Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОЕЗДОВ С ПРОВЕРКОЙ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ДОСТОВЕРНОСТИ ОЦЕНКИ ПОЛОЖЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к определению местонахождения поездов и, в частности, к системе, разработанной для оценки положения поезда и для проверки в режиме реального времени достоверности оценки положения.
Уровень техники
Как известно, в железнодорожной отрасли заметно ощущается потребность в разработке систем установки места положения, которые имели бы повышенную надежность, для управления поездами при движении, для гарантирования безопасности железнодорожного сообщения. В области аэронавтики такая потребность была удовлетворена, благодаря использованию Спутниковых систем дифференциальных поправок (SBAS), которые обеспечивают возможность повышения точности оценки положения, и, следовательно, могут использоваться для поддержки навигации в воздухе. Кроме того, SBAS разработаны также для подачи сигнала "безопасность для жизни" и, следовательно, могут использоваться для поддержки систем управления воздушным движением.
ИЗВЕСТНЫЕ СИСТЕМЫ SBAS ПРЕДСТАВЛЯЮТ СОБОЙ:
Европейскую Геостационарную дополнительную навигационную систему (EGNOS), разработанную для обеспечения услуги улучшения точности оценки положения на европейском континенте и в Северной Африке (в частности, на севере Марокко, в Тунисе, в Алжире и в Ливии);
Широкозонную систему дифференциальных поправок (WAAS), разработанную в Соединенных Штатах Америки и предназначенную для обеспечения обслуживания для улучшения точности оценки положения в обширной области Североамериканского континента; и
Многофункциональную спутниковую систему дифференциальных поправок (MSA), разработанную в Японии, и предназначенную для обеспечения обслуживания по улучшению точности оценки положения в обширной области азиатского континента.
Когда все упомянутые выше SBAS будут полностью работоспособными, самолет, который, например, взлетает в Нью-Йорке, направляясь в Лондон и затем в Нью-Дели, всегда остается в зоне охвата таких SBAS.
В частности, SBAS гарантируют точность порядка двух метров при оценке положения. Кроме того, SBAS гарантируют также надежность данных, принимаемых из Глобальных систем навигации (GPS), и обеспечивают намного более точный расчет высоты, что в будущем также может использоваться для аэронавигации.
Более подробно, SBAS использовали для подачи информации, которая обеспечивает улучшение оценки положения на основе сигналов, принимаемых из GPS и для подачи сигналов "безопасность для жизни":
множество геостационарных спутников (то есть находящихся в фиксированных положениях относительно поверхности Земли, по сравнению со спутниками GPS, которые движутся по орбите);
множество наземных станций, которые соответствующим образом географически привязаны, в них предусмотрено соответствующее средство опорного времени (высокоточные часы), и которые выполнены с возможностью определения задержек сигналов, передаваемых спутниками GPS, из-за ионизации тропосферы; и
множество базовых станций обработки данных.
Более подробно, SBAS, для определения ошибок при оценке положения на основе сигналов, принимаемых из GPS, работают таким образом, как описано ниже. Наземные станции детектируют ошибку данных, передаваемых спутниками GPS (которые могут быть, по большей части, связаны с ионизацией в самых нижних слоях атмосферы). С этой целью, наземные станции сравнивают свое собственное положение, рассчитанное на основе сигналов, принятых из спутников GPS, с данными орбит спутников GPS и с соответствующими сертифицированными положениями. Как известно, GPS принимают основные расчеты их собственного положения по задержке, с которой они принимают сигнал из спутников GPS. Поскольку в каждой наземной станции известно соответствующее точное положение и положения спутников GPS, из которых она получила сигналы GPS (упомянутые положения определяют не на основе принятых сигналов, а скорее на основе данных орбит самих спутников), каждая наземная станция, следовательно, выполнена с возможностью легко определять ошибку, связанную с распространением сигналов GPS через атмосферу. Каждая наземная радиостанция, следовательно, может генерировать, на основе рассчитанных ошибок, соответствующую решетку окружающих точек и детектировать допустимую погрешность для каждой из этих точек, расширяя, таким образом, область, в которой рассчитанные ошибки GPS являются действительными. Следовательно, таким образом, каждая наземная станция определяет соответствующую модель ошибки, которая является действительной для соответствующей области компетентности. Данные, генерируемые наземными станциями, затем передают, по меньшей мере, в одну базовую станцию обработки данных, которая генерирует очень плотную сетку корректирующих коэффициентов. Если это соответствует, на практике обрабатывают большое количество точек известного положения, для каждой из которых обрабатывают данные коррекции для сигнала, принятого из каждого спутника GPS. Эти данные обновляют в режиме реального времени, с учетом того, что условия распространения сигнала GPS через атмосферу, очевидно, изменяются в соответствии с условиями самой атмосферы. Эти корректирующие факторы затем передают в спутники SBAS так, что они могут быть, в конечном итоге, переданы на землю, используя ту же частоту, что и сигналы GPS (то есть, частоту L1), и затем приняты соответствующими терминалами пользователя. Терминал, который принимает сигналы SBAS, выбирает данные, действительные для точек сетки, находящейся ближе к нему, применяет их для спутников, которые он принимает в этот момент времени, и использует их для расчетов своего собственного положения.
В железнодорожной отрасли использование SBAS не является таким простым. Фактически, услуга подачи сигналов "безопасности для жизни" рассматривалась, преимущественно, как процедуры в аэронавтике, которые основательно отличаются от процедур на железной дороге. Фактически, процедуры на железной дороге начинаются с той идеи, что каждым поездом можно управлять в каждый момент времени вдоль его маршрута, определяя в режиме реального времени, на основе состояния поезда и уровня знаний о положении упомянутого поезда, как скорость движения, так и возможные остановки в случае, когда требуется выполнить процедуры по безопасности. Более сложное развитие этих процессов управления движением поездов представлено в Европейской системе управления движением железнодорожного транспорта (ERTMS) и в Европейской системе управления движением поездов (ETC).
В частности, интегрированная система, ERTMS-ETC, представляет собой усовершенствованную систему для администрирования, управления, защиты и передачи сигналов железнодорожного сообщения, разработанную для замены множества взаимно несовместимых систем, связанных с движением и обеспечением безопасности различных европейских железных дорог, для гарантирования функциональной совместимости поездов в различных европейских железнодорожных сетях и максимального уровня рабочих характеристик европейских железнодорожных сетей, как для высокоскоростных, так и для имеющих набольший коммерческий интерес.
ERTMS-ETC состоит из разного оборудования, которое предназначено для осуществления упомянутых выше функций, и характеризуется тремя разными функциональными уровнями, в частности, первым функциональным уровнем, вторым функциональным уровнем и третьим функциональным уровнем. Определение каждого функционального уровня зависит от того, как оборудована железнодорожная линия, и от того, как выполняют обмен информацией между поездом и станциями мониторинга.
На первом уровне авторизацию ERTMS-ETC для движения и соответствующую информацию о маршруте передают в поезд и непрерывно отображают в кабине машиниста, используя бализы (точечные путевые датчики), называемые "евробализами", которые распределены вдоль железнодорожных путей, которые обеспечивают собственное определение положения поезда и передают условия на маршруте, и все они могут быть интегрированы следующей последовательностью точек передачи, которые передают непрерывно в поезд информацию и соответствующие данные управления движением и положением.
В частности, современные поезда оборудованы бортовыми одометрами, которые выполнены с возможностью измерения скорости поездов, на которых они установлены, и для оценки положения упомянутых поездов путем интегрирования измеряемой скорости. На первом уровне ERTMS-ET Севробализы используются для калибровки бортовых одометров, то есть, для корректировки оценок положения, передаваемого бортовыми одометрами на основе сертифицированных положений, передаваемых евробализами.
ERTMS-ETC первого уровня подают бортовые сигналы, которые могут быть добавлены к традиционным системам сигнализации, в настоящий момент установленным на железнодорожных линиях, оставляя последние работоспособными для циркуляции обычных поездов.
Фиксированные передающие бализы (евробализы) передают, через соответствующее кодирование, информацию, предоставляемую фиксированными линейными сигналами и подают в бортовые устройства поезда необходимую авторизацию для движения. Компьютер на борту поездов обрабатывает значения максимальной скорости и кривые торможения на основе данных, принятых из евробализов. Для того чтобы обеспечить возможность получения необходимой информации из наземных бализов, необходимую авторизацию, в частности, необходимую авторизацию для последующего движения, необходимо, чтобы поезд обращался к упомянутымбализам, проходя мимо них. Информацию, относящуюся к достоверности поезда и для соответствующего определения положения, детектируют через схемы рельсового пути. Путем установки дополнительных евробализов (Евроконтуров) между сигналом начала протяженности и сигналом конца протяженности пути, возможно получить достаточно непрерывную передачу информации. Информация может быть передана при проходе локомотива через индуктивное средство или с помощью радиоустройства.
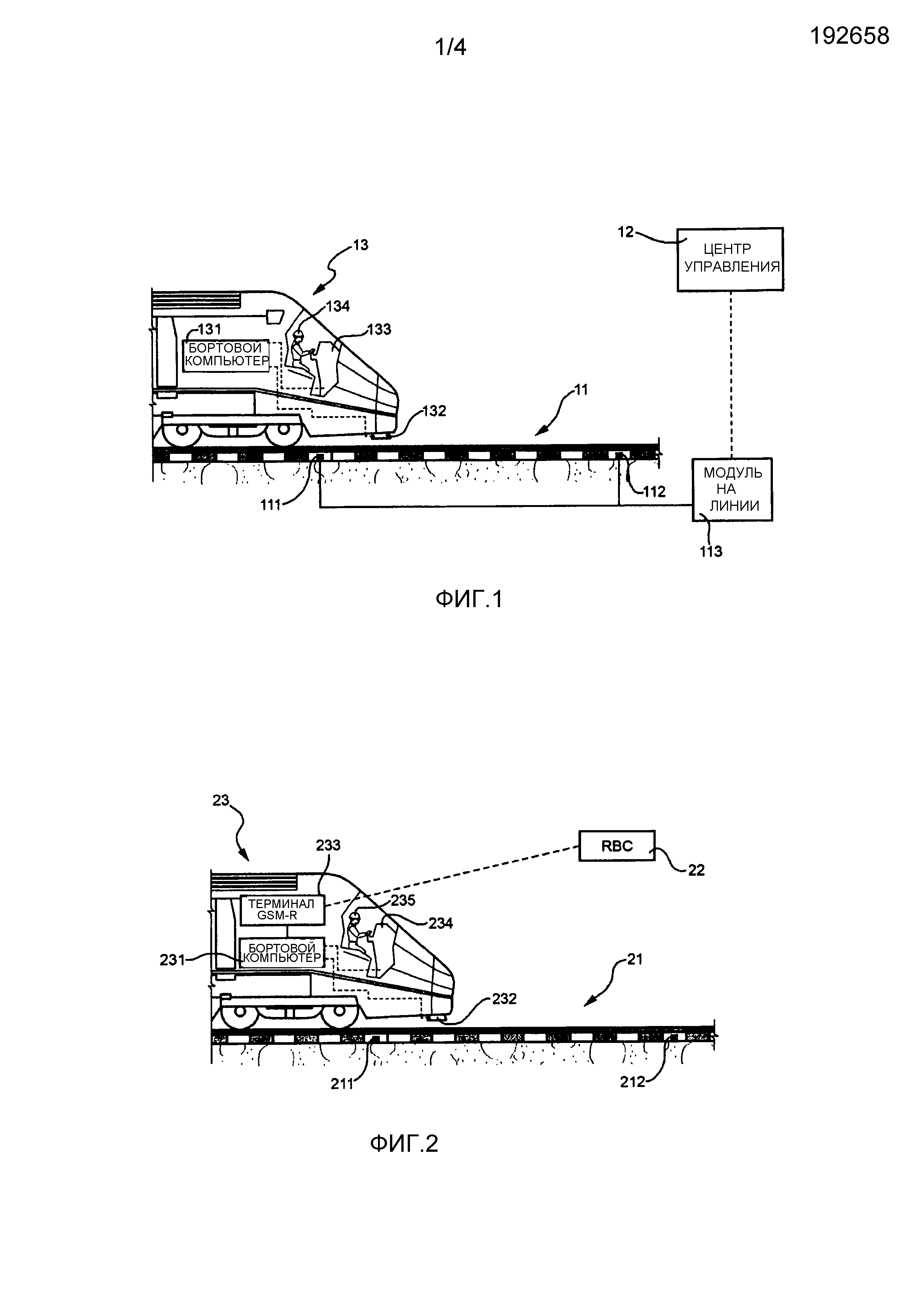
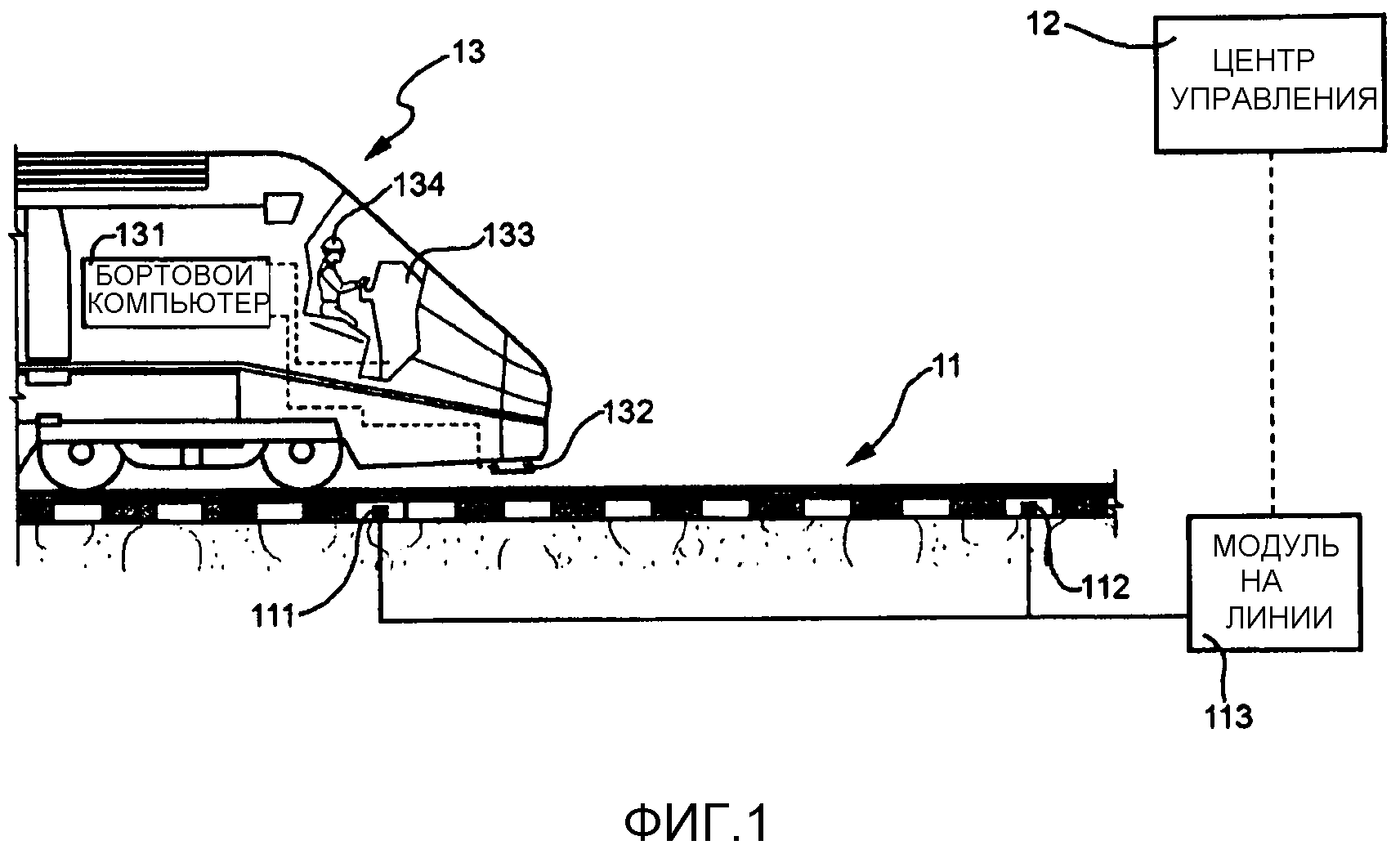
В этом отношении, на Фиг. 1 показан сценарий примера, в котором работает первый уровень ERTMS-ETC.
В частности, на Фиг. 1 схематично иллюстрируется:
участок железнодорожной линии (обозначенный в целом, как 11), который содержит два евробализа (обозначенные, соответственно, номерами 111 и 112), которые соединены с модулем на линии (обозначен 113), который, в свою очередь, дистанционно соединен с центром управления (обозначен 12); и
поезд (в целом обозначен, как 13), который проходит вдоль участка железнодорожной линии 11, и на борту которого установлен бортовой компьютер (обозначен, как 131), который соединен с приемником (обозначен, как 132) и с панелью управления (обозначена 133), выполненной с возможностью подачи информации машинисту (обозначен 134) поезда 13.
Более подробно, центр 12 управления передает в модуль 113 на линии информацию, относящуюся к участку железнодорожной линии 11, такую, как, например, авторизация для движения поездов, замедление их скорости движения и максимально разрешенная скорость. Модуль 113 на линии подает в евробализы 111 и 112 информацию, принятую из центра 12 управления вместе с другой информацией, передаваемой фиксированными системами передачи сигналов (не показаны на Фиг. 1 для простоты) установленными вдоль участка железнодорожной линии 11. Каждый из двух евробализов 111 и 112 географически привязан, то есть, знает соответствующее точное положение и передает при проходе поездов через индуктивное средство или по радио, соответствующее положение, вместе с информацией, принятой из модуля 113 на линии. Когда поезд 13 проходит через евробализы 111 и 112, приемник 132 принимает информацию, передаваемую упомянутыми евробализами 111 и 112, и подает ее в бортовой компьютер 131. Бортовой компьютер 131 отображает на панели 133 управления информацию, принятую через приемник 132, вместе с другой информацией (например, текущим профилем торможения поезда 13), получаемой в результате обработки упомянутой принятой информации и другой информации, относящейся к поезду 13 (например, скорость, вес и длина поезда 13).
Кроме того, бортовой компьютер 131 соединен с бортовым одометром (не показан на Фиг. 1 для простоты) поезда 13, для приема последних оценок положения поезда 13. Бортовой компьютер 131 корректирует упомянутые оценки на основе положений, принятых из евробализов 111 и 112. Бортовой компьютер 131 отображает на панели управления 133 оценки положения, передаваемые бортовым одометром, когда для него доступны точные положения, передаваемые евробализами 111 и 112, в то время как, когда он принимает точные положения, передаваемые евробализами 111 и 112, он отображает упомянутые точные положения на панели 133 управления.
В этом отношении, вместо этого, ERTMS-ETC второго уровня обеспечивает администрирование расстояния между поездами, используя радиосвязь между поездами и базовую станцию, называемую "Центром Радиоблока" (RBC), которая, зная состояние линии и состояние других поездов, непрерывно передает информацию о поездах, относящуюся к линии (такую как, например, авторизация движения поездов, снижение их скорости, и максимально разрешенные скорости), используя соединения на основе международного стандарта мобильной телефонии, для передачи данных на железной дороге "Глобальной системы мобильной связи - железной дороги" (GSM-R). Поезда, таким образом, могут определять свой собственный профиль скорости также на основе их собственных характеристик веса и торможения. Система своевременно вмешивается в случае возможных рисков для безопасности.
В частности, ERTMS-ETC второго уровня представляет собой систему для передачи сигналов и защиты поезда на основе радиопередачи цифровых данных. В кабине управления движением поездов, на специально предусмотренных панелях управления отображается информация, относящаяся к маршруту, и авторизация движения поездов, принимаемая непосредственно из RBC. Положения поездов, направление движения, вместе со всей другой необходимой информацией, передают автоматически в поезда в RBC через заданные интервалы. Движение поездов, таким образом, постоянно отслеживается RBC.
В ERTMS-ETC второго уровня евробализы исполняют только функцию опорных точек для управления и коррекции положения поезда вдоль линии. Бортовой компьютер постоянно обрабатывает переданные данные и разрешенную максимальную скорость.
В этом отношении, на Фиг. 2 показан сценарий примера, в котором работает ERTMS-ETC второго уровня.
В частности, на Фиг. 2 схематично иллюстрируется:
участок железнодорожной линии (в целом обозначенный, как 21), который содержит два евробализа (обозначенные, соответственно, как 211 и 212);
RBC (обозначенный, как 22); и
поезд (обозначенный в целом, как 23), который проходит участок железнодорожной линии 21, и на борту которого установлен бортовой компьютер (обозначенный, как 231), который соединен с приемником (обозначен, как 232), с терминалом 233 GSM-R, который выполняет обмен информацией с RBC 22, и c панелью управления (обозначенной, как 234), выполненной с возможностью подавать информацию машинисту (обозначен, как 235) поезда 23.
Подробно RBC 22 передает в терминал 233 GSM-R информацию, относящуюся к участку железнодорожной линии 21, такую как, например, авторизация движения поездов, их замедление и максимально разрешенные скорости. Терминал 233 GSM-R подает информацию, принятую из RBC 22, в бортовой компьютер 231. Бортовой компьютер 231 отображает на панели 234 управления информацию, принятую из RBC 22, через терминал 233 GSM-R, вместе с другой информацией (например, текущим профилем торможения поезда 23), полученной в результате обработки упомянутой информации, принятой из RBC 22, и другой информации, относящейся к поезду 23 (например, скорость, вес и длина поезда 23).
Кроме того, каждый из двух евробализов 211 и 212 является географически привязанным, то есть, для него известно соответствующее точное местоположение, и передает при проходе поездов через индуктивное средство или по радио, соответствующее местоположение. Когда поезд 23 проходит через евробализы 211 и 212, приемник 232 принимает положения, переданные упомянутыми евробализами 211 и 212, и подает их в бортовой компьютер 231.
Кроме того, бортовой компьютер 231 соединен с бортовым одометром (не показан на Фиг. 2 для простоты) поезда 23, для приема из последнего оценок положения поезда 23. Бортовой компьютер 231 корректирует упомянутые оценки на основе положений, принятых из евробализов 211 и 212. Бортовой компьютер 231 отображает на панели 234 управления оценки положения, передаваемые бортовым одометром, когда он не имеет доступные точные положения, подаваемые евробализами 211 и 212, тогда как, когда он принимает точные положения, передаваемые евробализами 211 и 212, он отображает упомянутые точные положения на панели 234 управления.
В конечном итоге, положение 23 поезда, направление движения поезда 23, вместе со всей другой необходимой информацией, автоматически передают с помощью бортового компьютера 231 в RBC 22 через терминал 233 GSM-R. Таким образом, RBC 22 отслеживает движение поезда 23.
При этом, все еще выполняют изучение ERTMS-ETC третьего уровня, поскольку некоторые аспекты, относящиеся к безопасности поездов, все еще требуют более глубокого изучения. В широком смысле, ERTMS-ETC третьего уровня предусматривает устранение большого количества наземных устройств и передачу определения местоположения и управления достоверностью поездов в специально разработанные бортовые передающие устройства, которые постоянно выполняют обмен данными с центром для обработки и управления данными в отношении движения поездов на определенном участке. Кроме того, ERTMS-ETC третьего уровня превосходит концепцию участков из фиксированных блоков, вводя участки из динамических блоков, не смоделированные в заранее определенном физическом пространстве, но формируемые в соответствии с требованиями циркуляции и с возможностями, которые дает система радиопередач.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение было разработано для удовлетворения потребности в надежных системах определения местоположения для управления поездами при движении и, в соответствии с этим, было проведено всестороннее изучение, нацеленное на разработку новой системы определения местоположения поездов, которая позволяет удовлетворить упомянутую потребность в железнодорожной отрасли и гарантирует безопасность железнодорожного движения.
Цель настоящего изобретения, следовательно, состоит в обеспечении системы определения местоположения поездов, которая позволяет обеспечить достоверное определение местоположения и гарантировать безопасность железнодорожного движения.
Упомянутая выше цель достигается с помощью настоящего изобретения, поскольку оно относится к спутниковому терминалу и системе определения местоположения поездов в соответствии с тем, что определено в приложенной формуле изобретения.
В частности, спутниковый терминал, в соответствии с настоящим изобретением, разработан с возможностью установки на борту поезда, выполнен с возможностью приема навигационных сигналов от спутников, принадлежащих одной или более спутниковым системам навигации, и отличающийся тем, что, кроме того, он выполнен с возможностью:
сохранения данных географической привязки железнодорожного маршрута поезда; и
определения, на основе сохраненных данных географической привязки и принятых сигналов навигации, положения поезда вдоль железнодорожного маршрута и уровня достоверности, связанного с упомянутым расчетным положением.
Подробно уровень достоверности обозначает максимальную ошибку, связанную с рассчитанным положением.
В частности, спутниковый терминал выполнен с возможностью:
выделения из принятых навигационных сигналов данных местоположения, соответствующих спутникам, которые передали упомянутые навигационные сигналы;
определения, на основе сохраненных данных географической привязки и данных местоположения, соответствующих, по меньшей мере, двум спутникам, положения поезда вдоль железнодорожного маршрута; и
определения, на основе сохраненных данных географической привязки и данных местоположения, соответствующих, по меньшей мере, трем спутникам, уровня достоверности, связанного с упомянутым расчетным положением.
Предпочтительно, спутниковый терминал выполнен с возможностью:
расчета, для каждого набора из трех спутников, из которых принимают навигационные сигналы, соответствующего положения, связанного с железнодорожным маршрутом, на основе сохраненных данных географической привязки и данных местоположения, соответствующих упомянутым трем спутникам, и соответствующего уровня защиты на основе упомянутого соответствующего положения, привязанного к железнодорожному маршруту, и данных местоположения, соответствующих упомянутым трем спутникам, упомянутый соответствующий уровень защиты обозначает максимальную ошибку, связанную с упомянутым соответствующим положением, привязанным к железнодорожному маршруту;
выбора набора из трех спутников в соответствии с критериями выбора, на основе, по меньшей мере, рассчитанных уровней защиты; и
определения положения поезда вдоль железнодорожного маршрута и уровень достоверности, связанный с упомянутым положением на основе, соответственно, положения, привязанного к железнодорожному маршруту, и уровня защиты, рассчитанного для выбранного набора из трех спутников.
В частности, каждое положение, привязанное к железнодорожному маршруту, рассчитанное для набора из трех спутников, содержит:
соответствующую первую координату, обозначающую среднюю высоту железнодорожного маршрута, рассчитанную на основе данных географической привязки;
соответствующую вторую координату, равную нулю; и
соответствующую третью координату, соответствующую криволинейной абсциссе, связанной с железнодорожным маршрутом и рассчитанной на основе сохраненных данных географической привязки и данных местоположения, соответствующих упомянутым трем спутникам.
Подробнее, для каждого положения, привязанного к железнодорожному маршруту, рассчитанному для набора из трех спутников,
соответствующая первая координата соответствует первой опорной оси, по существу, вертикальной относительно поверхности Земли; и
соответствующая вторая координата и соответствующая третья координата соответствуют, соответственно, второй опорной оси и третьей опорной оси, соответственно, которые являются взаимно перпендикулярными и находятся в плоскости, касательной к поверхности Земли.
Предпочтительно, спутниковый терминал выполнен с возможностью расчета для каждого набора из трех спутников, из которых он принимает навигационные сигналы:
соответствующего положения, связанного с железнодорожным маршрутом, и соответствующего смещения по времени, связанного с сигналами навигации, принимаемыми из упомянутых трех спутников, на основе сохраненных данных географической привязки и данных местоположения, соответствующих упомянутым трем спутникам;
соответствующей средней ошибки, связанной со второй координатой соответствующего положения, привязанного к железнодорожному маршруту на основе первой и третьей координат упомянутого соответствующего положения, привязанного к железнодорожному маршруту, соответствующего смещения по времени, и данных местоположения, соответствующих упомянутым трем спутникам; и
соответствующего уровня защиты на основе соответствующей средней ошибки, таким образом, что максимальная ошибка, связанная с упомянутым соответствующим положением, привязанным к железнодорожному маршруту, меньше, чем упомянутый соответствующий уровень защиты.
В частности, спутниковый терминал выполнен с возможностью расчета для каждого набора из трех спутников, из которых он принимает навигационные сигналы:
соответствующей дисперсии, связанной с соответствующей средней ошибкой, на основе заранее определенного распределения вероятности; и
соответствующего уровня защиты на основе кратного соответствующей дисперсии.
Таким образом, спутниковый терминал выполнен с возможностью выбора набора из трех спутников, для которых был рассчитан минимальный уровень защиты.
В качестве альтернативы, спутниковый терминал выполнен с возможностью:
расчета, для каждого набора из трех спутников, из которых он принимает навигационные сигналы, соответствующего индекса снижения точности на основе соответствующего положения, привязанного к железнодорожному маршруту, и данных местоположения, соответствующих упомянутым трем спутникам, и соответствующего индекса надежности на основе упомянутого соответствующего индекса снижения точности и соответствующего уровня защиты; и
выбора набора из трех спутников на основе рассчитанных индексов надежности.
Кроме того, система определения местоположения поездов, в соответствии с настоящим изобретением, разработанная для установки на борту поезда, содержит упомянутый выше спутниковый терминал и выполнена с возможностью:
получения от одометра, установленного на борту поезда, текущей оценки положения, передаваемой упомянутым одометром;
приема точных положений поезда из системы сигнализации, установленной вдоль железнодорожного маршрута;
если она принимает точное положение поезда от системы сигнализации, подачи в качестве текущего положения поезда упомянутого точного положения и коррекции текущей оценки положения, подаваемой одометром, на основе упомянутого точного положения;
если она не принимает точное местоположение поезда из системы сигнализации, и спутниковый терминал определяет текущее положение поезда вдоль железнодорожного маршрута, связанное с уровнем достоверности, который удовлетворяет заданным условиям безопасности на железной дороге, подачи в качестве текущего положения поезда текущего положения, определяемого с помощью спутникового терминала, и коррекции текущей оценки положения, подаваемой одометром, на основе упомянутого текущего положения, определяемого спутниковым терминалом;
если она не принимает точное положение поезда из системы сигнализации, и спутниковый терминал определяет текущее положение поезда вдоль железнодорожного маршрута, связанное с уровнем достоверности, который не удовлетворяет заданным условиям безопасности на железной дороге, подачи в качестве текущего положения поезда текущей оценки положения, передаваемой одометром; и
если она не принимает точное положение поезда из системы сигнализации, и спутниковый терминал не определяет текущее положение поезда вдоль железнодорожного маршрута, подачи в качестве текущего положения поезда текущей оценки положения, подаваемой одометром.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения некоторые предпочтительные варианты осуществления, которые предусмотрены исключительно для пояснений и в качестве неограничительного примера, будут представлены со ссылкой на приложенные чертежи (которые выполнены не в масштабе), на которых:
на Фиг. 1 представлена схематическая иллюстрация сценария примера, в котором работает ERTMS-ETC первого уровня;
на Фиг. 2 представлена схематическая иллюстрация сценария примера, в котором работает ERTMS-ETC второго уровня;
на Фиг. 3 представлена схематическая иллюстрация системы установки положения поезда в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
на Фиг. 4 представлена схематическая иллюстрация архитектуры системы типа ERTMS-ETCS, внутри который интегрирован архитектурный уровень для определения местоположение спутника, в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
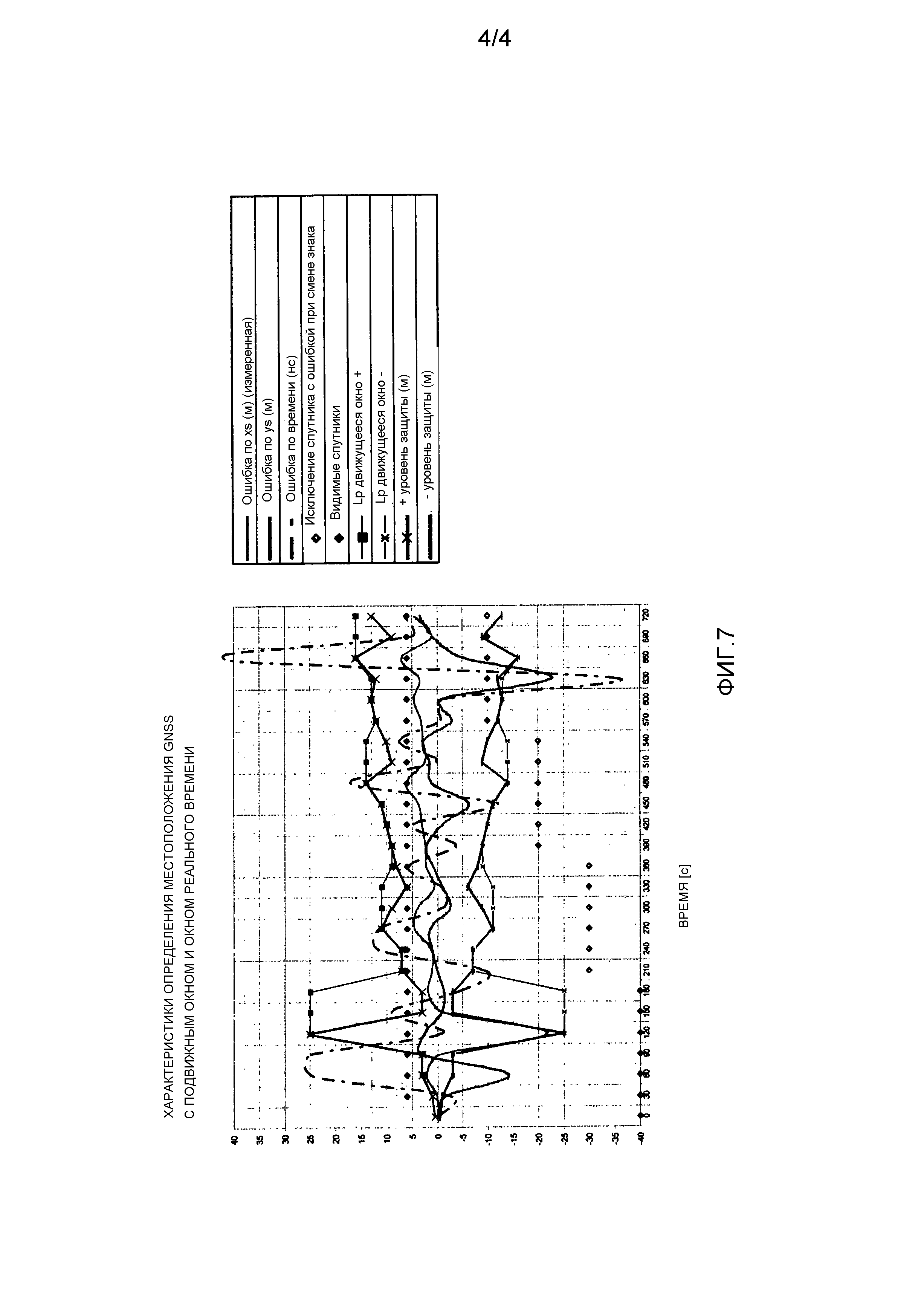
на Фиг. 5 показана типичная ошибка одометра и ошибка одометра, корректируемого, используя местоположение спутника в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
на Фиг. 6 показана декартова опорная система, представленная в качестве примера, используемого при вычислении положения поезда в соответствии с предпочтительным вариантом осуществления настоящего изобретения; и
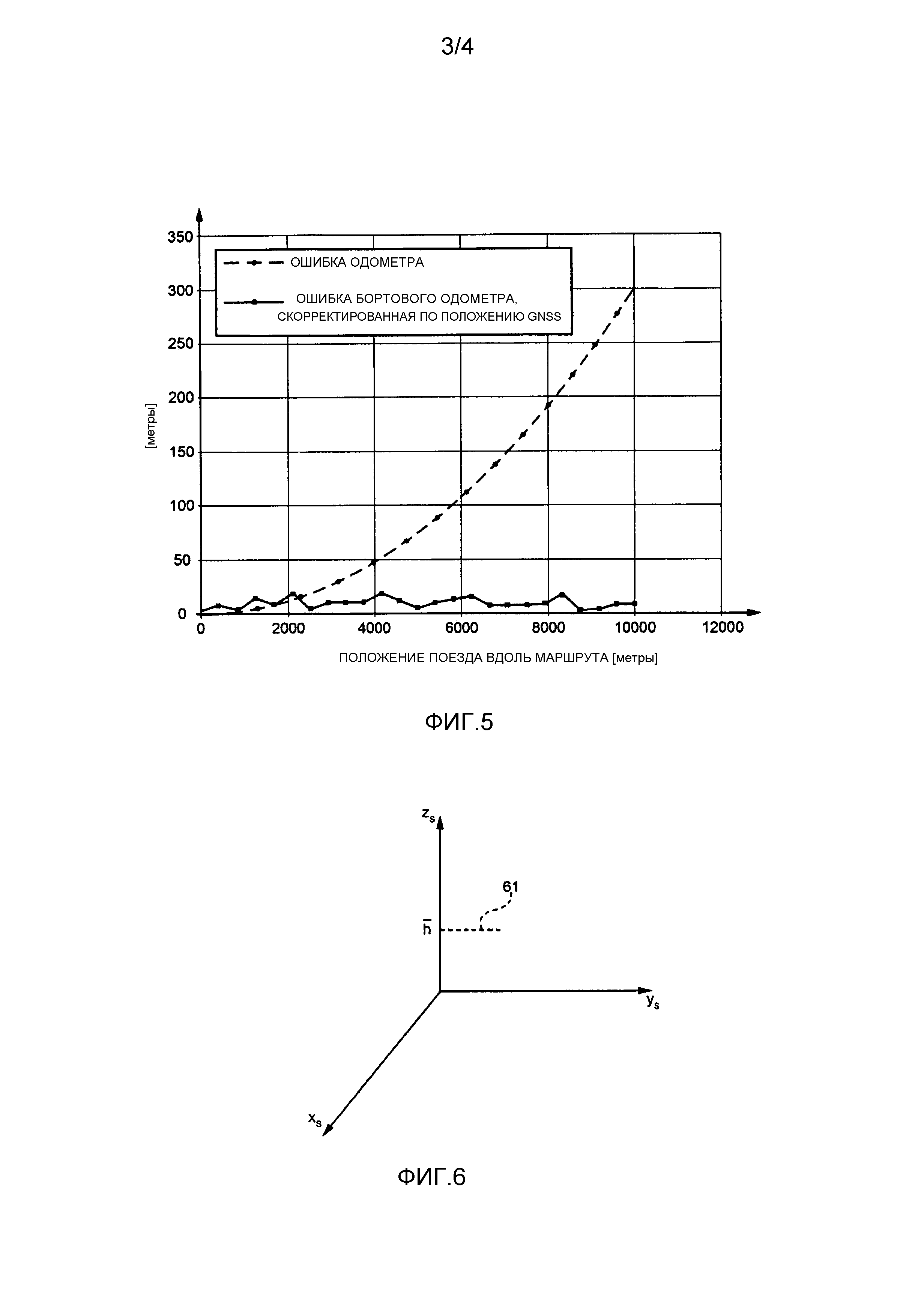
на Фиг. 7 показаны графики, которые представляют ошибки и уровни защиты, которые могут быть получены при определении места положения поезда, используя настоящее изобретение.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Следующее описание представлено для обеспечения для лица, имеющего навыки в данной области техники, возможности осуществления и использования изобретения. Различные модификации представленных вариантов осуществления будут сразу понятны для специалистов в данной области техники, и общие принципы, раскрытые здесь, можно применять в других вариантах осуществления и приложениях, таким образом не выходя за пределы объема настоящего изобретения.
Следовательно, настоящее изобретение не следует понимать, как ограниченное только описанными и представленными вариантами осуществления, но ему должна быть предоставлена наибольшая степень защиты в соответствии с принципами и характеристиками, представленными здесь и определенными в приложенных пунктах формулы изобретения.
Настоящее изобретение основано на идее настоящего заявителя использовать одну или более глобальных спутниковых систем навигации (GNSS), таких как, например, GPS, Европейская система спутниковой навигации Галилео, Российская система спутниковой навигации GLONASS и т.д., для определения места положения поезда. Фактически, данный заявитель на основании интуиции понимает, что использование GNSS для управления движением поездов позволило бы существенно упростить путевую инфраструктуру, существенно уменьшая количество бализов и, следовательно, затрат, связанных с обслуживанием инфраструктуры, которые в настоящее время особенно высоки. Кроме того, настоящий заявитель также интуитивно понимает, что благодаря использованию спутниковой навигационной информации, было бы возможно переключиться на концепцию непрерывного бализа, поскольку спутниковые данные потенциально могут использоваться в любой точке железнодорожных сетей.
В конечном итоге, настоящий заявитель также понимает то, что в настоящее время, когда GNSS эксплуатируют для определения местоположения поездов, необходимо, для гарантирования безопасности железнодорожного сообщения, иметь также доступную сертификацию спутниковых навигационных данных, то есть, информацию о достоверности оценки положения.
Следовательно, первый аспект настоящего изобретения относится к спутниковому терминалу, который был разработан с возможностью его установки на борту поезда и выполнен с возможностью:
приема навигационных сигналов со спутников, принадлежащих одной или более спутниковым навигационным системам, например, принадлежащих GPS и/или системе Галилео и/или системе GLONASS;
сохранения данных географической привязки железнодорожного маршрута поезда, и
определения, на основе сохраненных данных географической привязки и принятых навигационных сигналов, положения поезда вдоль железнодорожного маршрута и уровня достоверности, связанного с упомянутым расчетным положением.
В частности, уровень достоверности обозначает максимальную ошибку, связанную с расчетным положением.
Поскольку упомянутый спутниковый терминал определяет положение поезда с предоставлением в режиме реального времени сертификации, то есть уровня его достоверности, становится возможным гарантировать безопасность железнодорожного сообщения. В частности, упомянутый спутниковый терминал, для сертификации положения поезда, рассчитанного на основе навигационных сигналов, принимаемых от множества спутников GNSS, проверяет в режиме реального времени правильное функционирование упомянутых спутников GNSS.
Далее будет подробно описана работа спутникового терминала, в соответствии с настоящим изобретением.
Как очевидно, поезд может обычно двигаться по заранее установленному маршрута. Эта характеристика позволяет эксплуатировать уменьшенное количество спутников GNSS для расчета положения поезда. В частности, возможно рассчитывать положение поезда, используя навигационные сигналы, принятые только от двух спутников GNSS. Если доступны больше, чем два спутника GNSS, становится также возможным получить информацию о достоверности самих спутниковых данных.
Кроме того, в дополнение к информации о достоверности, также возможно улучшить точность на основе индекса точности данных, который может быть получен представленным геометрическим ослаблением точности (GDOP), которое составлено из вклада, связанного с потенциальной неопределенностью PDOP (DOP положения) и вклада, связанного с неопределенностью времени TDOP (DOP времени); этот индекс зависит от углового расстояния, которое отделяет каждый из спутников GNSS, которые находятся в поле обзора поезда, местоположение которого требуется определить.
В пределах рамок неопределенности положения, кроме того, возможно идентифицировать вертикальную неопределенность VDOP (вертикальная DOP), связанную с вертикальной координатой, и неопределенность направления в плоскости движения HDOP (горизонтальная DOP). Эти концепции, которые хорошо известны в области техники аэронавигации, подвергались сильной реинтерпретации в контексте анализа движения поезда, фактически, в железнодорожной отрасли, становится возможным ввести концепцию sDOP, где s означает криволинейную абсциссу, идентифицирующую путь, налагаемый на поезд железнодорожными путями.
В частности, неопределенность sDOP, соответствующая криволинейной абсциссе s, может быть оценена путем проекции компонентов ошибки положения, известной из классического подхода на направление маршрута, по которому следует поезд, что составляет достоверность данных, подаваемых возможным инерционным навигатором на борту поезда, например, одометром. Сам по себе расчет DOP в любом случае будет модифицирован в отношении того, что происходит в соответствии с классическим подходом в области аэронавигации. Фактически, присутствие геометрического ограничения, накладываемого железнодорожными путями, уменьшает количество степеней свободы, и, следовательно, количество спутников GNSS, необходимых для оценки положения. В частности, если известен ноль, то есть, исходно положение на криволинейной абсциссе s, то есть, если исходная точка движения поезда известна, количество спутников GNSS, необходимых для оценки упомянутой криволинейной абсциссы s и коррекции смещения по времени падает до двух. Это означает, что в присутствии множества спутников GNSS всегда возможно идентифицировать лучшую пару, или набор из трех спутников GNSS с целью минимизации sDOP, следовательно, улучшая точность в дополнение к проверке достоверности.
Следовательно, на основе того, что было описано выше, спутниковый терминал, в соответствии с настоящим изобретением, выполнен с возможностью:
выделения из принятых навигационных сигналов навигационных данных, соответствующих спутникам GNSS, которые передали упомянутые навигационные сигналы;
определения, на основе сохраненных данных географической привязки и данных местоположения, соответствующих, по меньшей мере, двум спутникам GNSS, положения поезда вдоль железнодорожного маршрута; и
определения, на основе сохраненных данных географической привязки и данных местоположения, соответствующих, по меньшей мере, трем спутникам GNSS, уровня достоверности, связанного с упомянутым расчетным положением.
Для определения положения поезда, упомянутый спутниковый терминал обычно использует декартову опорную систему, установленную таким образом, что ось z совпадает с локальной вертикалью поверхности Земли, оси y и x, которые перпендикулярны друг другу, расположены в плоскости, касательной к поверхности Земли, и ось y ориентирована в направлении, согласующимся с криволинейной абсциссой s.
При использовании криволинейной координаты s и упомянутой выше декартовой опорной системы и учитывая, что координата поезда относительно оси x равна 0 и что координата поезда относительно оси z равна среднему локальному радиусу Земли, увеличенному на среднее локальное возвышение (упомянутые значения известны для спутникового терминала, благодаря сохраненным данным географической привязки в отношении протяженности железнодорожного маршрута, по которому должен пройти поезд), становится возможным уменьшить до двух количество неизвестных системы уравнений псевдодальности; то есть, остаточные неизвестные представляют собой значение криволинейной координаты s и смещения времени δt.
В частности, упомянутое смещение по времени δt возникает из
преимущественно смещения по времени между часами спутникового терминала и часами спутников GNSS, из которых упомянутый спутниковый терминал принимает навигационные сигналы; и
во вторую очередь, смещений по фазе, введенных в навигационные сигналы из-за различных факторов, например, из-за явления многолучевого распространения, распространения через атмосферу, в частности, ионосферу и т.д.
Следовательно, двух спутников GNSS достаточно для решения системы из двух уравнений псевдодальности двух неизвестных; а именно, возможно, рассчитать значение криволинейной координаты s и смещения времени δt на основе данных местоположения, соответствующих только двум спутникам GNSS, тогда как, если бы данные местоположения, соответствующие трем или более спутникам GNSS, были доступны, также стало бы возможно ввести критерий для оценки ошибки, полученной при определении криволинейной координаты s.
Например, на основе гипотезы, что спутниковый терминал получает навигационные сигналы от пяти спутников GNSS, упомянутый спутниковый терминал для расчета положения поезда и оценки ошибки может обычно выполнять следующие операции:
для каждой возможной комбинации из трех спутников GNSS спутниковый терминал определяет, на основе данных местоположения, соответствующих упомянутым трем спутникам GNSS, соответствующего смещения по времени Δt и соответствующего значения координаты y (то есть, криволинейной координаты s), налагая, в соответствующей системе из трех уравнений псевдодальности=0 и z равное среднему локальному радиусу Земли, увеличенному на среднее локальное возвышение (то есть, устанавливая уровень z, равный средней высоте  протяженности железнодорожного маршрута, по которому должен двигаться поезд, упомянутую среднюю высоту рассчитывают на основе данных географической привязки на протяженности железнодорожного маршрута, сохраненных спутниковым терминалом); и,
протяженности железнодорожного маршрута, по которому должен двигаться поезд, упомянутую среднюю высоту рассчитывают на основе данных географической привязки на протяженности железнодорожного маршрута, сохраненных спутниковым терминалом); и,
для каждой возможной комбинации из трех спутников GNSS, спутниковый терминал вводит в соответствующую систему из трех уравнений псевдодальности соответствующие значения, рассчитанные для y и δt, исключая для x ограничения его равенства нулю, и, таким образом, определяет ошибку, с которой каждое уравнение псевдодальности вводят по координате x, на основе пары соответствующих решений, найденных для y и δt.
Таким образом, спутниковый терминал получает, для каждого возможного набора из трех спутников GNSS, соответствующее значение для y, соответствующее значение для δt и три соответствующие ошибки для x. Имея доступными пять спутников GNSS, спутниковый терминал может рассматривать N наборов из трех спутников GNSS, то есть, N простых комбинаций из трех спутников GNSS, где
В результате анализа ошибок спутниковый терминал может, таким образом, исключить два спутника GNSS, для которых получается наибольшая ошибка и, следовательно, рассматривает только комбинацию или комбинации, сформированные спутниками GNSS, которые позволяют получить наименьшую ошибку. Таким образом, спутники GNSS с существенно ошибочными данными могут быть исключены из расчета положения поезда.
В частности, если предположить, что обычно один или более наборов из трех спутников GNSS могут быть идентифицированы, становится возможным рассчитать, для каждого набора из трех рассматриваемых спутников соответствующую среднюю ошибку, соответствующую координате x; в частности, становится возможным рассчитать среднее значение трех соответствующих ошибок, рассчитанных в соответствии с координатой x. Кроме того, если предположить, что ошибки имеют изотропную характеристику, средняя ошибка, соответствующая координате x, также обозначает среднюю ошибку, соответствующую координате y, то есть, соответствующую криволинейной координате s.
Для каждого набора из трех рассматриваемых спутников GNSS, следовательно, возможно рассчитать:
на основе соответствующей средней ошибки, соответствующей x, соответствующую дисперсию σ (которая, на основе гипотезы изотропной ошибки, обозначает соответствующую дисперсию ошибки, соответствующую y), если, например, принять Гауссову кривую распределения ошибки; и,
на основе соответствующего изменения дисперсии σ, соответствующий уровень защиты LP, который обозначает максимальную ошибку, потенциально вносимую в оценку положения поезда, и, следовательно, обратно пропорциональную точности оценки положения поезда; например, уровень защиты LP может быть удобно рассчитан, как кратное дисперсии σ, то есть, LP=А·σ, где A≥2.
В это время спутниковый терминал отбрасывает, на основе уровня защиты LP,рассчитанного для различных наборов из трех спутников GNSS, те спутники GNSS, которые, когда их учитывают для расчета положения поезда, определяют наибольший уровень защиты LP, выбирая для определения положения поезда набор или наборы из трех спутников GNSS, которые сформированы только спутниками GNSS, позволяющими получить самый низкий уровень защиты LP.
В частности, спутниковый терминал может определять положение поезда на основе расчетного положения (0, y,  ), которое связано с минимальным уровнем защиты LP, следовательно, уровень достоверности, связанный с упомянутым положением поезда, определяют на основе упомянутого минимального уровня защиты LP.
), которое связано с минимальным уровнем защиты LP, следовательно, уровень достоверности, связанный с упомянутым положением поезда, определяют на основе упомянутого минимального уровня защиты LP.
В качестве альтернативы, спутниковый терминал может:
рассчитывать для каждого набора из трех спутников GNSS, из которых он получает навигационные сигналы, соответствующий индекс DOP на основе данных местоположения, соответствующих упомянутым трем спутникам GNSS и соответствующего положения (0, y, ), рассчитанных на основе данных местоположения, соответствующих упомянутым трем спутникам GNSS, и
соответствующий индекс надежности на основе упомянутого соответствующего индекса DOP и соответствующего уровня защиты LP;
выбирать набор из трех спутников GNSS на основе расчетных показателей надежности; например, спутниковый терминал может выбирать набор из трех спутников GNSS, который соответствует показателю надежности, который сводит к минимуму соответствующую комбинацию индекса DOP и уровня защиты LP; и
определять положение поезда и уровень достоверности, связанный с упомянутым положением, на основе, соответственно, положения (0, y, ) и уровня защиты LP, рассчитанных для набора из трех выбранных спутников.
Таким образом, спутниковый терминал, который принимает навигационные сигналы из пяти спутников GNSS, может идентифицировать вплоть двух "ошибочных" спутников GNSS; а именно, его невозможно использовать для расчета положения поезда. В случае, когда присутствуют три "приводящие к ошибке" спутника GNSS, спутниковый терминал все еще позволяет выбирать лучшую конфигурацию, но ошибка не может быть полностью устранена, и значение уровня защиты увеличивается.
В случае, когда "приводящих к ошибке" спутников GNSS больше, чем три, спутниковый терминал больше не может определять достоверность, но обеспечивает более высокий уровень защиты.
В этом отношении, ниже представлены пять примеров анализа достоверности спутниковых данных, в случае, когда спутниковый терминал принимает навигационные сигналы из пяти спутников GNSS, причем каждый пример кратко представлен в соответствующей таблице.
В ЧАСТНОСТИ, НИЖЕ ПРЕДСТАВЛЕНЫ:
Таблица 1, в которой сведены данные первого сценария примера, в котором спутниковый терминал принимает навигационные сигналы от пяти спутников GNSS, ни один из которых не приводит к ошибке (спутники, которые не приводят к ошибкам, связаны в представленных ниже пяти таблицах с символом "•") то есть, все эти пять спутников GNSS могут использоваться спутниковым терминалом для определения положения поезда с минимальным уровнем защиты, то есть, получая минимальную ошибку (упомянутый минимальный уровень защиты обозначен в следующих таблицах, как 1);
Таблица 2, в которой сведены данные второго сценария примера, в котором спутниковый терминал принимает навигационные сигналы от пяти спутников GNSS, только один из которых приводит к ошибке (спутники, которые приводят к ошибкам, обозначены в следующих таблицах символом "X") то есть, в котором четыре спутника GNSS могут использоваться спутниковым терминалом, для определения положения поезда с уровнем защиты 1;
Таблица 3, в которой сведены данные третьего сценария примера, в котором спутниковый терминал принимает навигационные сигналы от пяти спутников GNSS, два из которых приводят к ошибкам, то есть, в котором только три спутника GNSS могут использоваться спутниковым терминалом, для определения положения поезда с уровнем защиты 1;
Таблица 4, в которой сведен четвертый сценарий примера, в котором спутниковый терминал принимает навигационные сигналы из пяти спутников GNSS, три из которых приводят к ошибкам, то есть, в котором спутниковый терминал позволяет определять положение поезда со средним уровнем защиты, то есть, со средней ошибкой (упомянутый средний уровень защиты, обозначен в следующих таблицах 2); и
Таблица 5, в которой сведен пятый сценарий примера, в котором спутниковый терминал принимает навигационные сигналы из пяти спутников GNSS, четыре из которых приводят к ошибкам, то есть, в которой спутниковый терминал позволяет определять положение поезда только с высоким уровнем защиты, то есть, с очень высокой ошибкой (упомянутый высокий уровень защиты обозначен в следующих таблицах 3).
|
|
|
|
|
Все представленные выше примеры относятся к случаю, когда спутниковый терминал принимает навигационные сигналы от пяти спутников GNSS, что представляет наиболее частый случай для приемника GNSS. В любом случае, методология расчета положения поезда, описанная выше, может применяться, очевидно, также к случаю, когда спутниковый терминал принимает навигационные сигналы от четырех спутников GNSS. В этом случае можно рассматривать четыре набора из трех спутников GNSS, и, следовательно, возможно идентифицировать только один спутник с ошибкой. Кроме того, методология расчета положения поезда, описанная выше, может применяться, очевидно, также в случаях, когда спутниковый терминал принимает навигационные сигналы более, чем от пяти спутников GNSS. В этих случаях количество спутников с ошибкой, которое может быть идентифицировано, увеличивается.
В соответствии со вторым аспектом настоящего изобретения, спутниковый терминал, описанный выше, может предпочтительно использоваться с первым уровнем и вторым уровнем ERTMS-ETC.
В частности, положение поезда, передаваемое спутниковым терминалом, вместе с информацией о достоверности в отношении упомянутого положения, предпочтительно может использоваться для коррекции оценки положения, подаваемого бортовым одометром поезда. Таким образом, становится возможным исключить необходимость использования плотного распределения евробализов (по одной на километр или меньше) и ограничить их использование всего лишь до нескольких точек. Фактически, достоверные данные местоположения, передаваемые спутниковым терминалом, заменяют и расширяют концепцию бализа. Фактически, использование данных спутникового положения исключает ошибку интегрирования одометра, которые, будучи основанным на данных угловой скорости, и, следовательно, спутниковых данных местоположения, если они связаны с существенной точкой, составляет виртуальный бализ. Кроме того, спутниковые данные местоположения являются намного более представительными: связанные с полностью географически привязанной линией железнодорожных путей, их можно использовать в любой момент вдоль маршрута, следовательно, они позволяют революционизировать саму идею фиксированных существенных точек.
Техническое преимущество, связанное с использованием спутникового терминала, описанного выше, представлено тем фактом, что последний позволяет использовать бортовые одометры, которые имеют меньшую точность и, следовательно, являются менее дорогостоящими (как при производстве, так и с точки зрения срока службы).
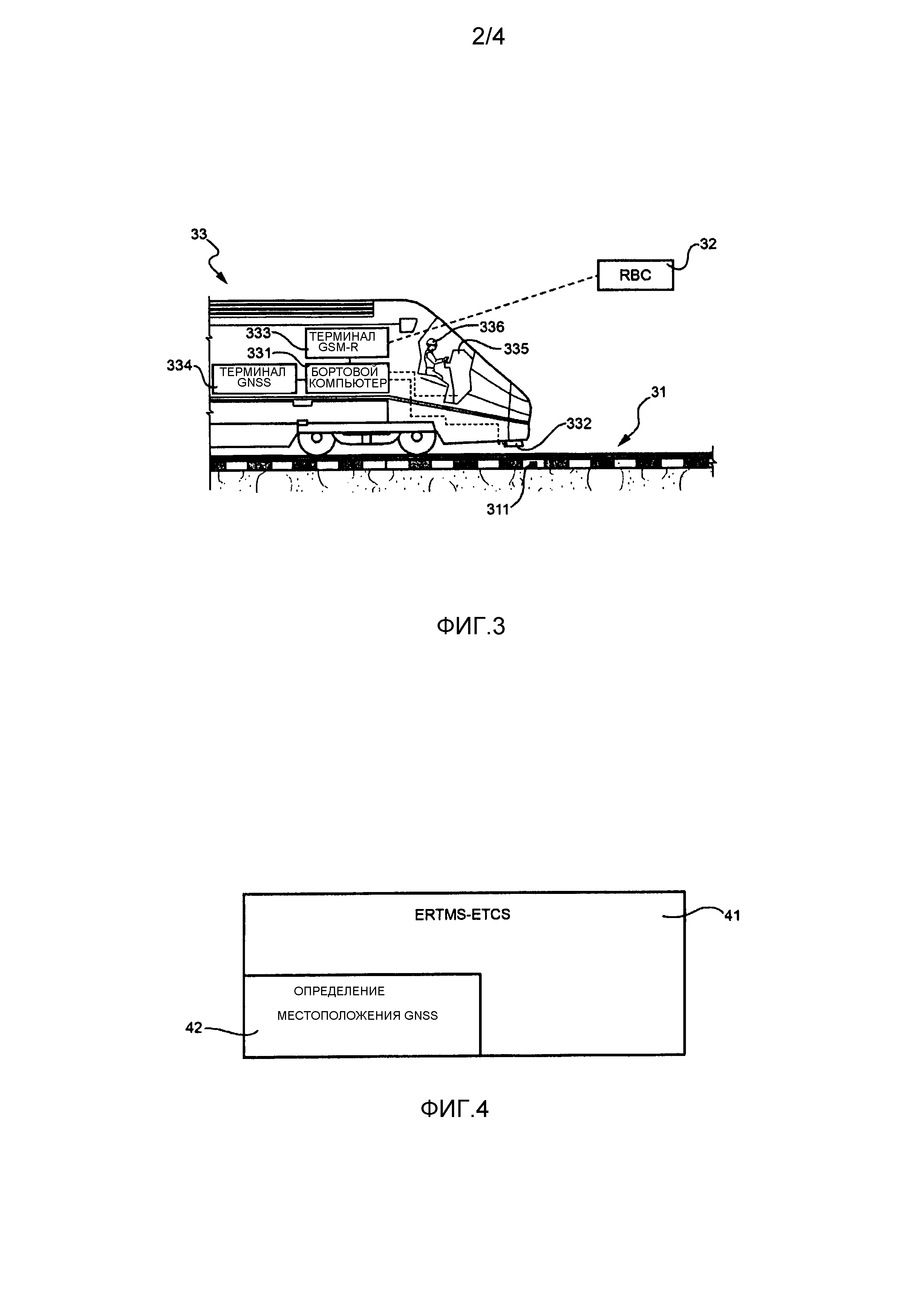
На Фиг. 3 схематично представлена система для определения местоположения поездов в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
В частности, на Фиг. 3 представлена, в качестве неограничительного примера, интеграция упомянутой системы определения положения во втором уровне ERTMS-ETC.
Подробно, на Фиг. 3 показаны:
участок железнодорожной линии (в целом обозначенный номером 31), который содержит евробализ (обозначен, как 311);
RBC (обозначена, как 32); и
поезд (в целом обозначен, как 33), который движется вдоль участка железнодорожной линии 31 и на борту установлен бортовой компьютер (обозначен, как 331), который соединен с приемником (обозначен, как 332), с терминалом 333 GSM-R, который обеспечивает обмен информацией RBC 32 с терминалом 334 GNSS, который содержит географически привязанный маршрут, по которому следует поезд 33, и рассчитывает положение поезда 33 на маршруте, описанном выше, и панель управления (обозначена, как 335), выполненную с возможностью предоставлять информацию машинисту (обозначенную, как 336) поезда 33.
Подробно, RBC 32 передает в терминал 333 GSM-R информацию, относящуюся к участку железнодорожной линии 31, такой как, например, авторизация движения поездов, их замедления и максимально разрешенная скорость. Терминал 333 GSM-R передает информацию, принятую из RBC 32, в бортовой компьютер 331. Бортовой компьютер 331 отображает на панели 335 управления информацию, принятую из RBC 32, через терминал 333 GSM-R, вместе с другой информацией (например, текущим профилем торможения поезда 33), полученной на основе обработки упомянутой информации, принятой из RBC 32, и другой информацией, относящейся к поезду 33 (например, скорость, вес и длина поезда 33).
Кроме того, евробализ 311 является географически привязанным, то есть, для него известно ее собственное точное местоположение, и он передает при проходе поезда, через индуктивное средство или по радио, упомянутое точное местоположение. Когда поезд 33 проходит через евробализ 311, приемник 332 принимает положение, переданное упомянутым евробализом 311, и передает его в бортовой компьютер 331.
Кроме того, бортовой компьютер 331 соединен с бортовым одометром (не показан на Фиг. 3 по причинам простоты) поезда 33 для приема от последнего оценки положения поезда 33. Бортовой компьютер 331 выполнен с возможностью:
если он принимает из приемника 332 точное местоположение, подаваемое из евробализа 311, определения, как положения поезда 33 точного положения, передаваемого евробализом 311, и коррекции оценки положения, передаваемого бортовым одометром на основе упомянутого точного положения;
если он не принимает из приемника 332 точное положение, передаваемое евробализом 311, и терминал GNSS 334 подает положение, связанное с уровнем достоверности, который удовлетворяет конкретным условиям безопасности на железной дороге, определения, как положения поезда 33, положения, передаваемого терминалом 334 GNSS, и определения оценки положения, передаваемого бортовым одометром на основе упомянутого положения, подаваемого из терминала 334 GNSS;
если он не принимает из приемника 332 точное положение, подаваемое евробализом 311, и терминал 334 GNSS подает положение, связанное с уровнем достоверности, который не удовлетворяет конкретным условиям безопасности на железной дороге, определения в качестве положения поезда 33 оценки положения, передаваемой бортовым одометром;
если он не принимает из приемника 332 точное положение, передаваемое евробализом 311, и терминал 334 GNSS не подает какое-либо положение (например, поскольку поезд 33 расположен в области, не охватываемой какой-либо GNSS), определения в качестве положения поезда 33 оценки положения, передаваемой бортовым одометром.
Конкретные условия безопасности на железной дороге могут быть предпочтительно сохранены бортовым компьютером 331 и/или могут определяться динамически бортовым компьютером 331, и/или могут подаваться динамически в бортовой компьютер 331 RBC 32 через терминал 333 GSM-R. Например, бортовой компьютер 331 может определять конкретные условия безопасности на железной дороге на основе информации, относящейся к участку железнодорожной линии 31, принятой из RBC 32, и данных в отношении поезда 33, таких как, например, скорость, вес и длина поезда 33. В частности, бортовой компьютер 331, предпочтительно, может выполнять оценку, удовлетворяет ли текущий уровень достоверности, связанный с положением, подаваемым терминалом 334 GNSS, условиям безопасности на железной дороге для участка железнодорожной линии 31, для гарантирования безопасности железнодорожного транспорта на упомянутом участке железнодорожной линии 31.
Наконец, положение поезда 33, направление движения поезда 33, вместе со всей другой необходимой информацией, автоматически передают с помощью бортового компьютера 331 в RBC 32 через терминал 333 GSM-R. Таким образом, RBC 32 отслеживает движение поезда 33.
На основе того, что было описано выше, становится понятно, что спутниковый терминал, в соответствии с настоящим изобретением, в частности, является полезным в перспективе ERTMS-ETC, в той мере, как:
он гарантирует процедуру сертификации данных местоположения в режиме реального времени; то есть, он в состоянии подавать в режиме реального времени уровень достоверности рассчитанного положения;
он позволяет выполнять свою интеграцию на первом уровне и на втором уровне ERTMS-ETC с минимальными модификациями текущей конфигурации упомянутой системы; в частности, он не требует каких существенных модификаций Центра Радио-Блока и требует только незначительных модификаций системы на борту поездов;
он позволяет функционировать, как виртуальный бализ, обеспечивая, таким образом, возможность эволюции использования бализов от концепции дискретного использования до конкретной инновационной концепции использования без какого-либо разрыва, что позволяет корректировать ошибки бортового одометра в любой точке протяженности железнодорожного маршрута и, следовательно, обеспечивает возможность ввода третьего уровня ERTMS-ETC, то есть, мобильного блока.
В общем, местоположение спутника, в соответствии с настоящим изобретением, может быть предпочтительно интегрировано в архитектуру ERTMS-ETC, как уровень наложения, как схематично показано на Фиг. 4.
В частности, на Фиг. 4 показана блок-схема, в которой иллюстрируется архитектура системы типа ERTMS-ETCS, которая интегрирует местоположение спутника в соответствии с настоящим изобретением.
Более подробно, архитектура, показанная на Фиг. 4, содержит:
архитектурный уровень ERTMS-ETC тип 41; и
архитектурный уровень местоположения 42 GNSS, в соответствии с настоящим изобретением, который частично наложен на архитектурный уровень ERTMS-ETC тип 41.
Как было описано выше, система GNSS для определения местоположения поездов, в соответствии с настоящим изобретением, работает следующим образом:
если присутствует бализ, положение поезда представляет собой положение, подаваемое бализом, и ошибку бортового одометра сводят к нулю, используя положение, подаваемое бализом;
если бализ отсутствует, и уровень достоверности, подаваемый в местоположение GNSS, удовлетворяет конкретным условиям безопасности на железной дороге, положение поезда представляет собой положение, получаемое через местоположение GNSS, и ошибку бортового одометра корректируют, используя положение, полученное через местоположение GNSS;
если бализ отсутствует, и уровень достоверности, подаваемый в местоположение GNSS, не удовлетворяет конкретным условиям безопасности на железной дороге, положение поезда представляет собой положение, подаваемое бортовым одометром; и
если бализ отсутствует, и определение местоположения GNSS не позволяет получить какое-либо положение, положение поезда представляет собой положение, подаваемое бортовым одометром.
Предполагая, что бализы могут быть установлены с чрезвычайной точностью (порядка одного метра), благодаря географической привязке (например, используя приемники GPS) имеющие статистические характеристики, которые являются достаточно продолжительными по времени, ошибки в случае ERTMS-ETC, преимущественно, зависят от точности бортового одометра, типа маршрута, который прошел поезд (проскальзывание на рельсах, торможение и т.д.), и расстояние между двумя последовательными бализами.
На Фиг. 5 показан график, представляющий ошибку одометра и ошибку одометра, скорректированную на основе положения, полученного через определения местоположения GNSS, как функцию положения поезда (принимая скорость поезда 300 км/ч и линейную ошибку, из-за проскальзывания).
Как показано на Фиг. 5, максимальная ошибка, из-за одометра после 10 км составляет 300 м, тогда как ошибка одометра, скорректированная на основе положения, полученного через определение местоположения GNSS, всегда составляет порядка нескольких метров.
Ошибка местоположения GNSS, в принципе, зависит от измерения положения, и составляет порядка нескольких метров, независимо от состояния скорости поезда, так как положение получают непосредственно на основе спутниковой триангуляции, а не на основе интегрирования скорости (как в случае, одометра). Кроме того, возможно уменьшить ионосферную ошибку, используя сигналы GNSS по двум частотам.
Важное преимущество настоящего изобретения выводится из возможности получения информации ошибки из данных расчета положения, используя ограничение для поезда, который следует по географически привязанным путям. Фактически, таким образом, как описано выше, для поезда остаются две неизвестных: криволинейная координата и смещение по времени.
В этом отношении, на Фиг. 6 показана декартова опорная система zsxsys, представленная в качестве примера, используемого при расчете положения поезда в соответствии с настоящим изобретением.
В частности, как показано на Фиг. 6, на оси ys представлена криволинейная абсцисса s, вдоль которой движется поезд, ось xs представляет направление, нормальное криволинейной абсциссе s, и zs представляет локальную вертикаль поверхности Земли. На Фиг. 6, кроме того, номером 61 обозначен маршрут, по которому следует поезд, который, как описано выше, расположен таким образом, что каждая точка вдоль упомянутого маршрута 61 xs=0 и zs= , где представляет собой среднюю высоту упомянутого маршрута 61, рассчитанную на основе данных географической привязки упомянутого маршрута 61. Предполагая, что xs и ys являются изотропными, и в отношении распределения ошибок (учитывая, что обе координаты xs и ys лежат в плоскости, касательной к поверхности Земли), как описано выше, становится возможным рассчитать значение ys (и смещение по времени), путем решения системы уравнений псевдодальности и с последующим перерасчетом ошибки по xs в отношении положения номинального "0".
, где представляет собой среднюю высоту упомянутого маршрута 61, рассчитанную на основе данных географической привязки упомянутого маршрута 61. Предполагая, что xs и ys являются изотропными, и в отношении распределения ошибок (учитывая, что обе координаты xs и ys лежат в плоскости, касательной к поверхности Земли), как описано выше, становится возможным рассчитать значение ys (и смещение по времени), путем решения системы уравнений псевдодальности и с последующим перерасчетом ошибки по xs в отношении положения номинального "0".
Оценка этих ошибок для каждого спутника обеспечивает возможность расчета уровня защиты LP таким образом, что упомянутый уровень защиты LP всегда больше, чем ошибка по ys. Разработанный алгоритм, кроме того, позволяет предоставить важную информацию по различным компонентам ошибки, которые должны быть получены, не малую важность среди которых представляет собой вклад ионосферы.
На Фиг. 7 показан типичный график ошибки и уровня защиты LP на маршруте приблизительно60 км.
Как показано на Фиг. 7, ошибка всегда находится в пределах уровня защиты LP, который рассчитывают в режиме реального времени для наилучшего набора из трех доступных спутников GNSS. Система GNSS для определения местоположения поездов позволяет идентифицировать неисправности спутников GNSS и устранять из расчета положения поезда спутники GNSS, которые представляют неисправность. Маршрут поезда может быть, как прямолинейным, так и криволинейным, и может быть аппроксимирован с высокой степенью точности. По Фиг. 7 можно отметить, что по сравнению с ошибкой 300 м, более чем 10 км, получаемой при использовании бортового одометра (ошибка, показанная на Фиг. 5), местоположение GNSS вводит ошибки меньше чем 30 м на маршруте, имеющем практически любую длину. Это подразумевает то, что для получения ошибки меньше чем 30 м, предпочтительно обеспечить бализы, не через каждые 2-3 км, а одну через каждые 50-60 км, без изменения точности измерения и безопасности железнодорожного транспорта. С этой точки зрения следует отметить, что бализ может быть установлен в местах, которые являются легко доступными для технического обслуживания и легко управляемыми, также с точки зрения безопасности систем.
Другое важное наблюдение относится к непрерывной доступности данных местоположения, что позволяет выполнить при тех же затратах, ввод мобильного блока третьего уровня ERTMS-ETC.
Понятно, что, в случае когда данные спутника не доступны, или ошибка, обозначенная уровнем достоверности, слишком высока, например, больше чем 50 м (ситуация, которая может продолжаться в течение нескольких секунд), система позволяет передать сигнал (отсутствие уровня защиты или ошибки за пределами границы), и только одометр в течение этого периода будет представлять собой единственный источник информации, который может использовать (процедуру слияния данных, на основе механизм эксклюзивности) для исключения множества источников информации.
Из представленного выше описания могут быть легко понятными преимущества настоящего изобретения.
В частности, следует еще раз подчеркнуть, что настоящее изобретение предпочтительно может быть интегрировано в существующих системах и будущих системах (то есть, тех, которые уже находятся на стадии разработки) для администрирования, управления, защиты и передачи сигналов о железнодорожном сообщении; в частности, они могут предпочтительно использоваться со всеми тремя уровнями ERTMS-ETC. Фактически, настоящее изобретение:
подает данные местоположения, которое гарантирует эффективную службу определения местоположения поездов;
гарантирует точность данных местоположения, что позволяет улучшить процедуры мониторинга и управления движением поездов;
подает в режиме реального времени достоверность данных местоположения, гарантируя, таким образом, безопасность (в смысле "безопасности для жизни") железнодорожного транспорта в режиме реального времени; и
подает данные местоположения таким образом, что возможно их взаимодействие с евробализами.
С точки зрения логики данные местоположения GNSS, связанные с географически привязанной точкой вдоль железнодорожных путей (существенная точка), составляют виртуальный бализ. Это приводит к тому, что количество физических бализов может быть уменьшено с получением преимущества в результате более простого и более экономичного управления и администрирования системы.
Реальное преимущество спутниковых данных, однако, находится не том, что не требуется привязка к жесткой, хотя и виртуальный системы определения положения по опорным точкам, обеспечивая то, что можно назвать системой непрерывного бализа. Концепция непрерывного бализа представляет собой полностью готовую с третьим уровнем ERTMS-ETC, которая не привязана к фиксированному участку железнодорожного маршрута. Ключевой элемент для принятия спутниковых данных в архитектуре ERTMS-ETC, следовательно, состоит в достоверности самих данных в режиме реального времени.
Кроме того, настоящее изобретение предпочтительно соответствует сценарию развития итальянских и европейских железнодорожных путей, в которых гипотетически предполагается в будущем использовать европейскую навигационную спутниковую систему Галилео, которая, как известно, будет передавать информацию о сертификации работы спутников и об ошибке, введенной в положение. Но, так как настоящее изобретение может предпочтительно использоваться с любой GNSS, становится возможным расширить сценарий использования спутниковых данных при определении местоположения поездов. Важная причина использования системы на основе не только системы Галилео состоит в факторе "управления". Фактически, она будет, в отличие от России, Китая или Индии, использовать не частную систему (то есть, Галилео) для стратегической и критической инфраструктуры, такой как железнодорожная отрасль. В этой перспективе, в случае железных дорог, возможно, будет более целесообразно принять стратегию использования множества созвездий спутников (как в качестве технологий для резервирования информации, так и в качестве технологий сравнения), вместо обычного управления только одной системой (в Европе Галилео, в России GLONASS и т.д.). Следовательно, поскольку настоящее изобретение можно использовать с одной или более GNSSs, оно могло бы позволить обеспечить развитие системы для определения местоположения поездов, что обеспечило бы возможность взаимодействия между железными дорогами в разных странах.
В конечном итоге, еще раз следует подчеркнуть, что настоящее изобретение позволяет определять в любой момент времени не только положение поезда, но также максимальную ошибку, которая была допущена при измерениях, и проверять правильность работы спутников.
В конечном итоге, становится понятно, что различные модификации могут быть выполнены в настоящем изобретении, все из которых находятся в пределах сферы защиты изобретения как определено в присоединенных пунктах формулы изобретения.
Усовершенствованное определение местонахождения в помещении
Система для спутниковой связи в туннелях
Адаптивный способ оптимизации с множественной пристрелкой для определения оптимальных траекторий космического летательного аппарата
Управление синхронизированными симметричными ключами для защиты данных, которыми обмениваются узлы связи
Усовершенствованное определение местонахождения в помещении
Система для спутниковой связи в туннелях
Адаптивный способ оптимизации с множественной пристрелкой для определения оптимальных траекторий космического летательного аппарата
Управление синхронизированными симметричными ключами для защиты данных, которыми обмениваются узлы связи
Система для определения местоположения объекта в туннелях с использованием спутниковых сигналов

