Результат интеллектуальной деятельности: СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области геофизики, в частности к способу и устройству гравиметрической съемки акватории, и может быть использовано для изучения гравитационного поля в Мировом океане в целях навигационно-гидрографического обеспечения флота и народного хозяйства.
Известен способ гравиметрической съемки акватории, включающий вождение съемочного судна по запланированным галсам, измерение при этом на съемочном судне ускорения силы тяжести гравиметром, определение широты и долготы места, пути и абсолютной скорости судна навигационным средством, вычисления по полученным данным искомого ускорения силы тяжести и геодезических координат в пунктах, расположенных вдоль съемочных галсов, и регистрацию их значений (Юзефович А.П., Огородова Л.В. Гравиметрия. - М.: Недра, 1980. - С. 160-164 [1]).
Известен морской гравиметр, выбранный в качестве прототипа заявленного устройства, содержащий функционально соединенные чувствительную систему, блок управления, вычислитель и регистратор [1].
Недостаток известных способа и устройства (морского гравиметра) заключается в том, что они не обеспечивают с требуемой точностью определения ускорения силы тяжести на движущемся судне.
Это объясняется тем, что при их использовании имеет место существенная случайная погрешность измерения ускорения силы тяжести гравиметром, обусловленная на движущемся судне ускорениями воздействующих на чувствительную систему гравиметра, возникающих в результате качки, пульсаций скорости движения и раскачки судна, которые имеют место в условиях волнения моря, изменчивости скорости и направления течения воды и ветра. Данная погрешность может достигать 5-7 мГал (Строев П.А. Гравиметрические исследования в Тихом Океане во 2-м рейсе НИС «Морской геофизик». В сб.: Морские гравиметрические исследования. - М., 1982, - с. 70 [2]).
При использовании известного способа и устройства гравиметрической съемки акватории также имеют место систематические погрешности измерения ускорения силы тяжести, а именно:
Погрешность смещения нуль-пункта гравиметра, обусловленное, в основном остаточной деформацией чувствительного элемента гравиметра под воздействием нагрузки на него и изменения его температуры и градиента температуры, которая может достигать 2 мГал (Баландин В.Н. и др. Средства и методы топографической съемки шельфа. - М.: Недра, 1979. - С. 64 [3]);
Погрешность, обусловленная невозможностью с требуемой точностью в настоящее время определять поправку за эффект Этвеша. Погрешность определения поправки Этвеша достигает 6,8 мГал (Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - С. 145-179 [4]);
Погрешность, обусловленная искажением гравитационного поля Земли, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра у известных гравиметров [1] и скорости смещения гравитационного поля Земли, в котором движется судно с гравиметром, которое составляет 1,3 мГал при постоянной времени низкочастотного фильтра гравиметра 3 мин и 2,6 мГал при постоянной времени 6 мин (Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - С. 114 [5]).
Допустимая погрешность определения ускорения силы тяжести в океане по соответствующим координатными документами по гравиметрической съемке не должна превышать 1 мГал (Процаенко С.В. Корреляционный способ восстановления поля силы тяжести в океане. - Известия вузов. Геодезия и аэрофотосъемка, 1982, №3, с. 58-63 [6]).
Задачей заявляемого изобретения является повышение точности гравиметрической съемки акватории.
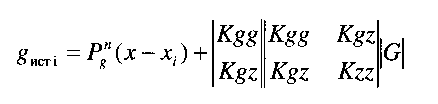
Поставленная задача достигается тем, что в способе гравиметрической съемки акватории и устройстве для его осуществления, включающем вождение судна по запланированным галсам, измерение при этом ускорения силы тяжести gизмi на съемочном судне гравиметром в пунктах, расположенных вдоль съемочных галсов, определение широты места φ и долготы λ, пути Π и абсолютной скорости судна υ навигационным комплексом, вычисление по полученным данным искомого ускорения силы тяжести gискi, вождение судна производят по запланированным галсам, начало и конец каждого из галсов замкнуты на опорный гидрографический пункт или на два гидрографических пункта: начало каждого галса - на один данный пункт, а конец каждого галса - на другой данный пункт, дополнительно измеряют на движущемся судне в пунктах, расположенных вдоль съемочных галсов, совместно с измерением ускорения силы тяжести gизмi глубину акватории Zизмi определяют геодезические прямоугольные координаты хi и уi, а истинное значение ускорения силы тяжести gистi вычисляют по формуле:

где Kgg, Kgz, Kzz - ковариационные матрицы значений ускорения силы тяжести, ускорений силы тяжести и глубины акватории, глубины акватории;
lGl - вектор столбца исходных данных
где Ν - число пунктов, расположенных на расстоянии, равном радиусу корреляции значений

gиск и zискi - искомое значение φ ускорения силы тяжести и глубины акватории соответственно в пунктах i-го галса с координатами xi, уi;
Δgэтвi - значение поправки за эффект Этвеша в пункте i;
Pn g(x-xi) и Pn z(x-xi) - алгебраические полиномы, коэффициенты которых вычисляются по методу наименьших квадратов из систем уравнений

n - число пунктов, измеренных на галсе.
Поправка за эффект Этвеша Δgэтв вычисляют по формуле [1]:

если Земля представлена в виде шара, или по формуле:
 (3)
(3)
если Земля представлена в виде земного эллипсоида, где в формулах (2) и (3)
ω - угловая скорость вращения Земли;
υН - абсолютная скорость движения судна-носителя гравиметра;
φ - широта места съемочного судна;
α - пункт съемочного судна;
R - радиус Земли;
α и е - большая полуось и эксцентриситет земного эллипсоида;
υН и υЕ - северная и восточная составляющие υН соответственно.
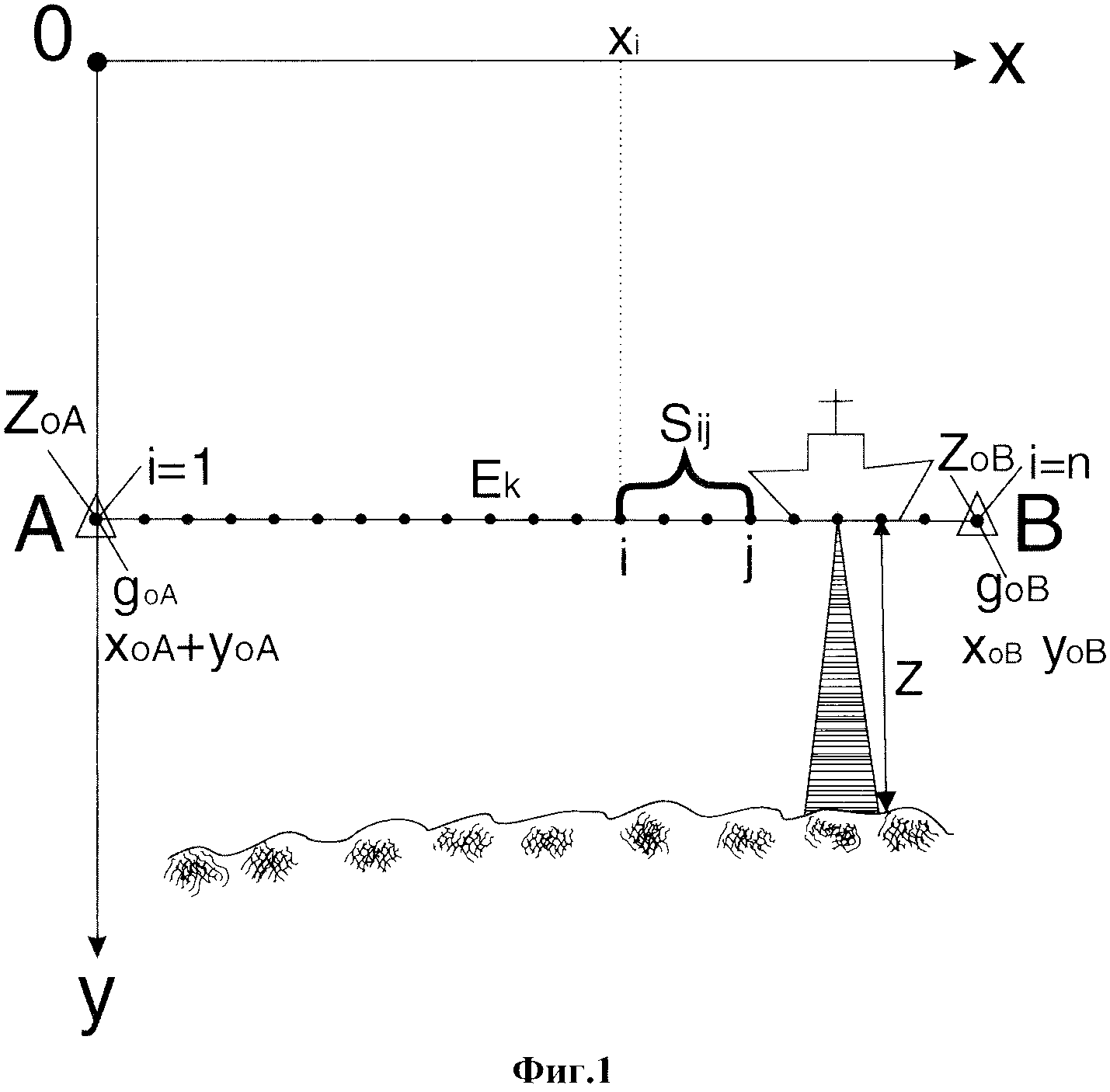
Определение искомых значений ускорения силы тяжести gискi и глубины акватории zискi в пунктах I галса с координатами хi и уi как видно из фиг. 1 и с учетом физико-математического смысла данного способа вычисляют по формулам:
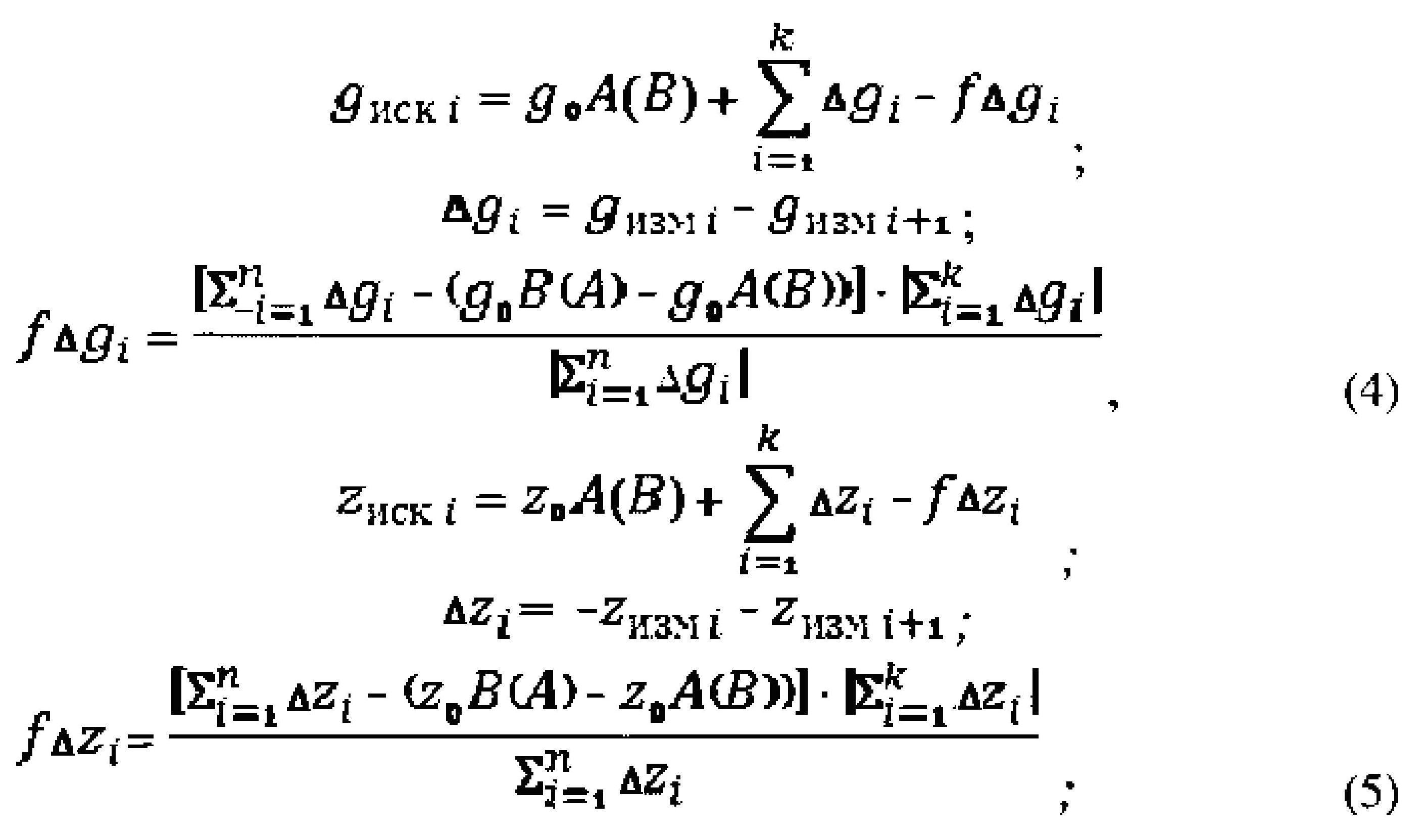
где i=1, 2, …, n - порядковый номер измеренных значений выбранных ускорений силы тяжести gизмi и глубины акватории gизмi в i-пунктах, расположенных на съемочном галсе;
goA, goB и zoA, zoB - эталонные значения ускорения силы тяжести и эталонные значения глубины акватории в местах расположения гидрографических пунктов А и В соответственно;
k, n - число выбранных значений ускорения силы тяжести и глубины акватории на отрезке съемочного галса, ограниченного опорными гидрографическими пунктами А и В и местом Ε и опорными гидрографическими пунктами А и В соответственно.
Анализ формул (4) и (5) показывает, что если принять гипотезу, что слагаемые под знаком сумм в правых частях не отягощены постоянными систематическими составляющими погрешностями, поскольку в приращениях данные погрешности практически исключаются. Следовательно погрешность определения gиск и zиск будут определяться погрешностями их определения на опорных гидрографических пунктах, которые определяются с требуемой точностью.
Поставленная задача достигается также тем, что устройство (гравиметр) для осуществления данного способа гравиметрической съемки акватории содержит чувствительную систему, блок управления, вычислитель, реализующий формулы (1), (2), (3), (4), (5), глубины акватории, навигационный комплекс и регистратор, при этом вход вычисляется через блок управления и соединен с выходами чувствительной системы, измеряются глубины и навигационного комплекса, а выход соединен с входом регистратора.
Пример осуществления заявленного способа.
На фиг. 1 cхематически изображен заявленный способ.
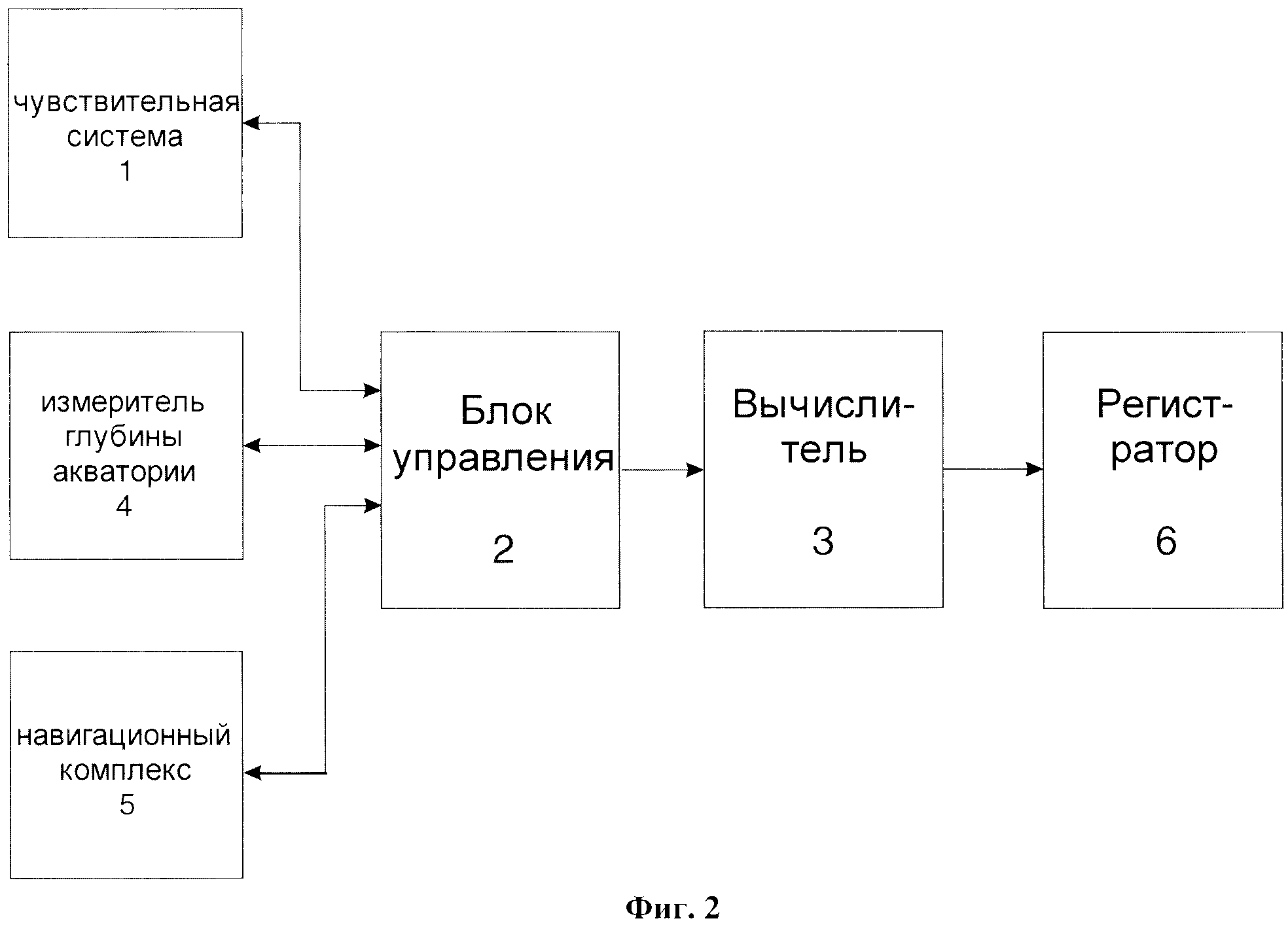
На фиг. 2 изображена структурная схема устройства для осуществления заявленного способа.
Заявленный способ гравиметрической съемки акватории, можно осуществить заявленным устройством, содержащим чувствительную систему 1, блок управления 2, вычислитель 3, измеритель глубины акватории 4, навигационное средство 5 и регистратор 6.
В качестве измерителя глубины 4 может быть использован известный эхолот ГЭЛ-3 или ПЭЛ-4 [3].
В качестве вычислителя 3 может быть использована универсальная вычислительная машина СМ-1420.
Гравиметрическую съемку акватории заявленным способом и устройством осуществляют следующим образом.
На движущемся судне 7 по заданному курсу по управляющим электрическим сигналам, формирующимся в блоке управления 2, чувствительная система 1 вырабатывает электрические сигналы, пропорциональные ускорению свободного падения, которые поступают в вычислитель 3. По управляющим электрическим сигналам, формирующимся в блоке управления 2, от измерителя глубины 4 поступают также в вычислитель 3 электрические сигналы, пропорциональные глубине акватории, а от навигационного комплекса объекта 5 - электрические сигналы, пропорциональные абсолютной скорости, пути и широте места судна - прямоугольные геодезические координаты х, у.
В вычислителе 3 по формуле (1) определяется искомое значение ускорения свободного падения, которое в виде электрического сигнала поступает в регистратор 5.
Формулу (1) возможно вывести следующим образом.
Результаты измерения гравиметром в море всегда содержат случайные погрешности. Для дальнейшего уменьшения погрешности необходима дополнительная информация о гравитационном поле Земли. Принимая во внимание то, что локальные аномалии силы тяжести на море обусловлены главным образом влиянием подводного рельефа [6], следствием чего является сильная корреляционная связь между аномалиями силы тяжести и рельефом (Лебедев С.В., Нейман Ю.М. Методика определения корреляционной функции гравитационного поля Земли для локальных участков. - Геодезия. Т. I/41, Новосибирск, 1977, с. 87-91 [7]), в качестве дополнительной информации предлагается использовать данные в рельефе в виде глубин, измеренных эхолотом.
Введем обозначение
где gискi и zискi - искомые значения ускорения силы тяжести и глубины акватории в пункте i;
gизмi и zизмi - измеренные значения ускорения силы тяжести и глубины акватории в пункте i;
Δgэтвi - поправка Этвеша в пункте i, вычисленная по формуле

где Vi, φi, Пi - абсолютная скорость, широта, путь движущегося судна в пункте i;
ω, R - скорость вращения и радиус Земли.
Представим исходные значения ускорения силы тяжести и глубины в пункте i на галсе в виде суммы низкочастотной и высокочастотной составляющих:
где индексы «н» и «в» соответствуют низкочастотным и высокочастотным составляющим.
Низкочастотные составляющие представлены в виде полиномов n-ой степени:
Значения коэффициентов полиномов вычисляются по методу наименьших квадратов из системы уравнений:
где n - число пунктов, измеренных на галсе.
В этом случае функции  допустимо трактовать как реализации однородного случайного процесса с нулевым математическим ожиданием. Учитывая, что данные измерений глубины предполагается использовать для уточнения данных о гравитационном поле земли, степень полинома n определяется из условия (Бузук В.В. Моделирование аномалий силы тяжести в неизученных районах Земли с определением высокочастотной части спектра гравитационного поля. - Астрономия и геодезия (Томск), 1979, №7 [8]):
допустимо трактовать как реализации однородного случайного процесса с нулевым математическим ожиданием. Учитывая, что данные измерений глубины предполагается использовать для уточнения данных о гравитационном поле земли, степень полинома n определяется из условия (Бузук В.В. Моделирование аномалий силы тяжести в неизученных районах Земли с определением высокочастотной части спектра гравитационного поля. - Астрономия и геодезия (Томск), 1979, №7 [8]):

где kgz(n) - коэффициент корреляции величин  и
и 
Представление высокочастотных составляющих исходных данных в виде реализаций однородных случайных последовательностей с нулевыми математическими ожиданиями позволяет использовать алгоритм коллокации для вычисления высокочастотных составляющих УСП с минимальной средней квадратической погрешностью (Мориц Г. Современная физическая геодезия. - Пер. с англ. - М.: Недра, http://1983.-c.65 [9]):

где G - вектор исходных данных;
В - ковариационная матрица исходных данных;
В-1 - матрица, обратная к матрице В;
А - ковариационная матрица исходных данных и искомого значения  .
.
Принимая во внимание, что в нашем случае искомые данные - высокочастотные составляющие ускорения силы тяжести и глубин, вектор G представляется в виде:

Матрицы А и В - блочные и имеют вид:
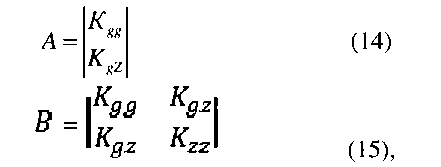
где Kgg, Kgz, Kzz - ковариационные матрицы ускорений силы тяжести, ускорений силы тяжести и глубин, глубин.
Для расчетов по формуле (12) целесообразно в качестве N принять число пунктов, расположенных на расстоянии, равном радиусу корреляции высокочастотных составляющих ускорения силы тяжести (Пеллинен Л.П., Нейман Ю.М. Физическая геодезия. - Геодезия и аэросъемка. Итоги науки и техники. - М.: ВИНИТИ, 1980, т. 18 [10]).
Элементы ковариационных матриц Kgg, Kgz, Kzz, стоящие на пересечении i-й строки и j-й строки и j-го столбца, рассчитываются по формулам (Мориц Г. Современная физическая геодезия. - Пер. с англ. - М.: Недра, 1983. - С. 66 [11]):
где Kg(Sij), Kz(Sij) и Kgz(Sij) - значения автокорреляционных функций ускорения силы тяжести, глубин и взаимно корреляционных функций ускорения силы тяжести и глубин при аргументе Sij, равном расстоянию между пунктами i и j, рассчитываемые по формулам (Вентцель Е.С. Теория вероятностей. - М.: Наука, 1962. - С. 74 [12]):
Таким образом, объединяя выражения (6)-(10), (12), (15), получаем формулу для определения истинного значения ускорения силы тяжести:

где

Оценку точности определения ускорения свободного падения заявленным способом и устройством возможно произвести следующим образом посредством математического моделирования.
Истинные (без погрешностей) значения ускорения силы тяжести и глубины на галсе (в прямоугольной системе координат XOY, см. фиг. 1) задавались функциями вида (Аронов В.И. Методы математической обработки геологических данных на ЭВМ. - М.: Недра, 1977. - С. 20 [13]):
где Ek, Bk, xk, yk, F, Qk, Rk, Mk,  фиксированные для каждой модели константы;
фиксированные для каждой модели константы;
 - среднее нормальное значение ускорения силы тяжести =9,8 м/с2.
- среднее нормальное значение ускорения силы тяжести =9,8 м/с2.
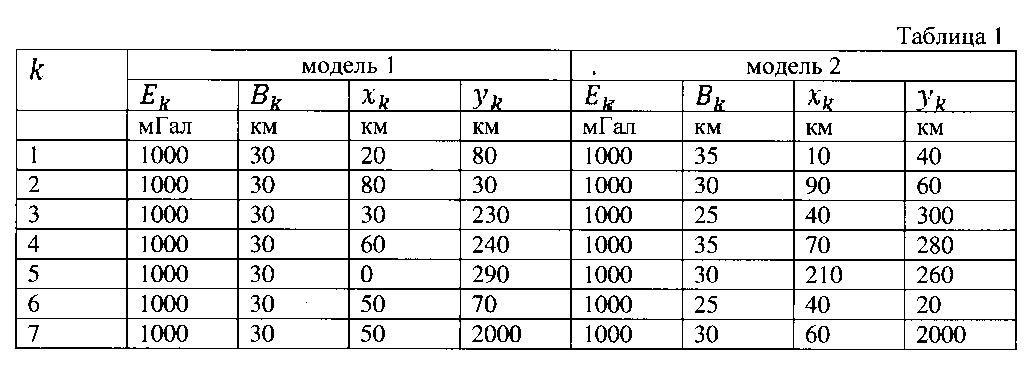
Для задания адекватных параметров модели ускорения силы тяжести по формуле (19) были рассчитаны автокорреляционные функции ускорения силы тяжести на галсах двух съемок, выполненных в открытом океане и на шельфе. Константы моделей Ek, Bk, xk, yk подбирались из условия совпадения автокорреляционных функций, рассчитанных по экспериментальным и по модельным данным, и приведены в табл. 1
Константы моделей F и Qk, Rk, Mk подбирались из требования выполнения условий
Первое из условий характеризует среднюю, второе - сильную корреляцию гравиметрических и батиметрических измерений в океане (Процаенко С.В., Конешов В.Н. К вопросу подготовки априорной информации для выполнения морской гравиметрической съемки. В кН.: Физико-техническая гравиметрия (аппаратура и методы измерений). - М.: ИФЗ АН СССР, 1982, с. 139-148 [14]).
Значение констант F и Qk, Rk, Mk, приведены в табл. 2 (F=1 км; Ζ=3 км).
Измеренные значения ускорения силы тяжести задавались выражениями
gизмi=gистi+σi,
где σi - погрешность измерений в пункте i, представляющая собой случайные нормально-распределенные числа с нулевым математическим ожиданием и средним квадратическим отклонением mизм=5 мГал.
Расстояние между пунктами на галсе принято равным радиусу корреляции ускорения силы тяжести, число пунктов на галсе Μ равно 20.
Для получения достаточной статистики, необходимой для оценки точности, вычисления проводились на 20 параллельных галсах, расположенных на расстоянии 16 км друг от друга, и средняя квадратическая погрешность рассчитанных по формуле (1) значений gi определялась по формуле

где j - номер галса, галс с номером j=1 совпадает с осью ОХ.
Результаты оценки точности приведены в таблице 3.
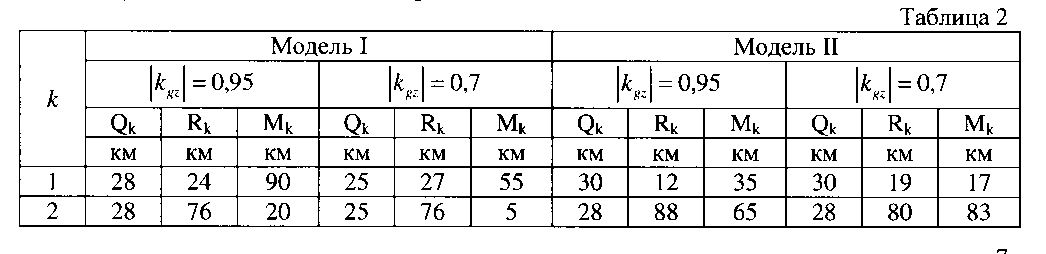
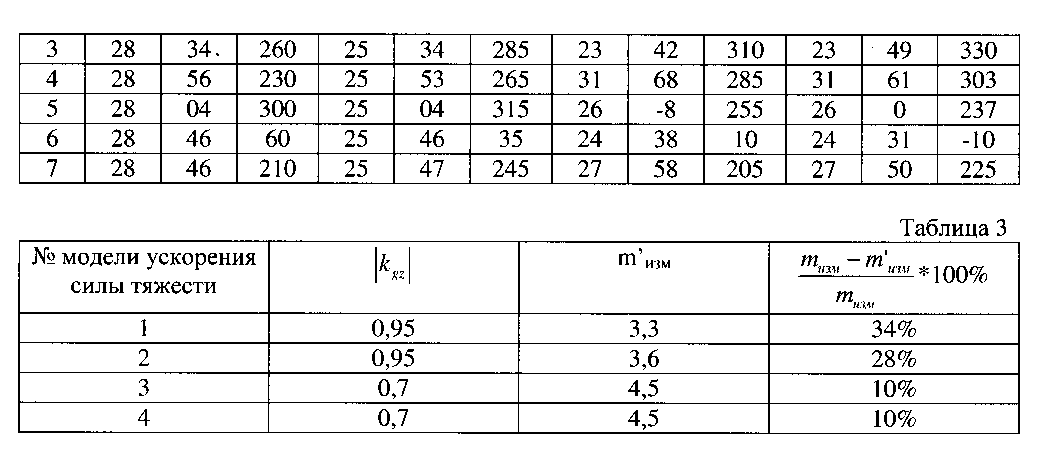
Использование заявленных способа и устройства позволяет по сравнению с существующими повысить точности определения ускорения свободного падения на движущемся объекте в море на 10% при средней (0,7) и на 30% при высокой (0,95) корреляции значений ускорения свободного падения и глубины моря.
Источники информации
1. Юзефович А.П., Огородова Л.В. Гравиметрия. - М.: Недра, 1980. - С. 160-164.
2. Строев П.А. Гравиметрические исследования в Тихом Океане во 2-м рейсе НИС «Морской геофизик». В сб.: Морские гравиметрические исследования. - М., 1982. - С. 70.
3. Баландин В.Н. и др. Средства и методы топографической съемки шельфа. - М.: Недра, 1979. - С. 64.
4. Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - С. 145-179.
5. Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983. - С. 114.
6. Процаенко С.В. Корреляционный способ восстановления поля силы тяжести в океане. - Изв. вузов. Геодезия и аэрофотосъемка, 1982, №3. С. 58-63.
7. Лебедев С.В., Нейман Ю.М. Методика определения корреляционной функции гравитационного поля Земли для локальных участков. - Геодезия. Т. I/41, Новосибирск, 1977. С. 87-91.
8. Бузук В.В. Моделирование аномалий силы тяжести в неизученных районах Земли с определением высокочастотной части спектра гравитационного поля. - Астрономия и геодезия (Томск), 1979, №7.
9. Мориц Г. Современная физическая геодезия. - Пер. с англ. - М.: Недра, 1983. - С. 65.
10. Пеллинен Л.П., Нейман Ю.М. Физическая геодезия. - Геодезия и аэросъемка. Итоги науки и техники. - М.: ВИНИТИ, 1980, т. 18.
11. Мориц Г. Современная физическая геодезия. - Пер. с англ. - М.: Недра, 1983. - с. 66.
12. Вентцель Е.С Теория вероятностей. - М.: Наука, 1962. - С. 74.
13. Аронов В.И. Методы математической обработки геологических данных на ЭВМ. - М.: Недра, 1977. - С. 20.
14. Процаенко С.В., Конешов В.Н. К вопросу подготовки априорной информации для выполнения морской гравиметрической съемки. В кН.: Физико-техническая гравиметрия (аппаратура и методы измерений). - М.: ИФЗ АН СССР, 1982, с. 139-1.







Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

