Результат интеллектуальной деятельности: БЫСТРАЯ ПАРАЛЛЕЛЬНАЯ РЕКОНСТРУКЦИЯ ДЛЯ ПРОИЗВОЛЬНЫХ ТРАЕКТОРИЙ К-ПРОСТРАНСТВА
Вид РИД
Изобретение
Нижеследующее относится к области техники магнитно-резонансной томографии, области техники медицинской визуализации и родственным областям техники.
Магнитно-резонансная (МР) томография представляет собой известный метод медицинской визуализации, который также используется в ветеринарной визуализации и других применениях визуализации, таких как описание археологических артефактов. МР-томография обладает рядом преимуществ над другими методами визуализации, таких как не использование ионизирующего излучения и предоставление различных режимов анатомического и функционального контраста. В функциональной магнитно-резонансной томографии (фМРТ) используется режим контраста, который обнаруживает функциональные аспекты. Например, при фМРТ головного мозга используется режим контраста, такой как BOLD (зависимый от уровня кислорода в крови), который обеспечивает контраст, косвенно связанный с нейронной активностью. При магнитно-резонансной ангиографии (МРА) используется метод, который обеспечивает контраст крови. В некоторых подходах МРА вводят экзогенное магнитное контрастное вещество в кровоток.
Эти различные методы динамической МР-томографии накладывают строгие временные ограничения на время сбора данных изображения. Также быстрая МР-томография полезна по другим причинам, таким как уменьшение артефактов движения и повышение эффективности лабораторий МРТ. С этой целью разрабатывали методы быстрой МР-томографии, такие как методы ультракороткого времени эхо (UTE). Тем не менее, визуализация все еще может занимать от порядка нескольких минут до десятков минут или больше.
Другим подходом для достижения более быстрого сбора МР-томографических данных является класс методов визуализации, известный как частично параллельная визуализация (PPI). Примеры методов PPI включают кодирование чувствительности (SENSE), одновременный сбор данных о пространственных гармониках (SMASH), обобщенный частично параллельный сбор данных с автокалибровкой (GRAPPA) или тому подобное. В данных методах множество радиочастотных приемных катушек с различными чувствительностями катушек собирает набор МР-томографических данных с неполной выборкой, то есть пропуская некоторые данные (например, опуская сбор данных некоторых строк фазового кодирования, как делается в SENSE). Недостающие данные компенсируют посредством дополнительной информации, получаемой посредством использования множества приемных катушек с различными чувствительностями катушек, с применением подходящего метода реконструкции (например, метода реконструкции SENSE или SMASH). Неполнота выборки получаемого набора данных PPI соответствует коэффициенту ускорения сбора данных визуализации (как правило, обозначаемому R), величина которого зависит от степени неполноты выборки. В общем, набор данных с более неполной выборкой можно получать быстрее, но с возможной расплатой в виде появления артефактов изображения, обусловленных неполнотой выборки.
Ниже предложены новые и улучшенные устройства и способы, раскрытые в настоящем описании.
В соответствии с одним раскрытым аспектом способ включает в себя получение набора данных магнитно-резонансной частично параллельной визуализации (MR-PPI) с неполной выборкой с применением множества радиочастотных приемных катушек и реконструирование набора данных MR-PPI с неполной выборкой, чтобы сформировать реконструированное магнитно-резонансное (МР) изображение. Реконструирование включает в себя: (i) применение оператора обобщенного частично параллельного сбора данных с автокалибровкой (GRAPPA) или прямой свертки, чтобы восполнить по меньшей мере некоторые недостающие данные набора данных MR-PPI с неполной выборкой таким образом, чтобы сформировать увеличенный набор данных, содержащий набор данных MR-PPI с неполной выборкой и недостающие данные, которые восполнены посредством операции (i); и (ii) применение алгоритма, отличного от оператора GRAPPA и отличного от прямой свертки, чтобы реконструировать увеличенный набор данных, или чтобы реконструировать набор данных MR-PPI с неполной выборкой с применением увеличенного набора данных в качестве набора инициализационных данных для итеративного алгоритма реконструкции.
В соответствии с другими раскрытыми аспектами в способе, изложенном в предыдущем абзаце, получение данных включает в себя получение набора данных MR-PPI с неполной выборкой, включающего в себя центральную область k-пространства, включая k=0, выборка которой не является неполной, промежуточную область k-пространства, окружающую центральную область k-пространства, выборка которой является неполной с первым коэффициентом ускорения R1, и внешнюю область k-пространства, окружающую промежуточную область k-пространства, выборка которой является неполной со вторым коэффициентом ускорения R2, где R2>R1. Выполнение операции (i) может предшествовать выполнению операции (ii). В другом способе, как изложено в предыдущем абзаце, получение данных включает в себя получение набора данных k-t MR-PPI с неполной выборкой за множество временных кадров, включающего в себя центральную область k-пространства, включая k=0, выборка которой не является неполной, промежуточную область k-пространства, окружающую центральную область k-пространства, выборка которой является неполной с первым коэффициентом ускорения R1, и внешнюю область k-пространства, окружающую промежуточную область k-пространства, выборка которой является неполной со вторым коэффициентом ускорения R2, где R2>R1.
В соответствии с другим раскрытым аспектом способ включает в себя получение набора недекартовых данных магнитно-резонансной частично параллельной визуализации (MR-PPI) с неполной выборкой с применением множества радиочастотных приемных катушек и реконструирование набора недекартовых данных MR-PPI с неполной выборкой, чтобы сформировать реконструированное магнитно-резонансное (МР) изображение, причем реконструирование использует оператор обобщенного частично параллельного сбора данных с автокалибровкой (GRAPPA) для более широких радиальных полос (GROWL), чтобы восполнить по меньшей мере некоторые недостающие данные набора недекартовых данных MR-PPI с неполной выборкой.
В соответствии с другими раскрытыми аспектами в способе, изложенном в предыдущем абзаце, получение данных включает в себя получение набора недекартовых данных k-t MR-PPI с неполной выборкой за множество временных кадров, причем неполная выборка различается в соседних временных кадрах для получения неполной выборки по временному измерению, и реконструирование использует GROWL, чтобы восполнить по меньшей мере некоторые недостающие данные из-за неполной выборки по временному измерению.
В соответствии с другим раскрытым аспектом все способы, изложенные в предыдущих четырех абзацах, могут дополнительно включать в себя отображение реконструированного МР-изображения на устройстве отображения. В соответствии с другим раскрытым аспектом устройство содержит магнитно-резонансный (МР) сканер, множество радиочастотных приемных катушек и устройство обработки данных, выполненное с возможностью взаимодействия с МР-сканером и радиочастотными приемными катушками для осуществления одного или более способов, изложенных в предыдущих четырех абзацах. В соответствии с другим раскрытым аспектом носитель для хранения хранит команды, выполняемые магнитно-резонансной (МР) системой визуализации для осуществления одного или более способов, изложенных в предыдущих четырех абзацах.
Одно преимущество заключается в обеспечении магнитно-резонансной частично параллельной визуализации (MR-PPI) с уменьшенными артефактами изображения.
Другое преимущество заключается в обеспечении MR-PPI с увеличенным общим коэффициентом ускорения, соответствующим более быстрому получению набора данных.
Дополнительные преимущества будут ясны специалистам в данной области техники после прочтения и понимания нижеследующего подробного описания.
Фиг.1 схематически показывает систему визуализации, выполненную с возможностью осуществления магнитно-резонансной частично параллельной визуализации (MR-PPI), как раскрыто в настоящем описании.
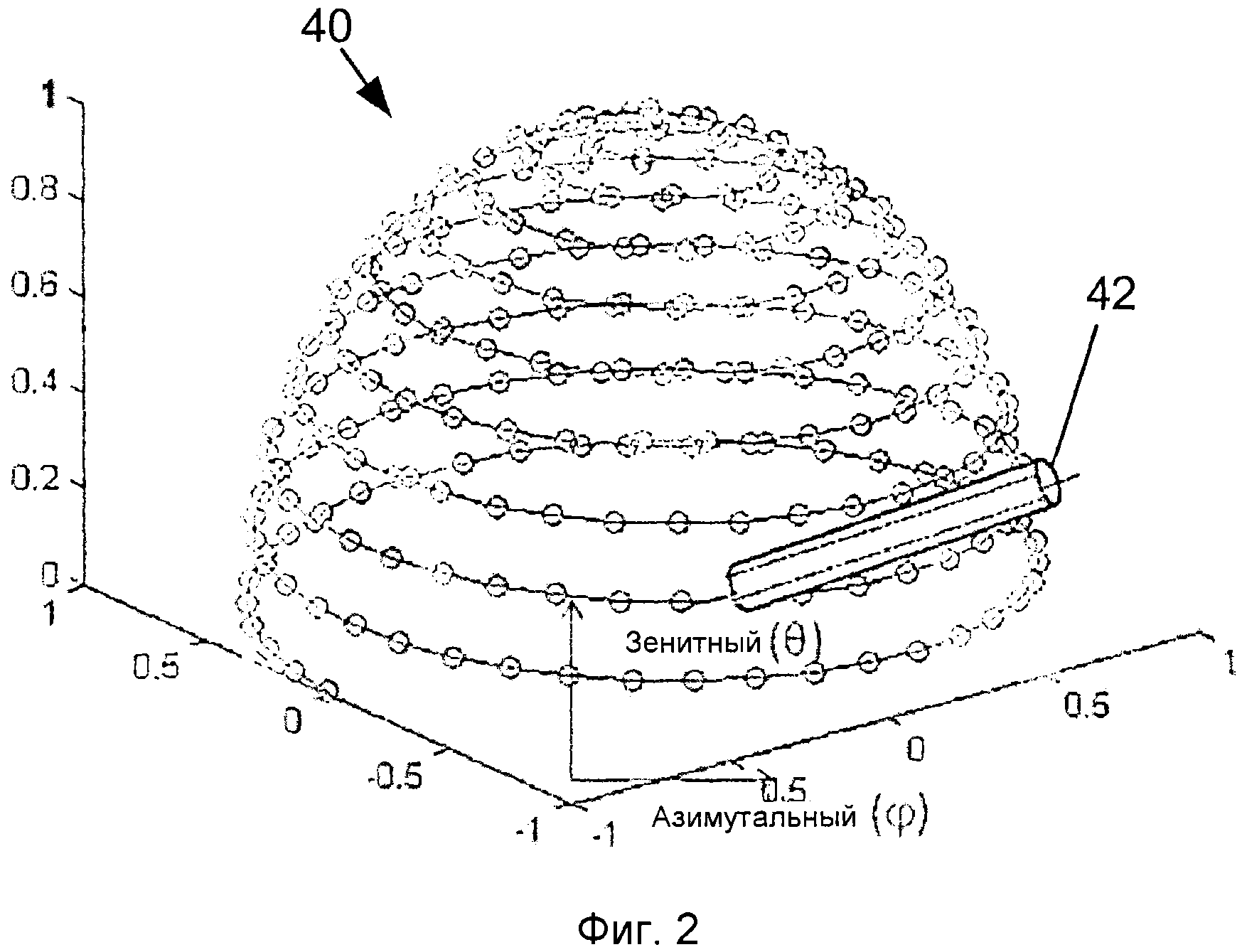
Фиг.2 схематически показывает радиальный набор данных MR-PPI, соответствующим образом получаемый системой визуализации по Фиг.1 и обрабатываемый управляющим модулем по Фиг.1 с целью применения GROWL к радиальному набору данных MR-PPI.
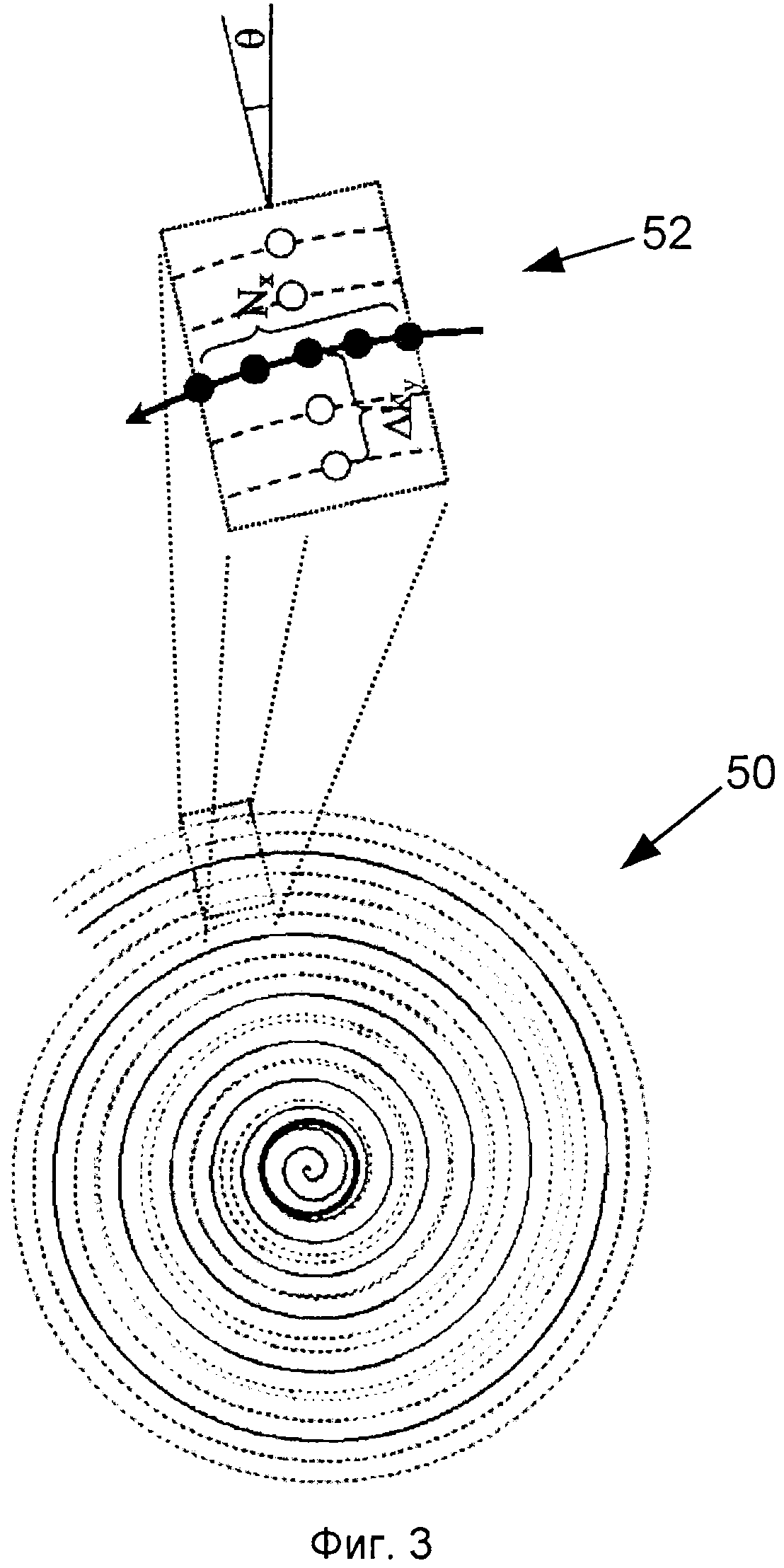
Фиг.3 схематически показывает спиральный набор данных MR-PPI, соответствующим образом получаемый системой визуализации по Фиг.1 и обрабатываемый управляющим модулем по Фиг.1 с целью применения GROWL к спиральному набору данных MR-PPI.
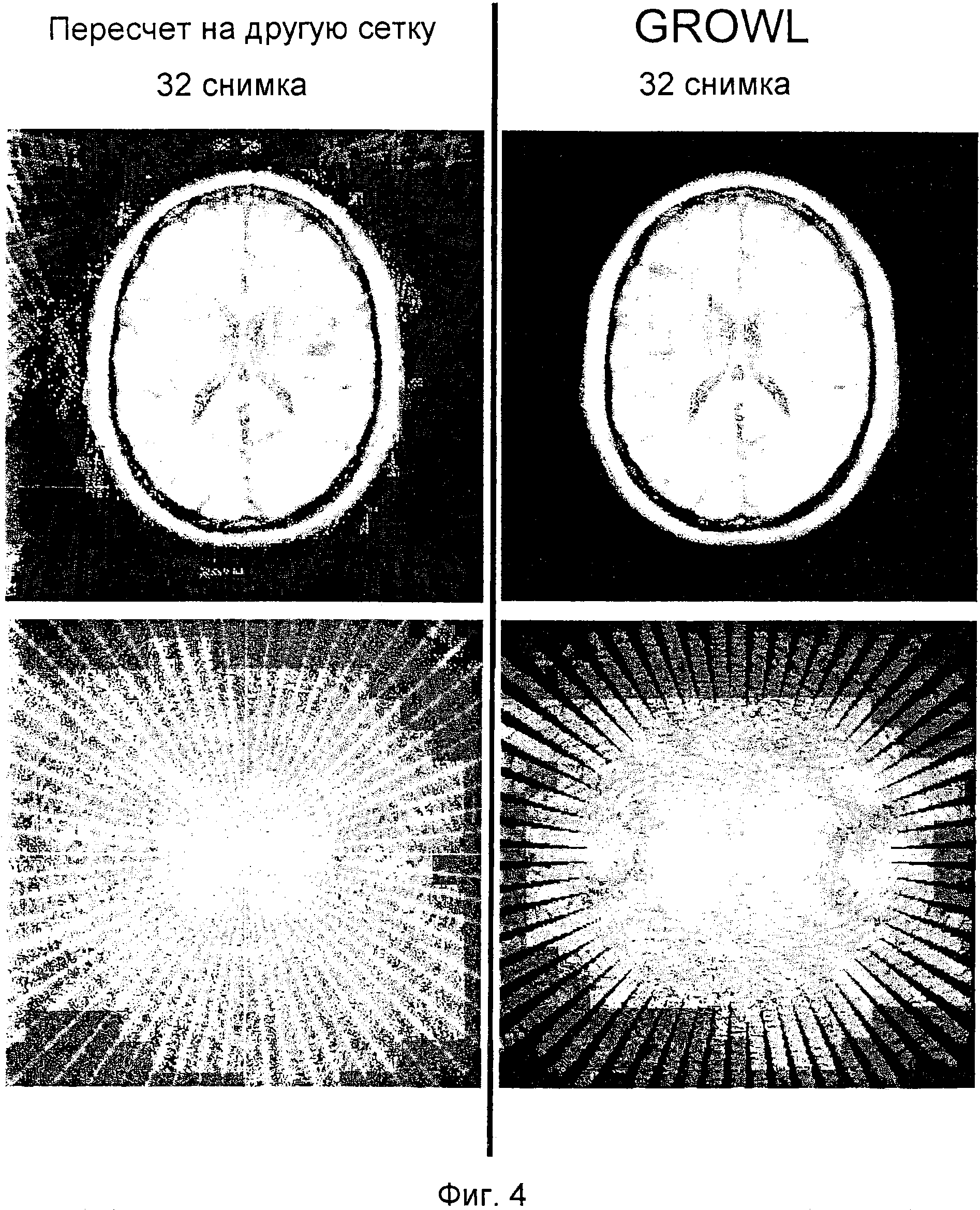
Фиг.4 показывает пример радиальной визуализации с прямой реконструкцией радиального набора данных с неполной выборкой на декартовой сетке с применением операторов GROWL.
Фиг.5-11 показывают иллюстративные примеры, в которых система визуализации по Фиг.1 обрабатывает набор данных MR-PPI с применением оператора GRAPPA и многоканального сжатия измерений.
Фиг.12-17 показывают иллюстративные примеры, в которых система визуализации по Фиг.1 обрабатывает набор динамических (k-t) данных MR-PPI с применением GROWL и временной фильтрации.
Если рассмотреть Фиг.1, система визуализации включает в себя магнитно-резонансный (МР) сканер 10, такой как показанный МР-сканер Achieva™ (реализуемый от Koninklijke Philips Electronics N.V., Eindhoven, Нидерланды), или МР-сканер Intera™ или Panorama™ (оба также реализуются Koninklijke Philips Electronics N.V.), или другой доступный на рынке МР-сканер, или некоммерческий МР-сканер, или тому подобное. В типичном варианте осуществления МР-сканер включает в себя внутренние компоненты (не показаны), такие как сверхпроводящий или резистивный главный магнит, формирующий статическое (B0) магнитное поле, набор витков катушек градиента магнитного поля для наложения выбранных градиентов магнитного поля на статическое магнитное поле, радиочастотная система возбуждения для формирования радиочастотного (B1) поля на частоте, выбранной для возбуждения магнитного резонанса (как правило, 1H магнитного резонанса, хотя также предусмотрено возбуждение других магнитно-резонансных ядер или множества магнитно-резонансных ядер), и радиочастотная приемная система, включающая в себя матрицу радиочастотных приемных катушек или множество приемных катушек, для детектирования сигналов магнитного резонанса, испускаемых субъектом.
МР-сканер 10 работает под управлением магнитно-резонансного (МР) управляющего модуля 12 для осуществления магнитно-резонансной частично параллельной визуализации (MR-PPI). При MR-PPI набор томографических данных с неполной выборкой получают посредством множества магнитно-резонансных приемных каналов, включая, например, радиочастотные приемные катушки схематически показанной матрицы 14 приемных катушек. При MR-PPI множество приемных катушек с различными чувствительностями катушек собирает набор МР-томографических данных с неполной выборкой, то есть пропуская некоторые данные (например, опуская сбор данных некоторых строк фазового кодирования, как делается в SENSE). Недостающие данные компенсируют посредством дополнительной информации, получаемой посредством использования множества приемных катушек с различными чувствительностями катушек, с применением подходящего метода реконструкции (например, метода реконструкции SENSE или SMASH). Неполнота выборки получаемого набора данных PPI соответствует коэффициенту ускорения сбора данных визуализации (как правило, обозначаемому R), величина которого зависит от степени неполноты выборки. В схематически показанном управляющем модуле 12 получением набора данных MR-PPI с неполной выборкой управляет субмодуль 16 сбора данных MR-PPI, а реконструкцию изображений осуществляет субмодуль 18 реконструкции изображений.
МР управляющий модуль 12 соответствующим образом включен в состав иллюстративного компьютера 20 или другого цифрового устройства обработки, использующего многоядерный процессор или другой параллельный процессор, одноядерный процессор, блок обработки графики, т.е. GPU, или тому подобное и имеющего коммуникационную шину или другое оперативное соединение с МР-сканером 10, заставляющее МР-сканер 10 осуществлять получение набора данных MR-PPI. При том, что цифровое устройство обработки использует цифровой процессор, также предусмотрено, что цифровое устройство обработки включает в себя или имеет доступ к некоторой аналоговой схеме, такой как, в качестве иллюстративного примера, специализированная интегральная схема (ASIC), выполненной с возможностью осуществления части или всей работы по реконструкции изображений субмодуля 18 реконструкция изображений. Раскрытые методы MR-PPI могут также быть реализованы в виде носителя для хранения, на котором сохранены команды, которые при выполнении процессором цифрового устройства 20 обработки осуществляют раскрытые операции MR-PPI. Например, носитель для хранения может содержать жесткий диск, оптический диск, память с произвольной выборкой (RAM), флэш-память или другую электростатическую память, их различные комбинации или другой подходящий носитель для хранения.
Система визуализации, как правило, также включает в себя иллюстративный клавиатуру 22 или другое пользовательское устройство ввода (например, мышь, трекбол или другое указательное устройство) посредством которого пользователь вводит команды, параметры или тому подобное для запуска и управления процессом визуализации. Реконструированное МР-изображение, формируемое модулем 18 реконструкции изображений, соответствующим образом отображается на устройстве отображения, таком как иллюстративное устройство 24 отображения иллюстративного компьютера 20. С этой целью иллюстративный МР управляющий модуль 12 включает в себя или приводит в действие субмодуль 26 отображения изображения, который осуществляет подходящую визуализацию реконструированного МР-изображения, такую как формирование трехмерной визуализации, или извлечение двумерного среза, или формирование проекции максимальной интенсивности (MIP), или формирование последовательности киноизображений, получаемой во время последовательности временных кадров, или тому подобное, и визуализация, сформированная субмодулем 26 отображения, отображается на устройстве 24 отображения. Дополнительно или альтернативно, реконструированное МР-изображение может сохраняться в памяти или устройстве хранения, связь с которым осуществляется посредством сети лечебного учреждения или Интернета, или использоваться как-либо еще (эти дополнительные/альтернативные варианты не показаны на Фиг.1).
Если продолжить рассмотрение Фиг.1, в методах MR-PPI, раскрытых в настоящем описании, комбинацию (1) расположения недостающих данных (то есть неполной выборки) и (2) способа восполнения недостающих данных разрабатывают так, чтобы получать по существу более быстрое получение томографических данных (что соответствует высокому общему коэффициенту ускорения R при получении полного набора данных) с по большей части уменьшенными артефактами изображения по сравнению с существующими методами. Некоторые такие раскрытые методы используют оператор GRAPPA для более широких радиальных полос (GROWL), чтобы распространить преимущества оператора GRAPPA на радиальные, спиральные или другие недекартовы наборы данных с неполной выборкой. Как раскрыто в настоящем описании, это может иметь преимущество предоставления внутренних данных самокалибровки в форме центральной области 30 k-пространства (включая k=0), выборка которой не является неполной, и которую можно использовать для калибровки GROWL. Доступность этих данных самокалибровки является естественным результатом радиальных строк радиального или спирального набора данных, сходящихся в k=0. В случае декартова набора данных MR-PPI центральная область k-пространства, включая k=0, может быть, необязательно, полностью выбрана для получения данных самокалибровки, встроенных в декартов набор данных MR-PPI. В других предусмотренных вариантах осуществления данные самокалибровки получают до получения набора данных MR-PPI.
В операции 32, выполняемой субмодулем 18 реконструкции, применяют оператор GRAPPA (который может быть реализован посредством GROWL в случае набора недекартовых данных MR-PPI), или другой метод интерполяции, такой как прямая свертка с применением подходящего ядра свертки, чтобы восполнить недостающие данные набора данных MR-PPI с неполной выборкой. Операция 32 использует для калибровки внутренние данные 30 самокалибровки. В некоторых вариантах осуществления оператор GRAPPA, GROWL, или прямая свертка восполняют все недостающие данные набора данных MR-PPI с неполной выборкой, чтобы сформировать увеличенный набор данных, содержащий набор данных MR-PPI с неполной выборкой и восполненные данные. В таких вариантах осуществления применяют алгоритм 34 реконструкции (который не является оператором GRAPPA и не является прямой сверткой), чтобы реконструировать увеличенный набор данных, или чтобы реконструировать набор данных MR-PPI с неполной выборкой с применением увеличенного набора данных в качестве набора инициализационных данных для итеративного алгоритма реконструкции.
В других вариантах осуществления, однако, операция 32 восполняет только некоторые, но не все недостающие данные набора данных MR-PPI с неполной выборкой. В этих вариантах осуществления признается, что такие методы как GROWL высоко эффективны для восполнения недостающих данных в небольшом диапазона, то есть когда недостающее данное расположено близко к полученному данному или полученным данным в k-пространстве. При этом такие методы как GROWL менее эффективны для восполнения недостающих данных в большем диапазоне, то есть когда недостающее данное расположено относительно далеко от любого полученного данного или полученных данных в k-пространстве. В этих вариантах осуществления операция 32 включает в себя оператор GRAPPA (который, как применяется в настоящем описании, охватывает GROWL), который восполняет данные в промежуточной области k-пространства, окружающей центральную область, тогда как алгоритм 34 (который, еще раз, отличен от оператора GRAPPA и отличен от прямой свертки) применяют для осуществления реконструкции, включающей в себя восполнение недостающих данных во внешней области k-пространства, окружающей промежуточную область k-пространства. В некоторых таких вариантах осуществления выборка промежуточной области k-пространства является неполной с первым коэффициентом ускорения R1, тогда как выборка внешней области k-пространства является неполной со вторым коэффициентом ускорения R2, где R2>R1. Кроме того, в некоторых таких вариантах осуществления алгоритм 34 реконструкции использует по меньшей мере промежуточную область k-пространства с недостающими данными, восполненными посредством оператора GRAPPA, в качестве данных самокалибровки. Необязательно, алгоритм 34 реконструкции может использовать комбинацию центральной области 30 k-пространства и промежуточной области k-пространства с недостающими данными, восполненными посредством оператора GRAPPA или операции 32 прямой свертки, в качестве данных самокалибровки.
Алгоритм 34 реконструкции может использовать реконструкцию с помощью преобразования Фурье, итеративный метод реконструкции или тому подобное. Операции 32, 34 могут быть интегрированы различными способами. Например, операция 32 может осуществляться в k-пространстве или в пространстве изображений. В подходах итеративной реконструкции предполагается осуществление одной или более итераций только с полученным набором данных MR-PPI, чтобы сформировать начальное приблизительное изображение, и затем применение операции 32, чтобы восполнить недостающие данные, за которой затем следуют следующие итерации итеративного алгоритма реконструкции. Операция 34 может реконструировать увеличенный набор данных, содержащий набор данных MR-PPI с неполной выборкой и восполненные данные, чтобы сформировать реконструированное изображение. Альтернативно, операция 34 может итеративно реконструировать набор данных MR-PPI с неполной выборкой, и использовать увеличенный набор данных, содержащий набор данных MR-PPI с неполной выборкой и восполненные данные, в качестве набора инициализационных данных для итеративного алгоритма реконструкции.
Если продолжить рассмотрение Фиг.1 и дополнительно рассмотреть Фиг.2, описан вариант осуществления для реконструирования радиального набора данных MR-PPI, который использует GROWL в операции 32. В данном варианте осуществления операция 32 использует оператор экстраполяции GRAPPA, чтобы расширить каждую радиальную строку до полосы, состоящей из нескольких параллельных строк. Самокалибровка достигается с применением центральной области 30 k-пространства, удовлетворяющей критерию Найквиста. С применением данного подхода время реконструкции, равное часу или более для существующих способов реконструкции при радиальной параллельной визуализации, может быть уменьшено до времени, составляющего порядка 5-10 минут. В качестве иллюстративного примера Фиг.2 схематически показывает трехмерную (3D) радиальную траекторию 40. Данные собирают вдоль радиальных строк в k-пространстве, но с угловой скоростью более низкой, чем необходимая для удовлетворения критерия выборки Найквиста. Во время фазы реконструкции применяется оператор GRAPPA для более широких радиальных полос (GROWL), чтобы распространить каждую радиальную строку в полосу 42, состоящую из нескольких параллельных строк k-пространства. Поскольку данные около центрального k-пространства выбраны полностью, их можно использовать в качестве данных 30 самокалибровки (см. Фиг.1).
При подходе, подходящем для восполнения недостающих данных с применением GROWL, применяют оператор относительного сдвига GRAPPA, чтобы распространить каждую радиальную строку в полосу или сегмент 42 k-пространства, состоящий из m параллельных строк k-пространства. Центральная область 30 k-пространства соответствует кругу (или сфере) Найквиста, внутри которого выборка удовлетворяет критерию выборки Найквиста. Данная центральная область 30 k-пространства используется для калибровки. В иллюстративном примере вводится оптимальный коэффициент регуляризации Тихонова, чтобы минимизировать ошибку, вводимую оператором относительного сдвига GRAPPA. Пусть t и S представляют собой вектор цели и матрицу исходных точек данных от множества местоположений k-пространства и каналов катушек. Пусть w представляет собой весовой вектор для оператора относительного сдвига GRAPPA. Во время процесса калибровки определяется весовой вектор w посредством решения переопределенного линейного уравнения tACS=SACSw, где нижний индекс ACS обозначает сигнал автокалибровки (т.е. центральную область 30 k-пространства). Нижний индекс ACS указывает на то, что как целевые, так и исходные точки данных получают в области 30 ACS. Подходящим способом решения линейного уравнения tACS=SACSw является линейный метод наименьших квадратов, с помощью которого добиваются минимизации остаточной ошибки w0=arg minw(||tACS=SACSw||2), где знаками ||...|| обозначена L2-норма. Оптимальный весовой вектор, однако, должен минимизировать ошибку во всем k-пространстве, то есть wopt=arg minw(||tE=SEw||2), где нижний индекс E указывает на то, что как целевые, так и исходные точки данных получают во всем k-пространстве. Другими словами, идеальный весовой вектор является решением следующего уравнения: tE=SEw. Однако, поскольку известна только SE, данное уравнение не может быть решено. Вместо этого применяют регуляризацию Тихонова, чтобы решить уравнение tACS=SACSw посредством минимизации wopt=arg minw{||tACS-SACSw||2+λ2||w||2}, где λ известно как коэффициент Тихонова. Решением данного уравнения является  , где uj, vj и sj представляют собой левые сингулярные векторы, правые сингулярные векторы и сингулярные числа S соответственно, получаемые посредством сингулярного разложения, причем сингулярные векторы и сингулярные числа снабжены индексом j.
, где uj, vj и sj представляют собой левые сингулярные векторы, правые сингулярные векторы и сингулярные числа S соответственно, получаемые посредством сингулярного разложения, причем сингулярные векторы и сингулярные числа снабжены индексом j.
При подходе, подходящем для реализации операции 32 восполнения данных, данные в центральной области 30 k-пространства (которая в данном случае представляет собой круг или сферу Найквиста) в начале пересчитываются из собранных радиальных строк на декартову сетку. Для каждой считываемой радиальной строки применяется способ сдвига, чтобы вращать перенесенный декартов набор данных для совмещения со считываемой строкой. Затем веса оператора относительного сдвига GRAPPA вычисляются по этой калибровочной области и используются, чтобы расширить каждую считываемую строку в более широкую полосу. Альтернативно, декартова целевая точка около полученной считываемой строки непосредственно определяется с применением ядра свертки.
Если продолжить рассмотрение Фиг.1 и дополнительно рассмотреть Фиг.3, вариант осуществления для реконструирования спирального набора 50 данных MR-PPI использует GROWL в операции 32. Данный подход основан на следующих наблюдениях. Поскольку все МР-сканеры обладают конечной скоростью нарастания градиента, считываемая строка любой траектории обладает конечной кривизной. В первом приближении точки данных на считываемой строке размещены линейно. Операция 32, которая в данном варианте осуществления представляет собой оператор GROWL, представляет собой ядро свертки, объединяющее множество соседних исходных точек от множества канальных элементов. Следовательно, можно использовать оператор GROWL для определения целевой точки, расположенной дальше (как правило, на 1-3/FOV, в зависимости от катушки и уровня шума) от исходных считываемых строк. Это показано на вставке 52 Фиг.3 для спиральной траектории 50. Тремя параметрами, которые определяют оператор GROWL, являются: число исходных точек Nx, расстояние целевой точки от исходной считываемой строки Δky и ориентация θ. Если задана конфигурация катушки, Nx можно фиксировать, и массив операторов GROWL с дискретными наборами различных Δky и θ можно предварительно откалибровать и затем использовать. Калибровку оператора GROWL можно осуществлять с применением или полностью выбранного k-пространства (например, для радиального и спирального с переменной скрученностью), или отдельного сканирования для картирования чувствительности.
Способ по Фиг.2 или 3 можно осуществлять следующим образом: каждая считываемая строка распространяется в более широкую полосу. Целевые точки остаются на недекартовой сетке. Затем применяется процедура изменения сетки, чтобы осуществить конечную реконструкцию. В альтернативном воплощении декартова целевая точка около полученной считываемой строки непосредственно определяется с применением ядра свертки. В настоящем описании это называется прямой сверткой. Для радиальных и спиральных траекторий необходимо много ядер свертки, чтобы экстраполировать данные под различными углами. Поскольку расстояние Δky может представлять собой произвольное значение, два ядра с наиболее близкими значениями Δky можно интерполировать, чтобы вывести требуемые значения ядра, для уменьшения времени вычислений.
Фиг.4 показывает радиальный пример с непосредственной реконструкцией радиального набора данных с неполной выборкой (8-канальная катушка, 32 снимка, размер матрицы 256 x 256) на декартовой сетке с применением операторов GROWL. С левой стороны показан результат после пересчета на декартову сетку, тогда как с правой стороны показан результат после применения операторов GROWL. Верхние изображения представляют собой реконструированные МР-изображения, тогда как нижние изображения показывают величину соответствующего k-пространства на логарифмической шкале.
GROWL является быстрым методом реконструкции из-за небольшого размера ядра и, как правило, небольших областей калибровки. В экспериментах как радиальные, так и спиральные изображения реконструировали в пределах 10 секунд на персональном компьютере (ПК) с 3,0 ГГц. Эффективность оператора GROWL можно дополнительно улучшить посредством учета кривизны считываемой строки и применения различной регуляризации к различным областям k-пространства (то есть замены tE и SE, соответствующих получению соответствующих целевых и исходных точек данных во всем k-пространстве, такими значениями для выбранных областей k-пространства, что кривизна относительно однородна в каждой выбранной области).
Приведенные выше иллюстративные примеры по Фиг.2-4 используют операцию 32 восполнения данных с применением GROWL в качестве единственной операции восполнения данных. В следующих примерах операция 32 восполнения данных восполняет некоторые недостающие данные, тогда как дополнительные недостающие данные восполняются с применением другого метода, который может использовать результат GROWL в качестве данных самокалибровки.
Если продолжить рассмотрение Фиг.1 и дополнительно рассмотреть Фиг.5-11, описаны иллюстративные примеры, в которых операция 32 использует оператор GRAPPA, и алгоритм 34 реконструкции использует многоканальное сжатие измерений. Эти примеры используют оператор GRAPPA в операции 32, чтобы восполнять недостающие данные и, необязательно, чтобы улучшить инициализацию алгоритма 34 реконструкции, использующего сжатие измерений (или, в более общем смысле, итеративную реконструкцию). Как видно на Фиг.5, это соответствующим образом сделано в отношении траектории k-пространства или набора 60 данных, имеющих три степени плотности, выбранных так, чтобы достигать равновесия между высоким коэффициентом ускорения и качеством изображения. Иллюстративный полученный набор 60 данных MR-PPI включает три области: центральную область 62 k-пространства, включая k=0, выборка которой не является неполной; промежуточную область 64 k-пространства, окружающую центральную область 62 k-пространства, выборка которой является неполной с первым коэффициентом ускорения R1; и внешнюю область 66 k-пространства, окружающую промежуточную область 64 k-пространства, выборка которой является неполной со вторым коэффициентом ускорения R2, где R2>R1 (то есть внешняя область 66 выбрана реже, или имеет более неполную выборку, чем промежуточная область 64). В иллюстративном варианте осуществления R1=2, и промежуточная область 64 выбрана в шахматном порядке, и R2>2, и внешняя область 66 соответствует траектории диска Пуассона. На Фиг.5 направление kx перпендикулярно бумаге. Центральная область 62 k-пространства представляет собой область 24×24 и имеет R=1 (то есть ее выборка не является неполной). Промежуточная область 64 k-пространства представляет собой область 64×64 и имеет R1=2 с расположением в шахматном порядке. Внешняя область 66 k-пространства имеет R2=9 с траекторией диска Пуассона.
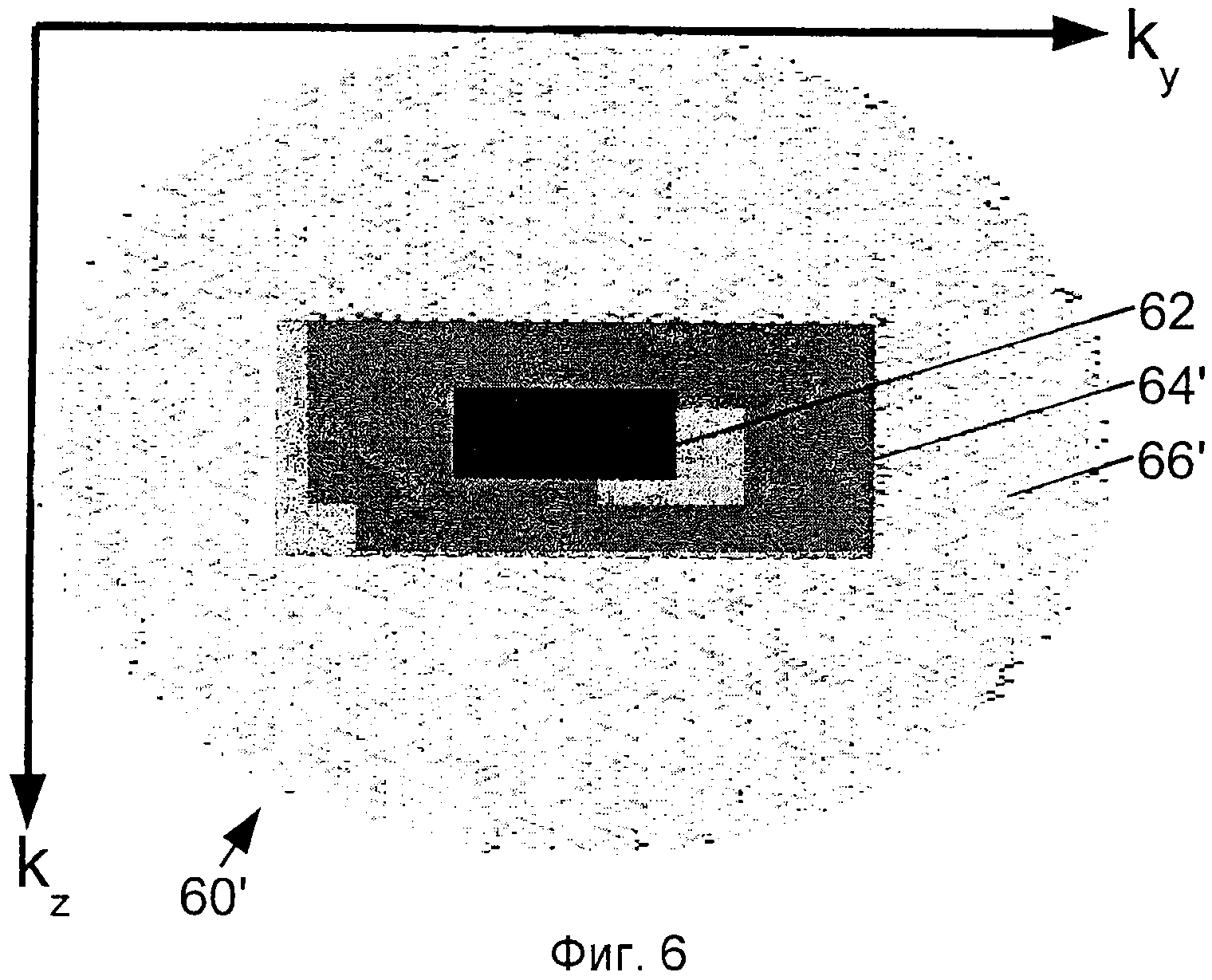
Фиг.6 показывает траекторию k-пространства или набор 60' данных, соответствующий траектории k-пространства или набору 60 данных по Фиг.5, после применения операции 32, использующей оператор GRAPPA. Оператор GRAPPA применяют, чтобы распространить каждую строку kx так, чтобы она составила по меньшей мере 5 строк. Экстраполяция осуществляется вдоль направлений ky и kz. Размер ядра может составлять до 1 точки от каждого канала, хотя также предусмотрены большие размеры ядер. Такая операция 32 является быстрой, поскольку размер ядра свертки мал. Кроме того, благодаря дополнительному восполнению недостающих данных, обеспечиваемому в данных вариантах осуществления алгоритмом 34 реконструкции, не является необходимым аппроксимировать все не полученные данные k-пространства. Траектория k-пространства или набор 60' данных Фиг.6 представляет собой увеличенный набор 60' данных, содержащий набор 60 данных MR-PPI с неполной выборкой и недостающие данные, которые восполнены посредством операции 32, которая в данном варианте осуществления использует оператор GRAPPA. В увеличенном наборе 60' данных центральная область 62 k-пространства полностью выбрана во время сбора данных и не модифицируется посредством оператора GRAPPA - точнее, центральная область 62 k-пространства применяется в качестве данных самокалибровки при применении оператора GRAPPA. Промежуточная область 64 k-пространства, имеющая R1=2 при получении, преобразуется в увеличенную промежуточную область 64' k-пространства, имеющую R1'=1, посредством применения оператора GRAPPA. Таким образом, выборка увеличенной промежуточной области 64' k-пространства больше не является неполной, и его можно использовать при расчете карт чувствительности для итеративного алгоритма 34 реконструкции. Применение оператора GRAPPA во внешней области 66 k-пространства, имеющей R2=9, приводит к увеличенной внешней области 66' k-пространства, в которой некоторые недостающие данные восполнены, но выборка которой остается неполной, так что R2' остается больше единицы.
В варианте осуществления с Фиг.5-11 итеративный алгоритм 34 реконструкции представляет собой подходящий тип сжатия измерений. В некоторых вариантах осуществления, называемых в настоящем описании «строгим» подходом, алгоритм 34 реконструкции реконструирует увеличенный набор 60' данных (см. Фиг.6), содержащий набор 60 данных MR-PPI с неполной выборкой (см. Фиг.5) и недостающие данные, которые восполнены посредством операции 32, использующей оператор GRAPPA. Данный подход является предпочтительным, если предполагается, что точность оператора GRAPPA высока. В данных вариантах осуществления результат оператора GRAPPA обрабатывается так же, как и полученные данные, и используется в члене достоверности уравнения минимизации сжатия измерений или другой реконструкции.
В других вариантах осуществления, называемых в настоящем описании «нестрогим» подходом, алгоритм 34 реконструкции реконструирует набор 60 данных MR-PPI с неполной выборкой (см. Фиг.5) и использует увеличенный набор 60' данных (см. Фиг.6), содержащий набор данных MR-PPI с неполной выборкой и недостающие данные, которые восполнены посредством операции 32, использующей оператор GRAPPA для инициализации итеративной реконструкции. Данный подход является предпочтительным, если предполагается, что точность оператора GRAPPA менее высока. В данных вариантах осуществления результат оператора GRAPPA используется только для улучшения инициализации итерации реконструкции.
Точность оператора GRAPPA соответствующим образом определяют на основании геометрии катушки и размера ядра свертки. Таким образом, выбор между строгим или нестрогим подходом к обработке результатов оператора GRAPPA может быть сделан до осуществления реконструкции. При применении восьмиканальной головной катушки, доступной от Invivo Corp. Gainesville, FL, в качестве примера строгий подход является подходящим, если направлением фазового кодирования является или слева направо или спереди назад, и используются три или более исходных точки из данных одного среза каждого канала. С другой стороны, нестрогий подход является подходящим, если от каждого элемента катушки используется только одна исходная точка.
В вариантах осуществления по Фиг.5-11 сжатие измерений или разреженное кодирование SENSE с автоматической загрузкой данных соответствующим образом используются в алгоритме 34 реконструкции с применением результата оператора GRAPPA, полученного в операции 32, в качестве инициализации. Если катушки обладают возможностью пространственного кодирования вдоль всех трех направлений, то в операции 32 можно использовать ядро 5x1. Кроме того, результат оператора GRAPPA может, необязательно, использоваться в члене достоверности разреженное кодирование SENSE с автоматической загрузкой данных (только при строгом подходе), а также в улучшенной инициализации (как при строгом, так и при нестрогом подходах).
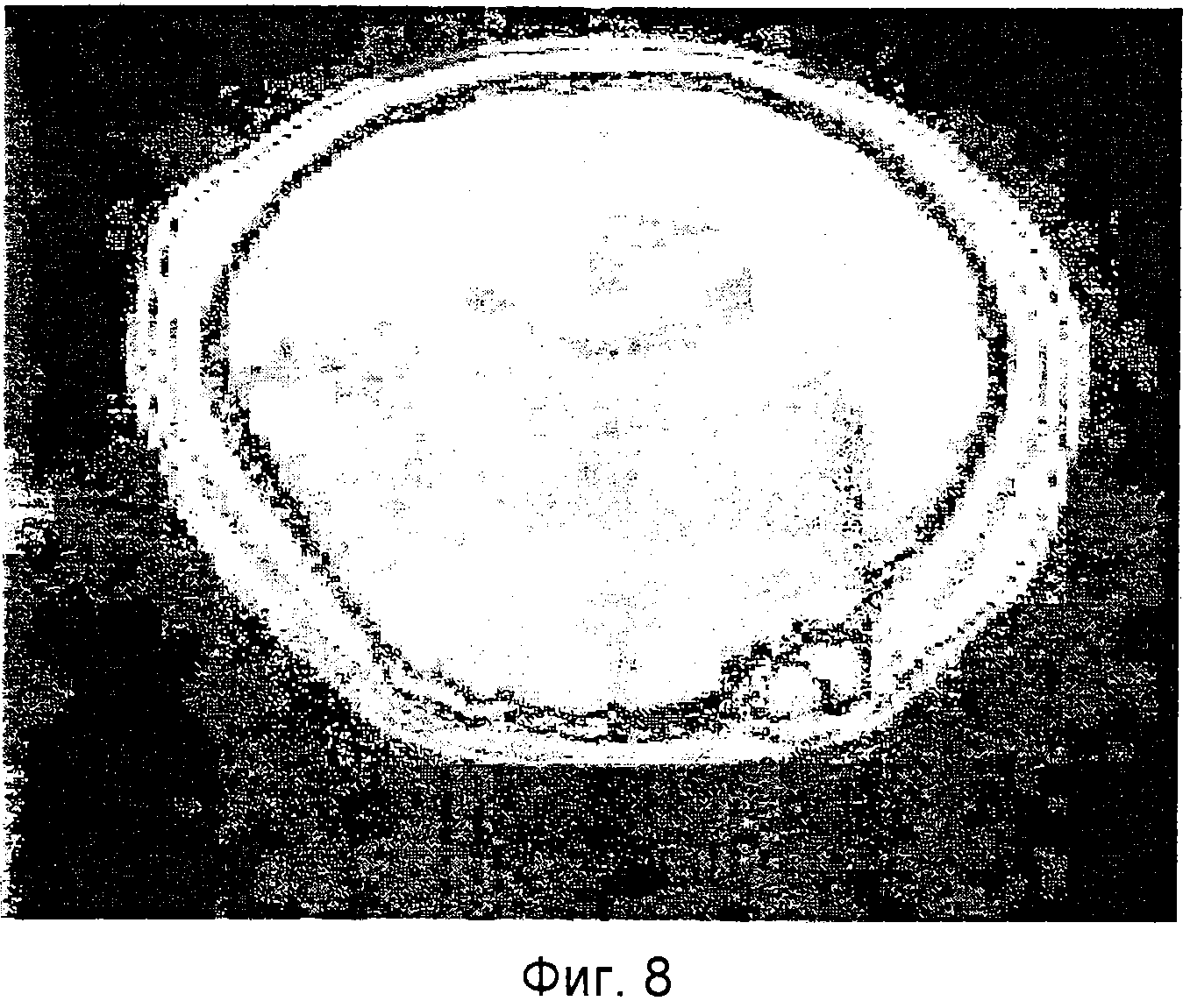
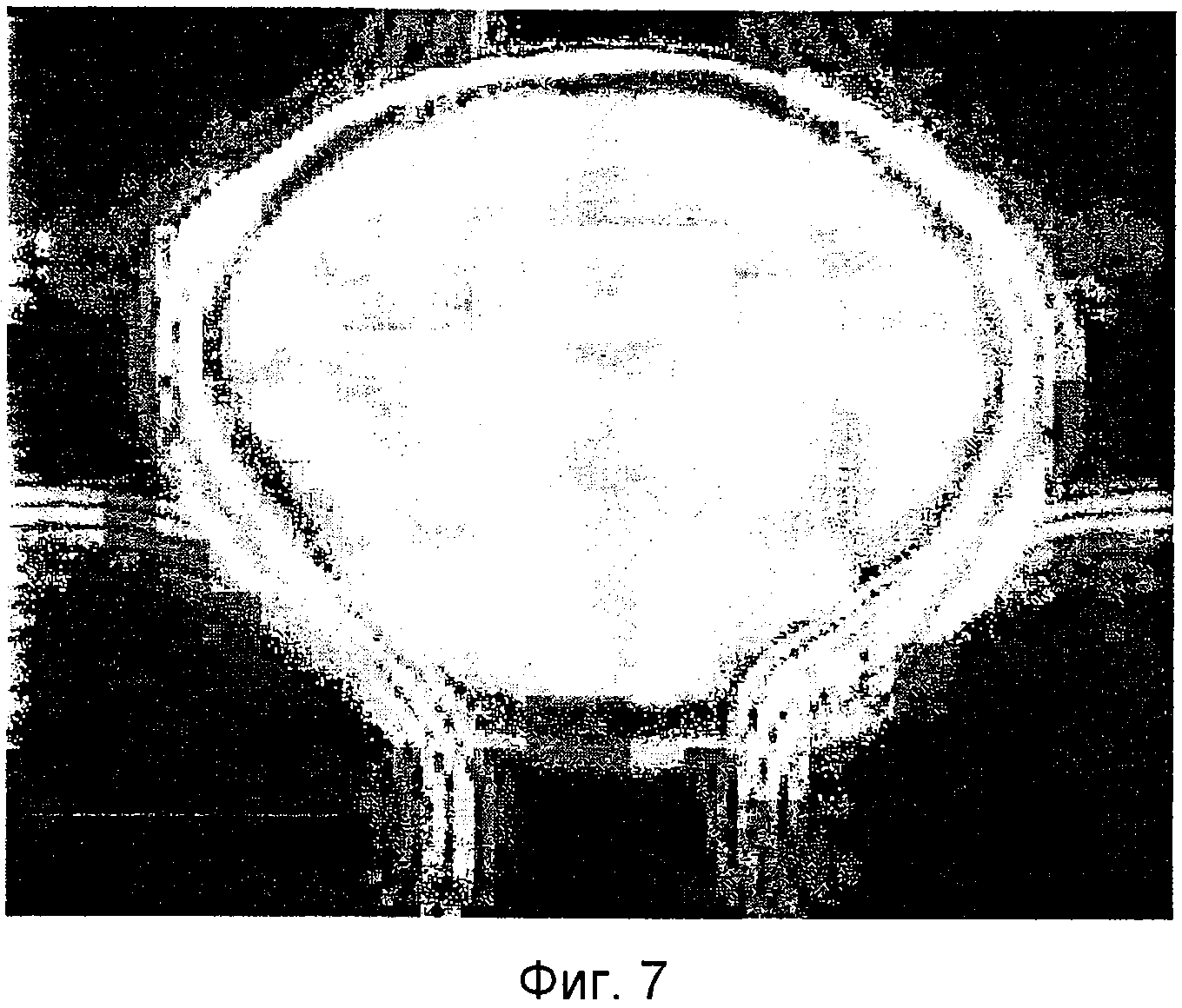
Если рассмотреть Фиг.7 и 8, показаны реконструированные МР-изображения, соответствующие реконструкции наборов 60, 60' данных по Фиг.5 и 6 соответственно. Видно, что качество изображений значительно улучшается с помощью оператора GRAPPA (Фиг.8 и набор 60' данных по Фиг.6) по сравнению с отсутствием оператора GRAPPA (Фиг.7 и набор 60 данных по Фиг.5). Следовательно, результат оператора GRAPPA (Фиг.8) является лучшей инициализацией, чем Фиг.7 для разреженного кодирования SENSE с автоматической загрузкой данных.
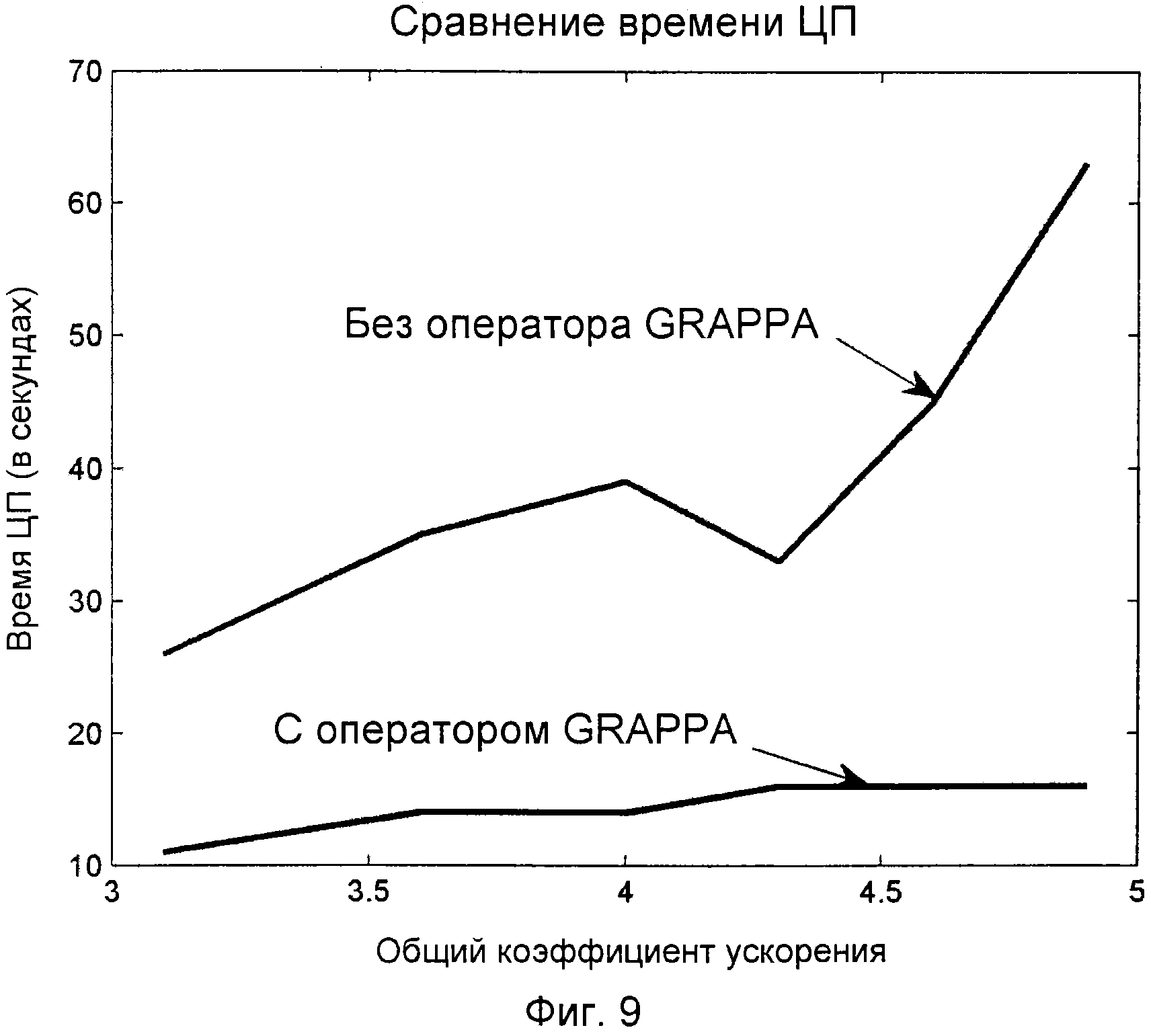
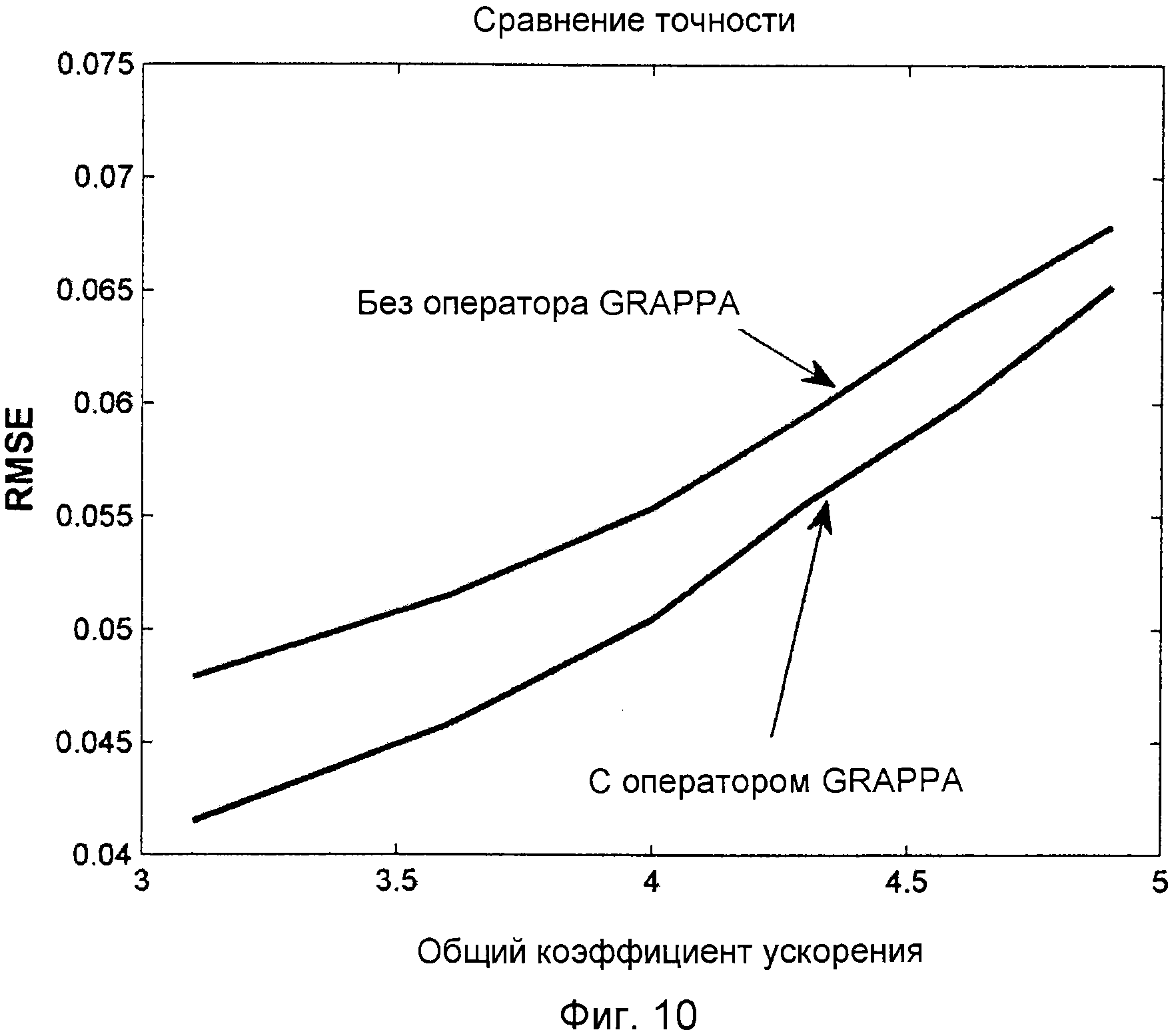
Если рассмотреть Фиг.9 и 10, показано сравнение эффективности инициализации разреженного кодирования SENSE с автоматической загрузкой данных с оператором GRAPPA и без него. Фиг.9 показывает сравнение времени ЦП (то есть скорости вычислений), тогда как Фиг.10 показывает сравнение точности. В результатах визуализации, нанесенных на Фиг.9 и 10, результат оператора GRAPPA использовался в слабом подходе, то есть только для того, чтобы улучшить инициализацию. Фиг.9 показывает, что скорость схождения может стать вплоть до четырех раз большей, когда общий коэффициент ускорения близок к 5. Фиг.10 показывает, что точность также соответственно улучшается с инициализацией, улучшенной оператором GRAPPA.
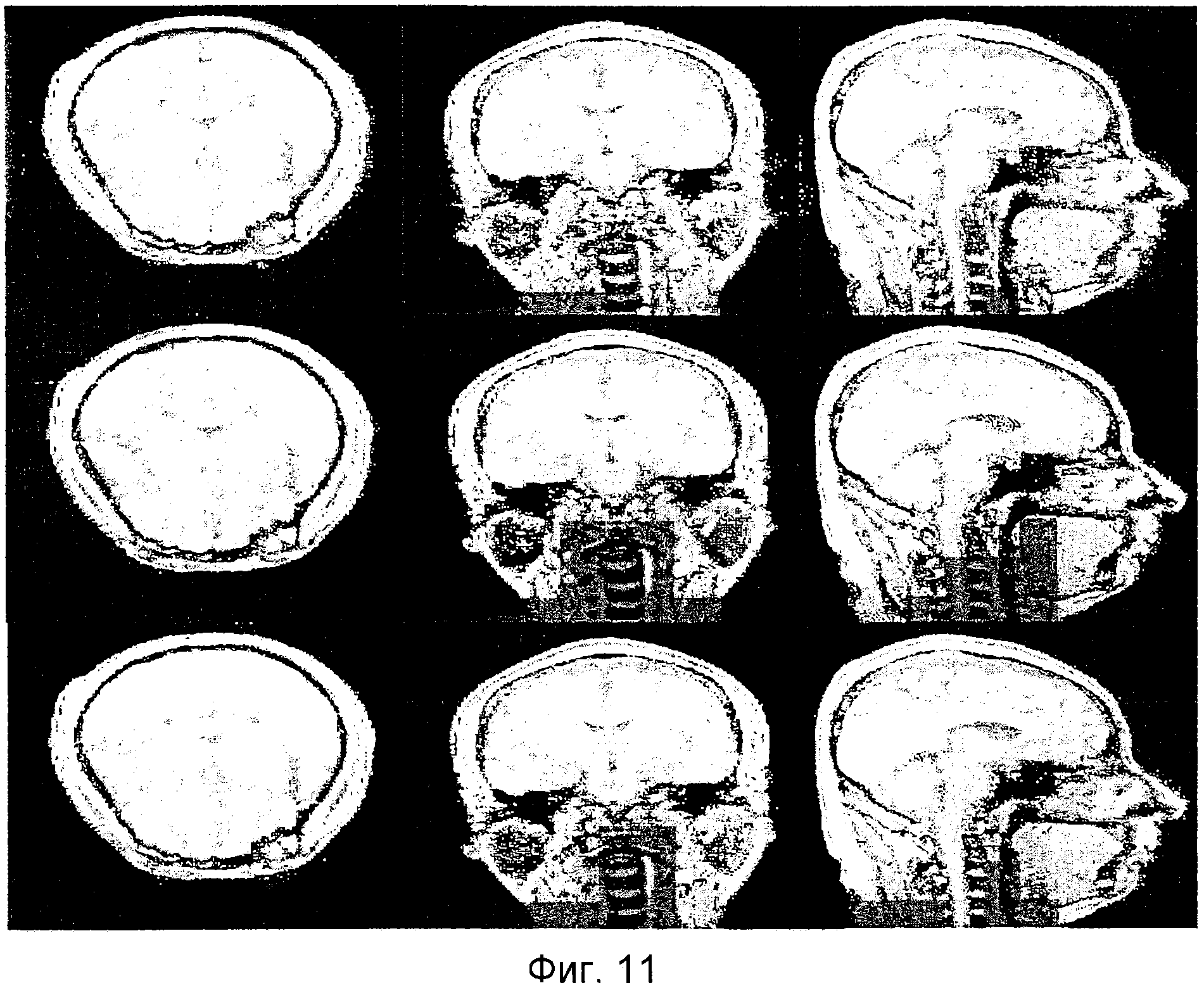
Что касается Фиг.11, комбинация операции 32, использующей оператор GRAPPA (или GROWL в случае недекартовых данных), и сжатия измерений, как раскрыто в настоящем описании, может значительно уменьшить время сбора МР данных для 3D-визуализации с высоким разрешением. Для набора данных 256x227x8x115 время сбора данных может занимать около 10 минут с применением последовательности 3D FFE на МР-сканере Philips. С применением раскрытого подхода время сбора данных может быть уменьшено до 2 минут без существенного ухудшения изображения. Это иллюстрирует Фиг.11. В верхней строке Фиг.11 показано 3D-изображение с высоким разрешением, полученное с применением восьмиканальной головной катушки со временем сбора данных, равным 10 минут. В верхней строке показана реконструкция посредством раскрытого способа с набором данных MR-PPI, включающим выборку только 25% (75% данных не выбраны), что означает, что время сбора данных может быть уменьшено до 2,5 минут. В нижней строке показана реконструкция посредством раскрытого способа с набором данных MR-PPI, включающим выборку только 20% (80% данных не выбраны), что означает, что время сбора данных может быть уменьшено до 2 минут. Как видно на Фиг.11, качество изображений по существу не ухудшилось для этих сильно ускоренных получений MR-PPI.
При том что иллюстративный вариант осуществления по Фиг.5-11 использует наборы декартовых данных MR-PPI и оператор GRAPPA, расширение на наборы недекартовых данных MR-PPI с применением оператора GRAPPA для более широких радиальных полос (GROWL) является простым. Кроме того, вместо оператора GRAPPA может использоваться такой метод, как прямая свертка.
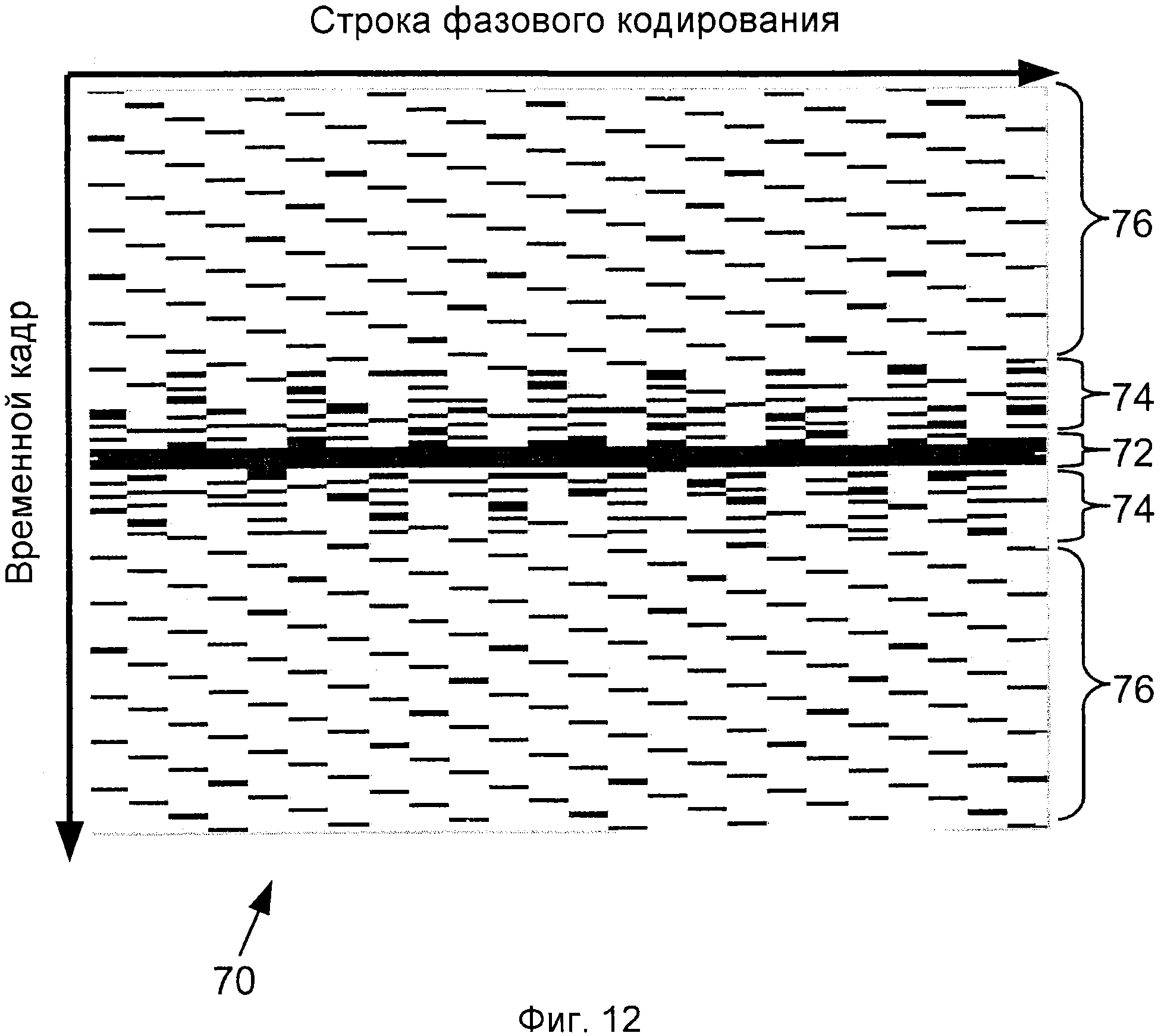
Если рассмотреть Фиг.12-17, описаны иллюстративные примеры, в которых подход по Фиг.5-11 адаптирован для динамической визуализации в течение последовательности следующих друг за другом временных кадров. Как видно на Фиг.12, данный подход использует траекторию k-t или набор 70 данных, имеющий три степени плотности. Выборка центральной области 72 k-пространства, включая k=0, не является неполной (т.е. имеет коэффициент ускорения R=1). Эта область может, например, содержать пять строк вокруг центра k-пространства. Выборка промежуточной области 74 k-пространства, окружающей центральную область 72 k-пространства, является неполной с первым коэффициентом ускорения R1. В некоторых вариантах осуществления R1=3 и данная область имеет ширину, равную 20 строк, хотя предусмотрены и другие значения. Выборка внешней области 76 k-пространства, окружающей промежуточную область 74 k-пространства, является неполной со вторым коэффициентом ускорения R2, где R2>R1 (то есть внешняя область 76 выбрана реже, или имеет более неполную выборку, чем промежуточная область 74). В некоторых вариантах осуществления внешняя область 76 выбирается с применением траектории или схемы, как описано в Tsao et al., "Optimizing Spatiotemporal Sampling for k-t BLAST and k-t SENSE: Application to High-Resolution Real-Time Cardiac Steady-State Free Precession", Magn. Reson. Med. vol. 53 стр. 1372-82 (2005), хотя также предусмотрены и другие схемы или траектории k-пространства. Иллюстративный пример по Фиг.12 имеет общий коэффициент ускорения, равный 6,4, с полной выборкой во все временные промежутки для 5 строк, расположенных в самом центре (центральная область 72 k-пространства). Следующую 21 строку в сторону от центра (промежуточная область 74 k-пространства) получают с уменьшающим коэффициентом, равным 3. 21 строка расположена периодически по схеме с временным периодом, равным трем соседним временным кадрам. Самые внешние строки (внешняя область 76 k-пространства) имеют уменьшающий коэффициент 10.
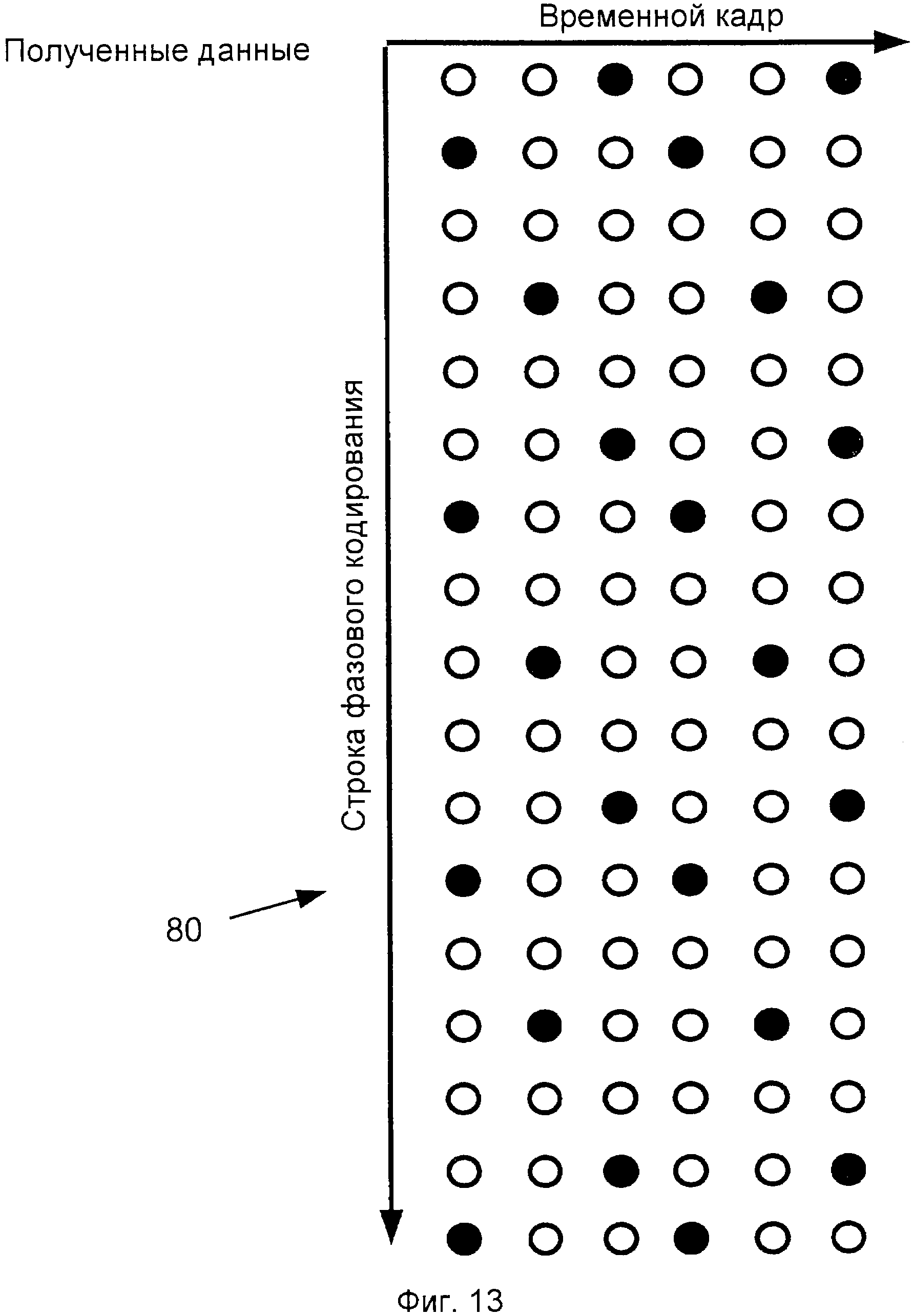
В подходе динамической МР-томографии по Фиг.12-17 используется GROWL, чтобы точно экстраполировать строки k-пространства и, следовательно, уменьшается коэффициент ускорения для временной фильтрации. В данном случае GROWL применяется по временному измерению. Примеры показаны для декартовой выборки (Фиг.13-15) и для радиальной выборки (фиг.16).
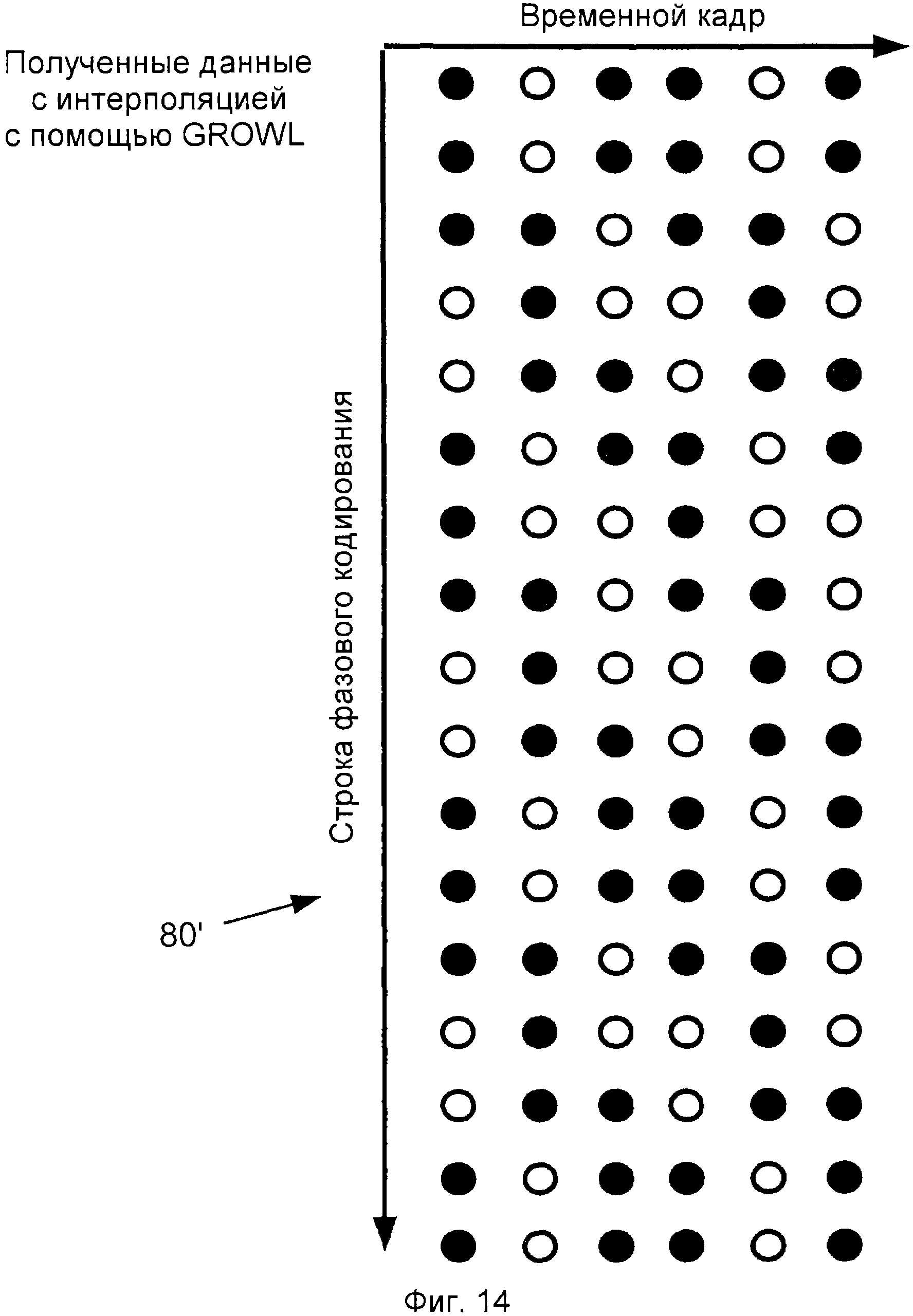
Фиг.13-15 иллюстрируют пример декартовой выборки. Фиг.13 показывает иллюстративный набор 80 данных k-t MR-PPI, получаемый посредством субмодуля 16 сбора данных MR-PPI (см. Фиг.1 выше). Полученные данные показаны закрашенными кружками, тогда как пропущенные (т.е. не полученные) данные показаны пустыми кружками. Фиг.13 показывает два периода (т.е. шесть временных кадров) изменяющейся во времени схемы сбора данных с периодичностью три временных периода.
Фиг.14 показывает увеличенный набор 80' данных k-t, содержащий полученные данные и дополнительные недостающие данные, которые восполнены посредством GROWL, с использованием закрашенных кружков для обозначения данных, добавленных посредством GROWL. После GROWL уменьшающий коэффициент уменьшается в 3 раза.
Фиг.15 показывает дополнительно увеличенный набор 80'' данных k-t после необязательной дополнительной операции восполнения, в которой дополнительные недостающие данные восполняются посредством обмена данными между соседними временными кадрами. На Фиг.15 данные, восполненные посредством обмена данными между временными кадрами, также обозначены закрашенными кружками.
Фиг.16 показывает пример радиального сбора данных. Точнее говоря, Фиг.16 показывает временной кадр, обозначенный t=2, в который полученный набор данных k-t MR-PPI представляет собой одну строку (ориентированную вертикально на Фиг.16) и увеличен посредством GROWL и посредством обмена данными от соседних временных кадров t=1 и t=3. Выборка между каждыми последующими временными кадрами осуществляется в различных радиальных направлениях, так что обмен данными между временными кадрами радиального сбора данных обеспечивает существенное ускорение. При этом данные в центральной области k-пространства, включая k=0, выбираются за каждый временной кадр, чтобы получить полностью выбранные данные для самокалибровки GROWL. Ускорение является существенным, поскольку одна (вертикальная) строка k-пространства, полученная за временной кадр t=2, увеличивается до 5 строк (две вертикальные строки добавляются посредством GROWL и две ортогональные строки добавляются посредством необязательного обмена по времени от соседних временных кадров t=1 и t=3). Если необязательный обмен по времени опускается, то достигается ускорение в три раза (одна полученная строка и две дополнительные строки, формируемые посредством GROWL).
Подходящий подход к динамической визуализации, использующий восполнение данных, как описано в иллюстративных примерах декартова и радиального наборов данных по Фиг.13-16, осуществляется следующим образом. Во-первых, осуществляется вспомогательное уменьшение изображения, чтобы увеличить точность GROWL. Подходящим подходом является вычитание среднего k-пространства (вдоль временного направления) из каждого временного кадра в соответствующих требуемых положениях. Затем осуществляется GROWL для каждого временного кадра. Это влечет за собой распространение каждой строки на три строки (в более общем случае распространение может быть большим или меньшим, чем три строки, в зависимости от размера ядра, используемого в GROWL). Ядро может или подвергаться самокалибровке с применением полностью выбранной центральной области 72 k-пространства, как в примерах, или может рассчитываться с применением предварительно отсканированных карт чувствительности. Это восполнение данных посредством GROWL соответствующим образом осуществляется посредством операции 32 (см. Фиг.1).
Необязательно, дополнительное восполнение данных обеспечивается посредством обмена данными с соседними временными кадрами. (Это соответствует восполнению данных, показанному на Фиг.15 для декартовых данных, или посредством данных временных кадров t=1 и t=3 в примере радиального набора данных по Фиг.16). Высокочастотная информация от соседних временных кадров может подвергаться обмену без существенного воздействия на временное разрешение такого, чтобы дополнительно уменьшить коэффициент ускорения.
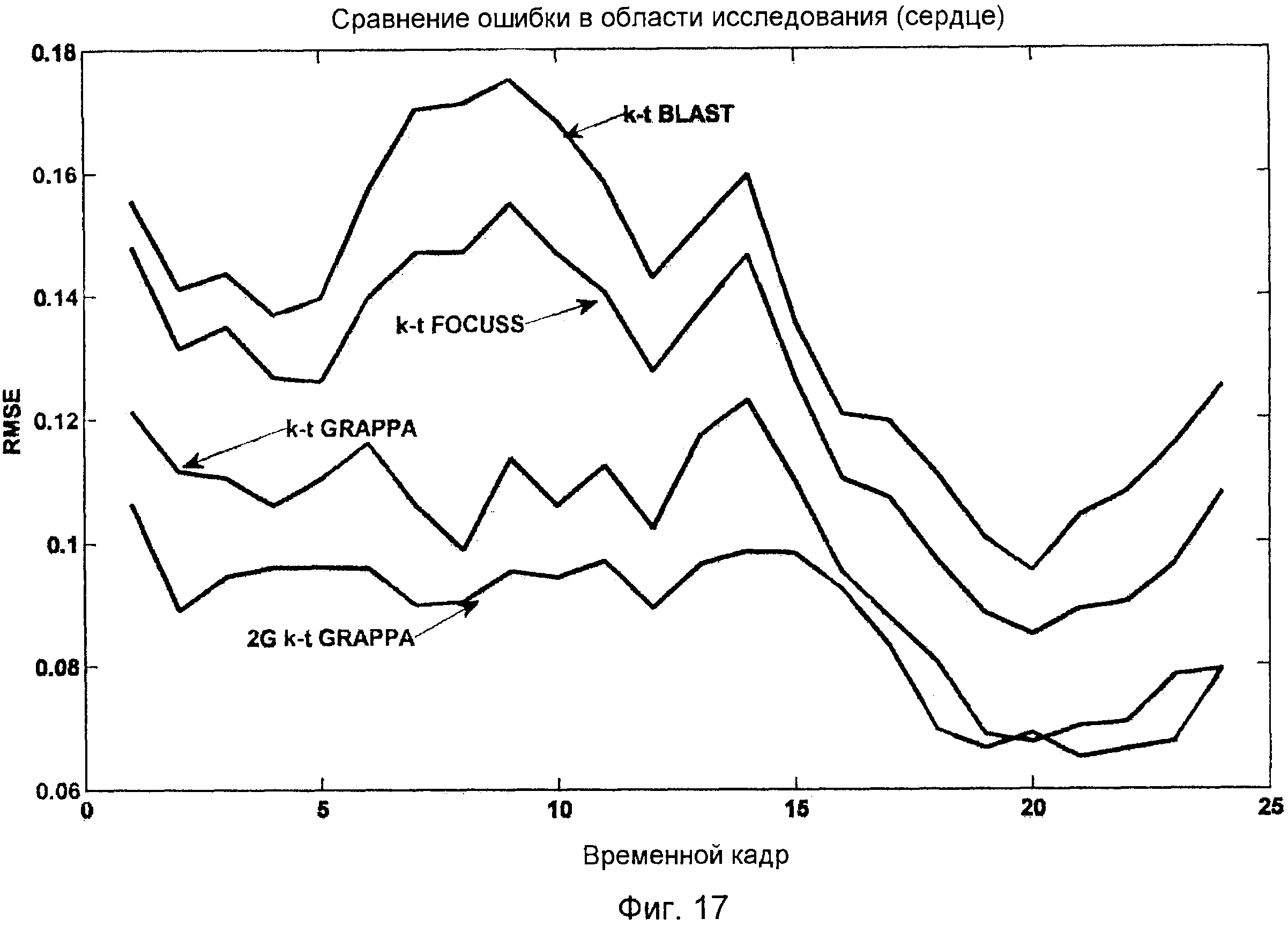
Набор данных k-t с по меньшей мере некоторыми недостающими данными, восполненными посредством GROWL и, необязательно, посредством обмена по времени между временными кадрами, затем обрабатывается посредством итеративного алгоритма, осуществляющего временную фильтрацию, чтобы восполнить по меньшей мере некоторые недостающие данные. Данный итеративный алгоритм соответствующим образом реализуется в виде алгоритма 34 реконструкции (см. Фиг.1). Могут использоваться различные алгоритмы временной фильтрации, такие как k-t PCA, k-t BLAST, k-t FOCUSS, k-t SPARSE, k-t GRAPPA или тому подобные. В некоторых вариантах осуществления используется k-t FOCUSS. Смотри, например Jung et al., "k-t FOCUSS: A general compressed sensing framework for high resolution dynamic MRI", Magnetic Resonance in Medicine vol. 61 pp. 103-116 (2009)). Затем следует вспомогательная компенсация изображения, соответствующим образом реализуемая посредством добавления среднего k-пространства обратно к каждому временному кадру. Также необязательно осуществляется свертка в k-пространстве, с соответствующим применением небольшого ядра, например с размером ядра 5X1 или 7X1. Только данные, интерполированные с применением временной фильтрации, используют результаты необязательной свертки.
Если рассмотреть Фиг.17, раскрытая визуализация k-t MR-PPI может быть применена для получения изображения в реальном времени и/или динамической визуализации с произвольными траекториями. Иллюстративный пример представляет собой киновизуализацию сердца, при которой размер набора данных составляет 160×256×24(канала)×24(временных кадра). Фиг.17 показывает сравнение точности, измеренной как среднеквадратичная ошибка, RMSE, в сердечной области исследования для общего уменьшающего коэффициента, равного 5.
В настоящей заявке описаны один или более предпочтительных вариантов осуществления. После прочтения и понимания вышеприведенного подробного описания другим лицам могут быть очевидны модификации и изменения. Подразумевается, что настоящую заявку следует интерпретировать как включающую в себя все такие модификации и изменения в той степени, в которой они входят в объем прилагаемой формулы изобретения или ее эквивалентов.
Спинодержатель для автоматизированной системы cpr
Управление затеняющим устройством посредством распознавания изображений
Венчик для взбивания и смесительное устройство с венчиком для взбивания
Устройство управления абляцией для мониторинга в реальном времени смещения ткани в ответ на приложенную силу
Бутылочка, обеспечивающая безопасную температуру
Направляющая система для биопсии с ультразвуковым преобразователем и способ ее использования
Система, способ и аппарат для инструктирования устройству входить в активный режим
Оконные жалюзи для сбора солнечной энергии с регулируемым положением
Система визуализации с массивом из множества детекторов
Ускоренное отображение поля b
Осветительное устройство
Детектор рентгеновского излучения для формирования фазово-контрастных изображений
Светоизлучающее устройство бокового действия с преобразованием длины волны
Эпилятор, имеющий приводимый массажирующий элемент
Набор изделий, которые являются пригодными для использования в процессе приготовления напитка
Беспроводное наблюдение за пациентом с использованием потоковой передачи медицинских данных с помощью связанного с телом соединения
Модульное осветительное устройство
Устройство вывода автостереоскопического изображения
Безопасное стартерное устройство
Квазистатическая установка с распределенными источниками для рентгеновской визуализации с высокой разрешающей способностью

