Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА КОНТУРА ОБРАТНОЙ СВЯЗИ ПРИВОДНОЙ СИСТЕМЫ ПЕРЕМЕННЫХ ГЕОМЕТРИЙ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к общей области авиации.
В частности, оно касается мониторинга контура обратной связи приводной системы переменных геометрий турбореактивного двигателя, которым оборудован летательный аппарат.
Под «переменными геометриями» в данном случае следует понимать размеры, формы и/или положения органов двигателя и/или положения или скорости органов агрегатов, отличных от вращающихся органов двигателя, которые можно менять в зависимости от обнаруженных событий или от режимов двигателя. Примерами «переменных геометрий» являются углы установки лопаток статора с регулируемым углом установки для направляющего аппарата компрессора, положения разгрузочных вентилей компрессора, зазоры в вершинах турбинных лопаток и положения топливного дозатора.
Традиционно эти изменения размеров, форм или положений осуществляют гидравлические приводные системы, использующие топливо в качестве рабочей жидкости. Этими приводными системами управляет электронный модуль регулирования ECU (Electronic Control Unit) или полностью автономный электронно-цифровой контроллер двигателя летательного аппарата (или FADEC от “Full Authority Digital Engine Control”) таким образом, чтобы адаптировать переменные геометрии к сценарию полета (или полетной задачи) летательного аппарата. Управление осуществляют при помощи контуров обратной связи.
Таким образом, понятно, что мониторинг приводных систем переменных геометрий в турбореактивном двигателе является важнейшей задачей с точки зрения обеспечения работы и КПД турбореактивного двигателя.
Деградация работы этих приводных систем выражается, в частности, в положениях и/или размерах органов турбореактивного двигателя, не соответствующих командам блока ECU в установившемся режиме, или в медленной реакции этих органов на команды в переходном режиме. Эти деградации являются предвестниками неисправности. Как правило, на первой стадии их компенсируют при помощи контуров обратной связи приводных систем или, что протекает без существенных последствий, посредством переконфигурирования приводных систем (например, смена активного канала управления).
Однако после некоторого периода времени, если деградации остаются и усугубляются, они уже не поддаются компенсации и могут привести к снижению характеристик или к невозможности работы турбореактивного двигателя. В этом случае система регулирования ECU выдает сообщение о неисправности.
Понятно, что обнаружение этих повреждений является слишком запоздалым, так как оно осуществляется только тогда, когда приводная система вышла из строя.
Таким образом, существует потребность в разработке эффективного способа мониторинга контуров обратной связи приводных систем переменных геометрий турбореактивного двигателя, в частности, чтобы можно было выдавать уведомление технического обслуживания этих приводных систем до того, как турбореактивный двигатель выйдет из строя или станет не эффективным, стараясь при этом свести к минимуму число бесполезных и несвоевременных операций обслуживания.
Например, документ FR 2939924 и не опубликованный на сегодняшний день документ FR 1058681 описывают методики обнаружения неисправностей в двигателе летательного аппарата, включающие в себя оценку множества индикаторов.
Документ “Hydraulic Actuation Loop Degradation Diagnosis and Prognosis”, E. Diez-Liedo, J. Aguilar-Martin, J-R. Massé, A. Sif et E. Griful, 1st CEAS European Air and Space Conference, 2007 рассматривает использование методик диагностики и прогнозирования для мониторинга контура обратной связи систем привода лопаток статора с переменным углом установки.
ОБЪЕКТ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение призвано, в частности, удовлетворить эту потребность и предложить способ мониторинга контура обратной связи приводной системы переменных геометрий турбореактивного двигателя, которым оборудован летательный аппарат, причем эта приводная система содержит сервоклапан, управляющий первым и вторым силовыми цилиндрами. Согласно изобретению, способ мониторинга содержит:
- этап оценки множества параметров мониторинга на основании данных работы контура обратной связи, причем эти параметры мониторинга выбирают, по меньшей мере, из одной из следующих категорий параметров:
категория параметров, характеризующих положение силовых цилиндров;
категория параметров, характеризующих скорость силовых цилиндров;
категория параметров, характеризующих коэффициенты авторегрессионных моделей, используемых для прогнозирования положения силовых цилиндров в зависимости от тока управления сервоклапаном; и
категория параметров, характеризующих ток управления сервоклапаном или интегральный ток контура обратной связи;
- этап получения множества индикаторов на основании параметров мониторинга;
- этап определения, по меньшей мере, одной сигнатуры на основании значений, по меньшей мере, части индикаторов; и
- этап обнаружения и локализации деградации, влияющей на контур обратной связи, в зависимости от указанной, по меньшей мере, одной определенной сигнатуры.
Соответственно, объектом изобретения является также устройство мониторинга контура обратной связи приводной системы переменных геометрий турбореактивного двигателя, которым оборудован летательный аппарат, причем эта приводная система содержит сервоклапан, управляющий первым и вторым силовыми цилиндрами. Согласно изобретению, устройство мониторинга содержит:
- средства оценки множества параметров мониторинга на основании данных работы контура обратной связи, причем эти параметры мониторинга выбирают, по меньшей мере, из одной из следующих категорий параметров:
категория параметров, характеризующих положение силовых цилиндров;
категория параметров, характеризующих скорость силовых цилиндров;
категория параметров, характеризующих коэффициенты авторегрессионных моделей, используемых для прогнозирования положения силовых цилиндров в зависимости от тока управления сервоклапаном; и
категория параметров, характеризующих ток управления сервоклапаном или интегральный ток контура обратной связи;
- средства получения множества индикаторов на основании параметров мониторинга;
- средства определения, по меньшей мере, одной сигнатуры на основании значений, по меньшей мере, части индикаторов; и
- средства обнаружения и локализации деградации, влияющей на контур обратной связи, в зависимости от указанной, по меньшей мере, одной определенной сигнатуры.
Таким образом, изобретение предлагает надежные способ и устройство мониторинга контура обратной связи приводной системы переменных геометрий. Такая приводная система является, например, приводной системой переменных геометрий, выбираемых среди:
- углов установки лопаток статора с регулируемым углом установки для направляющих аппаратов компрессора,
- расхода топлива,
- зазоров в вершинах лопаток турбины высокого давления или низкого давления, и
- положений разгрузочного клапана компрессора турбореактивного двигателя.
Следует отметить, что в рамках изобретения деградация, влияющая на контур обратной связи, может обозначать любой тип дефекта или повреждения, влияющего на этот контур обратной связи. Собственно говоря, речь идет о предвестниках неисправности, то есть деградация, следствием которой, если она сохраняется и усугубляется, может стать выход из строя или снижение эффективности турбореактивного двигателя.
Предпочтительно изобретение обеспечивает не только прогнозирование неисправностей, которые могут влиять на контур обратной связи, но также их локализацию (например, на уровне управления контуром обратной связи, схемы считывания реально применяемых команд и т.д.), в частности, благодаря использованию сигнатур (или симптомов), характеризующих работу контура обратной связи, за заранее определенный период времени.
В этом случае можно генерировать целевое превентивное уведомление технического обслуживания, касающееся приводной системы, позволяющее, с одной стороны, упредить неисправность турбореактивного двигателя и, с другой стороны, целенаправленно вмешаться в приводную систему.
Таким образом, за счет улучшения мониторинга приводной системы изобретение позволяет избежать избыточного и бесполезного обслуживания турбореактивного двигателя, одновременно обеспечивая возможность его работы и производительность. При этом изобретение позволяет сократить расходы на обслуживание и на топливо.
В варианте выполнения изобретения, по меньшей мере, один из параметров оценивают на основании авторегрессионной модели, зависящей, по меньшей мере, от одной экзогенной переменной, выбираемой среди:
- давления воздуха камеры сгорания турбореактивного двигателя;
- дозированного расхода топлива, по меньшей мере, в одной форсунке камеры сгорания турбореактивного двигателя; и
- скорости вращения вала высокого давления турбореактивного двигателя.
Использование авторегрессионной модели позволяет применять предсказательный мониторинг приводной системы, то есть не только диагностировать неисправности приводной системы, но также прогнозировать их изменение и их развитие в течение срока службы турбореактивного двигателя. Этот признак может, таким образом, способствовать рациональному обслуживанию турбореактивного двигателя в зависимости от серьезности неисправности.
Кроме того, авторегрессионную модель или авторегрессионные модели можно корректировать в зависимости от условий окружающей среды турбореактивного двигателя. Поэтому, чтобы в полной мере использовать преимущества заявленного способа, нет необходимости добиваться равнозначных условий с точки зрения давления воздуха в камере сгорания турбореактивного двигателя, дозированного расхода топлива в форсунке или форсунках камеры сгорания и/или скорости вращения вала высокого давления турбореактивного двигателя.
Наоборот, изобретение позволяет адаптировать динамику рассматриваемой(ых) авторегрессионной модели или авторегрессионных моделей, например, в зависимости:
- от расхода топлива, обеспечиваемого топливным насосом, который зависит от скорости вращения вала высокого давления турбореактивного двигателя;
- от сопротивления воздуха на кинематике, зависящего от давления воздуха в камере сгорания турбореактивного двигателя; и/или
- от расхода, имеющегося для приводной системы и зависящего от дозированного расхода топлива в форсунках камеры сгорания турбореактивного двигателя.
Таким образом, авторегрессионные модели, используемые для оценки параметров, являются более точными и позволяют избежать ложных тревог, связанных с изменением коэффициентов авторегрессионной модели или авторегрессионных моделей по причине изменения этих окружающих условий.
Категория параметров, характеризующих положение силовых цилиндров, может содержать, например, по меньшей мере, один из следующих параметров:
- параметр, характеризующий измеренное моментальное положение первого силового цилиндра;
- параметр, характеризующий измеренное моментальное положение второго силового цилиндра;
- параметр, характеризующий прогноз положения первого силового цилиндра;
- параметр, характеризующий прогноз положения второго силового цилиндра;
- параметр, характеризующий прогноз общего положения силового цилиндра.
Предпочтительно в этом варианте выполнения множество индикаторов включает в себя:
- индикатор i_EVS, представляющий нормализованное среднее квадратичное отклонение между параметром, характеризующим прогноз общего положения силового цилиндра, и моментальным общим положением силовых цилиндров;
- индикатор i_EVA, представляющий нормализованное среднее квадратичное отклонение между параметром, характеризующим измеренное моментальное положение первого силового цилиндра, и параметром, характеризующим прогноз положения первого силового цилиндра;
- индикатор i_EVB, представляющий нормализованное среднее квадратичное отклонение между параметром, характеризующим измеренное моментальное положение второго силового цилиндра, и параметром, характеризующим прогноз положения второго силового цилиндра;
- индикатор i_CID, определяемый в зависимости от параметра, характеризующего средний ток управления сервоклапаном, нормализованного по параметру, характеризующему контрольный ток управления; и
- индикатор i_CINT, определяемый в зависимости от параметра, характеризующего средний интегральный ток контура обратной связи, нормализованного по параметру, характеризующему контрольный интегральный ток.
Эти индикаторы способствуют надежному мониторингу и позволяют существенно сократить ложные тревоги в том, что касается обнаружений деградаций «механического» типа приводной системы и прогнозирования неисправностей.
Под «деградацией механического типа приводной системы» в рамках изобретения следует понимать то, что деградированным оказывается механический элемент приводной системы (например, износ механической детали, такой как привод крутящего момента).
В частности, вышеуказанные индикаторы позволяют надежно обнаруживать механические деградации приводной системы, например, такие как сдвиг тока управления одного из силовых цилиндров, перекрывание диафрагмы охлаждения одного из силовых цилиндров, внутренний износ корпуса одного из силовых цилиндров, который может привести к увеличению его внутренней утечки.
Согласно варианту выполнения, положение первого силового цилиндра, соответственно второго силового цилиндра измеряют при помощи датчика положения, содержащего вторичные обмотки, при этом эффективные напряжения вторичных обмоток зависят от положения силового цилиндра, и множество индикаторов включает в себя:
- индикатор i_EPA, характеризующий отклонение предсказания положения первого силового цилиндра;
- индикатор i_EPB, характеризующий отклонение предсказания положения второго силового цилиндра;
- индикатор i_SOMA, определяемый в зависимости от параметра, представляющего среднее значение суммы эффективных напряжений вторичных обмоток датчика положения первого силового цилиндра, нормализованного по параметру, характеризующему среднее контрольное положение первого силового цилиндра;
- индикатор i_SOMB, определяемый в зависимости от параметра, представляющего среднее значение суммы эффективных напряжений вторичных обмоток датчика положения второго силового цилиндра, нормализованного по параметру, характеризующему среднее контрольное положение второго силового цилиндра;
- индикатор i_EWRAP, характеризующий среднее отклонение между током управления сервоклапаном и измеренным обратным током управления.
Эти индикаторы способствуют надежному мониторингу. Они позволяют существенно сократить ложные тревоги, касающиеся обнаружения деградаций «электрического» типа приводной системы, например, таких как неплотные контакты на цепях управления или измерения силовых цилиндров, а также прогнозирования неисправностей.
Кроме того, эти индикаторы способствуют идентификации и локализации деградированных компонентов в контуре обратной связи: силового цилиндра, сервоклапана, гидромеханического блока (HMU, Hydro Mechanical Unit), содержащего сервоклапан, электрических проводов (известных также под названием жгутов), передающих ток управления или индикации положения, и т.д.
В ДРУГОМ ВАРИАНТЕ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ:
- этапы оценки параметров мониторинга и получения индикаторов применяют для каждого полета из множества последовательных полетов летательного аппарата;
- в ходе этапа оценки оценивают параметр мониторинга, характеризующий ток управления сервоклапаном приводной системы и, по меньшей мере, один параметр мониторинга, характеризующий скорость силового цилиндра;
- в ходе этапа получения индикаторы получают посредством анализа изменений, упомянутого, по меньшей мере, одного параметра мониторинга, характеризующего скорость силового цилиндра, в зависимости от параметра мониторинга, характеризующего ток управления;
- в ходе этапа определения упомянутую, по меньшей мере, одну сигнатуру определяют на основании индикаторов, полученных за множество последовательных полетов летательного аппарата, и она характеризует изменение этих индикаторов в ходе этих полетов; и
- этап обнаружения включает в себя этап сравнения упомянутой, по меньшей мере, одной сигнатуры, по меньшей мере, с одной контрольной сигнатурой, соответствующей, по меньшей мере, одной заранее определенной деградации, которая может повлиять на контур обратной связи.
Соответственно в этом варианте выполнения устройство мониторинга отличается тем, что:
- средства оценки параметров мониторинга и средства получения индикаторов активируются для каждого полета из множества последовательных полетов летательного аппарата;
- средства оценки выполнены с возможностью оценки параметра мониторинга, характеризующего ток управления сервоклапаном приводной системы и, по меньшей мере, одного параметра мониторинга, характеризующего скорость силового цилиндра приводной системы;
- средства получения выполнены с возможностью получения индикаторов посредством анализа изменений, упомянутого, по меньшей мере, одного параметра мониторинга, характеризующего скорость силового цилиндра, в зависимости от параметра мониторинга, характеризующего ток управления;
- средства определения упомянутой, по меньшей мере, одной сигнатуры выполнены с возможностью определения упомянутой, по меньшей мере, одной сигнатуры на основании индикаторов, полученных за множество последовательных полетов летательного аппарата, при этом упомянутая, по меньшей мере, одна сигнатура характеризует изменение этих индикаторов в ходе этих полетов; и
- средства обнаружения включают в себя средства сравнения упомянутой, по меньшей мере, одной сигнатуры, по меньшей мере, с одной контрольной сигнатурой, соответствующей, по меньшей мере, одной заранее определенной деградации, которая может повлиять на контур обратной связи.
В этом варианте выполнения нас преимущественно интересует обнаружение деградаций типа «механических». Например, в случае контура обратной связи приводной системы, управляющего изменением углов установки лопаток статора с регулируемым углом установки (VSV, Variable Stator Vane), такая механическая деградация может привести к отклонению тока покоя сервоклапана приводной системы (по причине износа механических деталей приводной системы, в частности, таких как привод крутящего момента) или к утечке между камерами силового цилиндра приводной системы (называемой также междукамерной утечкой).
Предпочтительно изобретением предлагается предсказательный мониторинг приводной системы, основанный на отслеживании во времени (то есть, на нескольких последовательных полетах летательного аппарата) привилегированных индикаторов, построенных на основании данных работы контура обратной связи, измеряемых во время этих полетов.
Согласно изобретению, эти привилегированные индикаторы получают посредством анализа изменений, по меньшей мере, одного так называемого параметра мониторинга, характеризующего скорость силового цилиндра приводной системы, в зависимости от параметра мониторинга, характеризующего ток управления сервоклапаном приводной системы. Значения этих параметров мониторинга оценивают на основании данных работы, измеренных во время рассматриваемых последовательных полетов.
Следует отметить, что под параметром мониторинга, характеризующим скорость силового цилиндра приводной системы, следует понимать любой тип параметра, эквивалентный скорости силового цилиндра. Так, речь может идти о скорости отдельного силового цилиндра приводной системы или, если приводная система содержит несколько силовых цилиндров, - скорости, производной от общего положения, оцениваемого при помощи исправных каналов приводной системы.
Действительно, авторы изобретения установили, что изучение этих параметров мониторинга и вытекающих из них индикаторов позволяет не только обнаруживать механические деградации, влияющие на контур обратной связи, но также различать деградации относительно друг друга, то есть идентифицировать, на каких элементах они проявляются, иначе говоря, осуществлять их локализацию (сервоклапан или силовой(ые) цилиндр(ы) и, в случае необходимости, на каком(их) силовом(ых) цилиндре(ах)). Таким образом, изобретение является особенно примечательным тем, что оно предлагает надежный мониторинг контура обратной связи приводной системы, основанный на датчиках, уже присутствующих на летательном аппарате.
Для этого изобретение применяет, в частности, сравнение, по меньшей мере, одной сигнатуры, характеризующей изменение во времени индикаторов, получаемых на основании этих параметров, с контрольными сигнатурами, соответствующими заранее определенным деградациям.
Предпочтительно в этом варианте выполнения изобретения, по меньшей мере, один полученный индикатор соответствует характеристике, по меньшей мере, одной кривой, моделирующей изменения упомянутого, по меньшей мере, одного параметра, характеризующего скорость силового цилиндра, в зависимости от параметра, характеризующего ток управления сервоклапаном.
В рамках изобретения под характеристикой кривой следует понимать любой элемент, который может характеризовать всю или часть этой кривой, как, например, конкретную точку этой кривой, или ее абсциссу, или ее ординату, коэффициент направления части этой кривой и т.д.
Преимуществом таких индикаторов является их низкая чувствительность к окружающим условиям, в которых измеряют рабочие данные. Поэтому при таких индикаторах, чтобы использовать преимущества способа согласно изобретению, нет необходимости стараться применить равнозначные условия, в частности, с точки зрения давления воздуха в камере сгорания турбореактивного двигателя, дозированного расхода топлива в форсунке или форсунках камеры сгорания и/или скорости вращения вала высокого давления турбореактивного двигателя, или нормализовать эти индикаторы по отношению к этим окружающим условиям.
Кроме того, мониторинг, предлагаемый изобретением на основе этих индикаторов, имеет преимущество, являясь робастным по отношению к внешним усилиям, прикладываемым к одному и/или другому из силовых цилиндров (например, радиальная или осевая нагрузка, прикладываемая к штоку силового цилиндра или силовых цилиндров).
В предпочтительном варианте выполнения получают следующие индикаторы:
- ток покоя или равновесия контура обратной связи: этот ток соответствует току управления сервоклапаном, когда скорость силового цилиндра или силовых цилиндров является нулевой; и
- абсцисса или ордината, по меньшей мере, одной точки, для которой наблюдают изменение крутизны с двух сторон от этой точки.
По сути дела эти индикаторы связаны с местонахождением точки равновесия привода крутящего момента сервоклапана, то есть части сервоклапана, которая преобразует ток управления (иначе говоря, электрическую мощность) в перемещение силовых цилиндров (иначе говоря, в механическую мощность) за счет электромагнитного эффекта. Отслеживание местонахождения этой точки равновесия (и, следовательно, индикаторов) в ходе последовательных полетов летательного аппарата позволяет идентифицировать, изменились ли характеристики контура обратной связи и, в случае необходимости, определить, что приводная система вышла из своего нормального состояния.
Таким образом, изобретение обеспечивает относительно простой мониторинг контура обратной связи, поскольку он основан на относительно ограниченном числе индикаторов. Кроме того, вышеупомянутые индикаторы способствуют надежному мониторингу контура обратной связи и позволяют существенно сократить ложные тревоги в том, что касается обнаружения механических деградаций приводной системы и прогнозирования неисправностей.
В другом варианте выполнения изобретения в качестве индикатора дополнительно получают, по меньшей мере, один коэффициент направления прямой, полученной путем линейной регрессии точек, используемых для построения кривой.
Получение такого(их) индикатора(ов) позволяет повысить надежность мониторинга, осуществляемого в рамках изобретения.
В других вариантах выполнения можно предусмотреть, чтобы способ и устройство мониторинга в соответствии с изобретением имели все или часть вышеупомянутых признаков.
В частном варианте выполнения различные этапы способа мониторинга определены в командах компьютерных программ.
Следовательно, объектом изобретения является также компьютерная программа на носителе информации, причем эту программу можно применять в устройстве мониторинга или, в целом, в компьютере, причем эта программа содержит команды, адаптированные для осуществления этапов описанного выше способа мониторинга.
Эта программа может использовать любой язык программирования и может быть выполнена в виде исходного кода, объектного кода или в виде промежуточного кода между исходным кодом и объектным кодом, например, в компилированном виде или в любом другом требуемом виде.
Объектом изобретения является также носитель информации, считываемый компьютером и содержащий команды вышеупомянутой компьютерной программы.
Носитель информации может быть любым элементом или устройством, выполненным с возможностью записи на нем программы. Например, носитель может содержать средство хранения данных, такое как ROM, например, CD-ROM или ROM микроэлектронной схемы, или магнитное средство записи, например, дискета (floppy disc) или жесткий диск.
С другой стороны, носитель информации может быть передаваемым носителем, таким как электрический или оптический сигнал, который может проходить по электрическому или оптическому проводу, по радио или при помощи других средств. Программу в соответствии с изобретением можно, в частности, загружать через сеть типа Интернет.
В альтернативном варианте носитель информации может быть интегральной схемой, в которой установили программу, при этом схема выполнена с возможностью исполнения или участия в исполнении рассматриваемого способа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют не ограничительный пример выполнения и на которых:
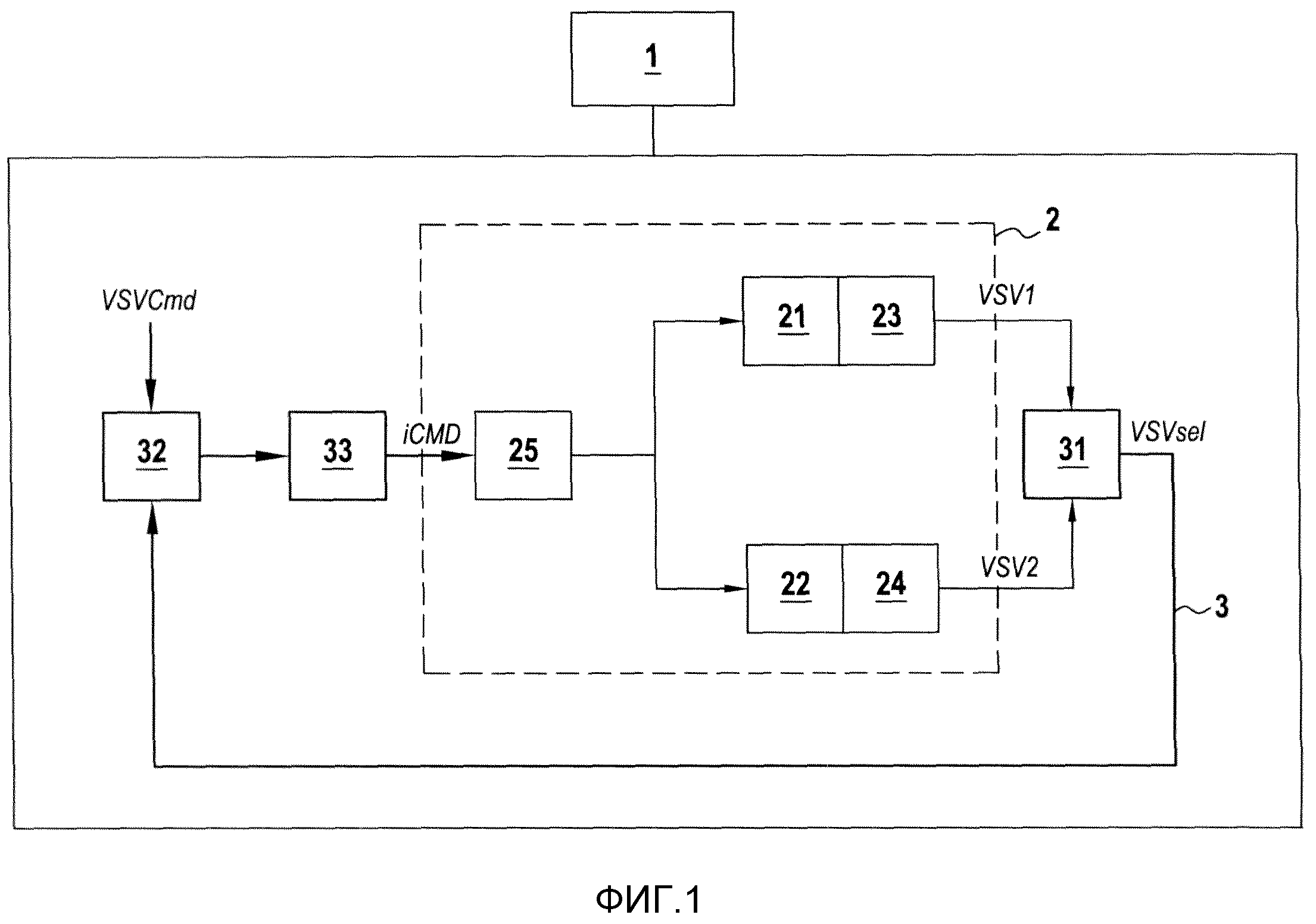
Фиг. 1 - устройство мониторинга контура обратной связи приводной системы переменных геометрий в соответствии с изобретением в частном варианте выполнения изобретения.
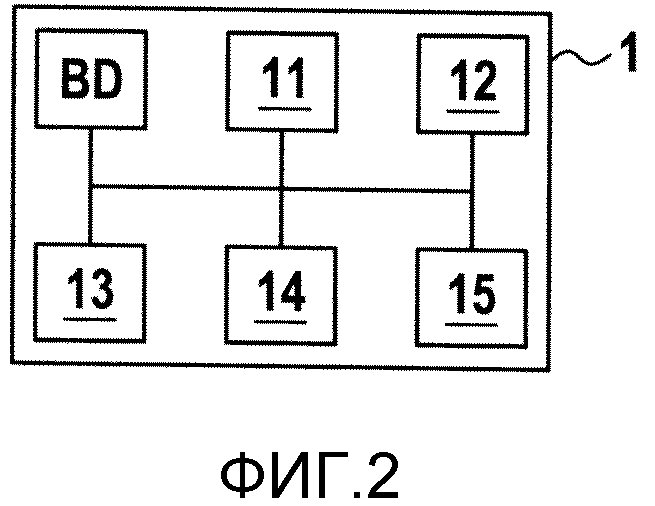
Фиг. 2 - схема материальной архитектуры устройства мониторинга, показанного на фиг. 1, в частном варианте выполнения изобретения.
Фиг. 3 - блок-схема основных этапов способа мониторинга в соответствии с изобретением, когда его осуществляют при помощи устройства мониторинга, показанного на фиг. 1, согласно первому варианту выполнения изобретения.
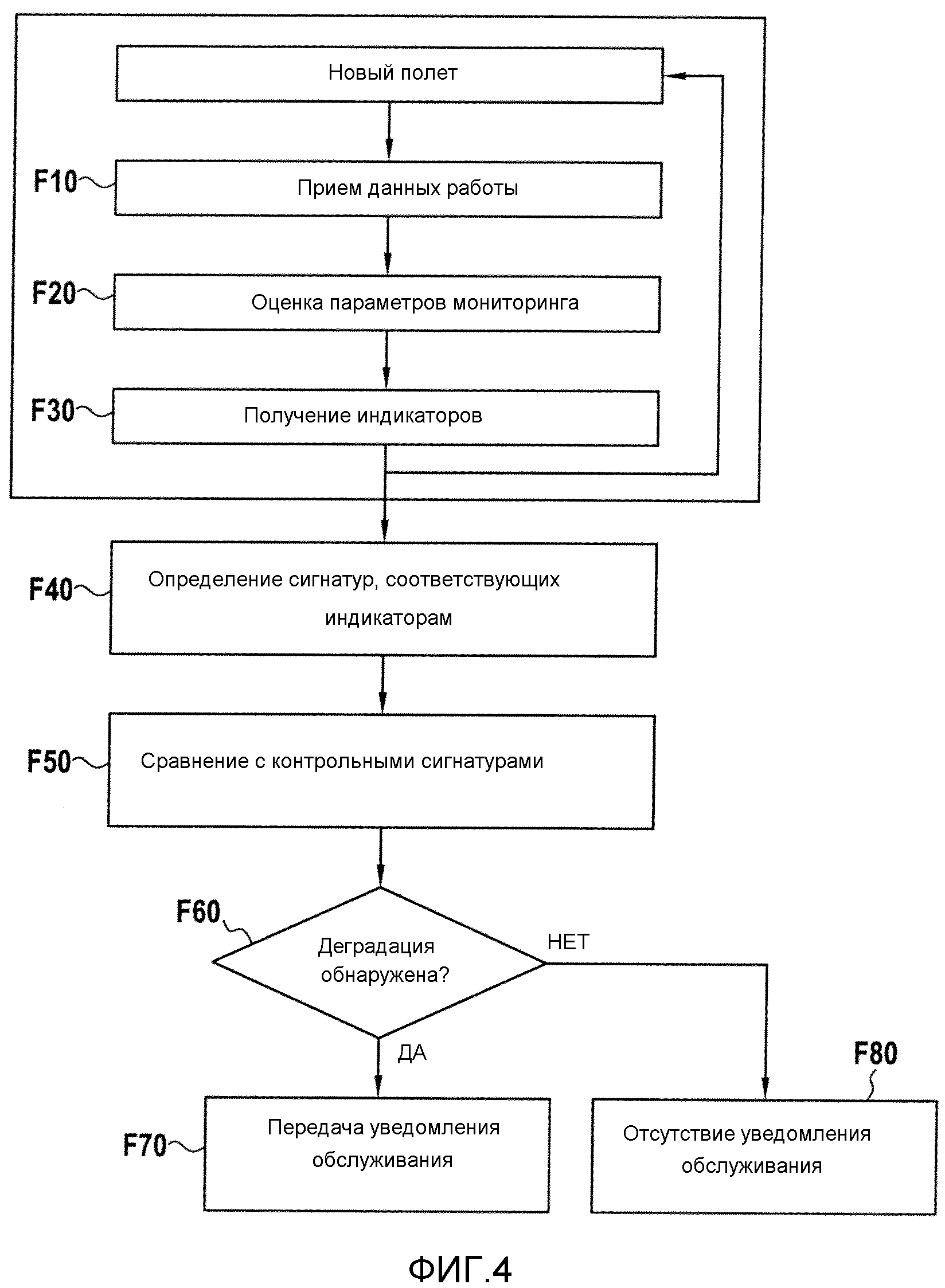
Фиг. 4 - блок-схема основных этапов способа мониторинга в соответствии с изобретением, когда его осуществляют при помощи устройства мониторинга, показанного на фиг. 1, согласно второму варианту выполнения изобретения.
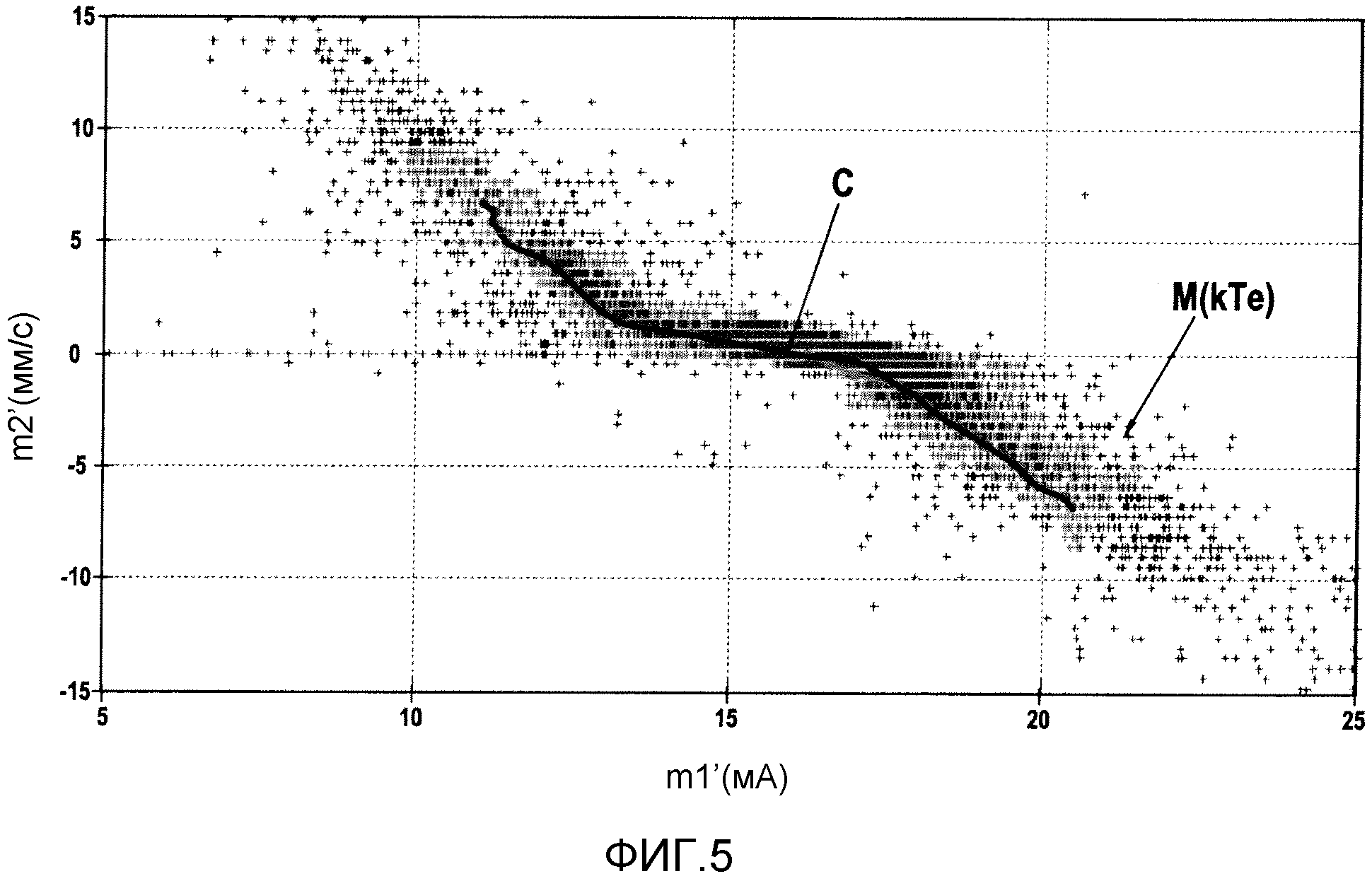
Фиг. 5 - пример кривой С, моделирующей изменения скорости силового цилиндра в зависимости от тока управления сервоклапаном при полете летательного аппарата, во втором варианте выполнения.
Фиг. 6А и 6В - несколько индикаторов, которые можно выделить на кривой С, показанной на фиг. 5, в двух частных вариантах выполнения.
Фиг. 7 иллюстрирует поведение кривой С, показанной на фиг. 5, в присутствии отклонения тока покоя сервоклапана.
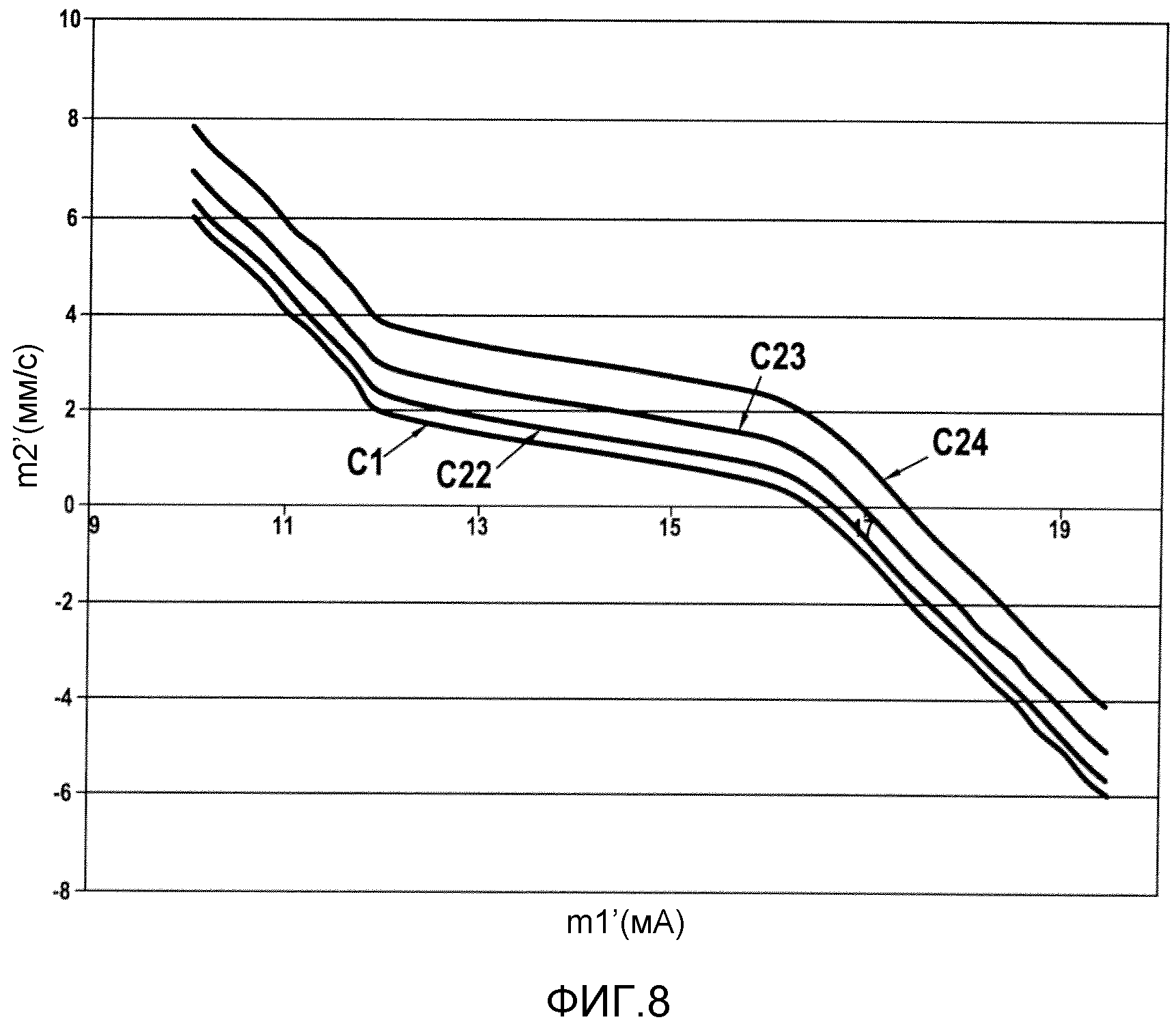
Фиг. 8 иллюстрирует поведение кривой С, показанной на фиг. 5, в присутствии внутренней утечки в силовом цилиндре приводной системы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Как было указано выше, изобретение касается мониторинга контуров обратной связи приводных систем переменных геометрий турбореактивного двигателя, которым оборудован летательный аппарат.
В представленных примерах будет рассмотрен мониторинг контура обратной связи приводной системы, управляющей изменением углов установки лопаток статора турбореактивного двигателя, известных также под названием VSV (Variable Stator Vane).
Вместе с тем, этот случай вовсе не является ограничительным. Изобретение можно применять также к другим приводным системам переменных геометрий, что будет показано ниже.
На фиг. 1 в своем окружении показано устройство 1 мониторинга в соответствии с изобретением в частном варианте выполнения. В данном случае устройство 1 мониторинга выполнено с возможностью отслеживания системы 2 привода VSV турбореактивного двигателя летательного аппарата (не показаны), при этом приводной системой 2 управляет контур 3 обратной связи или контур управления. Такая система привода VSV и такой контур обратной связи сами по себе известны, их описание представлено только в сжатом виде.
В рассматриваемом примере приводная система 2 содержит два резервированных силовых цилиндра 21 и 22, механически соединенных друг с другом.
Каждый силовой цилиндр связан с датчиком положения (соответственно 23 и 24), например, таким как датчик LVDT (Linear Variable Displacement Transducer), установленный в силовом цилиндре. Как известно, такой датчик LVDT содержит:
- первичную обмотку, питаемую переменным током;
- магнитный курсор; и
- две вторичные обмотки, обозначаемые ЕА и ЕВ.
Следует отметить, что положение магнитного курсора влияет на эффективные напряжения на контактах вторичных обмоток, обозначаемых Vi_EA и Vi_EB, i=23, 24 в зависимости от рассматриваемого датчика. Положение пропорционально количеству:
Положением силовых цилиндров 21 и 22 управляет сервоклапан 25, которым, в свою очередь, управляет контур 3 обратной связи. В частности, сервоклапан 25 адаптирует гидравлическую мощность, подаваемую на силовые цилиндры 21 и 22, в зависимости от электрического тока управления iCMD, который поступает на него от контура 3 обратной связи.
Положения силовых цилиндров 21 и 22, измеряемые соответственно при помощи датчиков 23 и 24 и обозначаемые VSV1 и VSV2, поступают в блок 31 выбора контура 2 обратной связи.
Блок 31 выбора выполнен с возможностью оценки общего моментального положения VSVsel, которое он оценивает на основании положений VSV1 и VSV2.
Например, определяют достоверность положений VSV1 и VSV2, и VSVsel равно среднему значению измеренных положений VSV1 и VSV2, если оба они являются достоверными, или одному или другому из измеренных положений VSV1 и VSV2, если только одно из положений является достоверным. В частности, VSVsel=VSV1, если достоверно VSV1, а VSV2 недостоверно, и VSVsel=VSV2, если достоверно VSV2, а VSV1 недостоверно.
Контур 3 обратной связи содержит также, как известно, контрольный блок 32. Этот контрольный блок 32 выполнен с возможностью сравнения общего моментального положения VSVsel, выдаваемого блоком 31 выбора, с так называемым положением управления VSVCmd, характеризующим положение, в котором должны находиться силовые цлиндры в соответствии с правилами регулирования турбореактивного двигателя, применяемыми электронным блоком ECU через контур 3 обратной связи (VSVCmd является положением силового цилиндра, учитываемым для определения команды контура 3 обратной связи в рамках изобретения).
После этого контрольный блок 32 передает в блок 33 регулирования контура 3 обратной связи цифровой сигнал, отображающий отклонение положения между VSVsel и VSVCmd, типа интегральной пропорциональной поправки. Как известно, блок 33 регулирования выполнен с возможностью преобразования принятого цифрового сигнала сравнения в электрический ток управления iCMD и передачи этого тока на сервоклапан 25.
После этого сервоклапан 25 управляет положением силовых цилиндров 21 и 22, преобразуя электрический ток управления в гидравлическую мощность, как было указано выше.
В представленном примере устройство 1 мониторинга встроено в вычислительный блок ECU полностью автономного электронно-цифрового контроллера (FADEC) летательного аппарата, и контур 3 обратной связи, который содержит блоки 31, 32 и 33, реализуют при помощи компьютерной программы, исполняемой устройством 1 мониторинга. Таким образом, блоки 31, 32 и 33, показанные на фиг. 1, являются функциональными элементами, несмотря на то, что они показаны параллельно с конструктивными элементами приводной системы 2.
В варианте выполнения устройство 1 мониторинга установлено на борту летательного аппарата в концентраторе данных, который занимается алгоритмами обслуживания летательного аппарата.
В другом варианте выполнения устройство 1 мониторинга установлено в наземной системе.
В данном случае устройство 1 мониторинга имеет материальную архитектуру компьютера, как показано на фиг. 2.
В частности, оно содержит процессор 11, оперативную память 12, постоянную память 13 и средства 14 связи с оборудованием, установленным на борту летательного аппарата, например, таким как полностью автономный электронно-цифровой контроллер летательного аппарата, или с компонентами приводной системы 2 и контура 3 обратной связи. Как известно, это оборудование и устройство 1 мониторинга в соответствии с изобретением сообщаются друг с другом через линии или шины цифровых данных, которыми оборудован летательный аппарат и которые известны специалисту.
Устройство 1 мониторинга содержит также средства 15 связи с сервером эксплуатанта летательного аппарата (не показан). Эти средства содержат, например, сетевую карту для установления связи через сеть Интернет.
Постоянная память 13 содержит информативную программу в соответствии с изобретением, выполненную с возможностью осуществления основных этапов заявленного способа мониторинга, описание которых следует ниже в связи с двумя частными вариантами выполнения изобретения.
ПЕРВЫЙ ЧАСТНЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ
На фиг. 3 представлены основные этапы способа мониторинга в соответствии с изобретением, когда его осуществляют при помощи устройства, показанного на фиг. 1, согласно первому варианту выполнения изобретения.
Согласно этому первому варианту выполнения, способ мониторинга содержит:
- этап оценки множества параметров мониторинга на основании данных работы контура обратной связи;
- этап получения множества индикаторов на основании параметров мониторинга;
- этап определения, по меньшей мере, одной матрицы сигнатуры, при этом каждая матрица сигнатуры характеризует значения, по меньшей мере, части индикаторов; и
- этап обнаружения и локализации деградации, влияющей на контур обратной связи, в зависимости от упомянутой, по меньшей мере, одной матрицы сигнатуры.
Кроме того, в ходе этапа оценки производят оценку множества параметров, выбираемых, по меньшей мере, из одной из следующих категорий:
- категория параметров, характеризующих положение силовых цилиндров;
- категория параметров, характеризующих коэффициенты авторегрессионных моделей, используемых для прогнозирования положения силовых цилиндров в зависимости от тока управления сервоклапаном; и
- категория параметров, характеризующих ток управления сервоклапаном или интегральный ток контура обратной связи.
Согласно этому первому варианту выполнения, мониторинг контура 3 обратной связи приводной системы 2 лопаток VSV осуществляют через различные группы данных, среди которых данные работы контура обратной связи, параметры мониторинга, индикаторы и сигнатуры (или симптомы). Далее со ссылками на фиг. 3 следует описание этих групп данных и их использования относительно друг друга для мониторинга контура 3 обратной связи.
Под данными работы контура обратной связи следует понимать данные, необходимые для работы приводной системы VSV и, в частности, контура обратной связи и/или характеризующие его работу.
В представленном примере будут рассмотрены следующие данные работы:
- ток управления iCMD активным каналом, подаваемый на сервоклапан 25 блоком 33 регулирования (в дальнейшем обозначаемый d4);
- измеряемое положение VSV1 первого силового цилиндра 21 (в дальнейшем обозначаемое d5);
- измеряемое положение VSV2 второго силового цилиндра 22 (в дальнейшем обозначаемое d6);
- общее моментальное положение VSVsel силовых цилиндров, выдаваемое блоком 31 выбора (в дальнейшем обозначаемое d7);
- отклонение ε между положением управления VSVCmd и общим положением VSVsel (в дальнейшем обозначаемое d8);
- сумма эффективных напряжений (V23_EA и V23_EB) вторичных обмоток датчика LVDT 23 первого силового цилиндра (в дальнейшем обозначаемая d9);
- сумма эффективных напряжений (V24_EA и V24_EB) вторичных обмоток датчика LVDT 24 второго силового цилиндра (в дальнейшем обозначаемая d10);
- обратный ток (или “warp”), реально измеряемый для канала А блока ECU (в дальнейшем обозначаемый d11);
- обратный ток (или “warp”), реально измеряемый для канала В блока ECU (в дальнейшем обозначаемый d12);
- показатель активного канала IVA (в дальнейшем обозначаемый d13);
- интегральный ток контура обратной связи (в дальнейшем обозначаемый d14), вычисляемый блоком 33 регулирования. Следует отметить, что интегральный ток позволяет корректировать погрешности контура 3 обратной связи. Применение такого тока в контуре обратной связи в дополнение к пропорциональному току известно специалисту, и его описание опускается.
Эти данные работы получают на уровне контроллера FADEC, в который интегрировано устройство 1 мониторинга, как было указано выше. Они могут быть получены в результате измерений, производимых при помощи датчиков, которыми оборудован турбореактивный двигатель и которые сами по себе известны, например, в случае данных d5 и d6, или могут быть доступны через электронный модуль регулирования ECU системы регулирования двигателя, как, например, в случае данных d7, d13 или d14.
В описанном примере будут также рассмотрены так называемые экзогенные переменные, которыми являются:
- давление воздуха PS3 камеры сгорания турбореактивного двигателя (в дальнейшем обозначаемое d3);
- дозированный расход топлива WFM, по меньшей мере, в одной форсунке камеры сгорания турбореактивного двигателя (в дальнейшем обозначаемый d2);
- скорость вращения N2 вала высокого давления турбореактивного двигателя (в дальнейшем обозначаемая d1).
Эти переменные не являются параметрами, присущими приводной системе и ее контуру обратной связи, поэтому их квалифицируют как экзогенные, но они влияют на их поведение. Например, скорость вращения насоса, качающего топливо, которое является гидравлической жидкостью для приведения в действие силовых цилиндров, пропорциональна скорости вращения N2 вала высокого давления турбореактивного двигателя. Точно так же, дозированный расход топлива WFM в форсунках камеры сгорания турбореактивного двигателя влияет на расход, необходимый для гидравлической приводной системы. Наконец, давление воздуха PS3 камеры сгорания турбореактивного двигателя влияет на нагрузку, прикладываемую к системе кинематической цепью, приводимой в действие силовыми цилиндрами.
Эти экзогенные переменные известны специалисту, и их обычно измеряют в турбореактивном двигателе при помощи соответствующих датчиков (например, расходомер для WFM). Как и для данных работы, измерения этих экзогенных переменных получают на уровне контроллера FADEC.
FADEC передает вышеупомянутые данные работы, а также измерения экзогенных переменных в устройство 1 мониторинга для оценки параметров мониторинга контура 3 обратной связи (этап Е10).
Следует отметить, что эти данные могут передаваться в устройство мониторинга по мере их сбора или, в варианте, после заранее определенного периода времени (например, при выключении турбореактивного двигателя или периодически во время его работы).
В представленном первом варианте выполнения рассмотрен мониторинг контура 3 обратной связи через множество параметров, выбранных, по меньшей мере, в одной из следующих категорий параметров:
- категория САТ1 параметров, характеризующих положение силовых цилиндров 21 и 22;
- категория САТ2 параметров, характеризующих коэффициенты авторегрессионных моделей, используемых для прогнозирования положения силовых цилиндров в зависимости от тока управления iCMD сервоклапаном 25; и
- категория САТ3 параметров, характеризующих ток управления iCMD сервоклапаном или интегральный ток контура 3 обратной связи.
В частности, в представленном примере оценивают следующие параметры за один или несколько заранее определенных интервалов времени (К), обозначаемых ТР1, ТР2, …, ТРК (этап Е20):
- В КАТЕГОРИИ САТ1:
параметр, обозначаемый m1, характеризующий измеренное моментальное положение VSV1 силового цилиндра 21 (первый силовой цилиндр в рамках изобретения) за рассматриваемый интервал времени TPk (k=1, …, K). Этот параметр получают напрямую на основании данных d5. Иначе говоря, составляющие вектора m1 равны данным d5 за интервал времени TPk;
параметр, обозначаемый m2, характеризующий измеренное моментальное положение VSV2 силового цилиндра 22 (второй силовой цилиндр в рамках изобретения) за рассматриваемый интервал времени TPk (k=1, …, K). Этот параметр получают напрямую на основании данных d6. Иначе говоря, составляющие вектора m2 равны данным d6 за интервал времени TPk;
параметр, обозначаемый m3, характеризующий прогноз, при помощи первой авторегрессионной модели прогноза, обозначаемой ARX1, положения VSVsel за интервал времени TPk. Авторегрессионная модель ARX1 будет подробно рассмотрено ниже;
параметр, обозначаемый m8, характеризующий так называемое контрольное среднее значение суммы эффективных напряжений (VA23_EA и V23_EB) вторичных обмоток силового цилиндра 21 за заранее определенный контрольный интервал времени или интервал времени обучения, обозначаемый ТР0. Параметр m8 получают посредством определения за этот контрольный интервал среднего значения контрольных данных типа d9, получаемых в результате измерения на множестве турбореактивных двигателей одного типа или принадлежащих к тому же парку, что и турбореактивный двигатель, оборудованный приводной системой 2;
параметр, обозначаемый m9, характеризующий среднее значение суммы эффективных напряжений (VA23_EA и V23_EB) вторичных обмоток силового цилиндра 21 за рассматриваемый интервал времени TPk. Параметр m8 получают посредством определения среднего значения данных d9 за этот интервал времени TPk;
параметр, обозначаемый m10, характеризующий так называемое контрольное среднее значение суммы эффективных напряжений (VA24_EA и V24_EB) вторичных обмоток силового цилиндра 22 за контрольный интервал времени или интервал времени обучения ТР0. Параметр m10 получают посредством определения за этот контрольный интервал среднего значения контрольных данных типа d10, получаемых в результате измерения на множестве турбореактивных двигателей одного типа или принадлежащих к тому же парку, что и турбореактивный двигатель, оборудованный приводной системой 2;
параметр, обозначаемый m11, характеризующий среднее значение суммы эффективных напряжений (VA24_EA и V24_EB) вторичных обмоток силового цилиндра 22 за рассматриваемый интервал времени TPk. Параметр m11 получают посредством определения среднего значения данных d10 за этот интервал времени TPk.
- В КАТЕГОРИИ САТ2:
параметр, обозначаемый m4, характеризующий коэффициенты вышеупомянутой первой авторегрессионной модели ARX1, используемой для прогнозирования положения VSVsel (параметр m3). Параметр m4 оценивают в контрольном окне наблюдения W0 размером N на основании контрольных данных типа d7, получаемых в результате измерений на множестве турбореактивных двигателей одного типа или принадлежащих к тому же парку, что и турбореактивный двигатель, оборудованный приводной системой 2;
параметр, обозначаемый m5, характеризующий общее положение силовых цилиндров 21 и 22, предсказанное при помощи второй авторегрессионной модели, обозначаемой ARX2, в зависимости от тока управления iCMD сервоклапаном 25;
параметр, обозначаемый m6, характеризующий положение силового цилиндра 21, предсказанное при помощи третьей авторегрессионной модели, обозначаемой ARX3, в зависимости от тока управления iCMD сервоклапаном 25;
параметр, обозначаемый m7, характеризующий положение силового цилиндра 22, предсказанное при помощи четвертой авторегрессионной модели, обозначаемой ARX4, в зависимости от тока управления iCMD сервоклапаном 25.
Авторегрессионные модели ARX1-ARX4, а также получение коэффициентов этих моделей будут подробно рассмотрены ниже. Следует отметить, что параметры категории САТ2 в данном случае являются векторами, размер которых определяют по числу рассматриваемых коэффициентов в моделях ARX1-ARX4.
- В КАТЕГОРИИ САТ3:
параметр, обозначаемый m12, характеризующий среднее отклонение между током управления iCMD сервоклапаном 25 и обратным током, реально измеряемым для канала А блока ECU, если этот канал является активным. Параметр m12 равен среднему значению данных (d4-d11) за интервал времени TPk;
параметр, обозначаемый m13, характеризующий среднее отклонение между током управления iCMD сервоклапаном 25 и обратным током, реально измеряемым для канала В блока ECU, если этот канал является активным. Параметр m13 равен среднему значению данных (d4-d12) за интервал времени TPk;
параметр, обозначаемый m14, характеризующий средний контрольный ток управления. Параметр m14 оценивают за контрольный интервал ТР0 на основании контрольных данных типа d4, получаемых в результате измерения на множестве турбореактивных двигателей одного типа или принадлежащих к тому же парку, что и турбореактивный двигатель, оборудованный приводной системой 2;
параметр, обозначаемый m15, характеризующий средний ток управления сервоклапаном 25. Параметр m15 равен среднему значению данных d4 за интервал времени TPk;
параметр, обозначаемый m16, характеризующий средний контрольный интегральный ток контура 3 обратной связи. Параметр m16 оценивают за контрольный интервал ТР0 на основании контрольных данных типа d14, получаемых в результате измерения на множестве турбореактивных двигателей одного типа или принадлежащих к тому же парку, что и турбореактивный двигатель, оборудованный приводной системой 2;
параметр, обозначаемый m17, характеризующий средний интегральный ток контура 3 обратной связи. Параметр m17 равен среднему значению данных d14 за интервал времени TPk.
Следует отметить, что вышеупомянутые параметры являются исходными параметрами, используемыми в мониторинге контура 3 обратной связи. Предпочтительно учитывают все эти параметры. Вместе с тем, в варианте, можно рассматривать только подгруппу этих параметров в зависимости от оцениваемого компромисса между эффективностью и сложностью.
Оценку этих параметров мониторинга производят на основании данных работы d4-d14 и экзогенных переменных d1-d3, выбираемых за рассматриваемые интервалы времени TPk (k=1, …, K).
Предпочтительно интервал времени TPk выбирают на установившихся режимах в фазе крейсерского полета или в режиме малого газа на земле. Действительно, авторы изобретения установили, что во время этой фазы установившегося режима симптомы проявляются более четко, что обеспечивает лучшее, а также более надежное обнаружение деградаций, влияющих на контур обратной связи.
Далее следует более подробное описание авторегрессионных моделей, используемых для оценки параметров m4-m7. В данном случае мы рассмотрим известные специалисту линейные модели типа ARX (от Auto Regressive model with eXternal inputs). В варианте можно использовать другие авторегрессионные модели, например, такие как модели ARMAX.
Как известно, модель ARX является авторегрессионной моделью, определяющей выход y(t) в зависимости от одного или нескольких входов и от произвольного остатка моделирования, характеризующегося белым шумом нулевой средней величины η(t), при этом t обозначает рассматриваемый момент выборки.
Предпочтительно в представленном примере входами моделей ARX, ARX1-ARX5 являются переменная d4, характеризующая ток управления iCMD сервоклапаном 25, а также экзогенные переменные d1-d3 (или эквивалентно N2, WFM и PS3).
Таким образом, если говорить конкретнее:
- рассматриваемые модели ARX1 и ARX2 имеют вид:

- модель ARX4 имеет вид:

- модель ARX3 имеет вид:

где элементы aj, bj, cj, ej и fj обозначают коэффициенты моделей ARX (необходимо отметить, что эти коэффициенты не обязательно являются идентичными для разных моделей, однако для упрощения используется только один вид обозначения). Количества jd1, jd2, jd3, jd4, jd5, jd6 и jd7 обозначают число коэффициентов для каждого входа и выхода моделей ARX.
В целом, если y(t) обозначает выход модели ARX (выбранной среди ARX1-ARX4) и θ обозначает вектор размером J коэффициентов модели ARX (например, J=jd1+jd2+jd3+jd4+jd5+jd6 при y(t)=d6(t)), вектор θ можно оценить в соответствии с классическими методами, известными специалисту, во временном окне оценки заранее определенного размера N.
Таким образом, если h(t) обозначает вектор размером J, содержащий наблюдения переменных входа рассматриваемой модели ARX в различные моменты (предшествующие или равные t) или, возможно, наблюдения y в моменты, предшествующие t, то можно записать:
y(t)=h(t)θ+η(t)
y(t-1)=h(t-1)θ+η(t-1)
...
y(t-T+1)=h(t-T+1)θ+η(t-T+1)
что в матричном виде эквивалентно поиску θ, при котором:
Y(t)=H(t)θ+N(t) (Ур. 1)
при этом:
Решение уравнения (Ур. 1) позволяет получить оценку вектора θ. Эта оценка определяет:
- в вышеупомянутом контрольном окне оценки W0 параметр m4, если модель ARX, рассматриваемая в уравнении (Ур. 1), является моделью ARX1; кроме того это оценочное значение позволяет оценить параметр m3, используя уравнение (Ур. 1); и
- в вышеупомянутом окне оценки W:
параметр m5, если модель ARX, рассматриваемая в уравнении (Ур. 1), является моделью ARX2;
параметр m6, если модель ARX, рассматриваемая в уравнении (Ур. 1), является моделью ARX3; и
параметр m7, если модель ARX, рассматриваемая в уравнении (Ур. 1), является моделью ARX4.
Все параметры m1-m17, оцененные таким образом в ходе этапа Е20, используют затем для оценки ряда индикаторов (этап Е30) по каждому рассматриваемому интервалу времени TPk.
В частности, в нашем примере оценивают десять индикаторов на основании параметров m1-m17 за интервалы времени TP1, …, TPk. Эти десять индикаторов включают в себя следующие индикаторы.
Индикатор i_EVS характеризует нормализованное среднее квадратичное отклонение между m5 и d7.
В частности, вычисляют сумму S_EVS отклонений (m5-d7)2 для каждого интервала времени ТР1, …, TPk. Затем вычисляют индикатор i_EVS путем нормализации суммы S_EVS, используя соответствующее ему статистическое распределение контрольного среднего значения m0 и контрольного типового отклонения σ0: i_EVS=(S_EVS-mo)/σ0.
Вышеупомянутое статистическое распределение определяют, например, во время фазы калибровки посредством наблюдения суммы S_EVS за заранее определенный интервал времени обучения. Авторы изобретения установили, что это распределение следует нормальной закономерности, что позволяет осуществить вышеупомянутую нормализацию. Описанные ниже другие индикаторы нормализуют соответствующим образом.
Аналогично, индикатор i_EVA характеризует нормализованное среднее квадратичное отклонение между параметрами m1 и m6, и индикатор i_EVB характеризует нормализованное среднее квадратичное отклонение между параметрами m2 и m7. Индикатор i_CID характеризует параметр m15, нормализованный по параметру m14.
Индикатор i_CINT характеризует параметр m17, нормализованный по параметру m15.
Индикатор i_ЕРА характеризует отклонение предсказания положения силового цилиндра 21. Его получают посредством определения разности между, с одной стороны, измеренным положением, характеризуемым параметром m1, и, с другой стороны, положением m3, предсказанным при помощи модели, коэффициенты которой определены по параметру m4.
Индикатор i_ЕРВ характеризует отклонение предсказания положения силового цилиндра 22. Его получают посредством определения разности между, с одной стороны, измеренным положением, характеризуемым параметром m2, и, с другой стороны, положением m3, предсказанным при помощи модели, коэффициенты которой определены по параметру m4.
Индикатор i_SOMA характеризует параметр m9, нормализованный по параметру m8.
Индикатор i_SOMB характеризует параметр m11, нормализованный по параметру m10.
Индикатор i_EWRAP равен параметру m12 или параметру m13 в зависимости от активного канала (указанного через d13).
Совокупность индикаторов i_EVS, i_EVA, i_EVB, i_CID и i_CINT позволяет обнаруживать деградации механического типа приводной системы 2, например, сдвиг тока управления силового цилиндра 21 или 22, перекрывание диафрагмы охлаждения силового цилиндра 21 или 22, внутренний износ корпуса силового цилиндра 21 или 22, который может привести к увеличению его внутренней утечки.
В частности, значения индикаторов i_EVS, i_EVA, i_EVB, i_CID и i_CINT образуют матрицу, называемую также матрицей сигнатуры, позволяющую обнаруживать или локализовать деградации. Различные методы, известные специалистам, позволяют связать матрицу сигнатуры с конкретной деградацией. Например, можно применить метод, описанный в документе FR 2 939 924, и в этом случае индикаторы i_EVS, i_EVA, i_EVB, i_CID и i_CINT представляют собой индикаторы, стандартизованные в рамках этого документа.
Авторы изобретения установили, что вышеупомянутые индикаторы обеспечивают эффективное и надежное обнаружение деградаций типа механических. Вместе с тем, изобретение может касаться также использования других индикаторов.
Соответственно, совокупность индикаторов i_EPA, i_EPB, i_SOMA, i_SOMB и i_EWRAP позволяет обнаруживать деградации типа электрических приводной системы 2, например, неплотные контакты на схеме управления силовыми цилиндрами 21 и 22 через канал А или канал В и неплотные контакты на схеме измерения силового цилиндра 21 или 22.
В частности, значения индикаторов i_EPA, i_EPB, i_SOMA, i_SOMB и i_EWRAP образуют матрицу, называемую также матрицей сигнатуры, позволяющую обнаруживать или локализовать деградации. Различные методы, известные специалистам, позволяют связать матрицу сигнатуры с конкретной деградацией. Например, можно применить метод, описанный в документе FR 2 939 924, и в этом случае индикаторы i_EPA, i_EPB, i_SOMA, i_SOMB и i_EWRAP представляют собой индикаторы, стандартизованные в рамках этого документа.
Авторы изобретения установили, что вышеупомянутые индикаторы обеспечивают эффективное и надежное обнаружение деградаций типа электрических. Вместе с тем, изобретение может касаться также использования других индикаторов.
Так, на этапе Е50 устройство 1 мониторинга может обнаруживать деградацию, влияющую на контур 3 обратной связи, на основании симптомов (сигнатур).
На этапе Е60 устройство 1 мониторинга проверяет, была ли обнаружена деградация на этапе Е50.
Если деградация была обнаружена, оно выдает уведомление технического обслуживания, идентифицирующее эту деградацию, а также ее локализацию (этап Е70) и предписывающее техническое обслуживание контура обратной связи (например, замену компонента приводной системы в зависимости от обнаруженной деградации).
Это уведомление можно впоследствии передать эксплуатанту летательного аппарата при помощи средств 15 связи устройства 1 мониторинга.
Если же деградация не обнаружена, уведомление обслуживания не выдается (этап Е80), и мониторинг продолжается.
В представленном первом варианте выполнения рассмотрен мониторинг контура обратной связи приводной системы VSV. Как было указано выше, изобретение согласно этому первому варианту выполнения можно также применять для других приводных систем переменных геометрий, например, для приводных систем, управляющих:
- положениями разгрузочных вентилей компрессора турбореактивного двигателя, например, систем привода VBV (Variable Bleed Valve) и TBV (Transient Bleed Valve);
- расходом топлива, как системы привода FMV (Flow Modulation Valve); и
- зазорами в вершинах лопаток турбины высокого давления или низкого давления, например, систем привода НРТАСС (High Pressure Turbine Active Clearance Control) или LPTACC (Low Pressure Turbine Active Clearance Control).
Кроме того, для этих других приводных систем можно предусмотреть другие параметры и/или индикаторы, симптомы и/или сигнатуры.
Например, для контура обратной связи системы дозировки расхода топлива (FMV) в качестве дополнительного индикатора можно рассмотреть отклонение между заданным расходом и измеряемым расходом.
Для контура обратной связи системы привода положений разгрузочных вентилей VBV давления воздуха в качестве дополнительного индикатора можно рассмотреть отклонение между командой и исполненным положением. Этот дополнительный индикатор можно также предусмотреть для контура обратной связи системы привода зазоров в вершинах лопаток турбины высокого давления или низкого давления, например, систем привода НРТАСС (High Pressure Turbine Active Clearance Control) или LPTACC (Low Pressure Turbine Active Clearance Control).
Далее со ссылками на фиг. 4-8 следует описание второго частного варианта выполнения изобретения.
ВТОРОЙ ЧАСТНЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ:
На фиг. 4 представлены основные этапы способа мониторинга в соответствии с изобретением, когда его осуществляют при помощи устройства, показанного на фиг. 1, согласно второму варианту выполнения изобретения.
Согласно этому второму варианту выполнения, способ мониторинга содержит:
- для каждого полета из множества последовательных полетов летательного аппарата:
этап оценки, на основании данных работы контура обратной связи за этот полет, параметра мониторинга, характеризующего ток управления сервоклапаном приводной системы, и, по меньшей мере, одного параметра мониторинга, характеризующего скорость силового цилиндра приводной системы;
этап получения индикаторов посредством анализа изменений упомянутого, по меньшей мере, одного параметра мониторинга, характеризующего скорость силового цилиндра приводной системы, в зависимости от параметра мониторинга, характеризующего ток управления;
- этап определения, на основании индикаторов, полученных за множество последовательных полетов летательного аппарата, - сигнатур, характеризующих изменение этих индикаторов в ходе этих полетов; и
- этап сравнения этих сигнатур с контрольными сигнатурами, соответствующими, по меньшей мере, одной заранее определенной деградации, которая может повлиять на контур обратной связи.
В описанном примере рассмотрен мониторинг контура обратной связи приводной системы, управляющей изменением углов установки лопаток статора турбореактивного двигателя.
Вместе с тем, это предположение ни в коем случае не является ограничительным. Изобретение согласно этому второму варианту выполнения можно также применять для других приводных систем переменных геометрий, например, для приводных систем, управляющих положениями разгрузочных вентилей компрессора турбореактивного двигателя, таких как системы привода VBV (Variable Bleed Valve).
Кроме того, в примере, представленном на фиг. 1, приводная система содержит сервоклапан, управляющий двумя механически соединенными друг с другом силовыми цилиндрами. Вместе с тем, следует отметить, что изобретение согласно этому второму варианту выполнения можно также применять для приводной системы, содержащей только один силовой цилиндр или содержащей два силовых цилиндра, не связанные механически друг с другом.
Согласно этому второму варианту выполнения, мониторинг контура 3 обратной связи системы 2 привода лопаток VSV осуществляют на множестве полетов летательного аппарата через различные группы данных, среди которых данные работы контура обратной связи, параметры мониторинга, индикаторы и сигнатуры. Далее со ссылками на фиг. 4 следует описание этих групп данных и их использования относительно друг друга для мониторинга контура 3 обратной связи.
Под данными работы контура обратной связи следует понимать данные, необходимые для работы системы привода VSV и, в частности, контура обратной связи во время полета летательного аппарата и/или характеризующие его работу во время полета.
В представленном примере будут рассмотрены следующие данные работы:
- ток управления iCMD активным каналом, подаваемый на сервоклапан 25 блоком 33 регулирования; и
- общее моментальное положение VSVsel силовых цилиндров, выдаваемое блоком 31 выбора.
Эти данные работы доступны на заранее определенной частоте дискретизации fe (например, fe=8кГц) для каждого полета на уровне контроллера FADEC, в который встроено устройство 1 мониторинг, как было указано выше. Их можно получать в результате измерений, производимых известными датчиками, которыми оборудован турбореактивный двигатели, или доступных через вычислительный модуль ECU (например, как для общего моментального положения VSVsel).
Вышеупомянутые данные работы в совокупности для каждого полета летательного аппарата поступают в устройство 1 мониторинга для оценки параметров мониторинга контура 3 обратной связи, относящихся к этому полету (эта F10). Следует отметить, что эти данные могут передаваться в устройство мониторинга по мере их сбора или, в варианте, после заранее определенного периода времени (например, при выключении турбореактивного двигателя или периодически во время его работы).
В представленном втором варианте выполнения рассмотрен мониторинг контура 3 обратной связи через два параметра мониторинга (этап F20), а именно:
- параметр мониторинга m1', характеризующий ток управления сервоклапаном 25 приводной системы 2, получаемый напрямую на основании соответствующих данных работы iCMD; и
- параметр мониторинга m2', характеризующий скорость силового цилиндра приводной системы 2, получаемый на основании данных работы VSVsel.
В частности, в представленном здесь примере параметр m2', характеризующий скорость силового цидиндра в момент kTe, где Те обозначает период дискретизации данных работы (то есть Те=1/fe), аппроксимируют при помощи следующего уравнения:
 ,
,
где VSVsel(kTe) обозначает значение VSVsel в момент kTe.
Параметры m1' и m2', оцененные таким образом в ходе этапа F20 по каждому полету летательного аппарата, затем используют для получения ряда индикаторов по этому полету (этап F30).
В представленном втором варианте выполнения нас интересуют три индикатора i1, i2, i3, получаемые посредством анализа кривой С, моделирующей по рассматриваемому полету изменения параметра мониторинга m2' в зависимости от параметра мониторинга m1'. Эту кривую С получают при помощи точек M(kTe), абсциссы m1'(kTe) и ординаты m2'(kTe) которых были определены на этапе F20.
Пример такой кривой представлен на фиг. 5.
В частности, в примере на фиг. 5 по причине слабого разрешения измерения датчиков положений 23 и 24 параметр m2' тоже имеет очень низкое разрешение. Кривую С получают посредством усреднения, по каждому значению параметра m2, абсцисс m1' точек М, ординатой которых является значение m2'.
Кроме того, в примере, показанном на фиг. 5, для С берут только ограниченное число уровней скорости (то есть m2'), а именно 15 положительных значений и 15 отрицательных значений.
Точки MC(I), I=1, …, N (при N=30 на фиг. 5) полученной таким образом кривой С записывают в файл F, сохраняемый в постоянной памяти 13 устройства 1 мониторинга.
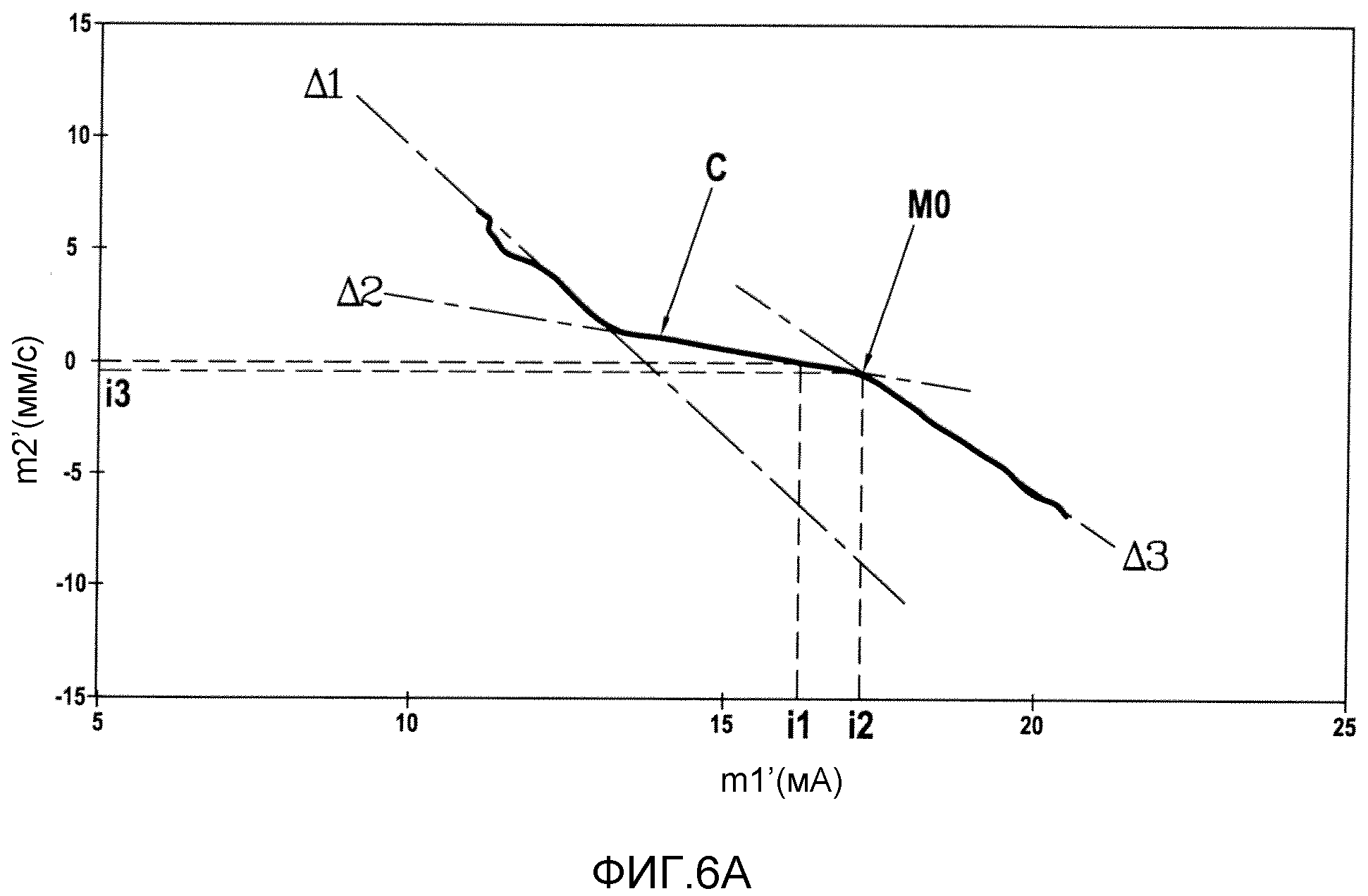
В представленном варианте выполнения индикаторы i1, i2 и i3 соответствуют отдельным характеристикам кривой С, а именно:
- i1 соответствует току покоя или равновесия контура обратной связи, то есть, когда скорость силового цилиндра является нулевой (отсутствие перемещения силовых цилиндров);
- i2 и i3 соответствуют абсциссе и ординате конкретной точки кривой, находящейся за пределами точки равновесия контура обратной связи, для которой скорость силового цилиндра является нулевой (то есть с абсциссой, превышающей абсциссу точки равновесия) и для которой наблюдают изменение крутизны по обе стороны от этой точки.
На фиг. 6А показаны индикаторы i1, i2 и i3, полученные на основании кривой С, показанной на фиг. 5.
В представленном варианте выполнения устройство 1 мониторинга автоматически извлекает эти индикаторы из точек кривой С, сохраненных в файле F.
В частности, для i1 устройство 1 мониторинга ищет в файле F точку MC(I) с нулевой ординатой m2'. Индикатор i1 определяют по абсциссе этой точки. Если в файле F нет ни одной точки с нулевой ординатой, устройство 1 мониторинга определяет i1 посредством интерполяции на основании абсцисс двух последовательных точек MC(I) и MC(I+1) с соответствующими положительной и отрицательной ординатами.
Для i2 и i3 устройство 1 мониторинга на первой стадии оценивает по каждой паре последовательных точек MC(I) и MC(I+1) кривой С относительное отклонение между их абсциссами. Затем оно известным образом вычисляет среднее значение m и типовое отклонение σ оцененных таким образом отклонений. Отклонение между двумя последовательными точками MC(I) и MC(I+1) кривой С, превышающее m+2xσ, показывает устройству 1 мониторинга, что достигнута точка М0 изменения крутизны. Из координат точки M0=MC(I), записанной в файле F, устройство 1 мониторинга выводит индикаторы i2 и i3.
В варианте индикаторы i1, i2 и i3 может извлекать из графического отображения кривой С программа-оператор и направлять в устройство 1 мониторинга, например, через средства ввода/вывода (не показаны) устройства 1 мониторинга или через средства 15 связи.
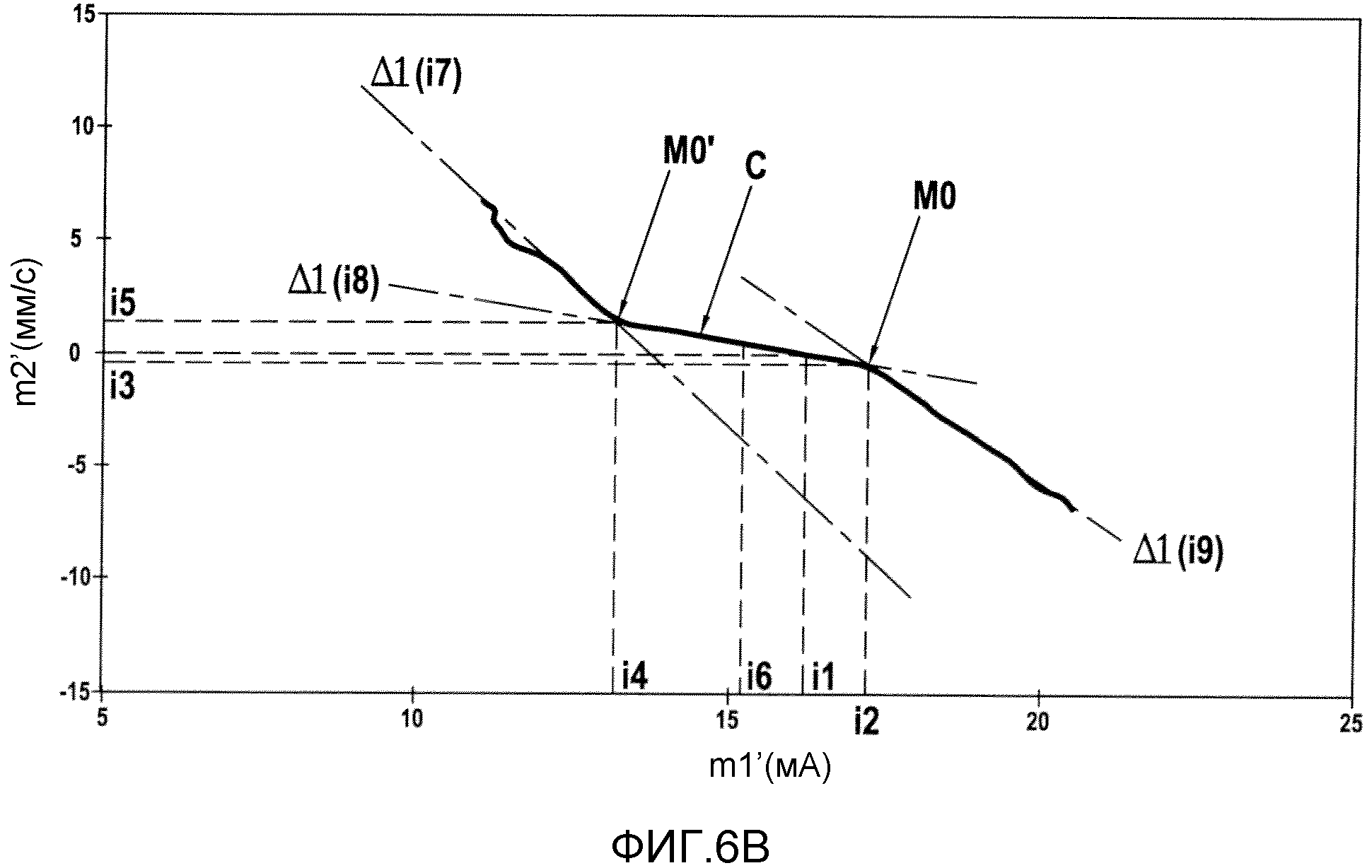
Во втором представленном варианте выполнения для мониторинга контура обратной связи рассматривают только описанные выше индикаторы i1, i2 и i3. Вместе с тем, это предположение не является ограничительным, и из кривой С, кроме индикаторов i1, i2, i3, можно извлекать и другие индикаторы, например:
- индикаторы i4 и i5, соответствующие абсциссе и ординате другой точки M0' кривой С, по которой наблюдает изменение крутизны. Эта точка находится перед точкой равновесия контура обратной связи, при которой скорость силового цилиндра является нулевой (то есть с абсциссой, меньшей абсциссы точки равновесия). Для определения индикаторов i4 и i5 устройство 1 мониторинга ищет отклонение между двумя последовательными точками MC(I) и MC(I+1) кривой С, меньшее m+2xσ. Из координат точки M0=MC(I), записанной в файле F устройство 1 мониторинга выводит индикаторы i4 и i5;
- индикатор i6, соответствующий току покоя привода крутящего момента сервоклапана 25: этот индикатор соответствует абсциссе средней точки сегмента [M0M0'];
- индикатор i7, соответствующий коэффициенту направления прямой Δ1, полученной посредством линейной регрессии точек кривой С, находящихся до точки M0' (то есть имеющих абсциссы, меньшие абсциссы точки M0');
- индикатор i8, соответствующий коэффициенту направления прямой Δ2, полученной посредством линейной регрессии точек кривой С, находящихся между точками M0' и М0 (то есть имеющих абсциссы, заключенные между абсциссами точек M0' и М0); и
- индикатор i9, соответствующий коэффициенту направления прямой Δ3, полученной посредством линейной регрессии точек кривой С, находящихся после точки M0 (то есть имеющих абсциссы, превышающие абсциссы точки M0).
Средства, позволяющие получать индикаторы i7-i9, известны специалисту, и их описание опускается.
Индикаторы i4-i9, извлекаемые из кривой С, показанной на фиг. 5, показаны на фиг. 6В.
После этого все индикаторы i1, i2 и i3, полученные на этапе F30 для различных полетов летательного аппарата, используют для обнаружения деградаций типа механических приводной системы 2.
В частности, в представленном втором варианте выполнения значения индикаторов i1, i2 и i3, полученные во время различных полетов летательного аппарата, на первой стадии объединяют в блоки для формирования сигнатуры, характеризующей работу контура обратной связи (этап F40).
Например, эта сигнатура является вектором, составляющими которого являются значения индикаторов i1, i2 и i3, полученные во время различных полетов летательного аппарата. В случае необходимости, индикаторы i1, i2 и i3 можно нормализовать до определения соответствующей сигнатуры.
В варианте можно определить несколько сигнатур, при этом каждая сигнатура соответствует конкретному индикатору.
Затем эту сигнатуру сравнивают с контрольными сигнатурами, при этом каждая контрольная сигнатура соответствует заранее определенной деградации и в присутствии этой деградации содержит значения индикаторов i1, i2 и i3 (этап F50). Контрольная сигнатура, соответствующая конкретной деградации, отображает значения индикаторов, на основании которых делают вывод о наличии деградации, то есть обычно значения индикаторов, при которых приводная система не является функциональной или при которых срабатывает сигнал неисправности.
Существует несколько известных специалисту методик, позволяющих связать контрольную сигнатуру с отдельной деградацией. Например, контрольные сигнатуры можно определять на основании критериев, разработанных экспериментальным путем и соответствующих ненормальному поведению индикаторов в случае деградации.
Такие типы поведения представлены на фиг. 7 и 8:
- при наличии смещения тока покоя сервоклапана 25 приводной системы 2; и
- при наличии утечки между камерами силового цилиндра 21, 22 приводной системы 2.
В частности, на фиг. 7:
- кривая С1 иллюстрирует изменения скорости силового цилиндра в зависимости от тока управления в отсутствие деградации; и
- кривые С12, С13 и С14 отображают изменения скорости силового цилиндра в зависимости от тока управления при наличии отклонения тока покоя на +1мА (миллиампер), +3мА и +5мА соответственно.
Иначе говоря, увеличение отклонения тока покоя сервоклапана выражается горизонтальным смещением вправо кривой, моделирующей изменения скорости силового цилиндра в зависимости от тока управления.
Аналогично, на фиг. 8:
- кривая С1 иллюстрирует изменения скорости силового цилиндра в зависимости от тока управления в отсутствие деградации; и
- кривые С12, С13 и С14 отображают изменения скорости силового цилиндра в зависимости от тока управления при наличии внутренней утечки силового цилиндра в 1 бар, 4 бар и 7 бар соответственно.
Иначе говоря, увеличение внутренней утечки силового цилиндра выражается вертикальным смещением вверх кривой, моделирующей изменения скорости силового цилиндра в зависимости от тока управления.
Сам этап сравнения сигнатуры или сигнатур, соответствующих индикаторам i1, i2 и i3, можно осуществлять при помощи различных известных специалист методов. Например, можно применять метод, описанный в документе FR 2 939 924, согласно которому вектор аномалии и контрольные векторы соответствуют сигнатуре и контрольным сигнатурам в соответствии с изобретением.
Это сравнение позволяет обнаружить, влияет ли отдельная неисправность, связанная с контрольной сигнатурой, на контур 3 обратной связи.
На этапе F60 устройство 1 мониторинга проверяет, обнаружена ли деградация на этапе F50.
Если деградация обнаружена, оно выдает уведомление технического обслуживания, идентифицирующего эту деградацию, а также ее локализацию (этап F70) и предписывает обслуживание на контуре обратной связи (например, замену компонента приводной системы в зависимости от обнаруженной деградации).
Это уведомление можно впоследствии передать эксплуатанту летательного аппарата при помощи средств 15 связи устройства 1 мониторинга.
Если же деградация не обнаружена, уведомление обслуживания не выдается (этап F80), и мониторинг продолжается.
В представленном варианте выполнения рассмотрен мониторинг контура обратной связи системы привода лопаток VSV. Как было указано выше, изобретение можно также применять для других приводных систем. Кроме того, для этих других приводных систем можно предусмотреть другие параметры и/или индикаторы, симптомы и/или сигнатуры.
Кроме того, в представленном варианте выполнения два силовых цилиндра приводной системы связаны между собой механически: следовательно они приводятся в действие с одной скоростью, поэтому для обнаружения и локализации потенциальной деградации учитывают общее моментальное положение VSVsel.
В другом варианте выполнения, когда два силовых цилиндра 21 и 22 приводной системы 2 не соединены механически, предпочтительно извлекают индикаторы (например, индикаторы i1, i2 и i3), с одной стороны, из кривой, моделирующей изменения скорости силового цилиндра 21 (полученной на основании положений VSV1 силового цилиндра 21, измеренных датчиком 23) в зависимости от тока управления iCMD, и, с другой стороны, из кривой, моделирующей изменения скорости силового цилиндра 21 (полученной на основании положений VSV2 силового цилиндра 22, измеренных датчиком 24) в зависимости от тока управления iCMD. Таким образом, можно обнаружить деградацию, влияющую на силовые цилиндры 21 и 22 и определить, благодаря одной или нескольким соответствующим контрольным сигнатурам, какой из силовых цилиндров подвержен этой деградации.
Кроме того, мониторинг положения VSV1 и VSV2 предпочтительно позволяет обнаружить деградацию, влияющую на датчики положения 23 и 24; действительно, при нормальной работе эти два датчика должны выдавать сходные измерения.
Механическая деталь, содержащая вставку из композитного материала
Способ формирования рельефных элементов, представляющих собой завихрители пограничного слоя
Способ восстановления формы подвижной лопатки газотурбинного двигателя, лопатка газотурбинного двигателя и газотурбинный двигатель, содержащий такую лопатку
Устройство для аксиального удержания лопаток, установленных на роторном диске газотурбинного двигателя
Модуль турбомашины, снабженный устройством для улучшения радиальных зазоров
Контроль зазора у вершины лопаток в турбине высокого давления турбомашины
Устройство производства электрической энергии в двухвальном газотурбинном двигателе
Выхлопной кожух газотурбинного двигателя, газотурбинный двигатель, дренаж выхлопного кожуха газотурбинного двигателя
Устройство подвески газотурбинного двигателя и газотурбинный двигатель, содержащий такое устройство подвески
Структурная или неструктурная соединительная стойка картера компрессора турбореактивного двигателя, промежуточный картер турбореактивного двигателя и турбореактивный двигатель
Механическая деталь, содержащая вставку из композитного материала
Способ формирования рельефных элементов, представляющих собой завихрители пограничного слоя
Способ восстановления формы подвижной лопатки газотурбинного двигателя, лопатка газотурбинного двигателя и газотурбинный двигатель, содержащий такую лопатку
Устройство для аксиального удержания лопаток, установленных на роторном диске газотурбинного двигателя
Модуль турбомашины, снабженный устройством для улучшения радиальных зазоров
Контроль зазора у вершины лопаток в турбине высокого давления турбомашины
Устройство производства электрической энергии в двухвальном газотурбинном двигателе
Выхлопной кожух газотурбинного двигателя, газотурбинный двигатель, дренаж выхлопного кожуха газотурбинного двигателя
Устройство подвески газотурбинного двигателя и газотурбинный двигатель, содержащий такое устройство подвески
Структурная или неструктурная соединительная стойка картера компрессора турбореактивного двигателя, промежуточный картер турбореактивного двигателя и турбореактивный двигатель

