Результат интеллектуальной деятельности: МОНИТОРИНГ СИГНАЛОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА ВО ВРЕМЯ ДВИЖЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к мультисенсорной системе и способу мониторинга показателя или сигнала жизнедеятельности организма человека или животного.
УРОВЕНЬ ТЕХНИКИ
Показатели или сигналы жизнедеятельности организма являются мерами физиологических статистических данных, часто используемыми работниками здравоохранения для того, чтобы оценить самые основные функции организма. Протокол взятия показателей жизнедеятельности обычно влечет за собой запись температуры тела, частоты пульса (или частоты сердечных сокращений), кровяного давления и частоты дыхания, а также может включать в себя другие измерения. Показатели или сигналы жизнедеятельности организма, такие как частота сердечных сокращений и частота дыхания, являются важными показателями состояния здоровья человека. В больницах осуществляется мониторинг показателей или сигналов жизнедеятельности организма пациента либо непрерывно в отделениях интенсивной терапии (ОРИТ), либо при проверке на местах в палатах, чтобы предотвратить незамеченное ухудшение состояния пациента.
Есть также потребность в мониторинге показателей или сигналов жизнедеятельности организма в домашних условиях. В результате старения населения больше пожилых людей, которые по большей части страдают от хронических заболеваний, живут одни дома и, таким образом, нуждаются в мониторинге состояния их организма, которое может отражаться в изменении показателей или сигналов жизнедеятельности организма. То же самое необходимо проводить для пациентов, которые только выписаны из больницы и по-прежнему требуют мониторинга, чтобы избежать повторной госпитализации.
В применениях, связанных с образом жизни, измерение показателей или сигналов жизнедеятельности организма также желательно, например, во время физических упражнений в фитнес-центре, чтобы помочь оценить энерготраты и проанализировать в общем состояние организма. Это также относится к профессиональному спорту.
При измерении показателей или сигналов жизнедеятельности организма артефакт, связанный с движением, является хорошо известной проблемой, которая относится к ухудшению качества измерений, вызванному активностью измеряемых субъектов. Активность, влияющая на измерение, включает в себя изменение позы, движение, разговор, кашель и т.д. Серьезность этой проблемы возрастает в условиях стационара, где пациенты большую часть времени находятся в постельном режиме, при медико-санитарной помощи на дому, являющемся в основном местом проживания самостоятельно обходящегося человека, и при мониторинге фитнес-упражнений, где субъекты интенсивно двигаются.
Один способ преодоления артефакта, связанного с движением, состоит в том, чтобы собрать «хорошие» части измеренных сигналов жизнедеятельности организма без мешающих влияний и убрать «плохие». Типично, когда измеряемый субъект спит или находится в покое, без особого движения, можно получить показатель или сигнал жизнедеятельности хорошего качества. Этот метод применим в больницах, где пациенты большую часть времени находятся в постельном режиме и под наблюдением, таким образом, обеспечивается наличие достаточных значащих данных, и поэтому допустимо не принимать во внимание данные, подверженные мешающему влиянию артефакта, связанного с движением, обычно являющиеся результатом передвижения пациентов, которые во всяком случае по большей вероятности не подвержены риску.
Однако отмена или отбрасывание данных приводит к потере информации, особенно когда показатели или сигналы жизнедеятельности организма пациента во время активности представляют интерес для диагностических целей. Кроме того, при медико-санитарной помощи на дому субъекты часто более подвижны при их повседневной деятельности, и метод отбрасывания артефакта, связанного с движением, может привести к недостаточной частоте измерений. В применениях, связанных с образом жизни, таких как занятия фитнесом и занятия другими видами спорта, также существует необходимость непрерывного мониторинга показателей или сигналов жизнедеятельности организма, пока субъект активен, с целью оценки энерготрат или оценки физического состояния. Таким образом, новый метод требует вместо исключения данных низкого качества способности надежного получения из этих данных показателей или сигналов жизнедеятельности организма.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в предоставлении усовершенствованного способа и системы мониторинга показателей или сигналов жизнедеятельности организма человека или животного.
Эта цель достигается способом по п. 1 и посредством мультисенсорной системы по п. 8.
Таким образом, предлагается усовершенствованный метод мониторинга, где мониторинг показателей или сигналов жизнедеятельности организма во время движения возможен посредством извлечения показателей или сигналов жизнедеятельности организма из артефактов, связанных с движением, с помощью мультисенсорной системы с датчиками ускорения, выполненными с возможностью измерять вектор ускорения. Компоновка предложенной системы имеет низкую стоимость, не громоздкая, энергосберегающая и удобная для длительного периода мониторинга самостоятельно обходящихся субъектов без наложения ограничений на их повседневную деятельность.
Согласно первому аспекту получение может содержать оценку, основанную на результатах измерений ориентации упомянутых датчиков ускорения, вычисление матрицы поворота, по меньшей мере, двух датчиков ускорения, выравнивание систем координат, по меньшей мере, двух датчиков ускорения посредством виртуального поворота, по меньшей мере, двух датчиков ускорения, и исключение компонентов движения, не индуцированных сигналами жизнедеятельности организма. Таким образом, компоненты, индуцированные движением, могут быть удалены для того, чтобы получить желаемый показатель или сигнал жизнедеятельности организма.
Согласно второму аспекту, который может быть объединен с вышеупомянутым первым аспектом, получение может содержать преобразование возможно коррелированных величин результатов измерений в меньшее число нескорректированных величин, извлечение параметров или признаков из нескорректированных величин и принятие решения о сигналах жизнедеятельности организма на основе извлеченных параметров или признаков. Таким образом, анализ главных компонентов (PCA) используется не для сжатия данных, а для того, чтобы извлекать сигналы жизнедеятельности организма из PCA сигнала от датчиков.
Согласно третьему аспекту, который может быть объединен с любым одним из вышеупомянутых первого и второго аспектов, получение может содержать выбор одного из, по меньшей мере, двух датчиков ускорения в качестве опорного датчика, виртуального поворота других из, по меньшей мере, двух датчиков ускорения по отношению к опорному датчику для того, чтобы удалить компоненты движения, и применение PCA для получения сигналов жизнедеятельности организма. Посредством последовательного применения подавления синфазной помехи в PCA может быть достигнуто улучшенное качество получения.
Согласно четвертому аспекту, который может быть объединен с любым одним из вышеупомянутых первого и третьего аспектов, получение может содержать измерение угловой разницы между векторами ускорений, по меньшей мере, двух датчиков ускорения. Этот метод измерения разностного угла является внутренне устойчивым к помехам, индуцированным движением.
Согласно примеру реализации в соответствии с четвертым аспектом расположение может содержать выравнивание, по меньшей мере, двух датчиков ускорения таким образом, что их оси измерения находятся, по существу, в одной пространственной плоскости. Таким образом, в частности, дыхательное движение приводит к желаемым изменениям относительных ориентаций датчиков ускорения.
Согласно пятому аспекту, который может быть объединен с любым одним из вышеупомянутых первого и четвертого аспектов, по меньшей мере, два датчика ускорения могут быть преимущественно использованы при определении дыхания в качестве инклинометров для того, чтобы отразить движение брюшной полости или грудной клетки, вызванное дыханием, или при определении пульса уловить механическую вибрацию, вызванную сокращением сердца.
Согласно шестому аспекту, который может быть объединен с любым одним из вышеупомянутых первого и пятого аспектов, блок извлечения сигнала может содержать вычислительный блок, который запускает алгоритм для выполнения извлечения сигналов жизнедеятельности организма. Это дает возможность реализации в виде компьютерного программного продукта, содержащего программное средство для осуществления этапа получения при запуске на вычислительном блоке или устройстве.
В примерной реализации два датчика ускорения могут быть двухкомпонентными или трехкомпонентными акселерометрами.
Эти и другие аспекты настоящего изобретения будут очевидны и прояснены со ссылкой на описанные ниже варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На следующих чертежах:
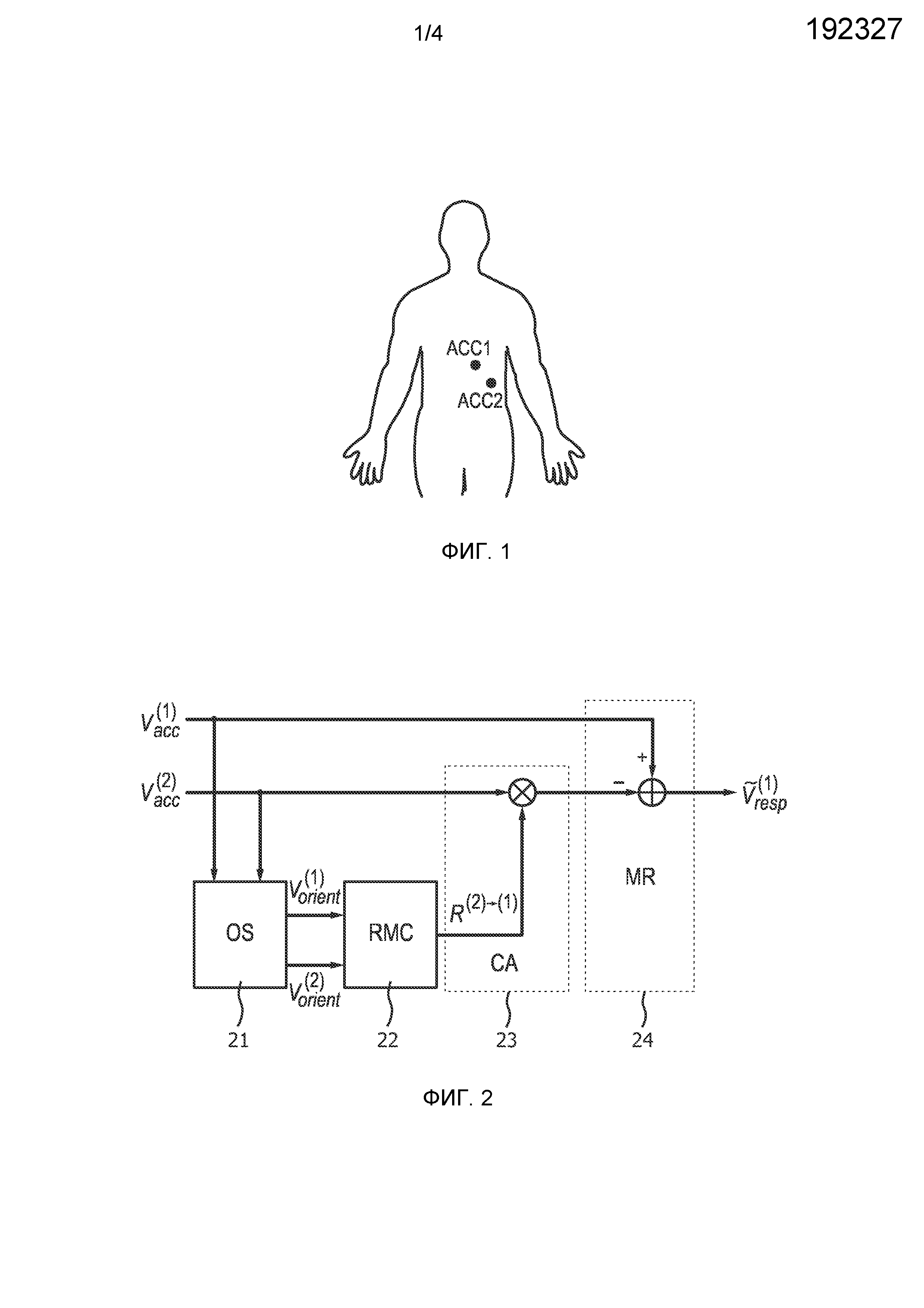
на Фиг. 1 представлены примеры местоположений датчиков при измерении дыхания;
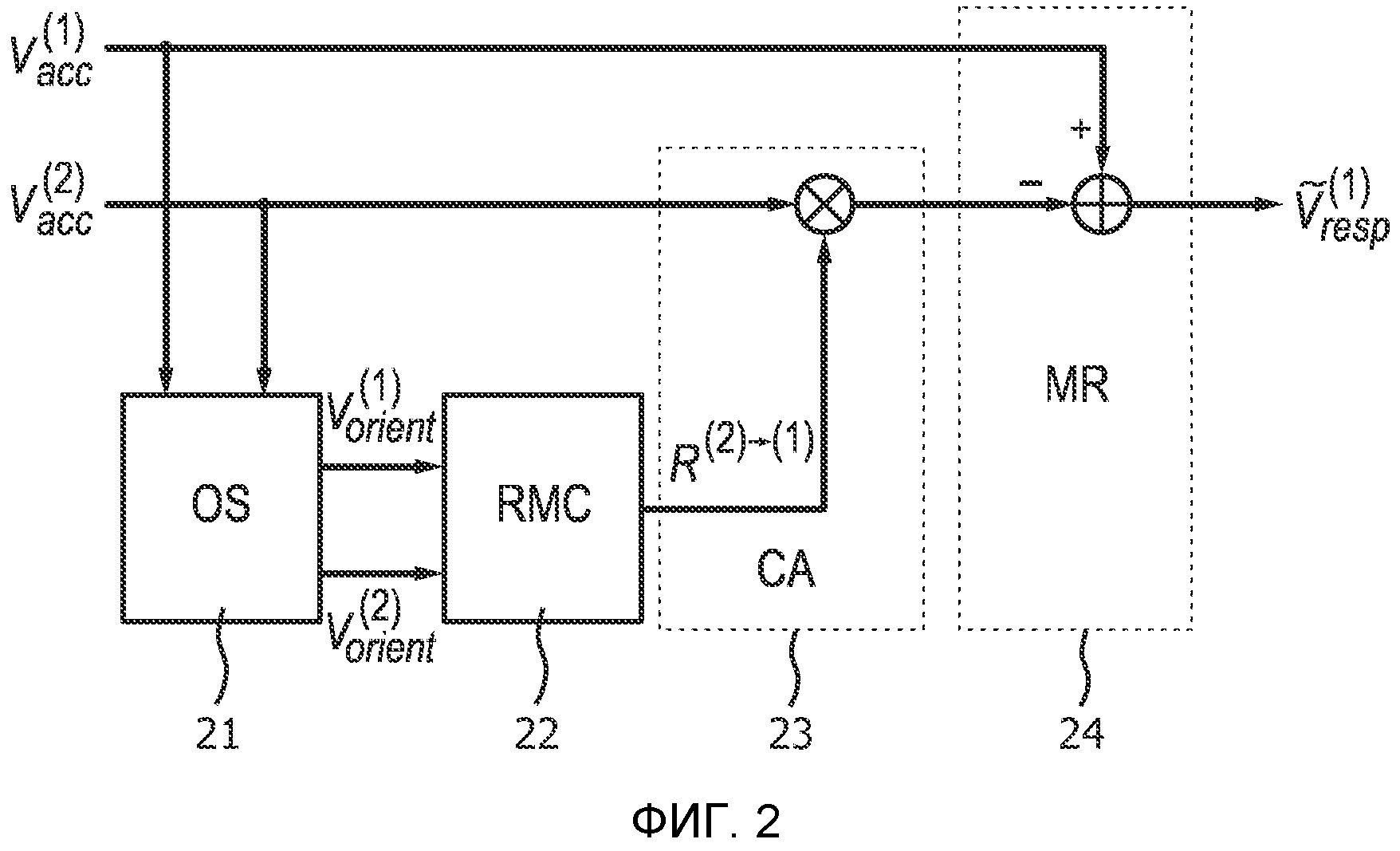
на Фиг. 2 представлена схематичная блок-схема последовательности операций получения в соответствии с первым вариантом осуществления на основе подавления синфазной помехи;
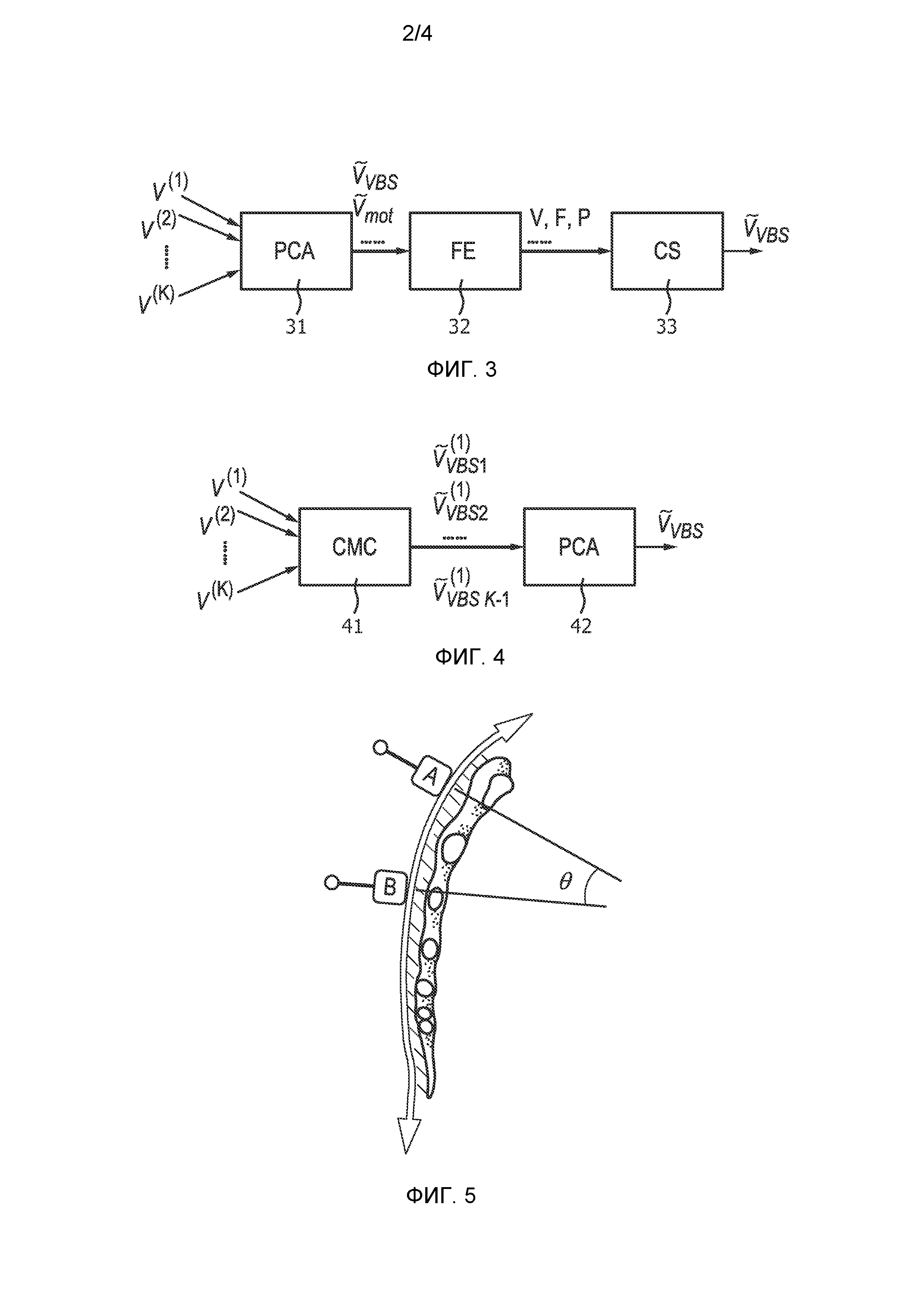
на Фиг. 3 представлена схематичная блок-схема последовательности операций получения в соответствии со вторым вариантом осуществления на основе анализа главных компонентов;
на Фиг. 4 представлена схематичная блок-схема метода получения в соответствии с третьим вариантом осуществления на основе последовательного применения подавления синфазной помехи и анализа главных компонентов.
на Фиг. 5 представлен пример размещения датчика для измерения разностного угла в соответствии с четвертым вариантом осуществления;
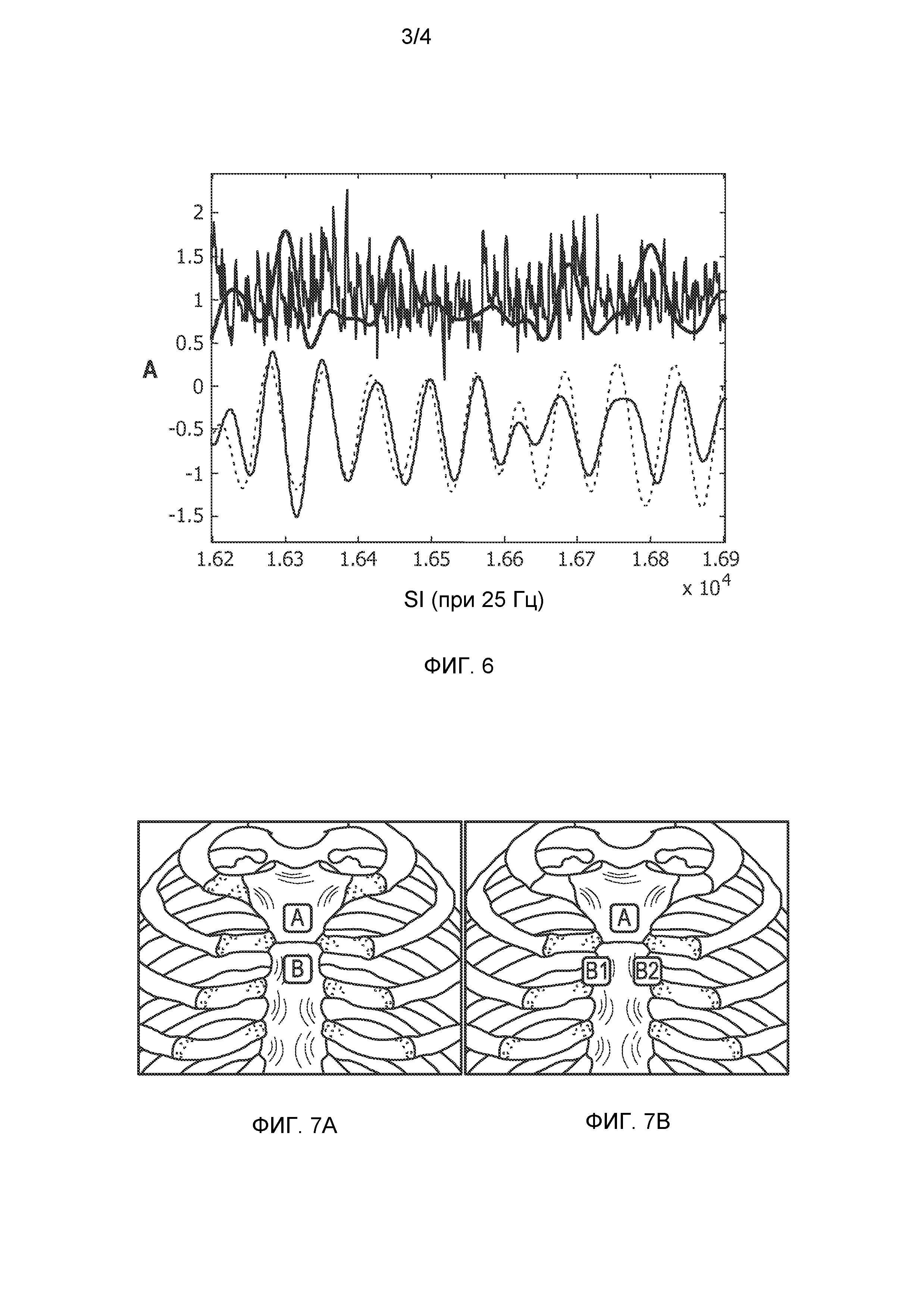
на Фиг. 6 представлены графики измеренного ускорения и полученных дыхательных сигналов, полученных с помощью анализа главных компонентов;
на Фиг. 7A-B представлены примеры размещения акселерометров; и
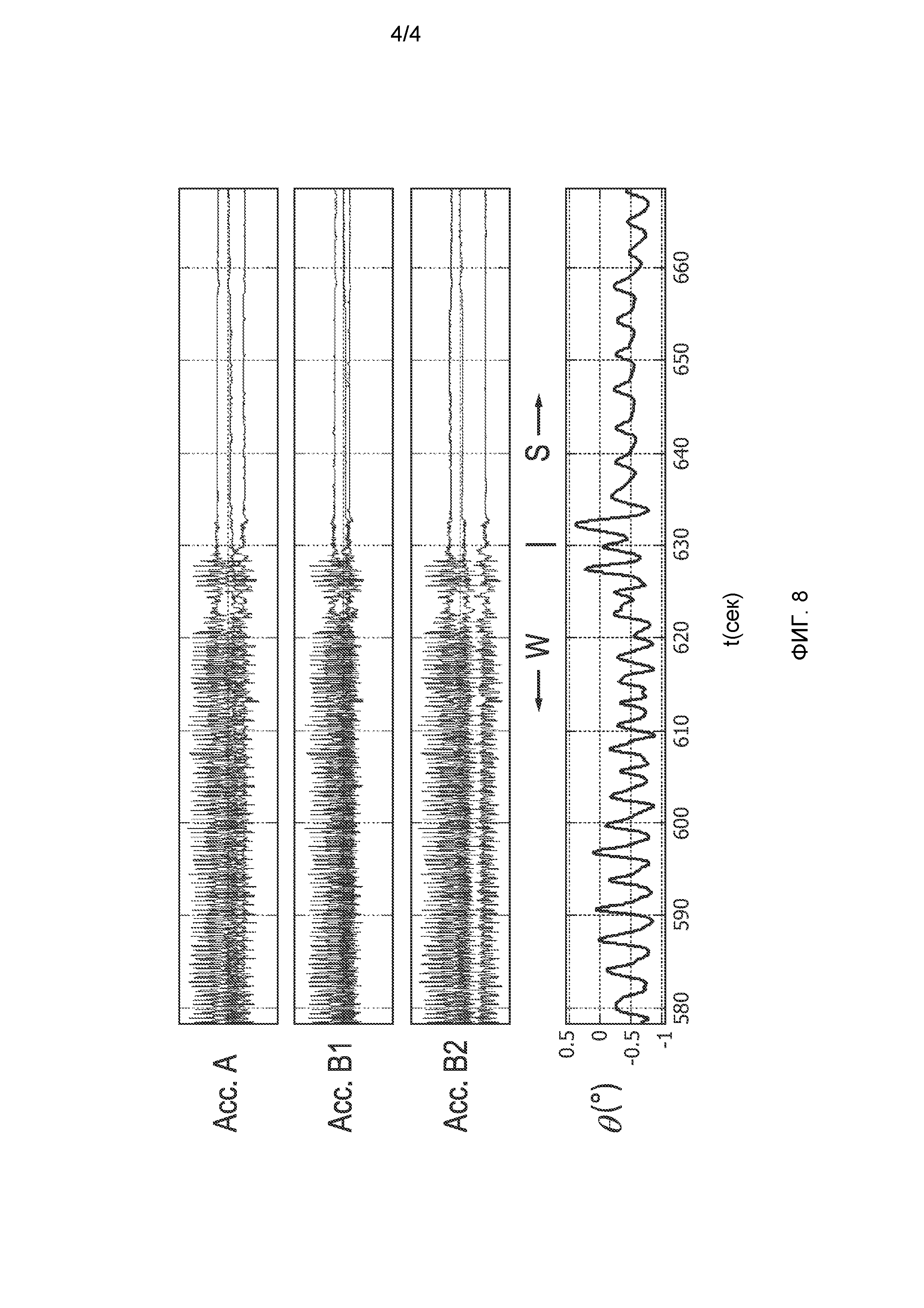
на Фиг. 8 представлены графики измеренных сигналов ускорения и полученных дыхательных сигналов при ходьбе и сидении с использованием измерения разностного угла.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В следующих вариантах осуществления предложен метод мониторинга, где мониторинг показателей или сигналов жизнедеятельности организма во время движения осуществляется при помощи мультисенсорной системы с датчиками ускорения, выполненной с возможностью измерять вектор ускорения.
Предложенная система мониторинга содержит, по меньшей мере, два датчика, которые помещаются на определенных местоположениях на теле человека (или теле животного), которые имеют отношение к измеряемым сигналам показателей жизнедеятельности (т.е. показателям или сигналам жизнедеятельности организма). В примере реализации, основанном на программном обеспечении, вычислительный блок может запускать алгоритм, который позволяет использовать показания нескольких датчиков для извлечения требующихся сигналов жизнедеятельности организма, например дыхания, из измерения с мешающим влиянием артефактов движения. Когда должны быть извлечены несколько сигналов жизнедеятельности организма, например и дыхание, и сердцебиение, могут быть запущены параллельные алгоритмы, служащие для соответствующих целей. Вычислительный блок может также запускать алгоритмы вычисления параметров из извлеченных сигналов жизнедеятельности организма, таких как частота дыхания, частота сердечных сокращений и их изменения, и хранить их для дальнейшего анализа либо локально на носителе информации, либо на удаленной центральной станции по беспроводной линии связи. Конечно, система мониторинга может быть реализована с проводным устройством извлечения сигнала, блоком или процессором обработки сигналов, выполненными с возможностью обработки сигнала в соответствии с вышеупомянутыми алгоритмами, как далее объясняется более подробно.
Так как частота дыхания и сердечных сокращений и их изменения являются параметрами сигналов жизнедеятельности организма, представляющими обычно наибольший интерес, получение этих сигналов может быть достигнуто с помощью трехкомпонентных акселерометров, хотя не исключено использование других типов датчиков. Как описано, например, в T. Reinvuo et al, «Measurement of respiratory rate with high-resolution accelerometer and EMFit Pressure Sensor», в IEEE Sensors Appl. Symposium, февраль 2006, стр.192-195, трехкомпонентный акселерометр представляет собой устройство, которое измеряет ускорение по трем измерительным осям, и используется при определении дыхания в качестве инклинометра для того, чтобы отразить движение брюшной полости или грудной клетки, вызванное дыханием, и в измерении пульса (косвенного измерения сердечного сокращения) для того, чтобы уловить механическую вибрацию на коже, вызванную сокращением сердца. Когда требуется измерить оба сигнала одним трехкомпонентным акселерометром, акселерометр может быть помещен на левой реберной дуге, примерно на одной трети расстояния до грудины.
В следующих вариантах осуществления предлагается некоторое количество сценариев измерений, где в зависимости от того, какой сигнал жизнедеятельности измеряется и какой способ обработки используется, датчики будут размещены на местоположениях на теле, которые являются предпочтительными для этого сценария.
Как уже упоминалось, получение сигнала(ов) жизнедеятельности организма может быть выполнено посредством вычислительного блока, который выполняет алгоритм, или посредством блока извлечения сигнала для извлечения требующегося сигнала жизнедеятельности организма на основе результатов измерений от нескольких датчиков, которые могут быть подвержены мешающему влиянию. Предлагается три схемы получения в различных вариантах осуществления, каждая с предпочтительными местоположениями датчиков, что обеспечивает оптимальную производительность получения сигнала(ов) жизнедеятельности организма.
Первый вариант осуществления направлен на обработку подавления синфазной помехи (CMC), где применяются, по меньшей мере, два датчика ускорения, предпочтительно трехкомпонентные акселерометры. Они крепятся на разных местоположения на туловище субъекта, на этих местоположениях целевой сигнал показателя жизнедеятельности организма оптимально измеряется, когда субъект находится в состоянии покоя. Во время движения, когда датчики совместно размещены надлежащим образом, индуцированные движением компоненты будут возникать как «синфазная помеха» в сигналах вектора ускорения от датчиков, в то время как сигнал жизнедеятельности организма измеряется по-другому отдельными датчиками. Используя этот факт, сигнал жизнедеятельности организма может быть получен в присутствии артефактов, связанных с движением.
Измерение дыхания с помощью трехкомпонентных акселерометров теперь описывается, как пример первого варианта осуществления и как изображено на Фиг. 1. В этом примере два трехкомпонентных акселерометра ACC1 и ACC2 размещаются на левой стороне грудной клетки измеряемого субъекта. Вообще, датчики ACC1 и ACC2 могут быть размещены в любом месте в области грудная клетка - брюшная полость, которая является подходящей для определения дыхания, т.е. изменение угла, индуцированное желаемым сигналом(ами) жизнедеятельности организма отличается у двух датчиков ACC1 и ACC2. В этом примере, их расположение выбрано таким образом, что изменение угла нескольких датчиков, индуцированное дыханием, отличается насколько возможно друг от друга. Пример основан на применении биодатчиков, где местоположения датчиков выбираются для измерения дыхания.
Векторы показаний двух датчиков ACC1 и ACC2 могут быть выражены как:


где  и
и  представляют измеренный сигнал вектора ускорения и его компоненты, индуцированные дыханием и движением, соответственно, от i-го датчика. Касательно трехкомпонентного акселерометра, сигнал является вектором в системе координат датчика, определенной показаниями по х, у и z осям. Следует заметить, что для определения дыхания (в основном) измеряется вызванное дыхательным движением изменение силы тяжести, проецируемой на оси датчика. Таким образом, акселерометр используется здесь в качестве инклинометра. Любое инерционное ускорение, как правило, генерируемое в высокочастотном диапазоне, предположительно отфильтровывается во время предварительной обработки сигнала.
представляют измеренный сигнал вектора ускорения и его компоненты, индуцированные дыханием и движением, соответственно, от i-го датчика. Касательно трехкомпонентного акселерометра, сигнал является вектором в системе координат датчика, определенной показаниями по х, у и z осям. Следует заметить, что для определения дыхания (в основном) измеряется вызванное дыхательным движением изменение силы тяжести, проецируемой на оси датчика. Таким образом, акселерометр используется здесь в качестве инклинометра. Любое инерционное ускорение, как правило, генерируемое в высокочастотном диапазоне, предположительно отфильтровывается во время предварительной обработки сигнала.
Поскольку туловище человека является относительно жестким, датчики ACC1 и ACC2 испытывают такое же поворотное изменение во время движения, особенно если они расположены близко друг к другу, так что относительное движение между датчиками, например в связи с растяжением кожи, сведено к минимуму. После того как датчики ACC1 и ACC2 выровнены, то есть поворачиваются один по отношению к другому, пока они не станут параллельны каждой из своих трех осей, их компоненты вектора силы тяжести становятся равными.
С другой стороны, движение при дыхании является в основном объемным расширением и сжатием туловища. Датчики ACC1 и ACC2 расположены в разных точках на туловище и поэтому испытывают, благодаря его искривленной поверхности, различные поворотные движения. Таким образом, компоненты сигнала, индуцированного дыханием, отличаются даже с выровненными друг относительно друга датчиками ACC1 и ACC2.
На Фиг. 2 представлена схематичная блок-схема последовательности операций получения или блока извлечения сигнала в соответствии с первым вариантом осуществления на основе подавления синфазной помехи (CMC).
С учетом приведенных выше объяснений, сигнал дыхания может быть получен из результата измерения, подверженного мешающему влиянию движения, с помощью следующей представленной для примера многоступенчатой процедуры, которая может быть реализована как программа системы программного обеспечения для вычислительного блока или как последовательности операций обработки сигнала для блока извлечения сигнала.
На первом этапе или стадии (OS) 21 оценивается ориентация датчика. Здесь оценивается ориентация датчиков ACC1 и ACC2, которая определяется как проекция силы тяжести на три оси датчика. Ее можно достаточно хорошо оценить, взяв (близкие) постоянные составляющие на выходе акселерометра, обозначив как

Оценка может быть реализована посредством низкочастотной фильтрации  или использования более продвинутых алгоритмов. Так как диапазон типичной частоты дыхания составляет от 0,1 Гц до 2 Гц, отсечка низкочастотной фильтрации должна быть не ниже 0,1 Гц.
или использования более продвинутых алгоритмов. Так как диапазон типичной частоты дыхания составляет от 0,1 Гц до 2 Гц, отсечка низкочастотной фильтрации должна быть не ниже 0,1 Гц.
На втором этапе или стадии (RMC) 22 для того, чтобы выровнять два датчика ACC1 и ACC2, рассчитывается матрица поворота. Матрица поворота может быть вычислена путем решения уравнения

или

где  и
и  обозначают матрицы поворота, при поворачивании первого датчика по отношению ко второму и наоборот, соответственно. Матрица поворота R представляет собой матрицу 3×3, которая может быть разложена как произведение трех матриц подповоротов Rx(θ), Ry(φ) и Rz(ψ). Эти три матрицы представляют, последовательно, поворот в плоскости на θ вокруг оси х, поворот в плоскости на φ вокруг оси y и поворот в плоскости на ψ вокруг оси z. Таким образом, фактически матрица R содержит три неизвестных, и уравнение (4) или (5) решаются.
обозначают матрицы поворота, при поворачивании первого датчика по отношению ко второму и наоборот, соответственно. Матрица поворота R представляет собой матрицу 3×3, которая может быть разложена как произведение трех матриц подповоротов Rx(θ), Ry(φ) и Rz(ψ). Эти три матрицы представляют, последовательно, поворот в плоскости на θ вокруг оси х, поворот в плоскости на φ вокруг оси y и поворот в плоскости на ψ вокруг оси z. Таким образом, фактически матрица R содержит три неизвестных, и уравнение (4) или (5) решаются.
На третьем этапе или стадии (CA) 23 один из датчиков ACC1 или ACC2 виртуально поворачивается по отношению к другому датчику так, чтобы две системы координат датчиков ACC1 и ACC2 пространственно выровнялись. Если второй датчик поворачивается к первому, то поворот может быть реализован путем умножения обеих частей уравнения (2) на

Иначе уравнение (1) умножается на .
На четвертом этапе или стадии (MR) 24 компоненты движения отменяются или удаляются. На основании ранее упомянутого эффекта при определении дыхания и движения имеет место следующее:

Вычитание уравнения (6) из уравнения (1) с использованием уравнения (7) приводит к:

где  заново сконструированный сигнал, содержащий компоненты дыхания от двух первоначальных сигналов датчика, которые складываются линейно. Аналогичным образом, когда первый датчик выбирается для поворачивания, получаем следующее уравнение:
заново сконструированный сигнал, содержащий компоненты дыхания от двух первоначальных сигналов датчика, которые складываются линейно. Аналогичным образом, когда первый датчик выбирается для поворачивания, получаем следующее уравнение:

В обоих сигналах компоненты, индуцированные движением, были удалены. Дальнейшая обработка может осуществляться на полученном сигнале дыхания для извлечения параметров таких, как скорость и изменение скорости.
В другой реализации первого варианта осуществления или других вариантов осуществления, для дальнейшего снижения локального и взаимного движения, несколько датчиков могут быть соединены с использованием материалов, которые могут до некоторой степени ограничить свободу перемещения датчиков, в основном по поверхности кожи, но все еще достаточно гибко, чтобы не ограничивать дыхание и обеспечивать удобство при ношении.
На Фиг. 3 представлена схематичная блок-схема последовательности операций получения на основе множества датчиков в соответствии со вторым вариантом осуществления на основе анализа главных компонентов (PCA).
Для измерения дыхания и/или пульса, по меньшей мере, два датчика ускорения крепятся к субъекту. Датчики могут быть трехкомпонентными акселерометрами и размещены на местоположениях на теле, которые являются оптимальными для измеряемого типа (типов) сигнала жизнедеятельности организма, чтобы получить изменение угла, индуцированного сигналами жизнедеятельности организма, которое отличается, по меньшей мере, у двух датчиков. Например, при мониторинге только дыхания датчики располагаются на нижних ребрах (примерно 6-м и 7-м), примерно на полпути между центральным и боковым положением; для обоих измерений дыхания и пульса - на одной трети пути от грудины по реберной дуге.
Во втором варианте осуществления, а также других вариантах осуществления датчики могут быть прикреплены вокруг нужных местоположений на теле отдельно как дискретные компоненты или интегрированы, формируя массив на накладке. Преимуществом матрицы датчиков является то, что она облегчает прикрепление и может содержать больше элементов датчика за счет миниатюризации. Другое преимущество может быть в том, что некоторые искажающие движения ограничены, например, неблагоприятное взаимное движение, как упоминалось в предыдущем разделе.
Предполагается, что используется K датчиков. После соответствующей фильтрации в зависимости от диапазона частот представляющего интерес сигнала и предварительной обработки показание i-го датчика может быть записано как

где  - требующийся физиологический сигнал,
- требующийся физиологический сигнал,  - сигнал, индуцированный движением, и
- сигнал, индуцированный движением, и  - другие компоненты сигнала, содержащие в основном шум. Заметим, что если применяются трехкомпонентные акселерометры и каждая ось рассматривается как измерительный блок, количество выходов датчиков фактически 3K, таким образом, утраивается. Статистически K (или 3K) выходов датчика коррелируют, но их компоненты
- другие компоненты сигнала, содержащие в основном шум. Заметим, что если применяются трехкомпонентные акселерометры и каждая ось рассматривается как измерительный блок, количество выходов датчиков фактически 3K, таким образом, утраивается. Статистически K (или 3K) выходов датчика коррелируют, но их компоненты  сигнала статистически не коррелируют друг с другом, так как они индуцируются независимыми источниками.
сигнала статистически не коррелируют друг с другом, так как они индуцируются независимыми источниками.
На первом этапе или стадии (PCA) 31 выполняется процедура PCA, которая преобразует число возможно коррелирующих переменных в меньшее число некоррелирующих переменных, называемых главными компонентами. Первый главный компонент рассчитывается для как можно большей изменчивости в данных, и каждый последующий компонент рассчитывается для как можно большей оставшейся изменчивости. После применения PCA к К (или 3K) выходов датчика, компоненты, которые содержат только нужный сигнал жизнедеятельности организма и только сигнал, индуцированный движением, могут быть записаны следующим образом


соответственно, где pi и qi - коэффициенты PCA. Таким образом, сигнал жизнедеятельности организма получают из измерения, подверженного мешающему влиянию движения.
Поскольку величина сигнала, вызванного движением, обычно (намного) больше, чем сигнал жизнедеятельности организма, обычно второй главный компонент является сигналом жизнедеятельности организма, когда бы ни было обнаружено движение. Однако для более надежного результата требуется усовершенствованный способ выбора компонента, который может быть осуществлен с помощью алгоритма классификации.
На втором этапе или стадии (FE) 32 на Фиг. 3 процедура или алгоритм выполнен с возможностью извлекать параметры (или признаки) из результирующих компонентов PCA. Возможными признаками являются дисперсия сигнала, основная частота, периодичность и т.д.
На третьем этапе или стадии (CS) 33 выбор компонента достигается посредством принятия решения, какой компонент, наиболее вероятно, является сигналом жизнедеятельности организма.
На Фиг. 4 представлена схематичная блок-схема метода получения в соответствии с третьим вариантом осуществления на основе последовательного применения CMC и PCA.
Сочетание способов CMC и PCA можно рассматривать, особенно, когда работает более двух датчиков. Предполагается, что используется K датчиков.
На первом этапе или стадии (CMC) 41 один из K датчиков выбирается первым в качестве опорного. Тогда, следуя этапам или стадиям в приведенном выше методе получения, основанном на CMC, другие датчики виртуально поворачиваются по отношению к опорному датчику, чтобы удалить компоненты движения. В результате генерируется K-1 сигнал. Наконец, на втором этапе или стадии (PCA) 42 вышеупомянутый метод получения на основе PCA применяется к этим K-1 сигналам для того, чтобы получить требующийся сигнал жизнедеятельности организма. Посредством последовательного применения двух методов в дальнейшем предпринимается попытка преодоления неполного удаления движения в CMC, приводящего к улучшению качества получения. В примере на Фиг. 4 датчик V(i) выбран в качестве опорного датчика.
Ниже описывается четвертый вариант осуществления, в котором измерение разностного угла (DAM) применяется для получения нужного сигнала жизнедеятельности организма.
Датчики, такие как акселерометры, имеют анизотропные чувствительности. То есть выход датчика не является независимым от пространственного направления входного воздействия на него. Всякий раз, когда два или более таких датчиков используются таким образом, что их входы в некоторой общей системе координат очень похожи (в идеале идентичны), эта анизотропия может быть использована для оценки относительных ориентаций локальных систем координат различных датчиков. Поэтому, если такие датчики могут быть применены таким образом, что (изменения в) их относительных ориентаций в основном содержат информацию о некоторых показателях жизнедеятельности организма, то эти показатели жизнедеятельности организма можно наблюдать при наличии любого ненулевого входа в датчиках. Является ли такой метод пригодным или нет, зависит от общего несходства между входами на местоположениях датчиков, по сравнению с величиной изменения(ий) представляющей интерес ориентации.
В качестве примера, два двухкомпонентных акселерометра могут быть прикреплены к коже в двух разных местоположениях, чтобы наблюдать дыхательное движение. Акселерометры выравниваются таким образом, что их оси измерения находятся в (почти) той же плоскости пространства. Местоположения выбираются так, что входы акселерометров по существу схожи в общей системе координат. На практике это часто означает, что расстояние между местоположениями должно быть мало. В то же время местоположения выбираются так, что в особенности дыхательное движение приводит к изменениям в относительной ориентации акселерометров.
На Фиг. 5 представлен пример размещения датчика, где два акселерометра A, B расположены в верхней части грудины. Во время дыхания угол θ изменяется в ответ на расширение и сжатие полости грудной клетки, имея результатом измерение дыхательного движения. Чтобы довести до максимума этот эффект, два датчика находятся предпочтительно за точкой, которая отделяет основную часть грудины от верхней ее части, рукоятки грудины. Таким образом, ориентации между акселерометрами меняются, так как вдох растягивает кожу над арочной формой грудины, таким образом увеличивая угол θ, в то время как выдох реверсирует изменение.
Теперь, любой ненулевой вход акселерометра, который не является просто ортогональным к направлению изменений ориентации достаточно для того, чтобы наблюдать дыхательное движение. Вход акселерометра может быть результатом силы тяжести, например, когда измеряемый объект находится в состоянии покоя, или инерционные ускорения, индуцированные движением тела во время активности. Благодаря принципу их измерения этот основанный на DAM метод, следовательно, внутренне устойчив к движениям.
Обычные, основанные на DAM системы можно сравнить с CMC способами, где два датчика измеряют сигнал по-разному и сигнал жизнедеятельности организма получают путем вычитания. Однако в предлагаемом основанном на DAM методе в соответствии с четвертым вариантом осуществления измеряют угловую разницу между векторами ускорений от двух датчиков A, B. Таким образом, это не разница в углах (поворота и/или смещения) между двумя датчиками A, B, а разница в измеряемых векторах ускорения внутри систем датчика. Предлагаемый метод является, следовательно, гораздо более чувствительным к артефактам, связанным с движением. Датчики A, B в этом случае могут быть расположены на грудине, например, очень близко друг к другу.
Основываясь на этом примере, сигнал, связанный с дыхательным движением, может быть получен из выходов акселерометров следующим образом, предполагая, что плоскость датчика двух акселерометров ортогональна к поверхности тела,



где xA, yA, xB, yB
- выходные сигналы x- и y-оси акселерометров A и B, и  - сигнал, связанный с дыхательным движением. Возможны альтернативы этому конкретного способа расчета ориентационной разницы.
- сигнал, связанный с дыхательным движением. Возможны альтернативы этому конкретного способа расчета ориентационной разницы.
Следует отметить, что, следуя вышеупомянутому принципу, могут быть легко разработаны более общие процедуры для трехкомпонентных акселерометров.
Подобно последовательному применению способа CMC и PCA, если более чем один угол получается путем измерения разностного угла, PCA затем может быть применен в четвертом варианте осуществления для извлечения компонентов, наиболее тесно связанных с представляющим интерес сигналом жизнедеятельности организма.
На Фиг. 6 представлены графики измеряемых амплитуд А сигналов ускорения и дыхания, полученных с помощью анализа главных компонентов в соответствии с вышеупомянутым вторым вариантом осуществления.
В этом примере для измерения дыхания три трехкомпонентных акселерометра были размещены слева, справа реберных дуг и брюшной полости испытуемого субъекта. Диапазон дыхания по охвату грудной клетки был использован в качестве опорного. Во время измерения субъект по инструкции выполнял ходьбу, бег, лежал, сидел и работал за письменным столом в лаборатории. Показания датчика были повторно отобраны при 25 Гц перед дальнейшей обработкой. Верхняя сильно изменяющаяся форма кривой на Фиг. 6 соответствует исходному сигналу, измеряемому по оси х датчика, расположенного слева на грудной клетке. Верхняя полужирная форма кривой соответствует его пропущенной через фильтр нижних частот версии (отсечка на 1 Гц). Нижняя пунктирная форма кривой соответствует полученной дыхательной компоненте, а нижняя непрерывная форма кривой соответствует опорному сигналу диапазона дыхания.
Принимая во внимание снятие показаний с каждой оси как отдельного измерения, в способе PCA было в общей сложности 3×3=9 входов. На Фиг. 6 представлена часть кривой, измеренной при ходьбе, а также выбранного компонента после PCA, который имеет большое сходство с опорным дыхательным сигналом, измеренным в диапазоне дыхания.
В другом эксперименте, акселерометры A, B и A, B1, B2, соответственно, были размещены, как показано на Фиг. 7A и 7B, по отношению к костным структурам. На левой Фиг. 7А представлена базовая конфигурация с двумя акселерометрами A, B и на правой Фиг. 7В представлена усовершенствованная версия с тремя акселерометрами A, B1 и B2, которая была применена при эксперименте. Благодаря усовершенствованной конфигурации сигналы от акселерометров B1 и B2 усредняются для формирования более устойчивого варианта, чем вариант с одним акселерометром B.
На Фиг. 8 представлены кривые ускорений измеренных акселерометрами A, B1 и B2 на Фиг. 7В во время ходьбы W и сидения S в трех верхних строках, и полученный способом DAM дыхательный сигнал в последнем ряду.
В первых трех строках на Фиг. 8, различные кривые представляют показания разных осей акселерометра. Последняя строка показывает угол θ, вычисленный согласно приведенной выше формуле DAM и затем пропущенный через фильтр нижних частот с частотой отсечки 1 Гц.
Это изобретение может применяться во всех позициях, где осуществляется мониторинг показателей жизнедеятельности организма, таких как дыхание, с помощью ношения на теле датчиков, например акселерометров. Целевыми применениями могут быть как мониторинг состояния пациента в больницах, медико-санитарная помощь на дому или в детских консультациях, так и во время обычного время препровождения пользователей, например измерение показателя жизнедеятельности организма во время занятий фитнесом и спортом.
Таким образом, были описаны мультисенсорная система и способ мониторинга сигналов жизнедеятельности организма во время движения тела человека или животного, где датчики ускорения размещены на местоположениях на теле таким образом, что изменение угла ускорения, индуцированное упомянутыми сигналами жизнедеятельности организма, отличается, по меньшей мере, между двумя датчиками ускорения. Получение сигналов жизнедеятельности организма достигается путем извлечения требующегося сигнала жизнедеятельности организма на основе результатов измерений от нескольких датчиков, которые могут быть подвержены мешающему влиянию. Предлагается три последовательности операций получения, каждая с предпочтительными местоположениями датчиков, которые обеспечивают оптимальную производительность получения сигнала(ов) жизнедеятельности организма.
Изучив чертежи, описание и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа. Один процессор, блок измерения или другой блок могут выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные характеристики перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих характеристик нельзя использовать с пользой.
Следует отметить, что предлагаемое решение в соответствии с вышеупомянутыми вариантами осуществления могут быть реализованы, по меньшей мере, частично в модулях программного обеспечения в соответствующих функциональных блоках на Фиг. 2-4. Полученный в результате компьютерный программный продукт может содержать программное средство для предписания компьютеру выполнять этапы вышеупомянутых процедур функций на Фиг. 2-4. Таким образом, процедурные этапы выполняются компьютерным программным продуктом при работе на компьютере. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель информации, поставляемый вместе или как часть другого оборудования, но также может распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые номера позиций в формуле изобретения не должны рассматриваться в качестве ограничения ее объема.
Настоящее изобретение относится к мультисенсорной системе и способу мониторинга сигналов жизнедеятельности организма во время движения тела человека или животного, где датчики ускорения размещены на местоположениях на теле таким образом, что изменение угла ускорения, индуцированное упомянутыми сигналами жизнедеятельности организма, отличается, по меньшей мере, между двумя датчиками ускорения. Получение сигналов жизнедеятельности организма достигается путем извлечения требующегося сигнала жизнедеятельности организма на основе результатов измерений от нескольких датчиков, которые могут быть подвержены мешающему влиянию.
Предлагается три последовательности операций получения, каждая с предпочтительными местоположениями датчиков, что обеспечивает оптимальную производительность извлечения сигнала жизнедеятельности(ов) организма.
Респираторные мониторы и способы мониторинга дыхания
Определение затрат энергии пользователя
Устройство определения движения
Устройство для мониторинга пользователя и способ для калибровки устройства
Устройство мониторинга для мониторинга физиологического сигнала
Способы количественного определения нуклеиновых кислот
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

