Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ
Вид РИД
Изобретение
Изобретение относится к рыбной промышленности, а более конкретно к области технологического оборудования для сортировки рыбы, и может найти применение на береговых рыбообрабатывающих предприятиях и судах промыслового флота.
При производстве соленой деликатесной продукции предъявляются повышенные требования к ее качеству. Важнейшим показателем качества соленой рыбы является среднемассовая концентрация соли в ее тканях (соленость). В соответствии с международными стандартами разброс концентрации соли от заданного значения не должен превышать ±0,5%. Вместе с тем, на соленость готовой продукции влияют вид и жирность рыбы, размер тушек, концентрация тузлука, продолжительность посола, интенсивность циркуляции тузлука. В настоящее время изготовление соленой деликатесной продукции выполняется преимущественно методом прерванного посола в циркулирующем тузлуке. При этом в условиях рыбоперерабатывающих производств величина разброса солености рыбы составляет от 1,5 до 3%. Это вызвано неравномерностью просаливания, слеживаемостью рыбы в посольных емкостях, отсутствием средств контроля параметров посола, колебаниями концентрации тузлука, разбросом морфометрических параметров сырья. Поскольку активный контроль солености рыбы в процессе ее посола в настоящее время затруднен из-за отсутствия надежных датчиков и значительного количества возмущающих факторов, требуется сортировка готовой продукции по концентрации соли в тканях. Это обусловлено необходимостью направления соленой рыбы на доработку в случае несоответствия показателя качества продукции требованиям стандарта.
Основной проблемой при отбраковке готовой деликатесной продукции является точное определение солености каждой тушки. Применение методов разрушающего контроля концентрации соли в тканях рыбы (например, титрование) исключается в связи с требованиями сохранности продукта и поточности производства. В связи с этим требуется применение быстродействующего метода неразрушающего контроля солености готовой продукции.
Основным параметром, позволяющим измерить концентрацию соли в тканях рыбы, является удельный вес тушки. В процессе посола удельный вес тушек увеличивается за счет диффузии соли в ткани рыбы. При этом концентрация соли в тушках возрастает, в то время как концентрация тузлука снижается. Таким образом, контроль качества готовой продукции по такому показателю как соленость может быть достигнут сортировкой рыбы по удельному весу.
Для определения удельного веса тушки требуется измерение ее объема и веса. Для отслеживания изменения удельного веса рыбы в процессе посола требуется измерение удельного веса одного экземпляра до обработки. Так как удельный вес необработанного одновидового сырья в пределах одной партии практически одинаков, этот параметр используется в качестве начального значения.
Известно устройство для сортировки томатов по плотности (RU №1803026, МПК A23N 15/00, опубл. 23.03.1993), состоящее из емкости с переливным отверстием, транспортирующего элемента с верхней и нижней ветвями, лотков отвода зрелых и незрелых овощей, направляющей. Один конец направляющей погружен в емкость, а другой загнут в направлении лотка для отвода незрелых томатов. Транспортирующий элемент выполнен в виде цепного контура с пластинами. Сортировка овощей осуществляется за счет всплывания незрелых томатов на поверхность жидкости, а также за счет погружения зрелых томатов на дно емкости.
Недостатком устройства является сортировка всего на две фракции плотности продукта. Поскольку некоторые экземпляры овощей оказываются в промежуточном положении между поверхностью жидкости и дном емкости, они либо попадают в лоток для зрелой продукции, либо остаются в емкости. Таким образом, устройство не обеспечивает точной сортировки, разделяя продукт по удельному весу в зависимости от всплывающего усилия.
Известно устройство для сортировки рыбы по удельному весу (RU №1613095, МПК А22С 25/04, опубл. 15.12.1990), включающее емкость для жидкости, делительную пластину, сопряженную с разгрузочным приспособлением. Пластина выполнена в виде в виде витка спирали, передний торец которой расположен горизонтально по направлению движения потока жидкости, а задний торец расположен вертикально. Пластина снабжена шарнирно укрепленной на ее горизонтальном конце поворотной лопастью. Устройство сортирует рыбу по степени солености за счет расслаивания тушек по высоте в потоке на несколько фракций. Расслаивание продукта по высоте обусловлено различными всплывающими усилиями, возникающими у рыбы с разной соленостью.
Основными недостатками данного устройства являются сортировка рыбы всего на две фракции солености продукта, а также низкая точность сортировки. Поскольку концентрация тузлука в процессе сортировки изменяется вследствие поглощения соли тканями рыбы, а всплывающее усилие тушек зависит от концентрации тузлука, не обеспечивается необходимая точность сортировки. Сортировка рыбы на две размерные фракции приводит к перемешиванию тушек рыбы с нормальной и пониженной соленостью, а также тушек с нормальной и повышенной соленостью. Это не позволяет контролировать качество готовой продукции. Производительность устройства ограничена невысокой скоростью движения потока тузлука с рыбой в емкости, поскольку повышение скорости потока жидкости приводит к снижению точности сортировки. Регулирование предела солености осуществляется вручную, процесс сортировки не автоматизирован, поскольку отсутствует вычислительный блок.
Наиболее близким техническим решением является устройство для сортировки рыбы (RU №643140, МПК А22С 25/04, опубл. 25.01.1979), включающее конвейер, содержащий две ленты, установленные под острым углом одна к другой, блок считывания, выполненный в виде телекамеры с полупрозрачным экраном и цветными светофильтрами, сортирующие механизмы, выполненные в виде оси, расположенной перпендикулярно к конвейеру, и сужающейся вниз пластины, установленной на оси с возможностью поворота и регулирования щели между лентами конвейера, блок анализа и управления, соединенный с блоком считывания и сортирующими механизмами. Устройство осуществляет сортировку рыбы по размерным фракциям за счет формирования видеоизображения тушек в блоке считывания, распознавания образа рыбы в блоке анализа и управления, получения информации о геометрической форме и размерах тушек, а также об их окраске и оттенках кожного покрова.
Недостатком устройства являются получение плоского видеоизображения тушки рыбы, что не позволяет измерить ее объем. Применение в сортирующих механизмах сужающихся вниз пластин, входящих в щель между лентами конвейера, ограничивает максимальные размеры обрабатываемой рыбы шириной пластин и упругостью лент. Кроме того, соприкосновение пластин с лентами конвейера приводит к рывкам в движении рыбы, что вносит существенные погрешности при получении видеоизображения рыбы и существенно ограничивает производительность устройства. В устройстве отсутствует приспособление для контроля прохождения тушки в поле зрения видеокамеры, что обусловливает необходимость постоянного опроса видеокамеры блоком анализа и управления и ограничивает производительность устройства. В устройстве отсутствует приспособление для измерения веса тушек, что не позволяет рассчитывать удельный вес продукта и выполнять сортировку по солености.
Изобретение решает задачу создания устройства сортировки рыбы по ее солености на основе определения удельного веса тушки рыбы за счет оснащения устройства датчиком веса, лазерным источником излучения и программирования блока анализа и управления на вычисление объема тушки, ее удельного веса, а также формирования команды соответствующему сортирующему механизму на отвод тушки с конвейера в заданном направлении.
Для достижения необходимого технического результата в устройстве для сортировки рыбы, содержащем конвейер, блок считывания, включающий видеокамеру, сортирующие механизмы, блок анализа и управления, соединенный с блоком считывания и сортирующими механизмами, предлагается блок считывания оснастить лазерным источником излучения, расположенным над конвейерной лентой и проецирующим на нее лазерную линию, ориентированную перпендикулярно направлению движения рыбы, а под конвейерной лентой расположить датчик веса, связанный с блоком анализа и управления, который предлагается запрограммировать на последовательное вычисление объема тела рыбы и удельного веса рыбы. Сортирующие механизмы предлагается выполнить в виде направляющих заслонок, связанных с шаговыми двигателями, и установить оппозитно по обеим сторонам конвейера с возможностью поочередного поворота в горизонтальной плоскости над конвейерной лентой для отвода тушки с конвейера в заданном направлении.
В основе принципа работы лазерного триангуляционного измерителя лежит метод определения расстояния между лоцируемым объектом контроля и приемником излучения канала регистрации с использованием тригонометрических соотношений в треугольнике, образованном ветвями каналов подсвета и регистрации изображения, а также расстоянием между ними - базой.
Триангуляционный метод измерения формы тела рыбы использует способность сканирующего лазерного луча распространяться в хорошо коллимированной форме на значительное расстояние. В лазерном источнике развертка лазерного луча в линию осуществляется вращающимся зеркалом. Лазерный луч освещает точку на поверхности рыбы, расстояние до которой от лазерного источника необходимо измерить. Отраженное от исследуемой точки излучение попадает в видеодатчик, выполненный в виде видеокамеры, которая установлена на некотором расстоянии от лазерного луча. При этом лазерный источник, точка на поверхности рыбы и видеодатчик образуют треугольник.
Объектив видеокамеры фокусирует отраженный свет на фоточувствительной матрице. Положение яркого пятна на матрице определяется направлением входящего луча, соответствующим углу между лазерным лучом и отраженным светом. За счет этого вычисляется расстояние от лазерного источника до облучаемой точки на поверхности рыбы.
Поскольку обеспечивается развертка лазерного луча вращающимся зеркалом, тушка рыбы освещается лазерной линией, причем на фоточувствительной матрице видеокамеры формируется двумерное изображение светового профиля тела рыбы. Развертка сканирующего излучения по третьей координате вдоль тела рыбы является механической, так как тушка рыбы перемещается конвейером, и пересекает лазерную линию. За счет этого осуществляется формирование трехмерного образа тела рыбы по последовательности световых профилей.
Наличие блока анализа и управления, выполненного, например, в виде микроЭВМ, позволяет рассчитать методом триангуляции размеры тела рыбы по видеоизображению светового профиля тушки, сформировать трехмерный образ рыбы, рассчитать объем тела рыбы, вычислить удельный вес рыбы по объему и весу тушки, а также сформировать управляющие команды для шаговых двигателей. Программа ЭВМ позволяет на основании информации об удельном весе рыбы осуществлять автоматическую сортировку тушек на три фракции, которые соответствуют качественному продукту, а также изделиям с недостаточной и повышенной соленостью.
Режим работы направляющих заслонок характеризуется как режим поворота или порционирования вала шаговых двигателей. Таким образом, цель состоит в обеспечении строгой пропорциональности между суммарным углом поворота и числом поданных импульсов, то есть в исключении накапливаемой ошибки. При этом закон движения во времени и фазовая траектория движения произвольны. Внутри интервала движения не устанавливается определенного соответствия между мгновенным положением исполнительного вала и номером или моментом подачи каждого управляющего импульса. Динамическая ошибка лимитируется только условиями сохранения устойчивости движения. Подобным требованиям отвечает разомкнутый электропривод на основе шагового двигателя.
Разомкнутый шаговый электропривод обеспечивает устойчивое движение и сохранение полученной информации. Статическая и динамическая ошибки такого привода ограничены максимальными значениями, обусловленными ценою шага и числом тактов коммутации двигателя, и не превышают их во всем диапазоне нормальной работы.
Разомкнутый шаговый электропривод непосредственно реагирует на импульсные команды, причем информационная характеристика сигнала определяется только частотой и числом импульсных посылок. Изменения в определенных пределах амплитуды и формы импульса не нарушают нормальной работы. Скорость вращения и суммарный угол поворота вала двигателя пропорциональны соответственно частоте и числу поданных импульсов. При отсутствии сигнала коммутация фаз прекращается, поле в рабочем зазоре двигателя останавливается, а шаговый двигатель развивает значительный статический момент (синхронизирующий момент). Это позволяет приводу фиксировать конечные координаты любых перемещений. Таким образом, дискретный разомкнутый привод с шаговым двигателем является синхронно-импульсным следящим приводом, сочетающим в себе возможности глубокого частотного регулирования скорости с возможностями числового задания пути и надежной фиксации конечных координат.
В качестве измерителя веса используется быстродействующий тензометрический датчик на основе тензорезистора. При измерении веса рыбы измеряемой механической величиной является сила, которая воздействует на упругий элемент тензометрического датчика, вызывая его деформацию в пределах диапазона измерений, пропорциональную силе.
Процесс измерения состоит из нескольких этапов. Первоначально происходит преобразование измеряемого усилия в поле механических напряжений в теле упругого элемента. Затем в соответствии с законом Гука напряжения преобразуются в поле деформаций поверхности, после чего чувствительный элемент тензорезистора преобразует совокупность деформаций в изменение электрического сопротивления. Далее мостовая электрическая схема, в которую включен тензорезистор, преобразует изменение сопротивления в изменение коэффициента передачи моста по напряжению.
Конструктивно тензорезистор представляет собой чувствительный элемент из тензочувствительного материала (проволока, фольга), закрепленный с помощью связующего (клея, цемента) на упругом элементе (исследуемой детали). Для присоединения чувствительного элемента в электрическую цепь тензорезистор имеет выводные проводники.
Преобразование измеряемой деформации в изменение электрического сопротивления происходит в чувствительном элементе тензорезистора вследствие наличия тензорезистивного эффекта в проводниковых и полупроводниковых материалах. Электрическое сопротивление тела изменяется при деформации как за счет изменения его геометрических размеров, так и за счет изменения удельного сопротивления материала.
К достоинствам электронных тензометрических датчиков отнесены:
- простота измерительного преобразователя деформации в электрический сигнал - тензорезистора;
- возможность проведения измерений в широком диапазоне температур при самотермокомпенсации или автоматической схемной компенсации;
- малые габариты тензорезистора, обеспечивающие возможность измерения в труднодоступных местах;
- практическая безинерционность тензорезистора, вследствие чего амплитудно-частотно-фазовая характеристика измерительного преобразователя фактически определяется лишь свойствами упругого элемента;
- высокая стабильность измерительных свойств;
- возможность измерения деформаций при различных размерах базы, начиная с десятых долей миллиметра;
- возможность дистанционных измерений в большом количестве точек;
- возможность измерений при самых различных внешних условиях (влажность, давление), неблагоприятных для других измерительных средств.
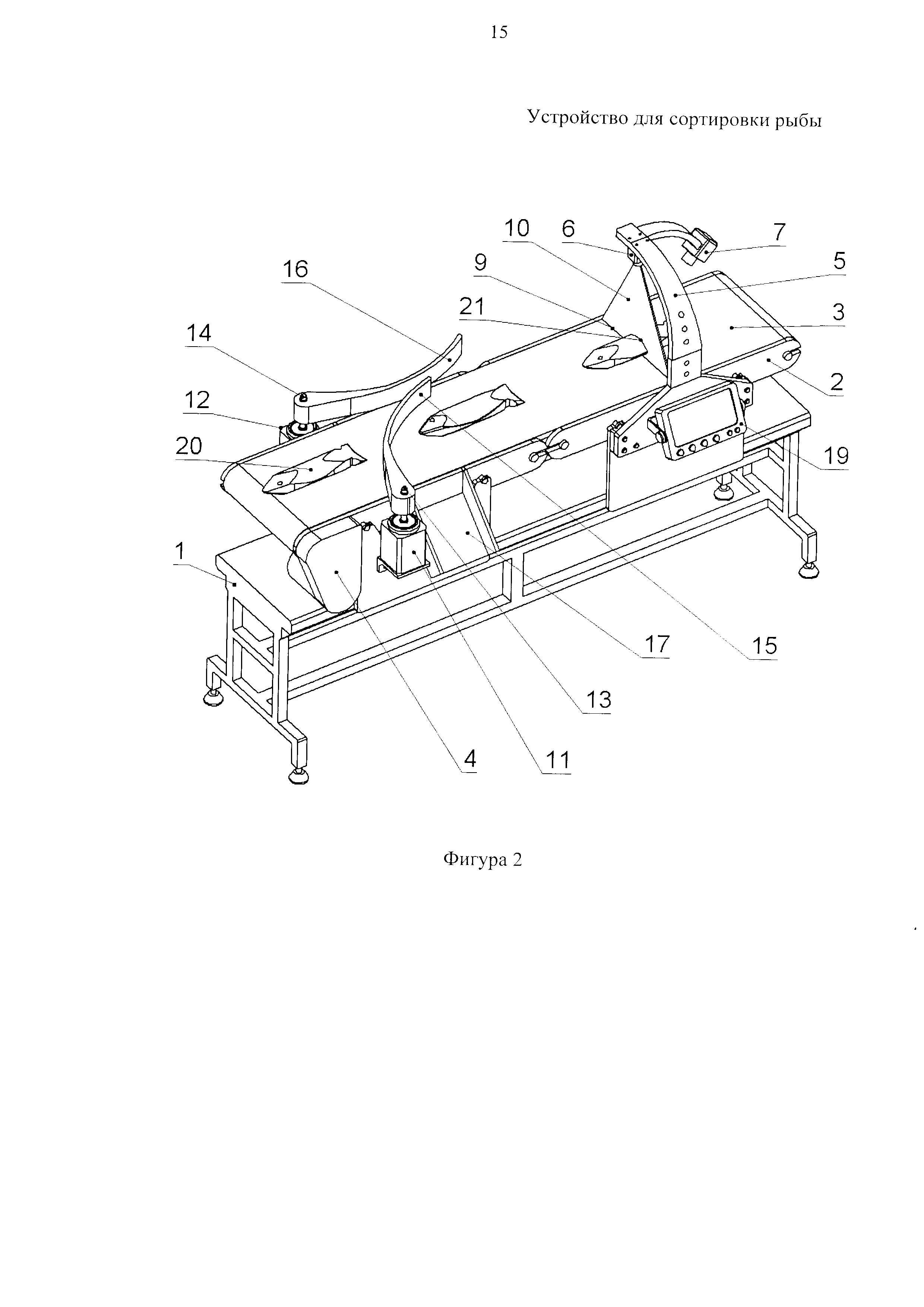
На фиг. 1 представлена схема предлагаемого устройства для сортировки рыбы.
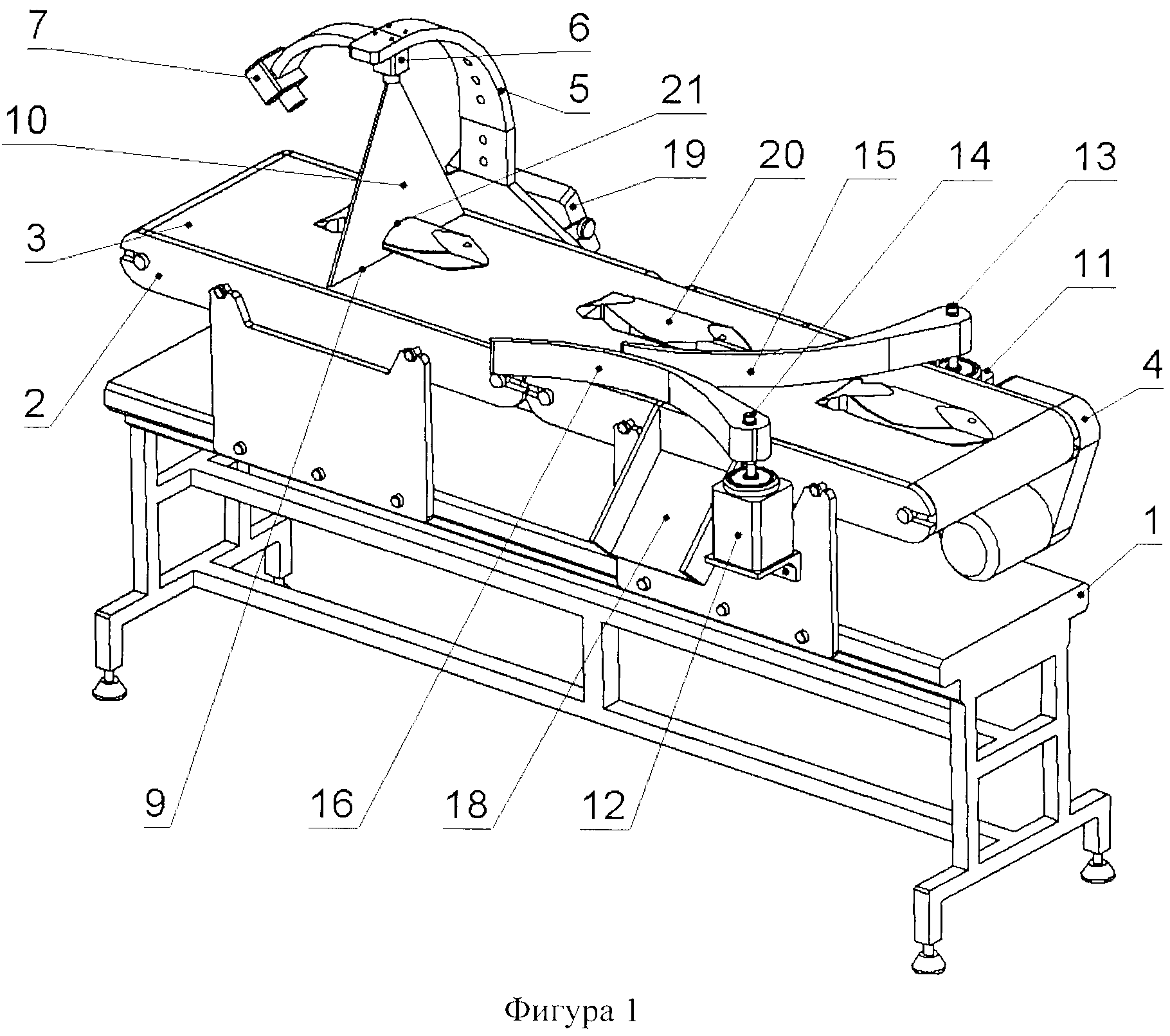
На фиг. 2 представлена схема предлагаемого устройства для сортировки рыбы со стороны блока анализа и управления.
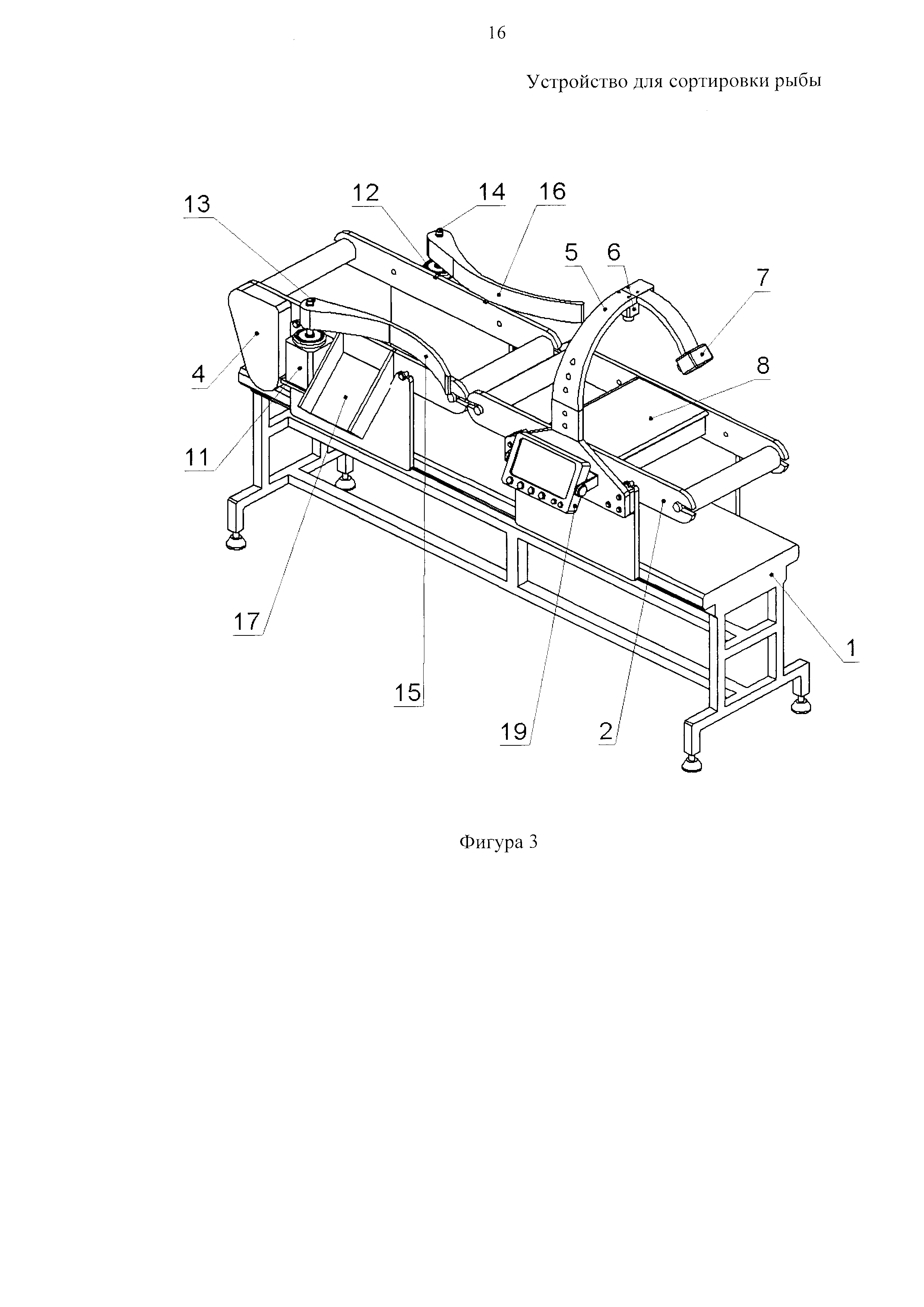
На фиг. 3 представлена схема предлагаемого устройства для сортировки рыбы без ленты конвейера.
На схемах приняты следующие обозначения:
1 - опорная стойка;
2 - конвейер;
3 - лента;
4 - привод;
5 - кронштейн;
6 - лазерный источник излучения;
7 - видеокамера;
8 - датчик веса;
9 - лазерная линия;
10 - плоскость лазерного излучения;
11, 12 - шаговый двигатель;
13, 14 - вал шагового двигателя;
15, 16 - направляющая заслонка;
17, 18 - лоток отвода рыбы;
19 - блок анализа и управления;
20 - тушка рыбы;
21 - световой профиль тушки.
В предлагаемом техническом решении повышение точности и производительности сортировки рыбы по удельному весу, автоматизация операции сортировки осуществляется за счет получения трехмерного образа рыбы, формируемого из видеоизображения светового профиля тушки. Световой профиль тушек образуется лазерной линией, проецируемой на поверхность тела рыбы лазерным источником излучения. По мере перемещения тушки через лазерную линию световой профиль рыбы изменяется, поскольку размеры тела рыбы в различных секущих плоскостях различаются. Последовательность световых профилей тушки, записанных видеокамерой через определенные промежутки времени, формируют трехмерный образ рыбы. На основе трехмерного образа рыбы вычисляется объем ее тела. Датчик веса позволяет измерить вес тушки, что в совокупности с вычисленным объемом тела позволяет рассчитать удельный вес рыбы, в зависимости от которого выполняется автоматическая сортировка продукции. Применение шаговых двигателей с закрепленными на их валах направляющими заслонками позволяет существенно повысить производительность устройства и автоматизировать сортировку рыбы по удельному весу.
В предлагаемом устройстве для сортировки рыбы на опорной стойке 1 установлен конвейер 2. Лента 3 закреплена на конвейере 2. Привод 4 соединен с конвейером 2. На кронштейне 5 закреплены лазерный источник излучения 6 и видеокамера 7. Под лентой 3 и лазерным источником излучения 6 закреплен датчик веса 8. Лазерный источник излучения 6 проецирует на ленту 3 лазерную линию 9, которая расположена перпендикулярно движению ленты 3 и находится в поле зрения видеокамеры 7. Видеокамера 7 установлена под углом к плоскости лазерного излучения 10, образованной лазерным источником излучения 6 и лазерной линией 9. На конвейере закреплены шаговые двигатели 11 и 12. На валах шаговых двигателей 13 и 14 с возможностью поворота установлены направляющие заслонки 15 и 16, расположенные вертикально относительно ленты 3. На конвейере 2 закреплены лотки для отвода рыбы 17 и 18. Также на конвейере 2 закреплен блок анализа и управления 19, связанный с приводом 4, лазерным источником излучения 6, видеокамерой 7, датчиком веса 8, шаговыми двигателями 13 и 14.
Работа устройства для сортировки рыбы осуществляется следующим образом.
Тушка рыбы 20 в положении на боку, головой вперед укладывается на ленту 3 конвейера 2. Блок 19 анализа и управления подает команду запуска на привод 4, после чего лента 3 конвейера 2 приводится в движение. Блок 19 анализа и управления подает команды включения на лазерный источник излучения 6 и видеокамеру 7. Лазерный источник излучения 6 проецирует на ленту 3 лазерную линию 9, которая находится в поле зрения видеокамеры 7. Лента 3 двигается с постоянной скоростью и перемещает тушку рыбы 20 к лазерной линии 9. При пересечении тушкой рыбы 20 плоскости лазерного излучения 10 лазерная линия 9 проецируется на поверхности тела рыбы, в результате чего формируется световой профиль тушки 21. По мере прохождения тушки рыбы 20 через лазерную линию 9 световой профиль тушки 21 изменяется, отслеживая форму тела рыбы. Видеокамера 7 формирует совокупность видеоизображений светового профиля тушки 21, наблюдая под углом к плоскости лазерного излучения 10 процесс изменения светового профиля тушки 21 при прохождении тушки рыбы 20 через лазерную линию 9. Последовательность световых профилей тушки 21, записанных видеокамерой 7 через малые промежутки времени и переданных в блок 19 анализа и управления, формируют трехмерный образ рыбы в блоке 19 анализа и управления. Одновременно при прохождении лазерной линии 9 тушка рыбы 20 проходит над датчиком 8 веса. Датчик 8 веса через ленту 3 воспринимает вес рыбы и измеряет его, после чего передает измеренное значение веса рыбы в блок 19 анализа и управления. Блок 19 анализа и управления на основе полученной от видеокамеры 7 видеоинформации, содержащей последовательность световых профилей тушки 21, рассчитывает размеры тела рыбы методом триангуляции. По совокупности рассчитанных размеров рыбы и сформированному трехмерному образу тела рыбы в блоке 19 анализа и управления вычисляется объем тушки. Используя рассчитанное значение объема тела рыбы и значение веса рыбы, блок 19 анализа и управления вычисляет удельный вес тушки рыбы 20. В случае если рассчитанный удельный вес тушки рыбы 20 превышает заданное значение, блок 19 анализа и управления подает команду на шаговый двигатель 11, который поворачивает закрепленную на вале шагового двигателя 13 направляющую заслонку 15 против часовой стрелки. Направляющая заслонка 15 поворачивается над лентой 3 и пересекает линию движения тушки рыбы 20, которая упирается в направляющую заслонку 15 головой. Тушка рыбы 20 перемещается вдоль направляющей заслонки 15 и соскальзывает в лоток 17 отвода рыбы. После соскальзывания тушки рыбы 20 в лоток 17 отвода рыбы блок 19 анализа и управления подает команду на шаговый двигатель 11, который поворачивает направляющую заслонку 15 по часовой стрелке, возвращая ее в исходное положение. В случае, если рассчитанный удельный вес тушки рыбы 20 меньше заданного значения, блок 19 анализа и управления подает команду на шаговый двигатель 12, который поворачивает закрепленную на вале шагового двигателя 14 направляющую заслонку 16 по часовой стрелке. Направляющая заслонка 16 поворачивается над лентой 3 и пересекает линию движения тушки рыбы 20, которая упирается в направляющую заслонку 16 головой. Тушка рыбы 20 перемещается вдоль направляющей заслонки 16 и соскальзывает в лоток 18 отвода рыбы. После соскальзывания тушки рыбы 20 в лоток 18 отвода рыбы блок 19 анализа и управления подает команду на шаговый двигатель 12, который поворачивает направляющую заслонку 16 против часовой стрелки, возвращая ее в исходное положение. В случае, если рассчитанный удельный вес тушки рыбы 20 соответствует заданному значению, блок 19 анализа и управления не подает команды на шаговые двигатели 11 и 12, а тушка рыбы 20 перемещается на ленте 3 мимо заслонок 15 и 16 и выводится из устройства.
Таким образом, обеспечивается точная сортировка рыбы по солености за счет определения удельного веса тушки рыбы, что невозможно выполнить, используя устройство, описанное в ближайшем аналоге.
Устройство для сортировки рыбы, содержащее конвейер, блок считывания, включающий видеокамеру, сортирующие механизмы, блок анализа и управления, соединенный с блоком считывания и сортирующими механизмами, отличающееся тем, что блок считывания оснащен лазерным источником излучения, расположенным над конвейерной лентой и проецирующим на нее лазерную линию, ориентированную перпендикулярно направлению движения рыбы, а под конвейерной лентой расположен датчик веса, связанный с блоком анализа и управления, который запрограммирован на последовательное вычисление объема тела рыбы и удельного веса рыбы, сортирующие механизмы выполнены в виде направляющих заслонок, связанных с шаговыми двигателями и установленных оппозитно по обеим сторонам конвейера с возможностью поочередного поворота в горизонтальной плоскости над конвейерной лентой для отвода тушки с конвейера в заданном направлении.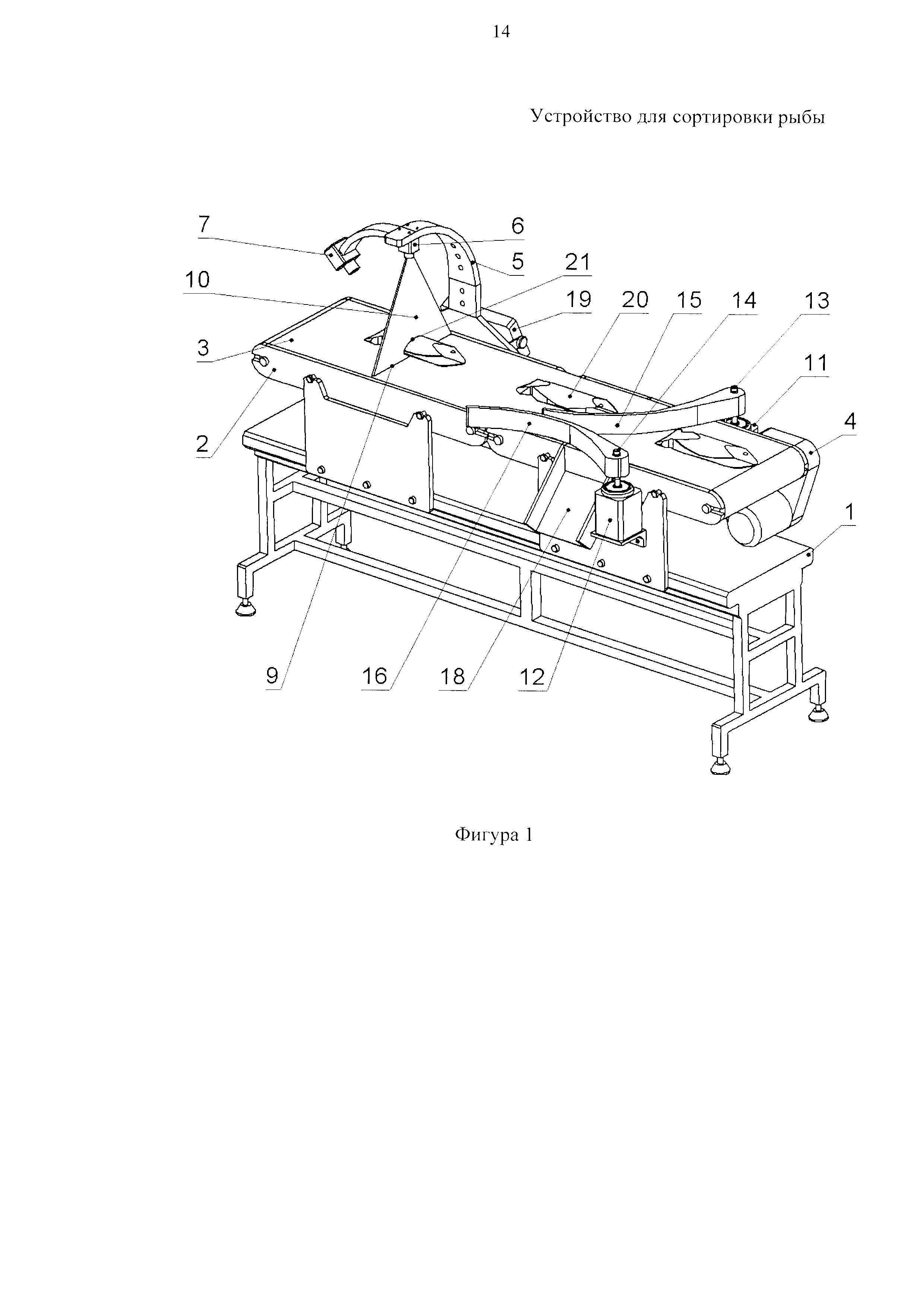
Способ получения кормовой добавки или удобрения
Устройство для филетирования рыбы
Способ и устройство защиты от коррозионного растрескивания сварной металлоконструкции
Устройство для сортировки рыбы
Устройство для резки рыбного филе на ломтики
Устройство для получения рыбного фарша
Устройство для ориентирования рыбы головой в одну сторону
Устройство для поштучного разделения и ориентирования рыбы
Устройство для загрузки рыбы в рыбообрабатывающие машины
Устройство для загрузки рыбы в рыбообрабатывающие машины
Устройство для резки пищевых продуктов
Устройство для ориентирования рыбы головой в одном направлении

