Результат интеллектуальной деятельности: ТЕХНОЛОГИИ ИЗМЕРЕНИЯ СИЛЫ И ДЕЙСТВИТЕЛЬНО ЕМКОСТНОГО КАСАНИЯ ДЛЯ ЕМКОСТНЫХ ДАТЧИКОВ КАСАНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Данное раскрытие относится к технологиям для измерения емкости в емкостных датчиков касания, например, при измерении силы и действительно емкостного касания одновременно в датчике.
Уровень техники
Датчики касания, к примеру, датчики, используемые в сенсорных экранах для портативных устройств и для мониторов, выполнены с возможностью определять изменения емкости, чтобы формировать электрические сигналы на основе определенных изменений и отправлять сформированные электрические сигналы в приемное устройство для последующей обработки.
Сущность изобретения
Это описание поясняет технологии, в общем связанные с датчиками касания, которые выполнены с возможностью измерять действительно емкостное касание и/или силу, приложенную к датчику пользователем.
В общем, некоторые аспекты изобретения, описанного в этом описании, могут быть осуществлены в способах, которые задействуют датчик. Другие варианты осуществления этого аспекта включают в себя соответствующие системы, аппаратуру и компьютерные программы, выполненные с возможностью осуществлять действия способов, кодированных на компьютерных устройствах хранения данных.
В общем, другой аспект изобретения, описанный в этом описании, может быть осуществлен в способах, которые включают в себя действия, связанные с емкостным датчиком касания. Датчик включает в себя первую матрицу (например, повторяющиеся линейные шаблоны или упорядоченную компоновку линий) проводников, размещаемых в строках, при этом проводники в первой матрице размещаются, по существу, параллельно друг другу. Датчик включает в себя вторую матрицу проводников, размещаемых в столбцах, при этом столбцы проводников во второй матрице размещаются, по существу, параллельно друг другу. Столбцы проводников во второй матрице находятся под первой матрицей проводников, и проводники во второй матрице размещаются в направлении, которое является, по существу, перпендикулярным направлению строк проводников в первой матрице. Датчик включает в себя лист, имеющий диэлектрический материал, при этом лист находится под второй матрицей проводников.
Датчик включает в себя площадку заземления, расположенную под листом. Первая и вторая матрицы выполнены с возможностью формировать электрическое поле с линиями напряженности электрического поля, которые идут в первом направлении к пользователю датчика и во втором направлении к площадке заземления.
Каждый из этих и других вариантов осуществления в необязательном порядке может включать в себя один или более из следующих признаков. Ширина проводников, измеряемая в одной строке в первой матрице, может быть меньше расстояния разнесения, измеряемого между смежными краями двух смежных строк первой матрицы, и ширина проводников, измеряемая в одном столбце во второй матрице, может быть меньше расстояния разнесения, измеряемого между смежными краями двух смежных столбцов во второй матрице. Площадка заземления может быть размещена с возможностью, по меньшей мере, частично обрывать некоторые линии напряженности электрического поля, идущие во втором направлении. Датчик может быть выполнен с возможностью определять прерывание в линиях напряженности электрического поля в первом направлении. Датчик может быть выполнен с возможностью определять прерывание линий напряженности электрического поля, возникающих в результате поднесения объекта, который размещается поблизости от датчика в линиях напряженности электрического поля первого направления. Объект может быть пальцем или некоторой другой частью тела пользователя датчика. Датчик может включать в себя передающие устройства и приемные устройства. Датчик может быть выполнен с возможностью осуществлять следующие операции: передачу, с помощью передающих устройств, сигналов, по меньшей мере, на двух различных частотах в первой или второй матрице проводников; прием, с помощью приемных устройств, сигналов, по меньшей мере, на двух различных частотах в другой из первой или второй матрицы проводников; оценку значения емкости на каждой из двух различных частот с использованием принимаемых сигналов; определение того, что объект является пальцем или некоторой другой частью тела пользователя, если оцененные значения емкости на двух частотах отличаются в два или более раз; и определение того, что объект не является объектом, допускающим формирование сигнала действительно емкостного касания (например, пальцем или некоторой другой частью человеческого тела), и активация датчика обусловлена измеренной силой, если оцененные значения емкости на двух частотах не отличаются в два или более раз. Датчик может быть выполнен с возможностью принимать внешнюю силу от касания или нажатия датчика. Датчик может быть выполнен с возможностью сжимать, по меньшей мере, проводники в первой и второй матрицах в направлении площадки заземления после приема внешней силы, и датчик также может быть выполнен с возможностью снижать емкость датчика, когда внешняя сила прикладывается к датчику. Датчик может включать в себя характеристику емкости, при которой уровень измеренной емкости снижается монотонно от момента, когда объект размещается поблизости от датчика, до момента, когда объект касается и нажимает датчик. Площадка заземления может включать в себя лист из оксида индия и олова (ITO) или прозрачного проводника. Площадка заземления может включать в себя провода или металл, сформированные на жидкокристаллическом дисплее (LCD). Датчик может иметь такую конфигурацию, в которой одно из площадки заземления и второго листа материала формируются под листом, имеющим диэлектрический материал, при этом второй лист материала имеет диэлектрическую постоянную, которая выше диэлектрической постоянной деформируемого диэлектрического материала. Датчик может иметь такую конфигурацию, в которой либо площадка заземления может формироваться под листом, имеющим деформируемый диэлектрический материал, либо второй лист материала может формироваться выше листа, имеющего деформируемый диэлектрический материал, для которого второй лист материала может иметь диэлектрическую постоянную, которая превышает диэлектрическую постоянную листа деформируемого диэлектрического материала. Датчик может включать в себя оксид индия и олова (ITO) на полиэфирном листе (PET). Датчик может иметь непрозрачные металлические трассы на полиэфирном листе (PET) или пластическом веществе. Проводники могут включать в себя прозрачный проводящий материал, размещаемый в шаблоне так, чтобы формировать краевое электрическое поле между первой и второй матрицей проводников. Строки и столбцы могут включать в себя ромбовидные шаблоны в непересекающихся местоположениях проводников первой и второй матриц. Проводники во второй матрице могут быть размещены между первой матрицей проводников и деформируемым диэлектриком, и деформируемый диэлектрик может быть размещен между проводниками во второй матрице и площадкой заземления.
В общем, другой аспект изобретения, описанный в этом описании, может быть осуществлен в способах, которые включают в себя действия, связанные с емкостным датчиком касания. Датчик включает в себя первую матрицу проводников, размещаемых в строках, причем строки проводников в первой матрице размещаются, по существу, параллельно друг другу, и ширина проводников, измеряемая в одной строке в первой матрице, меньше расстояния разнесения между соответствующими проводниками, измеряемого между смежными краями двух смежных строк первой матрицы. Датчик включает в себя вторую матрицу проводников, размещаемых в столбцах, причем столбцы проводников во второй матрице размещаются, по существу, параллельно друг другу, и причем проводники во второй матрице находятся под проводниками в первой матрице. Проводники во второй матрице размещаются в направлении, которое является, по существу, перпендикулярным направлению первой матрицы проводников, и ширина проводников, измеряемая в одном столбце во второй матрице, превышает расстояние разнесения между соответствующими проводниками, измеряемое между смежными краями двух смежных столбцов во второй матрице. Датчик включает в себя лист, имеющий диэлектрический материал, при этом лист находится под второй матрицей проводников. Датчик включает в себя третью матрицу проводников, размещаемых в строках, причем строки проводников в третьей матрице размещаются, по существу, параллельно друг другу, и проводники в третьей матрице находятся под листом. Строки проводников в третьей матрице размещаются в направлении, которое является, по существу, перпендикулярным направлению столбцов проводников во второй матрице, и ширина проводников, измеряемая в одной строке третьей матрицы, превышает расстояние разнесения между соответствующими проводниками, измеряемое между смежными краями двух смежных строк в третьей матрице.
Каждый из этих и других вариантов осуществления в необязательном порядке может включать в себя один или более из следующих признаков. Датчик может включать в себя чувствительный к силе датчик и датчик действительно емкостного касания, причем датчик действительно емкостного касания может включать в себя проводники первой и второй матриц, и чувствительный к силе датчик может включать в себя проводники второй и третьей матриц и лист, имеющий диэлектрический материал. Чувствительный к силе датчик может быть выполнен с возможностью первого измерения первой емкости для емкости параллельных пластин конденсатора между пересечениями проводников второй и третьей матриц, и датчик действительно емкостного касания может быть выполнен с возможностью второго измерения второй емкости, связанной с краевым электрическим полем между первой и второй матрицами проводников. Датчик может быть выполнен с возможностью определять то, находится или нет объект поблизости от касания датчика, посредством краевого электрического поля. Датчик может быть дополнительно выполнен с возможностью определять то, касается или прикладывает объект силу к датчику либо нет. Датчик может быть выполнен с возможностью снижать уровень второй емкости по мере того, как объект приближается к касанию датчика. Датчик может быть выполнен с возможностью повышать уровень первой емкости по мере того, как объект касается и прикладывает силу к датчику. Датчик может включать в себя оксид индия и олова (ITO) на полиэфирном листе (PET). Датчик может включать в себя непрозрачные металлические трассы на полиэфирном листе (PET) или пластическом веществе. Проводники могут включать в себя прозрачный проводящий материал, размещаемый в шаблоне так, чтобы формировать краевое электрическое поле между первой и второй матрицами проводников. Проводники во второй матрице могут быть размещены между первой матрицей проводников и деформируемым диэлектриком, и деформируемый диэлектрик может быть размещен между проводниками во второй матрице и третьей матрице проводников.
В общем, другой аспект изобретения, описанный в этом описании, может быть осуществлен в способах, которые включают в себя действия, связанные с емкостным датчиком касания. Датчик включает в себя первую матрицу проводников, размещаемых в строках, вторую матрицу проводников, размещаемых в столбцах, которые являются, по существу, перпендикулярными строкам проводников в первой матрице, по меньшей мере, одно передающее устройство, соединенное с проводниками в одной из первой и второй матрицы проводников, и, по меньшей мере, одно приемное устройство, соединенное с проводниками в другой из первой и второй матрицы проводников. Способ для проведения измерений в датчике заключает в себе передачу, с помощью, по меньшей мере, одного передающего устройства, сигналов, по меньшей мере, на двух различных частотах, которые формируют электрическое поле, по меньшей мере, между одним из проводников в первой матрице и, по меньшей мере, одним из проводников во второй матрице, причем первая и вторая матрицы выполнены с возможностью формировать краевое электрическое поле, которое идет в направлении к пользователю датчика, и предоставлять определение прерывания электрического поля, возникающего в результате объекта, который размещается поблизости от датчика. Способ заключает в себе прием, с помощью, по меньшей мере, одного приемного устройства, сигналов с двумя или более различными частотами, оценку значения емкости на каждой из двух или более различных частот с использованием принимаемых сигналов, и определение того, отличается или нет оцененное значение емкости на каждой из двух или более частот приблизительно в два или более раз. Способ заключает в себе вычисление соотношения между оцененными значениями емкости и сравнение соотношения с пороговым значением, причем пороговое значение содержит значение, которое равно приблизительно двум. Способ также может заключать в себе вычисление разности между оцененными значениями емкости и сравнение разности с пороговым значением. Способ заключает в себе определение того, допускает или нет объект формирование сигнала действительно емкостного касания (например, пальца или некоторой другой части человеческого тела), и того, обусловлена или нет активация датчика измеренной силой, на основе результатов сравнения соотношения или разности между оцененными значениями емкости на двух или более частотах. Каждый из этих и других вариантов осуществления в необязательном порядке может включать в себя один или более из следующих признаков. Способ может заключать в себе определение того, что объект является пальцем или некоторой другой частью человеческого тела пользователя датчика касания, если оцененные значения емкости на двух частотах отличаются приблизительно в два или более раз. Проводники в первой матрице могут размещаться, по существу, параллельно друг другу, и проводники во второй матрице могут размещаться, по существу, параллельно друг другу. Проводники во второй матрице могут находиться под проводниками в первой матрице. Ширина проводников, измеряемая в одной строке в первой матрице, может быть меньше расстояния разнесения между соответствующими проводниками, измеряемого между смежными краями двух смежных строк первой матрицы, и ширина проводников, измеряемая в одном столбце во вторая матрице, может быть меньше расстояния разнесения между соответствующими проводниками, измеряемого между смежными краями двух смежных столбцов во второй матрице. Датчик может включать в себя лист, имеющий диэлектрический материал, при этом лист может находиться под второй матрицей проводников; и датчик может включать в себя площадку заземления, расположенную под листом. Относительно частот, по меньшей мере, две различных частоты могут отличаться в соотношении приблизительно четыре к одному. Датчик может включать в себя датчик действительно емкостного касания. Датчик может включать в себя чувствительный к силе датчик и датчик действительно емкостного касания, причем датчик действительно емкостного касания может включать в себя проводники в первой и второй матрицах, и чувствительный к силе датчик может включать в себя проводники во второй матрице, проводники в третьей матрице и лист, имеющий диэлектрический материал. Проводники в первой матрице могут размещаться, по существу, параллельно друг другу. Ширина проводников, измеряемая в одной строке в первой матрице, может быть меньше расстояния разнесения между соответствующими проводниками, измеряемого между смежными краями двух смежных строк первой матрицы. Проводники во второй матрице могут размещаться, по существу, параллельно друг другу. Проводники во второй матрице могут находиться под проводниками первой матрицы. Ширина проводников, измеряемая в одном столбце во второй матрице, может превышать расстояние разнесения между соответствующими проводниками, измеряемое между смежными краями двух смежных столбцов во второй матрице. Лист может находиться под проводниками второй матрицы. Проводники третьей матрицы могут размещаться в строках, и проводники в третьей матрице могут размещаться, по существу, параллельно друг с другом. Проводники в третьей матрице могут находиться под листом. Проводники в третьей матрице могут размещаться в направлении, которое является, по существу, перпендикулярным направлению проводников во второй матрице, и ширина проводников, измеряемая в одной строке в третьей матрице, может превышать расстояние разнесения между соответствующими проводниками, измеряемое между смежными краями двух смежных строк в третьей матрице. Две различных частоты могут включать в себя первую частоту и вторую частоту, и первая частота может быть выше второй частоты. Способ также может включать в себя прием сигналов для второй частоты, по меньшей мере, в одном приемном устройстве, которые имеют более высокий ток, чем сигналы, принятые для первой частоты. Датчик может включать в себя оксид индия и олова (ITO) на полиэфирном листе (PET). Датчик может иметь непрозрачные металлические трассы на полиэфирном листе (PET) или пластическом веществе. Проводники могут иметь прозрачный проводящий материал, размещаемый в шаблоне так, чтобы формировать краевое электрическое поле между первой и второй матрицей проводников. Строки и столбцы могут иметь ромбовидные шаблоны в непересекающихся местоположениях проводников первой и второй матриц.
Подробности одного или более вариантов осуществления изобретения, описанного в этом подробном описании, изложены на прилагаемых чертежах и в нижеприведенном описании. Другие признаки и аспекты изобретения должны становиться очевидными из описания, чертежей и формулы изобретения.
Краткое описание чертежей
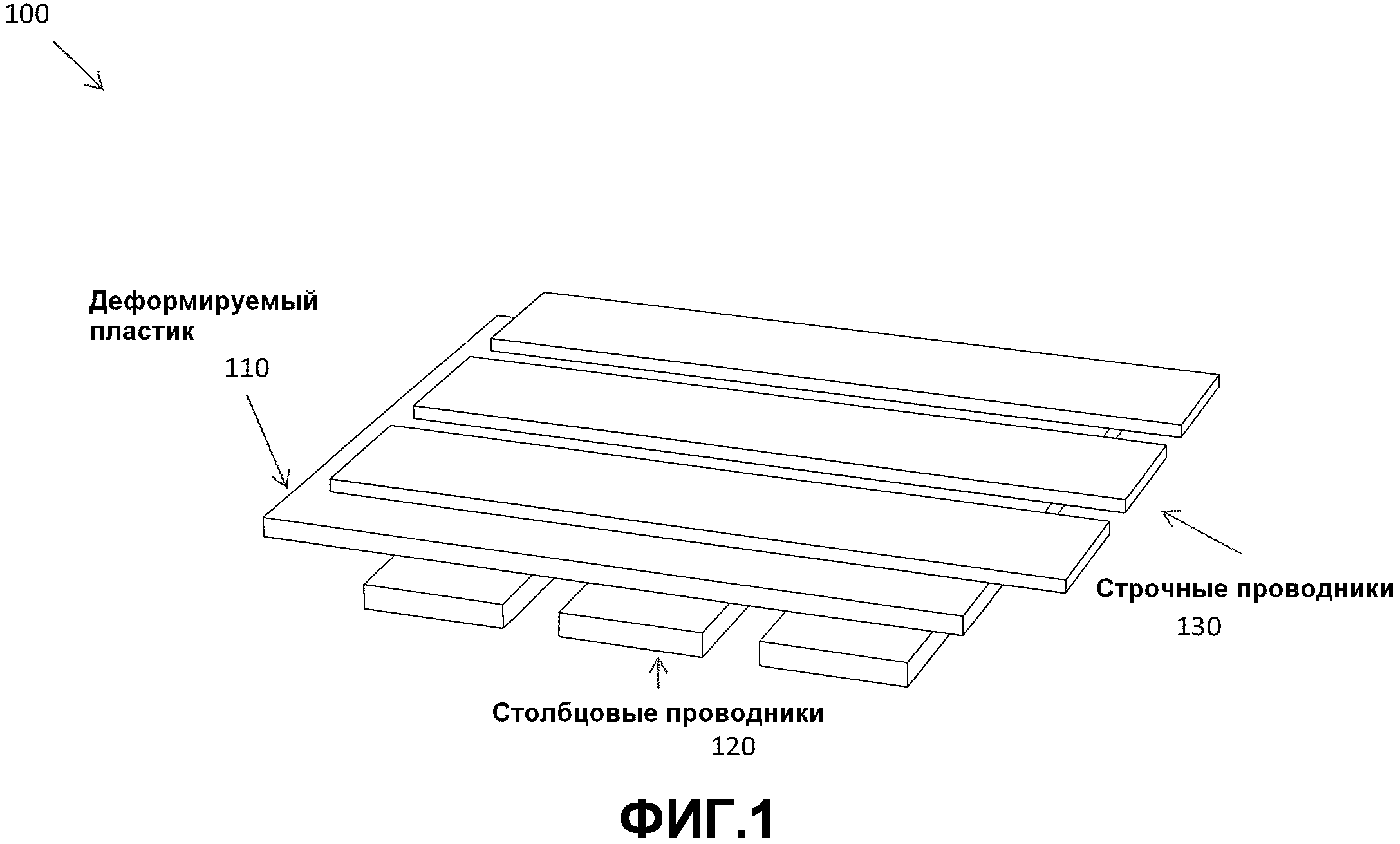
Фиг.1 иллюстрирует схему матрицы строк и столбцов для датчика касания.
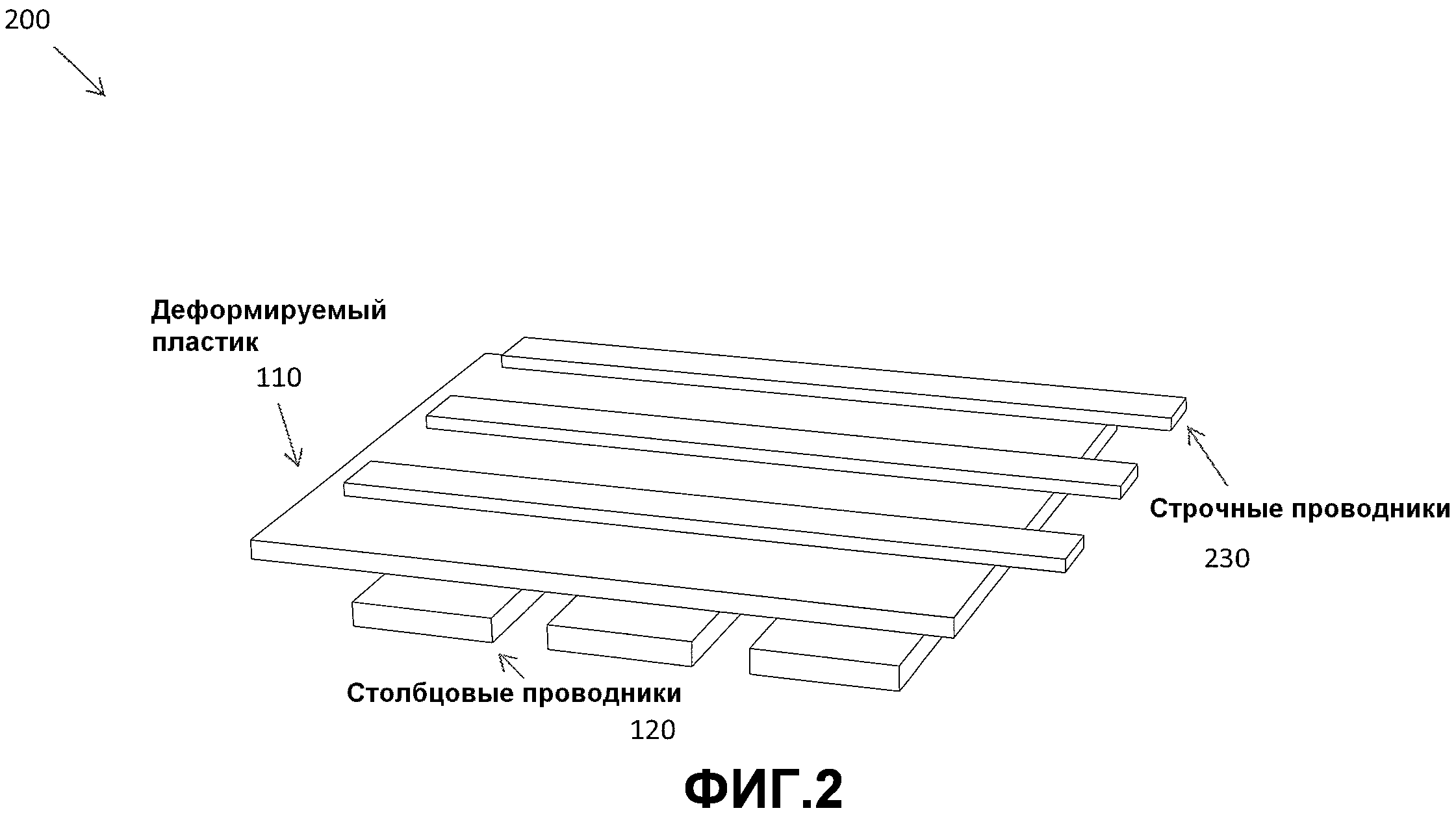
Фиг.2 иллюстрирует схему другого примера матрицы строк и столбцов для датчика касания.
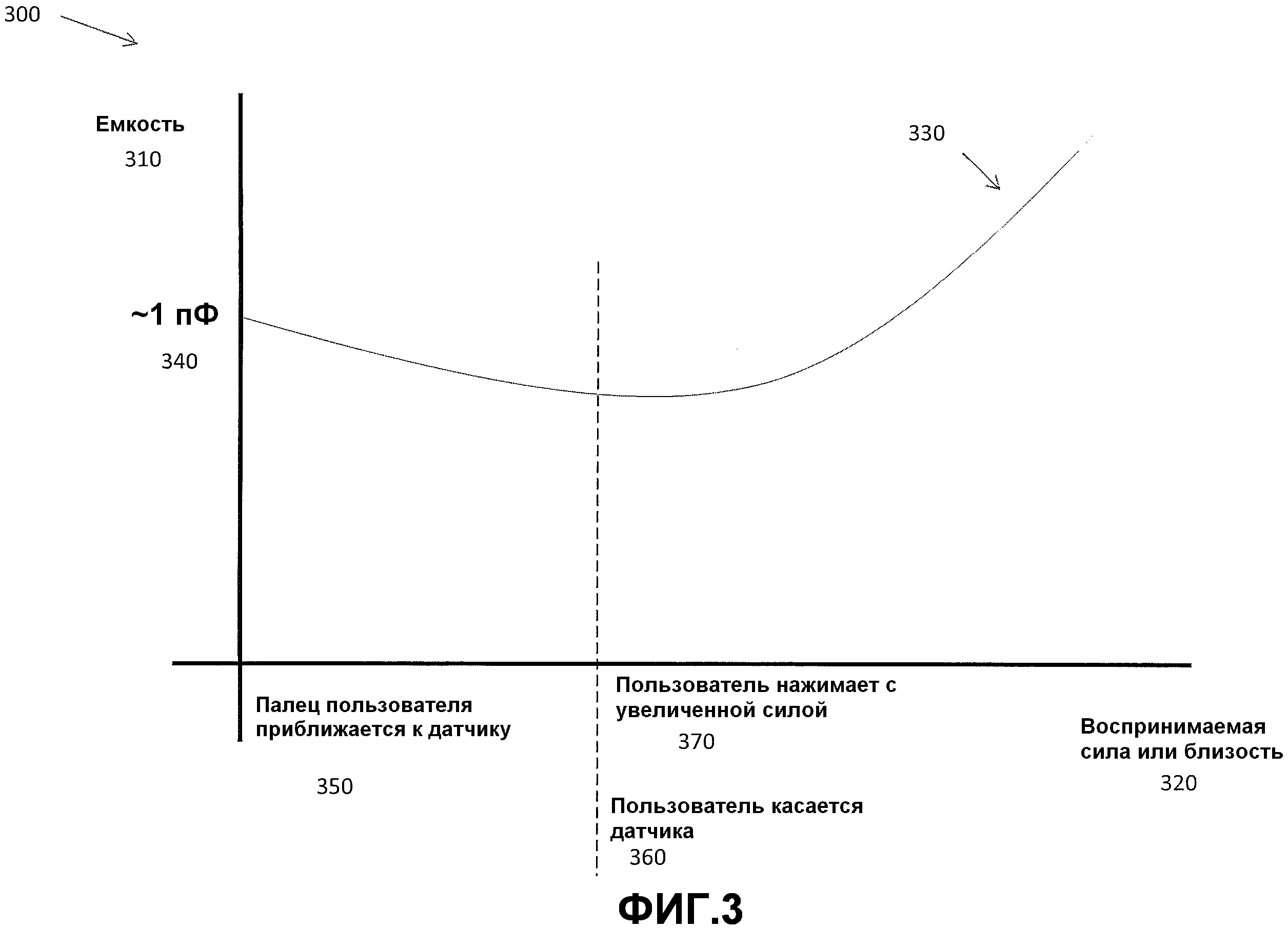
Фиг.3 иллюстрирует схему графика измеренной емкости в сравнении с воспринимаемой силой касания или сигналом приближения, принимаемым посредством датчика касания по фиг.2.
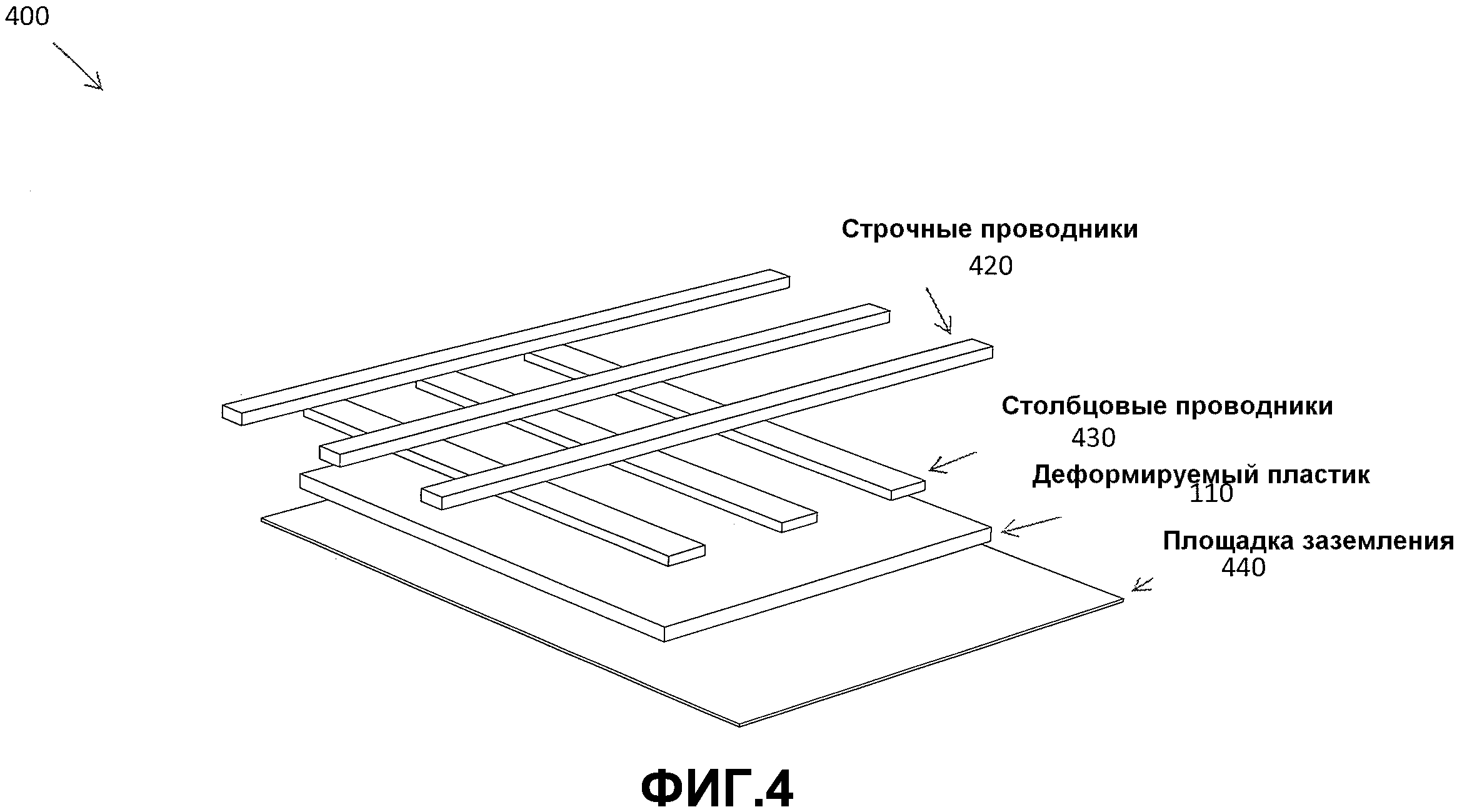
Фиг.4 иллюстрирует схему матрицы строк и столбцов для датчика касания.
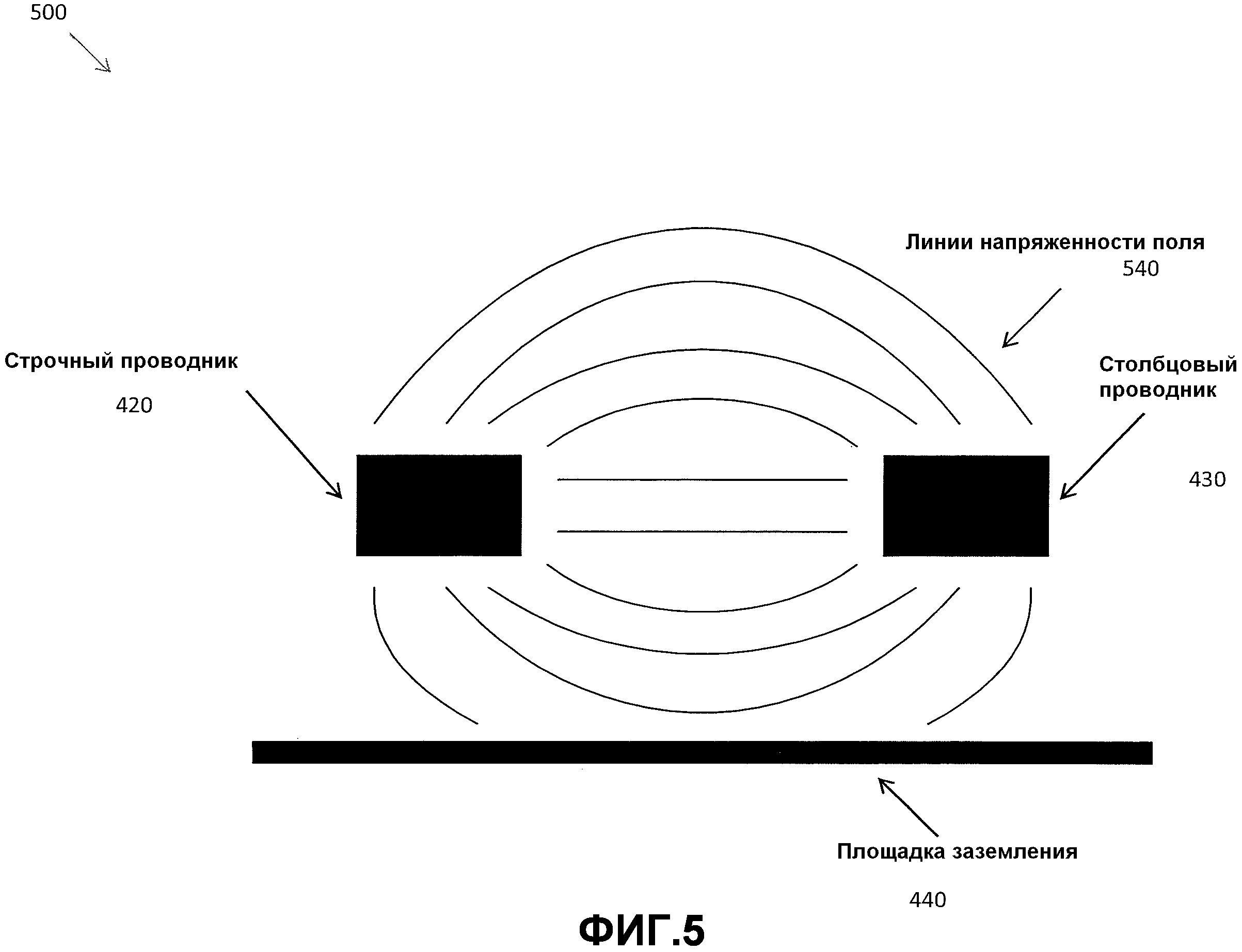
Фиг.5 иллюстрирует схему, иллюстрирующую краевые поля, которые существуют вокруг строки и столбца датчика касания по фиг.4.
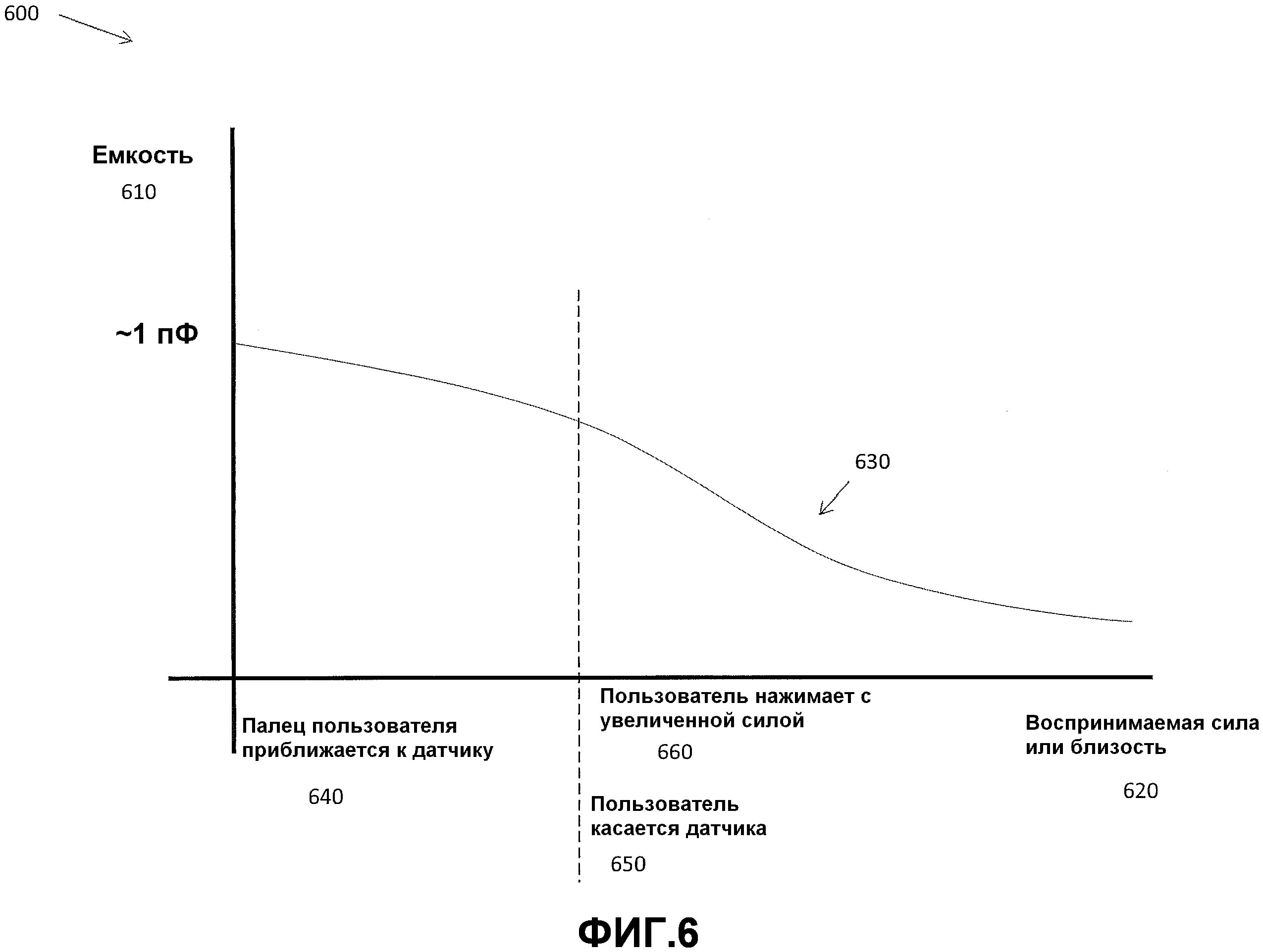
Фиг.6 иллюстрирует схему графика измеренной емкости в сравнении с воспринимаемой силой касания или сигналом приближения, принимаемым посредством датчика.
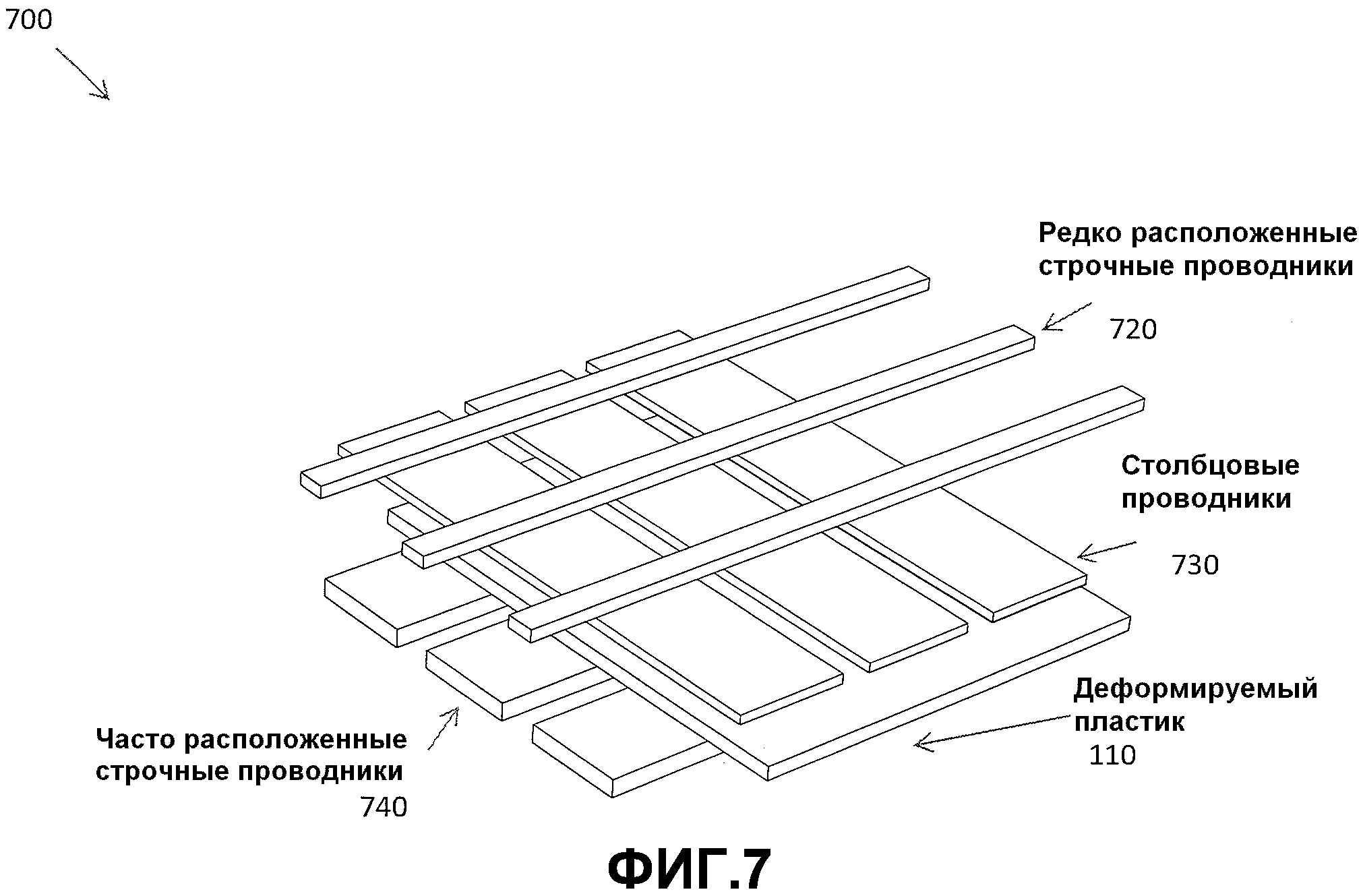
Фиг.7 иллюстрирует схему гибридного датчика касания.
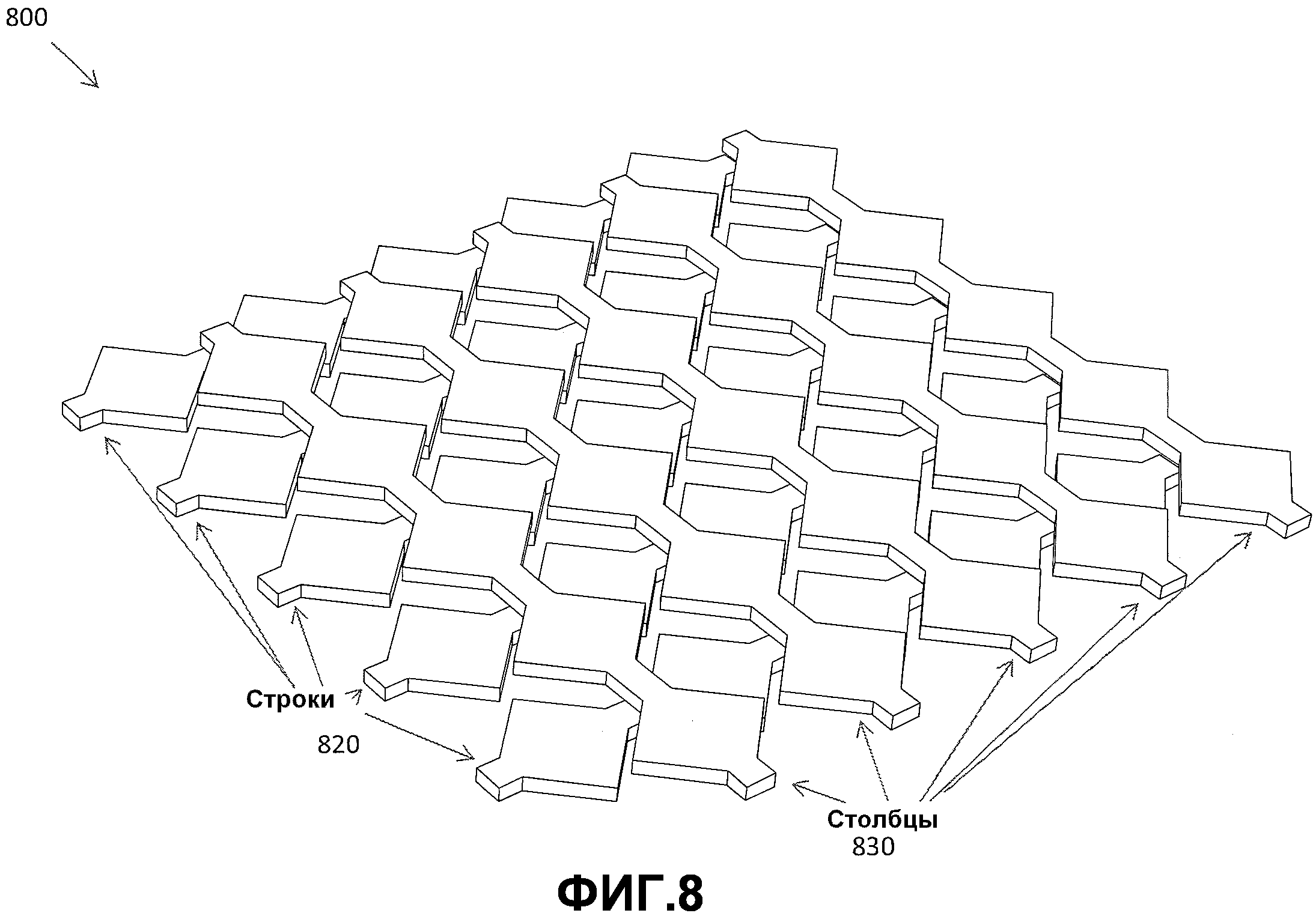
Фиг.8 иллюстрирует схему матрицы строк и столбцов для датчика касания, причем строки и столбцы имеют ромбический шаблон.
Аналогичные ссылки с номерами и обозначения на различных чертежах указывают аналогичные элементы.
Подробное описание изобретения
В емкостном сенсорном экране датчики изготавливаются из электропроводящих строк и столбцов, причем строки и столбцы являются подвижными, чтобы принимать силу, приложенную от пользователя датчика. Строки и столбцы пересекают друг друга приблизительно перпендикулярно и формируют двумерную матрицу. Электронный контроллер для такого сенсорного экрана должен измерять емкость от каждой строки к каждому столбцу в каждом пересечении, формируя m*n измерений для матрицы с m строк и n столбцов. Емкость измеряется посредством приложения изменяющегося во времени напряжения возбуждения в каждом проводнике (который произвольно допускается здесь как столбцовый) и измерения тока, образующего связь с каждой строкой. Несколько строк измеряются параллельно, и процесс повторяется последовательно для каждого столбца или частично параллельно с ортогональными формами сигналов возбуждения, используемыми в нескольких столбцах. Например, ортогональные формы сигналов возбуждения могут быть использованы в нескольких столбцах, как описано в заявке на патент (США) №12/838419, поданной 16 июля 2010 года, которая полностью содержится в данном документе по ссылке.
Если палец пользователя приближается к одному из пересечений, то емкость в этом пересечении будет изменяться. Палец пользователя является проводящим, имеет диэлектрическую постоянную, отличающуюся от диэлектрической постоянной воздуха, и в такой степени, в какой он является проводящим, имеет некоторое соединение через тело пользователя с узлом заземления схемы контроллера. Некоторая комбинация этих эффектов приводит к изменению емкости, которая может снижаться (по мере того, как ток протекает из передающего устройства в тело пользователя и на землю, а не из передающего устройства в приемное устройство) или возрастать (по мере того, как ток протекает из передающего устройства в палец пользователя и из пальца пользователя в приемное устройство; палец пользователя является более проводящим и имеет более высокую диэлектрическую постоянную, чем воздух). Режим, в котором палец пользователя приводит к снижению емкости, осуществляется на более высоких частотах, что обеспечивает передачу большей полной энергии в данном периоде интегрирования, что предоставляет возможность более высокого отношения "сигнал-шум" (SNR). Убывающий режим, следовательно, используется каждый раз, когда действительно емкостное касание измеряется в этом раскрытии сущности.
Измерение "действительно емкостного касания" используется, поскольку оно имеет нулевую силу воздействия. Оно реагирует на позицию касания пользователя, а не на силу, и, следовательно, реагирует даже на самое легкое касание. Тем не менее, в некоторых вариантах применения, аналоговое измерение силы касания пользователя предоставляет полезную дополнительную степень свободы.
Например, сила может преобразовываться в емкость посредством конструирования конденсатора с параллельными пластинами с деформируемым диэлектриком между пластинами. Когда сила прикладывается к конденсатору, диэлектрический материал деформируется и дает возможность пластинам сближаться друг с другом. Это повышает измеренную емкость. Матрица таких датчиков может быть сконструирована, например, с широкими, перекрывающимися строками и столбцами и диэлектрическим материалом между строками и столбцами. Эта матрица может быть отсканирована аналогичным образом для того, чтобы измерять действительно емкостное касание. Конструкции чувствительных к силе датчиков также дают возможность активации устройства с помощью объектов, отличных от пальца, к примеру, с помощью инструмента стилуса, например, твердого пластикового стержня. Все, что может быть использовано для того, чтобы прикладывать силу (в том числе, например, непроводящий пластический объект), может использоваться для предоставления сигнала, соответствующего силе датчика. Пример такого датчика воспроизведен в качестве фиг.1.
В матрице строк и столбцов для датчика 100 касания, показанного в фиг.1, датчик 100 касания включает в себя прозрачные электропроводящие строки и столбцы. Датчик 100 касания имеет строчные проводники 130, сформированные поверх деформируемого диэлектрика 110. Деформируемый диэлектрик 110 формируется поверх столбцовых проводников 120. Эти проводники могут быть изготовлены из оксида индия и олова (ITO), но также могут быть использованы другие материалы, к примеру, серебряные нанопровода или более крупные металлические провода, которые являются несильно или сильно непрозрачными, но являются достаточно небольшими, так что они относительно незаметны. Проиллюстрированная конфигурация дает в результате проводники, размещаемые в двумерной ортогональной матрице, например, когда строчные проводники являются, по существу, параллельным оси X, а столбцовые проводники являются, по существу, параллельным оси Y.
Датчик 100 касания включает в себя широкие столбцы и широкие строки, которые перекрываются, давая в результате емкость параллельных пластин конденсатора в областях перекрытия между строками и столбцами. На фиг.1 диэлектрик 110 является деформируемым, и строки и столбцы размещаются, например, на гибких фрагментах оксида индия и олова (ITO) на полиэфирном листе. Когда датчик 100 касания принимает силу, приложенную посредством внешней силы, к примеру, посредством пальца пользователя, диэлектрик 110 деформируется и снижает разнесение между строками и столбцами в нажатой области, приводя к повышению измеренной емкости этой области. Емкость матрицы строк и столбцов может считываться, чтобы измерять емкость в каждом m*n пересечений независимо. На фиг.1 электрическое поле находится в строке и столбцах, так что датчик главным образом реагирует на силу, приложенную к датчику. Сила может включать в себя физическое нажатие на датчик, возникающее в результате касания посредством пальца пользователя или посредством некоторого другого проводящего или непроводящего объекта, такого как инструмент стилуса или некоторый другой непроводящий объект.
В другой архитектуре, вместо измерения емкости от каждой строки к каждому столбцу, можно измерять емкость от каждой строки или столбца к земле. В системе, использующей эту конструкцию с m строк и n столбцов, выполняется m+n измерений, а не m*n. В этом случае, емкость параллельных пластин конденсатора будет возникать между строкой или столбцом и площадкой заземления, а не между строкой и столбцом. При приспособлении этой архитектуры, сила, которая прикладывается в нескольких точках, может формировать результат, который не является уникальным для местоположений, в которых прикладывается сила. Например, силы в позициях (1, 2) и (3, 4) формируют увеличенную емкость в строках 1 и 3 и столбцах 2 и 4; но силы в позициях (1, 4) и (3, 2) также формируют увеличенную емкость в идентичных строках и столбцах. Эвристические способы могут использоваться для того, чтобы после этого пытаться выбирать между конкурирующими потенциальными исходными местоположениями для инициирующей силы, например, посредством рассмотрения последовательности, в которой касаются точки. Тем не менее, m*n архитектур, поясненных ниже, не должны использовать эвристические способы для того, чтобы выбирать между конкурирующими потенциальными исходными местоположениями для инициирующей силы. Признаки, описанные ниже, могут предлагать m*n архитектур, которые предоставляют корректные результаты, когда две точки касаются почти одновременно, или когда точки перемещаются таким образом, что они располагаются по горизонтальной (параллельно строкам) или вертикальной (параллельно столбцам) линии.
На фиг.2 показан датчик 200 касания, имеющий матрицу строк и столбцов. Датчик 200 касания имеет прозрачные электропроводящие строки и столбцы. Датчик 200 касания имеет строчные проводники 230, размещенные поверх деформируемого диэлектрика 110. Деформируемый диэлектрик 110 размещается выше столбцовых проводников 120. По причинам, описанным ниже, датчик 200 касания по фиг.2 имеет относительно узкие строчные проводники 230 с относительно широкими промежутками между каждым из строчных проводников.
Конструкция по фиг.2 формирует как вышеуказанную емкость параллельных пластин конденсатора, так и краевую емкость, которая может прерываться посредством пальца пользователя. Такая конструкция измеряет как действительно емкостное касание из краевого поля, так и силу из емкости параллельных пластин конденсатора по мере того, как деформируется материал между строкой и столбцом. Такая конструкция ориентирует верхние проводники в относительно разбросанной взаимной ориентации с промежутком между ними, чтобы давать возможность полю образовывать интерференционную полосу по краям; пример этой конструкции отображается как фиг.2, но также предполагаются другие конструкции с этим свойством. Например, ромбический шаблон 800, как показано на фиг.8, может быть выполнен с возможностью иметь это свойство с использованием краевого поля между ромбами и емкости параллельных пластин конденсатора, когда строки 820 и столбцы 830 пересекают друг друга или образуют встречно-гребенчатый шаблон.
На фиг.2 строчные проводники 230 являются узкими, а не широкими, так что существует большое разнесение между строчными проводниками 230, чтобы уменьшать величину емкости параллельных пластин конденсатора между строчными проводниками 230 и столбцовыми проводниками 120 и давать возможность формирования краевого поля из строчных проводников 230, так что нарушение краевого поля может быть определено посредством датчика, чтобы предоставлять краевую емкость для сигнала касания (без силы). Аналогично фиг.2, могут быть сконфигурированы другие реализации, например, ромбический шаблон 800 на фиг.8 или встречно-гребенчатые шаблоны.
Как описано выше, датчик 200 касания по фиг.2 может служить в качестве как "датчика действительно емкостного касания", так и "чувствительного к силе датчика", соответственно, измеряя изменения краевого поля и электрического поля в диэлектрике. Например, в качестве чувствительного к силе датчика, датчик 200 касания работает аналогично датчику 100 касания по фиг.1, когда измеряется емкость параллельных пластин конденсатора, возникающая в результате из силы, приложенной к датчику касания, предоставляя дополнительную степень свободы. Например, с помощью пальца пользователя величина силы, приложенной пользователем для касания, может предоставлять дополнительную степень свободы, такую как легкое касание, чтобы указывать один тип инструкции, и более сильное касание, чтобы указывать другой тип инструкции. Конструкции чувствительных к силе датчиков также могут давать возможность активации датчика 200 касания с помощью объектов, отличных от пальца, к примеру, с помощью инструмента стилуса (например, твердого пластикового стержня либо любого проводящего или непроводящего объекта) для предоставления сигнала, соответствующего силе для датчика. Для приложенной силы с относительно небольшой контактной областью, например, сила может измеряться полностью в одном пересечении в матрице, и это измерение может быть пропорциональным приложенной силе. Для приложенной силы с относительно большой контактной областью, например, сила может измеряться в нескольких пересечениях в матрице, и эти измерения могут быть пропорциональными интегралу этой силы в области каждого конкретного пересечения, и, следовательно, приложенному давлению. В этом раскрытии сущности, термины для силы и давления могут быть использованы взаимозаменяемо. В некоторых реализациях, сигнал, сформированный посредством силы в датчике касания, может быть аналоговым измерением силы касания пользователя.
В отличие от этого и как указано выше, в режиме "датчика действительно емкостного касания", датчик 200 касания формирует измерения несмотря на отсутствие силы. В этом смысле, действительно емкостное касание измеряется посредством нарушения в электрическом поле, когда палец пользователя появляется поблизости или создает помехи для краевого поля датчика. Таким образом, сигнал действительно емкостного касания формируется в датчике 200 касания, даже если пользователь не прикладывает давление к датчику, поскольку измеримое изменение емкости может быть определено, когда палец пользователя появляется поблизости от краевого поля датчика. Поскольку пользователь не должен прикладывать силу, чтобы активировать датчик, результирующая сила трения отсутствует, если палец пользователя перемещается в плоскости датчика, и пользователь не чувствует это нежелательное сопротивление трения на пальце пользователя. Наоборот, датчик действительно емкостного касания может реагировать на позицию пальца пользователя, а не на силу, и, следовательно, может реагировать даже на самое легкое касание от пользователя.
На фиг.3 измеряемая емкость 310 связана с воспринимаемой силой касания на основе соответствующего сигнала 320 приближения, принимаемого посредством датчика 200 касания по фиг.2. В частности, как продемонстрировано посредством фиг.3, по мере того, как палец пользователя приближается к датчику 350 касания, приводя к постепенному снижению измеренной емкости 310, когда палец пользователя прерывает краевое поле от строки к столбцу. Емкость вследствие краевого поля является преобладающей емкостью в этом случае. После точки, в которой палец пользователя касается датчика 360 и начинает прикладывать возрастающую силу 370, емкость увеличивается по мере того, как емкость параллельных пластин конденсатора все больше и больше становится преобладающей емкостью. Это представляет немонотонную передаточную функцию из измерений воспринимаемой силы касания для емкости. Как следствие немонотонной передаточной функции, проиллюстрированной посредством фиг.3, пользователь, который касается и прижимается достаточно сильно к датчику касания, может увеличивать измеренную емкость параллельных пластин конденсатора до точки, в которой эта емкость параллельных пластин конденсатора смещает снижение измеренной емкости, соответствующее взаимодействию этого пользователя для эффектов краевой емкости и обеспечивающее результаты, которые совершенно запутывают то, касается пользователь или пытается прикоснуться к датчику.
Могут быть другие измерения, выполняемые в других реализациях датчиков касания. Например, в некоторых других реализациях, емкость может измеряться от каждой строки и столбца к земле, а не от каждой строки к каждому столбцу, тем самым проводя m+n измерений вместо m*n измерений. В этом случае, емкость параллельных пластин конденсатора будет возникать между строкой или столбцом и площадкой заземления, а не между строкой и столбцом. Некоторые из этих реализаций датчика касания, использующих m+n измерений, могут не иметь возможность независимо определять каждую силу (или их местоположения), когда сила прикладывается в нескольких точках, даже посредством использования сложного моделирования и вычислений.
Как упомянуто выше, когда пользователь касается емкостного датчика касания, наблюдаются, по меньшей мере, два различных эффекта. Во-первых, часть энергии, вытекающей из передающего устройства, может протекать в пользователя и возвращаться на землю через паразитную емкость пользователя для этого узла. Эта паразитная емкость может возникать, например, если пользователь держит металлический корпус устройства, даже из непроводящего покрытия, или в случае сбоя через палец пользователя, поскольку шаг датчика может быть достаточно точным, так что его палец также может находиться близко к другим элементам в матрице, в которой заземлены некоторые элементы. Этот первый эффект может снижать полную энергию, которая протекает в приемное устройство. Во-вторых, часть энергии, вытекающей из передающего устройства, может образовывать связь с пальцем пользователя через ткани пользователя и затем из пальца пользователя с приемным устройством. Поскольку диэлектрическая постоянная пальца пользователя, которая является приблизительно идентичной диэлектрической постоянной соленой воды, превышает диэлектрическую постоянную воздуха, это позволяет увеличивать эффект связи и увеличивать принимаемую энергию.
Эти два эффекта могут формировать различные реакции для потока энергии. Например, в зависимости от того, какой эффект преобладает, может быть немонотонная взаимосвязь между измеренным сигналом и расстоянием от пальца пользователя до датчика. Исходя из этого, чтобы повышать производительность датчика, датчики касания могут быть выполнены с возможностью работать в строго возрастающем или в строго убывающем режиме, так что они имеют монотонную взаимосвязь. Строго убывающий режим может демонстрировать особенно хорошую производительность в некоторых реализациях, поскольку этот режим может осуществляться на более высоких частотах. Эффекты, соответствующие строго убывающему режиму, также могут возникать с большим разнесением между пальцем пользователя и датчиком касания (поскольку, когда палец пользователя становится очень близко расположенным к датчику, эффект, в котором ток образует связь из передающего устройства с пальцем пользователя и затем через пользователя с приемным устройством, преобладает и приводит к увеличенной емкости). Это может обеспечивать большую толщину стекла для крышки датчика. Тем не менее, некоторые другие реализации могут использовать строго возрастающий режим. Как описано ниже, могут быть другие эффекты в отношении режима, которые являются функцией частоты.
Как проиллюстрировано посредством примера, показанного на фиг.4, в некоторых реализациях можно размещать датчик так, что на первую краевую емкость влияет сила, а на вторую и отличающуюся краевую емкость может влиять палец пользователя. Эта компоновка может достигаться с использованием шаблона электродов, который формирует значительное краевое поле как на передней (к пользователю), так и на задней (к дисплею) стороне датчика. Шаблон с узкими проводами может иметь это свойство, например, в качестве ромбического 800 шаблона (фиг.8) либо встречно-гребенчатого шаблона, либо других шаблонов. Датчик может включать в себя гибкий материал, например металлические или прозрачные проводящие (к примеру, из оксида индия и олова, ITO) трассы на полиэфирной (PET) или другой пластической пленочной подложке. Датчик может быть размещен над площадкой заземления, отделенной посредством деформируемого диэлектрического материала.
В частности, на фиг.4 существуют узкие строчные проводники 420 и узкие столбцовые проводники 430 с широкими промежутками между каждой из строк 420 и между каждым из столбцов 430. Датчик 400 касания включает в себя строчные проводники 420 выше столбцовых проводников 430. Ниже столбцовых проводников 430 находится деформируемый диэлектрик 110 с площадкой 440 заземления внизу. Столбцовые проводники 430 размещаются между строчными проводниками 420 и деформируемым диэлектриком 110, и деформируемый диэлектрик 100 размещается между столбцовыми проводниками 430 и площадкой 440 заземления. С перспективы, проиллюстрированной на фиг.4, строчные проводники 420 считаются находящимися поверх других слоев, показанных для датчика, а место 440 заземления считается находящимся под другими слоями, показанными для датчика. Преобладающая емкость на фиг.4 может быть краевой емкостью между соответствующими строками 420 и столбцами 430. Поскольку строки 420 и столбцы 430 могут быть примерно компланарными (например, разнесение между строками и столбцами является относительно небольшим), краевое поле может быть примерно симметричным.
Фиг.5 иллюстрирует примерные линии 540 напряженности краевого поля вокруг строчного проводника 420 и столбцового проводника 430 датчика 400 касания по фиг.4. На фиг.5 линии 540 напряженности краевого поля могут быть симметричными с обеих сторон строчного проводника 420 и столбцового проводника 430, причем на одной стороне линии 540 напряженности краевого поля выходят из датчика 400 касания к пользователю, а на другой стороне линии 540 напряженности краевого поля выходят в направлении от пользователя (например, на задней стороне и/или к дисплею). Краевое поле на передней стороне датчика касания может нарушаться посредством пальца пользователя и предоставлять сигнал действительно емкостного касания, который имеет тенденцию снижать измеренную емкость. Краевое поле на задней стороне датчика может быть использовано посредством деформируемого диэлектрика 110 и площадки 440 заземления. Если датчик касания прижимается с помощью непроводящего объекта, то проводники 420, 430 перемещаются к площадке 440 заземления, приводя к тому, что часть краевого поля на этой задней стороне датчика закорачивается или, по меньшей мере, частично обрывается посредством площадки 440 заземления. Ток, протекающий в передающее устройство, следовательно, протекает, по меньшей мере, частично в площадку 440 заземления, что немного снижает измеренную емкость относительно емкости, измеряемой в случае, если отсутствует эта площадка заземления.
На фиг.6 измеряемая емкость 610 связана с воспринимаемой силой касания на основе соответствующего сигнала 620 приближения, принимаемого посредством датчика касания. По мере того, как палец пользователя приближается к датчику 640 касания, снижается измеренная емкость 630. Когда пользователь начинает касаться датчика 650, емкость снижается, а когда палец пользователя прикладывается с увеличенной силой 660, емкость дополнительно снижается по мере того, как датчик приближается к площадке заземления.
В частности, если палец пользователя прижимается очень слабо, емкость снижается, поскольку ток, который вытекает из передающего устройства датчика, может протекать, по меньшей мере, частично через палец пользователя на землю, на основе, по меньшей мере, частичного соединения с землей схемы пользователя вместо протекания в приемное устройство датчика. Если палец пользователя прижимается с увеличенной силой, то измеренная емкость снижается еще больше, поскольку строки и столбцы датчика могут сближаться с площадкой заземления, что вызывает отдельный, но дополнительный эффект принудительного протекания части тока в площадку заземления вместо приемного устройства.
Измерение емкости, проиллюстрированное посредством фиг.6, следовательно, является монотонным относительно воспринимаемой силы касания пользователя. Монотонная характеристика емкости может давать возможность преобразования функции емкости в перемещение пальца пользователя и/или в измерение давления.
Технологии, использующие частоту, могут быть использованы для того, чтобы отличать между считыванием емкости, возникающей в результате пальца пользователя, и емкости, возникающей в результате силы, приложенной посредством некоторого другого объекта (например, инструмента стилуса, проводящего или непроводящего объекта). Например, емкость относительно пальца пользователя может меняться в зависимости от частоты, и емкость вследствие поля в деформируемом диэлектрике может оставаться приблизительно постоянной для частоты. Посредством оценки емкостных измерений на различных частотах, может быть выполнено определение в отношении того, касается датчик касания посредством пальца пользователя или непроводящего объекта.
Более конкретно, в случае касания пользователя предусмотрен ряд эффектов, которые могут быть использованы для проведения этого различения, чтобы определять считывание емкости, возникающей в результате пальца пользователя (в противоположность определению емкости, возникающей в результате силы, приложенной посредством некоторого другого объекта, такого как инструмент стилуса). Измеренное изменение емкости вследствие пальца пользователя может изменяться резко (например, в районе коэффициента в два или более) с изменением частоты в практическом диапазоне. Например, один эффект возникает в результате импеданса между пользователем и узлом заземления схемы контроллера, который не является нулевым, и на интересующих частотах может моделироваться в качестве емкости. Пользователь также может иметь емкостную связь с землей как результат нахождения поблизости заземленного сенсорного экрана. Пользователь может емкостно заземляться, например, через емкость ~100 пФ. В некоторых случаях, емкость может варьироваться значительным образом на коэффициент, по меньшей мере, от трех до единицы в любом направлении в зависимости, например, от того, стоит пользователь босиком на бетонном полу поверх металлического настила или в ботинках с толстой подошвой на полу, созданном из фанеры на сухих деревянных лагах. В первом приближении, связь пользователя с землей может моделироваться в качестве емкости. Таким образом, пользователь может быть эффективнее заземлен на более высоких частотах, чем на более низких частотах, по меньшей мере, поскольку емкостные импедансы имеют тенденцию снижаться с повышением частоты.
На более низких частотах пользователь может не быть заземлен настолько надежно. Если пользователь заземлен менее надежно, то вместо вытекания тока из передающего устройства, через палец пользователя и на землю, часть тока может вытекать из передающего устройства, через палец пользователя и затем обратно в приемное устройство, поскольку этот импедансный тракт меньше импедансного тракта к земле. В общем, это приводит к относительно небольшому увеличению емкости, которое комбинируется со сниженной емкостью, описанной выше, давая в результате меньшее чистое изменение. Поскольку диэлектрическая постоянная человеческих тканей примерно равна диэлектрической постоянной воды и тем самым превышает диэлектрическую постоянную свободного пространства, этот эффект может, вместо снижения в некоторых реализациях, приводить даже к увеличению измеренной емкости, когда присутствует палец пользователя.
Вследствие эффектов, измерения могут быть выполнены на различных частотах возбуждения, причем пользователь относительно хорошо заземлен на высоких частотах, давая в результате меньшую емкость, и пользователь не очень хорошо заземлен на более низких частотах, давая в результате большую емкость.
Для сигнала, чувствительного к силе датчика, емкость чувствительного к силе датчика относится больше к полю в диэлектрике датчика. Диэлектрическая постоянная деформируемого диэлектрика может быть принята во внимание в отношении частоты так, что может не быть большой для изменения емкости по частоте. Емкость в деформируемом диэлектрике может быть относительно идеальной при изменении не более чем на несколько процентов в целесообразном диапазоне частоты, например, для частотного диапазона приблизительно от 10 кГц до 1 МГц или более. В некоторых реализациях, материалы, выбранные для диэлектрика, могут иметь диэлектрическую проницаемость, которая не изменяется с частотой более чем на эту величину. Побочный эффект может наблюдаться вследствие сопротивления проводящих трасс, которое в комбинации с испытываемыми емкостями формирует частотно-избирательную резистивно-емкостную (RC) схему и изменяет измеренную емкость. Если известно сопротивление трасс, то этот RC-эффект может быть вычислен и скорректирован.
Некоторые технологии для того, чтобы отличать между действительно емкостным касанием и сигналом силы, могут заключать в себе измерение емкостей на двух частотах, так что если измеренные емкости на двух частотах достаточно сильно отличаются, то может быть допущение, что, вероятно, произошло касание пальцами, а если измеренные емкости на двух частотах достаточно близкие, то может быть допущение, что, вероятно, приложена сила из объекта (например, инструмента стилуса). Например, сигнал, сформированный вследствие силы, может отличаться от сигнала, сформированного вследствие действительно емкостного касания, посредством сканирования на двух широко разнесенных частотах (например, 30 кГц и 120 кГц), и при этом отметим, что первый из них не должен изменяться более чем на несколько десятков процента, а второй должен изменяться резко, например, в два или более раз. В некоторых реализациях, две различных частоты могут отличаться в соотношении приблизительно 4:1.
В некоторых реализациях, любой емкостный чувствительный к силе датчик m*n (емкость от строки к столбцу), в котором емкость измеряется на нескольких частотах, может быть использован для того, чтобы отличать действительно емкостное касание (вследствие тока через палец пользователя) от сигнала силы.
На фиг.7 гибридный датчик 700 касания имеет сильно разнесенные узкие строчные проводники 720 поверх широких столбцовых проводников 730. Столбцовые проводники 730 размещаются на деформируемом диэлектрике 110, и деформируемый диэлектрик 110 размещается на строчных проводниках 740.
Реализация по фиг.7 показывает пример реализации, в которой чувствительный к силе датчик размещается поверх датчика действительно емкостного касания. Узел действительно емкостного датчика по фиг.7 включает в себя узкие строчные проводники 720, которые широко разнесены друг от друга, которые располагаются поверх широких столбцовых проводников 730. Узел чувствительного к силе датчика по фиг.7 имеет широкие столбцовые проводники 730, размещенные поверх деформируемого диэлектрика 110, который размещается на широких строчных проводниках 740, причем широкие строчные проводники 740 являются часто расположенными. Узел чувствительного к силе датчика гибридного датчика 700 касания может быть использован для того, чтобы измерять силу между широкими столбцовыми проводниками 730 и строчными проводниками 740, и узел датчика действительно емкостного касания гибридного датчика 700 касания может быть использован для того, чтобы измерять краевые поля между строчными проводниками 720 и широкими столбцовыми проводниками 730. Широкие столбцовые проводники 730 совместно используются между чувствительным к силе датчиком и датчиком действительно емкостного касания. Может быть два отдельных измерения в каждом пересечении соответствующих строчных проводников 720, 740 и столбцовых проводников 730 для узлов чувствительного к силе датчика и датчика действительно емкостного касания гибридного датчика 700 касания.
В некоторых реализациях, гибридный датчик 700 касания является комплектом из часто расположенных строчных проводников 740 снизу, затем сжимаемого деформируемого диэлектрика 110 поверх строчных проводников 740, затем часто расположенных столбцовых проводников 730 поверх диэлектрика 110 и затем редко расположенных строчных проводников 720 поверх столбцовых проводников 730. Столбцовые проводники 730 размещаются между строчными проводниками 720 и деформируемым диэлектриком 100, и деформируемый диэлектрик 100 размещается между столбцовыми проводниками 730 и строчными проводниками 740. С перспективы, проиллюстрированной на фиг.7, строчные проводники 720 считаются находящимися поверх других слоев, показанных для датчика, и строчные проводники 740 считаются находящимися под другими слоями, показанными для датчика. Посредством измерения емкости параллельных пластин конденсатора от часто расположенных строк к часто расположенным столбцам может быть получено измерение силы, и посредством измерения краевой емкости от часто расположенных столбцов к редко расположенным строкам может быть получен сигнал действительно емкостного касания, причем касание пользователя может приводить к увеличению измеренной емкости при измерении силы и снижению измеренной емкости при измерении действительно емкостного касания.
Различные реализации, описанные выше, могут формироваться из одного или более материалов или технологий, описанных ниже. Например, диэлектрик может быть деформируемым и может быть, например, мягким пластическим материалом, мягким силиконом, эластомером или другим материалом, который имеет возможность восстанавливать свою форму, когда перестает действовать деформирующая сила. Мягкий пластический материал может выдавливаться из боков, когда он нажимается в области. Эти материалы, хотя и являются мягкими, могут не сжиматься особенно сильно (например, их объем может не изменяться значительно с приложенным давлением). Это может означать, что сокращение разнесения между пластинами может возникать в результате смещения объема диэлектрика, а не фактического снижения этого объема. Это может приводить, например, к образованию формы кольца вокруг нажатой области. Этот "эффект водяной кровати" может означать, что области сокращенного разнесения могут смещаться посредством области увеличенного разнесения, чтобы предоставлять объем для смещенного материала. Например, когда объем может сохраняться, когда прижимается диэлектрик, нажатая область может иметь сниженную толщину диэлектрика (например, сниженное разнесение между строчными и столбцовыми проводниками), и области вокруг нажатой области могут иметь повышенную толщину диэлектрика (например, повышенное разнесение между строчными и столбцовыми проводниками). Некоторые другие реализации могут иметь измененные на противоположное области повышенных или пониженных емкостей в зависимости от области и свойств. В некоторых реализациях, программное обеспечение может быть использовано для того, чтобы определять действительно емкостное касание, и программное обеспечение также может рассматривать нажатые области с формами кольца диэлектрического материала вокруг них, чтобы определять силу.
В некоторых реализациях, форма кольца увеличенной емкости вокруг точки сниженной емкости может быть использована для того, чтобы отличать сигнал, который возникает в результате силы, от сигнала, который возникает в результате действительно емкостного касания. Для некоторых из этих реализаций, датчик может быть емкостным чувствительным к силе датчиком m*n (емкость от строки к столбцу) с несжимаемым деформируемым диэлектриком.
В других реализациях, могут быть использованы диэлектрические материалы, которые изменяются в объеме, когда они нажимаются (например, пена, содержащая главным образом воздух или другой сжимаемый газ, при том, что остальная часть пены сформирована из гибкого материала). Другие реализации могут использовать разделительные точечные элементы. Воздух в воздушных зазорах может быть использован в качестве деформируемого диэлектрика, и сила касания может быть ограничена посредством жесткости датчика, а не жесткости диэлектрика. Воздушный зазор также является оптически прозрачным, и воздух в воздушном зазоре может сжиматься. Разделительные точечные элементы с воздушными зазорами могут быть аналогичными, например, элементам, используемым в резистивных сенсорных экранах. Поскольку воздух может иметь очень высокую степень сжатия, датчики касания, использующие разделительные точечные элементы, могут считывать очень незначительную силу, ограниченную только посредством жесткости слоев датчика.
В некоторых реализациях, площадка заземления может быть листом из ITO или другого прозрачного проводника. Например, датчик касания по фиг.4 может иметь площадку заземления в качестве листа из ITO, который может подключаться к земле схемы. Площадка заземления может не образовывать шаблон в некоторых реализациях, так что сопротивление между двумя точками в площадке заземления для данного сопротивления листа может быть меньше, чем когда лист образует шаблон способом из строк и столбцов. Такие площадки заземления могут быть использованы в других (жестких и не чувствительных к силе) системах, чтобы защищать датчик касания от электрического шума, формируемого посредством жидкокристаллического дисплея (LCD). Если датчик касания используется перед ЖК-дисплеем, то также можно использовать сам ЖК-дисплей в качестве площадки заземления. Например, в некоторых реализациях, во избежание добавления другого слоя (например, слоя заземления) к комплекту датчика касания, сам ЖК-дисплей может быть использован в качестве площадки заземления, которая может включать в себя алюминий или другие металлические провода на поверхности дисплея, который может моделироваться в качестве площадки заземления. Если ЖК-дисплей и датчик касания совместно используют землю схемы, то трассы на ЖК-дисплее могут рассматриваться как находящиеся в земле. LCD-трассы могут возбуждаться при некотором напряжении, имеющем как DC-компонент, так и AC-компонент, при этом DC-компонент может не учитываться, поскольку связь с площадкой заземления емкостная. AC-компонент может быть важным, по меньшей мере, поскольку он может вводить шум в принимаемый сигнал. Например, AC-компонент сигнала в металлических проводах может образовывать связь с приемным устройством, хотя это может исключаться при использовании некоторых технологий уменьшения уровня шума. Например, технологии уменьшения уровня шума могут использоваться для того, чтобы уменьшать эффекты связанного шума, к примеру, как описано в заявках на патент (США) номера 12/838419 и 12/838422, которые поданы 16 июля 2010 года и которые полностью содержатся в данном документе по ссылке.
В некоторых реализациях, площадка заземления может быть заменена посредством листа материала с высокой диэлектрической постоянной. Например, если деформируемый разделительный слой является пеной или воздухом с разделительными точечными элементами, то пластические материалы (например, сложный полиэфир или акриловый материал) могут иметь более высокую диэлектрическую постоянную. В этих вариантах реализации измеренная емкость может увеличиваться (вместо снижения) по мере того, как краевое поле проникает в материал с высокой диэлектрической постоянной. Поскольку поле не может быть экранировано посредством листа диэлектрика, эти варианты реализации могут давать возможность размещения листа диэлектрика либо за датчиком касания, как в некоторых реализациях площадки заземления, либо перед датчиком касания, в направлении пользователя.
В некоторых реализациях, емкости в этих системах могут быть выполнены с возможностью составлять порядка приблизительно 1 пФ по емкости. Большие емкости могут соответствовать более высоким уровням сигнала, но также могут вносить определенную долю в постоянную времени RC-цепи каждой емкости, испытываемый на сопротивление строчных и столбцовых проводников. Эта постоянная времени RC-цепи может иметь такую конфигурацию, при которой работа системы не является медленной по сравнению с частотой напряжения возбуждения, и сигнал возбуждения не ослабляется вдоль проводящих трасс и не формирует большую (и пространственно варьирующуюся) ошибку при измерении. Для датчиков, сконструированных с использованием ITO, например, с сопротивлением листа приблизительно в 50 Ом в расчете на единицу площади, емкость может составлять примерно ~1 пФ. Для датчиков, изготовленных из материалов с более низким сопротивлением, например из тонких металлических проводов, может быть оптимально использовано большее значение емкости (больше ~1 пФ).
Когда зависимая от силы емкость является емкостью параллельных пластин конденсатора, как в датчиках касания по фиг.1, 2 или 7, значение емкости может аппроксимироваться как C=эпсилон*A/d, где A является площадью конденсатора (немного меньше квадрата шага матрицы), d является разнесением между строчными и столбцовыми проводниками, и эпсилон является диэлектрической проницаемостью диэлектрического материала. Следовательно, значение емкости C может быть определено в качестве функции от толщины деформируемого диэлектрического материала. Матрица может иметь шаг, например, приблизительно в 5 мм, который соответствует приблизительному размеру контакта с пальцами. Это может означать, что разнесение между 0,1 мм и 1 мм может формировать емкость ~1 пФ. Более точная оценка значения емкости может зависеть от шага матрицы, который определяет площадь пластин, и от относительной диэлектрической проницаемости деформируемого материала, которая может быть очень близкой к единице для воздуха с разделительными точечными элементами или к трем-четырем для эластомеров.
Когда зависимая от силы емкость является краевой емкостью, как описано относительно фиг.4, например, могут быть другие способы аппроксимировать значения емкости, помимо простого выражения в аналитической форме, чтобы аппроксимировать это значение емкости. Расстояние в плоскости между строчными и столбцовыми проводниками может определять расстояние, нормальное к этой плоскости, на которое идет поле. Например, для сетки тонких проводов, разнесенных на 2 мм, значительная часть поля может выходить приблизительно на ~2 мм. Это может означать, что по мере того, как слои датчика приближаются к этой площадке заземления, площадка заземления может начинать значительно влиять на емкость в районе расстояния 2 мм. Следовательно, толщина деформируемого диэлектрика может быть выполнена с возможностью иметь данный порядок (например, приблизительно между 0,2 мм и 2 мм).
Датчик касания может быть изготовлен на любом числе гибких, непроводящих подложек. Один такой материал включает в себя полиэфирный (PET) лист. Например, датчик касания может быть изготовлен из верхнего листа со строчными проводниками, приклеиваемого к нижнему листу со столбцовыми проводниками. В некоторых реализациях, два листа могут склеиваться с использованием прозрачного чувствительного к давлению клея (например, продукта под названием "оптически видимый клей" (OCA) компании 3M™ St. Paul, Minnesota) или с использованием жидкого клея с отверждением ультрафиолетовым излучением. В некоторых реализациях, проводящие строчные и столбцовые проводники могут формироваться с использованием широких трасс ITO или другого прозрачного проводящего материала. В некоторых реализациях, поскольку удельное сопротивление этих материалов может быть высоким, чтобы достигать приемлемого сопротивления, трассы могут быть выполнены с возможностью быть широкими, порядка, по меньшей мере, ~1 мм. Разнесение между строчными и столбцовыми проводниками может быть выбрано так, что емкость параллельных пластин конденсатора, когда трассы перекрываются, не становится слишком большой и ограничивает частоту возбуждения посредством увеличения постоянной времени линий. На практике это может соответствовать разнесению, например, приблизительно в ~0,1 мм.
В некоторых реализациях, строчные и столбцовые проводники также могут формироваться с использованием непрозрачных металлических проводов, которые являются достаточно узкими (~10 мкм), так что они незаметны. В этом случае, компонент емкости параллельных пластин конденсатора может быть пренебрежимо мал, и два листа могут быть размещены максимально близко друг к другу в соответствии с механической практичностью. Когда строчные и столбцовые проводники изготавливаются из узких металлических проводов, может быть сконфигурирован шаблон, в котором строчные и столбцовые проводники пересекают друг друга несколько раз для каждой точки в матрице. Например, каждый строчный и каждый столбцовый проводник могут иметь три отдельных провода, которые электрически соединяются между собой. Это может означать, например, что для каждой точки в матрице провода могут пересекать друг друга 3*3=9 раз. Это может иметь эффект увеличения полной емкости и снижения расстояния, на которое краевое поле выходит из датчика касания (и тем самым снижения надлежащей толщины для деформируемого диэлектрика).
В некоторых реализациях, разнесение датчика и площадки заземления может составлять приблизительно ~1 мм. Разнесение строчных и столбцовых проводников может зависеть от геометрии шаблона и может быть, при аппроксимации первого порядка, примерно копланарным. В некоторых реализациях, строчные проводники, используемые для верхнего слоя емкостного датчика касания, могут формироваться достаточно узкими, так что они составляют приблизительно 6 мкм, так что емкость параллельных пластин конденсатора в областях ниже этих узких строчных проводников пренебрежимо мала, и разнесение между этими узкими строчными проводниками и нижележащим столбцовым проводником может быть задано небольшим. Если, например, используется ITO, то может быть разнесение примерно в ~0,1 мм между строчными проводниками и нижележащими столбцовыми проводниками.
В некоторых реализациях, редко расположенные строчные проводники могут образовывать шаблон из тонкой пленки (например, приблизительно сотни нанометров ITO) поверх полиэфирной подложки (например, в районе ~0,1 мм по толщине). Столбцы могут быть изготовлены аналогичным образом. Строчные и столбцовые проводники могут приклеиваться друг к другу с помощью прозрачного клея.
В этом раскрытии описываются реализации, в которых измерение емкости проводится от каждой строки к каждому столбцу. Может быть схема, выполненная с возможностью осуществлять этот тип измерения, причем схема включает в себя передающие устройства и приемные устройства в соответствующих столбцах и строках. В реализации этой схемы, столбцы могут быть возбуждены с помощью напряжения в линии передачи электроэнергии таким образом, что энергия протекает из передающего устройства в столбцы, и приемное устройство может измерять ток в строках таким образом, что энергия вытекает из строк и в приемное устройство. Хотя обозначение одной оси в качестве строк и другой в качестве столбцов является, в общем, произвольным в этой реализации, строки, в общем, могут быть присоединены к приемным устройствам, а столбцы, в общем, могут быть присоединены к передающим устройствам.
В различных реализациях, проводники в датчике могут быть сконфигурированы в шаблоне, который увеличивает или максимизирует краевую емкость, которая может прерываться посредством пальца пользователя, чтобы предоставлять требуемый сигнал и минимизировать дополнительную емкость между строкой и столбцом (например, емкость параллельных пластин конденсатора), что позволяет обеспечивать постоянное смещение. Строки и столбцы в матрице могут быть почти компланарными, так что хотя площадь соответствующего конденсатора с параллельными пластинами является относительно небольшой, расстояние разнесения также является относительно небольшим, и его значение емкости может быть значительным. Шаблон электродов также может быть сконфигурирован таким образом, чтобы сделать ширину линии максимально возможно большой для данного шага, чтобы минимизировать сопротивление трасс, которое в противном случае может быть значительным, если используются датчики с большой площадью. Краевая емкость может быть максимизирована, например, посредством конструирования шаблона таким образом, что результирующая краевая емкость может быть задана максимально большой. В некоторых реализациях этих датчиков касания, нежелательная емкость параллельных пластин конденсатора уменьшается или минимизируется посредством задания проводящих трасс узкими там, где они пересекают друг друга, сопротивление может быть уменьшено и минимизировано посредством задания электродных трасс относительно широкими в других областях.
Другие реализации могут иметь другие конфигурации расположения проводников. В одной реализации, например, один шаблон может заключать в себе равномерно разнесенные прямые линии с шагом, идентичным шагу электрической матрицы, прямые линии с шагом пальца в электрической матрице, где смежные линии соединяются между собой в группах и встречно-гребенчатых шаблонах, чтобы увеличивать периметр между данной строкой и столбцом, чтобы увеличивать краевое поле.
Некоторые описанные варианты осуществления изобретения и операции могут быть реализованы в цифровой электронной схеме или в компьютерном программном обеспечении, микропрограммном обеспечении (firmware) или аппаратных средствах, включающих в себя конструкции, раскрытые в этом описании, и их конструктивные эквиваленты, либо в комбинациях одного или более из означенного. Варианты осуществления изобретения, описанного в этом описании, могут быть реализованы как одна или более компьютерных программ, т.е. один или более модулей компьютерных программных инструкций, кодированных на компьютерном носителе хранения данных для выполнения или управления работой аппаратуры обработки данных. Альтернативно или помимо этого, программные инструкции могут быть кодированы в искусственно сформированном распространяемом сигнале, например, в машиносформированном электрическом, оптическом или электромагнитном сигнале, который формируется с возможностью кодировать информацию для передачи в подходящую приемную аппаратную систему для выполнения посредством аппаратной системы обработки данных. Аппаратура обработки данных может включать в себя датчик, может составлять часть датчика, может составлять часть системы с датчиком, может быть интегрирована в систему и/или датчику, может составлять часть приемных устройств, передающих устройств, компонентов и/или логики, ассоциированной с датчиком или приемными устройствами и/или передающими устройствами, либо представлять собой любую комбинацию вышеозначенного. Компьютерный носитель данных может представлять собой или быть включен в машиночитаемое устройство хранения данных, подложку машиночитаемого устройства хранения данных, матрицу или запоминающее устройство с произвольным или последовательным доступом либо в комбинацию одного или более из означенного. Кроме того, в то время как компьютерный носитель данных не является распространяемым сигналом, компьютерный носитель данных может быть источником или назначением компьютерных программных инструкций, кодированных в искусственно сформированном распространяемом сигнале. Компьютерный носитель данных также может представлять собой или быть включен в один или более отдельных физических компонентов либо носителей (например, несколько CD, дисков или других устройств хранения данных).
Операции, поясненные в этом подробном описании, могут быть реализованы как операции, выполняемые посредством аппаратной системы обработки данных для данных, сохраненных на одном или более машиночитаемых устройствах хранения данных или принимаемых из других источников.
Различные аппаратные системы, устройства и машины для обработки данных могут быть использованы в качестве "аппаратуры обработки данных", включающей в себя в качестве примера программируемый процессор, компьютер, внутрикристальную систему либо несколько или комбинации вышеприведенного. Аппаратура может включать в себя логическую схему специального назначения, например, FPGA (программируемую пользователем вентильную матрицу) или ASIC (специализированную интегральную схему). Аппаратура также может включать в себя, в дополнение к аппаратным средствам, код, который создает среду выполнения для рассматриваемой компьютерной программы, например код, который составляет микропрограммное обеспечение процессора, стек протоколов, систему управления базами данных, операционную систему, межплатформенную среду выполнения, виртуальную машину или комбинацию одного или более из означенного. Аппаратура и среда выполнения могут реализовывать множество различных инфраструктур вычислительных моделей, таких как веб-службы, распределенные вычислительные и сетевые параллельные вычислительные инфраструктуры.
Компьютерная программа (также известная как программа, программное обеспечение, приложение, сценарий или код) может быть написана в любой форме языка программирования, включающего в себя компилируемые или интерпретируемые языки, декларативные или процедурные языки, и она может быть развернута в любой форме, в том числе в качестве автономной программы либо в качестве модуля, компонента, подпрограммы, объекта или другого модуля, подходящего для использования в вычислительном окружении. Компьютерная программа может (но не должна) соответствовать файлу в файловой системе. Программа может сохраняться в части файла, который хранит другие программы или данные (например, один или более сценариев, сохраняемых в документе на языке разметки), в одном файле, выделенном для рассматриваемой программы, или в нескольких координированных файлах (например, в файлах, которые сохраняют один или более модулей, подпрограмм либо частей кода). Компьютерная программа может быть развернута для исполнения на одном компьютере или на нескольких компьютерах, которые находятся на одном веб-узле или распределены по нескольким веб-узлам и соединены посредством сети связи.
Процессы и логические последовательности операций, поясненные в этом подробном описании, могут быть выполнены посредством одного или более программируемых процессоров, исполняющих одну или более компьютерных программ, чтобы выполнять действия посредством управления входными данными и формирования вывода. Процессы и логические последовательности операций также могут быть выполнены посредством (и аппаратная система также может быть реализована как) логической схемы специального назначения, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной схемы).
Процессоры, подходящие для исполнения компьютерной программы, включают в себя, в качестве примера, микропроцессоры общего и специального назначения и любой один или более процессоров любого вида цифрового компьютера. В общем, процессор принимает инструкции и данные из постоянного запоминающего устройства или оперативного запоминающего устройства, или из того и из другого. Существенными элементами компьютера являются процессор для выполнения действий в соответствии с инструкциями и одно или более запоминающих устройств для сохранения инструкций и данных. В общем, компьютер также должен включать в себя или функционально соединяться с возможностью принимать данные или передавать данные либо как принимать, так и передавать данные в одно или более устройств хранения данных большой емкости для сохранения данных, например, в магнитные, магнитооптические диски или оптические диски. Тем не менее, компьютер не должен обязательно иметь такие устройства. Кроме того, компьютер может встраиваться в другое устройство, например, в числе прочего, в мобильный телефон, персональное цифровое устройство (PDA), мобильный аудио- или видеопроигрыватель, игровую приставку или портативное устройство хранения данных (например, флэш-накопитель на основе универсальной последовательной шины (USB)). Устройства, подходящие для сохранения компьютерных программных инструкций и данных, включают в себя все формы энергонезависимого запоминающего устройства, носителей и запоминающих устройств, включающих в себя в качестве примера полупроводниковые запоминающие устройства, например, EPROM, EEPROM и устройства флэш-памяти; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и CD-ROM- и DVD-ROM-диски. Процессор и запоминающее устройство могут дополняться или включаться в логическую схему специального назначения.
Чтобы предоставлять взаимодействие с пользователем, варианты осуществления изобретения, описанного в этом подробном описании, могут быть реализованы на компьютере, имеющем устройство отображения, например монитор на CRT (электронно-лучевой трубке) или ЖК-дисплее (жидкокристаллическом дисплее), для отображения информации пользователю, и клавиатуру и указательное устройство, например мышь или шаровый манипулятор, посредством которого пользователь может предоставлять ввод в компьютер. Другие виды устройств также могут быть использованы для того, чтобы предоставлять взаимодействие с пользователем; например, обратная связь, предоставляемая пользователю, может быть любой формой сенсорной обратной связи, такой как визуальная обратная связь, акустическая обратная связь или тактильная обратная связь; и ввод от пользователя может быть принят в любой форме, включающей в себя акустический, речевой или тактильный ввод. Помимо этого, компьютер может взаимодействовать с пользователем посредством отправки документов и приема документов из устройства, которое используется пользователем; например, посредством отправки веб-страниц в веб-обозреватель на клиентском устройстве пользователя в ответ на запросы, принятые из веб-обозревателя.
Хотя это подробное описание содержит множество конкретных сведений по реализации, они должны истолковываться не как ограничения на объем изобретения или формулы изобретения, а, наоборот, как описания признаков, специфичных для конкретных вариантов осуществления конкретного изобретения. Определенные признаки, которые поясняются в этом подробном описании в контексте отдельных вариантов осуществления, также могут быть реализованы комбинированно в одном варианте осуществления. Наоборот, различные признаки, которые описываются в контексте одного варианта осуществления, также могут быть реализованы в нескольких вариантах осуществления по отдельности или в любой подходящей субкомбинации. Кроме того, хотя признаки могут описываться выше как работающие в определенных комбинациях и даже первоначально задаваться в формуле изобретения, по существу, один или более признаков из заявленной комбинации в некоторых случаях могут быть исключены из комбинации, и заявленная комбинация может быть направлена на субкомбинацию или на изменение субкомбинации.
Аналогично, хотя операции проиллюстрированы на чертежах в конкретном порядке, это не должно пониматься как требующее то, что такие операции должны выполняться в конкретном показанном порядке либо в последовательном порядке, или что все проиллюстрированные операции должны выполняться для того, достигать требуемых результатов. При определенных обстоятельствах может быть преимущественной многозадачная и параллельная обработка. Кроме того, разделение различных системных компонентов в вариантах осуществления, описанных выше, не должно пониматься как требующее такого разделения во всех вариантах осуществления, и следует понимать, что описанные программные компоненты и системы, в общем, могут интегрироваться в один программный продукт либо комплектоваться в несколько программных продуктов.
Таким образом, описаны конкретные варианты осуществления изобретения. Другие варианты осуществления находятся в пределах объема прилагаемой формулы изобретения. В некоторых случаях, действия, изложенные в формуле изобретения, могут выполняться в другом порядке и при этом достигать требуемых результатов. Помимо этого, процессы, проиллюстрированные на прилагаемых чертежах, не обязательно требуют конкретного показанного порядка или последовательного порядка для того, чтобы достигать требуемых результатов. В определенных реализациях, может быть полезной многозадачная и параллельная обработка.
Обнаружение касания на искривленной поверхности
Определение местоположения электростатического пера в пределах емкостного датчика касания
Система для электростатического пера в емкостном датчике касания
Емкостный датчик прикосновения, имеющий колебательные сигналы передачи с кодовым разделением и временным разделением
Емкостный датчик касания, имеющий корреляцию с приемником
Обнаружение касания на искривленной поверхности
Определение местоположения электростатического пера в пределах емкостного датчика касания
Система для электростатического пера в емкостном датчике касания
Емкостный датчик прикосновения, имеющий колебательные сигналы передачи с кодовым разделением и временным разделением
Емкостный датчик касания, имеющий корреляцию с приемником
Система отображения с линиями электростатической и радиосвязи

