалы.
Операция гидроразрыва может применяться в одиночном местоположении нагнетания текучей среды или в множестве местоположений нагнетания текучей среды в подземной зоне, и текучая среда может нагнетаться за один интервал времени или за множество различных интервалов времени. В некоторых случаях операция гидроразрыва может использовать множественные различные местоположения нагнетания текучей среды в одиночной скважине, множественные местоположения нагнетания текучей среды в множестве одиночной скважине или любую подходящую комбинацию. Кроме того, операция гидроразрыва может нагнетать текучую среду через любой подходящий тип ствола скважины, такой как, например, вертикальные стволы скважин, наклонные стволы скважин, горизонтальные стволы скважин, искривленные стволы скважин, или любую подходящую комбинацию этих и других.
Операцией гидроразрыва может управлять любая подходящая система с использованием любого пригодного способа. Автомобили 116 с приборами могут включать в себя подвижные транспортные средства, неподвижные установки или другие подходящие конструкции. Автомобили 116 с приборами могут включать в себя систему управления закачиванием, которая осуществляет мониторинг и управление операцией гидроразрыва, применяемой подсистемой 120 обработки нагнетанием. В некоторых реализациях система управления закачиванием может осуществлять связь с другим оборудованием для мониторинга и управления обработкой нагнетанием. Например, автомобили 116 с приборами могут осуществлять связь с автомобильной насосной установкой 114, глубинными инструментами и оборудованием для мониторинга.
Операция гидроразрыва, а также другие активности и природные явления, могут генерировать микросейсмические события в подземной зоне 121, и микросейсмические данные могут собираться из подземной зоны 121. Например, микросейсмические данные могут собираться посредством одного или нескольких датчиков 112, связанных с наблюдательной скважиной 104, или микросейсмические данные могут собираться посредством систем других типов. Микросейсмическая информация, детектированная в системе 100 скважин, может включать в себя акустические сигналы, генерируемые природными явлениями, акустические сигналы, связанные с операцией гидроразрыва, примененной через рабочую скважину 102, или другие типы сигналов. Например, датчики 112 могут детектировать акустические сигналы, генерируемые (скользящими) сдвигами горной породы, перемещениями горной породы, разрывами горной породы или другими событиями в подземной зоне 121. В некоторых случаях местоположения отдельных микросейсмических событий могут быть определены на основании микросейсмических данных.
Микросейсмические события в подземной зоне 121 могут происходить, например, вдоль или вблизи образованных гидроразрывом разрывов. Микросейсмические события могут быть связаны с ранее существовавшими природными разрывами или плоскостями разрыва от гидроразрыва, образованными активностями по разрыву пласта. В некоторых средах большинство обнаруживаемых микросейсмических событий связано с растрескиванием горных пород из-за сдвига-скольжения. Такие события могут или не могут соответствовать образованным растяжением при гидроразрыве разрывам, которые имеют генерацию значительной ширины. На ориентацию разрыва может оказывать влияние режим напряжений, присутствие систем разрывов, которые были сформированы в разное время в прошлом (например, в условиях такой же или отличающейся ориентации напряжения). В некоторых средах более старые разрывы могут быть зацементированными до закрытых по прошествии геологического времени, и оставаться плоскостями наименьшего сопротивления в горных породах в подземной части.
Наблюдательная скважина 104, показанная на Фиг. 1A, включает в себя ствол 111 скважины в подземной зоне ниже поверхности 106. Наблюдательная скважина 104 включает в себя датчики 112 и другое оборудование, которое может использоваться для детектирования микросейсмической информации. Датчики 112 могут включать в себя сейсмоприемники (геофоны) или другие типы аппаратуры прослушивания. Датчики 112 могут размещаться в множестве позиций в системе 100 скважин. На Фиг. 1A датчики 112 установлены на поверхности 106 и ниже поверхности 106 в стволе 111 скважины. Дополнительно или альтернативно датчики могут размещаться в других местоположениях выше или ниже поверхности 106, в других местоположениях внутри ствола 111 скважины или внутри ствола другой скважины. Наблюдательная скважина 104 может включать в себя дополнительное оборудование (например, спусковую колонну, пакеры, обсадные трубы или другое оборудование), не показанное на Фиг. 1A. В некоторых реализациях микросейсмические данные детектируются посредством датчиков, установленных в рабочей скважине 102 или на поверхности 106, без использования наблюдательной скважины.
В некоторых случаях, вся или часть вычислительной подсистемы 110 может содержаться в техническом центре управления на участке скважины, в центре операций реального времени в удаленном местоположении, в другом надлежащем местоположении, или любой подходящей комбинации таковых. Система 100 скважин и вычислительная подсистема 110 могут включать в себя любую подходящую инфраструктуру связи или осуществлять доступ к ней. Например, система 100 скважин может включать в себя множество отдельных линий связи или сеть соединенных линий связи. Линии связи могут включать в себя проводные или беспроводные системы связи. Например, датчики 112 могут осуществлять связь с автомобилями 116 с приборами или вычислительной подсистемой 110 через проводные или беспроводные линии связи или сети, или автомобили 116 с приборами могут осуществлять связь с вычислительной подсистемой 110 через проводные или беспроводные линии связи или сети. Линии связи могут включать в себя общедоступную сеть передачи данных, частную сеть передачи данных, спутниковые линии связи, специализированные линии связи, телекоммуникационные линии связи или любую подходящую комбинацию этих и других линий связи.
Вычислительная подсистема 110 может анализировать микросейсмические данные, накопленные в системе 100 скважин. Например, вычислительная подсистема 110 может анализировать данные микросейсмического события из операции гидроразрыва подземной зоны 121. Микросейсмические данные из операции гидроразрыва могут включать в себя данные, накопленные до, в течение или после закачки текучей среды. Вычислительная подсистема 110 может принимать микросейсмические данные в любое подходящее время. В некоторых случаях вычислительная подсистема 110 принимает микросейсмические данные в реальном времени (или по существу в реальном времени) в течение операции гидроразрыва. Например, микросейсмические данные могут посылаться на вычислительную подсистему 110 непосредственно после детектирования датчиками 112. В некоторых случаях вычислительная подсистема 110 принимает некоторые или все микросейсмические данные после завершения операции гидроразрыва. Вычислительная подсистема 110 может принимать микросейсмические данные в любом подходящем формате. Например, вычислительная подсистема 110 может принимать микросейсмические данные в формате, выдаваемом микросейсмическими датчиками или детекторами, или вычислительная подсистема 110 может принимать микросейсмические данные после того, как микросейсмические данные были отформатированы, объединены в пакет или иным образом обработаны. Вычислительная подсистема 110 может принимать микросейсмические данные с помощью любых подходящих средств. Например, вычислительная подсистема 110 может принимать микросейсмические данные по проводной или беспроводной линии связи, проводной или беспроводной сети, или с помощью одного или нескольких дисковых ЗУ или других материальных носителей.
Вычислительная подсистема 110 может использоваться для идентификации плоскости разрыва из местоположений микросейсмических событий. Например, плоскость разрыва может быть идентифицирована путем вычисления параметров плоскости разрыва из данных местоположений микросейсмических событий. В некоторых случаях параметры плоскости разрыва вычисляют подбором (установлением соответствия) плоскости к местоположениям микросейсмических событий. Например, подбор может быть сформирован путем уменьшения или минимизации одной или нескольких функций стоимости. В некоторых случаях параметры плоскости разрыва вычисляют путем решения системы уравнений. Система уравнений может формироваться на основании взвешенной суммы, где каждый член взвешенной суммы включает в себя весовой множитель. Весовой множитель может уменьшаться (например, линейно или нелинейно) с расстоянием между одним из микросейсмических событий и плоскостью разрыва. Система уравнений может быть сформирована заданием частных производных взвешенной суммы по каждому из параметров плоскости разрыва равными нулю. Этот процесс может позволять локальному экстремуму (минимуму или максимуму) представлять допустимое решение. Систему уравнений можно решить, например, способом итераций или способами других типов. Например, уравнения могут быть решены путем обозначения

 и
и
 ,
,
и построения трех уравнений вида:
 .
.
Для трех (R,T)-пар: (x, a), (y, b), (z, c) значение d может быть фиксированным в подходящее значение.
Некоторые из способов и операций, описанных в документе, могут быть реализованы посредством вычислительной подсистемы, сконфигурированной с возможностью предоставления описанной функциональности. В различных вариантах осуществления вычислительное устройство может включать в себя любое из различных типов устройств, включая, но без ограничения указанным, системы персональных компьютеров, настольные компьютеры, переносные компьютеры, ноутбуки, системы с универсальными компьютерами, карманные компьютеры, рабочие станции, планшетные компьютеры, серверы приложений, запоминающие устройства или любой тип вычислительного или электронного устройства.
Фиг. 1B является схемой примерной вычислительной подсистемы 110 для Фиг. 1A. Примерная вычислительная подсистема 110 может быть расположена в или вблизи одной или нескольких скважин в системе 100 скважин или в удаленном местоположении. Вся или часть вычислительной подсистемы 110 может работать независимо от системы 100 скважин или независимо от любого из других компонентов, показанных на Фиг. 1A. Примерная вычислительная подсистема 110 включает в себя процессор 160, память 150 и контроллеры 170 ввода/вывода, с возможностью обмена информацией связанные шиной 165. Память может включать в себя, например, оперативное запоминающее устройство (RAM), запоминающее устройство (например, постоянное запоминающее устройство с перезаписью (ROM) или другие), накопитель на жестком диске или другой тип носителя данных. Вычислительная подсистема 110 может быть предварительно запрограммированной, или она может программироваться (и повторно программироваться) путем загрузки программы из другого источника (например, с CD-ROM, с другого компьютерного устройства через сеть передачи данных, или другим образом). Контроллер 170 ввода/вывода подключен к устройствам ввода-вывода (например, монитору 175, мыши, клавиатуре или другим устройствам ввода-вывода) и к линии 180 связи. Устройства ввода-вывода принимают и передают данные в аналоговой или числовой форме по линиям связи, таким как линия последовательной передачи, беспроводная линия связи (например, инфракрасного, радиочастотного диапазона или других), линия параллельной передачи или другой тип линии связи.
Линия 180 связи может включать в себя любого типа канал связи, соединитель, сеть передачи данных или другую линию связи. Например, линия 180 связи может включать в себя беспроводную или проводную сеть связи, локальную сеть (LAN), глобальную сеть (WAN), частную сеть, общедоступную сеть (такую как сеть Интернет), сеть стандарта WiFi, сеть, которая включает в себя спутниковую линию связи, или другой тип сети передачи данных.
Память 150 может хранить инструкции (например, машинный код), связанные с операционной системой, компьютерными приложениями и другими ресурсами. Память 150 может также хранить данные приложения и объекты данных, которые могут интерпретироваться одним или несколькими приложениями или виртуальными машинами, исполняющимися в вычислительной подсистеме 110. Как показано на Фиг. 1B, примерная память 150 включает в себя микросейсмические данные 151, геологические данные 152, данные 153 разрыва, прочие данные 155 и приложения 156. В некоторых реализациях память вычислительного устройства включает в себя дополнительную или другую информацию.
Микросейсмические данные 151 могут включать в себя информацию о местоположениях микросейсмов (микроземлетрясений) в подземной зоне. Например, микросейсмические данные могут включать в себя информацию на основании акустических данных, детектированных на наблюдательной скважине 104, на поверхности 106, на рабочей скважине 102 или в других местоположениях. Микросейсмические данные 151 могут включать в себя информацию, собранную посредством датчиков 112. В некоторых случаях, микросейсмические данные 151 объединялись с другими данными, повторно форматировались или иначе обрабатывались. Данные микросейсмического события могут включать в себя любую подходящую информацию, относящуюся к микросейсмическим событиям (местоположения, магнитуды, неопределенности, моменты времени и т.д.). Данные микросейсмического события могут включать в себя данные, накопленные от одной или нескольких операций гидроразрыва, которые могут включать в себя данные, накопленные до, в течение или после закачки текучей среды.
Геологические данные 152 могут включать в себя информацию о геологических характеристиках подземной зоны 121. Например, геологические данные 152 могут включать в себя информацию о подземных слоях 122, информацию о скважинных стволах 101, 111, или информацию о другие атрибутах подземной зоны 121. В некоторых случаях геологические данные 152 включают информацию о литологии, составе текучей среды, профиле напряжения, профиле давления, пространственной протяженности, или другие атрибуты одного или нескольких пластов пород в подземной зоне. Геологические данные 152 могут включать в себя информацию, собранную из каротажных диаграмм, образцов пород, выходов пород, построения микросейсмического изображения или других источников данных.
Данные 153 разрыва могут включать в себя информацию о плоскостях разрыва в подземной зоне. Данные 153 разрыва могут идентифицировать местоположения, размеры, формы и другие характеристики разрыва в модели подземной зоны. Данные 153 разрыва могут включать в себя информацию о природных разрывах, разрывах от гидроразрыва или любых искусственно образованных разрывах, или любом другом типе разрыва непрерывности или разрушений в подземной зоне 121. Данные 153 разрыва могут включать в себя плоскости разрыва, вычисленные из микросейсмических данных 151. Для каждой плоскости разрыва данные 153 разрыва могут включать в себя информацию (например, угол направления простирания, угол наклона и т.д.), идентифицирующую ориентацию разрыва, информацию, идентифицирующую форму (например, кривизну, апертуру и т.д.) разрыва, информацию, идентифицирующую границы, или любую другую подходящую информацию.
Приложения 156 могут включать в себя программно-реализованные приложения, сценарии, программы, функции, выполнимые программы или другие модули, которые интерпретируются или исполняются процессором 160. Такие приложения могут включать в себя машиночитаемые инструкции для выполнения одной или нескольких операций, представленных на Фиг. 4. Приложения 156 могут включать в себя машиночитаемые инструкции для формирования пользовательского интерфейса или диаграммы, таких как, например, представленные на Фиг. 2A, 2B, 3A или 3B. Приложения 156 могут получать входные данные, такие как микросейсмические данные, геологические данные или другие виды входных данных, из памяти 150, от другого локального источника, или от одного или нескольких удаленных источников (например, через линию 180 связи). Приложения 156 могут формировать выходные данные и сохранять выходные данные в памяти 150, на другом локальном носителе или в одном или нескольких удаленных устройствах (например, путем посылки выходных данных через линию 180 связи).
Процессор 160 может исполнять инструкции, например, чтобы формировать выходные данные, на основании вводов данных. Например, процессор 160 может выполнять приложения 156 путем исполнения или интерпретации программного обеспечения, сценариев, программ, функций, выполнимых программ или других модулей, содержащихся в приложениях 156. Процессор 160 может выполнять одну или несколько операций, представленных на Фиг. 4, или формировать один или несколько интерфейсов или диаграмм, показанных на Фиг. 2A, 2B, 3A или 3B. Входные данные, принимаемые процессором 160, или выходные данные, формируемые процессором 160, могут включать в себя любые данные из микросейсмических данных 151, геологических данных 152, данных 153 разрыва или прочие данные 155.
Фиг. 2A и 2B являются диаграммами, показывающими примерную плоскость 210 разрыва, идентифицированную из микросейсмических данных. Фиг. 2A представляет собой диаграмму 200a, показывающую перспективный вид плоскости 210 разрыва и девять микросейсмических событий 206a, 206b, 206c, 206d, 206e, 206f, 206g, 206h и 206i. Фиг. 2B является диаграммой 200b, показывающей вид сбоку плоскости 210 разрыва и те же девять микросейсмических событий 206a, 206b, 206c, 206d, 206e, 206f, 206g, 206h и 206i. Плоскость 210 разрыва может формироваться на основе микросейсмических событий, например, с использованием процесса 400, показанного на Фиг. 4, или с использованием другого процесса. Показаны девять микросейсмических событий; плоскость разрыва может быть вычислена исходя из различного числа событий (например, сотен событий, тысяч событий и т.д.).
Как показано на Фиг. 2A, примерная плоскость 210 разрыва является прямоугольной, двумерной поверхностью, простирающейся через трехмерное пространство. Плоскость разрыва может иметь другую форму (например, треугольную, эллипсоидальную, многоугольную, неправильную и т.д.). В некоторых случаях плоскость разрыва может быть трехмерным объемом, например, чтобы представлять ширину, апертуру или другие характеристики разрыва.
Параметры плоскости разрыва могут задаваться в любой подходящей системе координат. Например, плоскость разрыва может задаваться параметрами a, b, c и d уравнения 0=ax+by+cz+d, которое задает определение плоскости в системе yz-координат. Плоскость в трехмерном пространстве может иметь другие формулировки (формульные определения), такие как в цилиндрической системе координат, в сферической системе координат, в параметризованной системе координат и т.д., где каждая формулировка несет с собой четыре параметра для плоскости. В некоторых случаях границы плоскости разрыва или расширение плоскости разрыва могут задаваться многоугольником с k вершинами и таким образом - дополнительными 2k параметрами (например, четырьмя микросейсмическими событиями, расположенными на плоскости, каждое - с помощью двух координат, всего 8 параметров), или другой информацией. Например, граница плоскости разрыва может задаваться многоугольником, соединяющим наиболее удаленные микросейсмические события, проецируемые на плоскость разрыва. В некоторых случаях границы плоскости разрыва не задаются. Например, плоскость разрыва можно рассматривать в виде имеющей бесконечное протяжение. В некоторых реализациях плоскость разрыва может задаваться параметрами ориентации. Например, плоскость разрыва может задаваться углом направления простирания и углом наклона.
Как показано на Фиг. 2B, местоположение каждого микросейсмического события представляет собой конкретное расстояние от плоскости 210 разрыва. Например, микросейсмическое событие 206c представляет расстояние 220c от плоскости 210 разрыва, микросейсмическое событие 206d представляет расстояние 220d от плоскости 210 разрыва, микросейсмическое событие 206g представляет расстояние 220g от плоскости 210 разрыва и т.д. В некоторых случаях, одно или несколько микросейсмических событий лежат на плоскости разрыва.
Местоположение микросейсмического события может задаваться пространственными координатами. Координаты могут быть включены, например, в микросейсмические данные из операции гидроразрыва. В некоторых случаях координаты выводят на основе микросейсмических сигналов, детектированных от подземной зоны. В некоторых примерах местоположение i-го микросейсмического события может представляться посредством координат  , где xi представляет собой x координату для i-го микросейсмического события, yi представляет собой y координату для i-го микросейсмического события, zi представляет собой z координату для i-го микросейсмического события. Для плоскости разрыва, заданной в системе xyz-координат параметрами a, b, c и d, расстояние между i-ым микросейсмическим событием и плоскостью разрыва может представляться в виде
, где xi представляет собой x координату для i-го микросейсмического события, yi представляет собой y координату для i-го микросейсмического события, zi представляет собой z координату для i-го микросейсмического события. Для плоскости разрыва, заданной в системе xyz-координат параметрами a, b, c и d, расстояние между i-ым микросейсмическим событием и плоскостью разрыва может представляться в виде  . В некоторых случаях некоторые формулировки для плоскости в трехмерном пространстве могут иметь четыре параметра, и расстояние от плоскости может включать в себя числитель над знаменателем, где знаменатель - нелинейное выражение в параметрах плоскости, а числитель - линейная функция параметров микросейсмических событий. Может использоваться дополнительная или другая формулировка для общей плоскости и расстояния до плоскости в трехмерном пространстве.
. В некоторых случаях некоторые формулировки для плоскости в трехмерном пространстве могут иметь четыре параметра, и расстояние от плоскости может включать в себя числитель над знаменателем, где знаменатель - нелинейное выражение в параметрах плоскости, а числитель - линейная функция параметров микросейсмических событий. Может использоваться дополнительная или другая формулировка для общей плоскости и расстояния до плоскости в трехмерном пространстве.
Фиг. 3A и 3B являются диаграммами, показывающими примерную ориентацию плоскости разрыва. Фиг. 3 показывает диаграмму 300a примерной базовой плоскости 310, задаваемой тремя неколлинеарными микросейсмическими событиями 306a, 306b и 306c. Фиг. 3B показывает диаграмму 300b вектора 308 нормали к базовой плоскости 310, показанной на Фиг. 3A. На Фиг. 3A и 3B вертикальная ось 304a характеризует z-координату, горизонтальная ось 304b характеризует x-координату, и горизонтальная ось 304c характеризует y-координату. Диаграммы 300a и 300b показывают систему прямолинейных координат; могут использоваться другие типы систем координат (например, сферическая, эллиптическая и т.д.).
Как показано на Фиг. 3A, базовая плоскость 310 является двумерной поверхностью, которая простирается через пространственную систему xyz-координат. Вектор 308 нормали указывает ориентацию базовой плоскости 310. Вектор нормали может быть единичным вектором (вектором единичной длины), или вектор нормали может иметь неединичную длину.
Как показано на Фиг. 3B, вектор 308 нормали имеет компоненты (a, b, c) вектора. Компоненты (a, b, c) вектора могут вычисляться, например, на основании позиций микросейсмических событий 306a, 306b и 306c, на основании параметров базовой плоскости 310 или на основании другой информации. На диаграмме 300b x-компонент вектора 308 нормали представлен в виде длины a по оси X, y-компонент вектора 308 нормали представлен в виде длины b по оси Y, и z-компонент вектора 308 нормали представлен в виде длины c по оси Z. (В показанном примере y-компонент b имеет отрицательное значение).
Ориентация базовой плоскости 310 может вычисляться на основе вектора 308 нормали, микросейсмических событий непосредственно, параметров базовой плоскости 310, других данных, или любой их комбинации. Например, наклон θ и направление φ простирания базовой плоскости 310 могут вычисляться из вектора 308 нормали на основании уравнений
 (1)
(1)
Угол θ наклона плоскости разрыва может представлять собой угол между плоскостью разрыва и горизонтальной плоскостью (например, xy-плоскостью). Угол φ направления простирания плоскости разрыва может представлять собой угол между горизонтальной опорной осью (например, осью X) и горизонтальной линией, где плоскость разрыва пересекает горизонтальную плоскость. Например, угол направления простирания может быть определен относительно направления на Север или другого горизонтального опорного направления. Плоскость разрыва может задаваться другими параметрами, включая угловые параметры, отличные от угла направления простирания и угла наклона.
В некоторых случаях, ориентация одной или нескольких базовых плоскостей может использоваться в качестве входной для формирования данных гистограммы. Например, гистограмма ориентаций базовых плоскостей может формироваться на основе набора базовых плоскостей. В некоторых случаях данные гистограммы формируются путем назначения каждой базовой плоскости элемента разрешения на основании ориентации (θ, φ) базовой плоскости и вычисления количества базовых плоскостей, связанных с каждым элементом разрешения. В некоторых случаях гистограмма изображается графически, или данные гистограммы могут использоваться или обрабатываться без визуального отображения гистограммы.
В некоторых случаях параметры одной или нескольких базовых плоскостей могут использоваться в качестве начальных условий для решения системы уравнений. Например, ориентация базовой плоскости может использоваться в качестве начальных условий, идентифицированных на этапе 406 в процессе 400, показанном на Фиг. 4. В некоторых случаях параметры базовой плоскости используются в качестве начальных условий для нахождения плоскости разрыва. Результирующая плоскость разрыва не обязательно связывается с базовой плоскостью или каким-либо из событий в базовой плоскости.
Фиг. 4 является блок-схемой примерного процесса 400 для идентификации плоскости разрыва из микросейсмических данных. Некоторые операции или все из операций в процессе 400 могут быть реализованы одним или несколькими вычислительными устройствами. В некоторых реализациях процесс 400 может включать в себя дополнительные, меньше по количеству или отличающиеся операции, выполняемые в том же или другом порядке. Кроме того, одна или большее число отдельных операций или подмножеств операций в процессе 400 могут выполняться обособленно или в другие контекстах. Выходные данные, формируемые процессом 400, включая выходные данные, формируемые промежуточными операциями, могут включать в себя сохраняемую, отображаемую, печатаемую, передаваемую, обмениваемую или обработанную информацию.
В некоторых реализациях некоторые операции или все из операций в процессе 400 исполняются в реальном времени в течение операции гидроразрыва. Операция может выполняться в реальном времени, например, путем выполнения операции в ответ на прием данных (например, от системы с датчиками или мониторинга) без существенной задержки. Операция может выполняться в реальном времени, например, путем выполнения операции в ходе мониторинга дополнительных микросейсмических данных из операции гидроразрыва. Некоторые операции реального времени могут принимать входные данные и выдавать выходные данные в течение операции гидроразрыва; в некоторых случаях выходные данные делают доступными пользователю внутри временного кадра, каковое дает возможность пользователю отвечать на выходные данные, например, путем модификации операции гидроразрыва.
В некоторых случаях некоторые операции или все из операций в процессе 400 исполняются динамически в течение операции гидроразрыва. Операция может исполняться динамически, например, путем итерационного или многократного выполнения операции на основании дополнительных вводов, например, если вводы делают доступными. В некоторых случаях динамические операции выполняются в ответ на прием данных относительно нового микросейсмического события (или в ответ на прием данных относительно некоторого числа новых микросейсмических событий и т.д.). В некоторых реализациях некоторые операции или все из операций могут выполняться в реальном времени. Например, вычисления или операции могут исполняться в том же временном потоке или лучшем временном потоке, чем поток событий. Например, операция может исполняться, как только новое событие поступает во входной буфер. В некоторых случаях новейшая проанализированная информация может представляться пользователю в реальном времени, например, всякий раз при запросе пользователя. В некоторых реализациях некоторые или все из операций могут иметь некоторую величину задержки (например, главным образом задержку одного события или задержку другой максимальной длительности).
Примерный процесс 400 может использоваться, чтобы идентифицировать параметр плоскости разрыва на основании данных микросейсмических событий. Например, параметры плоскости разрыва могут быть параметрами a, b, c и d в уравнении 0=ax+by+cz+d, которое задает определение плоскости в системе yz-координат. Могут быть идентифицированы дополнительные или отличающиеся параметры плоскости разрыва. В некоторых случаях процесс 400 используют для идентификации параметров плоскости разрыва в другой системе координат (например, в сферической системе координат и т.д.).
В некоторых случаях процесс 400 используют для идентификации параметров плоскости разрыва, которые включают в себя угол направления простирания и наклона плоскости разрыва.
На этапе 402 принимают микросейсмические данные по операции гидроразрыва. Например, микросейсмические данные могут приниматься из памяти, от удаленного устройства или другого источника. Данные микросейсмического события могут включать в себя информацию о замеренных местоположениях множества микросейсмических событий, информацию о замеренной магнитуде каждого микросейсмического события, информацию о неопределенности, связанной с каждым микросейсмическим событием, информацию о времени, связанном с каждым микросейсмическим событием, и т.д. Данные микросейсмического события могут включать в себя микросейсмические данные, накопленные в наблюдательной скважине, в рабочей скважине, на поверхности или в других местоположениях в системе скважин. Микросейсмические данные по операции гидроразрыва могут включать в себя данные относительно микросейсмических событий, детектированных до, в течение или после применения операции гидроразрыва. Например, в некоторых случаях микросейсмический мониторинг начинается до применения операции гидроразрыва, оканчивается после применения операции гидроразрыва, или и то, и другое.
На этапе 404 выбирают подмножество микросейсмических событий. Подмножество микросейсмических событий может выбираться из микросейсмических данных, например, на основании критерия выбора, фильтрации данных или других способов. В некоторых случаях подмножество выбирают на основании тренда в микросейсмических данных. Например, выбранное подмножество микросейсмических событий может задать кластер ориентаций базовой плоскости. Кластеры ориентаций базовых плоскостей могут быть идентифицированы, например, путем создания гистограммы ориентаций базовой плоскости, заданных неколлинеарными триплетами в микросейсмических данных. Кластеры ориентаций базовых плоскостей могут быть идентифицированы путем формирования данных гистограммы или другими способами. Примерные способы для формирования данных гистограммы описаны в предварительной заявке на патент США №61/710582, поданной 5 октября 2012.
В некоторых реализациях подмножество микросейсмических событий выбирают на основании предварительно идентифицированных плоскостей разрыва. Например, в некоторых случаях две или большее число предварительно сформированных плоскостей разрыва объединяются в единую плоскость разрыва. Могут объединяться плоскости разрыва, например, в случае где две плоскости разрыва являются близкими друг к другу (например, параллельные или по существу параллельные плоскости разрыва в пределах порогового расстояния друг от друга), где две плоскости разрыва пересекаются под малым углом (например, параллельные, или по существу параллельные плоскости разрыва, которые пересекают друг друга). Множество микросейсмических событий может выбираться (на этапе 404) путем объединения наборов микросейсмических событий, связанных с предварительно идентифицированными плоскостями разрыва. В качестве другого примера, в некоторых случаях новое микросейсмическое событие добавляется к предварительно сформированной плоскости разрыва. Одно или несколько новых микросейсмических событий могут добавляться к предварительно сформированной плоскости разрыва, например, когда детектируют новое микросейсмическое событие, когда микросейсмическое событие разъединяют с другой плоскостью разрыва, или в других случаях.
На этапе 406 идентифицируют начальные значения для параметров плоскости разрыва. Начальные значения могут быть, например, параметрами предварительно сформированной плоскости разрыва или могут использоваться другие начальные значения. В некоторых случаях начальные значения идентифицируют на основании подмножества микросейсмических событий. Например, начальные значения могут быть идентифицированы путем выбора трех (или более) неколлинеарных микросейсмических событий в подмножестве и определения ориентации базовой плоскости, задаваемой выбранными событиями. В некоторых реализациях начальные значения могут быть идентифицированы, например, путем формирования двумерной истинной гистограммы (например, в углах направления простирания и наклона); выборки пикового значения гистограммы, которая является ближайшей к текущей ориентации плоскости разрыва, и идентификации начальных значений на основании соответствующей ориентации пикового значения.
На этапе 412 строится система уравнений. Система уравнений может включать в себя четыре уравнения или другое количество уравнений. Система уравнений может включать в себя линейные уравнения, нелинейные уравнения или комбинацию линейных и нелинейных уравнений. В некоторых случаях система уравнений включает независимое уравнение для каждого параметра плоскости разрыва. Например, если плоскость разрыва задается четырьмя параметрами a, b, c и d в уравнении 0=ax+by+cz+d, которое задает плоскость в системе yz-координат, система уравнений может включать четыре независимых уравнения. В некоторых случаях система уравнений включает в себя дополнительные вспомогательные уравнения, например, чтобы ввести физические ограничения, константы, или другую информацию.
В некоторых реализациях некоторые или все уравнения в системе уравнений строятся на основе взвешенной суммы. Например, система уравнений может быть набором уравнений  , где S представляет собой взвешенную сумму, и a, b, c и d являются параметрами плоскости разрыва. В этом примере
, где S представляет собой взвешенную сумму, и a, b, c и d являются параметрами плоскости разрыва. В этом примере  представляет собой частную производную взвешенной суммы по параметру a плоскости разрыва,
представляет собой частную производную взвешенной суммы по параметру a плоскости разрыва,  представляет собой частную производную взвешенной суммы по параметру b плоскости разрыва,
представляет собой частную производную взвешенной суммы по параметру b плоскости разрыва,  представляет собой частную производную взвешенной суммы по параметру c плоскости разрыва, и d0 представляет собой постоянное значение для параметра d плоскости разрыва. Также в этой примерной системе уравнений каждая частная производная приравнивается к нулю, чтобы найти решение, которое минимизирует вариацию взвешенной суммы по каждому параметру плоскости разрыва. В некоторых случаях три уравнения из общих уравнений для параметров могут порождаться требованием минимизации, и четвертое может быть алгебраическим соотношением между параметрами. Другие типы уравнений могут включаться в систему уравнений. В некоторых случаях один или несколько членов или значений в системе уравнений вычисляют на основании выбранного подмножества микросейсмических событий и начальных условий. Вышеупомянутый алгоритм может уловить и локальный, и глобальный минимумы. В некоторых случаях, чем лучше качество начальных условий, тем выше будут вероятности схождения алгоритма к надлежащему глобальному минимуму. Вышеупомянутые способы для осуществления выбора надлежащих начальных условий могут помочь гарантировать сходимость к глобальному минимуму. Дополнительный или другой способ может использоваться для локализации глобального минимума.
представляет собой частную производную взвешенной суммы по параметру c плоскости разрыва, и d0 представляет собой постоянное значение для параметра d плоскости разрыва. Также в этой примерной системе уравнений каждая частная производная приравнивается к нулю, чтобы найти решение, которое минимизирует вариацию взвешенной суммы по каждому параметру плоскости разрыва. В некоторых случаях три уравнения из общих уравнений для параметров могут порождаться требованием минимизации, и четвертое может быть алгебраическим соотношением между параметрами. Другие типы уравнений могут включаться в систему уравнений. В некоторых случаях один или несколько членов или значений в системе уравнений вычисляют на основании выбранного подмножества микросейсмических событий и начальных условий. Вышеупомянутый алгоритм может уловить и локальный, и глобальный минимумы. В некоторых случаях, чем лучше качество начальных условий, тем выше будут вероятности схождения алгоритма к надлежащему глобальному минимуму. Вышеупомянутые способы для осуществления выбора надлежащих начальных условий могут помочь гарантировать сходимость к глобальному минимуму. Дополнительный или другой способ может использоваться для локализации глобального минимума.
В показанном на Фиг. 4 примере взвешенную сумму идентифицируют на этапе 408, и весовую функцию идентифицируют на этапе 410. Взвешенная сумма, весовая функция или обе могут выбираться или иным образом идентифицироваться на основании пользовательского ввода, на основании микросейсмических событий или другой информации. В некоторых случаях взвешенная сумма и весовая функция задаются предварительно установленными параметрами. Например, взвешенная сумма и весовая функция могут быть идентифицированы независимо от пользовательского ввода или микросейсмических данных.
В некоторых примерах взвешенная сумма представляется в виде  . Здесь N представляет собой число точек микросейсмических данных в подмножестве, выбранном на этапе 404, wi представляет собой весовой множитель для i-го члена взвешенной суммы, i-ый член представляет собой вклад i-го события, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и f(hi) является функцией расстояния hi. В некоторых случаях функция f(hi), весовой множитель w, или и то, и другое, зависят от местоположения микросейсмического события и его неопределенности для микросейсмического события. Например, функция f(hi) может зависеть от неопределенности местоположения для i-го микросейсмического события. В некоторых примерах взвешенная сумма представляется в виде S=
. Здесь N представляет собой число точек микросейсмических данных в подмножестве, выбранном на этапе 404, wi представляет собой весовой множитель для i-го члена взвешенной суммы, i-ый член представляет собой вклад i-го события, hi представляет собой расстояние i-го микросейсмического события от плоскости разрыва, и f(hi) является функцией расстояния hi. В некоторых случаях функция f(hi), весовой множитель w, или и то, и другое, зависят от местоположения микросейсмического события и его неопределенности для микросейсмического события. Например, функция f(hi) может зависеть от неопределенности местоположения для i-го микросейсмического события. В некоторых примерах взвешенная сумма представляется в виде S= . Здесь hmax представляет собой расстояние между плоскостью разрыва и микросейсмическим событием, которое максимально отделено от плоскости разрыва.
. Здесь hmax представляет собой расстояние между плоскостью разрыва и микросейсмическим событием, которое максимально отделено от плоскости разрыва.
В некоторых примерах функция f принимает форму абсолютной величины (модуля), и взвешенная сумма представляется в виде  . В некоторых случаях, эта система уравнений является «более нелинейной», чем другие представления наименьших квадратов для взвешенной суммы. По существу в некоторых случаях другие способы (например, с несобственными производными) могут использоваться для оптимизации, может потребоваться больше итераций, и может быть найдено более строгое решение, каковое может приводить к большему количеству плоскостей разрыва с меньшим поддерживаемым базисом.
. В некоторых случаях, эта система уравнений является «более нелинейной», чем другие представления наименьших квадратов для взвешенной суммы. По существу в некоторых случаях другие способы (например, с несобственными производными) могут использоваться для оптимизации, может потребоваться больше итераций, и может быть найдено более строгое решение, каковое может приводить к большему количеству плоскостей разрыва с меньшим поддерживаемым базисом.
В некоторых реализациях множество различных взвешенных сумм могут использоваться в комбинации. Например, одна из взвешенных сумм (например,  ) может использоваться для обеспечения начального условия, тогда как другая взвешенная сумма (например,
) может использоваться для обеспечения начального условия, тогда как другая взвешенная сумма (например,  ) может использоваться для нахождения окончательного решения. Могут использоваться другие комбинации. Для некоторых формулировок можно показать, что решение всегда есть.
) может использоваться для нахождения окончательного решения. Могут использоваться другие комбинации. Для некоторых формулировок можно показать, что решение всегда есть.
Функцией f во взвешенной сумме может быть, например,  ,
,  , или может использоваться другая функция. Для плоскости разрыва, задаваемой в системе yz-координат параметрами a, b, c и d, расстояние между i-ым микросейсмическим событием и плоскостью разрыва может представляться в виде hi=
, или может использоваться другая функция. Для плоскости разрыва, задаваемой в системе yz-координат параметрами a, b, c и d, расстояние между i-ым микросейсмическим событием и плоскостью разрыва может представляться в виде hi= . Здесь xi представляет собой x координату i-го микросейсмического события, yi представляет собой y координату i-го микросейсмического события, zi представляет собой z координату i-го микросейсмического события. Другие функции могут использоваться во взвешенной сумме, и расстояние hi может вычисляться другим образом, например, с использованием параметров для другой системы координат.
. Здесь xi представляет собой x координату i-го микросейсмического события, yi представляет собой y координату i-го микросейсмического события, zi представляет собой z координату i-го микросейсмического события. Другие функции могут использоваться во взвешенной сумме, и расстояние hi может вычисляться другим образом, например, с использованием параметров для другой системы координат.
Весовой множитель для i-го члена может вычисляться согласно весовой функции, идентифицированной на этапе 410. Например, весовой множитель wi может представляться функцией  , где α обычно имеет значение между нулем и единицей, и например, может зависеть от функции f. В качестве другого примера весовой множитель wi может представляться функцией
, где α обычно имеет значение между нулем и единицей, и например, может зависеть от функции f. В качестве другого примера весовой множитель wi может представляться функцией  . В качестве еще одного примера весовой множитель wi может представляться «магической» функцией wi=
. В качестве еще одного примера весовой множитель wi может представляться «магической» функцией wi= , где α и β - постоянные значения, которые могут быть управляемыми или оптимизируемыми в некоторых случаях. Во всех этих примерах весовой множитель уменьшается нелинейно с расстоянием между i-ым микросейсмическим событием и плоскостью разрыва. Например,
, где α и β - постоянные значения, которые могут быть управляемыми или оптимизируемыми в некоторых случаях. Во всех этих примерах весовой множитель уменьшается нелинейно с расстоянием между i-ым микросейсмическим событием и плоскостью разрыва. Например,  уменьшается экспоненциально, и
уменьшается экспоненциально, и  уменьшается полиномиально. Другие весовые функции могут использоваться, чтобы определять весовой множитель для каждого члена. Весовой множитель может уменьшаться линейно или нелинейно с указанной скоростью. В некоторых случаях, размерностями α и β являются единица на квадрат длины. В более общем смысле α и β сами могут быть функцией от hi 2.
уменьшается полиномиально. Другие весовые функции могут использоваться, чтобы определять весовой множитель для каждого члена. Весовой множитель может уменьшаться линейно или нелинейно с указанной скоростью. В некоторых случаях, размерностями α и β являются единица на квадрат длины. В более общем смысле α и β сами могут быть функцией от hi 2.
В некоторых случаях для данной плоскости разрыва можно вычислить среднее абсолютное значение расстояния событий от плоскости, µ, и стандартное отклонение, σ. Затем представитель размера кластера вокруг плоскости может быть задан в виде, например,  , где k может быть константой, например, k=1. В одном примере взвешенные коэффициенты могут задаваться в виде
, где k может быть константой, например, k=1. В одном примере взвешенные коэффициенты могут задаваться в виде  , где α является положительным числом, обычно между 0 и 1. Другие возможные варианты для взвешенного коэффициента могут использоваться, например,
, где α является положительным числом, обычно между 0 и 1. Другие возможные варианты для взвешенного коэффициента могут использоваться, например,  и wi=(α+(hi/h)2β)-1. В течение итераций, каждый раз, когда получают приближения для параметров плоскости, может повторно вычисляться значение h (таким образом - значение для µ и σ), и могут вычисляться новые значения для взвешенных коэффициентов.
и wi=(α+(hi/h)2β)-1. В течение итераций, каждый раз, когда получают приближения для параметров плоскости, может повторно вычисляться значение h (таким образом - значение для µ и σ), и могут вычисляться новые значения для взвешенных коэффициентов.
В некоторых случаях, весовым множителем для i-го члена взвешенной суммы является  , и αi имеет значение между нулем и единицей. В некоторых случаях весовым множителем для i-го члена взвешенной суммы является
, и αi имеет значение между нулем и единицей. В некоторых случаях весовым множителем для i-го члена взвешенной суммы является  , и αi имеет предопределенное постоянное значение. В некоторых случаях весовым множителем для i-го члена взвешенной суммы является
, и αi имеет предопределенное постоянное значение. В некоторых случаях весовым множителем для i-го члена взвешенной суммы является  , где αi и βi - предопределенные постоянные значения.
, где αi и βi - предопределенные постоянные значения.
Различные весовые множители могут давать подобные результаты. Некоторые контрольные примеры показывают, что для некоторых наборов данных имеется небольшое различие в рабочей характеристике алгоритма для различных возможных вариантов весовой функции  . Может быть различие, например, при одном или небольшом количестве экстремальных микросейсмических событий. В некоторых из контрольных примеров результаты были почти идентичными для различных весовых функций, каковое подсказывает строго поддерживаемые плоскости разрыва.
. Может быть различие, например, при одном или небольшом количестве экстремальных микросейсмических событий. В некоторых из контрольных примеров результаты были почти идентичными для различных весовых функций, каковое подсказывает строго поддерживаемые плоскости разрыва.
На этапе 414 идентифицируют решение системы уравнений. В некоторых случаях может быть найдено аналитическое решение (например, согласно способам исключения, способам обращения и т.д.). Для типового набора микросейсмических данных не имеется аналитического решения, и система уравнений решается численными методами. Примерные численные методы для решения системы уравнений включают численный метод Ньютона, метод Ньютона-Рафсона, метод сопряженных градиентов и другие. В некоторых случаях численное решение для системы уравнений вычисляют с использованием итерационных методов. Отличающийся набор начальных условий может использоваться в каждой итерации. В некоторых случаях начальные условия для данной итерации выводят на основе приближенного решения, выдаваемого предшествующей итерацией. В некоторых случаях начальные условия для каждой итерации получают из отличающейся группы микросейсмических событий. Например, алгоритм может проходить через начальные условия, выведенные исходя из каждой ориентации базовой плоскости в указанном диапазоне ориентаций. В системе могут выполняться итерации, например, до тех пор, пока решение не сойдется (например, когда приближенное решение не изменяется или изменяется минимально на последующих итерациях), пока не завершится конкретное количество итераций, пока не пройдет указанное количество времени, или пока не достигнуто другое условие завершения. В некоторых случаях система уравнений выдает одинаковое решение для любого набора начальных условий. Другими словами, решение системы уравнений может быть одинаковым или по существу одинаковым, независимо от начальных условий, которые используются.
На этапе 416 параметры плоскости разрыва определяют из решения, идентифицированного на этапе 414. Параметрами плоскости разрыва могут быть, например, один или несколько параметров a, b, c и d в уравнении 0=ax+by+cz+d, которое задает определение плоскости в системе yz-координат. Дополнительные или отличающиеся параметры плоскости разрыва (например, параметры в другой системе координат, угол направления простирания, угол наклона и т.д.) могут быть идентифицированы. В некоторых случаях также вычисляют границы или другие параметры плоскости разрыва. Параметры плоскости разрыва могут быть идентифицированы, например, на основании численного решения системы уравнений. В некоторых случаях параметры плоскости разрыва идентифицируют исходя из выходных данных конечной итерации в итерационном методе.
На этапе 418 плоскость разрыва визуально отображают, или плоскость разрыва обновляют, или выполняют и то, и другое. Плоскость разрыва может быть визуально отображена, например, путем отображения графического изображения плоскости разрыва, путем отображения параметров плоскости разрыва или путем отображения численного представления плоскости разрыва. Примерные способы для представления плоскостей разрыва описаны в предварительной заявке на патент США №61/710582, поданной 5 октября 2012.
Плоскость разрыва может обновляться, например, на основании дополнительных микросейсмических данных, на основании слияния плоскости разрыва с другой плоскостью разрыва, на основании другого численного решения системы уравнений, на основании последующих итераций, на основании других начальных условий или на основании другой информации. Примерные способы для обновления плоскостей разрыва из микросейсмических данных описаны в предварительной заявке на патент США №61/710582, поданной 5 октября 2012. В некоторых случаях плоскости разрыва обновляют в реальном времени, например, в ответ на накопление микросейсмических данных.
Некоторые варианты осуществления объекта изобретения и операций, приведенных в этом описании, могут быть реализованы в цифровой электронной схеме либо в компьютерном программном обеспечении, микропрограммном обеспечении или аппаратном обеспечении, включая раскрытые в этом описании структуры и их структурные эквиваленты, либо в виде комбинаций из одного или нескольких из них. Некоторые варианты осуществления объекта изобретения, представленного в этом описании, могут быть реализованы в виде одной или нескольких компьютерных программ, то есть, одного или нескольких модулей инструкций компьютерной программы, закодированных на носителе данных компьютера, для исполнения посредством устройства обработки данных или для управления его работой. Носитель данных компьютера может являть собой или может включаться в машиночитаемое запоминающее устройство, машиночитаемую запоминающую подложку, матрицу или устройство памяти с произвольным или последовательным доступом, или комбинацию из одного или нескольких из них. Кроме того, тогда как носитель данных компьютера не является распространяемым сигналом, носитель данных компьютера может быть источником или получателем инструкций компьютерной программы, закодированных в искусственно генерируемом распространяемом сигнале. Носитель данных компьютера может также являть собой или включаться в один или несколько отдельных физических компонентов или носителей (например, множество компакт-дисков (CD), дисковые ЗУ или другие запоминающие устройства).
Термин "устройство обработки данных" охватывает все виды аппаратур, устройств и машин для обработки данных, включая в качестве примера программируемый процессор, компьютер, систему на кристалле, либо множество отдельных, либо комбинации, для вышеизложенного. Устройство может включать в себя логическую схему специального назначения, например, программируемую вентильную матрицу (FPGA) или специализированную интегральную схему (ASIC). Устройство может также в дополнение к аппаратным средствам включать в себя код, который создает среду выполнения для рассматриваемой компьютерной программы, например, код, который составляет микропрограммное обеспечение процессора, стек протоколов, систему управления базами данных, операционную систему, межплатформенную среду выполнения, виртуальную машину или комбинацию из одного или нескольких из них. Устройство и среда выполнения могут реализовывать многие различные инфраструктуры модели вычислений, такие как инфраструктуры веб-служб, распределенных вычислений и сетевых вычислений.
Компьютерная программа (также известная как программа, программное обеспечение, приложение, сценарий или код) может быть записана на языке программирования любого вида, включая компилируемые или интерпретируемые языки, декларативные или процедурные языки. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может сохраняться в порции файла, который содержит другие программы или данные (например, один или несколько сценариев, хранимых в документе на языке разметки), в одном файле, предназначенном для рассматриваемой программы, или в множестве согласованных файлов (например, файлов, которые хранят один или несколько модулей, подпрограмм или порций кода). Компьютерная программа может быть развернута, чтобы подлежать исполнению, на одном компьютере или на множестве компьютеров, которые расположены на одном участке или распределены по множественным участкам и соединены сетью связи.
Некоторые из процессов и логических потоков, приведенных в этом описании, могут выполняться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ, чтобы выполнять действия по оперированию входными данными и формированию выхода. Процессы и логические потоки могут также выполняться посредством, и устройство также может быть реализовано в виде, логической схемы специального назначения, например, программируемой вентильной матрицы (FPGA) или специализированной интегральной схемы (ASIC).
Процессоры, подходящие для исполнения компьютерной программы, включают в себя, в качестве примера, и универсальные, и специализированные микропроцессоры, и процессоры цифрового компьютера любого вида. Обычно, процессор будет принимать инструкции и данные из постоянной памяти или оперативной памяти, или из обеих. Компьютер включает в себя процессор для выполнения действий в соответствии с инструкциями и одно или несколько запоминающих устройств для хранения инструкций и данных. Компьютер может также включать в себя, или являться функционально связанным для приема данных от (устройства) или передачи данных на (устройство), или для обоего, с одним или несколькими запоминающими устройствами большой емкости для сохранения данных, например, магнитными, магнитооптическими дисками или оптическими дисками. Однако, компьютер не обязан иметь такие устройства. Устройства, подходящие для хранения инструкций компьютерной программы и данных, включают в себя все виды энергонезависимой памяти, устройств хранения данных и запоминающих устройств, включая в качестве примера устройства полупроводниковой памяти (например, стираемое программируемое постоянное запоминающее устройство (EPROM), электрически-стираемое программируемое ПЗУ (EEPROM), устройства флэш-памяти и другие), магнитные диски (например, внутренние накопители на жестких дисках, съемные диски и другие), магнитооптические диски, и диски ПЗУ на компакт-диске (CD-ROM) и цифровом многофункциональном диске (DVD-ROM). Процессор и память могут дополняться логической схемой специального назначения или встраиваться в таковую.
Для обеспечения взаимодействия с пользователем, операции могут быть реализованы на компьютере, имеющем устройство отображения (например, монитор, или другой тип устройства отображения), чтобы отображать информацию пользователю, и клавиатуру и указательное устройство (например, мышь, шаровой манипулятор, планшет, сенсорный экран, или другой тип указательного устройства), посредством которого пользователь может обеспечивать ввод в компьютер. Другие виды устройств также могут использоваться для обеспечения взаимодействия с пользователем; например, обратная связь, предоставляемая пользователю, может быть любой формой сенсорной обратной связи, например, визуальной обратной связью, звуковой обратной связью или тактильной обратной связью; и ввод от пользователя может приниматься в любой форме, включая звуковой, речевой или тактильный ввод. Кроме того, компьютер может взаимодействовать с пользователем путем посылки документов и приема документов от устройства, которое используется пользователем; например, путем посылки веб-страницы на веб-браузер в клиентском устройстве пользователя в ответ на запросы, принятые от веб-браузера.
Клиент и сервер обычно удалены друг от друга и обычно взаимодействует через сеть связи. Примеры сетей связи включают в себя локальную сеть ("LAN") и глобальную сеть ("WAN"), объединенную сеть (например, сеть Интернет), сеть, содержащую спутниковую линию связи, и одноранговые сети (например, специализированные одноранговые сети). Взаимосвязь клиента и сервера возникает с помощью компьютерных программ, исполняющихся на соответственных компьютерах и имеющих взаимосвязь «клиент-сервер» по отношению к друг другу.
В некоторых аспектах некоторые или все признаки, описанные в документе, могут объединяться или реализовываться отдельно в одной или нескольких программно реализованных программах для автоматизированного построения карт разрывов в реальном времени. Программное обеспечение может быть реализовано в виде компьютерного программного продукта, установленного приложения, приложения клиент-сервер, Интернет-приложения или любого другого подходящего типа программного обеспечения. В некоторых случаях программа автоматизированного построения карт разрывов в реальном времени может динамически показывать пользователям пространственную и временную эволюцию в идентифицированных плоскостях разрыва в реальном времени по мере постепенного накопления микросейсмических событий. Динамика может включать в себя, например, формирование новых разрывов, распространение и развитие существующих разрывов, или другую динамику. В некоторых случаях программа автоматизированного построения карт разрывов в реальном времени может предоставлять пользователям возможность просматривать идентифицированные плоскости разрыва в реальном времени на многих уровнях доверительной вероятности. В некоторых случаях пользователи могут наблюдать пространственную и временную эволюцию разрывов с высоким уровнем доверительной вероятности, каковое может показать доминирующие тренды полных данных микросейсмических событий. В некоторых случаях программа автоматизированного построения карт разрывов в реальном времени может вычислять значение достоверности точности для разрыва, например, чтобы замерить определенность идентифицированных плоскостей разрыва. Значения достоверности точности могут, например, помочь пользователям лучше понимать и анализировать изменения в вероятностной гистограмме или распределении ориентаций, которое может непрерывно меняться по мере накопления в реальном времени микросейсмических событий. В некоторых случаях программа автоматизированного построения карт разрывов в реальном времени может обеспечивать результаты, которые согласуются с картированием разрывов по послеоперационным данным. Например, в конце операции гидроразрыва пласта, результаты, выдаваемые программой автоматизированного построения карт разрывов в реальном времени, могут быть статистически совместимыми с таковыми, полученными программой автоматизированного построения карт разрывов по послеоперационным данным, оперирующей теми же данными. Такие функциональные возможности могут позволять специалистам по эксплуатации, операторам и аналитикам динамически визуализировать и контролировать пространственную и временную эволюцию разрывов от гидроразрыва, анализировать сложность разрыва и геометрию коллектора, оценивать эффективность операции гидроразрыва и улучшать технологические показатели скважины.
Хотя это описание содержит многие подробности, их следует рассматривать не в качестве ограничений на объем заявленного в формуле изобретения, а предпочтительнее в качестве описаний признаков, специфических для конкретных примеров. Некоторые признаки, представленные в этом описании в контексте отдельных реализаций, также могут комбинироваться. Напротив, различные признаки, которые описаны в контексте одной реализации, могут также реализовываться во множестве вариантов осуществления отдельно или в любой подходящей подкомбинации.
Были описаны несколько вариантов осуществления. Однако будет признано, что могут делаться различные модификации. Соответственно, прочие варианты осуществления находятся в рамках объема последующей формулы изобретения.

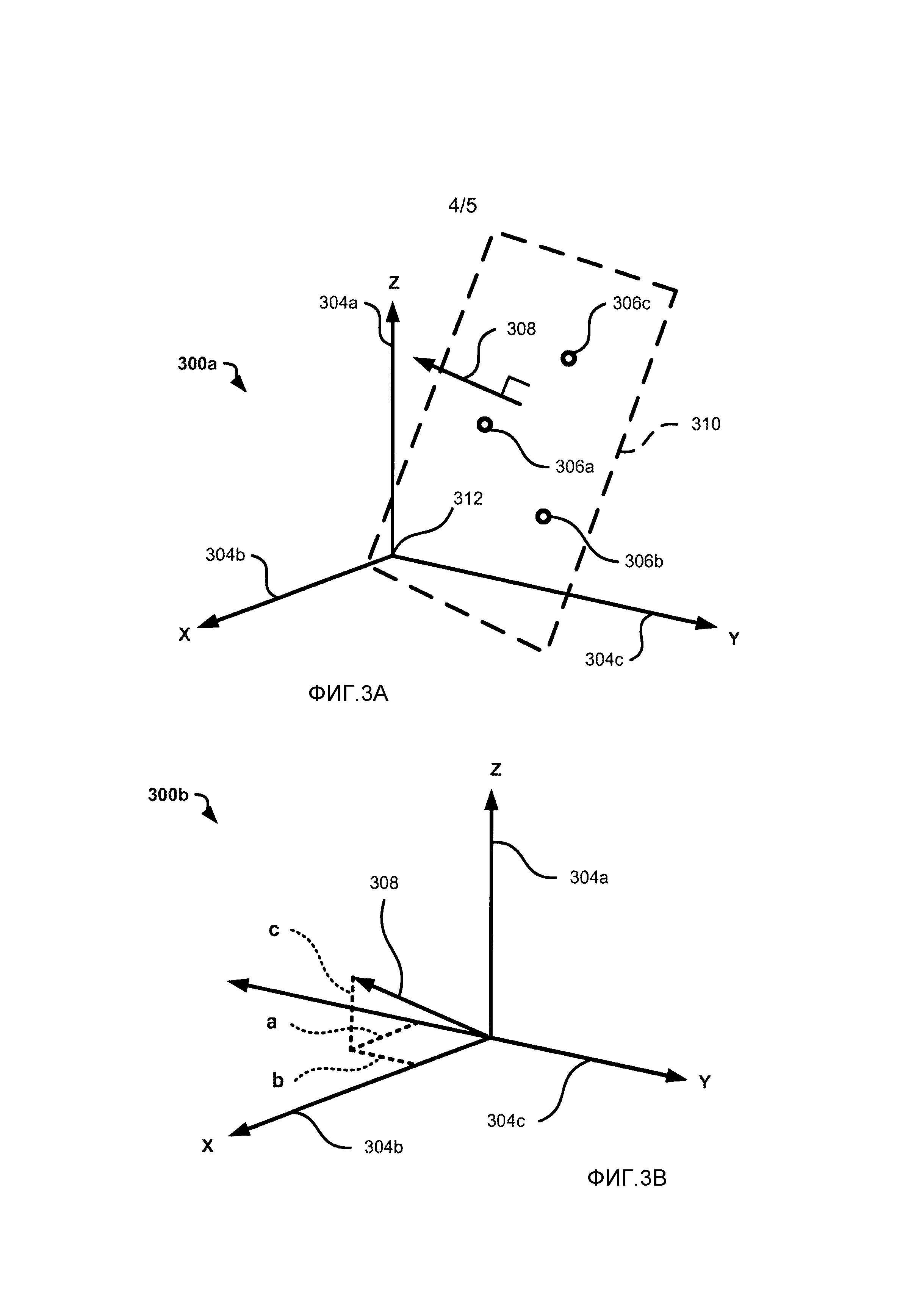

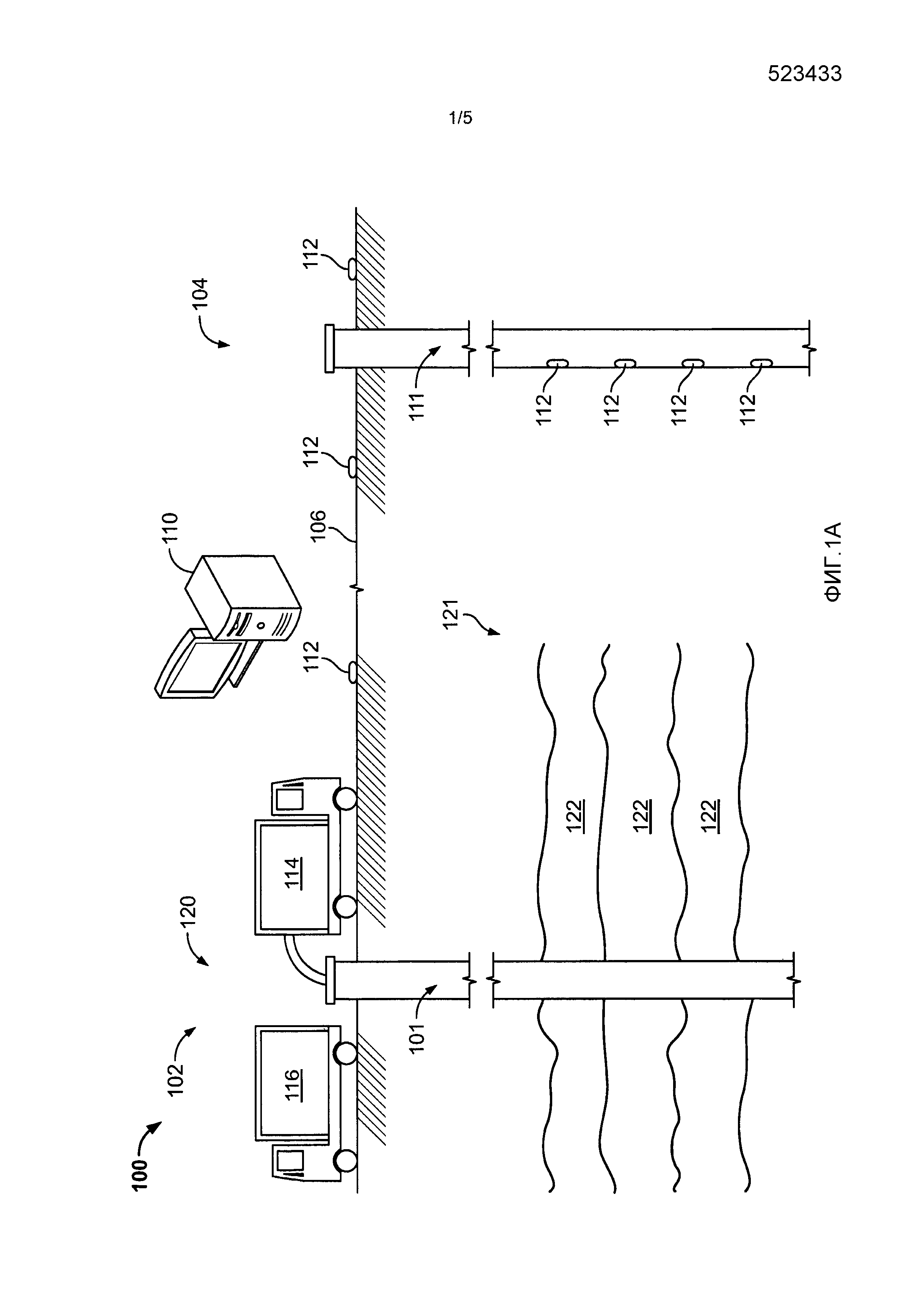
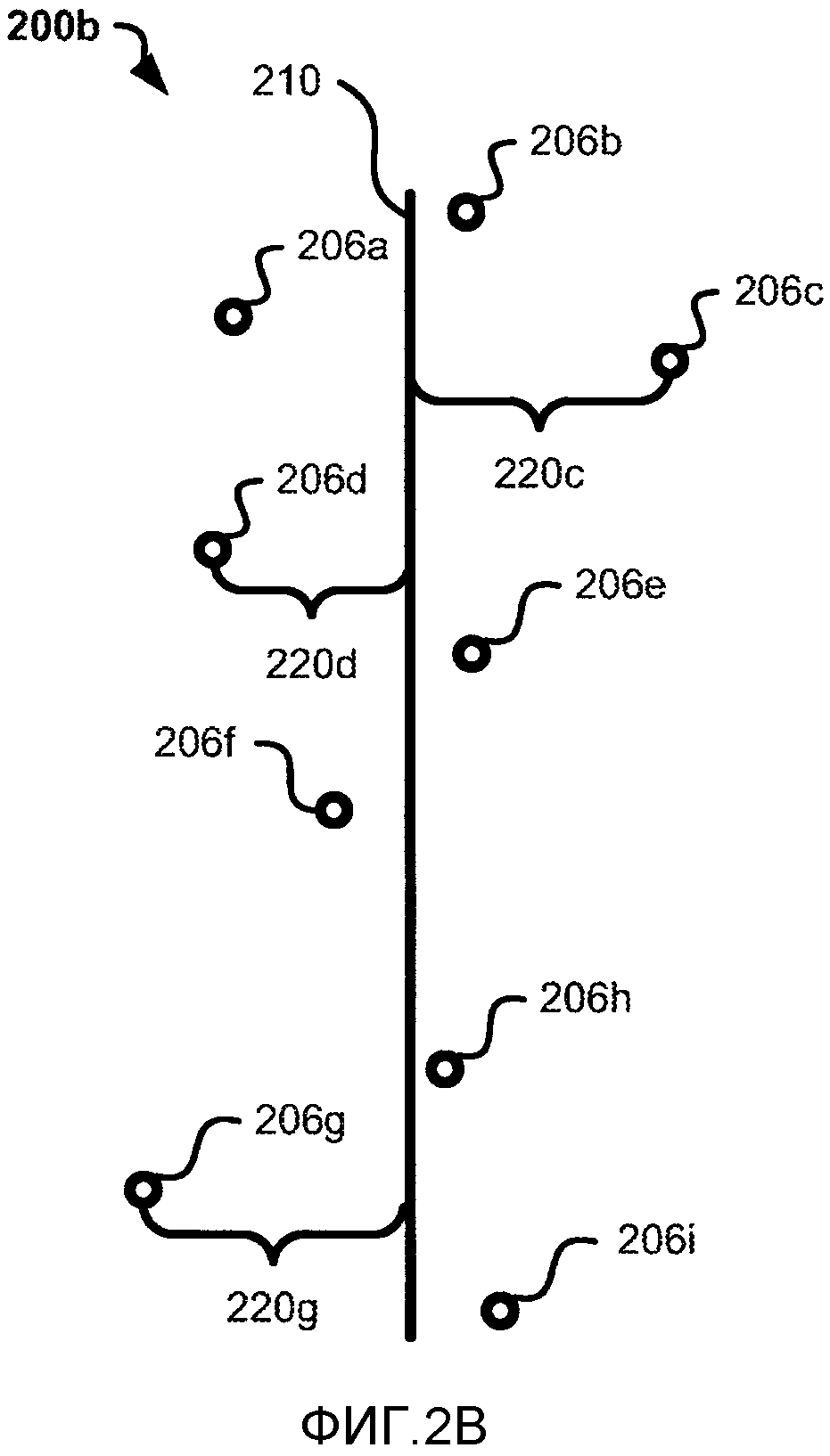
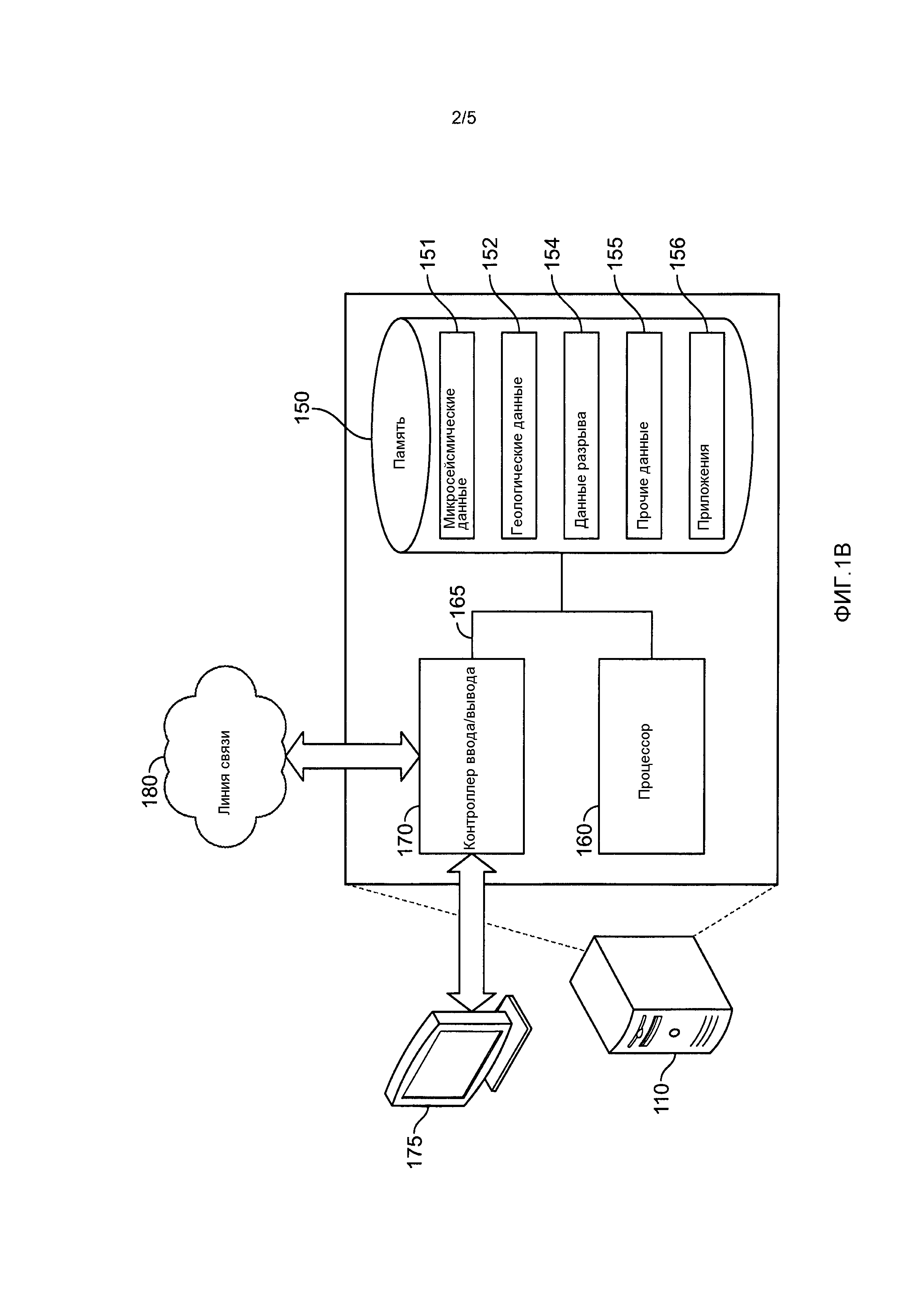
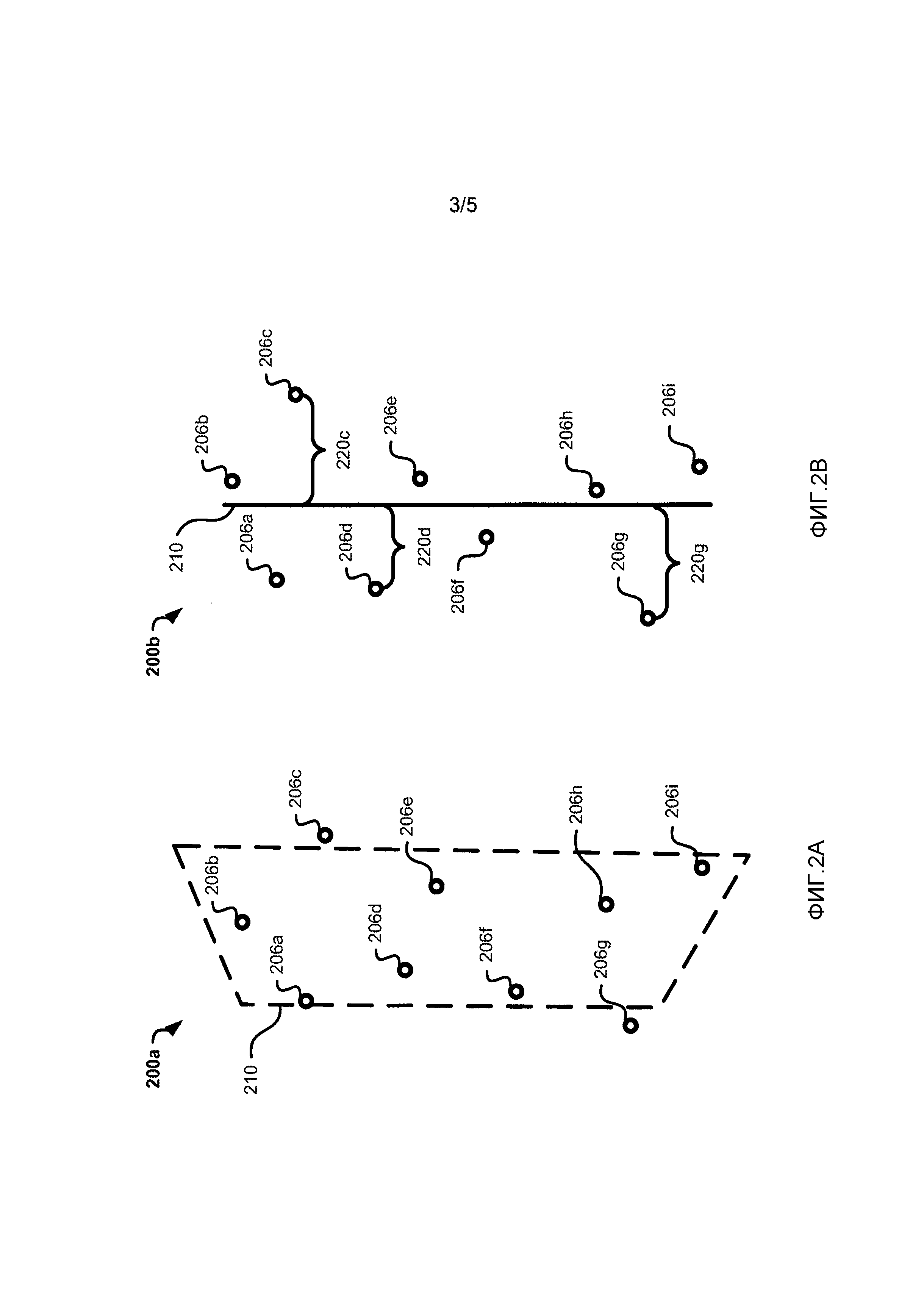
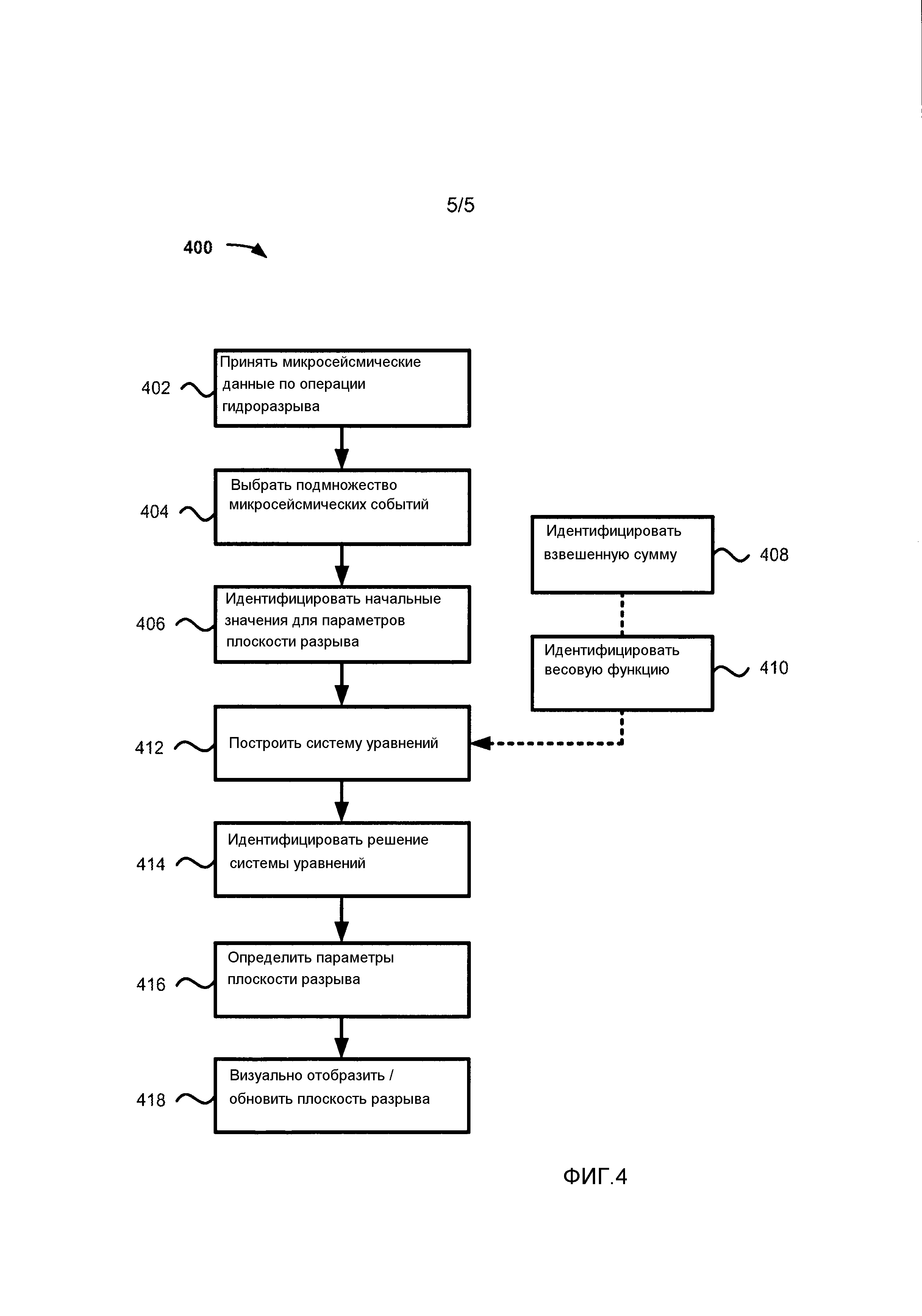
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости

