Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ПОСАДКЕ
Вид РИД
Изобретение
Изобретение относится к области пилотирования самолета, в частности к способам автоматического управления самолетом при посадке.
Под посадкой самолета в контексте данной заявки понимается завершающий этап полета с высоты порядка 10-20 метров, на котором происходит выравнивание самолета, снижение его вертикальной скорости и касание взлетно-посадочной полосы (далее - ВПП).
Традиционный способ автоматического управления самолетом при посадке заключается в выдерживании заранее заданной траектории полета и заданной горизонтальной скорости самолета. Заданная траектория при этом рассчитывается как оптимальная траектория для подвода самолета к ВПП в желаемой точке касания, а заданная горизонтальная скорость определяется как оптимальное значение горизонтальной скорости самолета относительно воздуха (далее - воздушной скорости), обеспечивающей требуемую подъемную силу. При нахождении самолета над ВПП на заранее определенной высоте производится сброс тяги двигателей, в результате чего самолет опускается к ВПП в расчетной точке касания.
Однако в условиях изменчивого продольного ветра описанный выше способ не обеспечивает безопасной посадки. Например, при осуществлении посадки в условиях встречного ветра и резком его ослаблении воздушная скорость самолета также резко снизится, что приведет к опасной потере подъемной силы, а значит - и высоты полета. Даже в благоприятном случае возврат к заданной траектории путем набора воздушной скорости и коррекции высоты вызовет нежелательные колебания, которые несут дополнительные риски утраты управляемости самолета.
В то же время, если посадка производится при попутном ветре, то его резкое ослабление увеличит воздушную скорость самолета и вызовет рост подъемной силы. Самолет может неконтролируемо набрать высоту, и в этом случае возврат на заданную траекторию будет сопровождаться ростом вертикальной скорости, создавая риск жесткой посадки.
В патентной публикации US 2011320070 A1, G05D 1/06, 29.12.2011, раскрыт способ коррекции заданной горизонтальной скорости самолета, согласно которому целевая воздушная скорость устанавливается пилотом с учетом скорости ветра. При этом действует ограничение: целевая воздушная скорость не может превышать заданной воздушной скорости, увеличенной на некоторую максимальную скорость ветра.
Недостаток данного способа состоит в том, что он не обеспечивает возможность автоматического управления, и, если ветер изменится, летчик просто не успеет сделать необходимые корректировки.
Целью изобретения является обеспечение минимальной вертикальной скорости самолета в точке касания ВПП, а также обеспечение нахождения точки касания на заданном участке ВПП в условиях изменяющегося продольного ветра.
Для достижения поставленной цели предложен способ управления самолетом в продольном канале при посадке, в котором самолету сообщают целевую воздушную скорость, а руль высоты поворачивают на целевой угол поворота. Целевую воздушную скорость рассчитывают как сумму заданной воздушной скорости и взятой с противоположным знаком величины, пропорциональной скорости ветра. Целевой угол поворота руля высоты рассчитывают как сумму заданного угла поворота, взятого с противоположным знаком угла, пропорционального скорости ветра, и взятого с противоположным знаком угла, пропорционального производной от скорости ветра. Сброс тяги двигателей при этом осуществляют при снижении вертикальной скорости самолета до заданного значения.
В частном случае изобретения скорость ветра рассчитывают как разность между значениями путевой и воздушной скорости самолета.
Осуществление изобретения будет пояснено ссылками на фигуры:
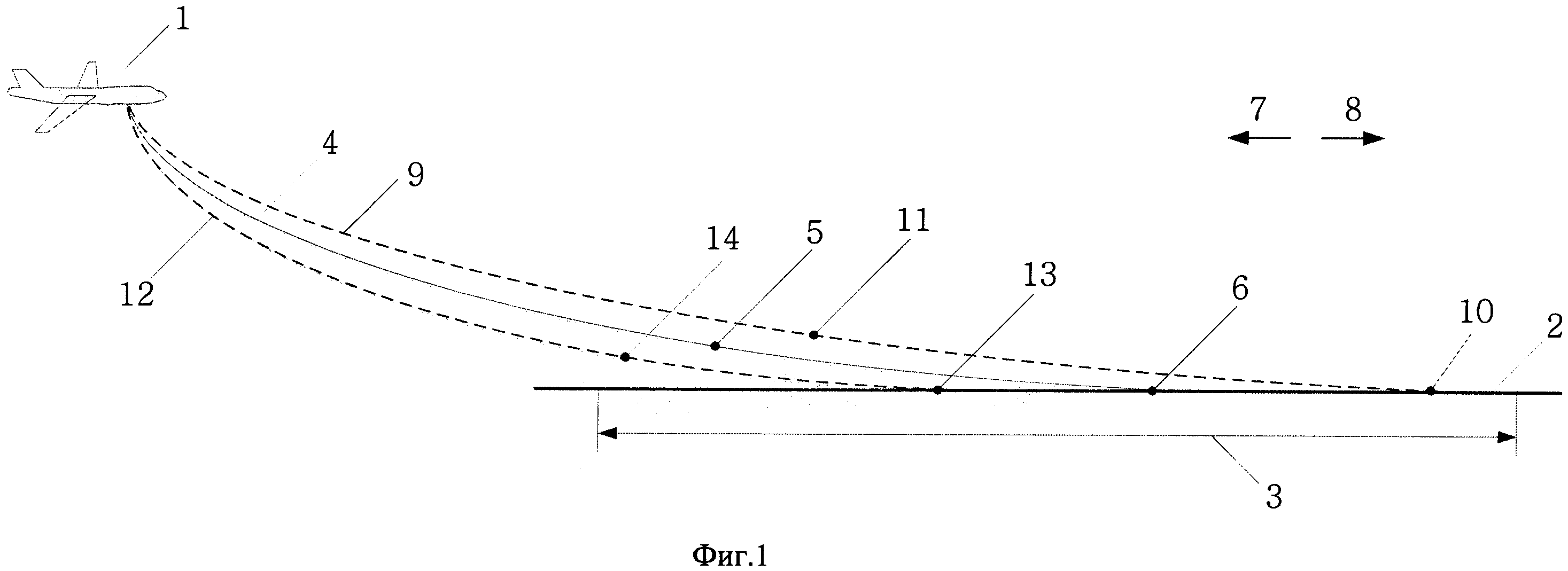
Фиг. 1 - изображение самолета, осуществляющего посадку на ВПП;
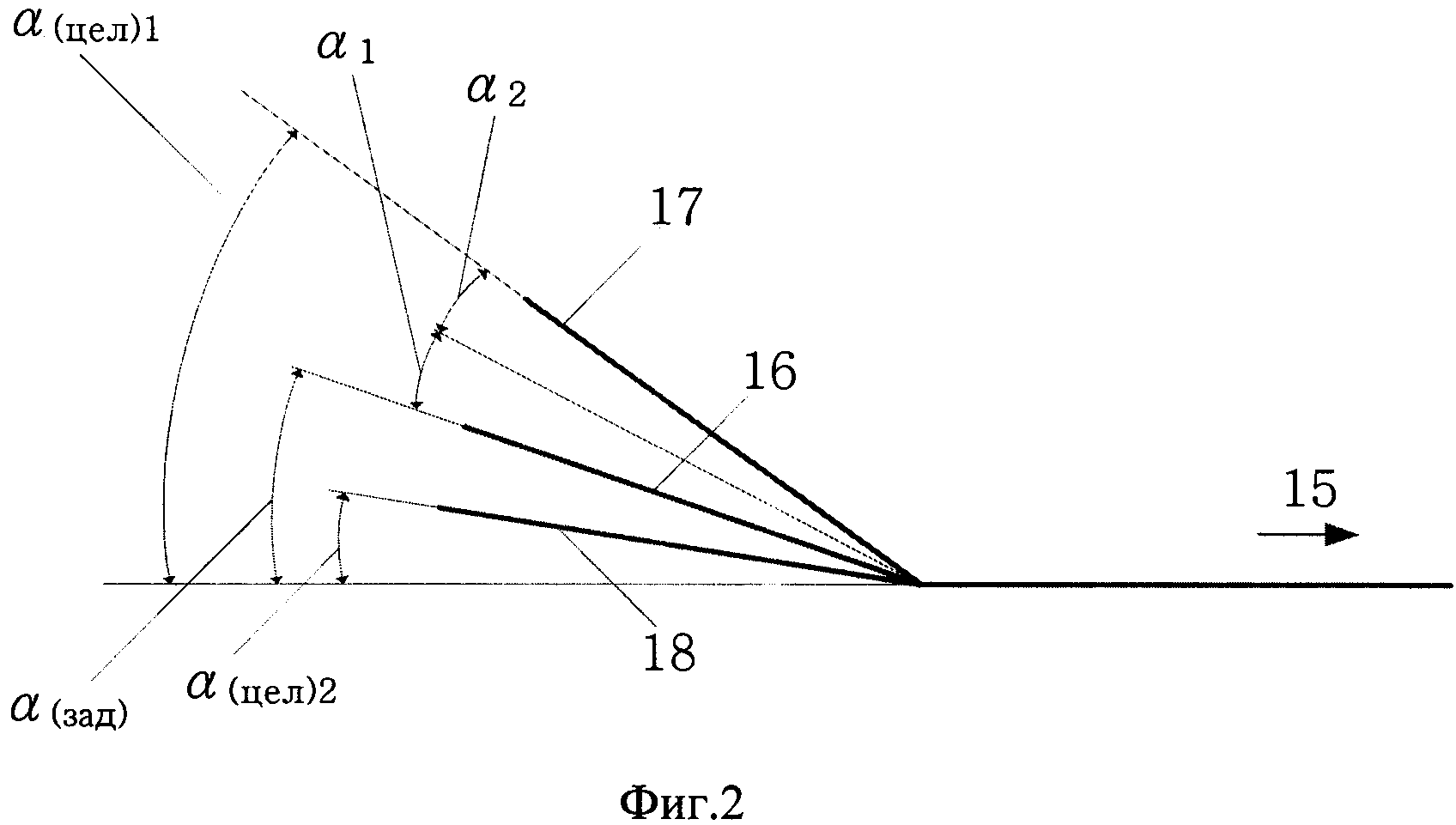
Фиг. 2 - положение руля высоты самолета при осуществлении посадки.
Рассмотрим посадку самолета, проходящую по известному способу.
Самолет 1 выполнил заход на посадку и приступает к посадке в автоматическом режиме на ВПП 2 (Фиг. 1). Под моментом начала посадки понимается момент перехода к выравниванию самолета. Согласно регламенту аэродрома самолет должен осуществить касание ВПП в пределах разрешенного участка 3. В условиях безветренной погоды самолет осуществит посадку по заранее заданной траектории 4 и с заданной воздушной скоростью V(зад). Заданная траектория рассчитана как оптимальная для плавного снижения вертикальной скорости, в то время как заданная воздушная скорость определена как оптимальная для данного типа самолета с точки зрения обеспечения требуемой подъемной силы.
Для отработки заданной траектории руль высоты самолета повернется относительно горизонтального положения на заданный угол α(зад), и займет заданное положение 16 (Фиг. 2, где стрелкой 15 показано направление полета самолета). В точке 5 заданной траектории, т.е. на заранее заданной высоте, произойдет отключение или существенное снижение тяги двигателей, именуемое в дальнейшем как сброс тяги. В качестве заданной высоты принимается высота, на которой при соблюдении заданной траектории и движении с заданной скоростью вертикальная скорость самолета становится минимальной. В результате самолет опустится к ВПП на минимальной вертикальной скорости, и мягкий контакт с ВПП произойдет в расчетной точке касания 6.
Общее понятие «заданная воздушная скорость» включает все значения воздушной скорости, которые заранее определены для каждой точки заданной траектории, а общее понятие «заданный угол поворота руля высоты» включает все значения угла поворота, на которые руль высоты повернут в каждой точке заданной траектории. В свою очередь, общее понятие «заданное положение руля высоты» включает все положения руля высоты, соответствующие заданному углу его поворота.
Следует также отметить, что как известный, так и предложенный способы предназначены для управления самолетом в продольном канале, т.е. под скоростями самолета или ветра, равно как и другими векторными величинами понимаются их проекции на вертикальную плоскость, проходящую через ось ВПП.
Известный способ позволяет осуществить мягкую посадку в безветренных условиях либо в случае действия постоянного продольного ветра. Отмеченные выше недостатки известного способа ярко проявляются именно при изменении скорости ветра.
При отсутствии ветра посадка самолета по предложенному способу проходит аналогично посадке самолета известным способом. Однако при действии как постоянного, так и переменного ветра параметры посадки самолета по предложенному способу изменяются. Далее по тексту под терминами «заданная траектория», «заданная воздушная скорость» и «заданный угол поворота руля высоты» понимаются траектория, воздушная скорость самолета и угол поворота руля высоты, определенные для условий отсутствия ветра.
В случае действия продольного ветра, обозначенного стрелками 7 или 8 и имеющего скорость V(ветер), самолет согласно изобретению направляют к ВПП на целевой воздушной скорости Vx(цел), которая составит:

где Vx(зад) - заданная воздушная скорость самолета;
W - взятая с противоположным знаком величина, пропорциональная скорости ветра, определяемая соотношением:

в котором kc - коэффициент, рассчитанный для данного типа самолета.
Направление движения самолета принимается как положительное, таким образом, скорость встречного ветра будет иметь отрицательное значение, а скорость попутного ветра - положительное.
Целевой поворот руля высоты α(цел) относительно горизонтального положения согласно изобретению составит:

где α(зад) - заданный угол поворота руля высоты;
α1 - взятый с противоположным знаком угол, пропорциональный скорости ветра;
α2 - взятый с противоположным знаком угол, пропорциональный интенсивности изменения скорости ветра. Далее:


где k1 и k2 - коэффициенты, рассчитанные для конкретного самолета;
dV(ветер)/dt - производная скорости ветра по времени.
Направление поворота руля высоты вверх считается положительным, следовательно, встречный ветер, скорость которого имеет отрицательное значение, вызовет коррекцию положения руля вверх, а попутный - вниз.
В предпочтительном случае изобретения скорость ветра рассчитывают как разность между значениями путевой и воздушной скорости самолета. Под путевой скоростью в контексте данной заявки понимается горизонтальная скорость самолета, определенная относительно инерциальной системы отсчета, например, по данным инерциальной навигационной системы или радиомаяка.
Условием сброса тяги согласно изобретению является снижение вертикальной скорости самолета Vy до заранее определенного для данного типа самолета значения Vy(зад), или:

При воздействии встречного ветра 7 посадку осуществляют следующим образом.
В момент начала посадки определяют заданную траекторию, заданную воздушную скорость, заданный угол поворота руля высоты, скорость встречного ветра и интенсивность ее изменения. В соответствии с соотношениями (1)-(5) рассчитывают целевую воздушную скорость самолета, которая превысит заданную воздушную скорость, а также целевой угол поворота руля высоты, который будет больше, чем заданный угол. Посредством контроля тяги двигателей и подачи управляющих сигналов на исполнительные механизмы руля высоты сообщают самолету целевую воздушную скорость и поворачивают руль высоты в целевое положение 17, соответствующее целевому углу поворота α(цел)1. Такое изменение положения руля высоты приведет к увеличению угла тангажа, и самолет начнет отрабатывать целевую траекторию 9, находящуюся выше заданной траектории, при этом расчетная точка касания 10 удалится от самолета.
Следует отметить, что целевое положение руля высоты 17 соответствует ситуации роста скорости встречного ветра и положительного угла α2. При уменьшении скорости встречного ветра угол α2 становится отрицательным.
При резком уменьшении скорости встречного ветра запас по скорости и высоте позволит избежать рискованной ситуации, связанной с недостатком подъемной силы, и обеспечит плавное снижение вертикальной скорости. Поскольку целевая траектория 9 является более пологой относительно заданной, то условие (6) наступит в точке 11, находящейся на большей высоте, чем аналогичная точка 5 заданной траектории 4. Однако под воздействием встречного ветра и повышенной подъемной силы самолет сможет плавно опуститься к расчетной точке касания 10.
При изменении скорости ветра в каждый момент времени по соотношениям (1)-(5) производят коррекцию целевой скорости и целевого угла поворота руля высоты, при этом целевая траектория также будет корректироваться. Включение в расчет целевого угла поворота α(цел)1 слагаемого α2, пропорционального интенсивности изменения скорости ветра, позволяет осуществлять плавное изменение целевой траектории.
Важным преимуществом предложенного способа посадки является то, что самолет не привязан к изначально определенной заданной траектории, а в зависимости от скорости ветра и интенсивности ее изменения в каждый момент времени может следовать по одной из множества целевых траекторий, обеспечивающих плавное снижение вертикальной скорости.
В случае действия попутного ветра 8 согласно соотношениям (1)-(4) целевая воздушная скорость самолета снизится, а руль высоты повернется относительно заданного положения вниз в целевое положение 18, соответствующее целевому углу α(цел)2 (Фиг. 2, углы α1 и α2 для этого случая не показаны). Угол тангажа уменьшится, и самолет начнет движение по целевой траектории полета 12, проходящей ниже заданной траектории и завершающейся точкой касания 13, которая находится ближе к самолету.
При внезапном ослаблении попутного ветра и росте подъемной силы крыла самолет скорректирует свою траекторию и ему хватит длины разрешенного участка для совершения касания ВПП в его пределах. Так как целевая траектория 12 проходит круче заданной траектории, то условие (5) выполняется в точке 14, находящейся ниже точки 5 заданной траектории. В случае порывов попутного ветра сохранение тяги двигателей до меньшей высоты является страховкой от высокой вертикальной скорости самолета при снижении его воздушной скорости и вызванного этим уменьшением подъемной силы.
Как показано на приведенных выше примерах, предложенный способ позволяет обеспечить мягкую посадку самолета, т.е. посадку с минимальной вертикальной скоростью, в условиях действия как встречного, так и попутного ветра.
Способ может быть реализован с естественными для специалиста в данной области ограничениями, например, по минимально допустимой целевой воздушной скорости, обеспечивающей требуемую подъемную силу, или по целевому углу поворота руля высоты, обеспечивающему движение самолета только по такой целевой траектории, точка касания которой находится в пределах разрешенного участка ВПП.
Способ получения белковой биомассы базидиального гриба pleurotus pulmonarius
Способ повышения точности начальной выставки бесплатформенной инерциальной системы
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Штамм candida albicans var. stellatoidea для получения диагностического аллергена
Кольцевой резонатор лазерного гироскопа
Система управления самолетом
Способ управления самолетом
Способ управления скоростью полёта самолёта с учетом стабилизации скорости
Способ электрического стимулирования мяса птицы перед замораживанием

