Результат интеллектуальной деятельности: СПОСОБ РЕГУЛИРОВАНИЯ
Вид РИД
Изобретение
Изобретение относится к способу регулирования автоматической системы, в частности может быть применено к устройству для регулирования напряжения статора генератора переменного тока.
Генераторы переменного тока, особенно большой мощности (несколько сотен мегаватт (МВт)), подключают к электрическим распределительным сетям, энергопотребление которых изменяется в значительной степени.
Эти генераторы подвергаются воздействию изменяющихся возмущений самых разных видов и величин, к которым относятся короткие замыкания, падения напряжения, изменение нагрузки, сброс нагрузки и т. д. Во всех случаях и на всем протяжении их рабочего диапазона требуется по возможности близкая к оптимальной характеристика. Кроме того, замкнутые контуры должны иметь достаточные запасы устойчивости.
Способы регулирования, используемые в настоящее время, в частности, для генераторов переменного тока большой мощности на атомных электростанциях, основаны на так называемом принципе четырехконтурного регулятора, в котором контуры обратной связи (ОС) используют для поддержания выходных значений как можно более близкими к опорным значениям, в частности, путем регулирования определенного числа управляемых параметров.
Эти способы основаны на аналоговых технологиях и очень чувствительны к погрешностям измерений и даже являются относительно неэффективными в части обеспечения устойчивости замкнутых контуров в широком диапазоне. В частности, в этих способах с использованием замкнутого контура создаются колебания, которые трудно демпфировать, и часто они плохо демпфируются.
Более конкретно эти способы регулирования и регуляторы, в которых они применяются, не удовлетворяют техническим требованиям к источникам электропитания, относящимся к возбудителю и оборудованию регулирования напряжения генераторов переменного тока большой мощности на атомных электростанциях в течение всех стадий использования.
Для по меньшей мере частичного устранения ранее упомянутых недостатков изобретение заключается в способе автоматического регулирования системы, в котором множество характеристических параметров системы измеряют и в котором по меньшей мере один параметр управления применяют в качестве функции измеренных параметров, отличающемся тем, что:
- выбирают номинальную рабочую точку системы,
- определяют номинальную модель, описывающую систему в этой номинальной рабочей точке,
- определяют набор моделей, представляющих возможные вариации, относящиеся к номинальной модели,
- расчетные характеристические выходных параметров, соответствующие измеримым характеристическим параметрам, определяют из упомянутой номинальной модели,
- определяют погрешности между по меньшей мере одним из измеренных характеристических выходных параметров и по меньшей мере одним из расчетных характеристических выходных параметров, и
- применяют по меньшей мере один параметр управления системы в качестве функции погрешностей, определенных дли снижения погрешности между по меньшей мере одним из расчетных характеристических выходных параметров и соответствующим по меньшей мере одним измеренным значением измеренных характеристических выходных параметров.
В полученном способе не используют оцениватель для получения опорных значений, и это делает способ менее чувствительным к параметрическим неопределенностям в части не поддающихся измерению величин, особенно относящихся к статусу системы.
Кроме того, способ может иметь одну или несколько следующих особенностей, отдельно или в сочетании.
Номинальная модель является приближением идеальной передаточной функции системы.
Номинальная модель является линеаризацией идеальной передаточной функции системы вокруг рабочей точки.
Упомянутый по меньшей мере один параметр управления системы, применяемый в качестве функции погрешностей, определенных для снижения погрешности между расчетными характеристическими выходными параметрами и измеренными характеристическими выходными параметрами, определяют при приложении оптимальной обратной связи к пополненной системе, полученной из исходной системы путем добавления интеграла к по меньшей мере одному измеримому предварительно определенному выходному параметру.
Параметр управления системы, который применяют, определяют оптимизацией интегрального критерия.
Параметр управления системы, который применяют, определяют способом линейно-квадратичного гауссова (LQG) оптимального управления.
Способ дополнительно включает в себя следующие этапы, на которых:
- параметризируют погрешность номинальной модели системы путем разложения по всем погрешностям между моделями из набора моделей, представляющих возможные вариации, и номинальной моделью,
- минимизируют заданный критерий оптимизации путем изменения по меньшей мере одного из ранее полученных параметров погрешности, относящейся к номинальной модели.
Способ также включает в себя дополнительный этап оптимизации команды с погрешностью для фиксированной номинальной модели путем определения по меньшей мере одного усиления обратной связи.
Этапы минимизации критерия оптимизации путем изменения параметров погрешности, относящейся к номинальной модели системы, и оптимизации команды с погрешностью, относящейся к фиксированной номинальной модели, путем определения по меньшей мере одного усиления обратной связи повторяют последовательно в итерационном цикле.
Способ включает в себя дополнительный этап интегрирования разности между командой и ее насыщенным значением, а по меньшей мере один параметр управления системы, применяемый в качестве функции погрешностей, определенных для снижения погрешности между расчетными характеристическими параметрами и измеренными значениями измеримых характеристических выходных параметров, определяют с учетом интеграла разности между параметром управления и его насыщенным значением.
Система включает в себя генератор переменного тока электростанции, соединенный с электрической сетью и возбудителем.
Состояние системы представляют вектором состояния, который включает в себя напряжение статора, частоту вращения ротора, полный угол и образ потока в возбудителе.
Набор выходных величин включает в себя напряжение статора, частоту вращения ротора, активную мощность и приближенное значение механической мощности, моделирующей основное возмущение.
Упомянутый по меньшей мере один параметр управления, который применяют, включает в себя приближенное значение механической мощности, моделирующей основное возмущение, и напряжение управления возбудителя.
Другим объектом изобретения является система для автоматического регулирования системы, в которой измеряется множество характеристических параметров системы и в которой по меньшей мере один параметр управления применяется в качестве функции измеренных параметров,
отличающаяся тем, что она включает в себя средство, выполненное с возможностью
- выбора номинальной рабочей точки системы,
- определения номинальной модели, описывающей систему в этой номинальной рабочей точке,
- определения расчетных характеристических выходных параметров, соответствующих измеримым характеристическим выходным параметрам, из упомянутой номинальной модели,
- определения погрешностей между по меньшей мере одним из измеренных характеристических выходных параметров и по меньшей мере одним из расчетных характеристических выходных параметров, и
- применения по меньшей мере одного параметра управления системы в качестве функции погрешностей, определенных для снижения погрешности между по меньшей мере одним из расчетных характеристических выходных параметров и соответствующим по меньшей мере одним измеренным значением измеренных характеристических выходных параметров.
Другие признаки и преимущества станут очевидными при чтении описания нижеследующих чертежей, на которых:
фигура 1 - блок-схема последовательности действий, представляющая этапы одного варианта осуществления способа;
фигура 2 - функциональная схема, представляющая один вариант осуществления так называемой номинальной модели системы;
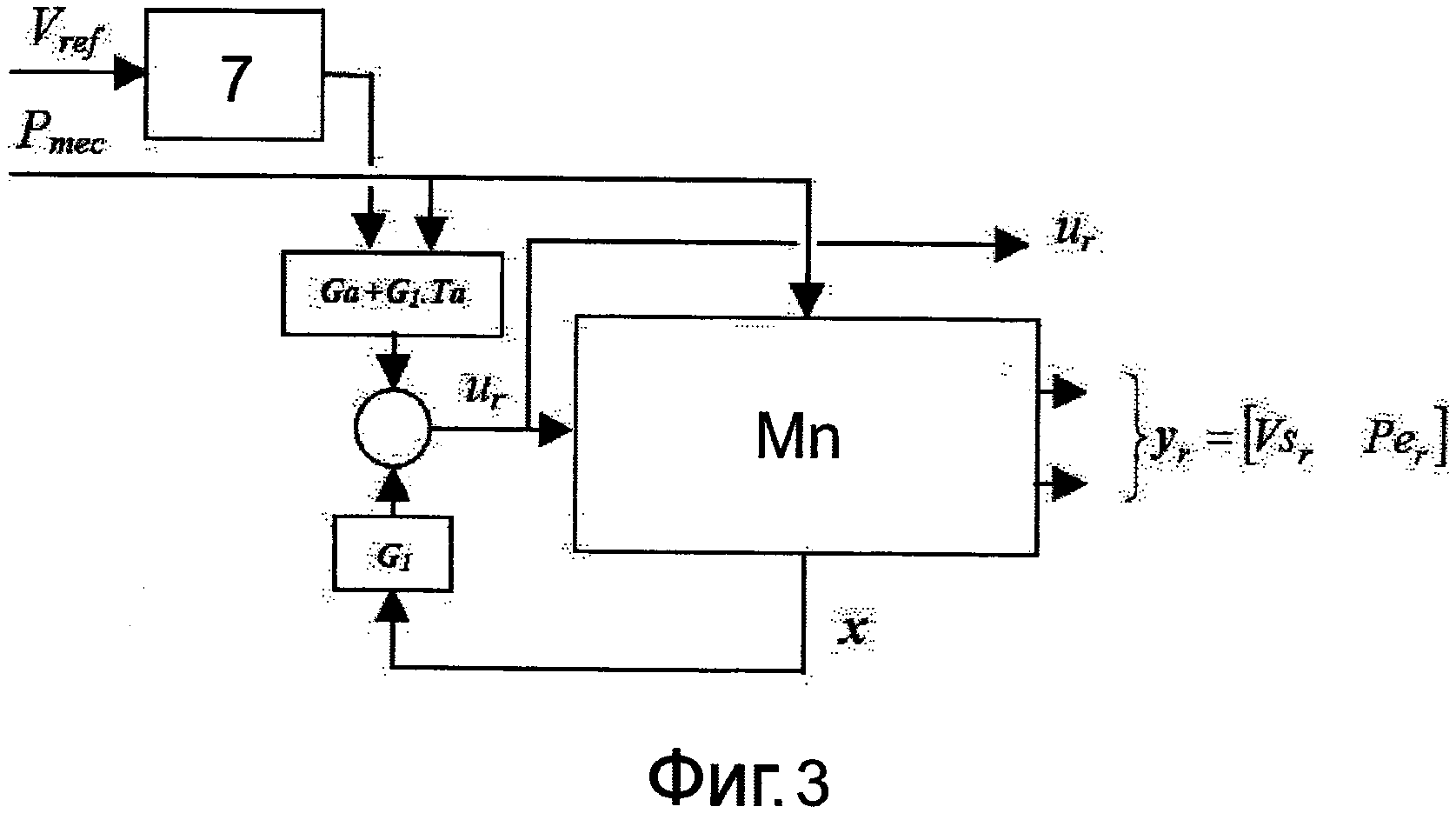
фигура 3 - функциональная схема, представляющая один вариант осуществления так называемой упреждающей прогнозирующей функции согласно изобретению;
фигура 4 - функциональная схема, представляющая один вариант осуществления так называемой расчетной модели системы обратной связи;
фигура 5 - функциональная схема, представляющая пополненную систему, используемую для снижения чувствительности в одном варианте осуществления изобретения;
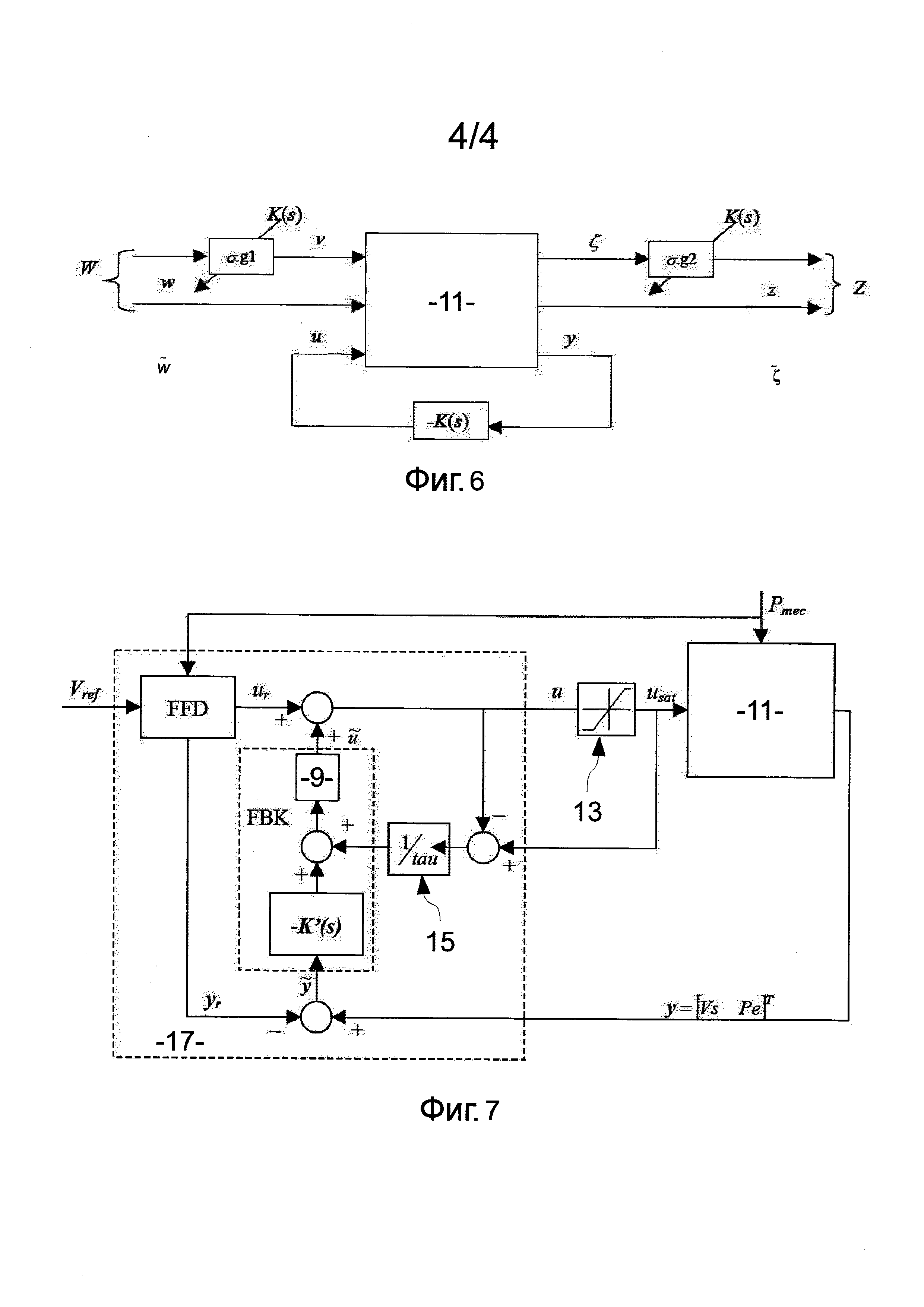
фигура 6 - функциональная схема, представляющая упрощенную вторую версию пополненной системы из фигуры 5; и
фигура 7 - функциональная схема, представляющая вариант осуществления, содержащий прогнозирующую функцию, обратную связь, снижение чувствительности и действие по управлению насыщением.
На всех фигурах одинаковые условные обозначения относятся к аналогичным элементам.
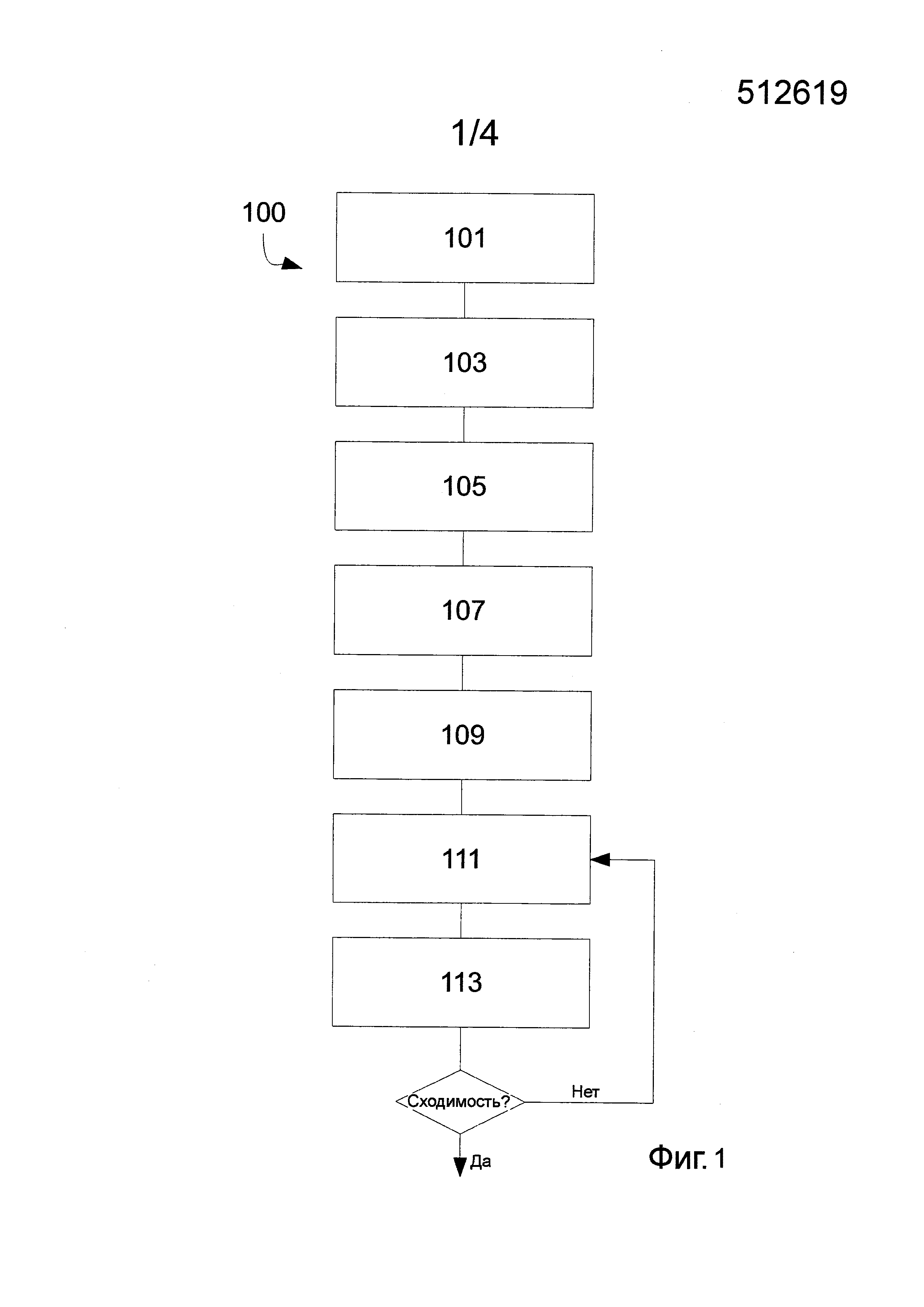
Изобретение касается способа регулирования системы. На фигуре 1 показаны различные этапы способа 100 регулирования системы. В частности, способ используют в случае генератора переменного тока, соединенного с электрической сетью. Задача заключается в подаче напряжения возбудителя на генератор переменного тока таким образом, чтобы гарантировались устойчивость генератора переменного тока и в то же время отслеживание заданного напряжения. Это заданное напряжение устанавливают с тем, чтобы отслеживать нагрузку сети, с которой соединен генератор переменного тока.
Генератор переменного тока представляет собой, например, турбогенератор переменного тока. Он содержит ротор, приводимый в движение турбиной, соединенной с реактором, и статор. Статор находится под определенным, так называемым напряжением Vs статора.
Первый этап 101 способа 100 заключается в выборе номинальной модели Mn, которая может быть весьма простой, линейной и инвариантной расчетной моделью. В частности, эта номинальная модель может отображать линеаризацию передаточной функции в предварительно определенной рабочей точке, считающейся рабочей точкой, в которой система должна работать.
Способ моделируют вокруг рабочей точки в соответствии со следующей системой уравнений:
 ,
,
В приведенных выше уравнениях:
x - вектор состояния, и в случае генератора переменного тока  , где Vs - напряжение статора, ω - частота вращения, θ - полный угол между напряжением сети и электродвижущей силой и efd - образ магнитного потока в возбудителе,
, где Vs - напряжение статора, ω - частота вращения, θ - полный угол между напряжением сети и электродвижущей силой и efd - образ магнитного потока в возбудителе,
um - входной вектор, и в случае генератора переменного тока  , где u - параметр управления и Pmec - механическая мощность, передаваемая ротору, рассматриваемая как основное возмущение,
, где u - параметр управления и Pmec - механическая мощность, передаваемая ротору, рассматриваемая как основное возмущение,
y - выходной вектор, и в случае генератора переменного тока  , где Pe - подводимая активная электрическая мощность.
, где Pe - подводимая активная электрическая мощность.
В данном случае запись […]Т обозначает операцию транспозиции, при этом векторы используются в формулах в виде вертикальных векторов.
Таким образом, модель характеризуется четырьмя матрицами Am, Bm, Cm, Dm.
Значения различных параметров выбирают из условия моделирования системы оптимальным образом вокруг заданной рабочей точки. Эта рабочая точка в общем случае является рабочей точкой, вокруг которой разработчик стремится придавать свойства устойчивости регулируемой системе. Например, в случае генератора переменного тока это будет нормальная рабочая точка.
Выбираемые матрицы Am, Bm, Cm и Dm должны быть инвариантными в контексте инвариантной линейной модели. Эта инвариантная линейная модель представляет первое приближение, которым легко оперировать и моделировать систему вокруг рабочей точки в большей или меньшей близости в зависимости от требуемого допуска. Эта модель обычно является линейным приближением первого порядка передаточной функции, описывающей реальную эволюцию системы.
Время или другие переменные параметры можно вносить в явном виде как значения матриц Am, Bm, Cm и Dm. В этом случае при вычислениях следует учитывать значения производных этих матриц. В зависимости от вида временной зависимости это быстро усложняет вычисления, но способ в целом остается неизменным.
На фигуре 2 представлена функциональная схема системы, моделируемой таким способом.
Центральным элементом этой функциональной схемы 1 является номинальная модель Mn, которая содержит генератор 3 переменного тока и возбудитель 5. Номинальная модель Mn принимает в качестве входных сигналов заданное напряжение Vref, параметр u управления и основное возмущение Pmec.
В качестве выходных данных с номинальной модели Mn выдается набор физических выходных величин, который включает в себя напряжение Vs статора, из которого вычитается заданное напряжение Vref для получения погрешности e относительно заданного значения, электрическая мощность Pe и вектор  .
.
Значения e и Pe группируются в вектор  .
.
Вид возмущений большей частью известен, а возмущения связаны с физической реализацией электростанций и сетей и, в частности, связаны с тем, что на электростанциях обычно используют определенное количество генераторов переменного тока, параллельно подключенных к линиям и потребителям, число которых изменяется.
Можно выделить определенное количество относящихся к делу возмущений, в том числе:
- трехфазное короткое замыкание: напряжение в сети резко падает до нулевого в течение короткого периода времени, это приводит к тому, что воспринимается только реактивное сопротивление трансформатора, после чего реактивное сопротивление линии восстанавливается,
- понижение напряжения: аналогично короткому замыканию, но для промежуточного значения падения напряжения сети,
- сброс нагрузки, последствие длительного короткого замыкания или понижения напряжения: генератор переменного тока отключается от всей или части сети; в экстремальном случае энергия больше не поставляется, кроме как к вспомогательным устройствам для поддержания работы самого генератора,
- потеря соседнего агрегата: в контексте множества параллельных генераторов переменного тока отказ или остановка соседнего генератора переменного тока (агрегата) может приводить к недовозбуждению рассматриваемого генератора переменного тока,
- потеря по меньшей мере одного соседнего агрегата при низком напряжении, ведущая к работе на пределе перевозбуждения: последующая остановка одного или нескольких соседних агрегатов, рассматриваемый генератор переменного тока переключается в режим ограничения тока, и
- падение частоты, вызванное потерей объекта генерирования механической мощности, которая отражается в падении частоты порядка нескольких сотен миллигерц на протяжении нескольких секунд.
Упомянутые выше возмущения представляют собой характерные возмущения, встречающиеся в реальной сети, и должна иметься возможность исключения их во временных масштабах, представленных в технических требованиях.
На этапе 103 из фигуры 1 номинальную модель пополняют прогнозирующими моделями, выбираемыми из условия сведения к нулю заданного значения и основного возмущения Pmec. В таком случае система уравнений, отражающая это, имеет следующий вид:
 , где
, где 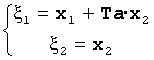 ,
,
при этом A11=Am, A22=0, B1=Bm1, Cy1=Cm, De=Dy=0,
а векторы x1=x,  , и ua=-Ga·x2.
, и ua=-Ga·x2.
Bm1 представляет собой подматрицу Bm большего порядка, соответствующего размера, и Ga является усилением, определяемым путем решения известной задачи регулирования с внутренней устойчивостью (PRIS), исходя из которой формируют приведенные выше уравнения. Однако это усиление можно получать в соответствии другими известными способами управления с обратной связью в регуляторе.
Затем на этапе 105 из фигуры 1 пополненную модель используют для реконструкции состояния процесса. Реконструкция состояния обычно основана на блоке оценки, таком как фильтр Калмана. С другой стороны, в данном случае она основана на используемой модели и измеряемых величинах, по которым реконструируют состояние. Поэтому в способе используют номинальную модель, в данном случае расчетную модель, для определения расчетных параметров, которые будут служить эталонами. Поэтому эту функцию способа называют упреждающим (FFD) прогнозирующим действием прогнозирующего устройства, разновидность которого реализуют привнесением опорных величин в противоположность классической обратной связи.
Благодаря FFD обходятся без блока оценки состояния. Кроме того, при помещении всех не поддающихся измерению величин в упомянутый вектор состояния дополнительные вычисления не вытекают из них.
На этапе 107 из фигуры 1 оптимальную обратную связь применяют, чтобы получить опорные параметры управления, обеспечивающие оптимальное отслеживание заданного значения, получаемого в контексте номинальной модели. Линейную обратную связь осуществляют в значительной мере оптимизацией интегрального критерия, который в случае генератора переменного тока может иметь вид:
 ,
,
где Sr и Rr представляют собой положительные весовые матрицы.
Более конкретно можно применить способ, такой как способ линейно-квадратичного гауссова (LQG) управления, для осуществления этой оптимальной обратной связи.
На фигуре 3 показана функциональная схема системы с контуром упреждающего прогноза согласно одному варианту осуществления.
Центральным элементом функциональной схемы из фигуры 3 является номинальная модель Mn.
В качестве входных сигналов принимаются механическая мощность Pmec и заданное напряжение Vref. Заданное напряжение Vref фильтруется фильтром 7 первого порядка, имеющим известную постоянную Tref времени и соответственно передаточную функцию (1+sTref)-1.
Опорная команда ur определяется на основании отфильтрованного заданного напряжения, механической мощности Pmec и состояния x системы. Эта опорная команда ur подается на блок Mn, с которого в качестве выходного сигнала выводится опорный выходной вектор yr. В случае генератора переменного тока опорный или оцененный выходной вектор включает в себя опорное напряжение Vsr статора и опорную электрическую мощность Per.
На выходе контура прогноза получают набор расчетных опорных величин, состоящий из опорной команды ur и опорного выходного вектора yr.
На упомянутой фигуре 3 можно видеть, что оптимальная обратная связь, используемая для получения опорной команды, имеет вид [G1; Ga+G1.Ta]. Усиление G1 получают оптимизацией интегрального критерия на основании командного интервала Tr при использовании одного из обычных способов. Ga и Ta получают на основании классического решения задачи PRIS, Ta является интервалом интегрирования при определении Ga. Полное усиление используемой оптимальной обратной связи является суммой этих двух членов.
Затем по меньшей мере один из параметров опорных величин ur и yr используют в обратной связи (ОС) для определения погрешности относительно номинальной модели. Для этого погрешности между по меньшей мере одним из измеренных характеристических выходных параметров y и по меньшей мере одним из расчетных характеристических выходных параметров yr определяют и по меньшей мере один командный параметр u системы применяют или модифицируют в качестве функции погрешностей, определенных для снижения погрешности между расчетными характеристическими параметрами yr и измеренными значениями измеримых характеристических параметров y.
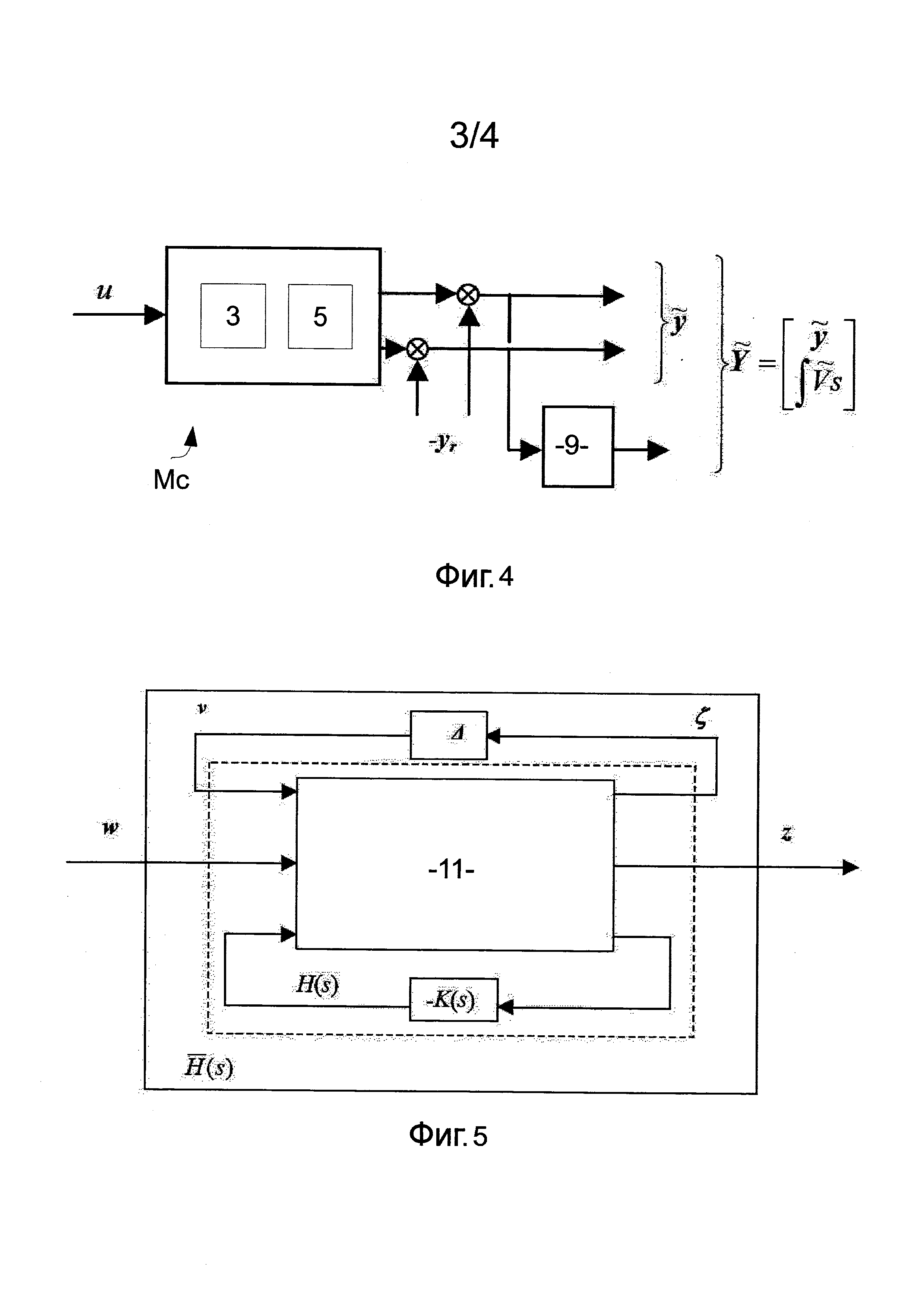
Действие этой обратной связи (ОС) в так называемой расчетной модели Mc показано на фигуре 4 и будет определено прежде всего.
Центральным блоком этой схемы является блок, объединяющий генератор 3 переменного тока и возбудитель 5, на этот раз в реальном виде. Этот блок принимает в качестве входных сигналов реальную команду u и выдает в качестве выходных сигналов выходной вектор y величин, из которого вычитается опорный выходной вектор yr для получения вектора  погрешностей выходных данных относительно эталона. Этот вектор
погрешностей выходных данных относительно эталона. Этот вектор  пополняется для получения вектора
пополняется для получения вектора  добавлением интегрального значения Vs-Vsr путем выборки Vs-Vsr и пропускания через интегратор 9.
добавлением интегрального значения Vs-Vsr путем выборки Vs-Vsr и пропускания через интегратор 9.
Стандартная модель, связанная с процессом пополнения, имеет вид:
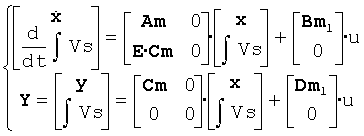 ,
,
где Е - матрица, позволяющая выбирать выходной параметр, относительно которого должно производиться интегральное действие.
Наконец, расчетную модель выбирают в рабочей точке процесса, которая может быть такой же, как рабочая точка для FFD.
Затем решают задачу оптимизации расчетной системы в рабочей точке.
В решении можно использовать известный двойной регулятор с типом управления LGQ/LTR.
В таком случае регулятор имеет две отдельные функции: функцию реконструкции пополненного состояния интеграла выходного напряжения и оптимальной линейной обратной связи для реконструированного пополненного состояния.
Изобретением обеспечивается дополнительное повышение устойчивости команды, подаваемой при снижении чувствительности. Для этого в способе осуществляют моделирование вокруг номинальной рабочей точки, выбираемой следующим образом:
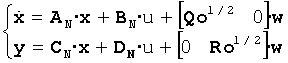 ,
,
где w - гауссов белый шум, повторно переписывающий состояние и шум измерения.
Номинальную модель завершают на этапе 109 из фигуры 1 набором K моделей {Mi}, выбранных в качестве представляющих возможные вариации состояния системы. Эти модели, строго выбранные, образуют базу вариаций.
Затем погрешность между любой моделью из набора Mk и номинальной моделью MN параметризируют путем проецирования разности M-MN на погрешности между моделями из набора {Mi} и номинальной моделью MN:
Mk-MN=∑δik(Mi-MN),
где δik, изменяющееся от 0 до 1, представляет собой нормированный параметр.
В таком случае выработку параметров δ можно определить следующим образом:
Δ=[δik]i=1, …, m; k=1, …, K.
В частности, количество параметров δi ограничено числом m лежащих в основе реальных параметров. В таком случае следующую систему уравнений можно получить для описания эволюции системы:
 ,
,
где 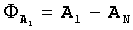 , …,
, …,  ,…,
,…,  ,…,
,…,  ,
,
 ,
,  ,
,
и где  .
.
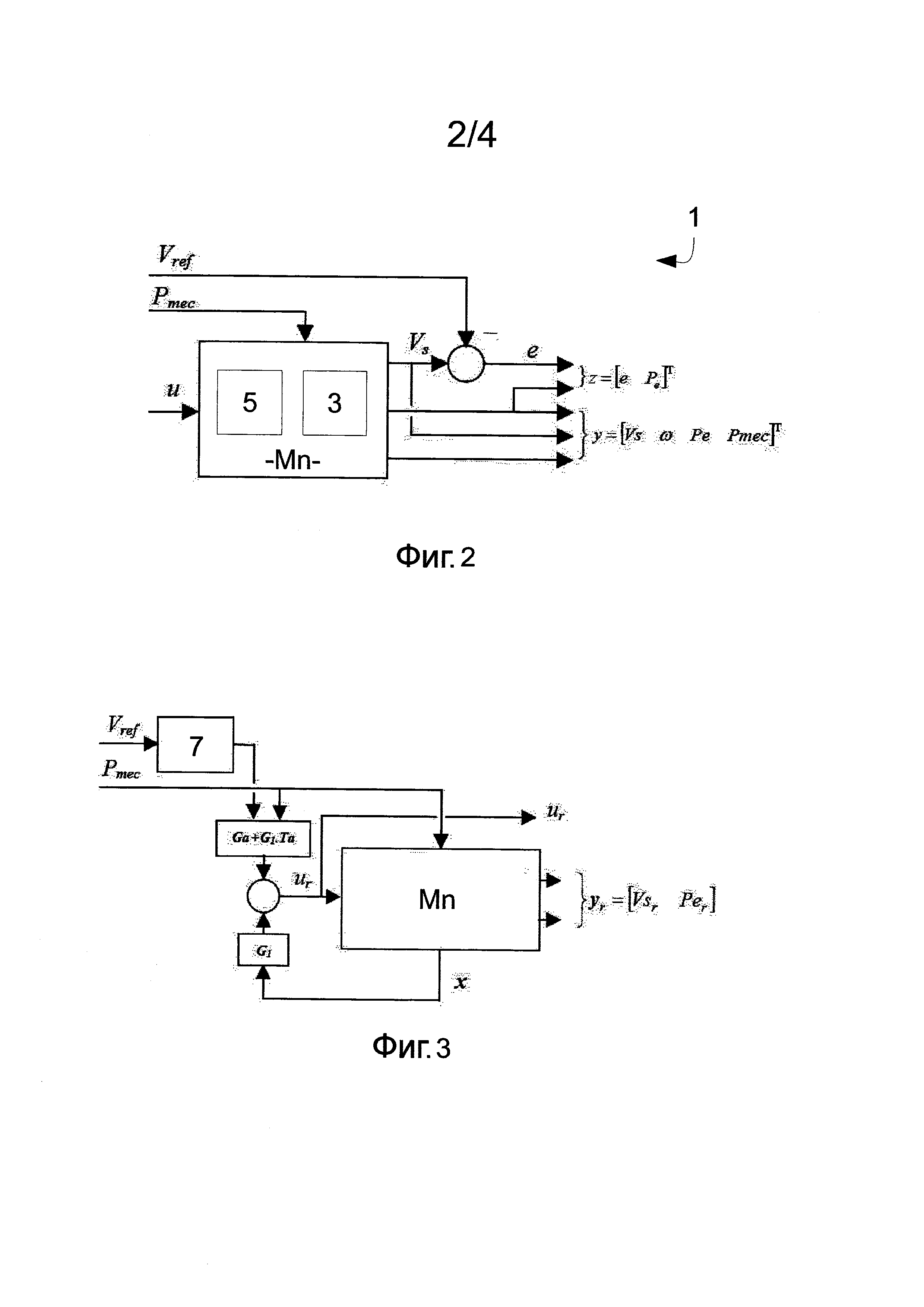
Затем эволюцию системы описывают системой уравнений, представленной в виде функциональной схемы на фигуре 5.
На этой фигуре центральным блоком 11 представлена стандартная система, характеризуемая Am, Bm, Cm, Dm, Q0, R0 и набором моделей {Mk}.
Неопределенности передаются во внешний контур усиления Δ.
Оптимальная команда при фиксированном Δ определяется контуром усиления -K(s).
Далее определены две системы. Первая система H(s) охватывает стандартную систему 11 и контур усиления -K(s). Вторая  содержит систему H(s) и контур усиления Δ.
содержит систему H(s) и контур усиления Δ.
Система H(s) принимает в качестве входных сигналов w и v и выдает в качестве выходных сигналов ζ и z. ζ передается в контур усиления Δ для получения v (см. приведенные выше уравнения).
В таком случае при определенных Hζv, HζW, Hzv и Hzw зависимые подматрицы K(s) передаточной функции H(s):
 .
.
Это переводится на полную систему H(s) как:
H=Hzw+HzvΔ1/2(I-Δ1/2HζvΔ1/2)-1Δ1/2Hζw.
В предположении, что  , где σ - произвольный небольшой регулировочный параметр и
, где σ - произвольный небольшой регулировочный параметр и  является нормой (норма равна, например, 2 или бесконечности), передаточную функцию H можно разложить в ряд Тейлора.
является нормой (норма равна, например, 2 или бесконечности), передаточную функцию H можно разложить в ряд Тейлора.
В таком случае H≈Hzw+HzvΔHζw+HzvΔHζvΔHζW.
Процесс оптимизации, представленный функциональной схемой на фигуре 6, выполняют путем введения реконструированных векторов  и
и  , в этом конкретном случае при использовании FFD прогнозирующего устройства, описанного выше. Кроме того, можно использовать реконструированное состояние, получаемое другим способом, например, блоком оценки Калмана.
, в этом конкретном случае при использовании FFD прогнозирующего устройства, описанного выше. Кроме того, можно использовать реконструированное состояние, получаемое другим способом, например, блоком оценки Калмана.
В этой пополненной системе принимают в качестве входных сигналов w и  , объединенные в вектор W, отдельно или по двум параллельным линиям,
, объединенные в вектор W, отдельно или по двум параллельным линиям,  умножают на σHζw. Для получения ζ и z на центральный системный блок 11 подают w и v. На выходе системного блока 11 получают ζ и z. ζ умножают на σHzv для получения ζ в группе с z в виде единственного выходного вектора Z.
умножают на σHζw. Для получения ζ и z на центральный системный блок 11 подают w и v. На выходе системного блока 11 получают ζ и z. ζ умножают на σHzv для получения ζ в группе с z в виде единственного выходного вектора Z.
Пополненная система также включает в себя контур обратной связи по усилению -K(s), который соединяет выход y со входом u системного блока 11.
Начиная с регулятора с несниженной чувствительностью, в котором усиление контура обратной связи имеет значение K0, оптимизацию системы H далее применяют к Δ при фиксированном K(s), имеющем значение K0. Таким образом, получают новую систему 11, подлежащую оптимизации относительно K(s) для определения нового усиления K1 этого контура. При этом новом усилении K1 новую систему 11 создают путем оптимизации, применяемой к Δ. Эти последние этапы затем повторяют. δik являются дополнительными регулировочными параметрами. Поэтому во время этапов оптимизации их можно регулировать только частично. Выбор δik, подлежащих модификации, в основном зависит от формы выбираемых моделей.
Hζw и Hzv зависят от значения K(s) и поэтому при каждой итерации размер K(s) возрастает. Для предотвращения этого при втором приближении можно заменять Hζw и Hzv статическими коэффициентами g1, g2 усиления при взвешивании  с использованием σ.
с использованием σ.
Таким образом, получают итерационный цикл, который можно повторять до удовлетворения условия сходимости. На практике в большинстве случаев пяти повторений оказывается достаточно, и поэтому такое фиксированное число повторений приводит к приемлемому результату.
На фигуре 7 показана функциональная схема одного варианта осуществления регулятора генератора 3 переменного тока, возбудителя 5, описанных выше, дополнительно включающих в себя функцию устранения насыщения.
Реальная машина имеет только один ограниченный ряд команд u. Ограничение ряда является результатом технической реализации системы, и степень ограничения зависит от варианта осуществления.
Функциональная схема на фигуре 7 содержит упомянутую систему 11 с функцией снижения чувствительности, прогнозирующий блок FFD, блок FBK функции обратной связи и дополнительный блок 13 для учета насыщения команды u.
Блок FFD принимает основное возмущение Pmec и опорное напряжение Vref и выдает в качестве выходных сигналов опорные величины ur, yr.
Блок FBK принимает в качестве входного сигнала разность между выходным сигналом системного блока 11 и опорным выходным сигналом yr и при наличии усиления -K'(s) контура обратной связи обеспечивает получение прототипа  команды, к которому добавляет опорную команду ur для получения команды u, которая после введения в дополнительный блок 13 насыщения приводит к получению насыщенной команды usat, которая подается на систему 11.
команды, к которому добавляет опорную команду ur для получения команды u, которая после введения в дополнительный блок 13 насыщения приводит к получению насыщенной команды usat, которая подается на систему 11.
Прототип  команды получают при использовании интегратора 15 устранения насыщения с усилением 1/tau, в котором интегрируют разность между командой u и насыщенной командой usat.
команды получают при использовании интегратора 15 устранения насыщения с усилением 1/tau, в котором интегрируют разность между командой u и насыщенной командой usat.
В частности, следует заметить, что интегратор 9 размещен в блоке FBK вблизи его выхода, который соответствует изменению переменной, относящейся к FBK, описанной выше.
При моделировании полученного регулятора были выявлены полезные результаты, относящиеся к удалению возмущений, упомянутых выше в контексте моделирования, опирающегося, в частности, на EPR в Фламанвилле (европейский реактор с водой под давлением).
В частности, в случае коротких замыканий мощность восстанавливалась меньше чем за 10 с, и в то же время обеспечивалось поддержание полного угла (при котором гарантируется устойчивость) наряду с широким диапазоном рабочих точек регулятора.
В случае понижений напряжений во всех исследованных случаях напряжение на выводах трансформатора, подключенного к генератору переменного тока, оставалось в пределах, установленных EDF.
В случае сброса нагрузки напряжение возвращалось к конечному значению с отклонением меньше 1% быстрее чем за 10 с.
В случае падения частоты возврат к нормальному значению с отклонением в пределах 1% происходил быстрее чем за 8 с при погрешности напряжения относительно заданного значения, не превышавшей 4%.
В частности, время возврата с отклонением в пределах 1% требуемого значения свидетельствуют о быстром и эффективном исключении колебаний.
Таким образом, способ позволяет снижать возмущения состояния системы. Путем смещения реального состояния к идеальному состоянию способом обеспечивается устойчивость системы, которая в таком случае зависит только от точности используемой модели и точности измерений.
Байпас турбины
Система нагрева для водяного контура тепловой электростанции
Рабочая лопатка для газовой турбины, способ изготовления указанной лопатки и газовая турбина с такой лопаткой
Осевая газовая турбина
Система управления
Присадочный материал для сварки
Кожух электрического проводника, оснащенный датчиками тока
Лопатка газовой турбины с аэродинамическим профилем и профилированными отверстиями на задней кромке для выхода охлаждающего агента
Распределение в электролизере рециркулируемого отходящего газа
Ротор турбинной установки, компрессор и турбина для турбинной установки и способ модернизации ротора
Балансировка ротора турбины при пониженном давлении
Байпас турбины
Система нагрева для водяного контура тепловой электростанции
Рабочая лопатка для газовой турбины, способ изготовления указанной лопатки и газовая турбина с такой лопаткой
Осевая газовая турбина
Система управления
Присадочный материал для сварки
Кожух электрического проводника, оснащенный датчиками тока
Лопатка газовой турбины с аэродинамическим профилем и профилированными отверстиями на задней кромке для выхода охлаждающего агента
Распределение в электролизере рециркулируемого отходящего газа

