Результат интеллектуальной деятельности: ПОЛУЧЕНИЕ ДАННЫХ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ (СТ)
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Приведенное ниже относится, в целом, к получению данных системы визуализации, и описано с конкретным применением для компьютерной томографии (CT).
УРОВЕНЬ ТЕХНИКИ
Сканер компьютерной томографии (CT) включает в себя поворотную часть, поддерживаемую с возможностью поворота неподвижной частью. Поворотная часть поддерживает рентгеновскую трубку, которая испускает излучение, которое проходит через область исследования и, в ходе этого, через часть объекта или субъекта, и матрицу детекторов, которая обнаруживает излучение, проходящее через область исследования, и генерирует данные проекции, показывающие обнаруженное излучение. Реконструктор восстанавливает данные проекции и генерирует объемные данные изображения, показывающие часть объекта или субъекта в области исследования. На основании данных изображения может быть сгенерировано одно или более изображений.
Матрица детекторов включает в себя пиксели детекторов, которые преобразуют обнаруженные фотоны рентгеновского излучения в электрические сигналы, указывающие на них. Для каждого оборота поворотного гентри пиксели детекторов обнаруживают и преобразуют фотоны рентгеновского излучения для множества периодов интегрирования, каждый из которых соответствует различному диапазону угловых положений. Временная продолжительность периода интегрирования зависит от скорости поворота поворотного гентри и числа периодов интегрирования для каждого оборота сканирования. При использовании набора интегрирующих детекторов, в начале каждого периода интегрирования интеграторы для пикселей детекторов перезапускаются, и затем интеграторы принимают и интегрируют электрические сигналы за периоды интегрирования. Интегрированные сигналы формируют данные проекции для этого периода интегрирования.
Реконструктор обрабатывает данные проекции для заданного периода интегрирования как соответствующие конкретному диапазону угловых положений. Однако если временная привязка периода интегрирования относительно углового положения является неточной, то фактические данные проекции соответствуют другому диапазону угловых положений, и это может привести к снижению качества изображения для данных восстановленного изображения. К сожалению, имеется естественная погрешность положения поворотного гентри, в которой преобладающим нарушением скорости поворотного гентри является дисбаланс, который является функцией угла поворотного гентри, и величина угловой ошибки вследствие дисбаланса является функцией, обратно пропорциональной кубу скорости поворота.
Устройство высокоточного определения положения поворотного гентри большого диаметра использовалось для определения фактического положения поворотного гентри, которое использовалось для синхронизации временной привязки периода интегрирования и диапазона угловых положений поворотного гентри. Такое устройство включало в себя кодировщик и датчик положения высокого разрешения, вспомогательную электронику, источник питания, и контактное кольцо для передачи данных между поворотной и неподвижной частями сканера. К сожалению, такие устройства обычно являются сложными и дорогими и увеличивают общую стоимость сканера.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты настоящей заявки решают указанные выше и другие вопросы.
В соответствии с одним из аспектов, система визуализации включает в себя неподвижный гентри и поворотный гентри, поддерживаемый с возможностью вращения неподвижным гентри и выполненный с возможностью вращения вокруг области исследования. Система также содержит источник излучения, находящийся на поворотном гентри, который выполнен с возможностью испускания излучения, которое проходит через область исследования, и матрицу детекторов, удерживаемую поворотным гентри и расположенную напротив источника излучения через область исследования, которая обнаруживает излучение, которое проходит через область исследования. Матрица детекторов обнаруживает излучение для множества периодов интегрирования во время вращения поворотного гентри, при этом множество периодов интегрирования соответствует различным диапазонам угловых положений, и матрица детекторов генерирует сигнал, указывающий на обнаруженное излучение, соответственно, для множества периодов интегрирования. Система также содержит контроллер периодов интегрирования, который генерирует сигнал временной привязки периода интегрирования, который включает в себя временную привязку для начала каждого периода интегрирования для оборота поворотного гентри, на основании по меньшей мере временной продолжительности предыдущего оборота поворотного гентри вокруг области исследования, при этом сигнал временной привязки интегрирования используется для инициации множества периодов интегрирования.
В соответствии с другим аспектом, способ включает в себя генерацию сигнала временной привязки периода интегрирования, включающего в себя временную привязку множества периодов интегрирования получения данных для оборота поворотного гентри системы визуализации, при этом сигнал временной привязки периода интегрирования генерируется на основании по меньшей мере временной продолжительности предыдущего оборота поворотного гентри.
В соответствии с другим аспектом, способ включает в себя корректировку предсказанной временной привязки получения данных периода интегрирования по отношению к поворотному гентри системы визуализации из-за дисбаланса поворотного гентри.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может принимать форму различных компонентов и компоновок компонентов, а также различных этапов и расположения этапов. Чертежи предназначены только для целей иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
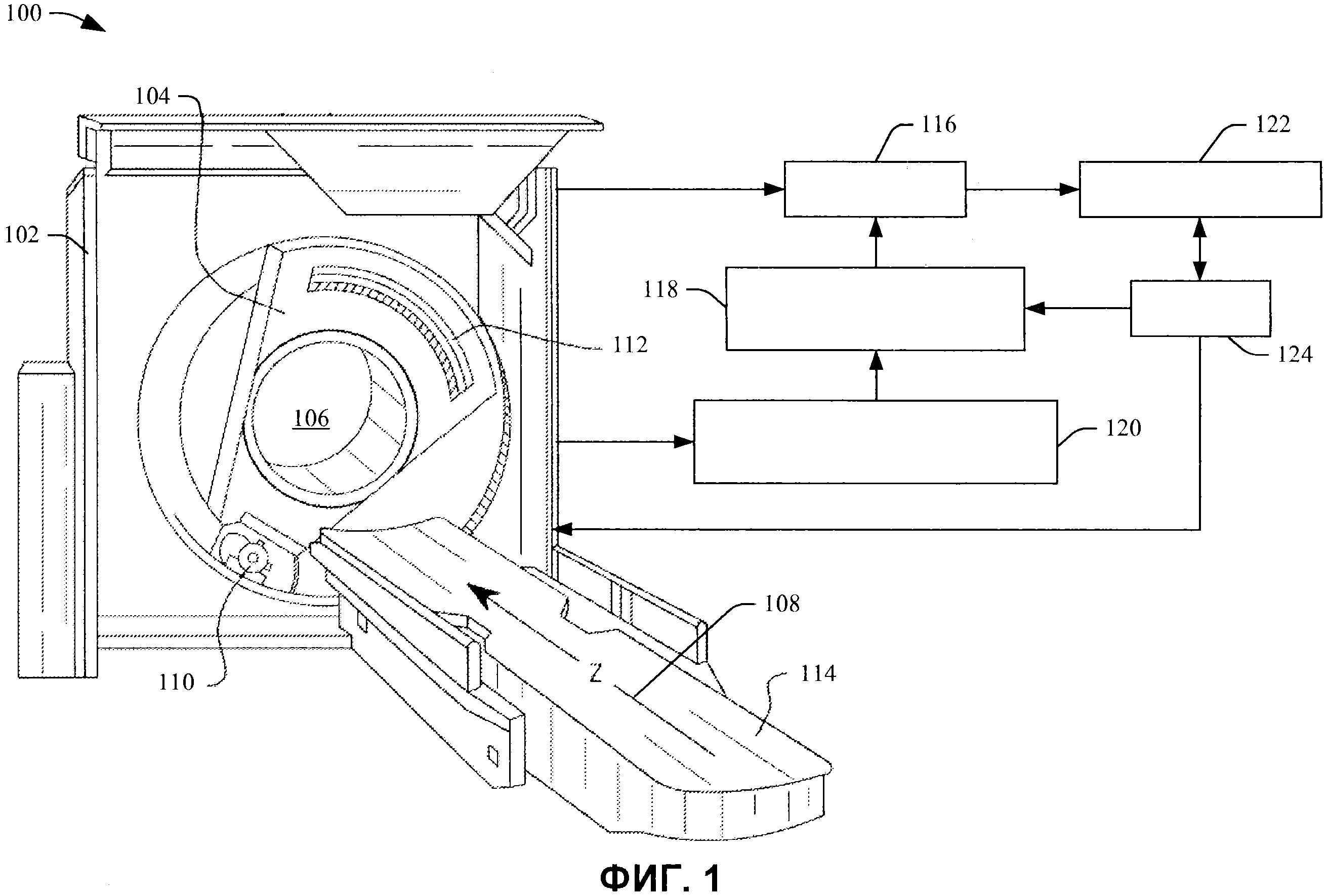
Фигура 1 схематически иллюстрирует систему визуализации в связи с контроллером периодов интегрирования.
Фигура 2 схематически иллюстрирует типовой контроллер периодов интегрирования.
На фигуре 3 показан примерный график временной привязки IP и ошибки IP как функции скорости поворота поворотного гентри.
Фигура 4 схематически иллюстрирует примерную систему визуализации, использующую один датчик и одну метку для способствования определению сигнала временной привязки IP.
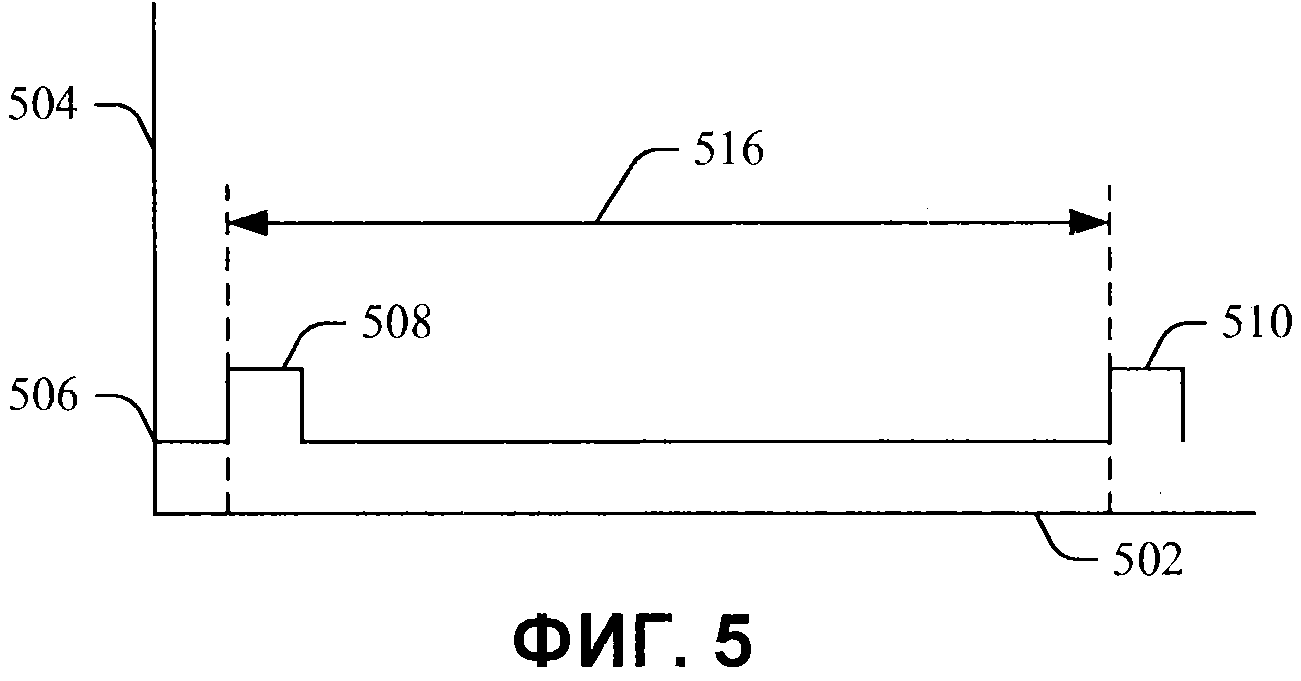
На фигуре 5 показана примерная временная диаграмма датчика с фигуры 4.
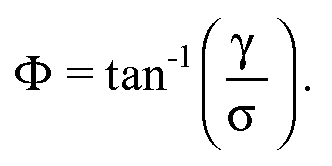
Фигура 6 схематически иллюстрирует примерную систему визуализации, использующую множество датчиков и множество меток для способствования определению сигнала временной привязки IP и его корректировке.
На фигуре 7 показана примерная диаграмма временной привязки для датчиков с фигуры 6.
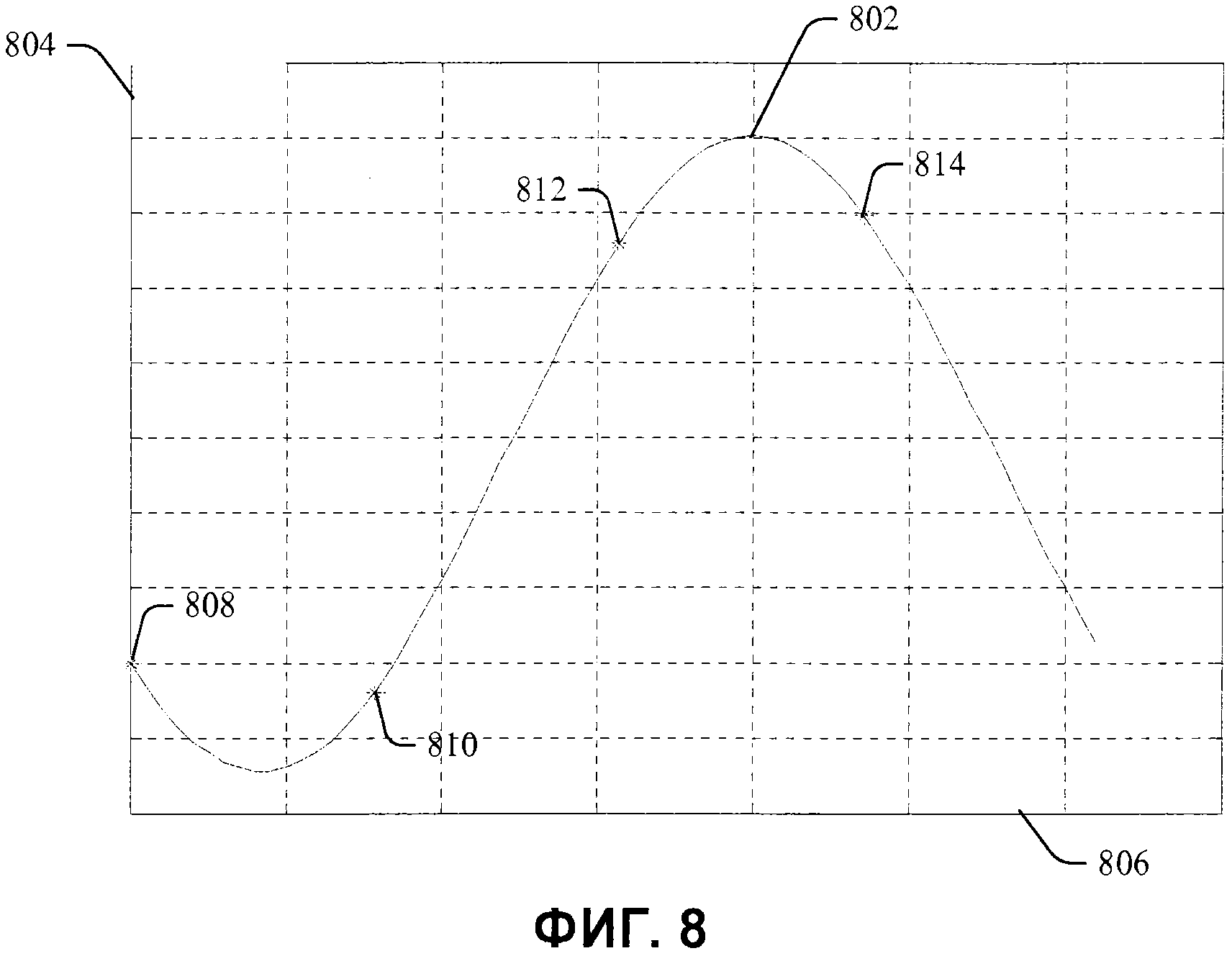
На фигуре 8 показана примерная кривая ошибок, представляющая ошибку IP как функцию углового положения.
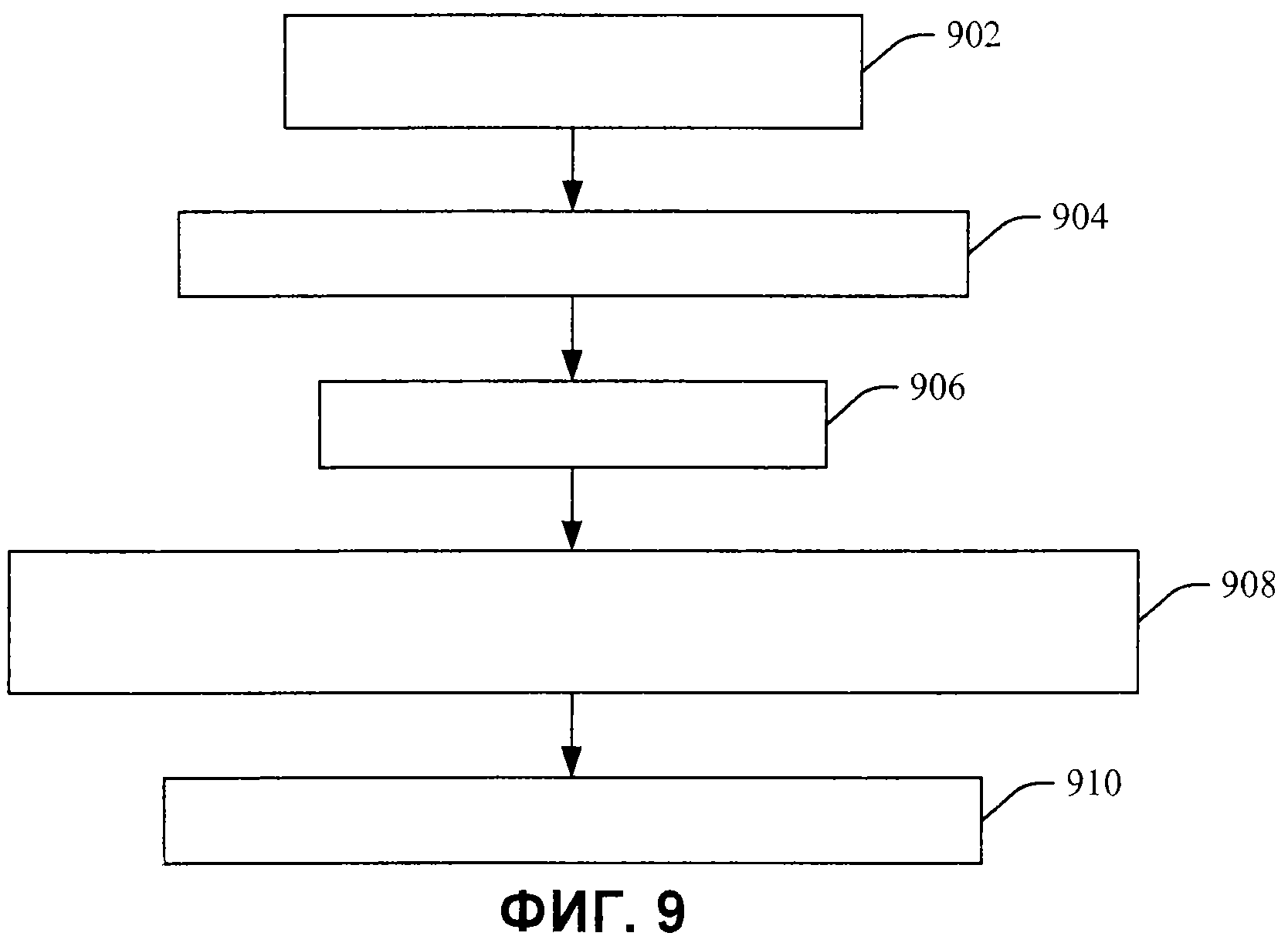
Фигура 9 иллюстрирует примерный способ для определения сигнала временной привязки IP.
Фигура 10 иллюстрирует примерный способ для определения скорректированного с учетом дисбаланса гентри сигнала временной привязки IP.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фигура 1 схематически иллюстрирует систему визуализации, такую как сканер 100 компьютерной томографии (CT). Сканер 100 включает в себя неподвижный гентри 102 и поворотный гентри 104, который удерживается с возможностью поворота неподвижным гентри 102. Поворотный гентри 104 поворачивается вокруг области исследования 106 вокруг продольной или z-оси 108 один или более раз в течение одного или более циклов получения данных. Опора 114 пациента, такая как кушетка, поддерживает пациента в области исследования 106.
Источник 110 излучения, такой как рентгеновская трубка, поддерживается поворотным гентри 104 и поворачивается вместе с ней вокруг области исследования 106. Источник 110 излучения испускает излучение, которое коллимируется коллиматором источника с целью выдачи, как правило, веерообразного, клиновидного или конического пучка излучения, который проходит через область исследования 106. Матрица 112 чувствительных к излучению детекторов включает в себя одно- или двумерную матрицу пикселей детекторов, которые, соответственно, обнаруживают излучение, которое проходит через область исследования 106, и генерируют электрические сигналы (например, ток или напряжение), указывающие на обнаруженное излучение.
Интегратор 116, который включает в себя один или более субинтеграторов, таких как субинтегратор для каждого пикселя детектора матрицы детекторов, интегрирует электрические сигналы от множества пикселей детекторов, соответственно, для множества периодов интегрирования (видов, проекций и т.д.), при этом каждый период интегрирования соответствует различному диапазону угловых положений при обороте поворотного гентри 104, для одного или более оборотов поворотного гентри 104 во время получения данных, и выдает данные проекции.
Контроллер 118 периодов интегрирования (IP) управляет интегратором 116. В качестве примера, проиллюстрированный контроллер IP 118 инициирует перезапуск интегратора 116 в начале каждого периода интегрирования наряду с передачей произвольного интегрированного сигнала для предыдущего периода интегрирования.
Как подробнее описано ниже, контроллер IP 118 определяет, когда перезапустить интегратор 116, и выдает сигнал, который перезапускает интегратор 116 на основании информации о предыдущем обороте поворотного гентри 104, полученной до (например, при предварительном сканировании) и/или во время сканирования. В проиллюстрированном варианте осуществления, определитель 120 информации оборота гентри определяет такую информацию. В одном из случаев определенная информация оборота гентри позволяет осуществить синхронизацию временной привязки периодов интегрирования (IP) (то есть, интегратор перезапускается) с диапазоном угловых положений поворотного гентри 104 с корректированием и/или без корректирования сигналов временной привязки IP из-за дисбаланса поворотного гентри.
Следует понимать, что такая синхронизация может быть достигнута без использования дополнительного устройства определения положения поворотного гентри. Таким образом, контроллер IP 118 может способствовать сохранению или снижению общей стоимости сканера, например, посредством избегания включения высокоточного устройства определения положения поворотного гентри в систему визуализации 100, при этом достигая предварительно заданного качества изображения (например, заданного пространственного разрешения и/или избегания внесения артефактов, вызываемого неточностями временной привязки) относительно конфигурации, в которой контроллер IP 118 не используется. Естественно, также может быть использовано устройство определения положения поворотного гентри.
Реконструктор 122 восстанавливает данные проекции и генерирует объемные данные изображения, показывающие область исследования 106. Вычислительная система общего назначения служит в качестве консоли 124 оператора, и включает в себя устройство вывода, такое как дисплей, и устройство ввода, такое как клавиатура, мышь и/или т.п. Программное обеспечение, имеющееся в консоли 124, позволяет оператору управлять функционированием системы 100, например, позволяя оператору начать сканирование и т.д.
Несмотря на то, что интегратор 116 и контроллер IP 118 показаны как блоки, отдельные от матрицы детекторов 112, следует понимать, что один или более элементов из интегратора 116 или контроллера IP 118 могут являться частью матрицы детекторов 112. Кроме того, определитель 120 информации оборота гентри может быть частью поворотного и/или стационарного гентри 104 и 102.
Более того, следует понимать, что по меньшей мере субчасть контроллера IP 118 может быть реализована через один или более процессоров, выполняющих читаемые компьютером инструкции, закодированные на машиночитаемом носителе информации.
Дополнительно или альтернативно, одна или более читаемых компьютером инструкций могут переноситься сигналом, несущей волной и т.п.
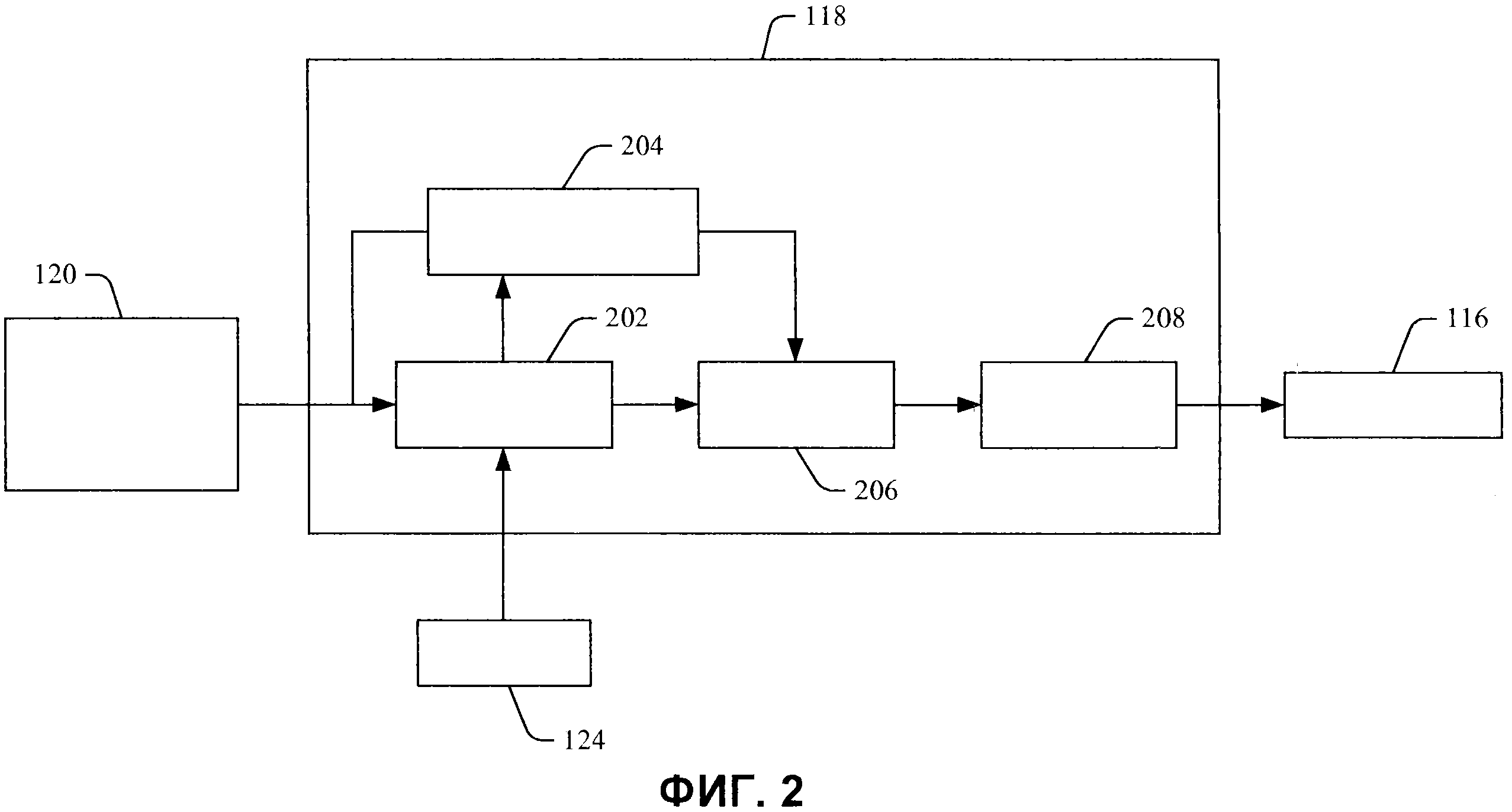
Фигура 2 иллюстрирует пример контроллера IP 118 в связи с определителем 120 информации оборота гентри, консолью 124 и интегратором 116.
Определитель 120 информации оборота гентри определяет информацию временной привязки о вращении поворотного гентри 104. Обычно соответствующий определитель 120 информации оборота гентри может содержать один или более датчиков, прикрепленных к поворотному гентри 104 (или неподвижному гентри 102) и одну или более меток, прикрепленных к неподвижному гентри 102 (или поворотному гентри 104), при этом датчик(-и) и метка(-и) расположены таким образом, что между ними имеет место относительное перемещение, когда поворотный гентри 104 поворачивается, и датчик обнаруживает метку, проходящую в процессе поворота через датчик, и генерирует сигнал, указывающий на обнаруженную метку. Таймер и т.п. может быть использован для определения объема времени между обнаружением меток для одного или более датчиков. Неограничивающий пример реализации подробнее описан ниже.
Предсказатель 202 временной привязки IP предсказывает сигнал временной привязки IP для конкретного сканирования. В проиллюстрированном варианте осуществления предсказатель 202 временной привязки IP предсказывает сигнал временной привязки IP для оборота на основании информации оборота гентри для предыдущего оборота и информации, указывающей скорость поворота поворотного гентри 104, и количества периодов интегрирования (IP) для представляющего интерес протокола сканирования. В качестве примера, в одном из случаев предсказатель 202 временной привязки IP делит объем времени для предыдущего оборота на скорость поворота и количество IP для вычисления сигнала временной привязки IP, указывающего на множество IP, находящихся на равном угловом расстоянии друг от друга. Подходящая временная продолжительность или ширина IP включает, но не ограничивается, ширину временного интервала в диапазоне от около пятидесяти микросекунд (50 мкс) до около пятисот микросекунд (500 мкс). Естественно, в настоящем описании предусматриваются и другие значения ширины временного интервала IP.
В проиллюстрированном варианте осуществления предсказатель 202 временной привязки IP может получать скорость поворота гентри и количество IP с консоли 124. Если сканер 100 включает в себя протоколы с одними и теми же скоростью поворота гентри и количеством IP, то скорость поворота гентри и количество IP может дополнительно или альтернативно храниться в памяти контроллера IP 118 и/или быть доступными ему. В другом варианте осуществления контроллер IP 118 дополнительно или альтернативно хранит и/или может иметь доступ к памяти, в которой хранится соответствие (например, справочная таблица (LUT)) между конкретными протоколами сканирования и скоростью поворота гентри и количеством IP для каждого протокола сканирования, и использует соответствие для определения поворота гентри и количества IP для идентифицированного протокола, например, в информации из консоли 124 и/или другого компонента.
Определитель 204 ошибки временной привязки IP генерирует сигнал ошибки IP, показывающий колебания скорости поворота поворотного гентри 104, например, вследствие дисбаланса поворотного гентри 104 и/или по другой причине, которые могут привести к неточности временной привязки между предсказанным сигналом временной привязки IP и фактическим диапазоном угловых положений поворотного гентри 104. В проиллюстрированном варианте осуществления определитель 204 ошибки временной привязки IP генерирует сигнал ошибки на основании информации от определителя 120 информации оборота гентри и/или предсказателя 202 временной привязки IP. В одном из случаев определитель 204 ошибки временной привязки IP определяет разницу между предсказанной временной привязкой IP и измеренными фактическими IP для подмножества угловых положений, определяет значения ошибок на основании разностей, и использует значения ошибок для генерации корректировки для предсказанного сигнала IP. Типовая реализация определителя 204 ошибки временной привязки IP подробнее описана ниже.
Корректор 206 временной привязки IP корректирует предсказанный сигнал временной привязки IP от предсказателя 202 временной привязки IP на основании сигнала ошибки временной привязки IP от определителя 204 ошибки временной привязки IP. В одном неограничивающем варианте осуществления корректор 206 временной привязки IP может просто суммировать или объединять другим способом сигнал временной привязки IP и сигнал ошибки временной привязки IP.
Генератор 208 импульсов IP генерирует импульсы перезапуска интегратора на основании скорректированного сигнала временной привязки IP, который перезапускает интегратор 116 для каждого периода интегрирования для каждого поворота поворотного гентри 104 во время сканирования. В проиллюстрированном варианте осуществления генератор 208 импульсов IP генерирует поток последовательных импульсов, который инициирует передачу данных от интегратора 116 или перезапускает его. На выходе интегратора 116 выдаются данные проекции, которые восстанавливаются реконструктором 122, как обсуждалось выше.
Также предусматриваются вариации.
Если ошибка IP находится в пределах предварительно определенного диапазона (например, пятьдесят (50) угловых секунд или менее), то определитель 204 ошибки временной привязки IP и корректор 206 временной привязки IP может быть исключен или может не использоваться. В этом случае предсказанный сигнал временной привязки от предсказателя 202 временной привязки IP выдается и используется генератором 208 импульсов IP для выдачи импульсов перезапуска интегратора.
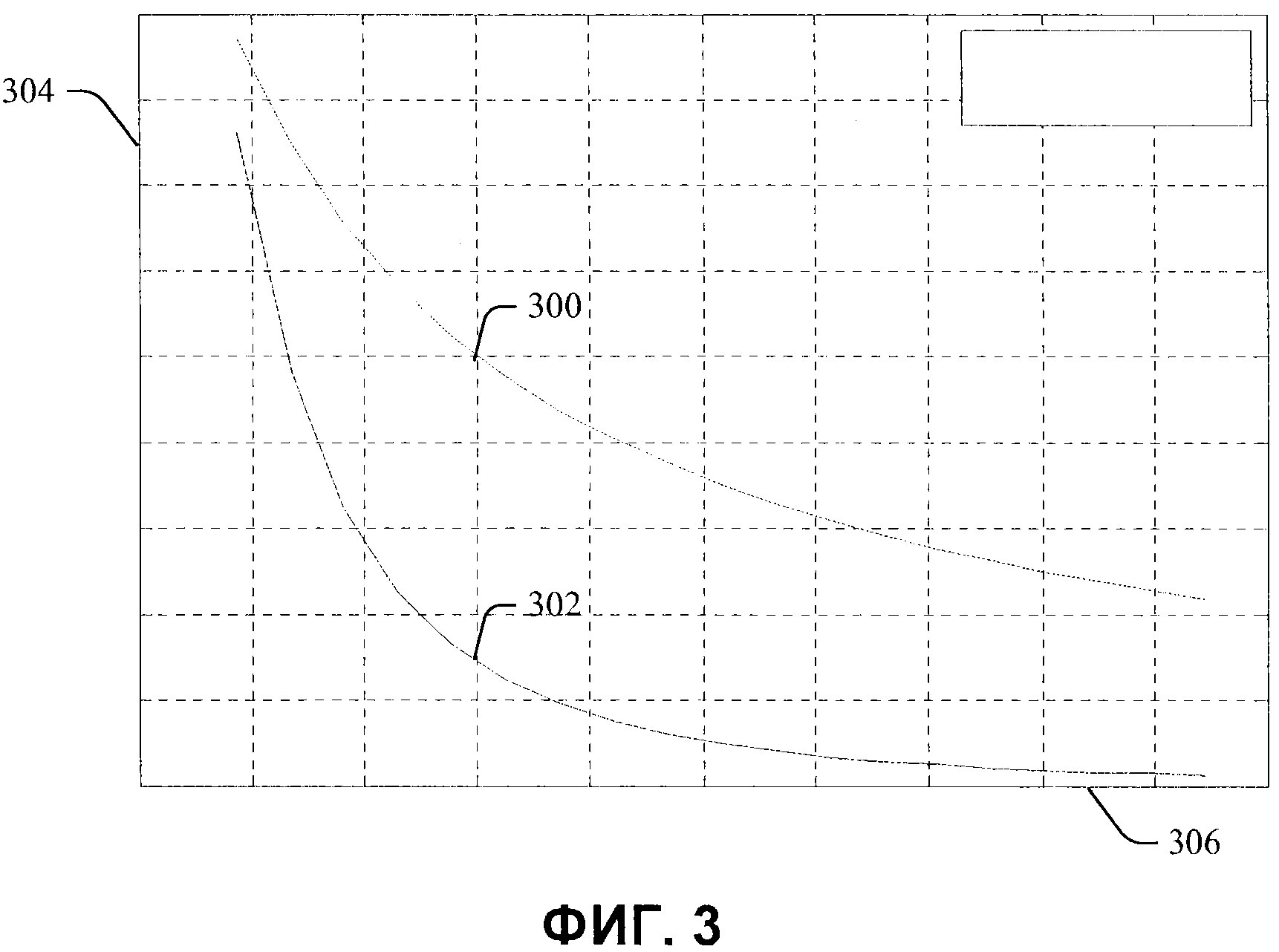
На фигуре 3 показаны примеры кривой 300 временной привязки IP и кривой 302 ошибок IP как функции скорости поворота поворотного гентри 104, в которых y-ось 304 представляет собой ширину временного интервала IP, и x-ось 306 представляет собой скорость поворота поворотного гентри. Как показано на фигуре 3, временная привязка IP и ошибка IP снижается с возрастанием скорости поворота поворотного гентри. Таким образом, определитель 204 ошибки временной привязки IP и корректор 206 временной привязки IP могут использоваться, не включаться или не использоваться при более высоких скоростях поворота, и могут использоваться при более низких скоростях поворота для корректирования ошибки IP.
В другой вариации значения ошибок IP для сканера определяются заранее, например, во время калибровки или другой процедуры, и хранятся в таблице, такой как справочная таблица (LUT), со сканером. В данном случае LUT может использоваться корректором 206 временной привязки IP для корректировки сигнала временной привязки IP от предсказателя 202 временной привязки IP.
В другой вариации, адаптивный алгоритм вычисления ошибки может использоваться для нестационарных ошибок. Это было бы полезным, например, если в системе возникает непредсказанное нарушение, такое как меняющийся дисбаланс или поправки крутящего момента двигателя во время получения.
В другой вариации, стандартный кодировщик двигателя может быть использован для осуществления движения поворотного гентри с постоянной скоростью, что может скомпенсировать или снизить крутящий момент дисбаланса, что может привести к снижению ошибки временной привязки IP.
В другой вариации, один цикл на амплитуду оборота и фазу тока мотора может быть использован для измерения неточности IP и улучшения временной привязки IP аналогично и, возможно, совместно с дополнительными датчиками положения, как описано выше. Крутящий момент может быть использован после выполнения получения данных для улучшения временной привязки.
Фигуры 4 и 5 иллюстрируют неограничивающий пример, в котором определитель 204 ошибки временной привязки IP и корректор 206 временной привязки IP опускаются или не используются.
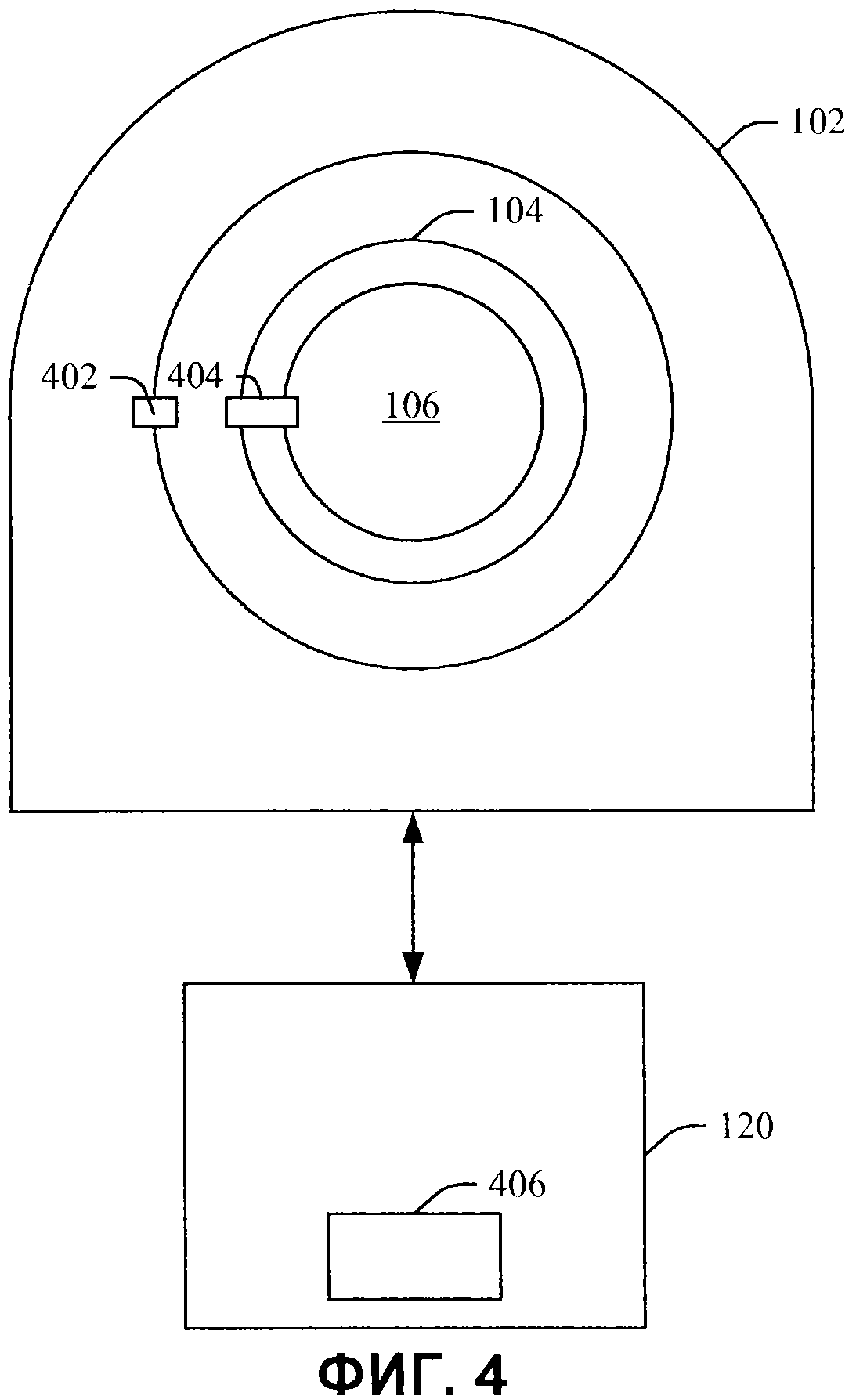
Обратимся сначала к фигуре 4; датчик 402 прикреплен к поворотному гентри 104, и метка 404 прикреплена к неподвижному гентри 102. Датчик 402 и метка 404 размещены друг относительно друга таким образом, что датчик 402 проходит в процессе поворота через метку 404 при каждом обороте поворотного гентри 104. Датчик 402 сконфигурирован для обнаружения метки 404 при повороте датчика 402 с прохождением метки 404, и для генерации выходного сигнала, указывающего на эту метку.
На фигуре 5 показан пример выхода датчика 402. На фигуре 5 x-ось 502 представляет собой время, и y-ось 504 представляет собой выход датчика 402. Выходной сигнал 506 представляет собой выход датчика 402. В отношении выходного сигнала 506, первый выходной импульс 508 соответствует прохождению датчика 402 через метку 404 для оборота, и второй выходной импульс 510 соответствует прохождению датчика 402 через метку 404 для следующего оборота.
Продолжим рассмотрение фигур 4 и 5; определитель 120 информации оборота гентри включает в себя таймер 406. В данном примере таймер 406 перезапускается и начинает отсчет времени оборота на нарастающем фронте импульса 508. На нарастающем фронте следующего импульса 510, таймер 406 выдает сигнал 516 времени, который показывает время оборота, предсказателю 202 временной привязки IP, и таймер 406 перезапускается и начинает отсчет времени следующего оборота.
Предсказатель 202 временной привязки IP определяет сигнал временной привязки IP для следующего оборота, как описано выше, например, посредством деления сигнала 516 времени на количество IP и скорость поворота поворотного гентри 104 для следующего оборота, которые могут быть получены с консоли 124 или другим способом. Сигнал временной привязки IP выдается генератору 208 импульсов IP, который использует сигнал временной привязки IP для генерации импульсов перезапуска интегратора 116 для оборота.
Неограничивающая реализация может включать в себя счетчик, который инициируется выходным сигналом датчика 402 и который определяет временную продолжительность оборота, триггер-защелку, которая также инициируется выходом датчика 402 и в которой задерживается сигнал временной привязки IP (который рассчитывается путем деления временной продолжительности на произведение количества IP и скорости поворота), и таймер, который выдает поток последовательных импульсов инициации на основании сигнала временной привязки IP. Сумматор может быть подсоединен до таймера с целью добавления сигнала корректировки ошибки IP к сигналу временной привязки IP.
Фигуры 6 и 7 иллюстрируют неограничивающий пример, в котором определитель 204 ошибки временной привязки IP и корректор 206 временной привязки IP используются для корректировки предсказанного сигнала временной привязки IP. Вспомним, что при более низких скоростях поворота может иметься необходимость корректировки предсказанного сигнала временной привязки IP относительно, например, вариаций в угловом положении вследствие дисбаланса гентри и/или по другим причинам.
Обратимся сначала к фигуре 6; по меньшей мере первый датчик 602 и второй датчик 604 прикреплены к поворотному гентри 104, и по меньшей мере первая метка 606 и вторая метка 608 прикреплены к неподвижному гентри 102 (или поворотному гентри 104). По меньшей мере две метки 606 и 608 имеют угловое смещение друг относительно друга на угловое расстояние (α) 610. В проиллюстрированном варианте осуществления α составляет около 90 градусов. По меньшей мере два датчика 602 и 604 имеют угловое смещение друг относительно друга на угловое расстояние (β) 612. В проиллюстрированном варианте осуществления β составляет около ста восьмидесяти градусов.
Следует понимать, что проиллюстрированный вариант осуществления не является ограничивающим. В других вариантах осуществления может присутствовать больше или меньше датчиков и/или меток, и расположение датчиков и/или меток друг относительно друга и поворотном и/или неподвижном гентри может быть различным.
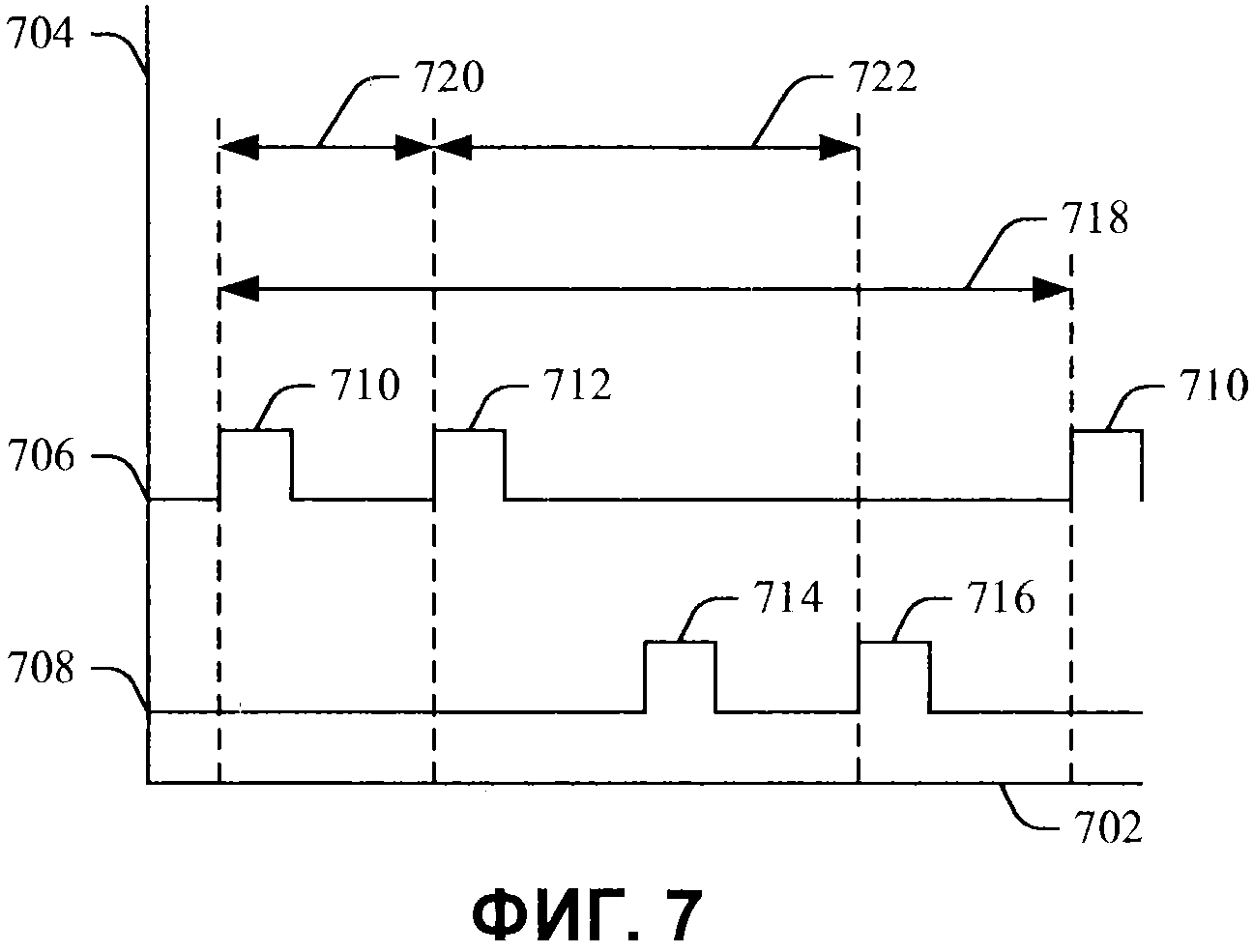
На фигуре 7 показан примерный выходной сигнал датчиков 602 и 604. На фигуре 7 x-ось 702 представляет время, и y-ось 704 представляет выходной сигнал по меньшей мере датчиков 602 и 604. Первый выходной сигнал 706 представляет выход датчика 602 (или датчика 604), и второй выходной сигнал 708 представляет выход датчика 604 (или датчика 602).
В отношении выходного сигнала 706, первый выходной импульс 710 соответствует прохождению первого датчика 602 через первую метку 606, и второй выходной сигнал 712 соответствует прохождению первого датчика 602 через вторую метку 608. В отношении выходного сигнала 708, первый выходной импульс 714 соответствует прохождению второго датчика 604 через первую метку 606, и второй выходной сигнал 716 соответствует прохождению второго датчика 604 через вторую метку 608. Импульс 711 соответствует прохождению первого датчика 602 через первую метку 606 для последующего оборота.
В данном примере, и аналогично примеру с фигур 4-6, таймер 406 используется для определения временной продолжительности 718 оборота на основании разницы во времени между импульсом 710 и импульсом 711. Таймер 406 также может быть использован для определения временного расстояния 720 между метками 606 и 608 на основании разницы во времени между импульсами 710 и импульсом 712, и временного расстояния 722 между датчиками 602 и 604 на основании разницы между импульсами 714 и импульсом 716.
В проиллюстрированном варианте осуществления, метка 606 присваивается опорному угловому положению ноль (0). Угловое расстояние (α) между меткой 606 и меткой 608 может быть определено как отношение временного расстояния 720 между метками 606 и 608 и временного расстояния 718 одного оборота. Угловое расстояние (β) между датчиками 602 и 604 может быть определено как отношение временного расстояния 722 между датчиками 602 и 604 при прохождении метки 608 и временного расстояния 718 одного оборота. Угловое расстояние между датчиком 602 при прохождении метки 606 и датчиком 604 при прохождении метки 608 может быть определено через суммирование угловых расстояний α и β (α+β). Моменты времени α и β можно назвать откалиброванными моментами времени измерений, и они могут быть определены путем измерения времени между метками во время состояния минимального нарушения, которое обычно имеет место при максимальной скорости ротора.
Определитель 204 ошибки временной привязки IP (фигура 2) может определить ошибку IP для предсказанного сигнала временной привязки IP на основании предсказанной временной привязки IP и измеренной временной привязки IP 718-722 для угловых положений 0, α, β и α+β, как показано в уравнении 1:
Уравнение 1:

где Θ представляет собой угловые положения 0, α, β и α+β, T^predicted представляет собой предсказанную временную привязку IP для угловых положений Θ, T^measured представляет собой измеренную временную привязку для угловых положений Θ, I является неизвестным и представляет собой инерциальную амплитуду Mo/Jω3, где Mo представляет собой статический дисбаланс, J представляет собой инерцию ротора вокруг оси поворота z, и ω представляет собой скорость поворота, Φ является неизвестным и представляет собой фазу дисбаланса, и  представляет собой среднее T^ideal - T^measured.
представляет собой среднее T^ideal - T^measured.
С использованием тригонометрического тождества Isin(Θ+Φ)=IcosΦsinΘ+IsinΦcosΘ, и подстановки γ=IcosΦ, σ=IsinΦ, S=sinΘ, C=cosΘ и Y=T^predicted-T^measured-, уравнение 1 может быть переписано как показано в уравнении 2:
Уравнение 2:
где γ и σ являются неизвестными. Умножение уравнения 2 на транспонированную S (то есть, St) и транспонированную С (то есть, Ct), соответственно, дает уравнения 3 и 4:
Уравнение 3:
 и
и
Уравнение 4:
или, два уравнения с двумя неизвестными, что можно решить как систему уравнений. В матричной форме уравнения 3 и 4 могут быть представлены, как показано в уравнениях 5 и 6:
Уравнение 5:
 и
и
Уравнение 6:
которые можно решить относительно γ и σ.
С полученными значениями γ и σ неизвестные I и Φ из уравнения 1 могут быть определены, соответственно, из уравнений 7 и 8:
Уравнение 7:
 и
и
Уравнение 8:
Выше, I представляет собой инерциальную амплитуду Mo/Jω3, где Mo представляет собой статический дисбаланс, J представляет собой инерцию ротора вокруг оси поворота z, и ω представляет собой скорость поворота, и может быть использована для определения ошибки IP, как показано в уравнении 9:
Уравнение 9:

На фигуре 8 показана кривая 802 ошибок, представляющая ошибку IP как функцию углового положения, при этом y-ось 804 представляет величину ошибки (или отклонение от фактического углового положения), и x-ось 806 представляет угловое положение. Точки 808, 810, 812 и 814 соответствуют угловым положениям θ (или 0, α, β и α+β). Кривая 802 ошибок подгоняется по точкам 808, 810, 812 и 814. В точке 808, исходном угловом положении IP для оборота, ошибка углового положения IP равна нулю (0). Ошибка в заданном угловом диапазоне может быть определена по отклонению в ошибке относительно значения в точке 808.
Определитель 204 ошибки временной привязки IP выдает кривую ошибок временной привязки IP корректору 206 временной привязки IP, который использует кривую ошибок временной привязки IP для корректировки предсказанного сигнала временной привязки IP, предсказанного предсказателем 202 временной привязки IP. В качестве примера, в одном неограничивающем случае, корректор 206 временной привязки IP прибавляет кривую ошибок временной привязки IP к сигналу временной привязки IP, в результате чего происходит сдвиг временной привязки IP таким образом, что IP синхронизируются с угловым положением поворотного гентри.
Следует понимать, что использование дополнительных датчиков и/или меток может улучшить оценку ошибки дисбаланса. Например, использование дополнительных датчиков и/или меток может снизить шум. В зависимости от количества датчиков и/или меток, контроллер IP 118 может функционировать, по существу, аналогично кодировщику с высоким разрешением.
Фигура 9 иллюстрирует примерный способ для определения сигнала временной привязки IP.
Следует понимать, что порядок действий в способах, описанных в настоящем описании, не является ограничивающим. Таким образом, в настоящем описании предусматриваются и другие порядки. Кроме того, одно или более действий может быть пропущено и/или может быть включено одно или более дополнительных действий.
На этапе 902 определяется временная продолжительность оборота поворотного гентри 104. Как описано в настоящем описании, этого можно достичь посредством датчика, метки и таймера.
На этапе 904 получают количество IP для одного или более последовательных оборотов.
На этапе 906 получают скорость поворота поворотного гентри для одного или более последовательных оборотов.
На этапе 908 сигнал временной привязки IP для одного или более последовательных оборотов определяется путем деления времени оборота на произведение количества IP и скорости поворота поворотного гентри.
На этапе 910 сигнал временной привязки IP используется во время получения данных для определения IP во время по меньшей мере одного или более последовательных оборотов.
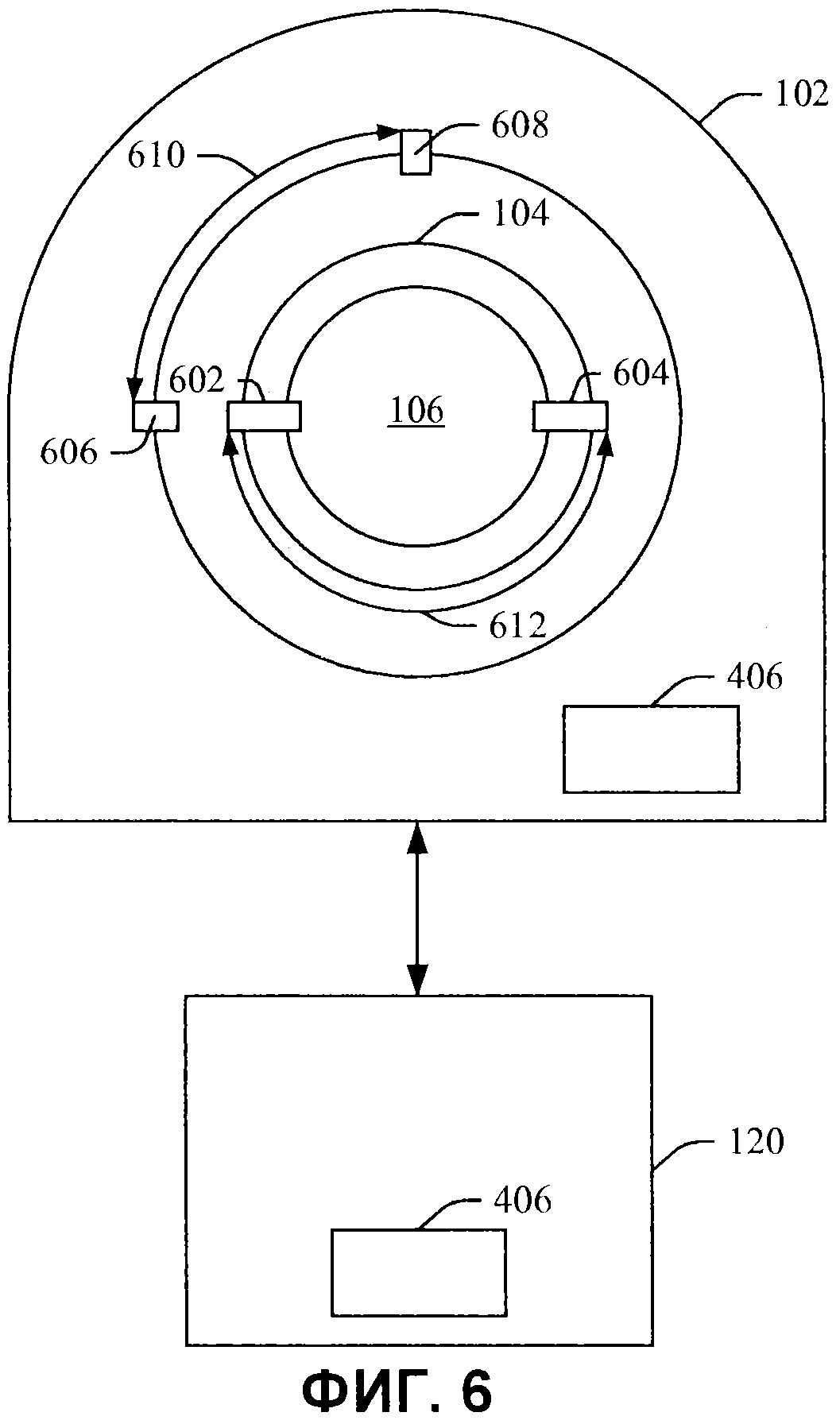
Фигура 10 иллюстрирует примерный способ для определения скорректированного сигнала временной привязки IP.
Следует понимать, что порядок действий в способах, описанных в настоящем описании, не является ограничивающим. Таким образом, в настоящем описании предусматриваются и другие порядки. Кроме того, одно или более действий может быть пропущено и/или может быть включено одно или более дополнительных действий.
На этапе 1002 определяется первая временная продолжительность оборота поворотного гентри 104, в соответствии с описанным в настоящем описании.
На этапе 1004 определяется по меньшей мере вторая временная продолжительность от начального углового положения оборота до по меньшей мере первого опорного углового положения, которое находится на расстоянии, меньшем полного оборота (2π) от начального углового положения. Как описано в настоящем описании, этого можно достичь через использование датчика, метки и таймера.
На этапе 1006 предсказывается временная привязка IP для опорного углового положения.
На этапе 1008 измеряется временная привязка IP для опорного углового положения.
На этапе 1010 определяется ошибка временной привязки IP на основании различия между предсказанным и измеренным угловыми положениями.
На этапе 1012 генерируется сигнал ошибки IP путем подгонки значений ошибок в начальном угловом положении и по меньшей мере первом опорном угловом положении, кривой, охватывающей оборот.
На этапе 1014 сигнал временной привязки IP для одного или более последовательных оборотов определяется на основании первой временной продолжительности, количества IP и скорости поворота для последующего оборота.
На этапе 1016 сигнал временной привязки IP корректируется на основании сигнала ошибки IP. Как описано в настоящем описании, этого можно достичь путем суммирования сигналов.
На этапе 1018 скорректированный сигнал временной привязки IP используется во время получения данных для определения IP во время по меньшей мере одного или более последовательных оборотов.
Описанное выше может быть реализовано посредством машиночитаемых инструкций, которые при выполнении процессором(-ами) компьютера вызывают исполнение процессором(-ами) описанных действий. В этом случае инструкции хранятся на машиночитаемом носителе информации, ассоциированном с соответствующим компьютером или доступным с него.
Изобретение в настоящей заявке было описано со ссылкой на различные варианты осуществления. Модификации и изменения могут быть понятны другим после прочтения представленного описания. Предполагается, что изобретение ограничивается как включающее в себя все такие модификации и изменения в той степени, в которой они находятся в пределах объема прилагаемых пунктов формулы изобретения и их эквивалентов.
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Электронный планировщик с функцией управления весом
Режущий элемент, электрическая бритва, оснащенная режущим элементом, и способ получения такого элемента
Компактная оптическая система и линзы для формирования равномерного коллимированного света
Одночастотная сеть
Система и способ для управления освещением
Способ, система и пользовательский интерфейс для автоматического создания атмосферы, в частности освещенной атмосферы, на основании ввода ключевого слова
Определение пространственного распределения отдачи сцинтиллятора
Способ и устройство для регистрирования сосудистой структуры во время медицинского воздействия
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

