Результат интеллектуальной деятельности: АМФИБИЙНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
Вид РИД
Изобретение
Изобретение относится к транспортному машиностроению и может быть использовано для передвижения плавающих танков, бронетранспортеров, БМП, вездеходов, других транспортных средств-амфибий, а также различных судов и подводных лодок.
Известен гусеничный движитель амфибии, содержащий корпус с двумя колесами, охваченными бесконечной гусеницей. Поперечное сечение упругой гусеницы выполнено в форме арки, разделенной равномерно по длине на герметичные отсеки с помощью упругих перегородок с выпуклой опорной поверхностью, на которых у основания установлены упоры, фиксирующие опорную поверхность упругой гусеницы в форме дуги окружности. При движении по твердой поверхности выпуклые части упругих перегородок улучшают сцепление с поверхностью, повышая проходимость, а при движении по воде - работают как лопасти, обеспечивая тягу (RU 2189321 С2, B60F 3/00, 20.09.2002).
Описанный гусеничный движитель амфибии рассчитан только для перемещения по суше и по поверхности воды, при этом он не способен работать под водой, поскольку выполняющие функцию лопастей перегородки, расположенные сверху вращающегося движителя, будут противодействовать перегородкам, расположенным снизу.
Известен гребной гусеничный движитель надводных и подводных кораблей, содержащий параллельные замкнутые цепи, состоящие из отдельных звеньев, шарнирно соединенных и штифтованных, позволяющих выгибаться цепям только в одну сторону по окружности шкива, взаимодействующих со шкивами ведущего и ведомого узла привода лопасти, ведущий, ведомый и промежуточные узлы привода со шкивами, прикрепленные к опоре с помощью подшипников качения. Движитель прикреплен по бортам надводных и подводных кораблей так, что продольные оси узлов привода перпендикулярны продольной оси судна, при этом на каждом отдельном звене параллельных замкнутых цепей имеется направляющая дугообразной формы, а лопасти, закрепленные на параллельных цепях, выполнены П-образной формы и герметично заварены для защиты от проникновения воды внутрь, узлы привода, имеющие в полости для упрочнения конструкции каркас, состоящий из ребер, герметично заварены для защиты от проникновения воды внутрь (RU 2384459 C1, В63Н 1/34, 20.03.2010).
Описанный гребной гусеничный движитель имеет довольно сложную конструкцию и не способен перемещаться по суше.
Наиболее близким аналогом является гребной гусеничный движитель для плавучего средства, содержащий ведущий и ведомый шкивы и гусеничную ленту с шарнирно закрепленными на ней гребными лопатками. Движитель снабжен взаимодействующими с одной из поверхностей лопаток направляющими, установленными на корпусе плавающего средства между ведущим и ведомым шкивами, а лопатки выполнены Г-образной формы и установлены на шарнирах ленты, оси которых проходят через угол лопаток. При переходе в верхнее положение и при изменении направления движения под действием встречного потока воды, обусловленного движением судна, лопатки убираются и занимают нерабочее положение, когда ветви лопаток не выходят за наружную плоскость замкнутой гибкой ленты, тем самым сведя до минимума гидродинамическое сопротивление (RU 2054360 C1, В63Н 1/34, 20.02.1996).
Недостатком наиболее близкого аналога является то, что при переходе лопатки из нерабочего положения в рабочее один из концов лопатки может упираться в направляющую, что в свою очередь может привести к износу элементов движителя и снизить эффективность его работы. Помимо этого описанный гребной гусеничный движитель предназначен только для надводных, полупогружных или подводных плавучих средств, и не предназначен для перемещения по суше.
Задачей предложенного изобретения является разработка надежного, простого в эксплуатации и конструктивно несложного амфибийного гусеничного движителя с широким диапазоном функциональных возможностей.
Техническим результатом предложенного изобретения является возможность движителя перемещаться по суше, по воде, под водой или же находясь частично в воде. Техническим результатом также является возможность реверсивного движения во всех перечисленных средах.
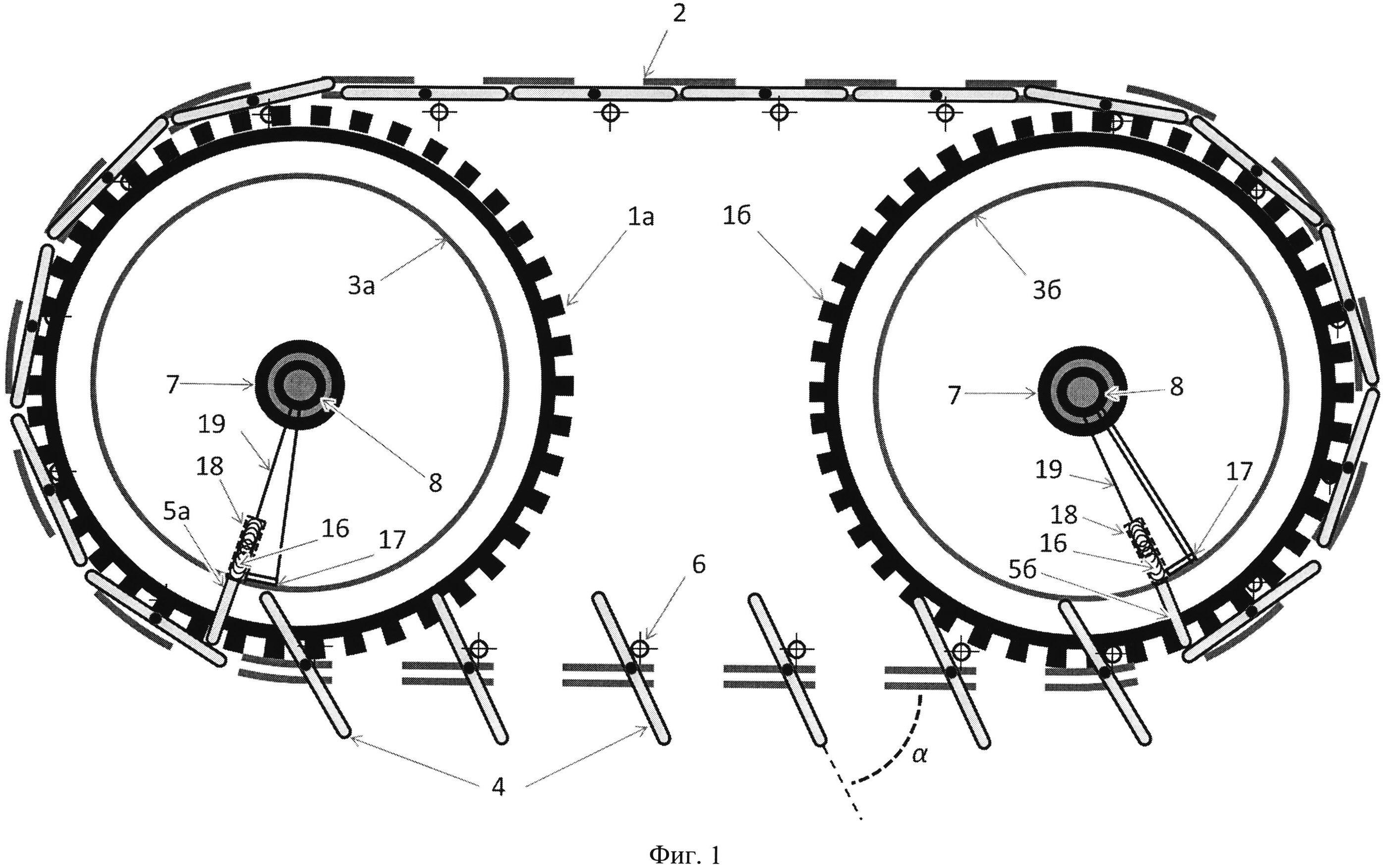
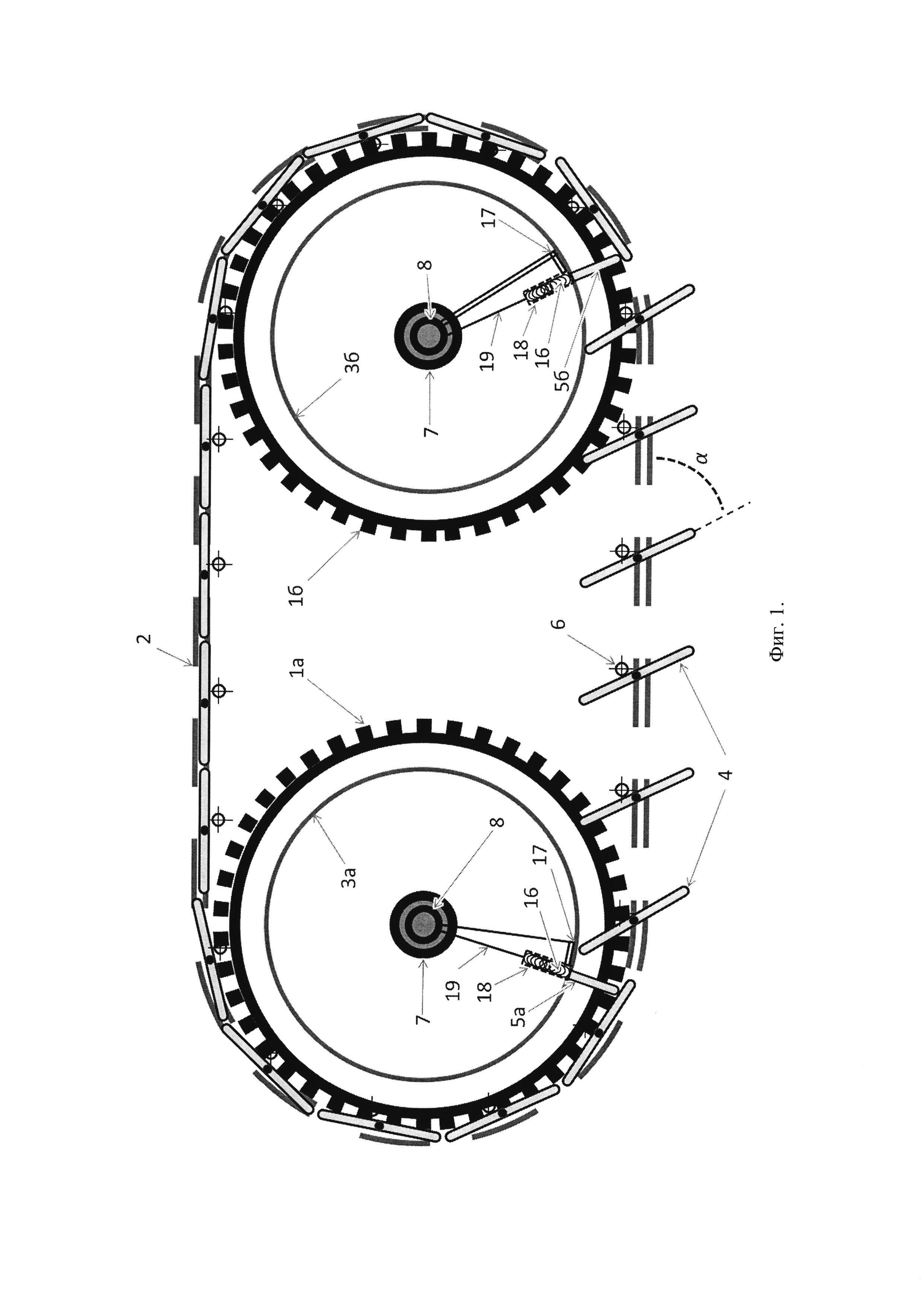
Технический результат достигается за счет того, что предложенный амфибийный гусеничный движитель содержит переднее 1а и заднее 1б подвижные колеса, гусеничную ленту 2 и встроенные в нее лопасти 4, при этом по крайней мере с одной стороны от каждого упомянутого подвижного колеса в нижней части движителя расположена по меньшей мере одна выдвижная направляющая 5а или 5б, каждая лопасть соединена с гусеничной лентой посредством крепежного элемента 15, проходящего в средней ее части и делящего ее на переднюю и заднюю части, и выполнена с возможностью вращения вокруг указанного крепежного элемента, в гусеничную ленту также встроены блокирующие элементы 6, ограничивающие угол α вращения лопастей, в передней и задней частях лопастей имеются продольные прорези 12 и 14, расположенные не в одну линию, причем каждая прорезь находится на одном уровне с одной из выдвижных направляющих 5а или 5б.
С целью более надежной фиксации каждая выдвижная направляющая закреплена на неподвижном колесе 3а или 3б.
Каждое упомянутое подвижное колесо (переднее и заднее) соединено с крутящим валом 7, а каждое неподвижное колесо соединено с неподвижной осью 8, которая проходит внутри или снаружи крутящего вала.
Каждая направляющая соединена с пружиной 16, находящейся во втулке 18 и прикрепленной к подвижному стержню 19, причем внутренняя поверхность той части втулки, которая расположена дальше от гусеничной ленты, покрыта резьбой.
Подвижный стержень 19 соединен с неподвижной осью 8.
Блокирующие элементы 6 расположены таким образом, чтобы в рабочем состоянии угол α между лопастью и гусеничной лентой не превышал 45°, причем поверхность лопастей является обтекаемой.
В неподвижное колесо встроена задвижка 17, имеющая возможность:
- запирать выдвижную направляющую внутри неподвижного колеса,
- блокировать вход выдвижной направляющей внутрь указанного колеса.
В гусеничную ленту могут быть встроены по меньшей мере два ряда лопастей, причем лопасти одного ряда могут имеют меньшую площадь поверхности, нежели лопасти другого ряда.
Неподвижные колеса с установленными на них выдвижными направляющими могут быть размещены с обеих сторон от переднего и заднего подвижных колес.
Очевидно, что помимо переднего и заднего подвижных колес в зависимости от назначения и длины транспортного средства гусеничный движитель может содержать большее количество колес.
Механизм работы амфибийного гусеничного движителя поясняется следующими чертежами.
На фиг. 1 изображен амфибийный гусеничный движитель (вид сбоку).
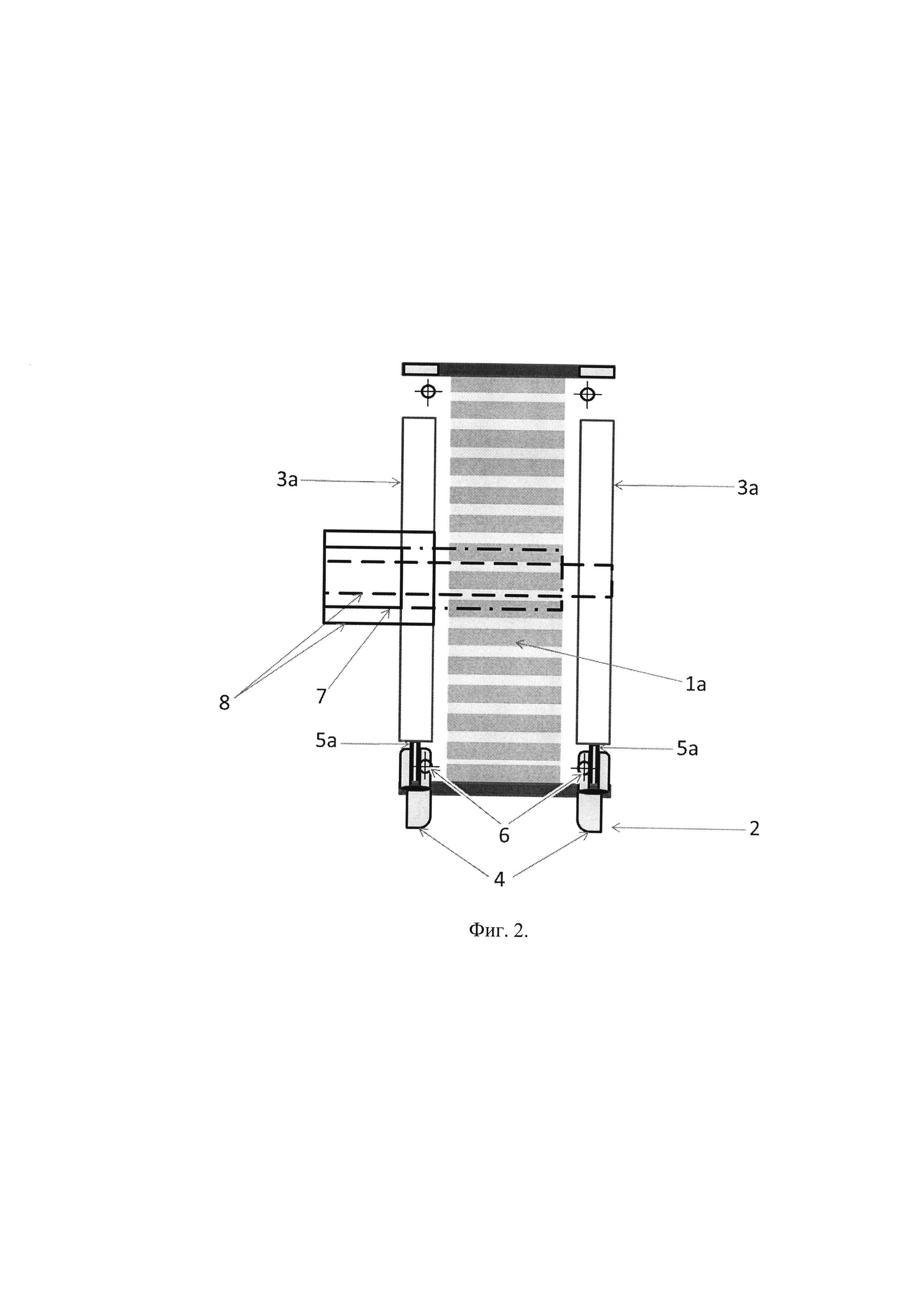
На фиг. 2 изображен амфибийный гусеничный движитель в разрезе (вид спереди).
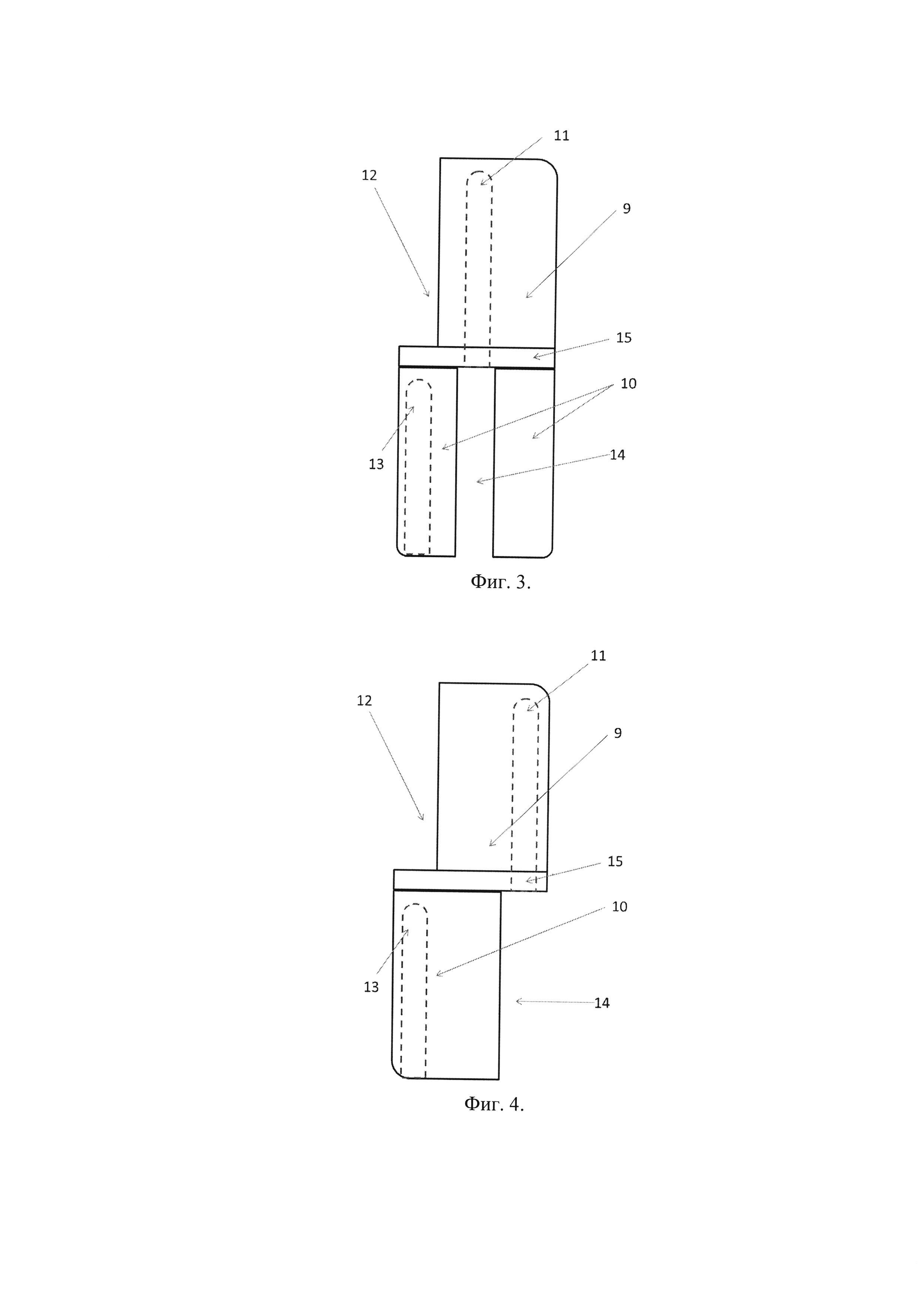
На фиг. 3 и фиг. 4 изображены два варианта наилучшего исполнения лопасти.
Цифрами на фигурах обозначены следующие элементы.
1а - переднее подвижное колесо,
1б - заднее подвижное колесо,
2 - гусеничная лента,
3а - переднее(-ие) неподвижное(-ые) колесо(-а),
3б - заднее(-ие) неподвижное(-ые) колесо(-а),
4 - лопасти (лопатки),
5а - направляющая(-ие) на переднем неподвижном колесе,
5б - направляющая(-ие) на заднем неподвижном колесе,
6 - блокирующие элементы,
7 - крутящий вал,
8 - неподвижные оси,
9 - передняя часть лопасти,
10 - задняя часть лопасти,
11 - место соприкосновения передней части лопасти с направляющей,
12 - вырез в передней части лопасти,
13 - место соприкосновения задней части лопасти с направляющей,
14 - вырез в задней части лопасти,
15 - крепежный элемент лопасти,
16 - пружина,
17 - задвижка,
18 - втулка для пружины,
19 - подвижный стержень.
Амфибийный гусеничный движитель работает следующим образом. Допустим, что изображенный на фиг. 1 движитель при движении транспортного средства вперед вращается против часовой стрелки. Лопасти 4, расположенные сверху, а также опускающиеся и поднимающиеся, находятся в нерабочем положении, то есть не выходят за уровень гусеничной ленты. Продвигаясь мимо направляющей 5а, расположенной на неподвижном колесе 3а, передняя часть 9 лопасти упирается в направляющую в месте соприкосновения 11. Таким образом в следующий момент времени направляющая вытеснит переднюю часть лопасти за пределы гусеничной ленты.
При движении под водой под действием гидродинамического сопротивления передняя часть лопасти будет выходить за пределы ленты до тех пор, пока лопасть не упрется в блокирующий элемент 6.
За счет того, что в задней части лопасти 10 на уровне места соприкосновения 11 ее передней части с направляющей находится прорезь 14, направляющая 5а не вернет лопасть снова в нерабочее состояние за счет соприкосновения с задней частью лопасти и давления на нее.
Расположение прорезей 12 (в передней части) и 14 (в задней части) на лопасти может быть различным, как например изображено на фиг. 3 и 4. Главным здесь является то, чтобы они располагались не в одну линию и были на одном уровне с направляющими 5а и 5б, соответственно.
Когда лопасть приближается к заднему колесу, направляющая 5б за счет давления на ее заднюю часть в месте соприкосновения 13 возвращает ее в нерабочее состояние.
Между передней 9 и задней 10 частями лопасти расположен крепежный элемент 15, с помощью которого она закреплена в гусеничной ленте. Данный элемент соответствует оси вращения лопасти.
При реверсивном движении направляющая 5б за счет давления на заднюю часть лопасти проводит ее в рабочее состояние, а направляющая 5а - возвращает в нерабочее.
Направляющие 5а и 5б являются выдвижными. При движении по суше они могут самостоятельно убираться внутрь неподвижного колеса. Это происходит следующим образом. Каждая направляющая установлена на пружине 16, которая выталкивает направляющую в воде, но при этом сила пружины значительно меньше силы давления колеса на землю. Таким образом, при соприкосновении с землей лопасть убирается внутрь ленты, а направляющая убирается внутрь неподвижного колеса.
Поверхность лопасти является обтекаемой, при этом в рабочем состоянии угол между гусеничной лентой и лопастью α не должен превышать 45°. Это обеспечивает то, что лопасть при соприкосновении с землей не ломается, а задвигается внутрь ленты.
При повторном сильном давлении на направляющую, то есть при повторном соприкосновении лопасти с землей пружина еще глубже входит во втулку 18 и фиксируется в ней за счет наличия на внутренней поверхности той части втулки, которая расположена ближе к центру колеса, резьбы.
Лопасти можно также задвинуть вручную. Для этого нужно убрать направляющую 5а на переднем неподвижном колесе. Это можно сделать за счет смещения пружины 16 к центру колеса с помощью подвижного стержня 19.
После того как все лопасти будут убраны внутрь ленты, таким же образом можно задвинуть и направляющую 5б на заднем неподвижном колесе.
При погружении в воду пружина 16 выталкивается с помощью подвижного стержня 19. Пружина, соответственно, выталкивает направляющую (5а или 5б), а та переводит лопасти 4 в рабочее состояние.
Таким образом обеспечивается простота перехода движителя из одной среды в другую.
Если транспортное средство находится на большой глубине, давление воды может быть насколько большим, что будет вталкивать направляющую обратно внутрь колеса. На этот случай зафиксировать направляющую можно вручную с помощью задвижки 17, которая не позволит ей сместиться обратно.
Рядом с каждым основным подвижным колесом (передним 1а или задним 1б) в зависимости от требований к движителю расположено по меньшей мере одно неподвижное колесо (3а или 3б). К примеру, на фиг. 2 изображен вариант, когда рядом с подвижным колесом 1а по обе стороны от него расположено два неподвижных колеса 3а.
В нижней части каждого неподвижного колеса размещена направляющая 5а (для переднего колеса) или 5б (для заднего колеса), причем они размещены следующим образом. Направляющая 5а размещена таким образом, чтобы его конец соприкасался с передней частью 9 лопасти в тот момент, когда она, спускаясь с переднего колеса, выходит на прямой путь от переднего колеса до заднего. В этом случае за счет силы противодействия направляющей, а также за счет гидродинамического сопротивления среды передняя часть лопасти полностью выталкивается за пределы гусеничной ленты.
Каждое неподвижное колесо (3а или 3б) закреплено на неподвижной оси 8. Каждое основное подвижное колесо (1а или 1б) соединено с крутящим валом 7, который передает ему крутящий момент.
Если одно или более неподвижных колес 3а или 3б размещены по одну сторону от подвижного колеса, то для их крепления достаточно одной неподвижной оси 8. Если они размещены с двух сторон от подвижного колеса 1а или 1б, тогда для их крепления необходимо наличие по меньшей мере двух неподвижных осей 8, одна из которых должна проходить внутри крутящего вала (для неподвижных колес, расположенных с наружной стороны движителя относительно транспортного средства), а другая - снаружи (для неподвижных колес, расположенных с внутренней стороны движителя относительно транспортного средства), как изображено на фиг. 2.
Если транспортное средство в большей степени предназначено для перемещения под водой, к неподвижной(-ым) оси(-ям) может быть прикреплено от двух и более неподвижных колес, причем каждое неподвижное колесо может иметь различную толщину и различное число направляющих, установленных параллельно.
Если на колесе содержится несколько направляющих или к одной неподвижной оси прикреплено несколько неподвижных колес, в таком случае гусеничная лента может быть оснащена несколькими параллельно идущими рядами лопаток.
Для полупогружного транспортного средства или же предназначенного в первую очередь для перемещения по суше может быть достаточно одного ряда лопаток и, соответственно, по одному неподвижному колесу спереди и сзади и по одной направляющей на каждом неподвижном колесе.
Для того чтобы транспортное средство могло перемещаться в жидких средах с большой вязкостью, гусеничная лента может быть оснащена лопастями небольшого размера. Это поможет уменьшить гидродинамическое сопротивление движению лопасти и, соответственно, избежать негативного механического воздействия на крепежный элемент 15 и блокирующие элементы 6.
Для того чтобы транспортное средство могло с достаточно большой скоростью перемещаться в жидких средах и с большой и с малой вязкостью, гусеничная лента должна быть оснащена по меньшей мере одним рядом лопаток большего размера и по меньшей мере одним рядом лопаток небольшого размера.
Когда транспортное средство попадает в вязкую среду, большие лопасти можно задвинуть, и тогда перемещение будет осуществляться за счет лопаток небольшого размера.
Как видно из описания, предложенный амфибийный гусеничный движитель, имея относительно несложную конструкцию, позволит транспортному средству перемещаться по суше, по воде, под водой или же находясь частично в воде в любом направлении, в том числе задним ходом, при этом некоторые варианты его исполнения обеспечивают быстрое перемещение в жидкой среде как с большой вязкостью, так и с малой. Изобретение может найти широкое применение в транспортной промышленности.
Система культивирования плюрипотентных стволовых клеток
Способ комплексной очистки мелассы и извлечения из нее сахарозы
Биопринтер
Бионическая конечность и способ ее изготовления
Искусственная мышца
Искусственный нерв
Способ получения плюрипотентных стволовых клеток
Искусственная сетчатка и бионический глаз на её основе
Автобус (варианты)
Искусственный нерв с функцией восстановления синаптических связей
Система культивирования плюрипотентных стволовых клеток
Способ комплексной очистки мелассы и извлечения из нее сахарозы
Биопринтер
Бионическая конечность и способ ее изготовления
Искусственная мышца
Искусственный нерв
Способ получения плюрипотентных стволовых клеток
Искусственная сетчатка и бионический глаз на её основе
Автобус (варианты)
Искусственный нерв с функцией восстановления синаптических связей

