Результат интеллектуальной деятельности: МОБИЛЬНЫЙ РОБОТ С МАГНИТНЫМИ ДВИЖИТЕЛЯМИ
Вид РИД
Изобретение
Изобретение относится к самоходным устройствам, приспособленным для перемещения по наклонным и вертикальным поверхностям, в частности к самоходным транспортным средствам для перемещения различного технологического оборудования по ферромагнитным поверхностям любой пространственной ориентации и его применения по месту назначения для выполнения различных работ.
Известен мобильный робот магнитного взаимодействия (патент РФ №2481997 от 29.09.2008, МПК B62D 57/024), который содержит раму, оснащенную колесами для перемещения по опорной поверхности с высокой магнитной проницаемостью и одним постоянным магнитом, способным магнитно взаимодействовать с указанной поверхностью для сцепления устройства с поверхностью. Магнит установлен таким образом, чтобы скользить вдоль опорной поверхности. Магнит размещен в опоре, способной свободно качаться, таким образом, что полюс магнита всегда находится в положении минимального расстояния от опорной поверхности, где каждая опора посажена таким образом, чтобы качаться на вращающемся валу колес. Достигается возможность свободного движения со скольжением по поверхности, подлежащей контролю.
Недостатком данного устройства является невозможность перемещения по поверхностям, обладающим сложной геометрией, таким как выпуклые и вогнутые изгибы продольного профиля поверхности, радиус кривизны которых сравним с размерами устройства, внутренние и внешние поверхности труб малого диаметра, сравнимого с размерами устройства, ступенчатые участки, высота которых сравнима с размерами устройства.
Также известен мобильный инспекционный робот (патент США №7958955 от 14.06.2011, МПК B62D 51/06), который содержит по меньшей мере два магнитных колеса или гусеницы или по меньшей мере две магнитных ноги для продвижения устройства вдоль инспектируемой поверхности. В соответствии с изобретением, устройство включает в себя активные вращающиеся рычаги, присоединенные к колесу, гусенице или ноге устройства. Каждый поворотный рычаг имеет длину, превышающую кратчайшее расстояние между точкой крепления поворотного рычага к устройству и поверхностью. Когда устройство находится в положении, где есть магнитный контакт с поверхностью в двух или более точках, и устройство уже не в состоянии продвинуться из-за магнитных сил, вращающиеся рычаги приводятся в немагнитный контакт с поверхностью, чтобы создать воздушный зазор между поверхностью и магнитным колесом и тем самым уменьшить магнитные силы. Таким образом, устройство способно преодолеть магнитные силы и продолжить движение вдоль поверхности.
Недостатком данного устройства является сложность перемещения в узких пространствах, вдоль труб малого диаметра по внутренней и внешней поверхностям, вдоль сложных поверхностей с продольными и поперечными препятствиями, вызванная шириной отрывного механизма и невозможностью его срабатывания при движении по описанным видам поверхностей.
В качестве ближайшего аналога выбран мобильный робот, приспособленный для свободного перемещения в трех измерениях и вверх по вертикальными стенкам с помощью магнитной силы (патент США №5220869 от 22.06.1993, МПК В61С 15/04), содержащий корпус с установленным на нем по крайней мере одним колесом и приводной узел, установленный на корпусе для приведения в движение по крайней мере одного из колес; где по крайней мере одно колесо содержит внешний барабан, имеющий кольцевую периферийную стенку, и внутренний элемент колеса, включающий в себя фрагмент из магнитно-проницаемого материала и магнит, находящийся в контакте с магнитно-проницаемым материалом; где внутренний элемент колеса имеет внешний диаметр меньший, чем внутренний диаметр внешнего барабана.
Недостатком данного устройства является невысокая мобильность в некоторых рабочих положениях, обусловленная конструкцией внутреннего элемента колеса. В верхнем положении относительно рабочей поверхности магнит создает силу сцепления, лишь незначительно меньшую, чем сила сцепления, создаваемая магнитом в нижнем положении, поскольку магнитный контур охватывает рабочую поверхность через боковые стенки колеса. Таким образом, при наличии магнитного контакта колеса с рабочей поверхностью в нескольких точках, магнитная сила сцепления в разных точках будет лишь незначительно различаться, что может затруднить отрыв колеса, когда это необходимо, и, в частности, препятствовать дальнейшему движению устройства.
Задача изобретения заключается в повышении мобильности устройства, а именно в обеспечении возможности перемещения по горизонтальным, наклонным и вертикальным ферромагнитным поверхностям, обладающим сложной геометрией, таким как выпуклые и вогнутые изгибы продольного профиля поверхности произвольного радиуса кривизны, внутренние и внешние поверхности труб малого диаметра, сравнимого с размерами устройства, ступенчатые участки произвольной высоты, а также всевозможные сочетания указанных признаков.
Техническим результатом изобретения является повышение магнитной силы сцепления колеса с рабочей поверхностью в точке касания, наиболее близкой к положению магнита, и снижение паразитных сил сцепления, возникающих в других точках касания.
Поставленная задача решается, а технический результат достигается тем, что в мобильном роботе, содержащем корпус с установленным на нем по крайней мере одним колесом и приводной узел, установленный на корпусе для приведения в движение по крайней мере одного из колес, где по крайней мере одно колесо содержит внешний барабан, имеющий кольцевую периферийную стенку, и внутренний элемент колеса, включающий в себя фрагмент из магнитно-проницаемого материала и магнит, находящийся в контакте с магнитно-проницаемым материалом, где внутренний элемент колеса имеет внешний диаметр меньший, чем внутренний диаметр внешнего барабана, согласно изобретению внутренний элемент колеса имеет форму диска с вырезами, причем постоянный магнит и фрагмент магнитно-проницаемого материала выполнены в форме полуколец с вырезами, закрепленных на приводном валу, так что при нахождении магнита на максимальном удалении от точки контакта колеса с рабочей поверхностью, большая часть линий магнитного поля проходит не через рабочую поверхность, а через магнитно-проницаемый материал внутреннего элемента колеса.
Кроме того, согласно изобретению, внутренний элемент колеса может быть расположен соосно с внешним барабаном с возможностью независимого вращения.
Кроме того, согласно изобретению, корпус устройства может представлять собой один или несколько модулей, подвижно соединенных между собой при помощи поворотных механизмов.
Кроме того, согласно изобретению, одна или несколько степеней свободы поворотного механизма могут быть активными.
Кроме того, согласно изобретению, поверхности колес, соприкасающиеся с рабочей поверхностью, могут быть покрыты слоем защитного материала.
Существо изобретения поясняется чертежами
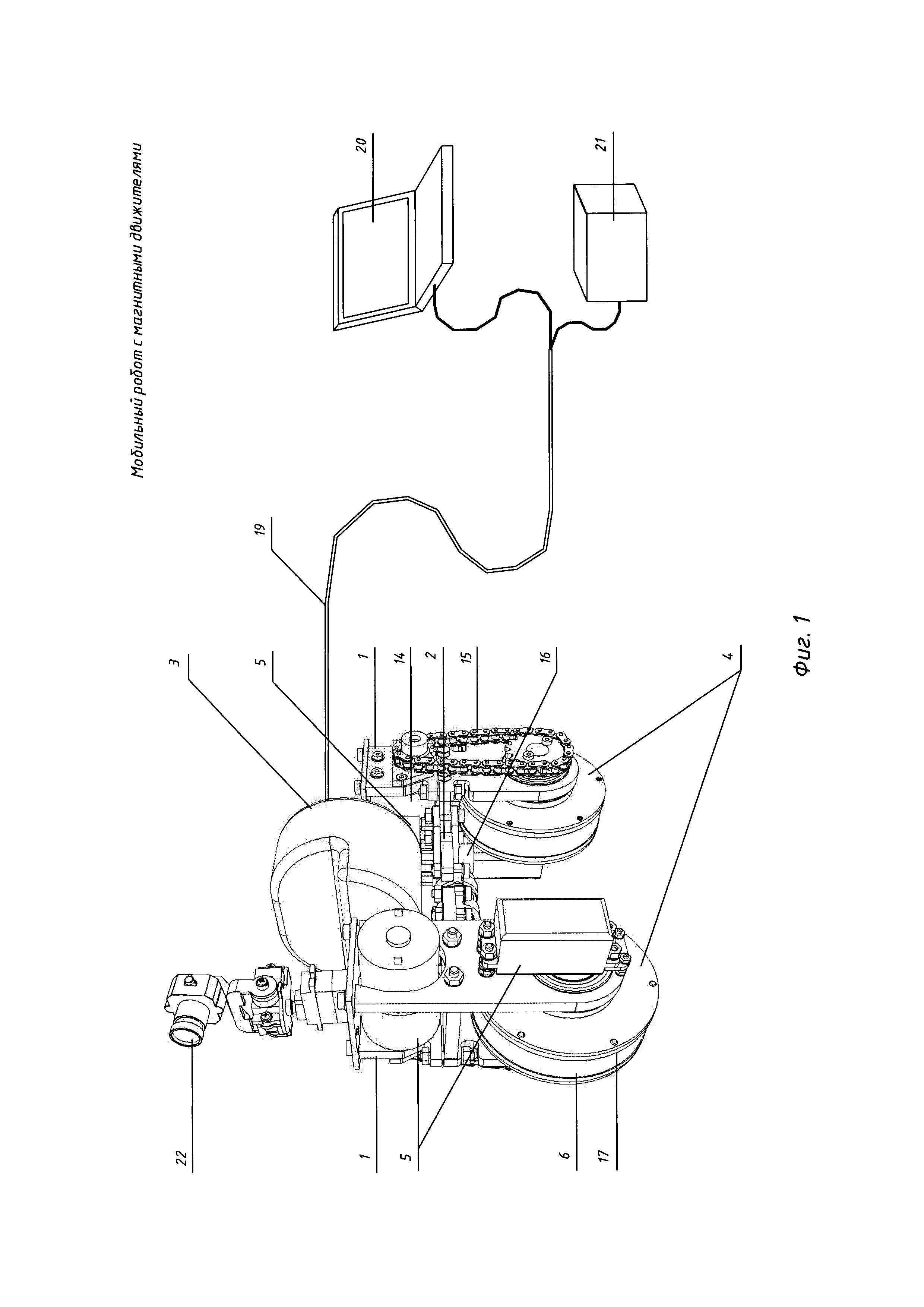
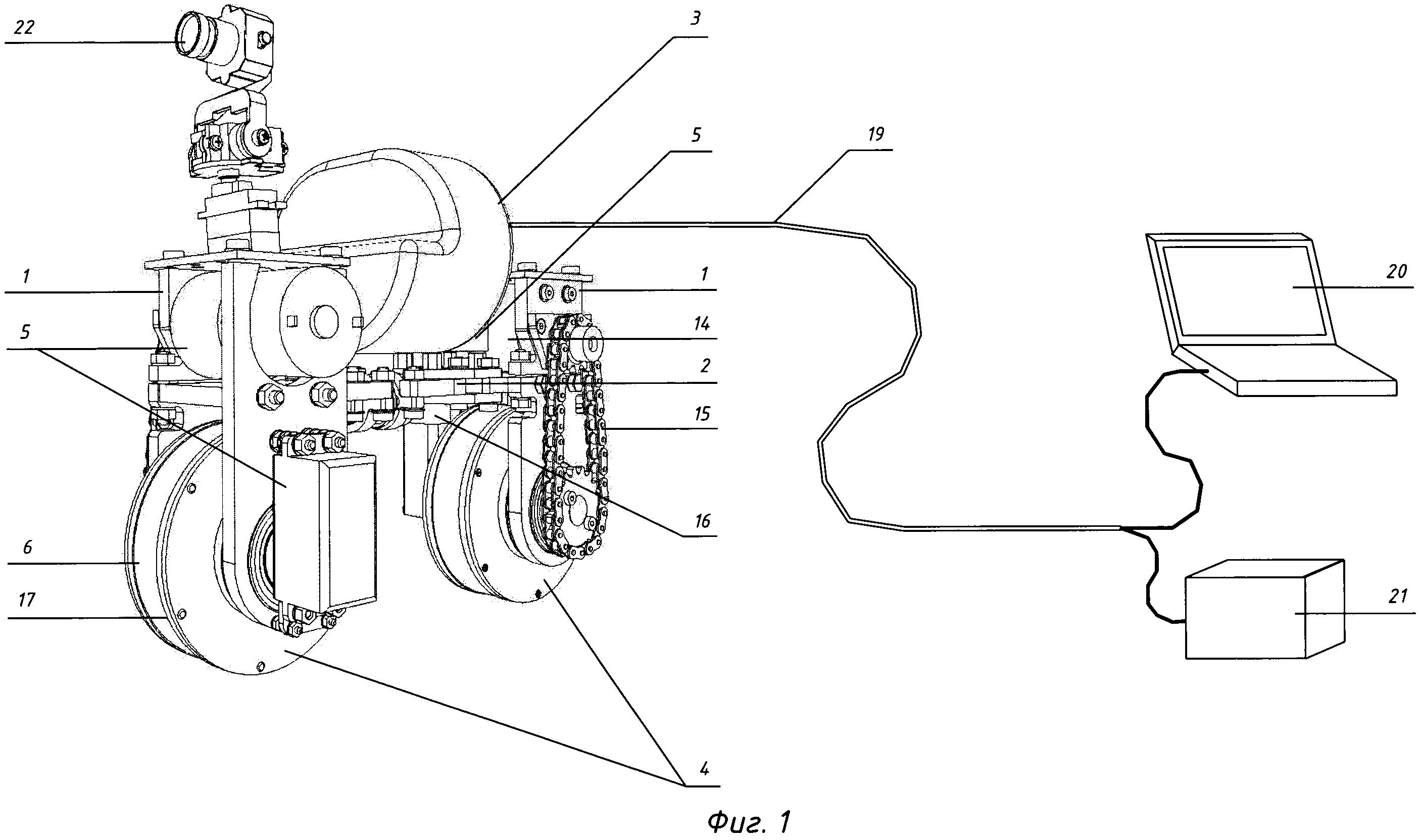
На фиг. 1 показан общий вид устройства, подготовленного к работе.
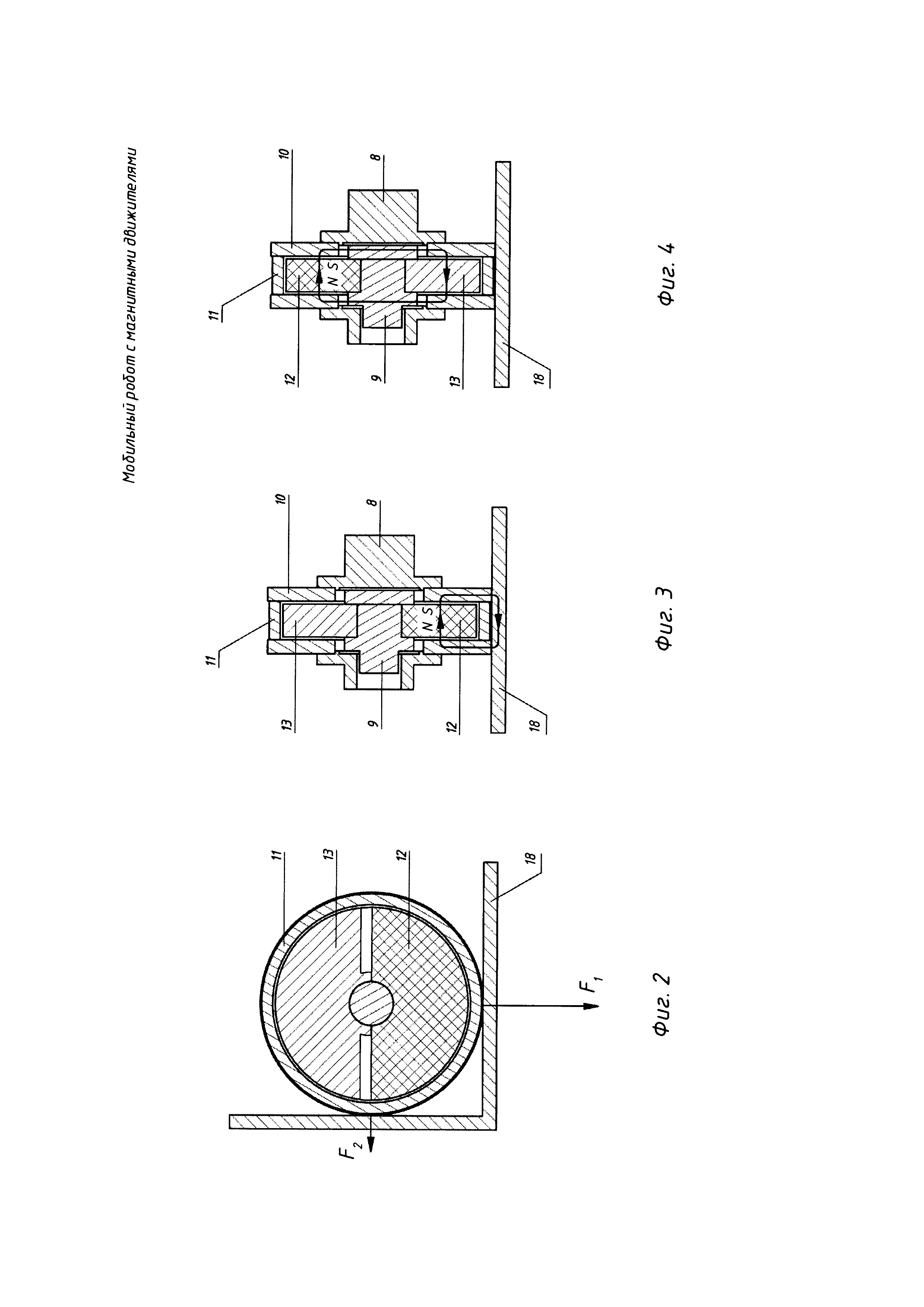
На фиг. 2 показан разрез колеса с внутренним элементом, содержащим постоянный магнит и фрагмент магнитно-проницаемого материала (вид сбоку).
На фиг. 3 показан разрез колеса с внутренним элементом, содержащим постоянный магнит и фрагмент магнитно-проницаемого материала, где магнит находится в нижнем положении (вид спереди).
На фиг. 4 показан разрез колеса с внутренним элементом, содержащим постоянный магнит и фрагмент магнитно-проницаемого материала, где магнит находится в верхнем положении (вид спереди).
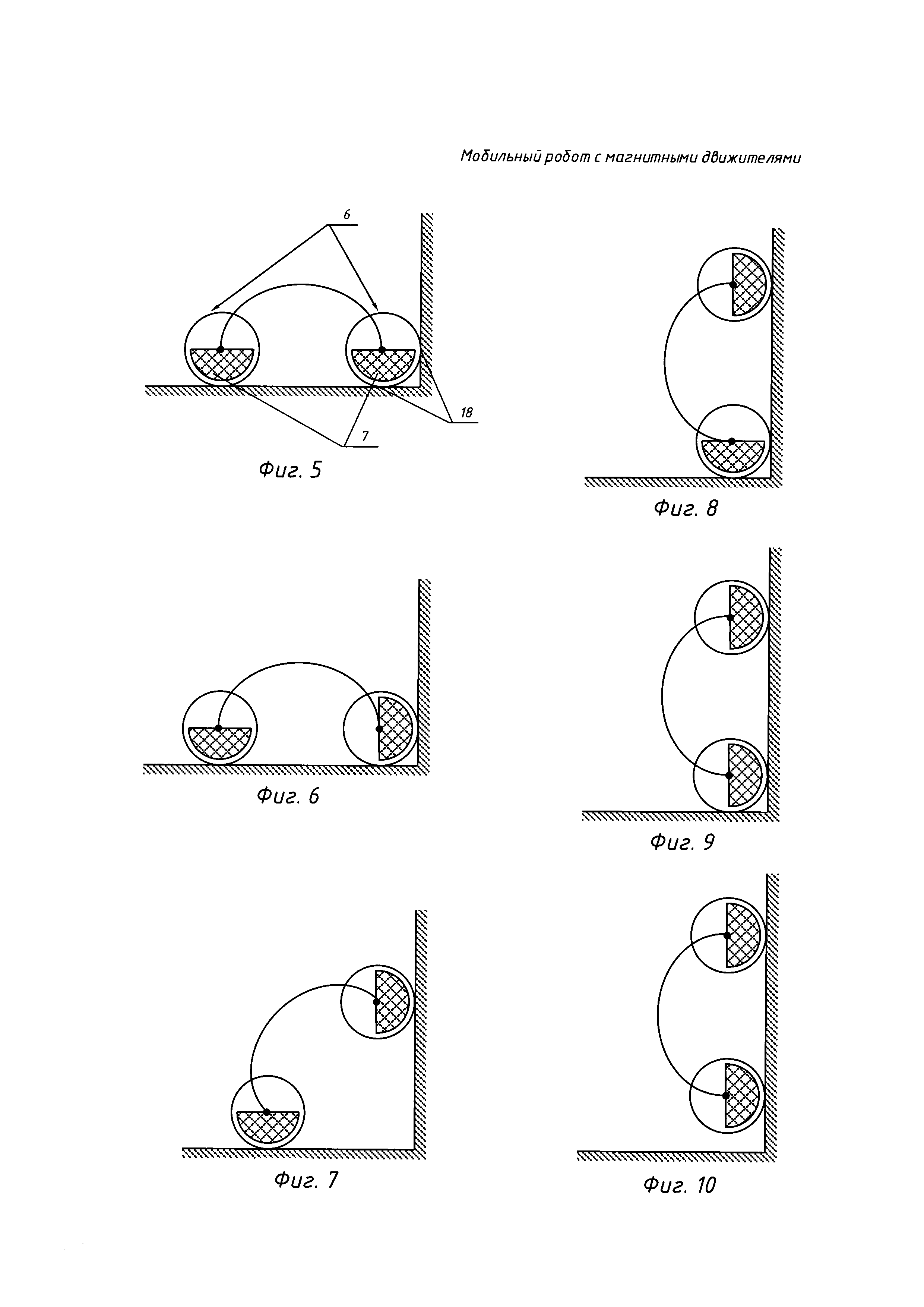
На фиг. 5-10 показана схема преодоления устройством участка стыка двух ферромагнитных поверхностей, расположенных под углом 90° друг к другу.
На фиг. 5 показано устройство в положении, при котором одно из ведущих колес находится в контакте с обеими поверхностями.
На фиг. 6 показано устройство в положении, при котором магнитная сила сцепления первого колеса с преодолеваемой поверхностью достаточна для продолжения движения.
На фиг. 7 показано устройство, продолжающее движение по преодолеваемой поверхности.
На фиг. 8 показано устройство в положении, при котором второе ведущее колесо находится в контакте с обеими поверхностями.
На фиг. 9 показано устройство в положении, при котором магнитная сила сцепления второго колеса с преодолеваемой поверхностью достаточна для продолжения движения.
На фиг. 10 показано устройство, продолжающее движение по преодолеваемой поверхности.
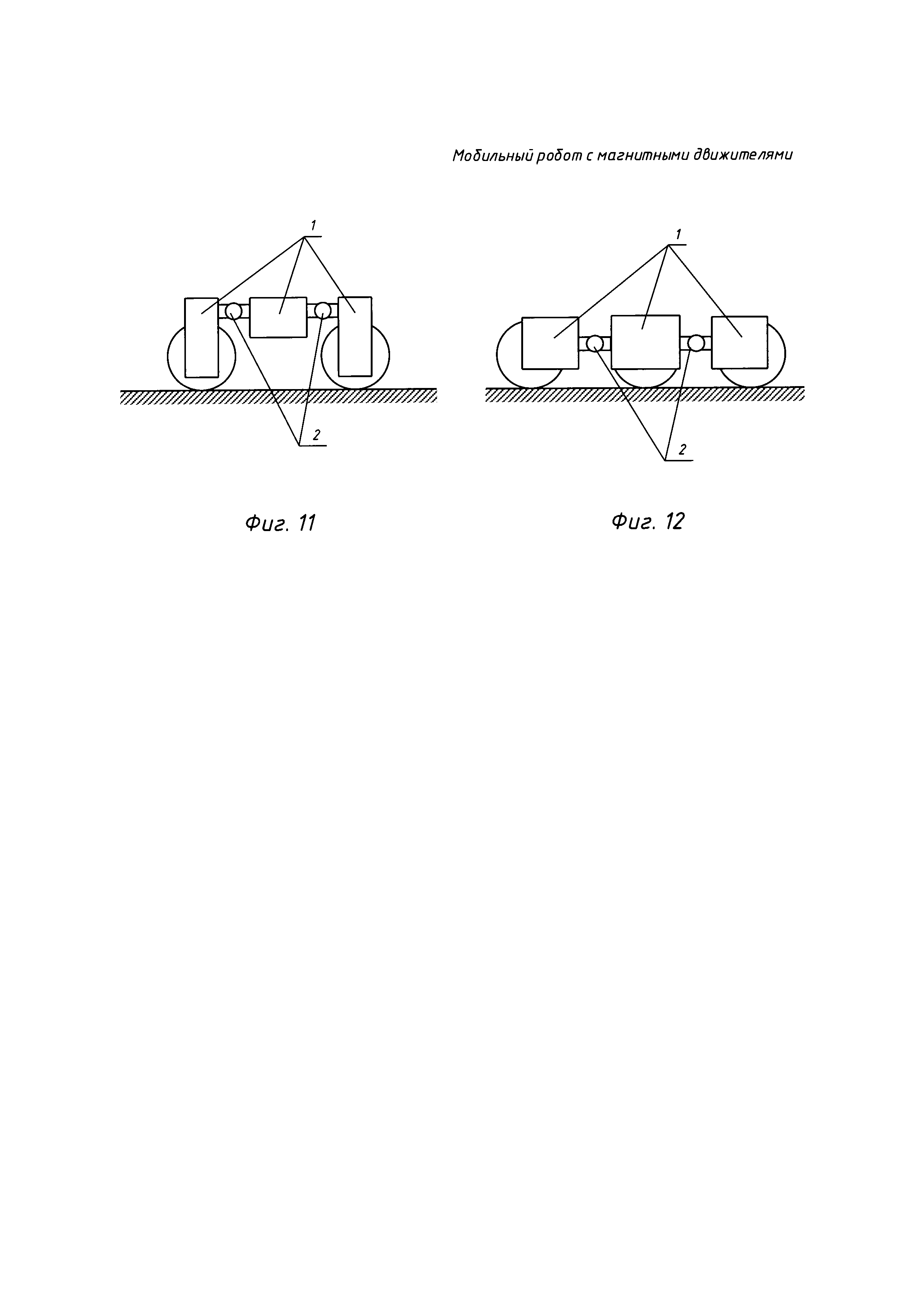
На фиг. 11 показан общий вид предлагаемого устройства в варианте осуществления с двумя активными колесными модулями и одним пассивным модулем, не оснащенным колесами.
На фиг. 12 показан общий вид предлагаемого устройства в варианте осуществления с тремя активными колесными модулями.
Предложенное устройство содержит один или несколько модулей 1, подвижно соединенных между собой при помощи поворотных механизмов 2, блок управления 3, установленный на одном из модулей, одно или несколько ведущих колес 4, несколько приводных узлов 5. Приводные узлы позволяют приводить в движение внешние барабаны 6 колес, внутренние элементы 7 колес и поворотные механизмы 2.
Одно или несколько ведущих колес содержат внешний барабан 6, приводной вал внешнего барабана 8, внутренний элемент 7, приводной вал внутреннего элемента 9. Внешний барабан 6 и внутренний элемент 7 расположены соосно таким образом, что могут вращаться независимо друг от друга.
Внешний барабан 6 колеса содержит боковые стенки 10 и кольцевую периферийную стенку 11, образующие полый цилиндр.
Внутренний элемент 7 колеса имеет диаметр меньший, чем внутренний диаметр внешнего барабана, расположен внутри внешнего барабана, имеет форму диска с вырезами, содержит постоянный магнит 12 и фрагмент магнитно-проницаемого материала 13, закрепленные на приводном валу 9 внутреннего элемента 7.
Каждый приводной узел 5 содержит электродвигатель 14 и механическую передачу 15, передающую крутящий момент от электродвигателя к приводному валу.
Каждый поворотный механизм содержит один или несколько шарниров 16, обеспечивающих соединяемым модулям 1 одну или несколько степеней свободы относительно друг друга. При этом одна или несколько степеней свободы могут быть активными. В этом случае поворотный механизм содержит один или несколько приводных узлов 5, установленных на соединяемых модулях.
Поверхности колес, соприкасающиеся с рабочей поверхностью, могут быть покрыты слоем защитного материала 17, такого как, например, маслобензостойкая резина.
Перед началом работы устройство помещают на рабочую поверхность 18. С помощью кабеля 19 устройство подключают к пульту управления 20 и к источнику питания 21. Когда устройство включено, пульт управления может использоваться для управления движением устройства и для отображения, анализа и обработки информации, получаемой с датчиков 22, установленных на устройстве.
Предложенное устройство работает следующим образом. Перед началом движения с пульта управления 20 подают команды приведения внутренних элементов 7 колес 4 в рабочее положение, в соответствии с которыми блок управления 3, установленный на устройстве, подает напряжение на электродвигатели 14 приводных узлов 5 внутренних элементов 7. Посредством механической передачи 15 крутящий момент электродвигателей 14 передается на приводные валы 9 внутренних элементов 7, что приводит к повороту внутренних элементов 7 вокруг оси. Когда внутренние элементы 7 установлены таким образом, что магнитная сила сцепления колес с рабочей поверхностью 18 достаточна для осуществления движения, с пульта 20 подают команды выключения электродвигателей 14.
Для перемещения устройства по рабочей поверхности 18 с пульта 20 подают команду движения, в соответствии с которой блок управления 3 подает напряжение на электродвигатели 14 приводных узлов 5 внешних барабанов 6 колес. Посредством механической передачи 15 крутящий момент электродвигателей 14 передается на приводные валы 8 внешних барабанов 6 колес, что приводит к вращению внешних барабанов 6 и движению устройства по рабочей поверхности 18. Чтобы прекратить движение, с пульта 20 подают команду останова, в соответствии с которой блок управления 3 отключает электродвигатели 14 приводных узлов 5 внешних барабанов 6 колес.
Для совершения устройством поворота во время движения с пульта 20 подают команду поворота на желаемый угол (в пределах заданных ограничений), в соответствии с которой блок управления 3 подает напряжение на электродвигатель 14 приводного узла 5 поворотного механизма 2. Посредством механической передачи крутящий момент электродвигателя 14 передается на шарнир 16 поворотного механизма 2, что приводит к повороту модулей 1 устройства относительно друг друга на угол, близкий к желаемому.
Когда возникает необходимость движения устройства по поверхностям, кривизна которых различна по направлениям желаемого перемещения, например при продольном и окружном перемещении по внутренней или внешней поверхности трубопровода, а также при движении по неровной поверхности, пассивный шарнир 16 поворотного механизма 2 позволяет модулям 1 устройства поворачиваться на произвольный угол (в пределах заданных ограничений) вокруг продольной оси относительно друг друга.
На фиг. 5-10 показана схема преодоления устройством участка стыка двух ферромагнитных поверхностей 18, расположенных под углом 90° друг к другу. Устройство приводят в такое положение, при котором одно из колес 4 находится в контакте с обеими поверхностями 18 (фиг. 5). Затем с пульта 20 подают команду поворота внутреннего элемента 7 на такой угол, при котором магнитная сила сцепления колеса 4 с преодолеваемой поверхностью 18 достаточна для продолжения движения (фиг. 6). Затем подают команды продолжения движения (фиг. 7) до тех пор, пока второе колесо 4 не окажется в контакте с обеими поверхностями 18, при этом поддерживают такое положение внутреннего элемента 7 первого колеса 4, чтобы магнитная сила сцепления первого колеса 4 с поверхностью 18 оставалась достаточной для продолжения движения (фиг. 8). Затем с пульта 20 подают команду поворота второго внутреннего элемента 7 на такой угол, при котором магнитная сила сцепления второго колеса 4 с преодолеваемой поверхностью 18 достаточна для продолжения движения (фиг. 9). Затем подают команду продолжения движения, при этом устройство продолжает движение по преодолеваемой поверхности 18 (фиг. 10).
Итак, заявленное изобретение позволяет достичь повышенной мобильности устройства, а именно обеспечить возможность перемещения по горизонтальным, наклонным и вертикальным ферромагнитным поверхностям, обладающим сложной геометрией, таким как выпуклые и вогнутые изгибы продольного профиля поверхности произвольного радиуса кривизны, внутренние и внешние поверхности труб малого диаметра, сравнимого с размерами устройства, ступенчатые участки произвольной высоты, а также всевозможные сочетания указанных признаков.
Автономное внутритрубное транспортное устройство
Гироскопическое устройство
Способ реабилитации и социализации учащихся с инвалидностью и ограниченными возможностями здоровья в условиях инклюзивного профессионального образования
Способ оперативной диагностики модулей металлообрабатывающих станков
Автономное внутритрубное транспортное устройство
Гироскопическое устройство
Способ реабилитации и социализации учащихся с инвалидностью и ограниченными возможностями здоровья в условиях инклюзивного профессионального образования
Способ оперативной диагностики модулей металлообрабатывающих станков
Система автоматического управления скоростью снаряда электромагнитным ускорителем

