Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известен защищенный патентом РФ №2204145, кл. G01S 3/46, 2003, способ определения координат источника излучения, основанный на приеме его сигнала тремя антеннами, образующими ортогональные базы.
Существенным признаком аналога, совпадающим с заявляемым способом, является определение направления на источник излучения.
Известен также защищенный патентом РФ №2013785, кл. G01S 13/00, 1994, способ определения местоположения подвижных объектов, заключающийся в излучении кодированных сигналов передатчиками объектов, приеме сигналов в N пространственно разнесенных пунктах с последующей ретрансляцией их на центральный пункт обработки и измерении задержек между принятыми сигналами.
Ретрансляция сигналов на центральный пункт обработки является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению технического результата в этих аналогах, является необходимость использования достаточно сложной системы единого времени.
Известен разностно-дальномерный способ определения местоположения мобильных объектов, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта, и вычислении по ним координат мобильного объекта [Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. - М.: Радио и связь, 1994, с. 211-214].
Измерение фазовых сдвигов сигналов и вычисление по ним координат мобильного объекта является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является необходимость в использовании высокоточной шкалы единого времени на объекте навигации и сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Наиболее близким по технической сущности к заявляемому (прототипом) является обращенный разностно-дальномерный способ определения координат [Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11, с. 97-100].
Способ заключается в одновременном излучении объектом навигации и передатчиком, установленным в неподвижной точке с известными координатами, непрерывных гармонических высокочастотных сигналов и одновременном приеме указанных гармонических сигналов в нескольких опорных радионавигационных точках и формировании там из принятых сигналов сигналов разностной частоты.
Существенными признаками прототипа, совпадающими с заявляемым способом, являются излучение высокочастотных гармонических сигналов объектом навигации, прием излучаемых гармонических высокочастотных сигналов в опорных радионавигационных точках с известными координатами, формирование там сигналов разностной частоты из принятых высокочастотных сигналов.
Причинами, препятствующими достижению в способе-прототипе технического результата, обеспечиваемого изобретением, являются следующие.
Первой причиной является необходимость непрерывного излучения сигнала неподвижным передатчиком. Это ухудшает условия электромагнитной совместимости оборудования. Возникает необходимость одновременного приема и передачи двух сигналов с близкими частотами, что ухудшает условия обеспечения информационной безопасности оборудования и облегчает возможность подавления его работы. Указанные обстоятельства снижают помехозащищенность устройств, реализующих способ.
Второй причиной является то обстоятельство, что координаты неподвижного передатчика всегда определяются с некоторой погрешностью, что в конечном итоге приводит к снижению точности измерения координат объекта навигации.
Третьей причиной являются небольшие размеры области пространства, в пределах которой возможно однозначное определение координат объекта навигации с высокой точностью. Размеры этой области пространства в способе-прототипе ограничены зоной, в которой расстояния между объектом навигации и каждой из опорных радионавигационных точек должны разниться между собой не более чем на половину длины волны сигнала частоты, равной разности частот СВЧ-сигналов, излучаемых объектом навигации и передатчиком, установленным в неподвижной точке.
Технической задачей, на решение которой направлено изобретение, является повышение помехозащищенности устройств, реализующих предлагаемый способ, повышение точности определения координат объекта навигации и расширение области пространства, в пределах которой возможно однозначное определение координат объекта навигации без уменьшения точности этого определения.
Для достижения указанного технического результата в известном способе определения местоположения объекта навигации, заключающемся в излучении объектом навигации высокочастотного гармонического сигнала, приеме его в нескольких опорных радионавигационных точках с известными координатами, с объекта навигации дополнительно излучают второй высокочастотный гармонический сигнал, частота которого отличается от частоты первого высокочастотного гармонического сигнала на заданную величину, в каждой из опорных радионавигационных точек принимают этот сигнал наряду с первым, формируют из принятых сигналов сигналы разностной частоты, передают сформированные сигналы в центральный пункт обработки, где из каждого из них дополнительно формируют сигналы масштабной частоты, величина которой в n раз меньше разностной частоты, измеряют и фиксируют разности фаз сигналов разностной частоты, поступивших из разных опорных точек, а также разности фаз сформированных из них сигналов масштабной частоты, по окончании измерений результаты измерений разностей фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных точек.
Сущность изобретения поясняется чертежом, на котором приведены:
- на фиг. 1 - взаимное положение объекта навигации и трех опорных радионавигационных точек в прямоугольной системе координат 0XY;
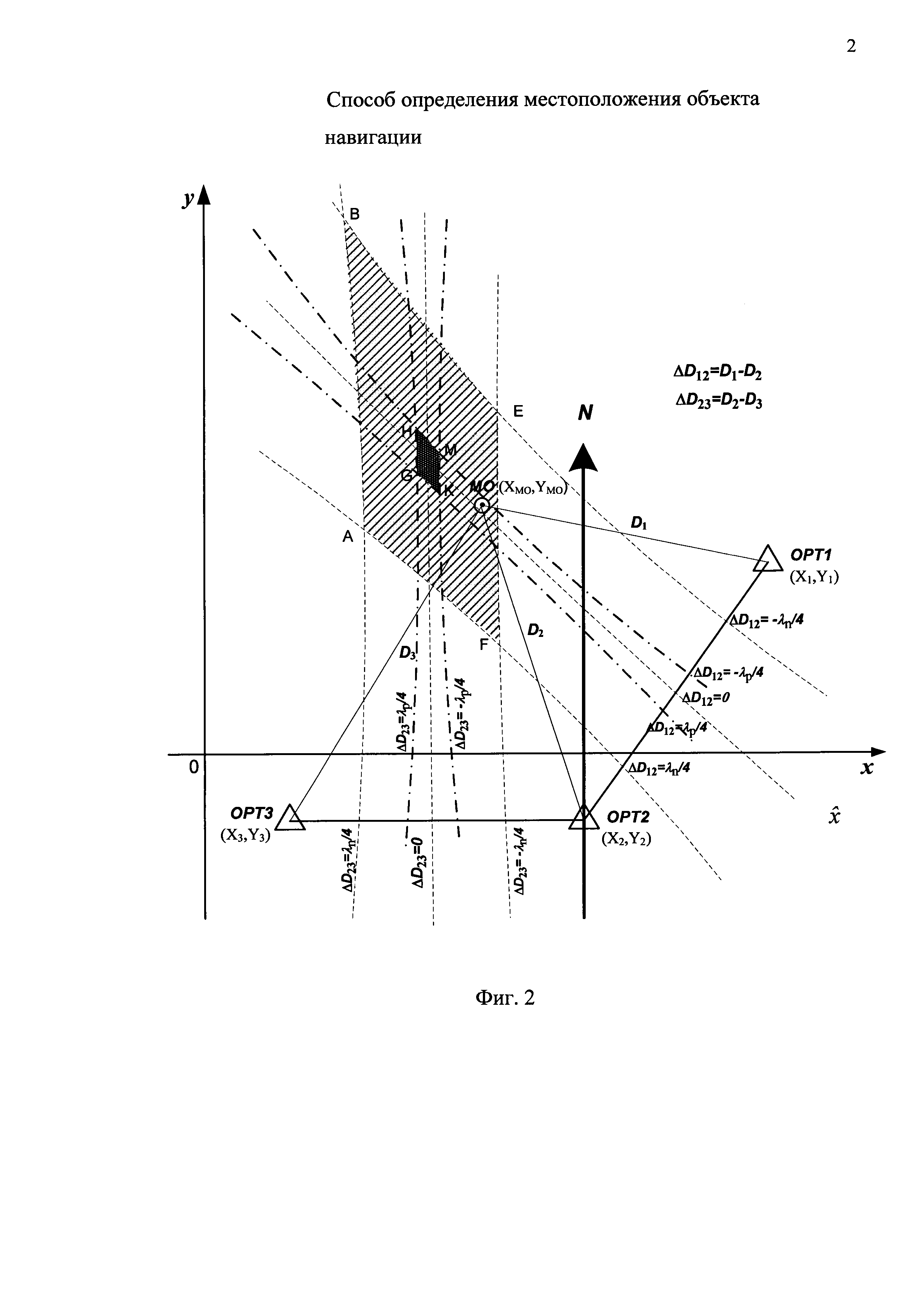
- на фиг. 2 - зона однозначного определения координат объекта навигации в привязке к этим точкам.
Функционирование способа поясняется фиг. 1, на которой показаны мобильный объект (МО) навигации, находящийся в точке с неизвестными координатами Xмо и Yмо, опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3, расположенные в точках с известными координатами X1 и Y1, Х2 и Y2 и Х3 и Y3 соответственно, а также центральный пункт обработки (ЦПО), расстояния от которого до точек ОРТ1, ОРТ2 и ОРТ3 равны соответственно R1, R2 и R3. Там же показаны расстояния D1, D2, D3 между объектом навигации и опорными радионавигационными точками.
С объекта навигации в течение заданного интервала времени излучают в направлении точек ОРТ1, ОРТ2 и ОРТЗ сигнал SMO(t), представляющий собой сумму двух гармонических высокочастотных сигналов с амплитудами А, частотами ω1 и ω2 и случайными начальными фазами φ1 и φ2:

Интервал времени, в течение которого излучается рассматриваемый сигнал, выбирается достаточным для выполнения фазовых измерений в ЦПО (подробнее об этом будет сказано ниже).
Излучаемый МО сигнал принимается в точках ОРТ1, ОРТ2 и ОРТЗ, удаленных от объекта навигации на расстояния D1, D2 и D3 соответственно. Принимаемые в указанных точках сигналы S1(t), S2(t) и S3(t) имеют следующий вид:



где С=2,9979·108 м/с - скорость распространения радиоволн в атмосфере.
В каждой из опорных радионавигационных точек из принятого сигнала Si(t)  представляющего собой сумму двух высокочастотных гармонических сигналов с частотами ω1 и ω2, формируют сигналы с разностной частотой
представляющего собой сумму двух высокочастотных гармонических сигналов с частотами ω1 и ω2, формируют сигналы с разностной частотой  (частотой биений):
(частотой биений):



Эти сигналы различаются амплитудами и временными задержками, которые определяются расстояниями D1, D2 и D3 соответственно. Сформированные сигналы разностной частоты по проводным каналам передают в ЦПО.
Таким образом, в ЦПО приходят три следующих сигнала:
1) сигнал, поступивший из ОРТ1:

где С1 - скорость распространения гармонического сигнала по проводному каналу.
Он отличается от сигнала SOPT1(t) амплитудой и дополнительным фазовым сдвигом  который обусловлен прохождением расстояния R1, разделяющего ОРТ1 и ЦПО.
который обусловлен прохождением расстояния R1, разделяющего ОРТ1 и ЦПО.
Этот сигнал можно представить в следующем виде:

где 
2) сигнал, поступивший из ОРТ2:

Он отличается от сигнала SOPT2(t) амплитудой и дополнительным фазовым сдвигом  который обусловлен прохождением расстояния R2, разделяющего ОРТ2 и ЦПО.
который обусловлен прохождением расстояния R2, разделяющего ОРТ2 и ЦПО.
Этот сигнал также можно представить в виде:

где 
3) сигнал, поступивший из ОРТ3:

Он отличается от сигнала SOPT3(t) амплитудой и дополнительным фазовым сдвигом  который обусловлен прохождением расстояния R3, разделяющего ОРТ3 и ЦПО.
который обусловлен прохождением расстояния R3, разделяющего ОРТ3 и ЦПО.
Его также можно представить в виде:

где 
В ЦПО измеряют разность фаз Δψ21=ψ2-ψ1 сигналов Sц2(t) и Sц1(t) и разность фаз Δψ23=ψ2-ψ3 сигналов Sц2(t) и Sц3(t):

Как следует из этих выражений, разности фаз Δψ21 и Δψ23 не зависят от начальных фаз излучаемых МО сигналов φ1 и φ2.
Вторые слагаемые  и
и  в выражениях для Δψ21 и Δψ23 не зависят от пространственного положения объекта навигации. Они представляют собой дополнительные фазовые сдвиги сигнала с частотой ωp при передаче их из соответствующих опорных точек в ЦПО. Эти фазовые сдвиги определяются взаимным расположением в пространстве ЦПО относительно опорных точек ОРТ1, ОРТ2 и ОРТ3, их можно рассчитать заранее и вычесть из измеренных в ЦПО разностей фаз Δψ21 и Δψ23. Это позволяет найти разности фаз сигналов с частотой ωp, формируемых в опорных точках ОРТ2 и ОРТ1 и ОРТ2 и ОРТ3, которые необходимы для нахождения разностей расстояний D2-D1 и D2-D3, используемых для вычисления координат объекта навигации.
в выражениях для Δψ21 и Δψ23 не зависят от пространственного положения объекта навигации. Они представляют собой дополнительные фазовые сдвиги сигнала с частотой ωp при передаче их из соответствующих опорных точек в ЦПО. Эти фазовые сдвиги определяются взаимным расположением в пространстве ЦПО относительно опорных точек ОРТ1, ОРТ2 и ОРТ3, их можно рассчитать заранее и вычесть из измеренных в ЦПО разностей фаз Δψ21 и Δψ23. Это позволяет найти разности фаз сигналов с частотой ωp, формируемых в опорных точках ОРТ2 и ОРТ1 и ОРТ2 и ОРТ3, которые необходимы для нахождения разностей расстояний D2-D1 и D2-D3, используемых для вычисления координат объекта навигации.
Однозначное измерение координат объекта навигации возможно только в той области пространства, обслуживаемой радионавигационной системой, для которой фазовые сдвиги Δψ21 и Δψ23 сигналов разностной частоты не выходит за пределы интервала [-π/2÷π/2]. Это условие выполняется, если в пределах указанной области пространства расстояния от любой ее точки до любой из опорных радионавигационных точек различаются между собой не более чем на половину длины волны λp сигнала разностной частоты ωp. Область пространства, для которой выполняется это условие, ограничена четырехугольником ABEF, сторонами которого являются линии положения АВ, EF, BE и AF (фиг. 2), уравнения которых имеют следующий вид:
где параметр L1 равен  для линии AF и
для линии AF и  для линии BE, а параметр L2 равен
для линии BE, а параметр L2 равен  для линии АВ и
для линии АВ и  для линии EF.
для линии EF.
Для расширения области однозначного определения координат необходимо увеличивать величину λp и, следовательно, снижать величину разностной частоты ωp.
Следует отметить, что само по себе снижение величины разностной частоты ωp, например, путем сближения частот ω1 и ω2 высокочастотных гармонических сигналов при неизменной погрешности фазовых измерений автоматически приводит к снижению точности измерения разностей расстояний и как следствие этого - к снижению точности измерения координат.
Для предотвращения снижения точности разностей расстояний фазовые измерения в предлагаемом способе осуществляют на двух частотах: непосредственно на разностной ωp и дополнительно сформированной в ЦПО масштабной ωn=ωp/n, частота которой выбирается в n раз меньше ωp. Сигналы масштабной частоты формируют для каждого из сигналов Sц1(t), Sц2(t) и Sц3(t), поступивших в центральный пункт обработки из точек ОРТ1, ОРТ2 и ОРТ3.
Учитывая, что фазовые измерения на частоте ωp однозначны только в той области пространства, для которой разности расстояний, которые соответствуют сигналам Sц1(t), Sц2(t) и Sц3(t), не превосходят половину длины волны сигнала разностной частоты, фактические разности фаз  для любых двух сигналов на частоте ωp определяют по формулам:
для любых двух сигналов на частоте ωp определяют по формулам:
где Δψp и Δψn - разности фаз сигналов, измеренные в ЦПО на частотах ωp и ωn;
int(x) - целая часть аргумента x.
Коэффициент k и фактическую разность фаз  вычисляют для сигналов каждой из пар ОРТ по измеренным в ЦПО разностям фаз Δψp и Δψn.
вычисляют для сигналов каждой из пар ОРТ по измеренным в ЦПО разностям фаз Δψp и Δψn.
Ниже приведен алгоритм пересчета результатов фазовых измерений в координаты объекта навигации. Этот алгоритм применим для локальных навигационных систем, когда допустимо пренебречь сферичностью Земли, а скорость распространения радиоволн в зоне действия навигационной системы можно считать постоянной.
Исходными данными для расчета являются:
- разность фаз Δψn21 сигналов, измеренная в ЦПО на частоте ωn для радионавигационных точек ОРТ1 и ОРТ2;
- разность фаз Δψn23 сигналов, измеренная в ЦПО на частоте ωn для радионавигационных точек ОРТ2 и ОРТ3;
- разность фаз Δψp21 сигналов, измеренная в ЦПО на частоте  для радионавигационных точек ОРТ1 и ОРТ2;
для радионавигационных точек ОРТ1 и ОРТ2;
- разность фаз Δψp23 сигналов, измеренная в ЦПО на частоте для радионавигационных точек ОРТ2 и ОРТ3.
Кроме того, в расчете используют следующие константы:
- значение первой высокой частоты ω1;
- значение второй высокой частоты ω2;
- скорость распространения радиоволн в атмосфере С;
- скорость распространения радиосигнала по проводному каналу С1,
- расстояние R21 между второй ОРТ2 и первой ОРТ1 опорными радионавигационными точками;
- расстояние R23 между третьей ОРТ3 и второй ОРТ2 опорными радионавигационными точками;
- расстояния R1, R2 и R3 между ЦПО и ОРТ1, ОРТ2 и ОРТ3 соответственно;
- коэффициент n превышения разностной частоты над масштабной.
Порядок расчета следующий.
1. Вычисляют разностную  и масштабную
и масштабную  частоты.
частоты.
2. Вычисляют разности фазовых сдвигов сигналов разностной частоты ωp при распространении их от опорных радионавигационных точек к ЦПО:
3. Вычисляют величины
4. Вычисляют фактические разности фаз:
5. Решают навигационную задачу - определяют координаты объекта навигации:
а) вычисляют разности расстояний от объекта навигации до опорных точек
Здесь D1, D2, D3 - расстояния от объекта навигации (МО) до первой ОРТ1, второй ОРТ2 и третьей ОРТ3 опорных радионавигационных точек в соответствии с фиг. 1;
б) ΔD21 и ΔD23 нормируют по длинам базовых линий и вычисляют параметр γ:

в) определяют постоянные параметры:
a=α21-α23; b=γΔd23-Δd21,
где α21 - угол между осью  и базовой линией R21;
и базовой линией R21;
α23 - угол между осью и базовой линией R23.
г) каким-либо из численных итерационных методов решают уравнение для вычисления угла β23 между базовой линией R23 и направлением на объект навигации:
cos(a-β23)-γcosβ23=b;
д) вычисляют расстояние D2 от точки ОРТ2 до объекта навигации
е) вычисляют координаты объекта навигации в местной прямоугольной системе координат, начало которой находится в точке ОРТ2:
При необходимости координаты объекта навигации пересчитывают в исходную прямоугольную систему координат
То обстоятельство, что в предлагаемом способе измерения разности фаз выполняют на двух частотах разностной ωp и масштабной ωn, частота которой в n раз меньше ωp, позволяет сделать вывод, что предлагаемый способ позволяет значительно (примерно в n2 раз) расширить область пространства, в которой возможно однозначное определение координат объекта навигации, по сравнению с прототипом и одновременно не ухудшить точность их измерения.
В предлагаемом способе для такого расширения частота ωn выбирается достаточно низкой (исходя из размеров требуемой области определения координат), а частота ωp достаточно высокой (исходя из требуемой точности их определения).
Для примера на фиг. 2 показаны две заштрихованные области пространства, ограниченные четырехугольниками ABEF и GNMK соответственно, в которых возможно однозначное определение координат объекта навигации на частотах ωn и ωp соответственно. Четырехугольник ABEF соответствует частоте ωn, примерно в пять раз меньшей, чем четырехугольник GNMK, соответствующий частоте ωp.
В способе-прототипе фазовые измерения выполняются только на частоте биений ωp. Ее в принципе можно выбрать достаточно низкой, но это приведет к снижению точности измерения координат, которая и без того снижена из-за погрешности определения координат неподвижного передатчика.
В предлагаемом же способе фазовые измерения осуществляются не только на частоте ωp, но и на частоте ωn, которая в n раз ниже ωp. При этом фазовые измерения на частоте ωn используются лишь для исключения неоднозначности фазовых измерений, а для решения навигационной задачи используют более точные вычисленные значения фактических разностей фаз  на частоте ωр. По сравнению с прототипом точность определения координат в предлагаемом способе не снижается, а повышается за счет исключения погрешности определения координат неподвижного передатчика.
на частоте ωр. По сравнению с прототипом точность определения координат в предлагаемом способе не снижается, а повышается за счет исключения погрешности определения координат неподвижного передатчика.
Предлагаемый способ не требует непрерывного излучения второго высокочастотного сигнала, что исключает связанное с этим передатчиком снижение помехозащищенности устройств, реализующих способ.
Техническая реализация способа не вызывает затруднений.
В качестве примера реализации рассмотрим реализацию предлагаемого способа для построения локальной навигационной системы для управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов: на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс). Для реализации системы может быть выбран диапазон частот 1200-1400 МГц. Зона действия локальной навигационной системы может составлять несколько сотен метров. Формирование двух гармонических сигналов (основного и дополнительного) на объекте навигации можно реализовать на основе двух синтезаторов частоты, синхронизируемых общим опорным генератором и сумматора. В качестве синтезаторов частоты можно применить, например, микросхемы типа ADF4360-5, в которых предусмотрена возможность изменения частоты путем подачи соответствующих цифровых кодов на входы управления и которые позволяют сформировать два высокостабильных гармонических сигнала с разносом частот от (0,1-100) МГц, в качестве опорного генератора термостабилизарованный кварцевый генератор типа NT3225SA.
Для приема гармонических сигналов в опорных радионавигационных точках можно использовать интегральные СВЧ-усилители - микросхемы типа SPF5122Z. В качестве узла формирования сигнала разностной частоты можно использовать смеситель на транзисторе BFP620, в качестве нагрузки которого служит фильтр нижних частот с частотой среза 10 МГц.
Передачу сигналов разностной частоты из опорных радионавигационных точек в центральный пункт обработки можно реализовать по проводным каналам либо по радиоканалам с разделением их по частоте.
Нормирование принятых в центральном пункте обработки сигналов по амплитуде осуществляется путем амплитудного ограничения принятых сигналов разностной частоты с помощью логарифмических усилителей AD8309.
Формирование сигналов масштабной частоты реализуется путем деления по частоте сигналов разностной частоты, например, с помощью делителей частоты на микросхемах К561ИЕ20 или К561ИЕ20.
Измерение разности фаз сигналов разностной частоты в центральном приемном пункте может быть реализовано с помощью фазового детектора на микросхеме SYPD-1.
Аналоговые сигналы с выхода фазового детектора подаются через аналого-цифровые преобразователи на входные порты микропроцессора типа STM, в котором реализуется решение навигационной задачи по приведенному выше алгоритму.
Способ может найти применение для построения локальных навигационных систем для управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных транспортных средств на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс).
Способ определения местоположения объекта навигации, заключающийся в излучении объектом навигации высокочастотного гармонического сигнала, приеме его в нескольких опорных радионавигационных точках с известными координатами, отличающийся тем, что с объекта навигации в течение заданного интервала времени дополнительно одновременно с первым излучают второй высокочастотный гармонический сигнал, частота которого отличается от частоты первого высокочастотного гармонического сигнала на заданную величину, в каждой из опорных радионавигационных точек принимают этот сигнал наряду с первым, формируют из принятых сигналов сигналы разностной частоты, передают эти сигналы в центральный пункт обработки, где из каждого из них дополнительно формируют сигналы масштабной частоты, в n раз меньшей разностной частоты, измеряют и фиксируют разности фаз сигналов разностной частоты, поступивших из разных опорных точек, а также разности фаз дополнительно сформированных из них сигналов масштабной частоты, интервал времени излучения высокочастотных гармонических сигналов выбирают достаточным для осуществления фазовых измерений, а сигналы масштабной частоты используют для исключения неоднозначности измерений разностей фаз сигналов разностной частоты, по окончании измерений результаты измерений разностей фаз сигналов разностной и масштабной частот пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта обработки и опорных радионавигационных точек.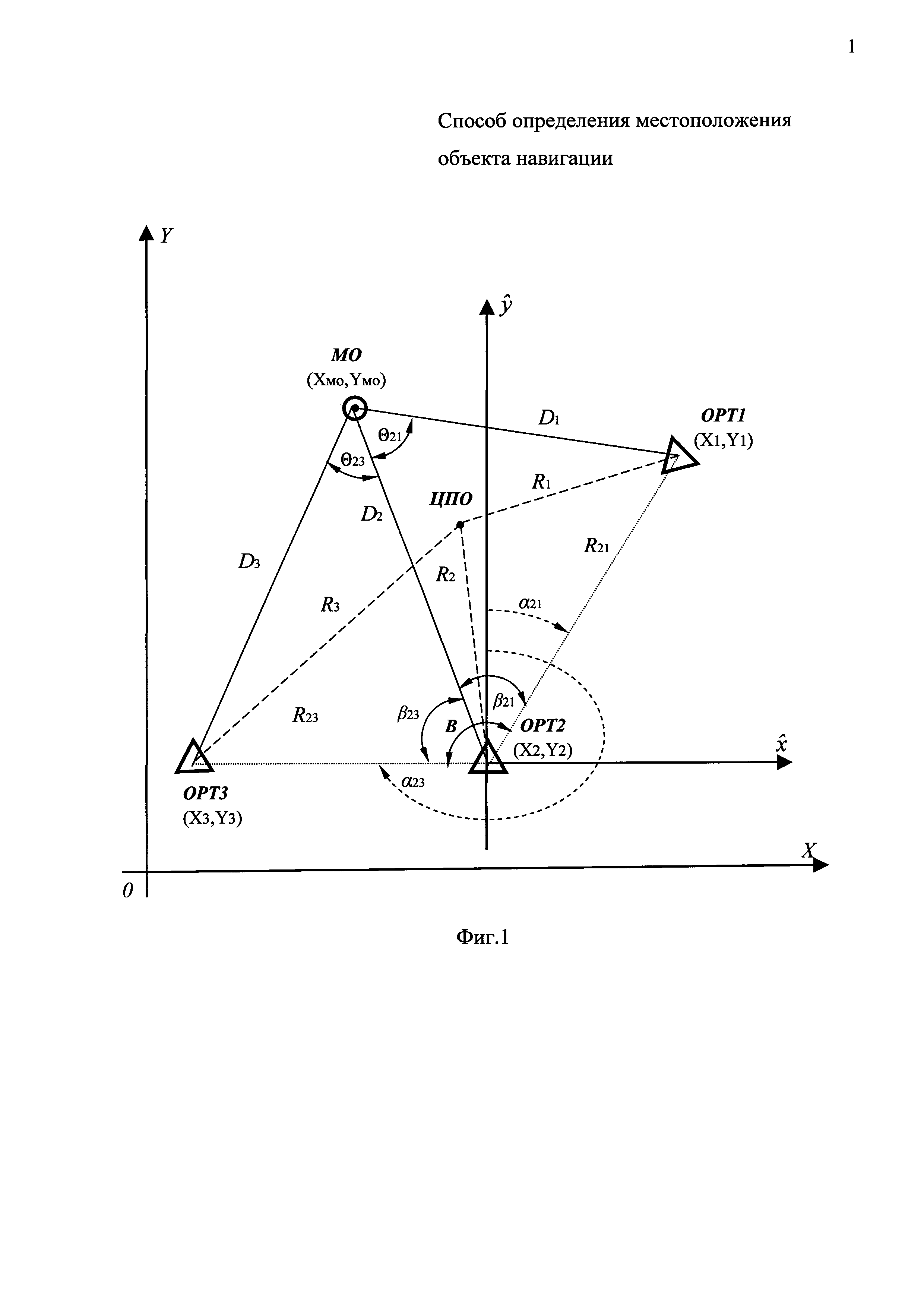
Фазовый разностно-дальномерный способ определения местоположения объекта навигации
Способ управления подвижным объектом
Способ определения местоположения объектов для систем локальной навигации
Фазоразностный способ определения местоположения объекта навигации
Фазоразностная радионавигационная система с широкополосным сигналом
Широкополосная фазоразностная локальная радионавигационная система
Локальная фазовая разностно-дальномерная радионавигационная система
Способ определения местоположения объекта навигации
Корабельная станция импульсных и маскирующих помех
Фазовый разностно-дальномерный способ определения местоположения объекта навигации
Способ управления подвижным объектом
Способ определения местоположения объектов для систем локальной навигации
Фазоразностный способ определения местоположения объекта навигации
Фазоразностная радионавигационная система с широкополосным сигналом
Широкополосная фазоразностная локальная радионавигационная система
Локальная фазовая разностно-дальномерная радионавигационная система
Способ определения местоположения объекта навигации
Корабельная станция импульсных и маскирующих помех
Способ зажигания двигателя автомобиля

