Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ПРИЦЕЛЬНОЙ ПО ЧАСТОТЕ ШУМОВОЙ ПОМЕХИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Заявляемое техническое решение относится к области радиолокации и может быть использовано для определения дальности до постановщика помех (ПП).
Большие проблемы работе радиолокационных станций (РЛС) создают шумовые прицельные по частоте активные помехи (АП) [Теоретические основы радиотехники под ред. Я.Д. Ширмана. М.: «Сов. Радио», 1970, с. 424]. В качестве АП может использоваться излучение ПП шумовых или шумоподобных сигналов большой мощности на частоте работы РЛС.
Из уровня техники известен способ определения дальности до ПП [патент RU №2217773], основанный на приеме прямого радиоизлучения ПП и его радиоизлучения, отраженного от объекта, которое коррелировано с прямым радиоизлучением, измерении по положению максимума взаимной корреляционной функции радиоизлучений величины временного сдвига этих радиоизлучений, измерении углов места и азимута источника радиоизлучения, а также дальности до объекта, отражающего радиоизлучение, и вычислении дальности до источника излучения.
Суть способа состоит в том, что определяют время задержки между сигналом, принятым напрямую от ПП, и сигналом, принятым после отражения от объекта по максимуму значения корреляционной функции этих сигналов, и определяют угловые координаты ПП и объекта. Кроме того, в активном режиме работы РЛС определяют дальность до объекта. Полученной информации достаточно для однозначного вычисления дальности до ПП.
Недостаток известного способа определения дальности состоит в том, что он требует наличия двух излучателей - ПП и объекта, определения дальности до объекта, а также сложной аппаратуры для вычисления задержки по максимуму корреляционной функции на большом интервале задержек.
Известен наиболее близкий к предлагаемому по технической сущности способ защиты РЛС от прицельных по частоте шумовых помех [Защита от радиопомех. Максимова Н.В. Сов. Радио, 1976, с. 291-297], основанный на изменении частоты зондирующего сигнала (ЗС) в соседних периодах повторения, приводящем к необходимости (т.е. вынуждающем) изменения частоты помехи.
Этот способ используют для защиты РЛС, изменяя несущую частоту зондирующего сигнала, при действии шумовой прицельной по частоте помехи. Суть его работы состоит в том, что параметры приемника перестраиваются одновременно с изменением частоты ЗС, и он не принимает сигналы с частотой предыдущего зонда, которые являются шумовой помехой.
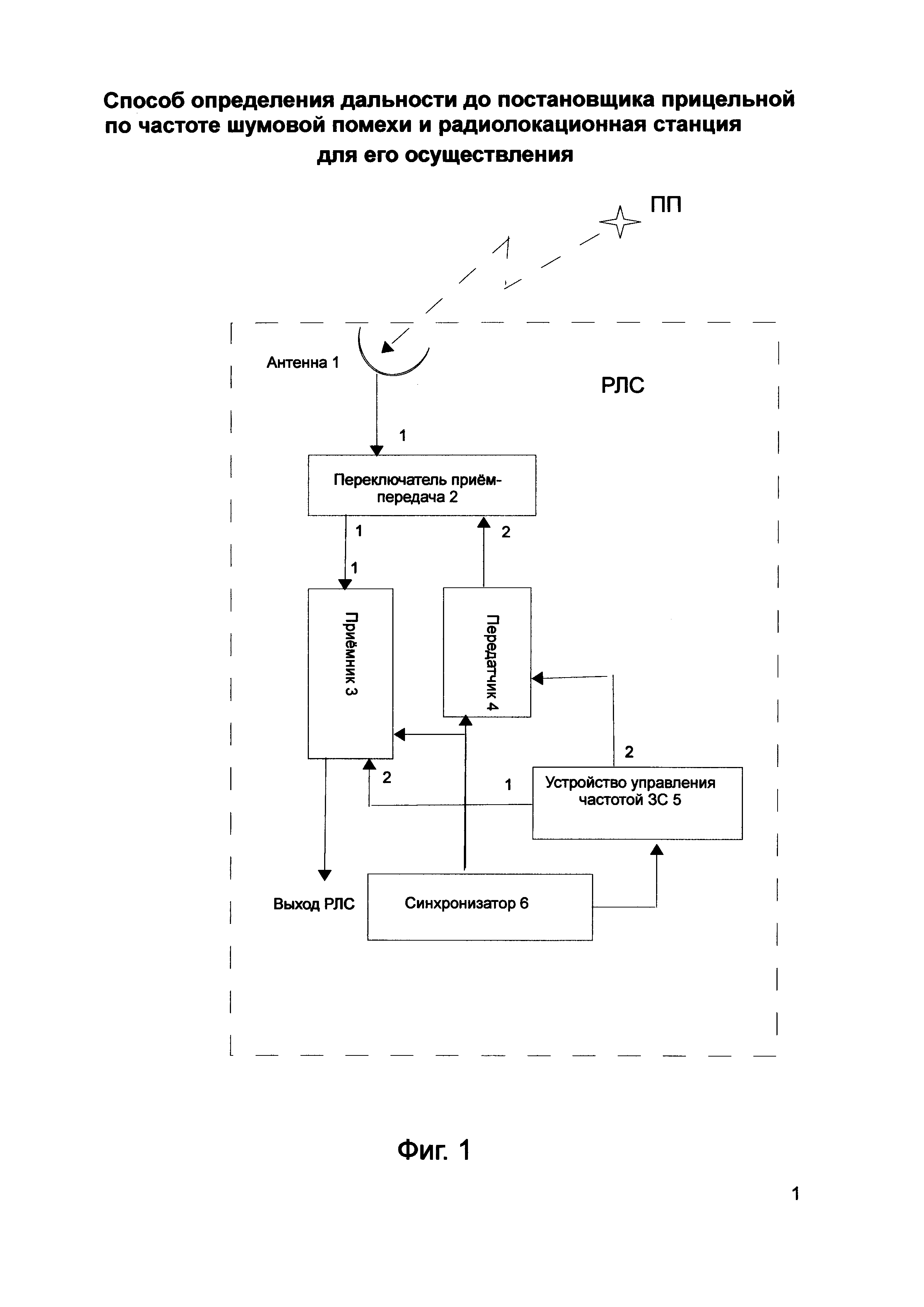
Известна РЛС для осуществления этого способа (Фиг. 1) [там же], принятая за прототип, содержащая антенну 1, переключатель приема-передачи 2, приемник 3, передатчик 4, устройство переключения частоты 5 и синхронизатор 6, выход антенны 1 соединен с первым входом переключателя приема-передачи 2, выход которого соединен с первым входом приемника 3, а его второй вход соединен с выходом передатчика 4, второй вход приемника 3 соединен с первым выходом устройства переключения частоты 5, второй выход которого соединен с входом передатчика 4, выход синхронизатора подключен к синхровходам приемника 3, передатчика 4, переключателя приема-передачи 2 и устройства управления частотой 5, выход приемника является выходом РЛС.
РЛС работает следующим образом.
Сигнал прицельной по частоте шумовой помехи, излученной ПП, поступает с выхода антенны 1 на вход переключателя приема-передачи 2 и далее на первый вход приемника 3. После обнаружения на выходе приемника 3 мощной прицельной по частоте шумовой помехи происходит переключение рабочей частоты ЗС с помощью переключателя частоты ЗС 5, и передатчик 4 генерирует ЗС на новой частоте. Изменение частоты ЗС может происходить ежепериодно. Если реакция ПП в виде включения излучения помехи с измененной частотой или выключения излучения помехи на предыдущей мгновенна, то на дальностях за ПП приемник будет забит прицельными по частоте шумами помехи.
Недостаток наиболее близкого по технической сущности к предлагаемым способу и РЛС состоит в том, что они не измеряют дальности до ПП.
Таким образом поставленной задачей (техническим результатом) является определение дальности до ПП с помощью однопозиционной РЛС.
Поставленная задача (технический результат) решается тем, что в способе определения дальности до постановщика прицельной по частоте шумовой помехи, заключающемся в изменении частоты зондирующего сигнала ЗС РЛС, согласно изобретению измеряют интервал времени Т между моментом излучения ЗС с измененными частотой и моментом обнаружения реакции ПП на это; при этом определяют значение дальности из выражения
D=C(T/2-t)≈CT/2 при t<<T,
где D - дальность до ПП, C - скорость света, t≥0 - время возможной задержки реакции ПП.
Поставленная задача (технический результат) решается также тем, что реакцией ПП считают прекращение постановки помехи на прежней частоте.
Поставленная задача (технический результат) решается также тем, что реакцией ПП считают постановку помехи на измененной частоте.
Поставленная задача (технический результат) решается тем, что в РЛС для осуществления способа определения дальности до постановщика прицельной по частоте помехи, содержащем антенну, переключатель приема-передачи, приемник, передатчик, устройство управления частотой ЗС и синхронизатор, антенна соединена с входом переключателя приема-передачи, первый выход которого соединен с входом приемника, а его второй вход соединен с выходом передатчика, первый выход устройства управления частотой ЗС соединен с со вторым входом приемника, а его второй выход соединен с входом передатчика, выходы синхронизатора соединены с синхровходами приемника, переключателя приема-передачи, передатчика и устройства управления частотой ЗС, выход приемника является выходом РЛС, согласно изобретению введен измеритель интервалов и решающего устройства, его первый вход соединен со вторым выходом приемника, а его второй вход соединен с третьим выходом устройства управления частотой ЗС, синхровход измерителя интервалов и решающего устройства соединен с выходом синхронизатора, выход устройства измерения интервалов и решающего устройства является информационным выходом D дальности до ПП.
Способ и устройство работают следующим образом.
При обнаружении прицельной по частоте шумовой помехи РЛС начинает ежепериодно изменять частоту ЗС, вынуждая ПП изменять частоту помехи. При этом измеряют интервал времени Т между моментом излучения ЗС с измененной частотой и моментом прекращения излучения ПП на предыдущей частоте ЗС. Или измеряют интервал времени между моментом излучения ЗС с измененной частотой и моментом прихода сигнала прицельной по частоте шумовой помехи с измененной частотой. Значение D определяют из выражения
D=С(Т/2-t)≈CT/2 при t<<Т,
где С - скорость света, t≥0 - время реакции ПП на изменение частоты ЗС, т.е. это время от момента принятия ПП ЗС РЛС и до начала излучения на частоте этого ЗС.
С изменением частоты ЗС ПП должен провести анализ параметров ЗС, после чего начать излучение помехи с измененной частотой. В этом случае t будет не меньше длительности сигнала, но во всех случаях t<<T.
Сигналы, излученные ПП, принимаются антенной и поступают на вход переключателя приема-передачи и с его первого выхода поступают на первый вход приемника. Со второго выхода приемника сигналы помехи поступают на вход измерителя интервалов и решающего устройства. Устройство управления частотой сигнала ЗС устанавливает в приемнике режим приема сигналов с измененной и не измененной частотой ЗС при изменении частоты ЗС в передатчике. Этот сигнал через переключатель приема-передачи поступает в антенну и излучается в направлении ПП. ПП определяет частоту ЗС и на этой частоте начинает излучать прицельную по частоте шумовую помеху до прихода ЗС с измененной частотой. После приема сигнала с измененной частотой ПП прекращает излучение на предыдущей частоте и начинает излучение на измененной. Момент перехода излучения ПП с одной частоты на другую фиксируют в измерителе интервалов и решающем устройстве относительно момента излучения ЗС и вычисляют по формуле (1) приближенное значение расстояния до ПП.
Таким образом решается поставленная задача и достигается технический результат.
Изобретение иллюстрируется чертежами.
Фиг. 1 - схема РЛС прототипа;
Фиг. 2 - схема заявляемой РЛС, осуществляющей заявляемый способ.
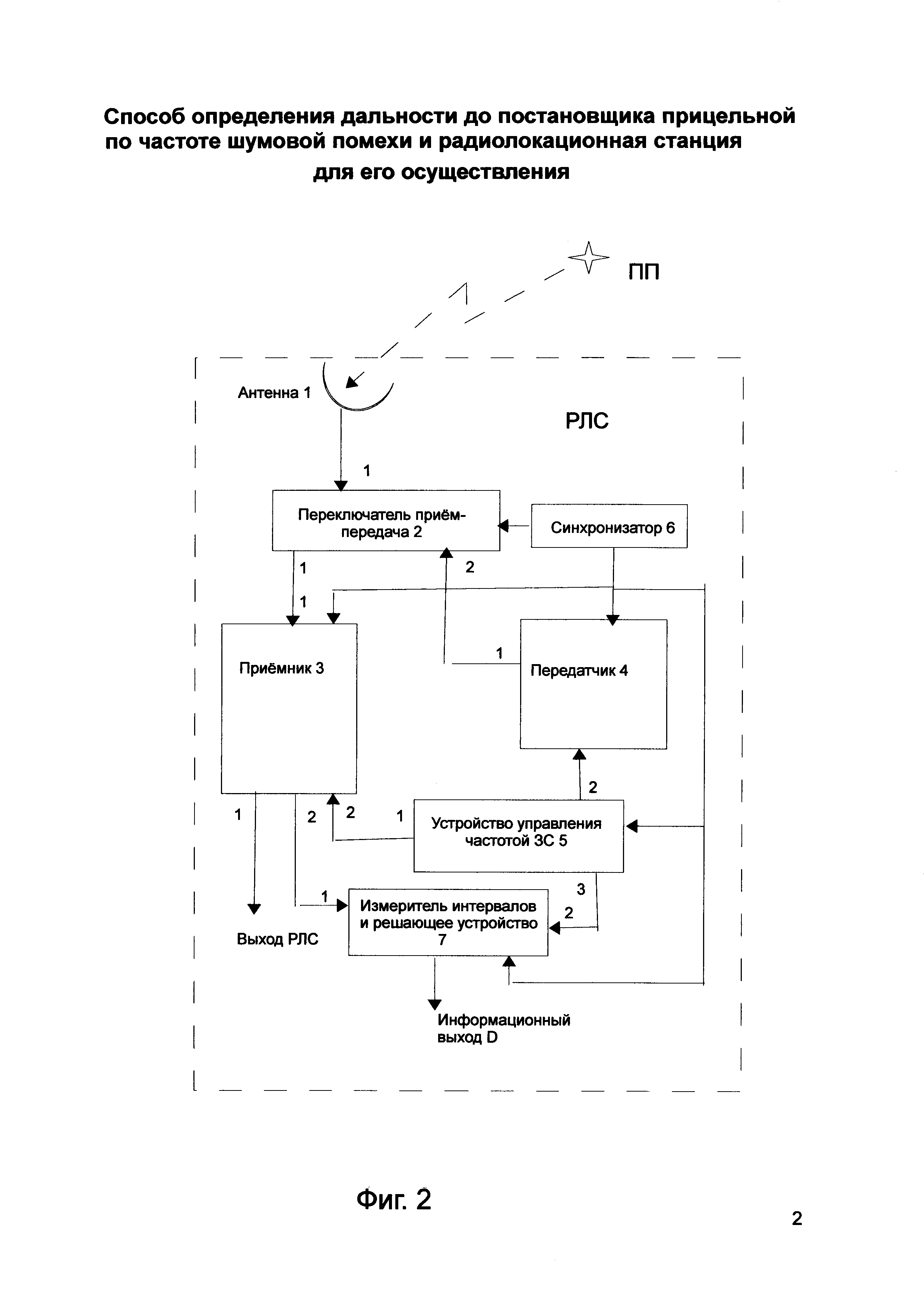
Заявленная РЛС (фиг. 2) содержит антенну 1, переключатель приема-передачи 2, приемник 3, передатчик 4, устройство управления частотой ЗС 5, синхронизатор 6, измеритель интервалов и решающее устройство 7, антенна 1 соединена с первым входом переключателя приема-передачи 2, выход которого соединен с первым входом приемника 3, а его второй вход соединен с выходом передатчика 4, первый выход устройства управления частотой ЗС 5 соединен со вторым входом приемника 3, а его второй выход соединен с входом передатчика 4, выход синхронизатора 6 соединен с синхровходами приемника 3, передатчика 4, устройства управления частотой 5 и измерителем интервалов и решающим устройством 7, его первый вход соединен со вторым выходом приемника 3, а его второй вход соединен с третьим выходом устройства управления частотой ЗС 5, выход измерителя интервалов и решающего устройства 7 является информационным выходом по дальности D до ПП, а первый выход приемника 3 является выходом РЛС.
Рассмотрим более подробно работу заявленной РЛС (фиг. 2), осуществляющей заявленный способ.
Сигналы прицельной по частоте шумовой помехи, излученные ПП, принимаются антенной 1 и поступают на вход переключателя приема-передачи 2 и с его первого выхода поступают на первый вход приемника 3. С выхода приемника 3 сигналы прицельной по частоте шумовой помехи поступают на вход измерителя интервалов и решающего устройства 7. Устройство управления частотой сигнала ЗС 5 устанавливает режим приема сигналов на измененной и не измененной (предыдущей) частоте ЗС при изменении частоты ЗС в передатчике 4. Этот сигнал через переключатель приема-передачи поступает в антенну 1 и излучается в направлении ПП. ПП определяет частоту ЗС и на этой частоте начинает излучать прицельную по частоте шумовую помеху до прихода ЗС с измененной частотой. После приема сигнала с измененной частотой ПП прекращает излучение на предыдущей частоте и начинает излучение на измененной. Момент перехода излучения ПП с одной частоты на другую фиксируют в измерителе интервалов и решающем устройстве 7 относительно момента излучения ЗС и определяют расстояние D до ПП по формуле (1).
Таким образом решается поставленная задача и достигается технический результат.
Способ радиолокационного обзора пространства
Способ радиолокационного обзора пространства (варианты)
Способ радиолокационного обзора пространства и радиолокационная станция для его осуществления
Способ помехового подавления радиолокационной станции
Способ распознавания ложной траектории, формируемой синхронной ответной помехой
Способ определения дальности до постановщика импульсной помехи (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ распознавания ложных сигналов
Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления
Способ радиолокационного обзора пространства
Способ радиолокационного обзора пространства (варианты)
Способ радиолокационного обзора пространства и радиолокационная станция для его осуществления
Способ помехового подавления радиолокационной станции
Способ распознавания ложной траектории, формируемой синхронной ответной помехой
Способ определения дальности до постановщика импульсной помехи (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ распознавания ложных сигналов
Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления
Способ радиолокационного обзора пространства
Способ двухэтапного радиолокационного обзора пространства (варианты)

