Результат интеллектуальной деятельности: СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ РАДИОЛОКАЦИОННЫХ СИСТЕМ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано для имитации радиолокационных сигналов систем радионавигации, предназначенных для управления движением летательных аппаратов.
Для обеспечения навигации летательных аппаратов (ЛА) используют радиоволны, применяемые в радиолокационных системах навигации (РСН).
Радиолокационные системы навигации представляют собой достаточно сложные радиотехнические системы [1]. Поэтому возникает задача проверки работоспособности РСН до проведения полетов с использованием ЛА. Наибольшей достоверностью обладают результаты натурных испытаний, но возможности их проведения для РСН ЛА и получение требуемого объема информации ограничены. При этом натурные испытания РСН ЛА представляют собой длительный и дорогостоящий процесс.
Наибольшее распространение получило математическое моделирование РСН. Однако для построения математического описания процессов РСН необходимо четкое представление не только о структуре, поведении отдельных элементов, но и о взаимодействии между ними с учетом действия различных факторов. Поэтому используют различные имитаторы, которые позволяют имитировать (моделировать) процессы, происходящие на борту ЛА [2].
Наиболее широко используют специальные модели, представляющие собой сочетание физической и математической модели с натурными приборами. Чрезвычайно важную роль играют такие модели при испытании радиолокационных систем навигации.
При определении характеристик отражения от поверхностей с произвольной шероховатостью используют следующий подход [3]. Экспериментально находят характеристики отражения при определенных условиях, а потом создают модель поверхности, подбирая ее структуру, чтобы результаты расчета и эксперимента совпали. Для имитации поверхности используют совокупность элементарных отражателей, размещенных на поверхности и составляющих ее поверхность, - фацетов [3]. Традиционно форма фацетов - треугольная, но в последние годы используют и полигональную, формируемую в среде современных систем автоматизированного проектирования [4].
Известен способ имитации радиолокационного сигнала РСН, реализованный в системе [5].
Способ позволяет:
- имитировать зондирующий сигнал: имитация радиосигнала, определяющего движение ЛА в пространстве по дальности с помощью СВЧ-сигнала (с использованием СВЧ-генератора);
- имитировать процесс отражения зондирующего сигнала путем изменения амплитуды СВЧ-сигнала (с использованием управляемого аттенюатора СВЧ;
- имитировать процесс определения высоты ЛА (работу радиовысотомера и действие подстилающей поверхности для учета флюктуации зондирующего сигнала, его запаздывание, дискретность формирования).
Недостатками способа [5] являются:
- чрезвычайная сложность процесса имитации и громадные размеры устройства при реализации способа, что ведет к его уникальности и единичности системы имитации;
- сочетание электрических и механических процессов имитации, что усложняет процесс имитации, поскольку механические системы имитации требуют постоянного обслуживания;
- снижение достоверности имитации зондирующего сигнала РСН, поскольку вся имитация сводится только к изменению амплитуды СВЧ-сигнала;
- отсутствие возможности изменения амплитуды каждого СВЧ-сигнала по своему закону в последовательности сигналов, число которых на практике превышает несколько тысяч;
- упрощенная имитация подстилающей поверхности, поскольку используются случайные сигналы (реализация с использованием генератора случайных сигналов), и, в конечном итоге, невозможность реализации всех типов поверхностей, указанных в [6]: поверхности четвертого типа описываются разрывными функциями;
- отсутствие возможности имитации процесса распространения зондирующего сигнала в пространстве.
Известен способ навигации летательных аппаратов [7], выбранный за прототип. Реализация способа [7] заключается в следующем.
Способ позволяет имитировать радиолокационный сигнал, используя последовательность операций, имитирующих:
- излучение зондирующего сигнала;
- распространение зондирующего сигнала по направлению к подстилающей поверхности;
- распространение сигнала по направлению от подстилающей поверхности (отражение зондирующего сигнала);
- прием отраженного от подстилающей поверхности зондирующего сигнала.
Способ [7] априори предполагает, что:
- поверхность имеет сложную, изменяющуюся во времени структуру, которая может быть охарактеризована только статистическими методами;
- рассеянная составляющая обусловлена отражением радиолокационного сигнала от большого числа либо полностью независимых, либо обладающих ограниченными корреляционными связями элементов;
- поверхность анизотропна, так как ее отражающие свойства зависят от направления прихода зондирующего сигнала;
- радиолокационный луч (зондирующий сигнал) засвечивает достаточно большую площадь подстилающей поверхности (пятно засветки имеет достаточно большие размеры).
Пространство распространения прямого (излучение зондирующего сигнала) и переизлученного (отражение зондирующего сигнала) сигналов между системой излучения и отдельным отражателем поверхности (фацетом) трактуют как элементарный канал передачи сигнала с переменными во времени параметрами, передаточная функция которого однозначно определяется в каждый текущий момент времени положением отражателя в пространстве и скоростью его относительного перемещения. Тогда пространство распространения сигнала между системой излучения (реализуется в виде антенны РСН) и всей отражающей поверхностью представляют в виде многоканальной системы, состоящей из множества элементарных каналов числом n с передаточными функциями каждого канала Ki(jω, t), где i=1, 2, 3, …, n.
На выходе этой многоканальной системы сигналы всех каналов суммируются. При этом между каналами могут существовать взаимные корреляционные связи, которые охватывают как отдельные каналы, так и группы каналов.
В общем случае, поскольку передаточная функция каждого элементарного канала Ki(jω, t) случайно изменяется во времени, то зондирующий сигнал (импульс) после прохождения элементарного канала приобретает случайную амплитуду и фазу. При суммировании таких случайных процессов формируется результирующий сигнал, который относится к случайному процессу.
Передаточную функцию Ki(jω, t) каждого элементарного канала представляют в виде

где η(t) - стационарная случайная функция, обуславливающая случайную задержку зондирующего сигнала.
Важно отметить, что число отражающих элементов (фацетов) в пятне засветки зондирующего сигнала на подстилающей поверхности и, следовательно, число элементарных каналов n велико: n→∞.
Это означает, что способ имитации в принципе не сводится к одному каналу: n≠1. Поэтому при n≡1 способ имитации теряет всякий смысл, а реализация способа даст такую достоверность имитации, при которой имитирующий сигнал уже не будет являться таковым, а будет сигналом, не имеющим никакого отношения к процессу имитации.
Отражающие элементы подстилающей поверхности считаются полностью независимыми или частично коррелированными в пространстве. Поэтому суммарный процесс является суперпозицией большого числа независимых величин или величин с ограниченными корреляционными связями.
Число элементов n подстилающей поверхности, засвеченных зондирующим сигналом, может достигать сотен и тысяч. Таким же будет и число каналов, что сделать чрезвычайно сложно при практической реализации. Поэтому значение n существенно сокращают. В простейшем случае число независимых каналов составляет менее 10, что ведет к снижению точности - достоверности имитации.
В [7] рассматривают имитацию радиолокационного сигнала на высокой частоте, промежуточной частоте (используют систему переноса по частоте вниз) и на видеочастоте. Имитация по высокой частоте связана с наибольшими трудностями и материальными затратами.
Выбор способа и частотного диапазона имитации определяется задачами исследования и типом радиолокационной системы навигации.
Вне зависимости от используемого способа и частотного диапазона имитации реализация способа имитации должна включать процесс генерации квазипериодического сигнала и генерацию детерминированных функций (для обеспечения сигналов различной формы). Причем процесс генерации квазипериодического (случайного) сигнала должен допускать возможность изменения статистических характеристик процесса в широких пределах.
В конкретных случаях, способ имитации включает процесс задержки зондирующих сигналов (реализованный в виде линий задержки) со случайной задержкой (реализованной на системах фазовой модуляции, когда в качестве сигнала модуляции используется шумоподобный сигнал, генерируемый генератором шумового сигнала).
При имитации по видеочастоте сигнал, представляющий собой импульсы постоянной амплитуды, задержанные на определенную дальность и перемещающиеся с заданной скоростью, является управляющим сигналом процесса модуляции, а входным сигналом процесса модуляции является случайный сигнал. В результате, выходным сигналом имитатора (выходной сигнал системы модуляции) будут видеоимпульсы, амплитуды которых изменяются по закону отражения сигнала от подстилающей поверхности, а их положение определяется законом изменения дальности.
Система излучения зондирующего сигнала реализована в виде передающей антенны радиолокационной станции (РЛС), отражающая поверхность реализована в виде подстилающей поверхности, над которой происходит движение ЛА, система приема отраженного сигнала реализована в виде приемной антенны РЛС.
Недостатком способа [7] являются:
- отрицательное отношение к имитации подстилающей поверхности с помощью фацетов [7]; хотя только использование фацетов позволяет имитировать наиболее сложные типы поверхностей, описываемых разрывными функциями [6], что в принципе невозможно для электродинамических моделей поверхностей;
- отсутствие возможности: изменения угла наклона зондирующего луча и использования диаграммы направленности системы приема (приемной антенны) сложной формы и ее изменения;
- отсутствие при имитации параметров движения ЛА в пространстве: вектора скорости и высоты движения, угловых положений ЛА и их изменений;
- отсутствие при имитации возможности вариации типов и параметров подстилающей поверхности;
- использование СВЧ-сигналов в имитаторах радиолокационного сигнала, что усложняет и удорожает процесс имитации;
- одновременное использование нескольких вариантов имитации сигнала: на входе системы приема, а также отдельных ее узлов (детектора, усилителя промежуточной частоты и видеотракта или на высокой частоте, промежуточной частоте и видеочастоте); при этом каждая из последующих модификаций является более полной, чем предыдущая;
- невозможность выполнения на практике условия n→∞, поскольку реальное значение n не превышает десяти.
Техническим результатом изобретения является повышение достоверности имитации радиолокационного сигнала в радиолокационных системах навигации за счет имитации совокупности факторов, определяющих параметры радиолокационного сигнала, излучающей и приемной систем, отражающей поверхности и летательного аппарата путем использования в определенной последовательности технически обоснованных функций амплитудных распределений.
Технический результат достигается тем, что в способе имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов, заключающемся в использовании процесса амплитудной модуляции, входным сигналом которого является процесс генерации сигнала с постоянной амплитудой, для управления процессом амплитудной модуляции используют в требуемой последовательности амплитудные распределения в виде: первого распределения Пирсона P1(x), второго распределения Пирсона P2(x), третьего распределения Пирсона P3(x), четвертого распределения Пирсона P4(x), пятого распределения Пирсона P5(x), шестого распределения Пирсона P6(x), седьмого распределения Пирсона P7(x), восьмого распределения Пирсона P8(x), девятого распределения Пирсона P9(x), распределения Вейбулла W(x), обратного нормального распределения G(x), первого распределения Джонсона S1(x), второго распределения Джонсона S2(x), третьего распределения Джонсона S3(x), четвертого распределения Джонсона S4(x), пятого распределения Джонсона S5(x), распределения Релея R(x) и распределения Райса Rs(x). Для установленного закона распределения варьируют совокупность значений параметров амплитудных распределений: первого начального момента х0, первого, второго, третьего и четвертого центральных моментов µ1, µ2, µ3 и µ4, коэффициентов асимметрии β1 и эксцесса β2, параметров: сдвига ξ1 и ξ2, положения ζ, масштаба γ1 и γ2, формы m1, m2 и m3.
Технический результат достигается тем, что при реализации способа имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов используют семейство функций амплитудных распределений с применением вариации совокупности значений параметров амплитудных распределений в рамках одной используемой функции, что обеспечивает такую установку интегральных параметров сигналов, имитирующих отраженные радиолокационные сигналы, которая позволяет имитировать угол наклона зондирующего сигнала и его изменения, диаграммы направленности систем излучения и приема при наличии боковых лепестков, частоту зондирующего сигнала и ее изменение, тип и параметры подстилающей поверхности и их изменения, параметры движения летательных аппаратов, включая вектор скорости, высоту движения, угловые положения и их изменения. При этом СВЧ-сигналы не используют, что влечет за собой упрощение и снижение стоимости способа имитации сигналов радиолокационных систем навигации.
Способ имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов поясняют следующие чертежи:
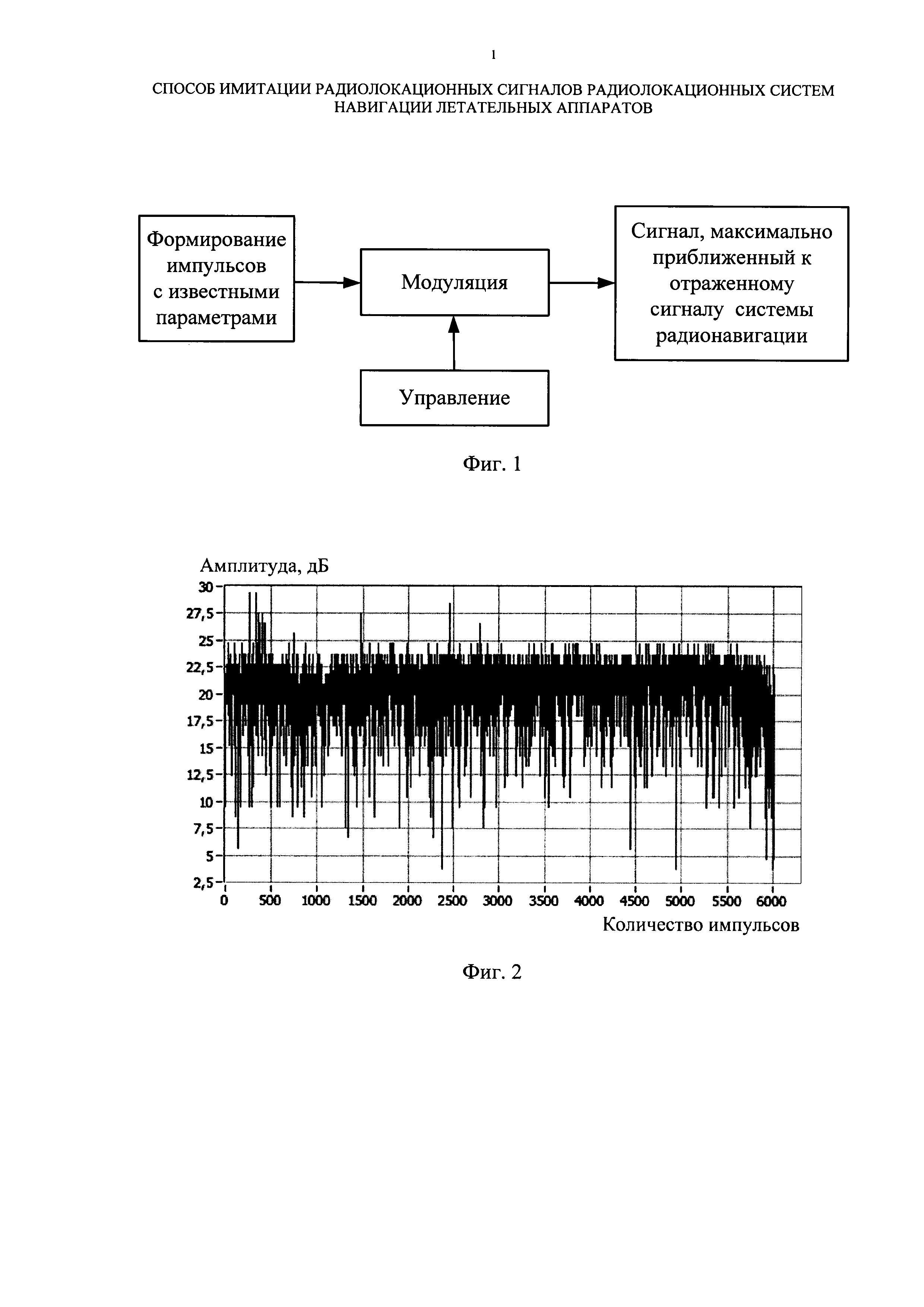
- фигура 1 - структурная схема, поясняющая процесс имитации радиолокационных сигналов систем радионавигации, предназначенных для управления движением летательных аппаратов;
- фигура 2 - значения амплитуд сигнала, отраженного от водной поверхности;
- фигура 3 - экспериментальные зависимости от нормированной высоты  следующих значений: а - первого начального момента
следующих значений: а - первого начального момента  , б - второго центрального момента от высоты
, б - второго центрального момента от высоты  , в - коэффициента асимметрии
, в - коэффициента асимметрии  , г - коэффициента эксцесса
, г - коэффициента эксцесса  ;
;
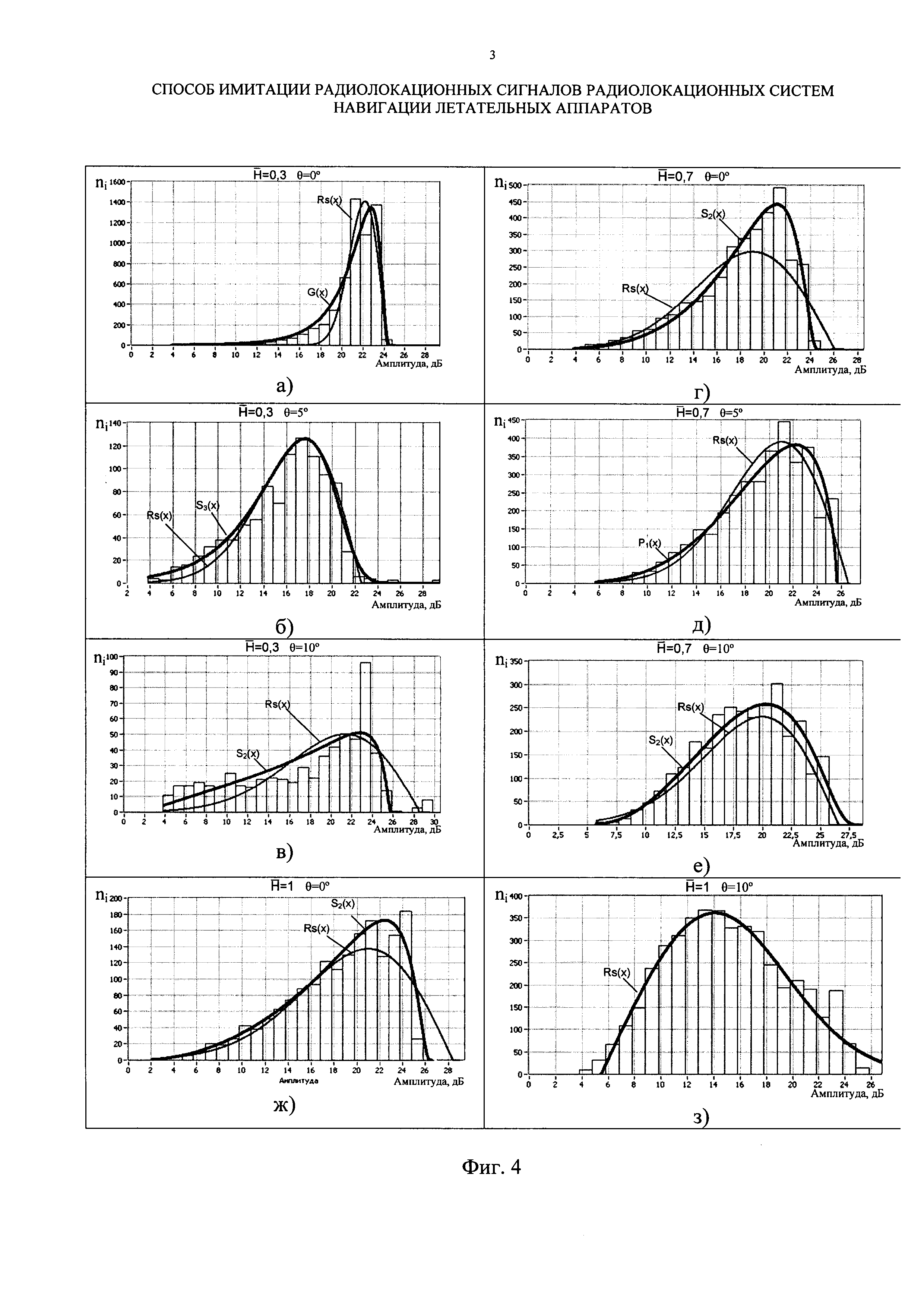
- фигура 4 - аппроксимация гистограмм амплитуд отраженных сигналов для ряда значений нормированной высоты
и угла зондирования сигналов θ следующими распределениями: а - обратного нормального распределения G(x), б - третьего распределения Джонсона S3(x), в - второго распределения Джонсона S2(x), г - второго распределения Джонсона S2(x), д - первого распределения Пирсона P1(x), е - второго распределения Джонсона S2(x), ж - второго распределения Джонсона S2(x), з - распределения Райса Rs(x), где i - количество интервалов, на которые разбивается диапазон амплитуд отраженных сигналов (размах амплитуд), n - количество отраженных сигналов (импульсов) в i-м интервале, n>>1. На всех рисунках указанные выше распределения проведены толстыми линиями, а распределение Райса Rs(x) - тонкими и приведено на каждом графике для сравнения.
Реализация способа заключается в следующем.
Способ имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов имитирует следующую последовательность процессов:
- излучение зондирующего сигнала;
- распространение зондирующего сигнала по направлению к подстилающей поверхности;
- отражение распространяющегося зондирующего сигнала от подстилающей поверхности;
- прием отраженного распространяющегося зондирующего сигнала от подстилающей поверхности.
После осуществления указанных операций принятый отраженный радиолокационный сигнал приобретает случайные интегральные параметры: амплитуду, длительность, длительность фронта и среза, задержку относительно зондирующего сигнала.
Способ обеспечивает выполнение следующих операций (фиг. 1):
- формирование импульсов с известными параметрами: постоянной амплитуды и длительностями фронтов и срезов;
- модуляцию сформированных импульсов с известными параметрами;
- управление процессом модуляции;
- формирование сигнала, с максимальной достоверностью имитирующего радиолокационный сигнал в радиолокационных системах навигации.
Реализация способа имитации радиолокационных сигналов систем радионавигации, предназначенных для управления движением летательных аппаратов, осуществляется следующим образом.
Задают исходные данные: высоту движения ЛА, тип поверхности, количество отраженных импульсов, параметры излучения зондирующих импульсов и пр.
Устанавливают тип амплитудного распределения, соответствующий исходным данным.
Управляют процессом модуляции таким образом, чтобы интегральные параметры каждого промодулированного импульса с известными параметрами обеспечивали установленный тип функции амплитудного распределения и значения ее параметров.
Процесс управления модуляцией предполагает задание каждому импульсу собственных значений интегральных параметров, как происходит на практике: интегральные параметры каждого импульса в последовательности импульсов реального отраженного сигнала имеют различные значения.
Промодулированная последовательность импульсов имитирует радиолокационный сигнал систем радионавигации, предназначенный для управления движением летательных аппаратов.
Таким образом, по заданному типу (форме и параметрам) функции амплитудного распределения производят восстановление последовательности отраженных зондирующих сигналов, интегральные параметры которых обеспечивают заданный тип распределения. Поэтому сформированные импульсы с известными параметрами, представляющие входной процесс процесса модуляции, под действием управления процессом модуляции превращаются в последовательность отраженных зондирующих импульсов.
Поскольку амплитудные распределения получены из практических последовательностей отраженных сигналов, то и на выходе процесса модуляции возникает такая же последовательность отраженных сигналов, какая была на практике.
Вариация параметров данного типа распределения обеспечивает имитацию:
- типа и параметров подстилающей поверхности и их изменения;
- угла наклона зондирующего сигнала и его изменения;
- частоты зондирующего сигнала и ее изменение;
- форму диаграмм направленности систем излучения и приема, включая наличие ряда боковых лепестков;
- параметров движения летательных аппаратов: высоты движения, вектора скорости, угловых положений и их изменения.
При имитации всех характеристик распространения радиолокационного сигнала используют только низкочастотные процессы.
Для управления процессом модуляции используют в требуемой последовательности семейство следующих функций амплитудных распределений: первое распределение Пирсона P1(x), второе распределение Пирсона P2(x), третье распределение Пирсона P3(x), четвертое распределение Пирсона P4(x), пятое распределение Пирсона P5(x), шестое распределение Пирсона P6(x), седьмое распределение Пирсона P7(x), восьмое распределение Пирсона P8(x), девятое распределение Пирсона P9(x), распределение Вейбулла W(x), обратное нормальное распределение G(x), первое распределение Джонсона S1(x), второе распределение Джонсона S2(x), третье распределение Джонсона S3(x), четвертое распределение Джонсона S4(x), пятое распределение Джонсона S5(x), распределения Релея R(x), распределения Райса Rs(x).
Для заданного вида амплитудного распределения варьируют совокупность значений параметров:
- первого начального момента x0,
- первого, второго, третьего и четвертого центральных моментов µ1, µ2, µ3 и µ4 соответственно,
- коэффициентов асимметрии β1 и эксцесса β2,
- параметры: сдвига ξ1 и ξ2, положения ζ, масштаба γ1 и γ2, формы m1, m2 и m3.
При этом, в частом случае, имеем: ξ1=ξ2=ξ, γ1=γ2=γ и m1=m2=m.
Выбранное семейство функций амплитудных распределений определяют следующим образом.
Первое распределение Пирсона P1(x) представим в виде

Здесь ξ1≤x≤ξ2, ξ2-ξ1 - размах распределения, m1+1>0, m2+1>0, B(·) - бета-функция, которая выражается через гамма-функцию Г(·) в виде зависимости B(β, β)=Г(α)Г(β)/Г(α+β).
Данное распределение может иметь асимметрию: положительную, отрицательную и нулевую, определяемую соотношениями между его параметрами формы m1>(<)(=)m2.
Второе распределение Пирсона P2(x), полученное из (2), полагая

запишем как

где B(m+1, m+1)=Г2(m+1)/Г(2m+2).
Третье распределение Пирсона Р3(x) определяют выражением

Здесь y(x)=(x-ξ)sgn c, sgn c - знак сигнум, равный единице при с=1 для левосторонней асимметрии (µ3>0) и минус единице при с=-1 для правосторонней асимметрии (µ3<0), для положительной асимметрии ξ≤x≤∞, для отрицательной асимметрии -∞≤x≤ξ, Г(m) определена для (3), γ>0.
Четвертое распределение Пирсона P4(x) имеет два вида записи:
- для положительной асимметрии при µ3>0 получим

где  , r=2(γ1-1), x0=ζ+mγ2/r,
, r=2(γ1-1), x0=ζ+mγ2/r,  ,
,  , -∞≤ζ≤∞.
, -∞≤ζ≤∞.
- для отрицательной асимметрии при µ3<0 имеем

где F(r, γ2) - параметрическая функция, которая имеет вид:
- для четных значений r

где α=γ1-1,  ,
,
- для нечетных значений r

где k=(r-1)/2.
Пятое распределение Пирсона P5(x) запишем как

где y(x)=(x-ξ)sgn c , Где -∞≤ξ≤∞.
Шестое распределение Пирсона P6(x) определяют выражением

где y(x)=(x-ξ1)sgn c , z(x)=(x-m3)sgn c , ξ1≤x≤∞, m=m2-m1-1, m2>m1+1, -∞<(m1, m2)<∞.
Седьмое распределение Пирсона P7(x) представим в виде

где -∞≤ζ≤∞, m>0,5, γ>0.
Восьмое распределение Пирсона P8(x) запишем как

где -∞≤ζ≤∞, m>0.
Девятое распределение Пирсона P9(x) определяют:
- для левосторонней асимметрии при µ3>0 как

- для правосторонней асимметрии при µ3<0 в виде

где -∞<m<∞.
Распределение Релея R(x) представим в виде

где  , γ>0, -∞<ξ<∞.
, γ>0, -∞<ξ<∞.
Распределение Райса Rs(x) имеет вид

где y(x)=(x-ξ)sgn c, I0(·) - модифицированная функция Бесселя нулевого порядка, -∞<ξ<∞, γ>0, m>0.
Распределение Вейбулла W(x) запишем как

где
, (γ, m)>0, -∞<ξ<∞.
Обратное нормальное распределение G(x) представим как

где y(x)=(x-ξ)sgn c, ξ>0.
Первое распределение Джонсона S1(x) имеет вид

где y(x)=(x-ξ)sgn c, -∞<m1<+∞, m2>0, -∞<ξ<∞.
Второе распределение Джонсона S2(x) запишем как

где  , γ>0, -∞<m1<+∞, m2>0, -∞<ξ<∞.
, γ>0, -∞<m1<+∞, m2>0, -∞<ξ<∞.
Третье распределение Джонсона S3(x) имеет вид

где y(x)=(x-ξ)/γ, γ>0, -∞<m1<+∞, m2>0, -∞<ξ<∞.
Четвертое распределение Джонсона S4(x), полученное из S2(x) при m1=0, представим как

Пятое распределение Джонсона S5(x), полученное из S3(x) при m1=0, запишем в виде

Определив вид каждого приведенного выше (2)-(24) амплитудного распределения и его параметры, можно промодулировать известную последовательность импульсов, интегральные параметры которых будут соответствовать заданному распределению. При этом последовательность импульсов будет представлять собой отраженные зондирующие импульсы (отраженный зондирующий сигнал).
Реализацию способа имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов рассмотрим на примере отражения зондирующих сигналов от водной поверхности. Угол зондирования в сигналов менялся от 0 до 10 градусов от вертикали при вертикальной поляризации, высота движения ЛА была близка к тропосферному слою. Измерения были проведены летом над поверхностью воды при скорости ветра 3,6 м/с.
На фигуре 2 представлены значения амплитуд отраженного сигнала, когда количество импульсов в последовательности составило 5700. При этом минимальное значение амплитуды отраженного сигнала равно 3,8 дБ, максимальное составляет 29,45 дБ. В дальнейшем будем использовать значения нормированной высоты  движения ЛА.
движения ЛА.
На фигуре 3 представлены экспериментальные зависимости от нормированной высоты  следующих параметров: а - первого начального момента
следующих параметров: а - первого начального момента  , б - второго центрального момента
, б - второго центрального момента  , в - коэффициента асимметрии
, в - коэффициента асимметрии  , г - коэффициента эксцесса
, г - коэффициента эксцесса  .
.
Применение обратного нормального распределения G(x) позволяет имитировать радиолокационные сигналы для относительной высоты движения ЛА, равной  , при угле зондирования, равном θ=0°. Распределение Джонсона S3(x) наилучшим образом имитирует радиолокационные сигналы для
и θ=5°. Распределение Джонсона S2(x) позволяет имитировать радиолокационные сигналы при
и θ=10°. Распределение Джонсона S2(x) подходит для имитации радиолокационных сигналов при
, при угле зондирования, равном θ=0°. Распределение Джонсона S3(x) наилучшим образом имитирует радиолокационные сигналы для
и θ=5°. Распределение Джонсона S2(x) позволяет имитировать радиолокационные сигналы при
и θ=10°. Распределение Джонсона S2(x) подходит для имитации радиолокационных сигналов при  и θ=0°. Распределение Пирсона P1(x) наилучшим образом имитирует радиолокационные сигналы для
и θ=0°. Распределение Пирсона P1(x) наилучшим образом имитирует радиолокационные сигналы для  и θ=5°. Распределение Джонсона S2(x) подходит также и для имитации радиолокационных сигналов при
и θ=10°. Распределение Джонсона S2(x) может успешно имитировать радиолокационные сигналы при
и θ=5°. Распределение Джонсона S2(x) подходит также и для имитации радиолокационных сигналов при
и θ=10°. Распределение Джонсона S2(x) может успешно имитировать радиолокационные сигналы при  и θ=0°. Распределение Райса Rs(x) позволяет имитировать радиолокационные сигналы для
и θ=0°. Распределение Райса Rs(x) позволяет имитировать радиолокационные сигналы для  и θ=10°. Использование распределения Джонсона S2(x) в нескольких случаях возможно для имитации радиолокационных сигналов при различных параметрах самой функции распределения.
и θ=10°. Использование распределения Джонсона S2(x) в нескольких случаях возможно для имитации радиолокационных сигналов при различных параметрах самой функции распределения.
Сказанное поясняет фигура 4, на которой показаны аппроксимации гистограмм амплитуд отраженных сигналов для ряда значений  и θ следующими распределениями: а - G(x), б - S3(x), в - S2(x), r - S2(x), д - P1(x), е - S2(x), ж - S2(x), з - Rs(x).
и θ следующими распределениями: а - G(x), б - S3(x), в - S2(x), r - S2(x), д - P1(x), е - S2(x), ж - S2(x), з - Rs(x).
Характерно, что в литературе часто используют распределение Райса Rs(x), как правило, без обоснования применения. В данном случае распределение Rs(x) тоже присутствует, но, в основном, для сравнения его с выбранным семейством функций распределения. Результаты представлены на фигуре 4, на которой хорошо видна разница между распределением Райса и семейством функций распределения, выбранным исходя из практических результатов. На всех графиках фигуры 4 указанное выше семейство функций распределения нарисовано толстыми линиями, а распределение Райса Rs(x) - тонкими линиями.
Можно определить другой ряд функций амплитудных распределений, аналогичные показанным на фигуре 4, при комбинации других параметров зондирующих сигналов, подстилающей поверхности и ЛА для имитации радиолокационных сигналов систем радионавигации.
Важно отметить, что для достижения конечного результата способ не предполагает использование процесса формирования СВЧ-импульсов с известными параметрами, действующего на входе процесса модуляции. Отказ от использования СВЧ-сигналов позволяет существенно упростить способ имитации сигналов радиолокационных систем навигации при его реализации, одновременно снижая стоимость устройств системы имитации.
Отметим, что в настоящее время известно свыше пятидесяти функций распределения, однако для аппроксимации амплитудных распределений отраженных сигналов предпочтительнее использовать рассмотренное семейство функций амплитудных распределений, поскольку оно наилучшим образом обеспечивает решение поставленной задачи. При этом строгое математическое определение конкретного распределения (2)-(24) позволяет избежать путаницы, поскольку возможно, что одно название может подразумевать разный вид распределения.
Таким образом, предложенный способ имитации радиолокационных сигналов систем радионавигации, предназначенных для управления движением летательных аппаратов, позволяет провести детальное имитирование радиолокационного сигнала для самых разных значений параметров процессов излучения, распространения и приема сигнала при различных параметрах отражающей поверхности и движения летательных аппаратов.
Данный способ имитации позволяет адаптировать под заданный закон амплитудного распределения известную последовательность импульсов. Поскольку процесс имитации исходит из необходимости обеспечения повышения достоверности имитации радиолокационного сигнала, то имитируемый сигнал в наибольшей степени соответствует реальному сигналу, поскольку процесс имитации включает совокупность факторов, оказывающих решающее влияние на параметры радиолокационных сигналов систем радионавигации летательных аппаратов.
ЛИТЕРАТУРА
1. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий / Под ред. М.Н. Красилыцикова, Г.Г. Серебрякова. - М.: Физматлит, 2005. - 280 С. (С. 23-35).
2. Веников В.А. Теория подобия и моделирования. - М.: Высш. школа, 1966. - 487 С.
3. Зубкович С.Г. Статистические характеристики радиосигналов, отраженных от земной поверхности. - М.: Сов. радио, 1968. - 224 С. (С. 96-97).
4. Борзов А.Б., Быстрое Р.П., Засовин Э.А. и др. Миллиметровая радиолокация: методы обнаружения и наведения в условиях естественных и организованных помех. - М.: Радиотехника, 2010. - 376 С. (С. 136).
5. Патент №2163387 РФ, МПК G05D 1/08, G09D 9/00. Система для прогнозирования результатов натурных испытаний беспилотного летательного аппарата / Никольцев В.А., Коржавин Г.А., Подоплекин Ю.Ф. и др. // Ретроспективный комплект описаний изобретений за 2001 г. на DVD.
6. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысотометрии. - М.: Сов. радио, 1979. - 320 С. (С. 22).
7. Тверской Г.Н., Терентьев Г.К., Харченко И.П. Имитаторы эхо-сигналов судовых радиолокационных станций. - Л.: Судостроение, 1973. - 224 С. (С. 30, 33-34, 40, 40-44, 142-144, 169) (прототип).
Способ имитации радиолокационных сигналов радиолокационных систем навигации летательных аппаратов, заключающийся в использовании процесса амплитудной модуляции, входным сигналом которого является процесс генерации сигнала с постоянной амплитудой, отличающийся тем, что для управления процессом амплитудной модуляции используют в требуемой последовательности амплитудные распределения в виде: первого распределения Пирсона Р(х), второго распределения Пирсона Р(х), третьего распределения Пирсона Р(х), четвертого распределения Пирсона Р(х), пятого распределения Пирсона Р(х), шестого распределения Пирсона Р(х), седьмого распределения Пирсона Р(х), восьмого распределения Пирсона Р(х), девятого распределения Пирсона Р(х), распределения Вейбулла W(x), обратного нормального распределения G(x), первого распределения Джонсона S(x), второго распределения Джонсона S(x), третьего распределения Джонсона S(x), четвертого распределения Джонсона S(x), пятого распределения Джонсона S(x), распределения Релея R(x) и распределения Райса Rs (x), для установленного закона распределения варьируют совокупность значений параметров амплитудных распределений: первого начального момента х, первого, второго, третьего и четвертого центральных моментов µ, µ, µ и µ соответственно, коэффициентов асимметрии β и эксцесса β, параметров: сдвига ξ и ξ положения ζ и масштаба γ и γ, параметров формы m, m и m.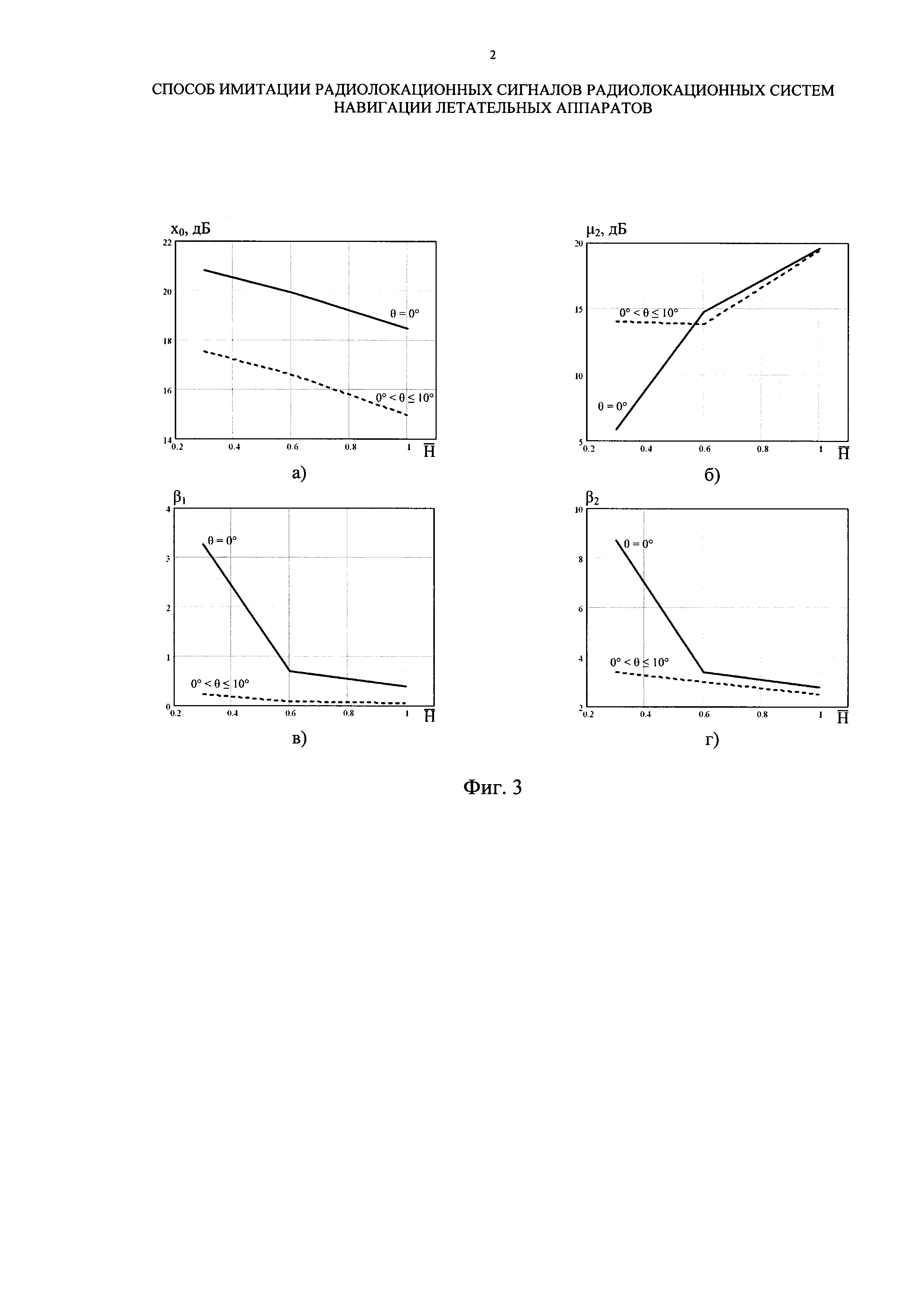
Устройство для крепления модуля бланкета на вакуумном корпусе термоядерного реактора
Электроизоляционный заливочно-пропиточный компаунд
Дифференциальный измерительный преобразователь
Высокотемпературный гафнийсодержащий сплав на основе титана
Способ изготовления плоских изделий из гафнийсодержащего сплава на основе титана
Способ получения слитков сплава на основе титана
Способ удаления углеродсодержащих слоев и пыли из вакуумных камер плазменных установок
Полностью оптический логический базис на основе микрокольцевого резонатора
Устройство для определения объёмов замкнутых полостей
Способ динамического управления техническими средствами
Способ навигации движущихся объектов
Способ определения дальности до поверхности земли
Способ радиолокации с изменением несущей частоты от импульса к импульсу

