МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС
Вид РИД
Изобретение
Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Работа включает следующие оперативно-тактические действия: разведка территории, наблюдение за потенциально опасными объектами, обезвреживание этих объектов путем эвакуации или дезактивации, а также решение других подобных задач.
1. Известен Мобильный робототехнический комплекс по патенту RU №2241594 от 2004.12.10. В состав комплекса входит телеуправляемый мобильный робот и пост дистанционного управления. Робот содержит антропоморфный манипулятор, установленный на корпусе шасси, самоходное шасси, блоки электроавтоматики и телемеханики. Силовое плечо манипулятора выполнено в виде жесткой пространственной рамы, состоящей из продольных щек и поперечных стяжек, и в головной части содержит активный шарнир дифференциального типа, а также разгрузочные пружины, соединяющие головную часть плеча с опорно-поворотной платформой манипулятора. Изобретение позволяет в дистанционно управляемом режиме работы с помощью антропоморфного манипулятора на максимальном вылете его "руки" обеспечить выполнение операций, связанных с перемещением предметов, вес которых равен или более собственного веса манипулятора.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование состава и структуры комплекса в соответствии с конкретной оперативно-тактической задачей, что является его недостатком.
2. Известны мобильные робототехнические комплексы семейства «МРК-25», в т.ч. «МРК-25УТ», предназначенные для ведения визуальной разведки внутри помещений и на местности с помощью бортовой телевизионной системы робота, обезвреживания взрывоопасных предметов (ВОП) путем блокировки радиовзрывателей и контейнирования в специальный контейнер, уничтожение ВОП с помощью гидроразрушителя, укрепленного на мобильном роботе, выполнения транспортных и технологических операций, в том числе при работе с ВОП. При всех несомненных достоинствах комплекса он, так же как и предыдущий аналог, не позволяет получать непрерывную визуальную информацию о месте работы с нескольких ракурсов. Кроме того, обзорные телевизионные установки робота располагаются на правом и левом консольных кронштейнах опорно-поворотного устройства таким образом, что несмотря на наличие индивидуальных приводов наведения обзор окружающего пространства оказывается затруднен вследствие двух важных причин. Во-первых, практически половина кругового сектора обзора оказывается заслоненной плечом манипулятора при любых его положениях. Во-вторых, поворот опорно-поворотного устройства в азимутальной плоскости при работе манипулятором вызывает поворот обеих обзорных телевизионных установок, что далеко не во всех случаях желательно. Как следует из инструкции по эксплуатации, иное размещение обзорных телевизионных установок на мобильном роботе не предусматривается (Учебно-тренировочный робототехнический комплекс МРК-25УТ. Руководство по эксплуатации МРК-25УТ.00.00.000РЭ. Предприятие-изготовитель, 2000 г.).
3. Наиболее близким к изобретению по совокупности существенных признаков являются мобильный робототехнический комплекс по патенту RU 2364500 от 31.10.2007 г. - прототип изобретения, включающий в свой состав мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, в состав каждого видеоблока входит видеокамера, заключенная в защитный кожух с источниками подсветки, по меньшей мере, один из видеоблоков, выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, на транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации; комплекс снабжен выносной системой видеонаблюдения, а мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, в комплект же дополнительного оборудования введена раздвижная телескопическая штанга-удлинитель, снабженная на одном конце узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота и на другом конце снабженная узлом крепления привода наведения видеоблока, выполняющего обзорные функции.
При всех несомненных достоинствах комплекса он, так же как и предыдущий аналог, не позволяет получать непрерывную визуальную информацию о месте работы с любого ракурса. Кроме того, использование выносной системы видеонаблюдения, устанавливаемой самим роботом, значительно увеличивает время подготовки робота к работе. Дополнительная камера позволяет наблюдать объект с еще одного ракурса, но не позволяет оперативно получать непрерывную визуальную информацию о месте работы с разных ракурсов.
Изобретение имеет своей целью расширение функциональных возможностей мобильного робототехнического комплекса за счет достижения следующих полезных технических результатов.
1. Обеспечиваются возможности получать непрерывную визуальную информацию о месте работы с необходимых ракурсов и оперативно менять ракурс.
2. Увеличивается эффективность использования и срок службы мобильного робота при его использовании в зонах высокого риска разрушения.
3. Повышается точность дистанционных манипуляций с предметами.
4. Снижается психоэмоциональное напряжение операторов при работе с взрывоопасными предметами.
Сущность изобретения, обеспечивающая достижение совокупности указанных технических результатов, заключается в следующем.
Обозначенная сущность изобретения связана с достижением каждого заявленного технического результата и всей их совокупности следующим образом соответственно.
1. Введение в комплекс системы видеонаблюдения с беспроводным устройством передачи сигнала, смонтированной на беспилотном летательном аппарате винтового типа взамен выносной системы видеонаблюдения, позволит при необходимости использовать ее для наблюдения со стороны за действиями робота в целом, за действиями, осуществляемыми посредством манипулятора робота, а также осуществлять координацию действий операторов при работе в зоне операции двух и более мобильных роботов или же координацию при работе одного робота на нескольких объектах, расположенных на расстоянии прямой видимости один от другого, обеспечив при этом круговой сектор обзора с необходимого ракурса, причем наведение телевизионной установки не будет связано с движениями опорно-поворотного устройства и расположенного на нем манипулятора. Таким образом, будут обеспечены возможность получать непрерывную визуальную информацию о месте работы с необходимых ракурсов и оперативно менять ракурс.
2. Мобильный робототехнический комплекс является дорогостоящим высокотехнологичным изделием, эффективность использования которого в зонах высокого риска разрушения и срок службы во многом зависят от возможности оперативно получать непрерывную визуальную информацию о месте работы с необходимых ракурсов и оперативно менять ракурс (см. п. 1).
3. Повышение точности позиционирования самого мобильного робота и точности дистанционных манипуляций с удаленными предметами обеспечивается возможностью получать оперативно получать непрерывную визуальную информацию о месте работы с необходимых ракурсов и оперативно менять ракурс (см. п. 1).
4. Снижение психоэмоционального напряжения операторов при работе со взрывоопасными предметами обеспечивается оперативно получать непрерывную визуальную информацию о месте работы с необходимых ракурсов и оперативно менять ракурс (см. п. 1);
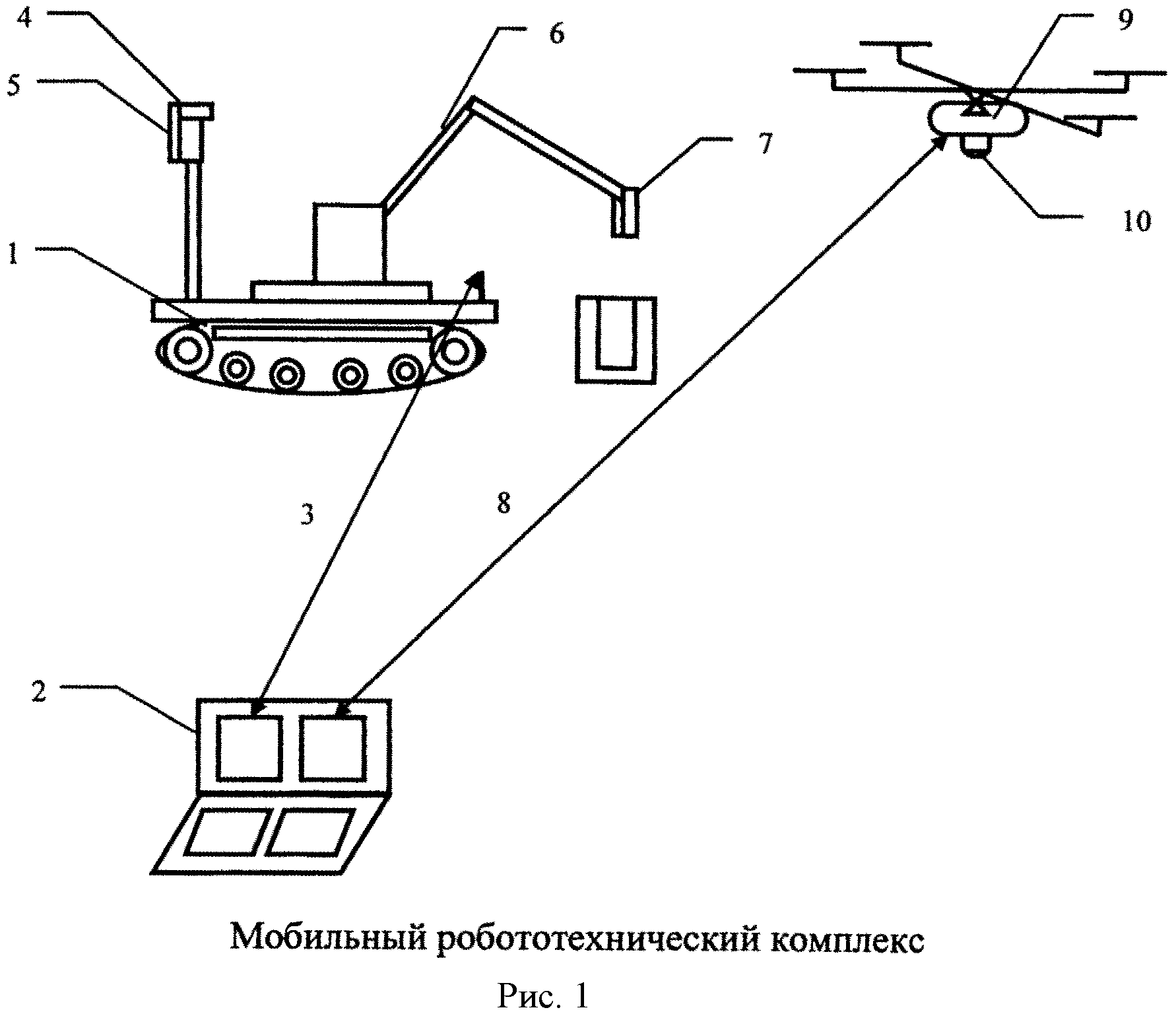
На рисунке 1 изображена структурная схема развернутого на местности робототехнического комплекса с беспроводным устройством передачи сигнала оператору, смонтированной на беспилотном летательном аппарате винтового типа.
Мобильный робототехнический комплекс включает в свой состав мобильный робот (1), интегрированный пост дистанционного управления (2), систему двусторонней связи (не показана) между постом (2) и роботом (1), обеспечивающую канал связи (3) и комплект дополнительного оборудования. В базовый комплект дополнительного оборудования входят различные устройства и механизмы, которыми оснащается робот, применительно к конкретной оперативной задаче. В этот комплект входят транспортная прицепная тележка, автомобильный эвакуатор, комплект губок схвата различной конфигурации, кронштейны-держатели разрушителей взрывоопасных предметов и другие элементы (не показаны). Собственно мобильный робот (1) представляет собой самоходное телеуправляемое транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной двусторонней связи с постом управления (2) и бортовая телевизионная система. Бортовая телевизионная система включает в себя отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, в состав каждого видеоблока, в свою очередь, входит видеокамера, заключенная в защитный кожух с источниками подсветки. Один из видеоблоков (4), выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях (5). На транспортном средстве также укреплены приводы многостепенного манипулятора (не показаны) и сам манипулятор (6) с захватным устройством (7), система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации (не показаны). Отличительной особенностью комплекса является то, что взамен дополнительной выносной системы видеонаблюдения он дополнительно снабжен системой видеонаблюдения с беспроводным устройством передачи сигнала оператору, смонтированной на беспилотном летательном аппарате винтового типа с собственной системой связи и управления, обеспечивающей канал (8) связи и управления системы видеонаблюдения и интегрированного поста дистанционного управления (2). Дополнительная система видеонаблюдения представляет собой видеоблок (10), смонтированный на беспилотном летательном аппарате винтового типа (9). На этом же беспилотном летательном аппарате смонтирована система связи с базовым удаленным постом управления системы, в качестве которого может быть использован или пост, интегрированный в общий пост (2) дистанционного управления мобильным робототехническим комплексом, или, как вариант, отдельный пост управления беспилотным летательным аппаратом и дополнительной системой видеонаблюдения (не показан).
Мобильный робототехнический комплекс функционирует следующим образом. Для решения оперативной задачи, предусматривающей повышенную точность позиционирования самого мобильного робота, повышенную точность дистанционных манипуляций с удаленными предметами, во всех других случаях, когда необходимо получение непрерывной визуальной информации о месте работы с нескольких ракурсов, когда необходимо обеспечить улучшенный обзор окружающего мобильный робот пространства, - в этих случаях, мобильный робототехнический комплекс оснащается системой видеонаблюдения, смонтированной на беспилотном летательном аппарате винтового типа (9), несущий на своем рабочем органе видеоблок (10), выполняющий обзорные функции. Оператор приводит в действие беспилотный летательный аппарат и дистанционно активирует смонтированную на нем систему видеонаблюдения. Система передает на пост управления видеосигнал, позволяющий определить оптимальный маршрут движения робота. Управление работой мобильного робототехнического комплекса, включая управление системами и механизмами мобильного робота и дополнительной системы видеонаблюдения, может осуществляться как с единого интегрированного поста дистанционного управления (2) одним оператором, так и с отдельных постов управления мобильным роботом, беспилотным летательным аппаратом и дополнительной системой видеонаблюдения двумя операторами, находящимися в вербальном контакте.
Источники информации
1. Патент 2364500, Российская Федерация, МПК В25J 5/00. Мобильный робототехнический комплекс [Текст] / Лебедев В.В. и др.; заявитель и патентообладатель ОАО «Ковровский электромеханический завод. - №2007140387/02; заявл. 31.10.07; опубл. 20.08.09.
2. Патент 2241594, Российская Федерация, МПК В25J 5/00. Мобильный робототехнический комплекс [Текст] / Лукьянчиков В.В.; заявитель и патентообладатель Лукьянчиков В.В. - №2003109640/02; заявл. 07.04.03; опубл. 10.12.04.
3. Учебно-тренировочный робототехнический комплекс МРК-25УТ. Руководство по эксплуатации МРК-25УТ.00.00.000РЭ. Предприятие-изготовитель, 2000.