Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к контрольно-измерительной технике и может использоваться для контроля движения на дорогах, для контроля нарушения скоростного режима транспортными средствами (ТС).
Существует множество устройств и способов определения скорости транспортных средств: радары, лазеры, видеокамеры и пр. Предлагаемый способ основан на анализе последовательности видеокадров полученных от видеокамеры (ВК), установленной на пути движения ТС, и измерении параметров пластины с государственным регистрационным знаком (ГРЗ).
Известен способ определения скорости транспортного средства (патент РФ №2442218 с приоритетом от 03.12.2010 г., МПК G08G 1/052), заключающийся в том, что на пути движения ТС размещают видеокамеру, с помощью которой формируют последовательность видеокадров с изображением пластины ГРЗ ТС при перемещении его в зоне контроля видеокамеры и определяют значение скорости ТС за время пересечения им зоны контроля видеокамеры, согласно изобретению фиксируют, по крайней мере, два видеокадра с различимым изображением ГРЗ, для каждого зафиксированного видеокадра осуществляют распознавание ГРЗ, определяют и запоминают время фиксации видеокадра, определяют ширину и высоту изображения пластины ГРЗ на видеокадре, вычисляют отношение ширины и высоты изображения пластины ГРЗ, сравнивают это значение с эталонным для данного типа распознанной пластины ГРЗ, по результатам сравнений вычисляют коэффициент сужения пластины ГРЗ, с учетом которого корректируют измеренную ширину изображения пластины ГРЗ, затем, с учетом фокусного расстояния объектива видеокамеры, параметров матрицы видеокамеры и скорректированной ширины изображения пластины ГРЗ, определяют расстояния Ln, где n=1, 2, 3, - номер зафиксированного видеокадра, от видеокамеры до пластины ГРЗ для каждого зафиксированного видеокадра и определяют значение скорости для каждой из возможных пар зафиксированных видеокадров как отношение разности вычисленных расстояний ΔLn к разности времени фиксации ΔΤп соответствующих видеокадров, при этом в качестве искомого значения скорости выбирают значение, соответствующее максимальной скорости на данном участке зоны контроля видеокамеры.
Недостаток этого способа заключается в низкой точности измерения положения автомобиля в видеокадре и, следовательно, скорости.
Наиболее близким техническим решением является способ определения скорости транспортных средств (патент РФ №2419884 с приоритетом 20.07.2010 г., МПК G08G 1/052), заключающийся в том, что на пути движения ТС размещают видеокамеру и фиксируют видеокадры с изображением пластины ГРЗ ТС при перемещении его в зоне контроля видеокамеры, отличающийся тем, что предварительно измеряют параметры расположения видеокамеры относительно плоскости дороги, запоминают видеокадры, полученные в начале и в конце зоны контроля видеокамеры, определяют временной интервал между первым и последним видеокадрами, измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадров в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, определяют направление перемещения пластины ГРЗ в системе координат дороги по координатам точек центра пластины ГРЗ в начале и в конце зоны контроля, корректируют размеры видимого изображения пластины ГРЗ на видеокадрах с учетом направления перемещения пластины ГРЗ, сравнивают скорректированные размеры пластины ГРЗ со стандартными значениями размеров пластины ГРЗ и по результатам сравнения определяют высоту, на которой перемещается точка центра пластины ГРЗ относительно плоскости дороги, преобразуют координаты точек углов и центра пластины ГРЗ из системы координат видеокадра в систему координат дороги в плоскости, параллельной плоскости дороги и расположенной на высоте перемещения точки центра пластины ГРЗ, определяют величину перемещения точки центра пластины ГРЗ в указанной плоскости, по найденной величине перемещения точки центра пластины ГРЗ и времени, за которое было совершено это перемещение, соответствующее временному интервалу между первым и последним видеокадрами, определяют скорость ТС.
Недостаток этого способа заключается в сложности калибровки, т.е. привязке ВК к дорожному полотну, а именно: измерения большого количества параметров, таких как высота подвеса ВК, расстояния ее до зоны контроля и углы ее установки, наклоны плоскости дорожного полотна в пределах зоны контроля. Проведение данных работ требует не только использования геодезического и электронного измерительного оборудования, но и дополнительных организационных мероприятий, связанных с временным перекрытием движения ТС через зону контроля. Погрешности и ошибки в измерениях многочисленных параметров, таких как, высота подвеса ВК, расстояния ее до зоны контроля и углы ее установки, наклоны плоскости дорожного полотна в пределах зоны контроля, неизбежно приведут к погрешностям в измерении скорости.
Технический результат предлагаемого изобретения «Способ определения скорости транспортного средства» может быть представлен следующим перечнем:
Упрощение способа измерения скорости ТС,
Сокращается количество параметров при определении конечного результата,
Повышение точности определения скорости ТС,
Простота и доступность проведения калибровки,
Проведение калибровки без перекрытия дорожного движения.
Технической задачей, на решение которой направлено предлагаемое изобретение, являются упрощение способа измерения и повышение точности определения скорости ТС с помощью ВК. Для этого калибровка зоны контроля в предлагаемом способе обеспечивается проездом контрольной зоны тестовым ТС с известной постоянной скоростью. Не требуется применения сложной геодезической и другой измерительной аппаратуры для измерения множества параметров, осуществляющих привязку ВК к дорожному полотну, нет необходимости перекрывать дорожное движение в зоне измерений для проведения калибровки, так как проезд зоны контроля тестовым ТС с любой известной постоянной скоростью можно обеспечить и в общем потоке ТС. Процесс калибровки зоны контроля в предлагаемом способе существенно проще, а ошибка и погрешность существенно уменьшаются, т.к. в определении скорости используются только скорость тестового ТС, по два параметра пластины ГРЗ (ширина и центр) тестового и неизвестного ТС и время фиксации видеокадров. В отличие от предлагаемого способа в аналоге требуется измерение большого количества параметров (высоты подвеса ВК, расстояния ее до зоны контроля и углы ее установки, наклоны плоскости дорожного полотна в пределах зоны контроля и пр.).
Технический результат достигается тем, что в предлагаемом способе определения скорости ТС собраны существенные признаки, являющиеся необходимыми и достаточными и позволяющие определить скорость ТС с высокой точностью и упростить способ определения скорости ТС.
Все существенные признаки можно условно разделить на две части. Первая часть - это признаки, позволяющие определить путь, пройденный тестовым ТС по дорожному полотну, и получить калибровочную зависимость пройденного пути в системе координат дорожного полотна от координаты центра пластины ГРЗ в системе координат видеокадра тестового ТС. По двум любым выбранным видеокадрам с пластиной ГРЗ неизвестного ТС с зафиксированным временным интервалом между ними из калибровочной зависимости по координатам центров пластины ГРЗ тестового ТС, совпадающим с вычисленными координатами центров пластин ГРЗ неизвестного ТС, находят расстояние, пройденное неизвестным ТС по дорожному полотну между выбранными видеокадрами. Эти действия позволяют получить первую часть формулы, определяющую предварительную скорость неизвестного ТС по пройденному пути между двумя видеокадрами и известному временному интервалу между ними, без учета высоты подвеса номера над дорожным полотном и других параметров, влияющих на точность определения скорости.
Вторая часть признаков позволяет получить калибровочную зависимость ширины пластины от координаты центра пластины ГРЗ в системе координат видеокадра тестового ТС. Как минимум по одному выбранному видеокадру с пластиной ГРЗ неизвестного ТС с вычисленной шириной и центром из калибровочной зависимости по координатам центров пластины ГРЗ тестового ТС, совпадающим с вычисленными координатами центров пластин ГРЗ неизвестного ТС, находят ширину пластины ГРЗ тестового ТС. Отношение ширин пластин ГРЗ тестового и неизвестного ТС является поправочным коэффициентом. При определении поправочного коэффициента с целью повышения точности измерения возможно использование двух, нескольких или даже всех видеокадров с зафиксированной пластиной ГРЗ неизвестного ТС с вычисленными координатами и ширинами пластины ГРЗ. Из всех найденных поправочных коэффициентов для каждого видеокадра в этом случае берется и используется среднее арифметическое значение. Поправочный коэффициент является второй частью формулы и учитывает параметры, непосредственно влияющие на точность определения скорости.
Формула, состоящая из двух частей, определяет конечный результат посредством произведения предварительной скорости на поправочный коэффициент - скорость неизвестного ТС.
Признаки калибровки зоны контроля проездом тестового ТС с известной постоянной скоростью являются основными признаками, обеспечивающими получение конечного результата, а признаки фиксации всех видеокадров, времени их появления и вычисление центра и ширины пластины ГРЗ, построение калибровочных кривых являются общими для получения основного технического результата определения скорости.
Только построенные калибровочные зависимости, связывающие систему координат дорожного полотна и видеокадра, позволяют найти пройденный отрезок пути неизвестным ТС между двумя зафиксированными видеокадрами по координатам центра пластины ГРЗ. А калибровочная зависимость ширины пластины ГРЗ от координаты центра пластины ГРЗ тестового ТС в системе координат видеокадра позволяет найти ширину пластины ГРЗ тестового ТС для той же координаты центра пластины ГРЗ, что и найденной в зафиксированном видеокадре при проезде неизвестного ТС. Сравнение ширин пластины ГРЗ тестового и неизвестного ТС при одинаковых координатах центра пластины ГРЗ и найденный отрезок пути, пройденный неизвестным ТС между двумя зафиксированными видеокадрами, позволит вычислить скорость неизвестного ТС с высокой точностью.
Признаки и их взаимосвязь описаны ниже.
Признак 1. Калибровка осуществляется посредством проезда тестового ТС с известной постоянной скоростью через зону контроля ВК.
Калибровка является признаком, обеспечивающим получение конечного результата, а совместно с признаками 2 и 3 эта группа признаков относится к калибровке всего технологического процесса.
Этот признак совместно с признаком 2 (время появления видеокадров) позволяет определить путь, пройденный тестовым ТС по дорожному полотну (признак 4), в дальнейшем, используя признаки 2, 3, 4, получить калибровочные зависимости (признаки 5 и 6), обеспечивающие возможность осуществления и выполнение действий согласно предлагаемому изобретению, и участвуют в определении конечного результата. Калибровка является признаком, обеспечивающим получение конечного результата.
Признак 2. Фиксируется время появления всех видеокадров тестового и неизвестного ТС.
Признак 3. Определяются координаты центра и ширина пластины ГРЗ тестового и неизвестного ТС.
Признак 4. Определяется путь, пройденный тестовым ТС по дорожному полотну. Пройденный путь определяется, используя признаки 1, 2, 3 предлагаемого изобретения. На основании этого признака строится калибровочная зависимость (признак 5). Это позволяет, используя признаки 7, определить предварительную скорость, признак 8, и участвовать в определении реальной скорости, признак 12. Признаки 2, 3, 4 предлагаемого изобретения являются необходимыми для построения калибровочных зависимостей (признаки 5 и 6), а также для получения окончательного результата.
Признак 5. Строится калибровочная зависимость пройденного пути тестового ТС в системе координат дорожного полотна от координаты центра пластины ГРЗ в системе координат видеокадра.
Калибровочная зависимость построена при использовании признаков 1-4 предлагаемого изобретения.
Признак 6. Строится калибровочная зависимость ширины пластины ГРЗ от координаты центра пластины ГРЗ в системе координат видеокадра тестового ТС. Калибровочная зависимость построена при использовании признаков 1-3 предлагаемого изобретения.
Признак 7. Выбираются два любых видеокадра, зафиксированных при проезде неизвестного ТС с известными координатами центров пластин, и определяется временной интервал между ними. Использованы признаки 2 и 3 предлагаемого изобретения.
Признак 8. Используя калибровочную зависимость пройденного пути от координаты центра пластины ГРЗ тестового ТС, находятся координаты центров пластин ГРЗ тестового ТС, совпадающие с координатами центров пластин ГРЗ неизвестного ТС в двух выбранных видеокадрах. Определяется расстояние, пройденное неизвестным ТС по дорожному полотну между этими видеокадрами.
По пройденному пути и временному интервалу между двумя видеокадрами вычисляется предварительная скорость неизвестного ТС.
Использованы признаки 1, 2, 3, 4, 5, 7 предлагаемого изобретения.
Признак 9. Выбирается как минимум один видеокадр неизвестного ТС.
Использованы признаки 2 и 3 предлагаемого изобретения.
Признак 10. Используя калибровочную зависимость ширины пластины ГРЗ от координаты центра пластины ГРЗ тестового ТС, находится ширина пластин ГРЗ тестового ТС с координатой центра пластины, совпадающей с координатой центра пластины ГРЗ неизвестного ТС в выбранном видеокадре.
Использованы признаки 1, 2, 3, 6, 9 предлагаемого изобретения.
Признак 11. Составляется отношение ширин пластин ГРЗ тестового и неизвестного ТС, которое является поправочным коэффициентом при определении скорости.
Использованы признаки 1, 2, 3, 6, 9, 10 предлагаемого изобретения.
Признак 12. Реальная скорость неизвестного ТС определяется как произведение предварительной скорости и поправочного коэффициента.
Использованы все признаки предлагаемого изобретения.
Приведенная выше взаимосвязь существенных признаков позволяет утверждать, что технический результат упрощения способа и повышения точности определения скорости достигается последовательным выполнением существенных признаков при условии, что каждый признак необходим и окончательный результат не возможен без выполнения этой последовательности, начиная с первого признака калибровки зоны контроля ВК посредством проезда тестового ТС с известной постоянной скоростью. Благодаря этому признаку стало возможным создать технологию, отвечающую всем требованиям, предъявляемым к устройствам контроля скоростного режима на дорогах при помощи ВК.
Сущность изобретения иллюстрируется Фиг. 1-6.
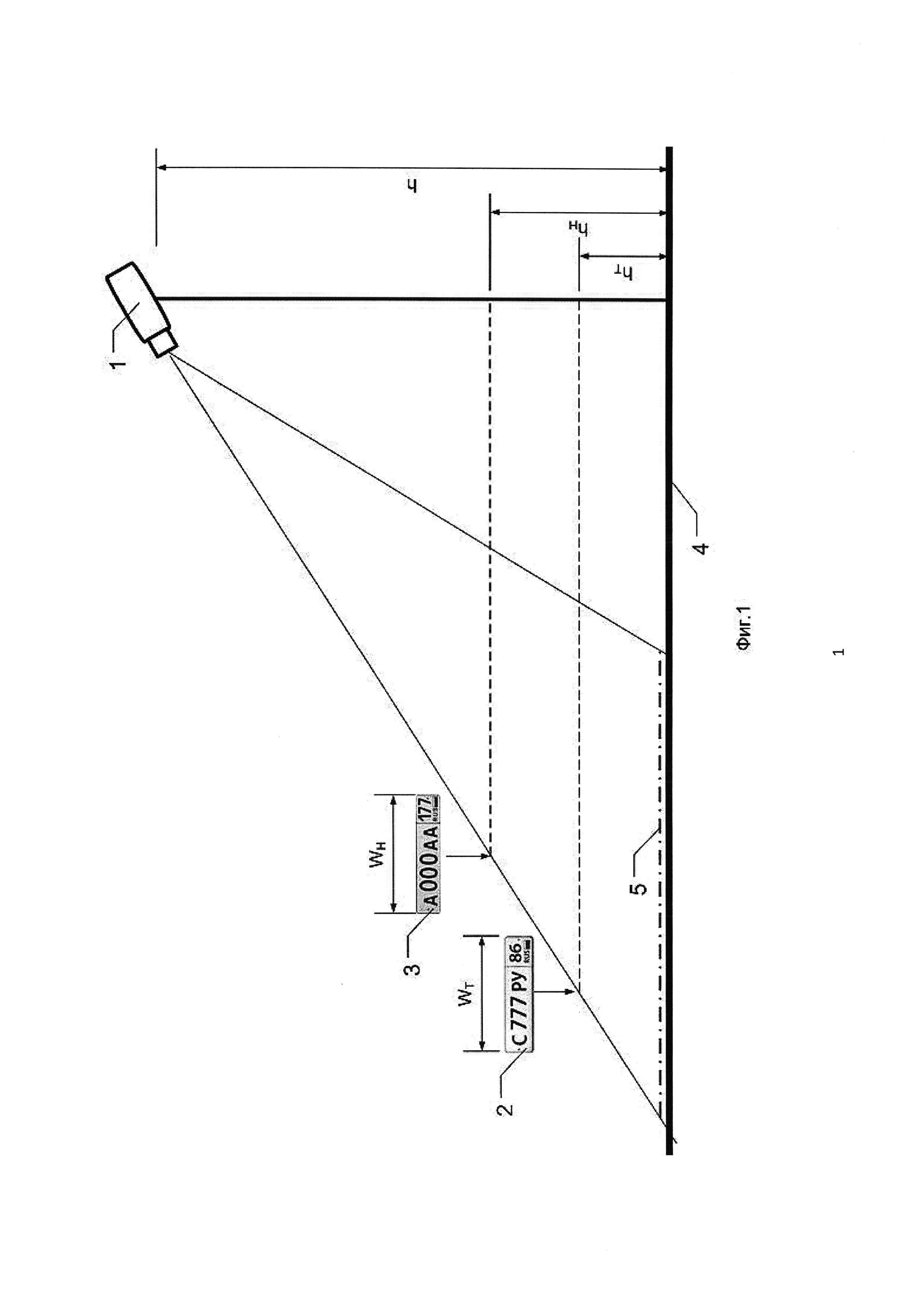
Фиг. 1
Схематический чертеж расположения видеокамеры и проезжающих ТС по дорожному полотну через зону контроля ВК.
1 - видеокамера, h - высота установки видеокамеры над дорожным полотном,
2 - ГРЗ тестового ТС, hT - высота подвеса пластины ГРЗ и WT - ширина пластины ГРЗ в пикселях тестового ТС, проезжающего через зону контроля с известной скоростью VT,
3 - ГРЗ неизвестного ТС, hH - высота подвеса пластины ГРЗ и WH - ширина пластины ГРЗ в пикселях для неизвестного ТС, проезжающего через зону контроля с неизвестной скоростью VH,
4 - дорожное полотно,
5 - зона контроля ВК, являющаяся частью дорожного полотна.
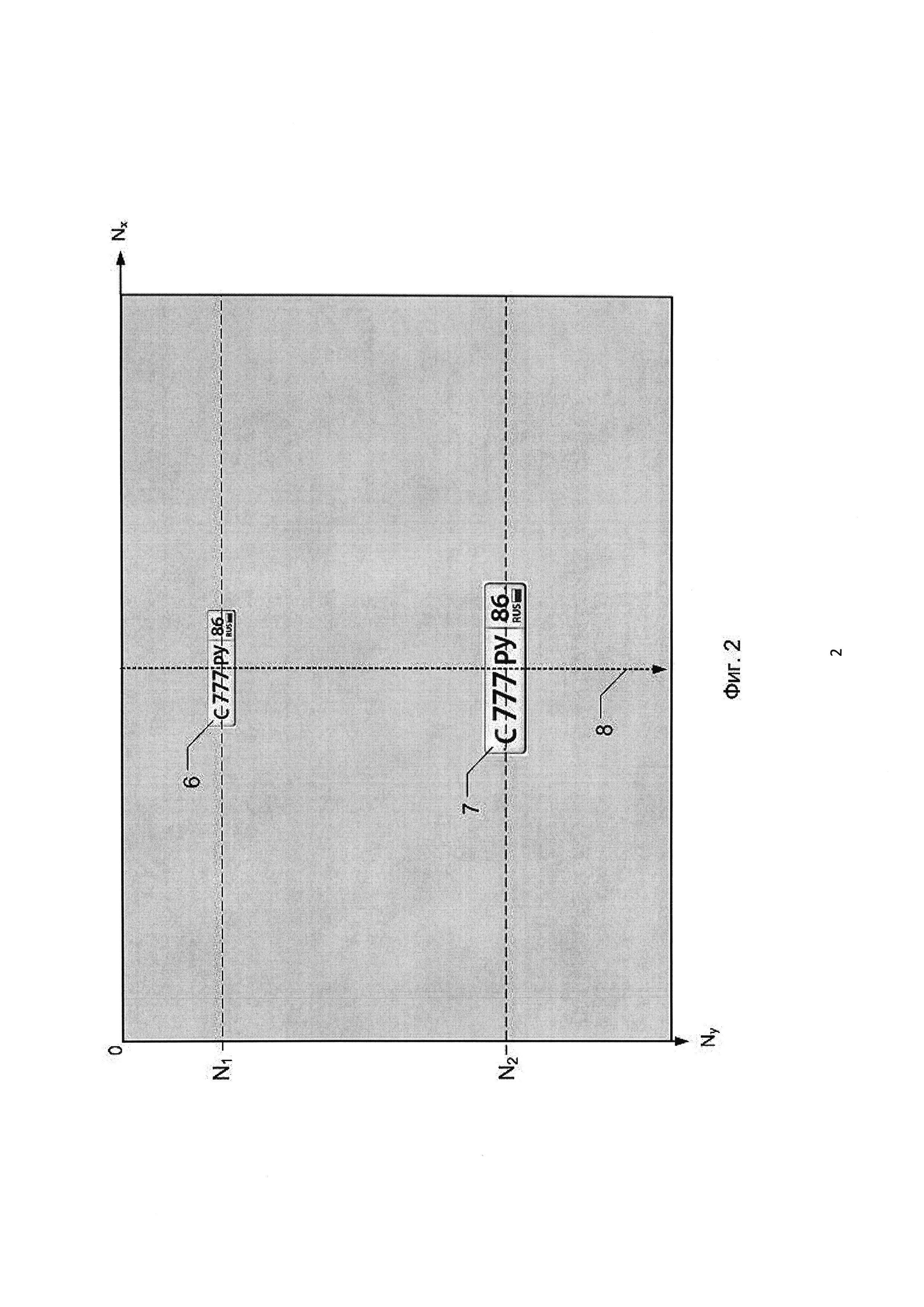
Фиг. 2
Положение пластин ГРЗ с координатами центров N1 и N2 в системе координат видеокадра в пикселях для двух видеокадров, полученных при проезде ТС в направлении оси ΝY через зону контроля ВК.
6 - пластина ГРЗ ТС, зафиксированная в первом видеокадре с координатой N1 (в пикселях) центра пластины ГРЗ,
7 - пластина ГРЗ ТС, зафиксированная во втором видеокадре с координатой N2 (в пикселях) центра пластины ГРЗ,
8 - Направление движения ТС.
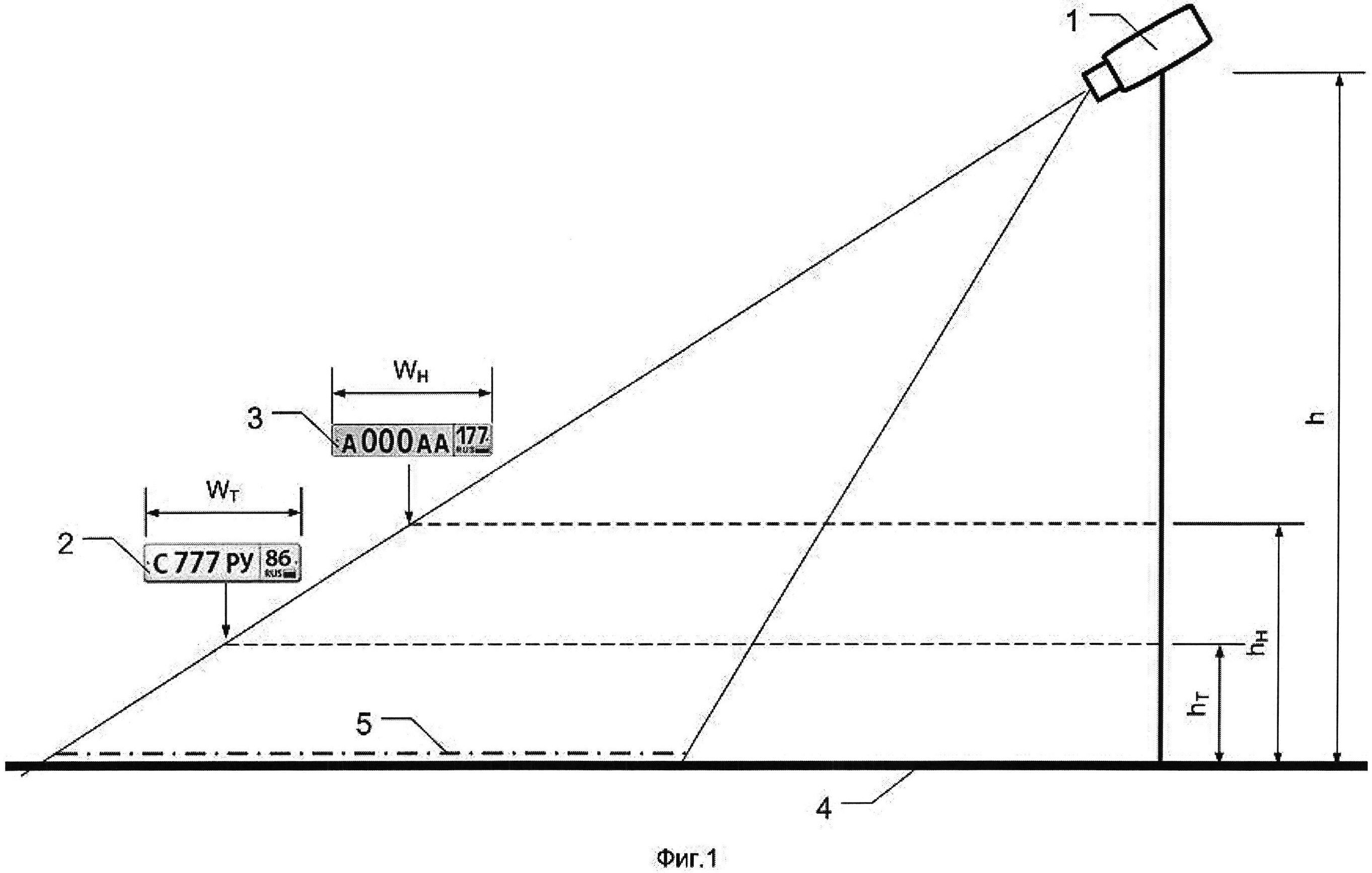
Фиг. 3
Калибровочная зависимость пути L, пройденного по дорожному полотну тестовым ТС от координаты N в пикселях центра пластины ГРЗ.
Точки на чертеже - координаты центра пластины ГРЗ тестового ТС в зафиксированных видеокадрах и определенный согласно изобретению пройденный путь тестовым ТС по дорожному полотну между видеокадрами. На графике условно показано определение пути, пройденного по дорожному полотну неизвестным ТС по двум произвольно выбранным видеокадрам, зафиксировавшим его. Путь определяется посредством сравнения координат центров пластин ГРЗ тестового и неизвестного ТС.
Для примера показано: ΔL - расстояние, пройденное неизвестным ТС без учета изменения высоты подвеса пластины ГРЗ между первым видеокадром с координатой центра пластины N1 и вторым видеокадром с координатой N2 центра пластины ГРЗ неизвестного ТС, совпадающими с координатами центров пластин ГРЗ тестового ТС.
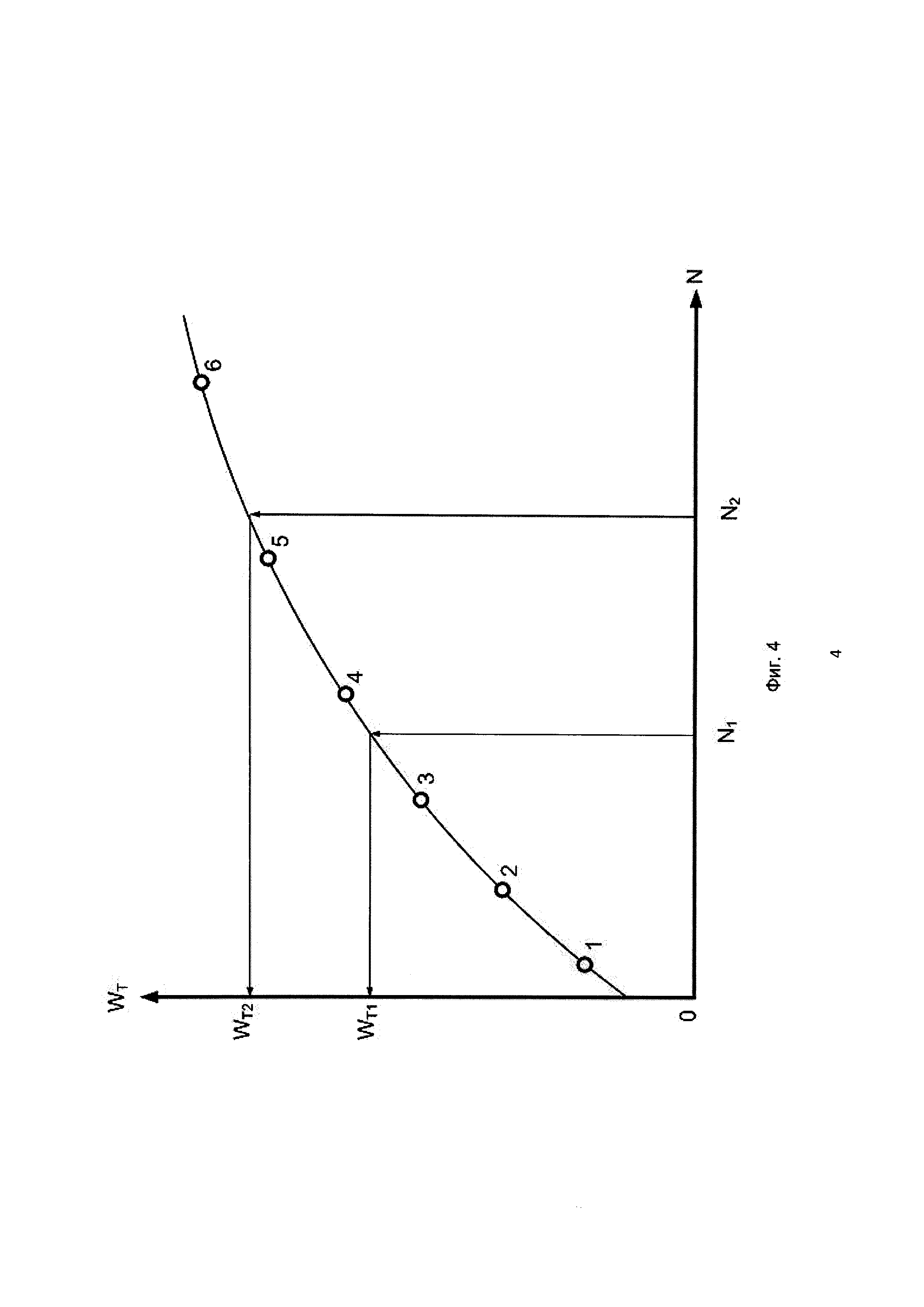
Фиг. 4
Калибровочная зависимость ширины пластины ГРЗ в пикселях - W от координаты центра пластины ГРЗ в пикселях тестового ТС.
Точки на чертеже - координаты центра пластины в зафиксированных видеокадрах и соответствующие им ширины пластины ГРЗ при проезде тестового ТС зоны контроля ВК.
Для примера показано: N1, N2 - координаты середины пластины ГРЗ неизвестного ТС в первом и втором видеокадрах, совпадающих с координатами пластин ГРЗ тестового ТС. WT1 и WT2 - соответствующие ширины пластин тестового ТС, найденные из калибровочной зависимости для координат N1 и N2 середины пластины ГРЗ. Ширины пластин ГРЗ WH1 и WH2 неизвестного ТС определяются при фиксации видеокадров.
Фиг. 5
Зафиксированный легковой автомобиль с определенным ГРЗ.
В информационной строке для зафиксированного ТС указаны: 51 км/час - вычисленная скорость, 06.10.2015 - дата и 7:24:04 - время, 196 рх - ширина пластины ГРЗ в пикселях.
Фиг. 6
Результаты измерения скорости при проезде потока транспортных средств.
Показан пример работы программы измерения скорости при проезде потока транспортных средств.
Способ определения скорости ТС осуществляется следующим образом.
Видеокамера (ВК) 1 размещается на пути движения транспортных средств (ТС) 2, 3 над дорожным полотном 4 (Фиг. 1), осуществляется распознавание всех государственных регистрационных знаков (ГРЗ) ТС, попавших в зону контроля ВК 5, и определяются координаты центра пластины и ширина ГРЗ в системе координат видеокадра. На Фиг. 2 в качестве упрощенного примера показаны два видеокадра, в которых зафиксирована пластина ГРЗ с координатами центра пластины N1 6 и N2 7 ТС, движущегося вдоль координаты ΝY 8. В качестве координаты центра пластины ГРЗ можно использовать только координату ΝY (т.е. номер строки видеокадра), совпадающую с осью дороги, т.к. она одна при таких условиях отражает пройденный путь. Предварительно производится калибровка посредством проезда через зону контроля ВК тестового ТС 2 с известной и постоянной скоростью VT. Для полученных видеокадров в процессе проезда через зону контроля ВК тестового 2 и любого неизвестного 3 ТС фиксируется время их появления, определяются координаты центра пластины ГРЗ и ее ширина W для каждого видеокадра в пикселях. Исходя из известной скорости VT и времени прохождения тестового ТС TT через зону контроля ВК между любыми видеокадрами с известными координатами ΝY определяется пройденный путь L в системе координат дорожного полотна как L=VT×TT. По этим данным строятся калибровочные зависимости пройденного пути L в системе координат дорожного полотна от координаты N центра пластины ГРЗ в системе координат видеокадра в пикселях (Фиг. 3), а также ширины W пластины ГРЗ тестового ТС от координаты N центра пластины ГРЗ в системе координат видеокадра (Фиг. 4). Например, на калибровочных графиках Фиг. 3 и Фиг. 4 показаны шесть калибровочных точек, полученных по шести видеокадрам. Калибровочные зависимости представляют собой непрерывные линии, проходящие через эти точки. Чем большее количество точек, тем более точной будет калибровочная зависимость, т.е. скорость тестового ТС должна быть не более 60 км/час, чтобы получить не мене 10 зафиксированных видеокадров на отрезке пути 6-7 метров, определяемых зоной контроля ВК. Выбираются два любых видеокадра с пластинами ГРЗ, полученных при проезде неизвестного ТС с известными координатами центра пластин ГРЗ N1 и N2. Для этих значений координат центров пластины N1 и N2 неизвестного ТС на оси N координат центра пластины ГРЗ тестового ТС находится их положение (см. Фиг. 3). Затем определяются соответствующие этим координатам точки на калибровочной кривой, после этого определяются соответствующие значения L1 и L2 на оси L пройденного пути и находится отрезок пройденного пути неизвестным ТС вдоль дорожного полотна между первым и вторым видеокадрами ΔL=L2-L1 (Фиг. 3). Зная интервал времени и отрезок пути, пройденный между двумя видеокадрами ΔΤH, находится предварительная скорость неизвестного ТС V=ΔL/ΔΤH, т.к. это будет справедливо только для неизвестного ТС с высотой подвеса пластины ГРЗ, совпадающей с высотой подвеса пластины ГРЗ тестового ТС и движущегося параллельно оси дороги, в противном случае отрезок пути, пройденный неизвестным ТС, будет отличаться. При высоте подвеса, большей высоты подвеса пластины ГРЗ тестового ТС, при проезде зоны контроля пластина будет ближе к камере и поэтому пройдет меньший путь за то же время (Фиг. 1), а скорость будет занижена. Скорость может быть скорректирована следующим образом. Для другой высоты подвеса пластины ГРЗ пройденный путь неизвестным ТС, пользуясь подобием треугольников (Фиг. 1), находится из следующей формулы:

h - высота установки видеокамеры над полотном дороги,
hT - высота подвеса пластины ГРЗ над полотном дороги тестового ТС,
hH - высота подвеса пластины ГРЗ над полотном дороги неизвестного ТС,
WT и WH - ширины пластин ГРЗ на видеокадрах, зафиксированных при проезде через зону контроля ВК тестового ТС и неизвестного ТС для одной и той же координаты центра пластины ГРЗ (Фиг. 4),
ΔL - отрезок пройденного пути неизвестным ТС между двумя видеокадрами при одинаковой высоте подвеса пластины ГРЗ и, соответственно, при равенстве ширин пластин ГРЗ WT=WH,
ΔLH - отрезок пройденного пути неизвестным ТС между двумя видеокадрами с высотой подвеса пластины ГРЗ, равной hH.
Для определения отношения ширин пластин выбирается как минимум один видеокадр с пластиной ГРЗ неизвестного ТС с известной координатой центра пластины ГРЗ и ее шириной. Используя калибровочную зависимость ширины пластины ГРЗ от координаты центра пластины тестового ТС, находится ширина пластины ГРЗ тестового ТС при равенстве координат центра пластины тестового и неизвестного ТС. Для определения отношения ширин пластин могут выбираться два и более видеокадра, по которым находится среднеарифметическое значение отношения ширины пластин ГРЗ тестового и неизвестного ТС. Для примера на Фиг. 4 показан вариант с двумя видеокадрами. Ширины пластин WH1 и WH2 и координаты N1 и N2 центров пластины ГРЗ неизвестного ТС измеряются в первом и втором видеокадрах. Для этих значений координат центров пластины N1 и N2 неизвестного ТС на оси N координат центра пластины ГРЗ тестового ТС находится их положение (см. Фиг. 4). Затем определяются соответствующие этим координатам точки на калибровочной кривой, после этого определяются соответствующие значения WT1 и WT2 на оси W ширины пластины ГРЗ. В качестве отношения ширин пластин ГРЗ тестового и неизвестного ТС берется среднеарифметическое значение WT/WH=(WT1/WH1+WT2/WH2)/2. По найденному пройденному пути (формула 1) между двумя зафиксированными видеокадрами при проезде неизвестного ТС и интервалу времени между этими кадрами находится скорость

Другими словами, реальная скорость неизвестного ТС определяется как произведение вычисленных предварительной скорости ΔL/ΔTH, полученной с использованием калибровочной зависимости пройденного пути от координаты центра пластины ГРЗ тестового ТС и поправочного коэффициента WT/WH, полученного с использованием калибровочной зависимости ширины пластины ГРЗ от координаты центра пластины ГРЗ тестового ТС.
Формула 2 также справедлива и для примеров, приведенных ниже.
Пример 1. При отклонении направления движения неизвестного ТС от оси NY на угол А отрезок пройденного пути ΔLH между двумя видеокадрами будет больше ΔL, а именно ΔLH=ΔL/CosA. При этом на видеокадре размер номера уменьшится WT=WH·CosA. Из этого следует, что при отклонении направления движения неизвестного ТС от оси NY на угол А отрезок пройденного пути между двумя видеокадрами будет определяться из формулы ΔLH=ΔL·(WT/WH), а скорость будет определяться из формулы 2.
Пример 2. Легко показать, что при продольном наклоне дорожного полотна отрезок пройденного пути неизвестным ТС параллельно оси NY между двумя видеокадрами будет определяться из такой же формулы 1, а скорость из формулы 2.
Пример 3. При поперечном наклоне дорожного полотна скорость неизвестного ТС будет определяться из такой же формулы (2), если неизвестное ТС движется параллельно оси NY, т.к. это эквивалентно изменению высоты подвеса пластины ГРЗ.
Пример 4. При поперечном наклоне дорожного полотна и отклонении направления движения неизвестного ТС от оси NY можно также воспользоваться формулой 2 (учитывая пример 1), а в качестве соотношения WT/WH берется среднеарифметическое значение между соотношениями в первом и втором для первого и второго видеокадров (в начале и в конце отрезка пути).
Из примеров, приведенных выше следует, что положение центра пластины ГРЗ измерялось только по одной координате NY, вдоль которой двигалось тестовое ТС. Можно показать, что если тестовое ТС будет двигаться под углом к оси дороги (не параллельно оси NY), то все вышеизложенные примеры будут также справедливы, т.к. в калибровочные зависимости попадают тангенциальные составляющие пройденного пути и ширины пластины, что, в конечном счете, будет учитываться поправочным коэффициентом отношения ширин пластины ГРЗ тестового и неизвестного ТС.
Предлагаемый способ определения скорости ТС был проверен на опытном образце устройства, в котором использовалась видеокамера СVSАвтоБлиц и система фиксации и считывания ГРЗ CVSAbto (разработчик и производитель ООО «Новые Технологии», сайт http://cvsnt.ru). Видеокамера была установлена на высоте 6.5 м над дорожным полотном и расстоянии до зоны распознавания 20 м с длиной зоны распознавания 6 м. Скорость оцифровки системы - 25 кадров в секунду - позволила зафиксировать 10 видеокадров с пластиной ГРЗ тестового автомобиля при проезде им зоны контроля ВК со скоростью 54 км/час. Скорость тестового автомобиля в данном случае определялась системой GPS/ГЛОНАСС. По этим данным были построены калибровочные зависимости пройденного пути и ширины пластины ГРЗ тестовым ТС от координаты центра пластины ГРЗ. В качестве тестового ТС был выбран автомобиль с высотой подвеса пластины ГРЗ 50 см. Это позволило проверять предлагаемый способ определения скорости ТС как для ТС с меньшей, так и с большей высотой подвеса пластины ГРЗ.
Результаты измерений приведены на Фиг. 5, 6. Измеренная скорость ТС и размеры пластины ГРЗ отображаются в главном окне программы после обработки промежуточных результатов.
На Фиг. 5 показан один легковой автомобиль с зафиксированным ГРЗ, вычисленной скоростью - 51 км/час, датой и временем его фиксации - 06.10.2015 7:24:04, измеренной шириной пластины ГРЗ в пикселях - 196 рх.
На Фиг. 6 показаны результаты измерения скорости при проезде потока транспортных средств. Скорость, измеренная предлагаемым способом, сравнивалась со значениями скорости, полученной альтернативными способами. Результаты экспериментов, проведенных на въезде в г. Протвино МО по трассе Серпухов-Обнинск со стороны Калужской области (Акт испытаний, проведенных совместно с УВД РФ, г. Протвино, МО №4/14 от 08.09.14 г.), подтвердили правильность основных принципов, на которых основан предлагаемый способ измерения скорости ТС, а также простоту калибровки и показали высокую точность в определении скорости видеокамерой.
Способ определения скорости транспортного средства, заключающийся в том, что на пути движения транспортного средства размещают видеокамеру и фиксируют видеокадры с изображением пластины государственного регистрационного знака транспортного средства при перемещении его в зоне контроля видеокамеры, измеряют параметры пластины государственного регистрационного знака и определяют значение скорости транспортного средства, отличающийся тем, что калибровку зоны контроля видеокамеры производят посредством проезда тестового транспортного средства с известной постоянной скоростью, для всех видеокадров тестового и любого неизвестного транспортного средства фиксируют время появления, определяют координаты центра и ширину пластины государственного регистрационного знака в системе координат видеокадра в пикселях, по известной скорости и времени проезда зоны контроля видеокамеры вычисляют путь, пройденный тестовым транспортным средством по дорожному полотну, по полученным данным строят калибровочные зависимости для тестового транспортного средства пройденного пути от координаты центра пластины государственного регистрационного знака и ширины пластины государственного регистрационного знака от координаты центра пластины государственного регистрационного знака, затем выбирают два любых видеокадра с пластиной государственного регистрационного знака неизвестного транспортного средства с известными координатами центров пластины государственного регистрационного знака, определяют временной интервал между ними, используя калибровочную зависимость пройденного пути от координаты центра пластины государственного регистрационного знака тестового транспортного средства, находят координаты центра пластины государственного регистрационного знака тестового транспортного средства, совпадающие с координатами центра пластины государственного регистрационного знака неизвестного транспортного средства, и определяют расстояние, пройденное неизвестным транспортным средством по дорожному полотну между выбранными видеокадрами, и вычисляют предварительную скорость, далее выбирают как минимум один видеокадр с пластиной государственного регистрационного знака неизвестного транспортного средства с известной координатой центра пластины государственного регистрационного знака и ее шириной, используя калибровочную зависимость ширины пластины государственного регистрационного знака от координаты центра пластины тестового транспортного средства, находят ширину пластины государственного регистрационного знака тестового транспортного средства при равенстве координат центра пластины тестового и неизвестного транспортного средства, отношение ширин пластин государственного регистрационного знака тестового и неизвестного транспортного средства является поправочным коэффициентом, реальную скорость неизвестного транспортного средства определяют как произведение предварительной скорости и поправочного коэффициента.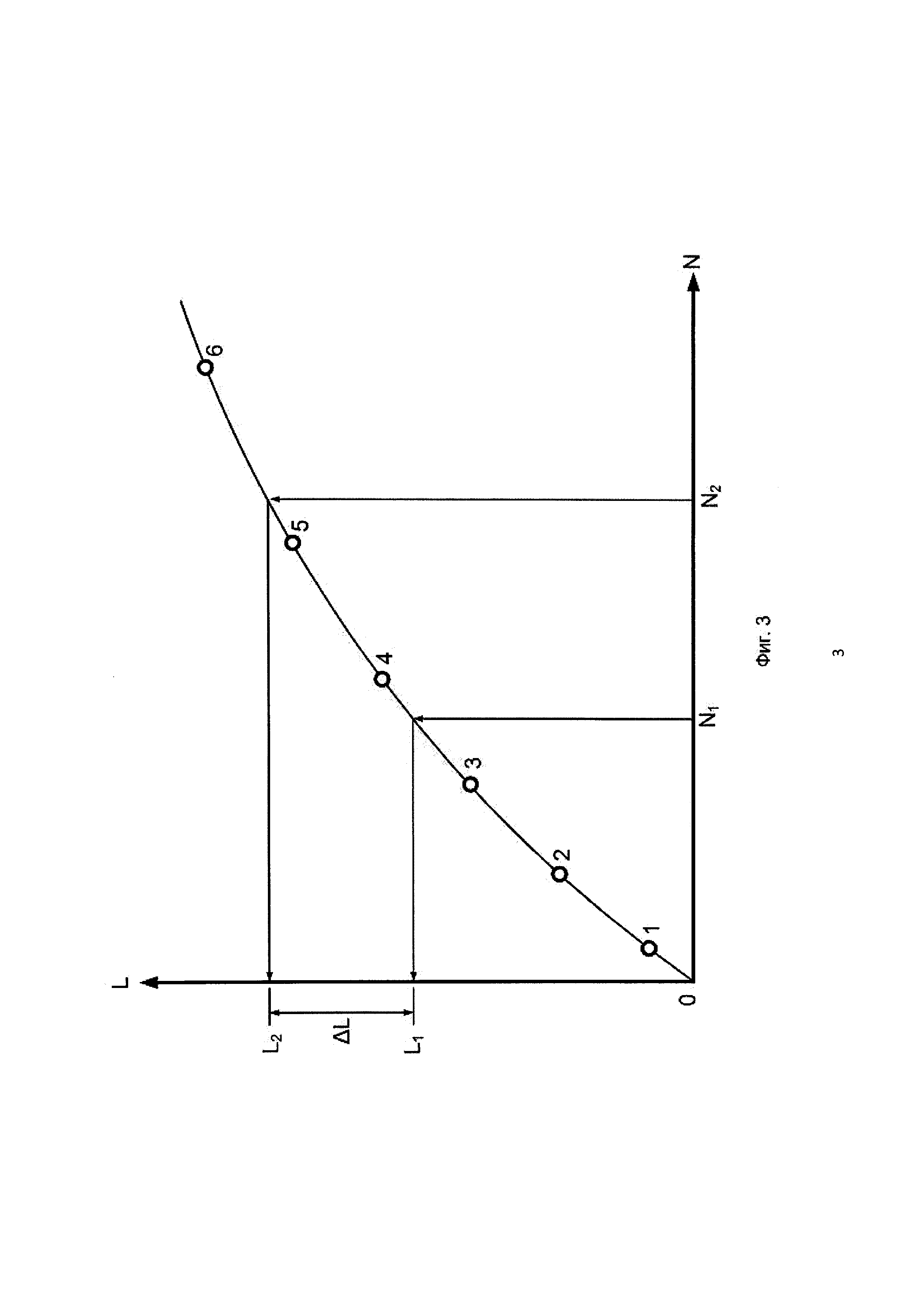


Грузозахватное устройство
Установка для получения диоксида хлора и хлора
Комплекс для переработки твердых отходов
Комплекс для переработки иловых осадков сточных вод
Способ термохимической переработки и утилизации твёрдых измельчённых веществ, содержащих углеводороды, и установка для его осуществления
Способ нанесения полимерного покрытия
Способ очистки ацетона
Способ очистки ацетона-сырца
Полимерная композиция для получения защитно-декоративных покрытий
Способ утилизации твердых углеводородных отходов (в том числе медицинских и биологических) и установка для его осуществления
Грузозахватное устройство
Установка для получения диоксида хлора и хлора

