Результат интеллектуальной деятельности: СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ВОЗДУШНЫМ СУДНОМ И БЕСПИЛОТНЫЙ АППАРАТ, ОСНАЩЁННЫЙ СИСТЕМОЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА
Вид РИД
Изобретение
Настоящее изобретение касается предупреждения столкновений между воздушными судами и, в частности, способа определения траектории для уклонения от столкновения воздушных судов, совместимого с системами предупреждения столкновений ACAS, которыми оснащены гражданские воздушные суда.
Объектом изобретения является также беспилотный летательный аппарат, оснащенный системой, применяющей способ определения траектории уклонения от столкновения с пилотируемым воздушным судном.
Уровень техники
Беспилотный воздушный аппарат (БПЛА) является летательным аппаратом без пилота на борту. Этот летательный аппарат может быть оснащен автоматическими системами и осуществлять свой полет автономно; он может также содержать датчики и управляться дистанционно пилотом с земли. БПЛА все чаще применяются в военной области, в частности, для наблюдения за полем боя, для разведки и даже для атаки по наземным целям.
Такие БПЛА было предложено использовать в гражданской области для осуществления полетов мониторинга или разведки. Действительно, эти БПЛА представляют интерес, поскольку имеют большую автономию полета, но вместе с тем имеют недостаточную маневренность, в частности, что касается набора высоты или снижения. Отсутствие пилота на борту не позволяет БПЛА соблюдать действующие правила осуществления полетов в гражданском воздушном пространстве, которые предусматривают, в частности, чтобы воздушное судно могло обеспечивать функцию «увидеть и уклониться» с целью предупреждения столкновений. Поэтому БПЛА не разрешено летать в несегрегированном воздушном пространстве, то есть в тех же местах и в то же время, что и пилотируемые гражданские воздушные суда.
Известна система предупреждения столкновений, предназначенная для некоторых пилотируемых воздушных судов, которым разрешено летать по приборам. Эта система известна под названием TCAS и соответствует стандарту ACAS, определенному конвенцией по международной гражданской авиации. В Европе все коммерческие самолеты, имеющие более девятнадцати пассажирских кресел, должны быть обязательно оснащены версией II этой системы, включающей в себя транспондер режима S. Система выполнена с возможностью сбора данных о курсе и положении любого воздушного судна, находящегося на расстоянии от 2,5 (4 км) до 30 миль (48 км). Эти данные в основном включают в себя расстояние до этих воздушных судов, их барометрическую высоту и приблизительную информацию об азимуте. Обнаруженные воздушные суда называют «посторонними воздушными судами» (ПВС). Данные получают путем направления запроса в транспондер режима S или типа режима S постороннего воздушного судна и используются системой TCAS II, чтобы определять возможность столкновения с этим посторонним воздушным судном. Под возможностью столкновения следует понимать пересечение курсов воздушных судов на расстояниях, меньших критериев, значения которых заранее вводятся в систему. Приоритетом пользуется система TCAS II (называемая в этом случае «ведущей» системой TCAS) судна, которое первым входит в контакт с системой TCAS II (называемой в этом случае «ведомой» системой TCAS) другого судна. В случае риска столкновения, обнаруженного системой TCAS, пилот каждого воздушного судна получает тревожное сообщение в виде звукового сигнала в кабине экипажа. Такой сигнал называют "Traffic Advisory". Если после этого сигнала риск столкновения не уменьшился и столкновение кажется неизбежным, ведущая система TCAS определяет маневр уклонения для оснащенного этой системой самолета и передает извещение, содержащее эту информацию, на ведомую систему TCAS, которая в свою очередь определяет совместимый маневр уклонения. Каждое извещение, называемое "Resolution Advisory" или RA, передается также соответствующему пилоту через дисплей, встроенный в навигационные инструменты, и дублируется звуковым сигналом. В извещении указывается постороннее воздушное судно, к которому относится сигнал, а также указание пилоту о необходимом маневре: сохранение текущей траектории, набор высоты, снижение или контроль вертикальной скорости. Получив извещение RA от ведущей системы TCAS, ведомая система TCAS передает своему пилоту указание на совместимый маневр. В большинстве ситуаций система TCAS II рекомендует одному из воздушных судов набрать высоту, а другому снизиться, вследствие чего быстро увеличивается расстояние между двумя воздушными судами. Для нормальной работы системы TCAS II необходимо, чтобы оснащенное ею воздушное судно имело хотя бы минимальные характеристики с точки зрения набора высоты и снижения.
Слабая маневренность беспилотных летательных аппаратов при наборе высоты и снижении, а также отсутствие пилота, который мог бы интерпретировать команды системы TCAS II, не позволяют беспилотным летательным аппаратам летать в несегрегированном воздушном пространстве и препятствуют расширению их использования в таких областях, как гражданский мониторинг, предупреждение пожаров или дорожная безопасность. Улучшение маневренности беспилотных летательных аппаратов для осуществления маневров уклонения, предписываемых системой TCAS II, привело бы к увеличению массы и стоимости этих летательных аппаратов и повлияло бы на основные характеристики таких аппаратов, в частности, что касается автономии, минимальной скорости полета, шумности и расхода топлива.
Задача изобретения
Целью изобретения является оснащение беспилотного летательного аппарата функцией «увидеть и уклониться», то есть придание ему способности уклоняться от столкновения с посторонним воздушным судном.
Раскрытие изобретения
В связи с этим объектом изобретения является способ определения беспилотным летательным аппаратом, не оснащенным системой TCAS, траектории для уклонения от столкновения с посторонним воздушным судном, содержащий следующие этапы:
- определяют положение постороннего воздушного судна, чтобы определить расстояние, отделяющее беспилотный летательный аппарат от постороннего воздушного судна;
- измеряют угловую скорость постороннего воздушного судна в горизонтальной плоскости;
- определяют, оснащено ли постороннее воздушное судно системой TCAS, и, в этом случае принимают извещение, передаваемое системой TCAS постороннего воздушного судна, и определяют траекторию уклонения.
Таким образом, этот способ позволяет беспилотному летательному аппарату обнаруживать и уклоняться от столкновения с посторонним воздушным судном.
Согласно предпочтительному варианту осуществления траекторию уклонения можно определять в горизонтальной плоскости, что позволяет беспилотному летательному аппарату, маневренность которого не позволяет ему исполнять предписания TCAS, в условиях полной безопасности избегать столкновения с воздушным судном, которое оснащено системой TCAS и может исполнить любое предписание этой системы.
Объектом изобретения является также беспилотный летательный аппарат, оснащенный системой контроля полета, выполненной с возможностью осуществления заявленного способа предупреждения столкновений.
Краткое описание чертежей
Описание представлено со ссылками на прилагаемые чертежи, на которых:
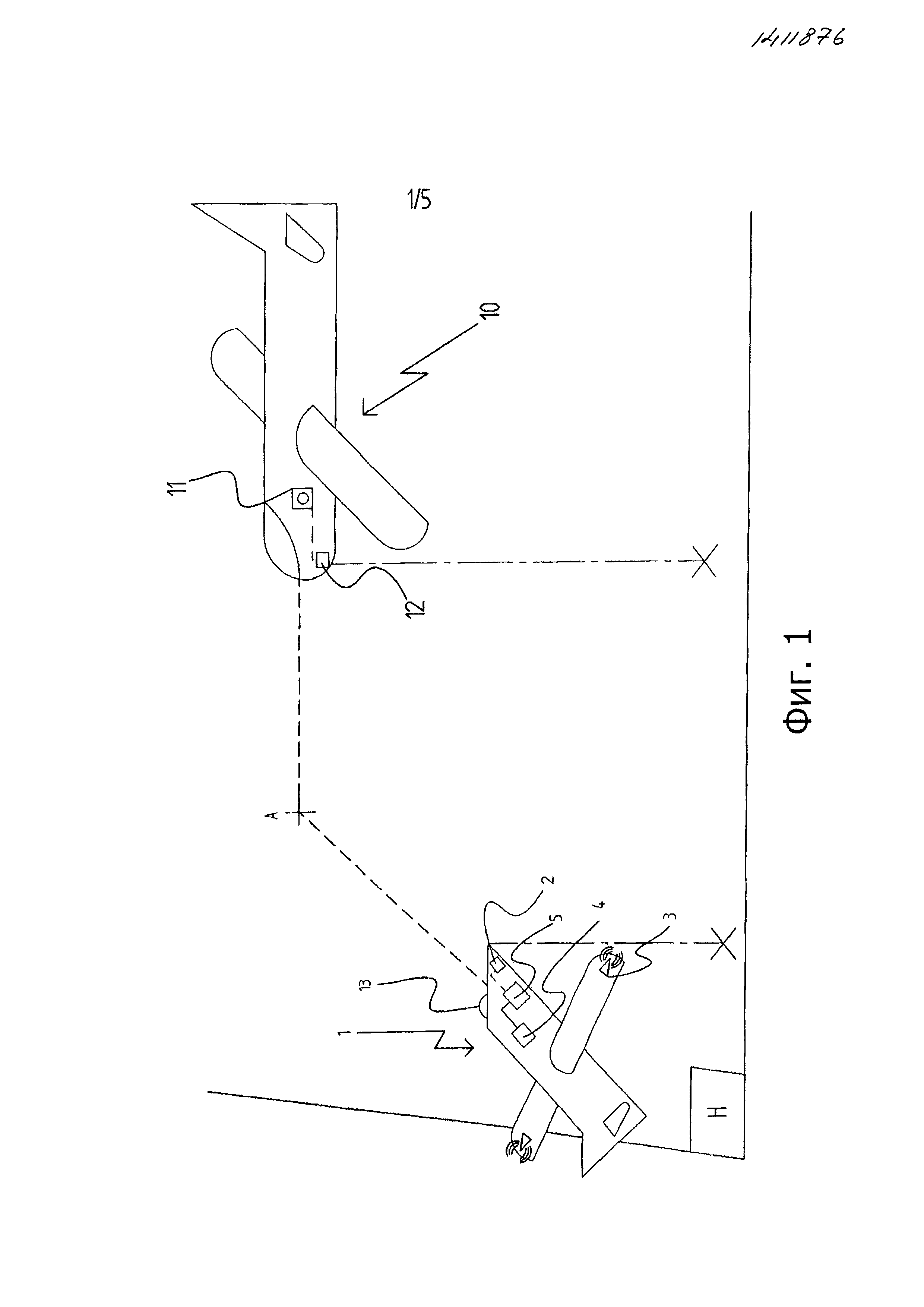
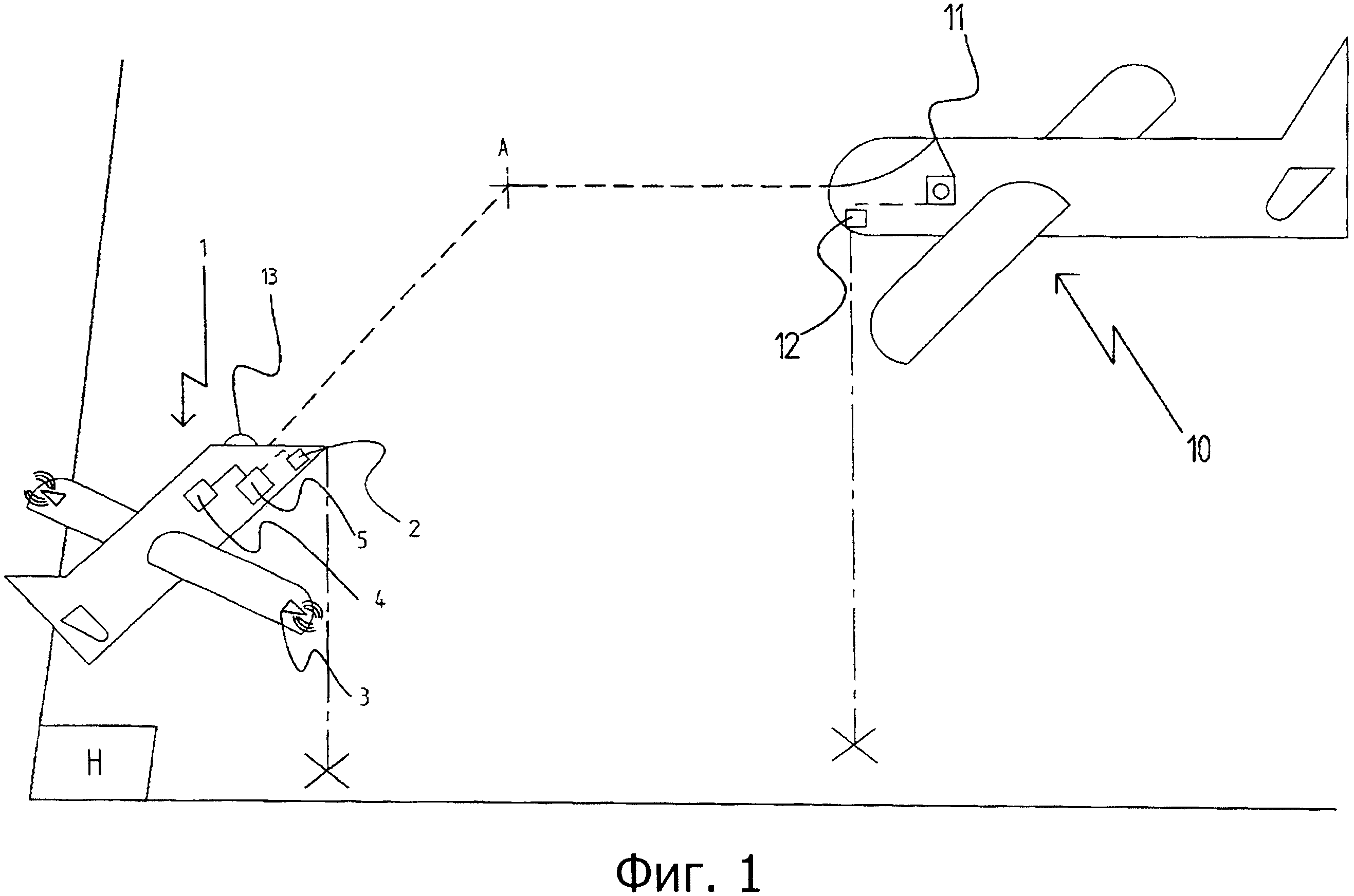
фиг. 1 - схематичный вид в перспективе, иллюстрирующий ситуацию пересечения курсов воздушного судна и беспилотного летательного аппарата в соответствии с изобретением;
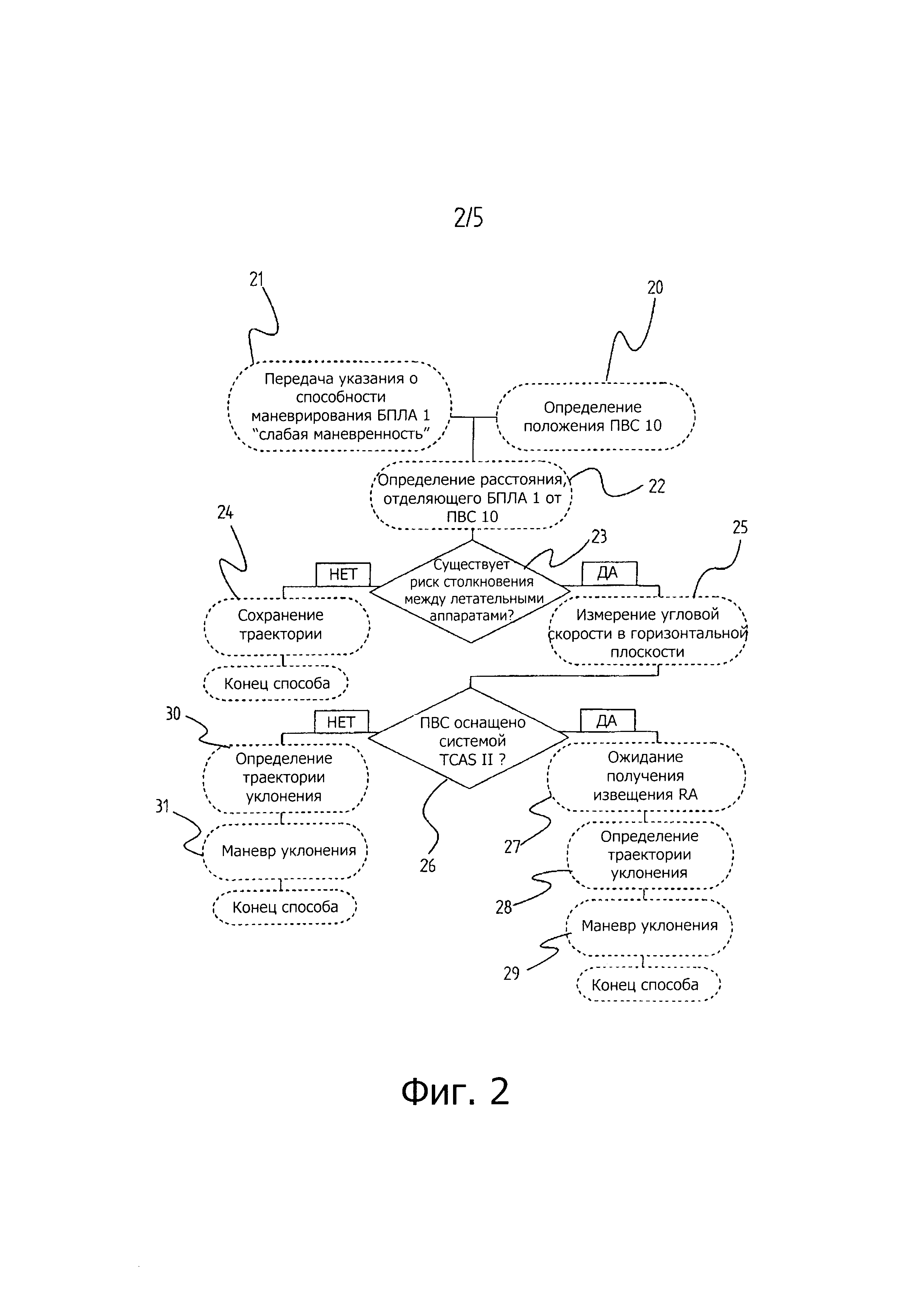
фиг. 2 - логическая блок-схема операций, выполняемых при обнаружении постороннего воздушного судна, согласно первому варианту осуществления изобретения;
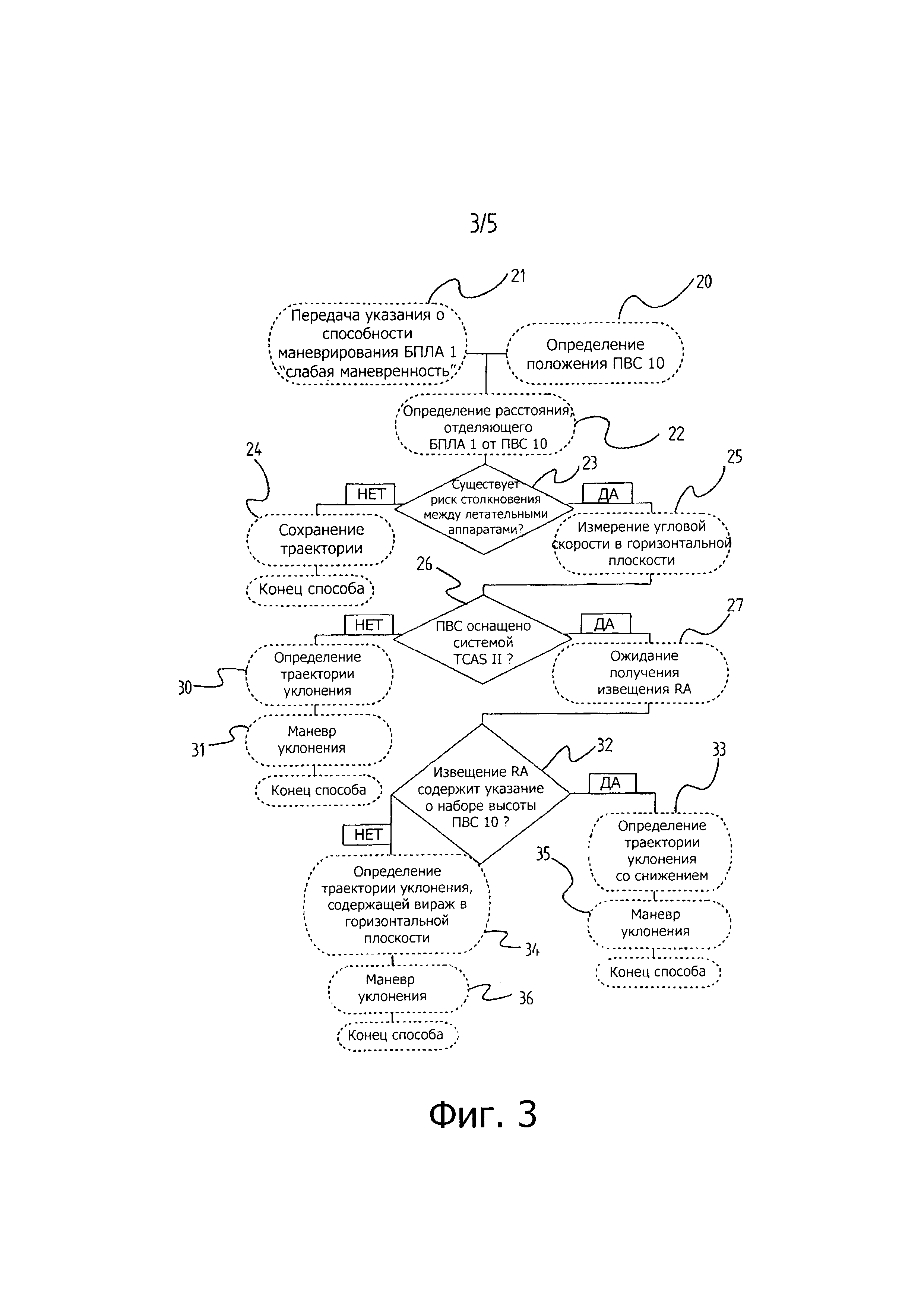
фиг. 3 - логическая блок-схема операций, выполняемых при обнаружении постороннего воздушного судна, согласно второму варианту осуществления изобретения;
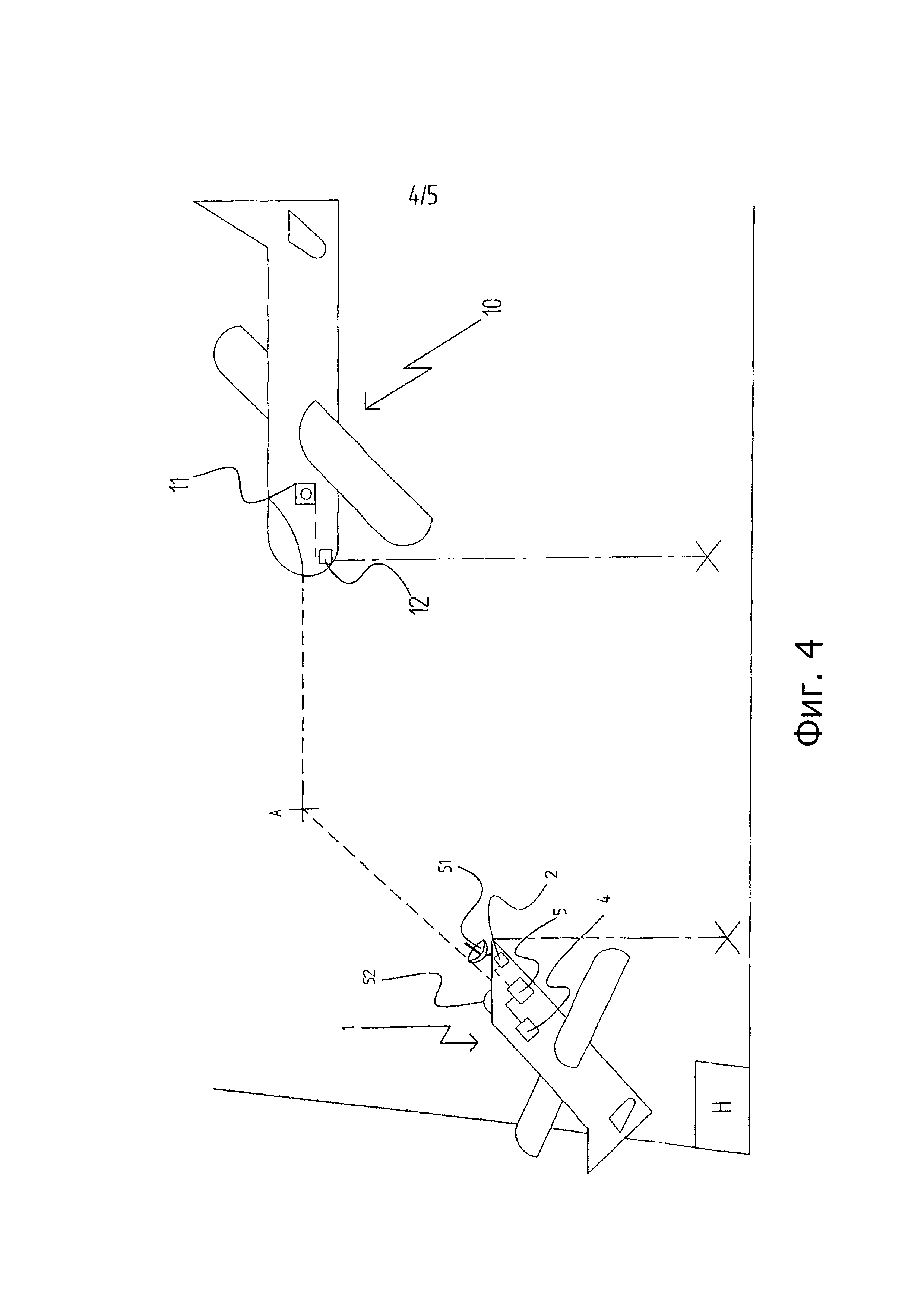
фиг. 4 - схематичный вид в перспективе, иллюстрирующий ситуацию пересечения курсов воздушного судна и беспилотного летательного аппарата, согласно третьему варианту осуществления изобретения;
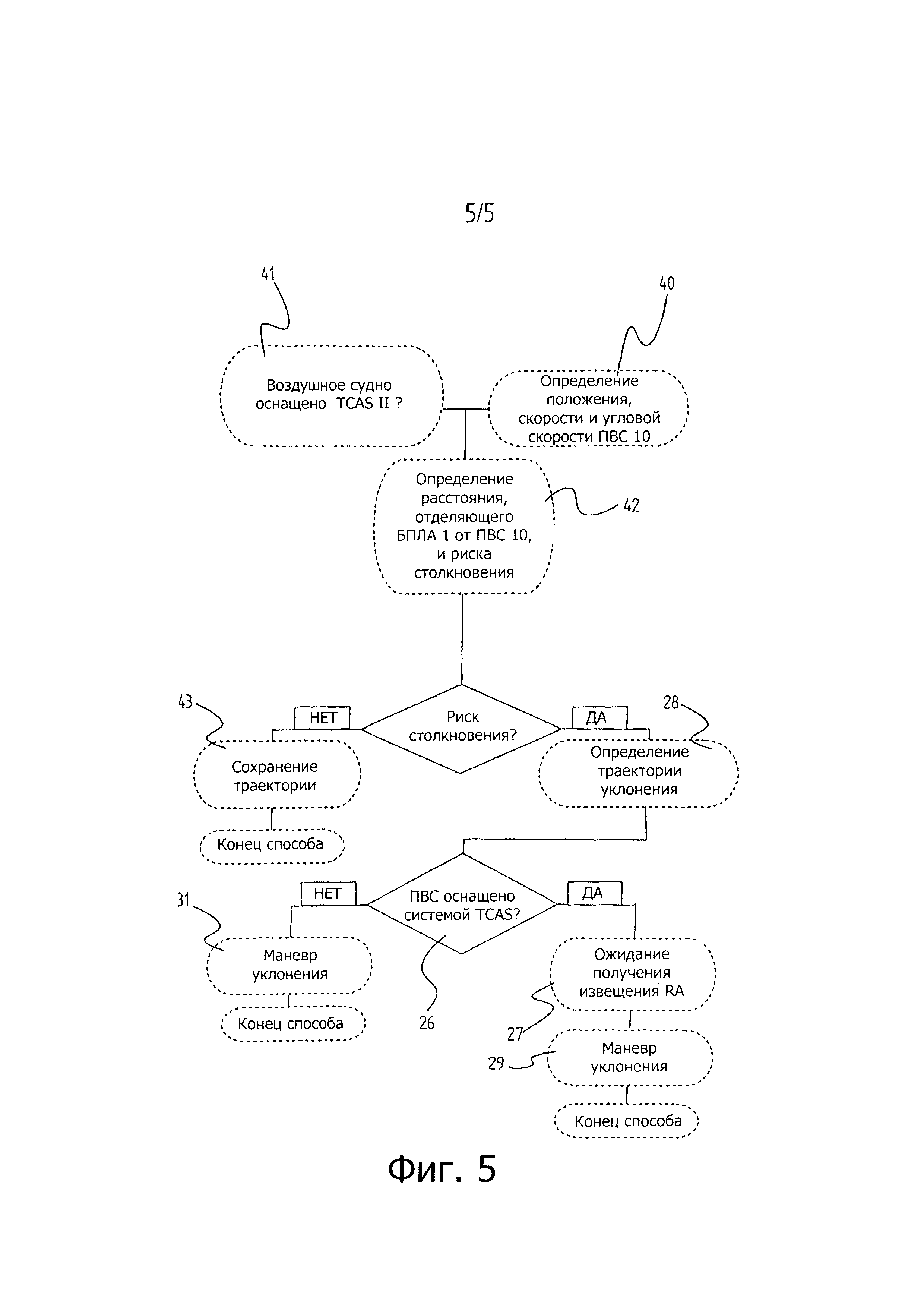
фиг. 5 - логическая блок-схема операций, выполняемых при обнаружении постороннего воздушного судна, согласно варианту осуществления изобретения, показанному на фиг. 4.
Подробное описание вариантов осуществления изобретения
Показанный на фиг. 1 беспилотный летательный аппарат в соответствии с изобретением, обозначенный общей позицией 1, является самолетом, который содержит приемоответчик 2 режима S, запросчик 13 приемоответчика, две гониометрические антенны 3 с емкостной нагрузкой, каждая из которых установлена на одном из крыльев беспилотного аппарата 1, а также автоматическую систему 4 анализа данных, связанную с системой 5 управления полетом, содержащей, в частности, вычислительное устройство. Беспилотный летательный аппарат 1 следует курсом, который в пересекает в точке А траекторию полета постороннего воздушного судна 10, оснащенного системой TCAS II, обозначенной на фигуре позицией 11, связанной с приемоответчиком 12 режима S. На фиг. 1 показана горизонтальная плоскость Н, на которую проецированы положения двух летательных аппаратов 1 и 10.
Автоматическая система 4 анализа данных содержит вычислительный компьютерный блок, выполненный с возможностью исполнения компьютерной программы, осуществляющей способ определения траектории уклонения.
Способ определения беспилотным летательным аппаратом 1 траектории уклонения от столкновения с самолетом 10 описан со ссылками на фиг. 2 и 3. На этих блок-схемах в вытянутых закругленных рамках показаны команды, разрабатываемые системой 4 анализа данных беспилотного летательного аппарата 1, а в ромбовидных рамках - логические операции, осуществляемые этой системой 4 анализа.
При входе постороннего самолета 10 в зону, в которой посторонний самолет 10 принимает сигналы от приемоответчика 2 режима S беспилотного летательного аппарата 1, последний получает данные о положении и курсе постороннего самолета 10 в ответ на сообщение, переданное его приемоответчиком 2. Это соответствует этапу 20 блок-схемы. Параллельно с получением этих данных беспилотный летательный аппарат 10 передает сообщение, указывающее на его способность маневрирования (этап 21). В данном случае беспилотный аппарат указывает «слабая маневренность».
Данные, касающиеся постороннего самолета 10, обрабатываются системой 4 анализа данных, которая определяет расстояние, отделяющее беспилотный летательный аппарат 1 от постороннего самолета 10 (этап 22), а также наличие или отсутствие риска столкновения (этап 23).
Если риск столкновения не обнаружен, беспилотный летательный аппарат сохраняет свою первоначальную траекторию (этап 24).
В случае наличия риска столкновения система 4 анализа производит точное измерение угловой скорости перемещения самолета 10 по отношению к беспилотному аппарату 1 в горизонтальной плоскости H при помощи емкостных гониометрических антенн 3 (этап 25). Определение положения аппарата, передающего радиоволны при помощи средств радио, таких как гониометрические емкостные антенны, само по себе известно.
После определения этой угловой скорости система 4 анализа определяет, располагает ли самолет 10 системой TCAS II (этап 26). Это определение происходит посредством получения или не получения ответа от самолета 10 на первый запрос приемоответчика 2 беспилотного летательного аппарата 1.
Если система обнаруживает, что самолет оснащен системой TCAS II, система 4 ожидает передачи извещения RA (этап 27) от системы TCAS II самолета 10, чтобы определить траекторию уклонения (этап 28) и передать ее для исполнения в систему 5 управления полетом беспилотного летательного аппарата 1 (этап 29). Маневр, соответствующий траектории уклонения, определенной системой 4, начинается после передачи извещения RA посторонним самолетом 10, чтобы не мешать работе системы TCAS II. Действительно, маневр, осуществляемый до того, как система TCAS II постороннего самолета определит решение о предупреждении столкновения, может привести к нарушению функции управления системы TCAS II. Таким образом, исполнение траектории уклонения, определенной беспилотным летательным аппаратом, начинается одновременно с маневром уклонения, соответствующим извещению RA, выданному системой TCAS II самолета 10. Если извещение RA, выданное системой TCAS II постороннего самолета, предусматривает вертикальное уклонение (команда на набор высоту или на снижение), траектория уклонения, определенная системой 4 анализа данных, предпочтительно будет находиться в горизонтальной плоскости в направлении, учитывающем угловую скорость постороннего самолета 10, а также его положение в момент передачи извещения RA. Эта траектория позволяет обеспечить быстрое удаление друг от друга двух летательных аппаратов, в то же время гарантируя, что одновременное осуществление этих двух маневров не может привести к столкновению, поскольку эти маневры происходят в двух направлениях в ортогональных плоскостях.
Если посторонний самолет 10 не ответил на запрос приемоответчика 2 беспилотного летательного аппарата 1, система 4 анализа данных делает вывод, что посторонний самолет 10 не имеет системы TCAS II, и в этом случае определяет траекторию уклонения (этап 30) для исполнения системой 5 управления полетом, как только это станет возможным (этап 31). Эта траектория уклонения может включать в себя маневры в вертикальной плоскости и/или в горизонтальной плоскости. Согласно предпочтительному варианту осуществления траектория уклонения включает в себя поворот вправо в горизонтальной плоскости. Этот маневр отвечает воздушным правилам, применяемым в условиях визуального полета, и соответствует ожидаемой реакции классического воздушного судна в таких условиях.
Следует отметить, что согласно этому варианту осуществления содержание извещения RA не имеет значения и в рамках способа принимается во внимание только факт его передачи.
Далее со ссылками на фиг. 3 следует описание другого варианта осуществления заявленного способа, в случае когда беспилотный летательный аппарат 1 обладает способностью маневрирования при снижении, совместимой с требованиями системы TCAS II (например, скорость снижения, превышающая 500 футов в минуту, то есть около 150 метров в минуту), и когда эта характеристика введена в систему 4 анализа данных, которая должна определить траекторию уклонения. Согласно этому частному варианту осуществления, когда такой беспилотный летательный аппарат 1 встречает постороннее воздушное судно 10, оснащенное системой TCAS II, и когда он обнаруживает риск столкновения, беспилотный летательный аппарат 1, который предварительно обнаружил, что постороннее воздушное судно 10 оснащено системой TCAS II, ожидает передачу извещения RA от системы TCAS II постороннего самолета (этап 27). По получении этого извещения RA система 4 анализа данных анализирует содержание извещения RA, переданного системой TCAS II постороннего самолета 10 (этап 32). Если это извещение RA содержит указание о наборе высоты посторонним самолетом 10, траектория уклонения, определенная системой 4 анализа данных, будет соответствовать снижению (этап 33). В противоположном случае траектория уклонения включает в себя вираж в горизонтальной плоскости (этап 34). Осуществление определенных таким образом маневров происходит сразу же после передачи извещения RA (этапы 35 и 36).
Во всем остальном способ согласно второму варианту осуществления изобретения идентичен способу по первому варианту осуществления изобретения.
Со ссылками на фиг. 4 и 5 представлено описание третьего варианта осуществления заявленного способа. Согласно этому варианту беспилотный летательный аппарат 1 оборудован приемоответчиком 2 режима S, автоматической системой 4 анализа данных, соединенной с системой 5 управления полетом, радаром 51 и только частью «прием» 52 запросчика 13 приемоответчика. При входе постороннего самолета 10 в зону обнаружения радара 51 последний определяет положение постороннего воздушного судна 10, курс, скорость, высоту, а также угловую скорость в горизонтальной плоскости (этап 40). Действительно, не обладая возможностью запроса приемоответчика 12 постороннего самолета 10, беспилотный летательный аппарат 1 может получать данные о его положении только посредством прямого измерения. Параллельно с этими измерениями часть «прием» 52 запросчика 13 приемоответчика находится в состоянии прослушивания радиоэлектрической среды и может прослушивать сообщения, передаваемые посторонним самолетом 10 в ответ на запросы других воздушных судов или наземных пунктов контроля. Эти сообщения могут содержать данные, касающиеся идентификации воздушного судна (передаваемые приемоответчиком режима А), и/или данные, касающиеся его высоты, курса, скорости и наличия на нем системы TCAS (передаваемые приемоответчиком режима С). Это соответствует этапу 41.
По мере сбора этих данных они обрабатываются системой 4 анализа данных, чтобы определить расстояние, отделяющее беспилотный летательный аппарат 1 от постороннего самолета, и наличие или отсутствие риска столкновения (этап 42). Эти данные непрерывно обновляются, и этапы 40-42 повторяются в замкнутом режиме для каждого воздушного судна, входящего в зону действия радара 51. Если риска столкновения не обнаружено, беспилотный летательный аппарат 1 сохраняет свою первоначальную траекторию (этап 43). В случае обнаружения риска столкновения система 4 анализа определяет траекторию уклонения (этап 44) на основе последнего обновления данных о положении и движении постороннего самолета 10. Если беспилотный летательный аппарат 1 определит, что посторонний самолет 10 не оборудован системой TCAS, он сохраняет свою траекторию, пока часть «прием» 52 запросчика 13 приемоответчика не получит извещение RA. В течение этого времени данные о положении воздушного судна, а также этапы 40-42 способа повторяются в замкнутом режиме, чтобы адаптировать маневр уклонения и его надлежащее исполнение к возможным изменениям траектории постороннего воздушного судна 10 или к возможному появлению второго постороннего воздушного судна в зоне действия радара 51.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любую версию, не выходящую за рамки объема изобретения, определенные формулой изобретения.
В частности:
- хотя средства измерения угловой скорости постороннего самолета 10 содержат радиотехнические средства в виде гониометрических емкостных антенн 3 или радара 51, изобретение можно также применять с другими средствами измерения угловой скорости, например с оптронным датчиком, таким как камера, лазерное устройство дистанционного обнаружения (Лидар) или любое другое средство, обеспечивающее измерение угловой скорости для осуществления способа;
- хотя изобретение было описано в связи с уклонением от столкновения с самолетом, изобретение можно также применять для предупреждения столкновений с другими летательными аппаратами, например, такими как дирижабли, планеры или сверхлегкие летательные аппараты ULM;
- хотя указанием, передаваемым беспилотным летательным аппаратом в направлении постороннего самолета, является в данном случае «слабая маневренность», заявленный способ можно также применять с передачей других сообщений о способности маневрирования беспилотного летательного аппарата, например, таких как «беспилотный летательный аппарат», «отсутствие маневренности» или «маневренность только на снижение»; беспилотный летательный аппарат может также не передавать никакого указания такого типа;
- хотя в данном случае определение положения постороннего воздушного судна осуществляют посредством сбора данных, передаваемых его приемоответчиком режима С на запрос беспилотного летательного аппарата, или посредством прямого измерения при помощи радара, изобретение можно также применять с другими средствами определения положения, например с оптронным датчиком, таким как камера, лазерное устройство дистанционного обнаружения (Лидар) или любое другое средство, обеспечивающее определение положения для осуществления способа;
- хотя в данном случае определение того, что постороннее воздушное судно оснащено или не оснащено системой TCAS, осуществляют посредством анализа ответа постороннего самолета на запросы других воздушных судов или наземных пунктов контроля, изобретение можно также применять с другими средствами определения наличия или отсутствия системы TCAS на постороннем воздушном судне, такими как прослушивание при помощи приемника ADS-B;
- хотя в данном случае определение того, что постороннее воздушное судно оснащено или не оснащено системой TCAS, осуществляют во время первого запроса постороннего самолета при помощи приемоответчика беспилотного летательного аппарата, изобретение можно также применять с последующим определением наличия или отсутствия системы TCAS на постороннем воздушном судне, например, в случае прослушивания при помощи приемника ADS-B. Этап определения наличия или отсутствия системы TCAS можно также осуществлять после определения риска столкновения при помощи известных средств, чтобы не перегружать радиоэфир.
Порядок этапов способа можно изменить по сравнению с описанным способом, например, определение наличия системы TCAS на борту постороннего воздушного судна можно осуществлять до определения положения постороннего воздушного судна или до измерения его угловой скорости.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

