Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ
Вид РИД
Изобретение
Изобретение относится к судостроению и может быть использовано для погрузочно-разгрузочных работ между судами на ходу в условиях качки.
Известен способ траверзной передачи сухих и жидких грузов между судами на ходу, для осуществления которого используются специальные грузопередающие системы, оснащенные канатными связями между судами и соответствующими к ним механизмами, в частности, лебедками с гидравлическим приводом (http://www.sudmash.ru/produce/sudmash/transfer-gears.html).
Недостатком способа является следующее. В условиях качки обоих судов расстояние между судами, координаты точек крепления начала и конца канатов постоянно меняются, поэтому для обеспечения условий транспортировки грузов необходима корректировка длины канатов и скорости их перемещения. Это реализуется за счет поддержания постоянного натяжения канатов. Ограничение существующего способа состоит в мощности привода лебедки, которая обеспечивает оперативную компенсацию изменения длины канатов, для чего требуются приводы с большими скоростями перемещения каната. Такие скорости может обеспечить только сложное и дорогостоящее гидравлическое оборудование.
Известно устройство для передачи грузов между судами в море в условиях качки, которое содержит передающее судно с мачтой и принимаюшее судно с мачтой, между которыми натянуты ветви каната с грузовой тележкой, концы которого соединены с лебедками, соединенными через редукторы с электродвигателями, а также электронный узел управления режимом работы электродвигателей, включаюший в себя два контура частоты тока, каждый из которых состоит из соединенных между собой инверторов тока, датчиков тока и выпрямителей тока, подключенных соответственно к контурам стабилизации натяжения, что улучшает динамику регулирования натяжения канатов, два регулятора частоты с соответствующими сумматорами, соединенные соответственно с контурами стабилизации скорости, что обеспечивает получение стабильных скоростей перемещения грузовой тележки и требуемой перегрузочной способности электродвигателей (SU 1357307, МПК B63B 27/30, опубл. 07.12.1987). Известное устройство принято за прототип.
Недостатком устройства и описанного способа передачи грузов является то, что объектом регулирования является натяжение каната. В условиях качки обоих судов расстояние между судами, координаты точек крепления начала и конца канатов постоянно меняются, поэтому для обеспечения условий транспортировки грузов необходима корректировка длины канатов и скорости их перемещения. Это осуществляется за счет поддержания постоянного натяжения канатов, реализуемого специальной электронной схемой. Ограничение известных устройств состоит в узкой области применения и малой эффективности выбранного метода управления передачей груза.
Задачей изобретения является повышение надежности передачи как сухих, так и жидких грузов с одного судна на другое на ходу в условиях качки за счет управления траекторией движения груза, которое осуществляют изменением как натяжения, так и длины канатов, а также упрощение способа передачи за счет применения управляемых лебедок с электроприводом.
Технический результат - снижение необходимой мощности лебедок, отсутствие раскачки груза и резонансных явлений на всем протяжении перемещения груза по канатной дороге, обеспечение безопасного «отрыва/посадки» груза в начальной/конечной точке во всем диапазоне качек, точное управление перемещением груза.
Задача решается, а технический результат достигается способом передачи сухих и жидких грузов между судами на ходу, включающим сооружение канатной дороги между передающим и принимающим судами с мачтами, измерение угловых и линейных ускорений обоих судов при помощи инерциальных датчиков, размещенных на судах, а также определение расстояния между мачтами путем измерения длины вытравленного каната при помощи датчиков длины каната, размещенных на передающем судне, передачу указанной информации посредством беспроводной или проводной связи в электронный блок управления лебедками, с помощью которого рассчитывают координаты судов и координаты точек крепления канатов в определенный момент времени и в зависимости от их изменения формируют управляющий сигнал на приводы лебедок для оптимального натяжения канатов.
Согласно изобретению:
- для передачи грузов небольшой массы сооружают двухканатную дорогу, причем управляемыми являются две лебедки;
- для передачи грузов повышенной массы сооружают трехканатную дорогу, причем управляемыми являются три лебедки;
- для передачи жидких грузов сооружают канатную дорогу с одним несущим канатом и несколькими канатами-оттяжками, причем управляемыми являются более трех лебедок.
Задача решается также системой передачи сухих и жидких грузов между судами на ходу, включающей передающее и принимающее судна с мачтами, между которыми натянуты канаты, концы которых соединены с управляемыми лебедками, установленными на передающем судне и соединенными с электронным блоком управления лебедками, который соединен также с датчиками натяжения каната, установленными на передающем и принимающем судах. В отличие от прототипа на обоих судах установлены инерциальные датчики, а на передающем судне установлены датчики длины каната для передачи информации посредством беспроводной или проводной связи в блок управления лебедками, с которым соединены выходы пульта управления и источника питания.
Согласно изобретению:
- система содержит два каната и две управляемые лебедки;
- система содержит три каната и три управляемые лебедки;
- система содержит один несущий канат и несколько канатов-оттяжек, причем управляемыми являются более трех лебедок.
Технический результат достигается благодаря следующему.
Управление траекторией движения груза осуществляют изменением длины и натяжения канатов, при этом управление приводами лебедок обеспечивают посредством электронного блока управления лебедками, который на основе данных от инерциальных датчиков рассчитывает координаты судов и координаты точек крепления канатов в определенный момент времени и в зависимости от их изменения формирует управляющий сигнал на привод лебедки для оптимального натяжения канатов. Путем изменения длины канатов блок управления обеспечивает перемещение грузов и компенсацию качки и линейных перемещений обоих судов. Натяжение канатов при этом не остается постоянным.
Это позволяет:
- предпринять упреждающие корректирующие действия по изменению длины канатов, что снижает требуемую максимальную скорость и мощность лебедки, увеличивает длительность ее работы;
- оперативно предотвращать недопустимую раскачку груза, погасить резонансные явления на всем протяжении перемещения груза по канатной дороге;
- обеспечить безопасный «отрыв/посадку» груза в начальной/конечной точке дороги во всем диапазоне качек.
Использование управляемых лебедок с электроприводом позволяет упростить способ передачи грузов за счет исключения стационарной гидростанции с гидроаккумуляторами и трубопроводами высокого давления; использовать способ на неспециализированных судах, без стационарной гидростанции; добиться более точного управления перемещением груза.
Сущность изобретения поясняется чертежами, где:
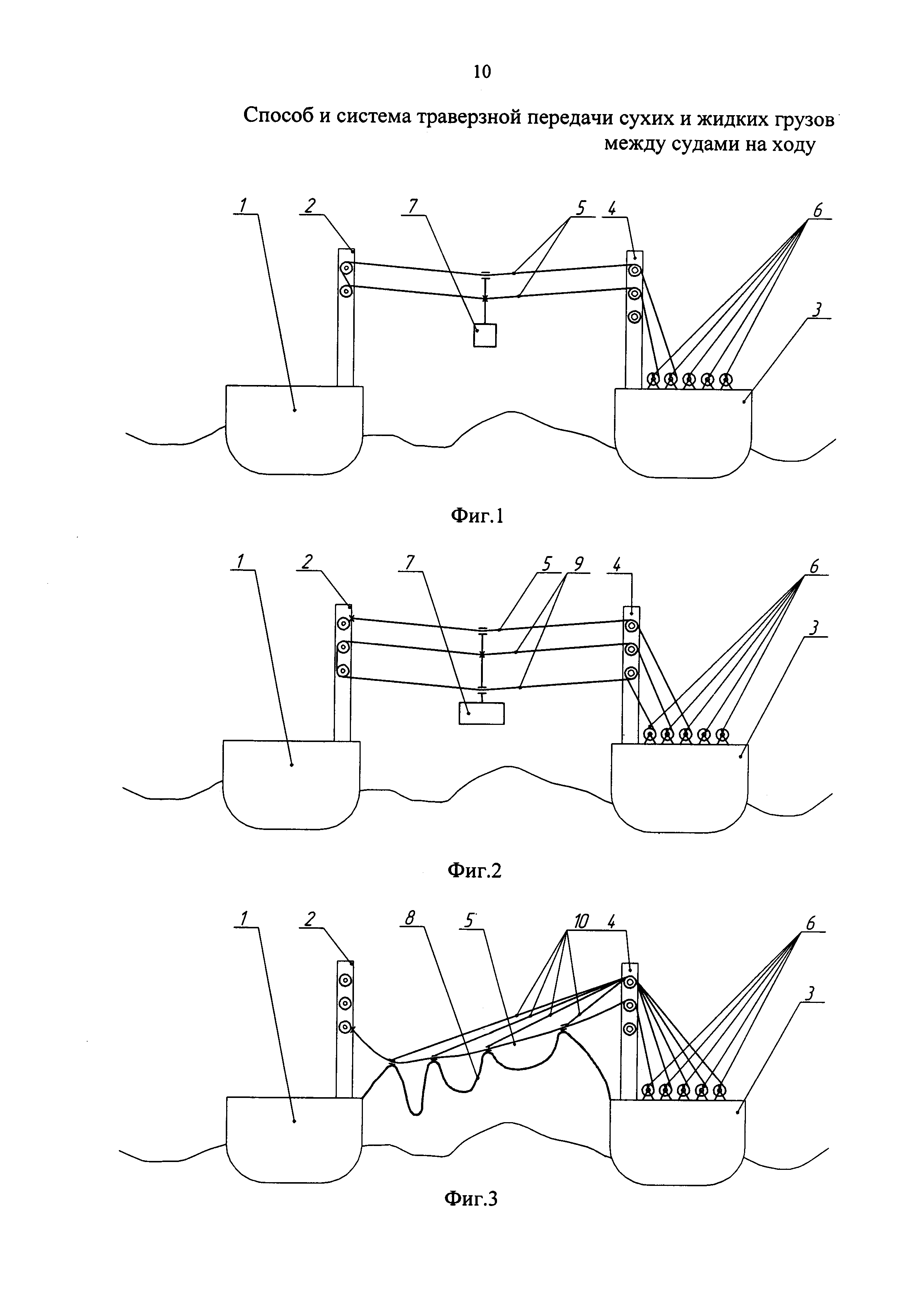
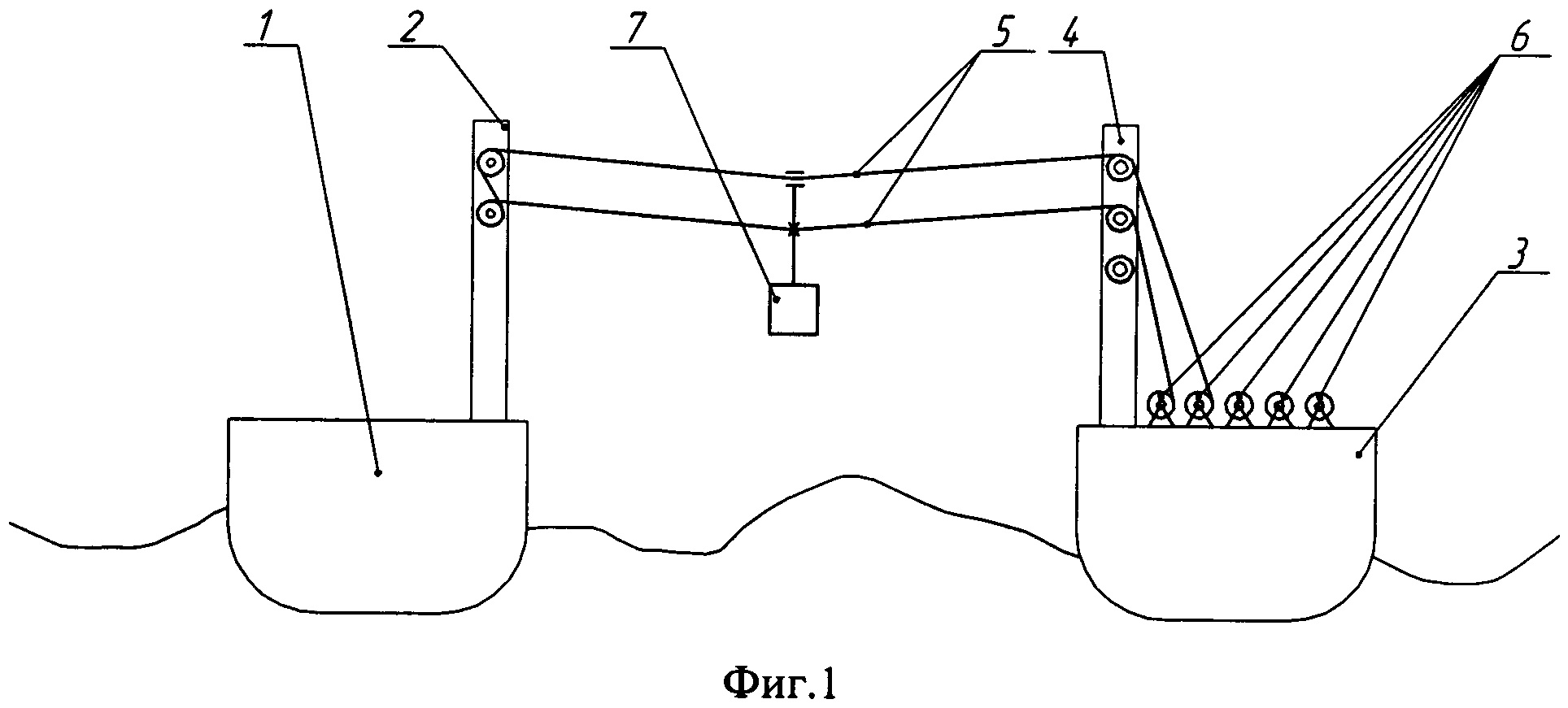
на фиг. 1 схематично представлена двухканатная дорога для передачи грузов небольшой массы;
на фиг. 2 - трехканатная дорога для передачи грузов повышенной массы;
на фиг. 3 - канатная дорога с одним несущим канатом и несколькими канатами- оттяжками для передачи жидких грузов;
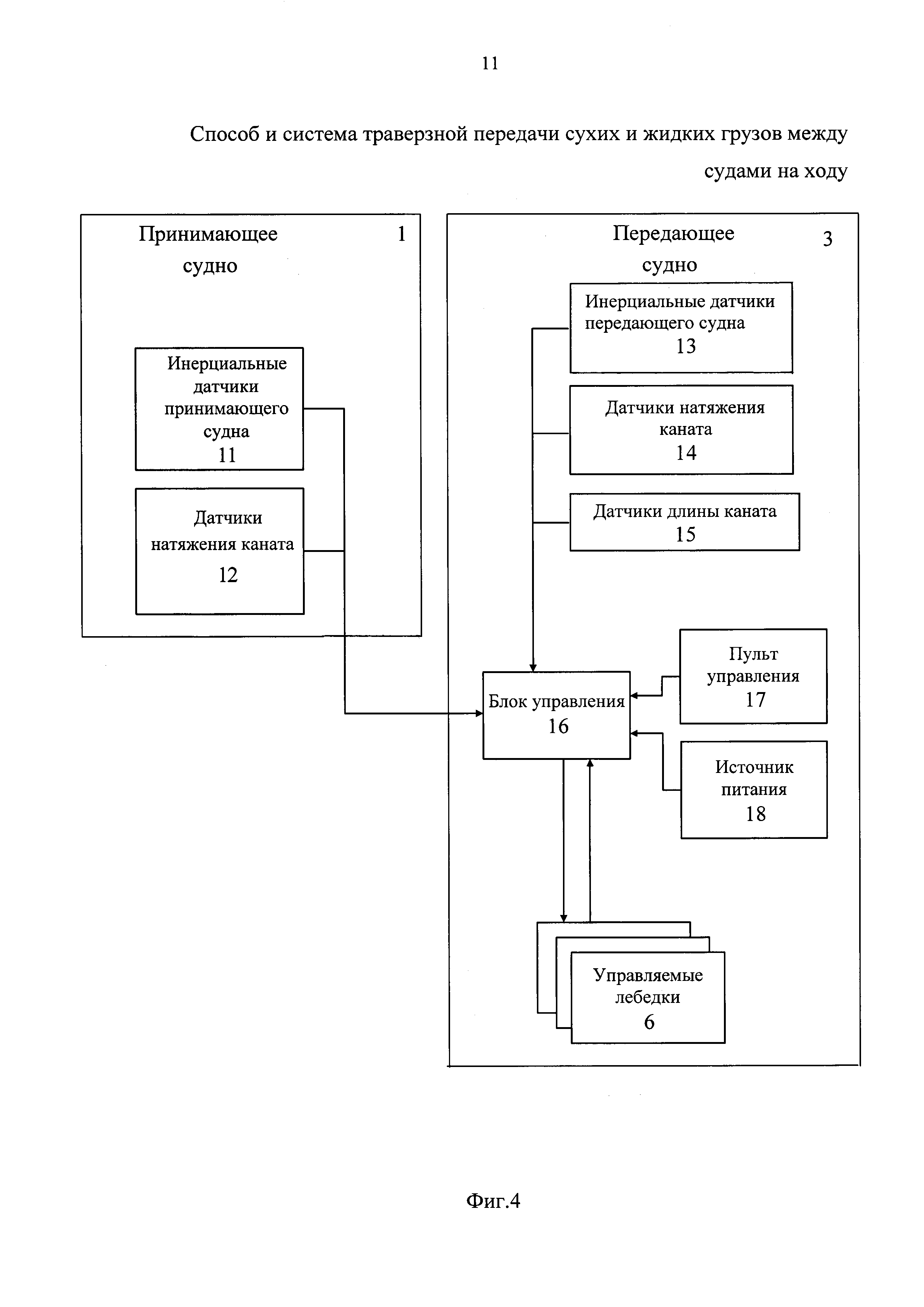
на фиг. 4 - блок-схема системы управления передачей грузов.
На чертежах обозначено: принимающее судно 1 с мачтой 2, передающее судно 3 с мачтой 4, несущие канаты 5, управляемые лебедки 6, груз 7. Кроме того, на фиг. 3 позицией 8 обозначен гибкий рукав для передачи жидких грузов, на фиг. 2 позицией 9 - транспортные канаты, на фиг. 3 позицией 10 - канаты-оттяжки.
На фиг.4: 1 - инерциальные датчики принимающего судна, 12 - датчики натяжения каната принимающего судна, 13 - инерциальные датчики передающего судна, 14 - датчики натяжения каната передающего судна, 15 - датчики длины каната передающего судна, 16 - блок управления лебедками, 17 - пульт управления, 18 - источник питания.
Способ траверзной передачи сухих грузов между судами на ходу осуществляют следующим образом (фиг. 1, фиг. 2).
Сооружают канатную дорогу между передающим 3 и принимающим 1 судами. Инерциальные датчики 11 и 13 (фиг. 4), размещенные на судах, измеряют угловые и линейные ускорения обоих судов, а расстояние между мачтами судов определяют путем измерения длины вытравленного каната датчиками 15. Информация посредством беспроводной или проводной связи передается в электронный блок 16 управления лебедками 6, который рассчитывает координаты судов и координаты точек крепления канатов 5 и 9 в определенный момент времени и в зависимости от их изменения формирует управляющий сигнал «травить - выбирать канаты» на приводы лебедок 6 для оптимального натяжения канатов 5 и 9.
Для передачи грузов небольшой массы сооружают двухканатную дорогу, причем управляемыми являются две лебедки (фиг. 1). Для начала движения груза блок управления 16 (фиг. 4), не прекращая управление лебедками 6 с целью компенсации качки, придает канатам 5 постепенно ускоряющееся движение, что обеспечивает плавный отрыв груза от передающего судна. Вблизи принимающего судна происходит аналогичное плавное торможение с целью предотвращения удара груза 7.
Для передачи грузов повышенной массы сооружают трехканатную дорогу (несущий канат 5 и два транспортных 9), причем управляемыми являются три лебедки (фиг. 2). Блок управления 16 (фиг. 4) в процессе передачи груза 7 постоянно обеспечивает натяжение несущего каната 5, изменяя его длину, пропорционально изменяя длину транспортных канатов 9.
Для передачи жидких грузов сооружают канатную дорогу с одним несущим канатом 5 (фиг. 3) и несколькими канатами-оттяжками 10, причем управляемыми являются более трех лебедок. В рабочем состоянии на несущем канате 5, одним концом жестко соединенном с принимающим судном 1, на скользящих опорах подвешен гибкий рукав 8 для передачи жидкостей между судами. Опора несущего каната на передающем судне 3 расположена выше его крепления на принимающем, поэтому рукав 8 на скользящих опорах стремится под собственным весом переместиться к принимающему судну 1. Это движение ограничивают оттяжки 10, соединенные со скользящими опорами рукава 8 и управляемыми лебедками 6. В процессе передачи жидких грузов блок управления 16 (фиг. 4) поддерживает несущий канат 5, компенсируя относительное движение судов и качку. Длины канатов-оттяжек 10 также изменяются блоком управления пропорционально длине несущего каната 5.
Способ и система позволяют реализовать 3 различные схемы передачи грузов - 2- канатная дорога для сухих грузов, 3- (или даже 5-) канатная повышенной грузоподъемности для сухих грузов и дорога для перекачки жидкостей; передавать не только сухие грузы, но и перекачивать жидкости.
Изобретение позволяет повысить надежность передачи как сухих, так и жидких грузов с одного судна на другое на ходу в условиях качки за счет управления траекторией движения груза, которое осуществляют изменением длины и натяжения канатов, а также упростить способ передачи за счет применения управляемых лебедок с электроприводом.
Устройство для натяжения каната в судовых средствах передачи грузов в море (варианты)
Лопасть винта винтокрылого летательного аппарата
Устройство для натяжения каната в судовых средствах передачи грузов в море (варианты)
Лопасть винта винтокрылого летательного аппарата

