СИСТЕМА И СПОСОБ ДЛЯ ИДЕНТИФИКАЦИИ ПРОДУКЦИИ
Вид РИД
Изобретение
[0001] Данная заявка испрашивает приоритет по предварительной заявке США №61/430,804 от 7 января 2011 года и предварительной заявке США №61/313,256 от 12 марта 2010 года, каждая из которых полностью включена в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Описание настоящей заявки относится в целом к способам и методам для идентификации объектов, в частности для идентификации объектов, проходящих через пространство для измерений.
УРОВЕНЬ ТЕХНИКИ
[0003] Во многих сферах может быть необходимо идентифицировать объекты и считывать закодированные данные, относящиеся к этим объектам. Например, системы розничной торговли применяют считыватели штрихового кода для идентификации продукции, которую необходимо приобрести. При этом, поставка, снабжение и операции сортировки почты могут применять автоматизированные системы идентификации. В зависимости от контекста закодированные данные могут включать цены и места назначений или другие данные, относящиеся к объекту на котором размещен код. Обычно это необходимо для уменьшения количества ошибок или исключений, которые требуют вмешательства оператора в данную операцию.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] В настоящей заявке описаны реализации различных подходов к идентификации объекта и считыванию кода.
[0005] Вариант одного из примеров реализации включает способ, включающий определение по меньшей мере одного параметра, описывающего объекты при их относительном перемещении по отношению к пространству для измерений с использованием датчика, имеющего известные положение и угловую ориентацию относительно пространства для измерений, формирование данных о положении, относящихся к относительному перемещению, и передачу параметров и данных о положении на обрабатывающее устройство, и соотнесение указанных параметров с соответствующими параметрами объектов на основании данных о положении и на основании известных положения и ориентации датчика, и сравнение, для каждого объекта, имеющего соотносимые параметры, соотносимых параметров с параметрами известных предметов для присвоения объекту идентификатора предмета.
[0006] Вариант одного из примеров реализации включает систему, содержащую датчики, каждый из которых выполнен и расположен для определения по меньшей мере одного параметра, описывающего объекты при их относительном перемещении по отношению к пространству для измерений, и имеет известные положение и угловую ориентацию относительно пространства для измерений, датчик положения, выполненный и расположенный для формирования данных о положении, относящихся к относительному перемещению, и обрабатывающее устройство, выполненное с возможностью приема параметров и их соотнесения с соответствующими объектами на основании данных о положении и известных положений и угловых ориентации датчиков, и для сравнения соотносимых параметров с параметрами известных объектов для присвоения объекту идентификатора предмета.
[0007] Вариант одного из примеров реализации настоящего изобретения включает систему для асинхронной идентификации предмета в пространстве для измерений, содержащую датчики объектов, каждый из которых выполнен и расположен для определения по меньшей мере одного параметра, описывающего объекты при их относительном перемещении по отношению к пространству для измерений, и имеет известные положение и угловую ориентацию относительно пространства для измерений. Система содержит датчик положения, выполненный и расположенный для формирования данных о положении, относящихся к относительному перемещению, причем данные о положении не содержат данных системных часов, а обрабатывающее устройство, выполненное и расположенное для приема параметров от датчиков объектов и соотнесения параметров с соответствующими объектами на основании данных о положении и известных положении и угловой ориентации датчика объекта, которые задали каждый соответствующий параметр, без учета данных системных часов и для сравнения, для каждого объекта, имеющего по меньшей мере один соотносимый параметр, по меньшей мере одного соотносимого параметра с параметрами известных предметов для присвоения объекту идентификатора предмета.
[0008] Вариант одного из примеров реализации настоящего изобретения включает способ асинхронной идентификации предмета в пространстве для измерений, включающий определение по меньшей мере одного параметра, описывающего объекты при их относительном перемещении по отношению к пространству для измерений, с использованием множества датчиков объектов, каждый из которых имеет известные положение и угловую ориентацию относительно пространства для измерений. Способ включает формирование данных о положении, относящихся к относительному перемещению, причем данные о положении не содержат данных системных часов, и соотнесение параметров с соответствующими объектами на основании данных о положении и известных положении и угловой ориентации датчика объекта, которые задали каждый соответствующий параметр, без учета данных системных часов и сравнение, для каждого объекта, имеющего по меньшей мере один соотносимый параметр, по меньшей мере одного соотносимого параметра с параметрами известных объектов для присвоения объекту идентификатора предмета.
[0009] Вариант одного из примеров реализации включает материальную машиночитаемую среду, закодированную с использованием машиновыполняемых инструкций для выполнения способа, описанного в настоящей заявке или управления устройством или системой, описанных в настоящей заявке.
[0010] Приведенный выше раздел раскрытия изобретения выполнен для обеспечения выбора вариантов реализации в упрощенной форме, которые дополнительно описаны далее в разделе осуществление изобретения. Раздел раскрытия изобретения не предназначен для определения ключевых или основных особенностей заявляемого объекта и не предназначен для использования для ограничения объема заявляемого объекта. Кроме того, заявляемый объект не ограничен реализациями, которые решают любой из недостатков или их все, описанные в любой части данной заявки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Эти и другие особенности будут более понятны согласно приведенному далее описанию, формуле изобретения и прилагаемым чертежам.
[0012] На фиг.1 схематически показан один из примеров реализации системы для идентификации объектов.
[0013] На фиг.2А показан вид в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0014] На фиг.2В показан вид в разрезе под углом системы по фиг.2А.
[0015] На фиг.3А показан вид с правой стороны в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0016] На фиг.3В показан вид сверху одного из примеров реализации системы для идентификации объектов.
[0017] На фиг.3С показан вид в вертикальном разрезе одного из примеров реализации системы для идентификации объектов.
[0018] На фиг.4А показан вид слева в разрезе по вертикали одного из примеров реализации системы для идентификации объектов.
[0019] На фиг.4В показан вид слева в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0020] На фиг.5А показан вид слева в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0021] На фиг.5В показан вид слева в разрезе по вертикали одного из примеров реализации системы для идентификации объектов.
[0022] На фиг.6А показан вид слева в разрезе по вертикали одного из примеров реализации системы для идентификации объектов.
[0023] На фиг.6В показан вид сверху в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0024] На фиг.7А показан вид слева в разрезе под углом одного из примеров реализации системы для идентификации объектов.
[0025] На фиг.7В показан вид слева в разрезе по вертикали одного из примеров реализации системы для идентификации объектов.
[0026] На фиг.8-12 показаны схемы потоков данных, отображающие потоки данных через один из примеров реализации системы для идентификации объектов и ее подсистем.
[0027] На фиг.13 показана временная диаграмма с выходными сигналами конкретных датчиков в одном из примеров реализации системы для идентификации объектов.
[0028] На фиг.14 показана схема потока данных, отображающая поток данных через один из примеров реализации подсистемы системы для идентификации объектов.
[0029] На фиг.15 показана схема потока данных, отображающая поток данных через один из примеров реализации подсистемы системы для идентификации объектов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0030] На фиг.1 схематически показана система 25 идентификации объекта. По меньшей мере один предмет 20, который необходимо идентифицировать, расположен на системе перемещения, которую необходимо переместить через пространство для измерений 240. В условном примере реализации, показанном на данном чертеже, система перемещения представляет собой конвейерную ленту 31. На практике, система перемещения может быть выполнена из более чем одной конвейерной ленты для обеспечения возможности дополнительного управления перемещением предмета через пространство для измерений. В одном из примеров реализации по фиг.3А использованы три ленты: вводящая конвейерная лента, на которую загружены предметы, которые необходимо идентифицировать; конвейерная лента пространства для измерений, которая перемещает предметы через пространство для измерений 240; и отводящая конвейерная лента, которая удаляет предметы из пространства для измерений 240 для дополнительной обработки. Например, в торговой сфере "дополнительная обработка" может включать расфасовку, обработку при возвратном перемещении и другую обработку, которая известна специалистам в уровне техники. В некоторых примерах реализации система перемещения содержит только конвейерную ленту пространства для измерений. Другие ленты, такие как вводящая конвейерная лента или отводящая конвейерная лента, могут быть добавлены в зависимости от предполагаемого конкретного применения.
[0031] Согласно схематическому графику по фиг.1, система перемещения может быть обработана таким образом, если бы она представляла собой бесконечную линию перемещения. Согласно приведенному далее подробному описанию, в одном из примеров реализации система идентификации объекта может быть выполнена таким образом, что обрабатывающие алгоритмы обрабатывают каждую часть ленты таким образом, если бы эта каждая часть имела уникальное положение, а любой предмет, соотнесенный с такой частью, последовательно обработан таким образом, если бы он был размещен в данном положении. При этом система 25 идентификации объекта может не иметь данных, относящихся к тому, как и когда предметы размещены на ленте, и данных, касающихся того, что произошло с ними после их выхода из пространства 240 для измерений. В одном из примеров реализации система 25 может присваивать линейно возрастающие значения положения для каждой такой части преимущественно бесконечной конвейерной ленты 31 согласно их вхождению в пространство 240 для измерений, аналогично адресам улиц, и может функционировать аналогично улице, имеющей неограниченную длину. Может быть допущено удержание предмета, соотнесенного с конкретным адресом улицы.
[0032] В альтернативном варианте вместо перемещения объектов через заданное пространство для измерений, данное пространство могло бы быть просканировано по заданным положениям. Иными словами, вместо конвейерной ленты 31, перемещающей объекты, пространство для измерений могло быть перемещено вдоль улицы с обеспечением просмотра предметов, распределенных в соответствии с постоянно увеличивающимся адресом. Например, это могло бы быть применено в складской сфере, в которой измерительное устройство перемещается вдоль проходов между рядами и измеряет предметы, расположенные на полках.
[0033] Конвейерная лента 31 снабжена физическим датчиком 122 положения при перемещении. Физический датчик 122 положения при перемещении измеряет положение конвейерной ленты 31 относительно фиксированного опорного положения в пространстве для измерений системы 25. В некоторых примерах реализации физический датчик 122 положения при перемещении представляет собой датчик положения, соотнесенный с роликом конвейерной ленты пространства для измерений. Физический датчик 122 положения при перемещении создает импульс каждый раз при перемещении по существу бесконечной конвейерной ленты 31 на фиксированное приращение расстояния относительно пространства 240 для измерений.
[0034] В качестве примера, датчик угла поворота может включать оконтурирования, соответствующие приращению расстояния в 1 мил конвейерной ленты 31. По существу, каждое оконтурирование создает один отсчет при накоплении с постоянным увеличением, однако в одном из примеров реализации количество отсчетов может быть сгруппировано для каждого отсчета системы. В качестве примера, каждый отсчет системы может соответствовать пяти номинальным отсчетам датчиков. Кроме того, может быть целесообразно обеспечение возможности выдачи отсчетов для проскальзывания или других событий, которые могут приводить к обратному перемещению ленты. При этом, один такой подход применял бы импульсный датчик положения, в котором пара выходных сигналов импульсного датчика положения смещены по фазе друг относительно друга на 90 градусов. В данном подходе направление может быть отнесено к перемещению ленты на основании определения того, какой из двух выходных сигналов возникает первым.
[0035] Пространство 240 для измерений представляет собой объем пространства, через которое система перемещения перемещает предметы 20, и определено посредством объединенных измерительных участков/полей обзора нескольких датчиков 220 параметров предмета, включая, без ограничения, разделитель 140 предметов.
[0036] Пространство 240 для измерений содержит несколько датчиков 220 параметров для измерения предметов 20, проходящих через него. Некоторые примеры реализации содержит по меньшей мере два датчика 220 параметров: разделитель предмета и считывающую систему для считывания меток, которая включает по меньшей мере один датчик меток. В примерах реализации, могут быть включены дополнительные датчики параметров, такие как датчик размеров и/или датчик веса. Датчики параметров можно рассматривать в качестве физических датчиков, которые преобразовывают некоторые наблюдаемые параметры в электрические сигналы, или физического датчика с функцией обработки соотносимого параметра, который преобразует исходные данные (исходные измерительные данные) в цифровые значения, используемые в дополнительной обработке. Обрабатывающие устройства для обработки параметров могут быть совмещены и/или выполнены с физическими датчиками или могут представлять собой модули программного обеспечения, функционирующие параллельно с другими модулями по меньшей мере на одном компьютере общего назначения.
[0037] В одном из примеров реализации выходные значения, измеренные датчиками 220 параметров, переданы на другие модули программного обеспечения в обрабатывающих устройствах. Данное перемещение, в одном из примеров реализации, выполнено асинхронным. Данные от датчиков 220 параметров соотнесены с данными о положении, полученными датчиком положения в системе перемещения, и переданы на два обрабатывающих модуля: формирователь 200 описания предметов, который выполняет обработку совпадения всех значений параметров, собранных для конкретного предмета для создания описания предметов, и обрабатывающее устройство 300 для идентификации предметов, который запрашивает базу данных с описаниями продукции для обеспечения возможности нахождения совпадения между описанием предмета и продуктом, и выдает идентификатор продукта или указатель исключений. При необходимости, система 25 может включать обработчик исключений (показан на фиг.15).
[0038] Один из примеров реализации системы 25 идентификации объекта показан на фиг.2А. Согласно чертежу, пространство для измерений расположено в верхнем корпусе 28. Нижний корпус 26 выполняет функцию конструктивной опоры для поддержания конвейерной ленты пространства для измерений (согласно фиг.3А), физического датчика 122 положения при перемещении и оптических и механических компонент системы 25, включая, без ограничения, камеру 88 линейного сканирования с верхним обзором. Согласно приведенному далее описанию, камера линейного сканирования имеет по существу двухмерное поле обзора, несмотря на то, что оно выполнено не строго плоским в математическом понимании, а представляет собой по существу тонкий прямоугольник с небольшим отклонением.
[0039] В примерах реализации, пространство 240 для измерений может быть частично ограничено таким образом, что ограничивающие стенки формируют конструкцию в виде прохода. Согласно фиг.2А, конструкция в виде прохода сформирована посредством верхнего корпуса 28, с обеспечением подходящих положений, на которых могут быть закреплены элементы различных датчиков, а также уменьшения возможности нежелательных проникновении в пространство 240 для измерений различных частей и объектов. В примере реализации по фиг.2А, верхний корпус 28 использован в качестве конструктивной опоры для поддержания формирователя 119 лазерной полосы, камеры 152 исследуемой области, первого зеркала 48 камеры исследуемой области, второго зеркала 49 камеры исследуемой области, источников 40 освещения, ячеек 175 нагрузки, формирователя 12 световой завесы и различных других оптических и механических компонент.
[0040] Камера 152 исследуемой области предназначена для наблюдения пути линии лазерного света, лазерная полоса, проецируемая вниз по направлению к системе перемещения и любых предметов, расположенных на ней, в ее поле обзора. Известен угол между формирователем 119 лазерной полосы и камерой 152 исследуемой области, который приводит к тому, что изображение лазерной полосы расположено в поле обзора камеры 152 исследуемой области, которую необходимо разместить перпендикулярно лазерной полосе пропорционально высоте предмета, на который спроецирована лазерная полоса.
[0041] Согласно фиг.2В, первая ячейка 175А нагрузки, вторая ячейка нагрузки (не показана на этом виде), третья ячейка 175С нагрузки и четвертая ячейка нагрузки (не показана на этом виде) расположены для измерения нагрузки на ленту. Шесть камер линейного сканирования, включая, без ограничения, нижнюю правую камеру 80 линейного сканирования на отводящем конце и камеру 88 линейного сканирования с верхним обзором, показаны установленными на нижнем корпусе 26 по фиг.2В. В одном из примеров реализации система 25 содержит одиннадцать камер линейного сканирования, выполненных в различных положениях и с различными угловыми ориентациями для полного охвата пространства для измерений в верхнем корпусе. В одном из примеров реализации каждая камера имеет положение и угловую ориентацию, которые довольно хорошо известны, так что положение обнаруженного предмета может быть определено в пределах менее приблизительно ¼ дюйма (то есть, менее приблизительно 1 градуса дуги). При этом камеры могут быть точно установлены в модуле конструкции таким образом, что установка модуля конструкции к элементу корпуса системы обеспечивает точные данные, относящиеся к направлению, в котором ориентирована камера. В одном из примеров реализации некоторые или все камеры могут содержать поляризационный фильтр для уменьшения зеркального отражения от упаковочных материалов, которые могут приводить к затемнению штриховых кодов. В данной конфигурации может быть целесообразным увеличение световой отдачи от источников света для компенсации потерь света вследствие наличия поляризационных фильтров.
[0042] Камеры линейного сканирования выполнены и расположены таким образом, что они имеют поле обзора, которое содержит зеркала камеры линейного сканирования. Первое нижнее правое зеркало 92 для линейного сканирования на отводящем конце показано на фиг.2В в качестве примера зеркала для линейного сканирования. Первое нижнее правое зеркало 92 для линейного сканирования на отводящем конце отражает свет от других зеркал для линейного сканирования (показано на фиг.3А) в нижнюю правую камеру 80 линейного сканирования на отводящем конце, так что нижняя правая камера 80 линейного сканирования на отводящем конце создает данные линейного сканирования приблизительно при поступлении предмета в ее поле обзора на конвейерной ленте 32 пространства для измерений (не показано на фиг.2В, см. фиг.3А). Кроме того, на фиг.2В показан правосторонний источник 128 освещения для нижнего поля обзора.
[0043] В одном из примеров реализации ширина конвейерной ленты может составлять приблизительно 20 дюймов и совершать перемещение на скорости приблизительно 80 футов в минуту, или приблизительно шестнадцать дюймов в секунду. Согласно приведенному далее описанию, скорость перемещения может быть выбрана в соответствии с дополнительными операциями обработки, которые необходимо выполнить на предметах после их идентификации. Например, применение в продовольственном магазине может потребовать относительно низкой скорости ленты для обеспечения возможности выполнения сотрудником магазина расфасовки, а применение для сортировки упаковок может обеспечить более высокую скорость ленты, поскольку сортируемые упаковки могут быть механически загружены.
[0044] Согласно фиг.2В, верхний корпус может быть использован в качестве конструктивной опоры для поддержания камеры 152 исследуемой области, первого зеркала 48 камеры исследуемой области, второго зеркала 49 камеры исследуемой области, источников 40 освещения и различных оптических и механических компонентов системы 25.
[0045] На фиг.3А показаны оптические средства правосторонней камеры, выполненные с возможностью применения для создания изображения первого предмета 20А и второго предмета 20В. Первый предмет 20А показан с наличием лицевой стороны 21, верхней стороны 22 и левой стороны 23. Первый предмет 20А также имеет нижнюю сторону, боковую и правую стороны, которые не показаны на фиг.3А. Несмотря на отображение на фиг.3А в виде коробки для бакалейной продукции, первый предмет 20А может принимать форму любого предмета, подходящего для прохождения через пространство для измерений в соответствии с выбранным применением.
[0046] В показанном примере реализации первый предмет 20А и второй предмет 20В перемещены в пространство для измерений посредством вводящей конвейерной ленты 30 в направлении перемещения к выходному концу вводящей конвейерной ленты 30 и к вводящему концу конвейерной ленты 32 пространства для измерений. Первый предмет 20А и второй предмет 20В перемещены через пространство для измерений посредством конвейерной ленты 32 пространства для измерений в направлении перемещения к выходному концу конвейерной ленты 32 пространства для измерений и по направлению к вводящему концу отводящей конвейерной ленты 34.
[0047] После входа в пространство для измерений, объекты, которые необходимо идентифицировать, проходят через световую завесу 10, созданную посредством формирователя 12 световой завесы, что отображено на фиг.4В. В показанном примере реализации световая завеса 10 спроецирована вниз по направлению к промежутку 36 между конвейерной лентой 32 пространства для измерений и вводящей конвейерной лентой 30 и отражен зеркалом 14 на датчик 16. Формирователь световой завесы может представлять собой, например, панель, включающую линейную матрицу светодиодов (LED), выполненную для обеспечения по существу плоского слоя света. Датчик 16 световой завесы может содержать линейную матрицу фотоприемников, которые обнаруживают световую завесу, спроецированную посредством светодиодов (LED). Для улучшения пространственного разрешения и уменьшения ложноотрицательных считываний в фотоприемниках, светодиоды (LED) и датчики последовательно и попарно приведены в действие. Данный подход направлен на уменьшение воздействий возможного рассеянного света от одного светодиода (LED), попадающего в датчики несмотря на наличие объекта в поле обзора.
[0048] При прохождении объекта через завесу, объект отбрасывает тень на фотоприемники и тем самым обеспечивает данные о ширине объекта, проходящего через световую завесу. Серии измерений данного типа могут быть использованы в качестве одного набора параметров для идентификации объектов. В одном из примеров реализации пространственное разрешение набора формирователей/датчиков световой завесы будет составлять порядка нескольких мм, однако по существу могут быть целесообразны более детальные или грубые измерения в зависимости от применения. Для продовольственного применения, более высокое разрешение может быть необходимо для различения похожих упаковок с продукцией.
[0049] Согласно фиг.3А, источники 40 освещения освещают конвейерную ленту 32 пространства для измерений. Нижняя правая камера 80 линейного сканирования на отводящем конце имеет поле обзора, сфокусированное на первом нижнем правом зеркале 92 для линейного сканирования на отводящем конце. Первое нижнее правое зеркало 92 для линейного сканирования на отводящем конце отражает свет от второго нижнего правого зеркала 93 для линейного сканирования на отводящем конце, которое отражает свет от третьего нижнего правого зеркала 94 для линейного сканирования на отводящем конце. Третье нижнее правое зеркало 94 для линейного сканирования на отводящем конце отражает свет от конвейерной ленты 32 пространства для измерений. Таким образом, нижняя правая камера 80 линейного сканирования на отводящем конце фокусирует свое поле обзора на конвейерной ленте 32 пространства для измерений, захватывает данные линейного сканирования о первом предмете 20А и втором предмете 20В при его перемещении в направлении перемещения по конвейерной ленте 32 пространства для измерений. Кроме того, показана верхняя правая камера 83 линейного сканирования на вводящем конце, которая аналогичным образом изображает конвейерную ленту 32 пространства для измерений.
[0050] Нижняя правая камера 80 линейного сканирования на отводящем конце функционально соединена с обрабатывающим устройством для обработки изображения, собирающим данные линейного сканирования. Обрабатывающее устройство для обработки изображения определяет значение параметров первого предмета 20А и значение параметров второго предмета 20В, перемещаемых через пространство для измерений.
[0051] В одном из примеров реализации обрабатывающее устройство для обработки изображений представляет собой считыватель меток. После сбора считывателем меток данных линейного сканирования, соответствующих первому предмету 20А, он проводит идентификацию метки 24А первого предмета на лицевой стороне 21 первого предмета 20А. В показанном случае код идентификации не выполнен на лицевой стороне предмета, поэтому при работе считыватель меток не идентифицирует метки 24А первого предмета на основании изображения лицевой стороны. Однако считыватель меток, принимающий данные линейного сканирования от нижней правой камеры 80 линейного сканирования на отводящем конце или верхней правой камеры 81 линейного сканирования на отводящем конце, может успешно захватить и идентифицировать метку 24В второго предмета.
[0052] Нижняя правая камера 82 линейного сканирования на вводящем конце имеет поле обзора, сфокусированное на первом нижнем правом зеркале 95 для линейного сканирования на вводящем конце. Первое нижнее правое зеркало 95 для линейного сканирования на вводящем конце отражает свет от второго нижнего правого зеркала 96 для линейного сканирования на вводящем конце, которое отражает свет от третьего нижнего правого зеркала 97 для линейного сканирования на вводящем конце. Третье нижнее правое зеркало 97 для линейного сканирования на вводящем конце отражает свет от конвейерной ленты 32 пространства для измерений. Таким образом, нижняя правая камера 82 линейного сканирования на вводящем конце фокусирует свое поле обзора на конвейерной ленте 32 пространства для измерений, захватывает данные линейного сканирования о первом предмете 20А и втором предмете 20В, перемещаемых в направлении перемещения по конвейерной ленте 32 пространства для измерений. После сбора считывателем меток данных линейного сканирования, соответствующих первому предмету 20А, он идентифицирует метку 24А на левой стороне 23 первого предмета 20А.
[0053] В одном из примеров реализации камеры линейного сканирования могут быть приведены в действие сигналами, полученными от физического датчика положения при перемещении для обзора данных линейного сканирования один раз в каждые пять тысячных дюйма перемещения конвейерной ленты 32 пространства для измерений. Иными словами, при использовании датчика положения с интервалом в 1 мил, каждые пять тысяч интервалов будут составлять один отсчет системы, и будет захвачено одно линейно отсканированное изображение.
[0054] На фиг.3В показаны оптические средства правосторонней камеры, которые включают, без ограничения, нижнюю правую камеру 82 линейного сканирования на вводящем конце и нижнюю правую камеру 80 линейного сканирования на отводящем конце. Оптические средства правосторонней камеры захватывают свет от источника 40 освещения, отраженный обратно в поле обзора оптических средств правосторонней камеры по меньшей мере на одно зеркало для линейного сканирования. Зеркала для линейного сканирования по фиг.3В включают второе нижнее правое зеркало 93 для линейного сканирования на отводящем конце, третье нижнее правое зеркало 94 для линейного сканирования на отводящем конце, второе нижнее правое зеркало 96 для линейного сканирования на вводящем конце и третье нижнее правое зеркало 97 для линейного сканирования на вводящем конце, причем может быть включено большее или меньшее количество зеркал в зависимости от конкретного предполагаемого применения.
[0055] Кроме того, на фиг.3В показана верхняя правая камера 81 линейного сканирования на отводящем конце и верхняя правая камера 83 линейного сканирования на вводящем конце, формирующая изображение конвейерной ленты 32 пространства для измерений, а при доставке вводящей конвейерной лентой 30 первого и второго предметов 20А и 20В на конвейерную ленту 32 пространства для измерений, эти камеры линейного сканирования будут также формировать изображения предметов. В итоге, первый и второй предметы 20А и 20В будут вне видимости верхней правой камеры 81 линейного сканирования на отводящем конце и верхней правой камеры 83 линейного сканирования на вводящем конце при их перемещении по отводящей конвейерной ленте 34.
[0056] В одном из примеров реализации камеры линейного сканирования могут быть установлены горизонтально для уменьшения накопления пыли на линзах камеры. Зеркала, направляющие луч по ломаной траектории, могут быть использованы для обеспечения выбранных геометрических размеров поля обзора для обеспечения возможности наблюдения этими горизонтально установленными камерами пространства для измерений под различными углами.
[0057] Для достижения необходимой глубины резкости для каждой камеры линейного сканирования вместе с высоким разрешением изображения для считывания меток, оптический путь для каждой камеры линейного сканирования должен составлять несколько футов от каждого предмета 20 в пространстве для измерений. Для обеспечения возможности наличия длинных оптических путей без чрезмерного увеличения размера системы 25, каждый оптический путь камеры линейного сканирования может быть изогнут, например посредством зеркал 93, 94, 96 и 97 для линейного сканирования.
[0058] Поскольку ширина поля обзора для каждой камеры линейного сканирования увеличивается линейно с увеличением оптического расстояния от камеры линейного сканирования, то зеркала для линейного сканирования, которые расположены оптически ближе к первому предмету 20А и второму предмету 20В, можгут быть шире по сравнению с шириной ленты в направлении линейного сканирования. Согласно приведенному далее описанию, для наблюдения поля под углом 45 градусов к ленте, ширина поля составляет √2 от ширины ленты, а зеркало должно быть достаточно широким для размещения напротив этого поля. Однако, поскольку каждая камера линейного сканирования отображает только узкую линию пространства для измерений, приблизительно пять тысячных дюйма в конкретных примерах реализации, то каждое зеркало для линейного сканирования может быть выполнено очень коротким в перпендикулярном направлении. В некоторых примерах реализации каждое зеркало для линейного сканирования составляет только часть от высоты в дюйм. Зеркала для линейного сканирования выполнены из стекла приблизительно в четверть от толщины в дюйм и приблизительно с высотой в один дюйм. В устройстве с пространством для измерений с шириной в 20 дюймов, зеркала для линейного сканирования могут иметь ширину от приблизительно 8 дюймов до приблизительно 30 дюймов в зависимости от того, какая часть пространства для измерений задействована для сканирования. Зеркала для линейного сканирования позволяют изгибать оптические пути для нижнего, верхнего и бокового перспективных видов полей обзора камер линейного сканирования, при сохранении относительно узких верхней и боковой стенок, приблизительно 7 дюймов в толщину в одном из примеров реализации.
[0059] Каждая камера линейного сканирования формирует данные линейного сканирования из света, отраженного от предметов 20, совершающих перемещение через пространство для измерений. В одном из примеров реализации с номинальной скоростью всех конвеерных лент и разрешающей способностью изображения, камеры линейного сканирования работают на приблизительно 3200 линий в секунду, соответствующим времени экспозиции приблизительно в 300 микросекунд. С использованием обычной технологии камеры линейного сканирования, эти кратковременные задержки экспозиции требуют наличия фактически светлого освещения для получения высококонтрастных изображений. Для получения достаточной энергии и эффективности освещения может быть выбран источник 40 освещения для обеспечения интенсивного освещения с небольшой расходимостью, сфокусированный вдоль каждого оптического перспективного вида камеры линейного сканирования.
[0060] На фиг.3С показаны оптические средства правосторонней камеры. Оптические средства правосторонней камеры содержат, но не ограничены, нижнюю правую камеру 80 линейного сканирования на отводящем конце, верхнюю правую камеру 81 линейного сканирования на отводящем конце, нижнюю правую камеру 82 линейного сканирования на вводящем конце и верхнюю правую камеру 83 линейного сканирования на вводящем конце, каждая из которых соединена с нижним корпусом 26 системы 25. Оптические средства правосторонней камеры показаны сфокусированными с использованием зеркала для линейного сканирования. В данном примере реализации первое нижнее правое зеркало 92 для линейного сканирования на отводящем конце отражает свет от второго нижнего правого зеркала 93 для линейного сканирования на отводящем конце, которое отражает свет от третьего нижнего правого зеркала 94 для линейного сканирования на отводящем конце, которое отражает свет от конвейерной ленты 32 пространства для измерений. Кроме того, первое нижнее правое зеркало 95 для линейного сканирования на вводящем конце отражает свет от второго нижнего правого зеркала 96 для линейного сканирования на вводящем конце, которое отражает свет от третьего нижнего правого зеркала 97 для линейного сканирования на вводящем конце, которое отражает свет от конвейерной ленты 32 пространства для измерений. Свет падает на конвейерную ленту 32 пространства для измерений от источника 40 освещения, установленного на верхнем корпусе 28.
[0061] При выходе первого предмета 20А и второго предмета 20В из отводящего конца вводящей конвейерной ленты 30, они входят с вводящего конца конвейерной ленты 32 пространства для измерений и проходят через поля обзоров оптических средств правосторонней камеры, происходит создание данных линейного сканирования, которые соответствуют первому предмету 20А и второму предмету 20В. Первый предмет 20А с меткой 24А и второй предмет 20В с меткой 24В выходят из пространства для измерений при их перемещении от конвейерной ленты 32 пространства для измерений и на вводящем конце отводящей конвейерной ленты 34. Множество камер линейного сканирования, каждая из которых имеет свой перспективный вид, захватывают множество изображений первого предмета 20А и второго предмета 20В до их выхода из пространства для измерений. Созаднные данные линейного сканирования использованы системой 25 для распознавания параметров для каждого предмета согласно приведенному далее описанию.
[0062] Камера 88 линейного сканирования с верхним обзором установлена на нижнем корпусе 26 согласно фиг.4А. На этом чертеже предмет 20 совершает перемещение слева направо вдоль вводящей конвейерной ленты 30 через пространство для измерений 240. Промежуток 36 ленты выполнен между вводящей конвейерной лентой 30 и конвейерной лентой 32 пространства для измерений. Источник 41 освещения камеры линейного сканирования с верхним обзором обеспечивает интенсивное освещение промежутка 36 ленты с небольшой расходимостью с обеспечением возможности получения высококонтрастнрго изображения камерой 88 линейного сканирования с верхним обзором.
[0063] Камера 88 линейного сканирования с верхним обзором формирует изображения из света, проходящего через промежуток 36 ленты, и на зеркало 98 для линейного сканирования в верхнем поле обзора. Свет сформирован посредством осветительного источника 41 камеры линейного сканирования с верхним обзором и отражен от предмета 20, поскольку он совершает перемещение от вводящей конвейерной ленты 30 через промежуток 36 ленты и на конвейерную ленту 32 пространства для измерений.
[0064] В дополнение к обеспечению изображения предмета 20 для последующего анализа посредством считывателя меток, камера 88 линейного сканирования с верхним обзором обеспечивает свободное изображение нижней части предмета 20. При анализе посредством считывателя меток, он может идентифицировать метку на нижней части предмета 20, а датчик размеров использует свободные изображения нижней части предмета 20 для улучшения измерений предмета 20. Таким образом, в примерах реализации, включающих камеру 88 линейного сканирования с верхним обзором, предметы с различной высотой (такие как первый предмет 20А и второй предмет 20В по фиг.3А и 3С) могут быть расположены вплотную друг к другу на вводящей конвейерной ленте 30 без разделителя предметов, обрабатывающего предметы с различной высотой в качестве одного предмета, имеющего более сложную геометрическую форму.
[0065] Согласно фиг.4В, оптические компоненты камеры линейного сканирования с верхним обзором, включающие источник 41 освещения для камеры линейного сканирования с верхним обзором, зеркало 98 для линейного сканирования в верхнем поле обзора и камеру 88 линейного сканирования с верхним обзором, расположены в нижнем корпусе 26 системы 25. В показанном примере реализации оптический путь камеры 88 линейного сканирования с верхним обзором изогнут только один раз от зеркала 98 для линейного сканирования в верхнем поле обзора. Другими словами, свет, отраженный от предмета 20, вследствие прохождения света через промежуток 36 ленты, отражен от зеркала 98 для линейного сканирования в верхнем поле обзора на камеру 88 линейного сканирования с верхним обзором. Согласно приведенному ранее описанию, предмет 20 расположен над промежутком 36 ленты при передаче предмета 20 от вводящей конвейерной ленты 30 на конвейерную ленту 32 пространства для измерений.
[0066] Согласно приведенному далее описанию, камера с верхним обзором представляет собой датчик темного поля. Иными словами, при отсутствии объекта в его измерительной области, этот датчик будет принимать небольшой отраженный свет или не принимать его вообще, а изображение будет выполнено темным. При наличии объекта в измерительной области, отраженный свет от источника 41 освещения будет отражен обратно в камеру. В отличие от этого световая завеса, описанная выше, представляет собой датчик светлого поля. При отсутствии объекта изображение выполнено светлым, а при наличии объекта, поле изображения затемнено объектом, что приводит к его появлению в качестве темного объекта в датчике.
[0067] При совместной работе, две системы обеспечивают возможность обнаружения и измерения объектов, что может быть сложно для определения посредством одного или другого подхода. Например, при наличии объекта, который выполнен относительно темным, и/или низкокачественном отражателе камере с верхним обзором может быть сложно отличать объект от темного фонового поля. Аналогично, объект, который выполнен относительно прозрачным, может не обеспечивать достаточный контраст, который необходимо обнаружить посредством световой завесы. Изобретатели определили, что хорошая скорость разделения объектов может быть получена при использовании двух датчиков вместе с формирователем 119 лазерной полосы, описанным далее.
[0068] Согласно фиг.5А, датчик положения при перемещении содержит, без ограничения, вводящую конвейерную ленту 30, конвейерную ленту 32 пространства для измерений, отводящую конвейерную ленту 34 и физический датчик 122 положения при перемещении.
[0069] Датчик веса, согласно фиг.5А, содержит, без ограничения, по меньшей мере одну ячейку нагрузки (175A-D на фиг.12), описанную ранее в настоящей заявке по фиг.2В. В одном из примеров реализации датчик веса содержит четыре ячейки нагрузки. Набор из четырех датчиков нагрузки поддерживает конвейерную ленту 32 пространства для измерений и ее соответствующую механическую конструкцию (двигатель, ролики, ленту и т.п.). В некоторых примерах реализации датчик веса также содержит три датчика объектов, показанные на чертеже в качестве датчика 173А объектов вводящей конвейерной ленты, датчика 173В объектов на входе пространства для измерений и датчика 173С объектов на выходе пространства для измерений. В некоторых примерах реализации каждый датчик объекта расположен приблизительно на две десятых дюйма над датчиком 122 положения при перемещении. В некоторых примерах реализации датчики объектов представляют собой источники света пары фотодетекторов, в которых оптический путь между источником света и фотоприемником прерван при наличии объекта, такого как предмет 20. Другие датчики объектов хорошо известны в уровне техники и могут быть использованы в зависимости от предполагаемого конкретного применения.
[0070] Предмет 20 перемещен по направлению к пространству для измерений вдоль вводящей конвейерной ленты 30 датчика положения при перемещении. В одном из примеров реализации при приближении предмета 20 к пространству для измерений, датчик 173А объектов вводящей конвейерной ленты определяет что предмет 20 расположен приблизительно рядом с входом в пространство для измерений. Предмет 20 проходит над промежутком 36 ленты при его передаче от вводящей конвейерной ленты 30 на конвейерную ленту 32 пространства для измерений, а датчик 173В объектов на входе пространства для измерений определяет, что предмет 20 вошел в пространство для измерений. Аналогично, датчик 173С объектов на выходе пространства для измерений обнаруживает когда предмет 20 выходит из пространства для измерений, и обнаруживает его передачу от конвейерной ленты 32 пространства для измерений к отводящей конвейерной ленте 34. Однако наличие и конкретное положение каждого датчика объекта различны в зависимости от конкретного ожидаемого применения.
[0071] Согласно фиг.5А, при отсутствии предметов, расположенных на конвейерной ленте 32 пространства для измерений, ячейки нагрузки измеряют общий вес конвейерной ленты 32 пространства для измерений. Затем, поскольку по меньшей мере один предмет 20 перемещен на конвейерную ленту 32 пространства для измерений, ячейки нагрузки измеряют вес конвейерной ленты 32 пространства для измерений и вес по меньшей мере одного предмета 20. Каждая ячейка нагрузки преобразует силу (вес) в измеряемый электрический сигнал, который считан в качестве напряжения ячейки нагрузки. Поскольку выходной электрический сигнал каждой ячейки нагрузки составляет порядка милливольт, сигналы ячеек нагрузки усилены и оцифрованы посредством усилителей для ячеек нагрузки (не показаны).
[0072] Согласно фиг.5В, датчик веса содержит, но без ограничения, набор датчиков (173А, 173В, и 173С) объектов и ячейки нагрузки. Датчик 173В объектов на входе пространства для измерений расположен только в верхнем корпусе 28 пространства для измерений и над промежутком ленты (указан на фиг.4А ссылочным номером 36) между вводящей конвейерной лентой 30 и конвейерной лентой 32 пространства для измерений. Аналогично, датчик 173С объектов на выходе пространства для измерений расположен только в верхнем корпусе 28 пространства для измерений и над отводящей конвейерной лентой 34. Датчик 173А объектов вводящей конвейерной ленты расположен над вводящей конвейерной лентой 30 пространства для измерений. Несмотря на то, что на фиг.5В датчик 173А объектов вводящей конвейерной ленты показан рядом с пространством для измерений, расстояние между датчиком 173А объектов для вводящей конвейерной ленты и пространством для измерений может быть выполнено различным в зависимости от предполагаемого конкретного применения.
[0073] Кроме того, на фиг.5В показано, что ячейки 175А и 175С нагрузки расположены в нижнем корпусе 26 пространства для измерений. Ячейки 175В и 175D нагрузки (согласно фиг.12) не видимы на этом виде, поскольку они закрыты ячейками 175А и 175С нагрузки. Ячейки нагрузки поддерживают конвейерную ленту 32 пространства для измерений и ее соответствующие механические части с обеспечением возможности измерения группой ячеек нагрузки веса конвейерной ленты 32 пространства для измерений и расположенных на ней предметов при условии наличия таковых.
[0074] Согласно фиг.5В, физический датчик 122 положения при перемещении, в показанном примере реализации датчик угла поворота, расположен рядом с ячейкой 175С нагрузки. Физический датчик 122 положения при перемещении соединен с конвейерной лентой 32 пространства для измерений и цифровым счетчиком в одном из обрабатывающих устройств системы. Поскольку поворот конвейерной ленты 32 пространства для измерений происходит посредством двигателя, колесо датчика положения совершает поворот с обеспечением возможности записи обрабатывающим устройством для датчика перемещения перемещения конвейерной ленты 32 пространства для измерений. Смещение конвейерной ленты от произвольного начального положения задано в качестве положения в системе перемещения. Обрабатывающее устройство для датчика перемещения создает положение в системе перемещения на конвейерной ленте для каждого импульса датчика перемещения, создаваемого физическим датчиком 122 положения при перемещении, согласно приведенному выше описанию, на практике несколько испульсов датчиков может составлять отсчет системы для обеспечения надлежащих интервалов. Сигналы от физического датчика 122 положения при перемещении также использованы для приведения в действие камер линейного сканирования, описанных в настоящей заявке, для получения изображений. В одном из примеров реализации положение в системе перемещения представляет собой координату в направлении перемещения предмета, причем система координат в направлении перемещения задана в соответствии с виртуальной конвейерной лентой пространства для измерений, которая выполнена бесконечно длинной. При приеме системой 25 положения объекта для предмета 20 от датчика 173А объектов вводящей конвейерной ленты, система создает положение в системе перемещения, соответствующее координате предмета 20 вдоль ленты.
[0075] Согласно фиг.6А и 6В, один из примеров реализации датчика размеров содержит, без ограничения, формирователь 119 лазерной полосы, по меньшей мере одно зеркало для лазерного излучения (показано в настоящей заявке в качестве первого зеркала 99 для лазерного излучения, второго зеркала 100 для лазерного излучения и третьего зеркала 101 для лазерного излучения), камеру 152 исследуемой области, по меньшей мере одно зеркало камеры исследуемой области (показано в настоящей заявке в качестве первого зеркала 48 камеры исследуемой области и второго зеркала 49 камеры исследуемой области), камеру линейного сканирования с верхним обзором (показана ссылочным номером 88 на фиг.4А и 4В) и по меньшей мере одно обрабатывающее устройство для обработки параметров (не показаны) для обработки значений параметров, полученных из изображений камеры исследуемой области от камеры 152 исследуемой области и данных линейного сканирования от камеры линейного сканирования с верхним обзором.
[0076] Формирователь 119 лазерной полосы проецирует лазерную полосу вверх на первое зеркало 99 для лазерного излучения. Согласно приведенному далее описанию, множество типов оптических элементов выполнены с возможностью преобразования лазерного луча в полосу, включая, например, цилиндрические линзы, призму, конические зеркала или могут быть использованы другие элементы. Лазерная полоса отражена от первого зеркала 99 для лазерного излучения ко второму зеркалу 100 для лазерного излучения и на третье зеркало 101 для лазерного излучения. Третье зеркало 101 для лазерного излучения проецирует лазерную полосу вниз от верхней части пространства для измерений на конвейерную ленту 32 прохода для измерений. В одном из конкретных примеров реализации, формирователь 119 лазерной полосы использует голографический оптический элемент и лазерный диод для создания лазерной полосы. В одном из примеров реализации лазерный диод представляет собой инфракрасный лазерный диод, а камера 152 исследуемой области представляет собой камеру с зарядовой связью (ПЗС-камеру), выполненную с возможностью определения инфракрасного излучения. В одном из конкретных примеров реализации, над ПЗМ-камерой расположен фильтр нижних частот или полосовой фильтр, предпочтительно выполненный с обеспечением возможности пропускания инфракрасного излучения при уменьшении количества видимого света.
[0077] Предмет 20 перемещен через систему слева направо вдоль системы перемещения в направлении перемещения от вводящей конвейерной ленты 30 на конвейерную ленту 32 пространства для измерений к отводящей конвейерной ленте 34. Предмет передан от вводящей конвейерной ленты 30 на конвейерную ленту 32 пространства для измерений, которая перемещает его через пространство для измерений. Камера 152 исследуемой области имеет пирамидальное поле обзора, которое направлено вниз на конвейерную ленту 32 прохода для измерений после его изгиба посредством первого зеркала 48 камеры исследуемой области и второго зеркала 49 камеры исследуемой области. Несмотря на то, что поле обзора камеры 152 исследуемой области на фиг.6А и 6В показано изогнутым посредством первого зеркала 48 камеры исследуемой области и второго зеркала 49 камеры исследуемой области, количество зеркал, использованных для изгиба поля обзора камеры 152 исследуемой области показано только в качестве примера и может быть различным в зависимости от предполагаемого конкретного применения. Лазерная полоса спроецирована на конвейерную ленту 32 пространства для измерений в области обзора камеры 152 исследуемой области. Предмет 20 перемещен через пространство для измерений на конвейерной ленте 32 пространства для измерений, он проходит через точку, в которой лазерная полоса спроецирована сверху на конвейерную ленту 32 пространства для измерений. В данной точке камера исследуемой области захватывает изображения предмета 20 и лазерную полосу, отражающуюся от этого предмета.
[0078] В примере реализации по фиг.7А система 25 содержит левостороннюю камеру 89 линейного сканирования с нижним обзором и правостороннюю камеру 90 линейного сканирования с нижним обзором. Поле обзора левосторонней камеры 89 линейного сканирования с нижним обзором изогнуто посредством зеркал левосторонней камеры линейного сканирования с нижним обзором (первое зеркало 105 левосторонней камеры линейного сканирования с нижним обзором, второе зеркало 106 левосторонней камеры линейного сканирования с нижним обзором, третье зеркало 107 левосторонней камеры линейного сканирования с нижним обзором и четвертое зеркало 108 левосторонней камеры линейного сканирования с нижним обзором) до проецирования вниз на конвейерную ленту 32 пространства для измерений под углом, который захватывает верхнюю сторону предмета 20 и его боковую сторону при прохождении предмета 20 через пространство для измерений лицевой стороной вперед от вводящей конвейерной ленты 30 на конвейерную ленту 32 пространства для измерений к отводящей конвейерной ленте 34, согласно показанному примеру реализации.
[0079] Поле обзора правосторонней камеры линейного сканирования 90 с нижним обзором изогнуто посредством зеркал правосторонней камеры линейного сканирования с нижним обзором (первое зеркало 123 правосторонней камеры линейного сканирования с нижним обзором, второе зеркало 124 правосторонней камеры линейного сканирования с нижним обзором, третье зеркало 125 правосторонней камеры линейного сканирования с нижним обзором и четвертое зеркало 126 правосторонней камеры линейного сканирования с нижним обзором) до проецирования вниз на конвейерную ленту 32 пространства для измерений под углом, который захватывает изображения верхней стороны предмета 20 и его лицевую сторону при прохождении предмета 20 через пространство для измерений лицевой стороной вперед.
[0080] Правосторонний источник 128 освещения для нижнего поля обзора обеспечивает интенсивное освещение конвейерной ленты 32 пространства для измерений с небольшим отклонением с обеспечением возможности получения правосторонней камерой 90 линейного сканирования с нижним обзором высококонтрастного изображения. Аналогично, левосторонний источник освещения для нижнего поля обзора (не показан на фиг.7А) обеспечивает интенсивное освещение конвейерной ленты 32 пространства для измерений с небольшим отклонением с обеспечением возможности выдачи левосторонней камерой 89 линейного сканирования с нижним обзором высококонтрастного изображения.
[0081] Согласно фиг.7В поле обзора левосторонней камеры 89 линейного сканирования с нижним обзором изогнуто сначала посредством первого зеркала 105 левосторонней камеры линейного сканирования с нижним обзором, затем посредством второго зеркала 106 для левосторонней камеры линейного сканирования с нижним обзором. Затем это поле обзора дополнительно изогнуто посредством третьего зеркала 107 левосторонней камеры линейного сканирования с нижним обзором и четвертого зеркала 108 левосторонней камеры линейного сканирования с нижним обзором. Четвертое зеркало 108 левосторонней камеры линейного сканирования с нижним обзором проецирует поле обзора левосторонней камеры 89 линейного сканирования с нижним обзором вниз на конвейерную ленту 32 пространства для измерений. Предмет 20 перемещен вдоль вводящей конвейерной ленты 30 по конвейерной ленте 32 пространства для измерений, которая переместит предмет 20 через пространство для измерений после завершения им перемещения через вводящую конвейерную ленту 30. Поскольку предмет 20 перемещен через пространство для измерений, то он попадает в область обзора левосторонней камеры 89 линейного сканирования с нижним обзором, которая захватывает изображения в виде данных линейного сканирования предмета 20.
[0082] Аналогично, поле обзора правосторонней камеры линейного сканирования с нижним обзором сначала изогнуто посредством первого зеркала правосторонней камеры линейного сканирования с нижним обзором, а затем посредством второго зеркала правосторонней камеры линейного сканирования с нижним обзором. Затем это поле обзора дополнительно изогнуто посредством третьего зеркала 125 правосторонней камеры линейного сканирования с нижним обзором и четвертым зеркалом 126 правосторонней камеры линейного сканирования с нижним обзором. Четвертое зеркало 126 правосторонней камеры линейного сканирования с нижним обзором проецирует поле обзора правосторонней камеры линейного сканирования с нижним обзором вниз на конвейерную ленту 32 пространства для измерений. Поскольку предмет 20 перемещен через пространство для измерений, то он попадает в область обзора правосторонней камеры линейного сканирования с нижним обзором, которая захватывает изображения в виде данных линейного сканирования предмета. После завершения предметом 20 своего перемещения по конвейерной ленте пространства для измерений, он проходит по отводящей конвейерной ленте 34. В некоторых примерах реализации некоторые датчики параметров выполнены с возможностью продолжения измерения предмета 20 при его перемещении на отводящей конвейерной ленте 34.
Данные/Поток данных
[0083] На фиг.8 показан поток данных для использования в одном из примеров реализации системы 25, выполненной в порядке перемещения от верхних горизонтальных слоев к нижним горизонтальным слоям асинхронной потоковой архитектуры системы. Иными словами, в примере реализации в системе могут отсутствовать общие часы, а датчики и обрабатывающие устройства выдают свои результаты по мере доступности данных, а потоки данных в целом выполнены однонаправленными. В одном из примеров реализации данные переданы между процессами посредством сообщений сети с протоколом управления передачей и/или межсетевым протоколом (TCP/IP сети) и в процессах посредством общей памяти.
[0084] Согласно приведенному далее более подробному описанию, на фиг.9 показаны идентичные элементы, сгруппированные параллельно, измерительные датчики и/или процессы, а именно датчик 120 положения при перемещении, по меньшей мере один считыватель 130 меток, датчик 150 размеров, разделитель 140 предметов и датчик 170 веса для акцентирования внимания на то, что каждый физический датчик и соответствующее обрабатывающее устройство для обработки параметров может работать автономно от других физических датчиков и обрабатывающего устройства для обработки параметров. Фиг.8, с другой стороны, выполнена таким образом, что данные проходят от уровня источника данных к уровню обрабатывающего устройства для обработки параметров, далее к уровню совпадения параметров геометрических размеров и к окончательному этапу, а идентификация продукта, которая происходит на этапе, на котором предметы, которые были измерены в пространстве для измерений, идентифицированы в качестве продукции или отмечены в качестве исключений. Каждый уровень в иерархии одного из примеров реализации будет рассмотрен по порядку в приведенном далее описании.
Источники данных
[0085] Первый источник данных представляет собой датчик 120 положения в системе перемещения, обычно содержащий физический датчик 122 положения в системе перемещения и обрабатывающее устройство 127 для датчика перемещения, согласно фиг.9. В одном из примеров реализации физический датчик 122 положения в системе перемещения представляет собой датчик угла поворота, прикрепленный к ролику ленты. Согласно фиг.9, исходные измерительные данные от физического датчика 122 положения в системе представляют собой приращение отсчета, то есть импульс D147 датчика перемещения (каждый из которых может обеспечивать более одного импульса датчика), который передан на обрабатывающее устройство 127 для датчика перемещения. Обрабатывающее устройство 127 для датчика перемещения выполняет простое суммирование и процесс пересчета для преобразования импульсов D147 датчика перемещения в значения D148 положения в системе перемещения. Значения положения в системе перемещения отправлены на каждое из других обрабатывающих устройств для обработки параметров таким образом, что обрабатывающие устройства для обработки параметров могут соотнести положение в системе перемещения с каждым измеренным значением параметра. В некоторых примерах реализации обрабатывающее устройство 127 для датчика перемещения также использует импульсы D147 датчика перемещения для создания сигналов D142 приведения в действие камер линейного сканирования и сигналов D151 приведения в действие камеры исследуемой области соответственно для различных камер 132 линейного сканирования и камеры 152 исследуемой области. При приведении в действие камер на основании перемещения системы перемещения, а не в фиксированные временные интервалы, система может обеспечить возможность повторной записи изображений в идентичном поле обзора.
[0086] Второй источник данных по фиг.8 представляет собой камеру 152 исследуемой области. Камера 152 исследуемой расположена для наблюдения пути линии лазерного света, проецируемого вниз по направлению к конвейерной ленте пространства для измерений и любым предметам, расположенным на этой ленте. Согласно приведенному ранее описанию, известен угол между лазерным излучателем и камерой исследуемой области, что приводит к проецированию изображения линии лазерного света в камере, которую необходимо разместить перпендикулярно линии, пропорционально высоте предмета, на который спроецирована линия. Данные от камеры 152 исследуемой области переданы на обрабатывающее устройство 144 для обработки параметров при разделении предметов и устройство 154 оценки размеров.
[0087] Третий источник данных, показанный в системе по фиг.8, представляет собой набор камер 132 линейного сканирования. Основная функция камер 132 линейного сканирования состоит в обеспечения входных данных для обрабатывающих устройств 134 для обработки параметров меток. В одном из примеров реализации выполнено одиннадцать камер 132 линейного сканирования, которые были установлены изобретателями для обеспечения полного охвата пространства для измерений с надлежащим разрешением изображения. Другие примеры реализации могут быть реализованы с меньшим или большим количеством камер линейного сканирования, в зависимости от показателей производительности разработчика, размера и формы пространства для измерений, разрешения камер и других факторов.
[0088] Четвертый показанный источник данных представляет собой весы 172 для взвешивания при перемещении, содержащие, в одном из примеров реализации, три датчика 173А, 173В и 173С объектов (показаны по меньшей мере на фиг.5 В) и четыре аналоговых ячейки 175А, 175В, 175С и 175D нагрузки (показаны по меньшей мере на фиг.12). Ячейки нагрузки расположены по траектории действия нагрузок, поддерживающей конвейерную ленту пространства для измерений. Каждая ячейка нагрузки создает электрический сигнал пропорционально силе сжатия, приложенной к ячейке нагрузки. Сигналы от всех ячеек нагрузки и всех датчиков объектов переданы на формирователь 174 веса.
[0089] Источники данных, описанные выше, включены в один из конкретных примеров реализации и их не следует считать исчерпывающими. Другие источники данных могут быть легко включены в систему данного типа, в зависимости от параметров, которые необходимо контролировать. Например, инфракрасные датчики могли бы обеспечить измерения температуры предмета или формирователи изображений могли быть использованы в качестве источников данных для измерения пространственного распределения цветов на упаковочных этикетках.
Обрабатывающие устройства для обработки параметров
[0090] Согласно фиг.8, второй этап структуры потока данных содержит обрабатывающие устройства для обработки параметров. Каждый источник данных содержит по меньшей мере одно соответствующее обрабатывающее устройство для обработки параметров для преобразования исходных измерительных данных в значения параметров, которые затем использованы обрабатывающим устройством для обработки идентификатора предмета для идентификации предмета. В одном из примеров реализации эти обрабатывающие устройства для обработки параметров содержат обрабатывающее устройство 144 для обработки параметров при разделении предметов, устройство 154 оценки размеров, обрабатывающее устройство 134 для обработки параметров метки и формирователь 174 веса. На фиг.8, дополнительное обрабатывающее устройство 183 для обработки изображения показано в качестве обрабатывающего устройства для обработки параметров.
[0091] Первое обрабатывающее устройство по фиг.8 представляет собой обрабатывающее устройство 144 для обработки параметров при разделении предметов. Функционально обрабатывающее устройство 144 для обработки параметров при разделении предметов включает систему различения предметов, обнаружитель предметов и устройство индексации предметов. Обрабатывающее устройство 144 для обработки параметров при разделении предметов обеспечивает возможность работы системы для множества предметов при близком расположении этих предметов друг к другу в пространстве для измерений. Обрабатывающее устройство 144 для обработки параметров при разделении предметов, в некоторых примерах реализации, использует данные, собранные рядом с входом в пространство для измерений и выполняет четыре функции:
А. сначала обрабатывающее устройство 144 для обработки параметров при разделении предметов распознает, что объект (который может представлять собой по меньшей мере один предмет) вошел в пространство для измерений;
В. во-вторых система различения предмета определяет количество отдельных предметов, составляющих объект, который вошел в пространство для измерений;
С. в-третьих устройство индексации предмета присваивает значение уникального идентификатора предмета каждому отдельному предмету. Уникальный идентификатор предмета представляет собой просто подходящее название для конкретного предмета; и
D. в-четвертых обнаружитель предмета соотносит двухмерное положение в плоскости нижней части пространства для измерений (например, плоскости конвейерной ленты) с каждым предметом, который был идентифицирован и которому был присвоен уникальный идентификатор предмета.
[0092] Если все предметы, входящие в пространство для измерений, хорошо разделены в направлении перемещения (то есть, они разделены), может отсутствовать необходимость в обрабатывающем устройстве 144 для обработки параметров при разделении предметов, поскольку все значения параметров будут соотнесены только с предметом в пространстве для измерений. Однако, при отсутствии разделения предметов, обрабатывающее устройство 144 для обработки параметров при разделении предметов определяет количество предметов, которые расположены близко друг к другу, и присваивает каждому предмету уникальный идентификатор предмета, соотнесенный с его положением в системе перемещения.
[0093] Обрабатывающее устройство 144 для обработки параметров при разделении предметов выдает уникальный идентификатор предмета и положение D148 в системе перемещения при выделении предмета. Значение уникального идентификатора предмета, на который указывает его название, может просто представлять собой последовательно создаваемый индекс, используемый для отслеживания предмета. Эти данные переданы на устройство 154 оценки размеров и формирователь 200 описания предметов.
[0094] Несмотря на то, что выделение предмета может представлять собой отдельную логическую функцию в системе, пример реализации с компьютерной обработкой обрабатывающего устройства 144 для обработки параметров при разделении предметов в конкретных примерах реализации может работать во взаимодействии с устройством 154 оценки размеров с использованием внутренних данных, передаваемых назад и вперед между функциями. Обрабатывающее устройство 144 для обработки параметров при разделении предметов в данном подходе функционирует в качестве части устройства 154 оценки размеров, выполняющего обработку для распознавания различия между одним большим предметом и совокупностью из множества меньших предметов, расположенных близко друг к другу, и для сообщения устройству 154 оценки размеров для оценки размеров по меньшей мере одного предмета.
[0095] Устройство 154 оценки размеров принимает данные от камеры 152 исследуемой области, выбранной камеры 132 линейного сканирования (камеры линейного сканирования с верхним обзором в одном из примеров реализации) и от обрабатывающего устройства для датчика перемещения, которое содержит датчик 120 положения в системе перемещения. Кроме того, при совместной работе с обрабатывающим устройством 144 для обработки параметров при разделении предметов, устройство 154 оценки размеров принимает данные о количестве предметов в поле обзора камеры исследуемой области и их положении. Следует понимать, что при выделение и определение размеров могут представлять собой логически отдельные функции, они могут совместно использовать несколько операций обработки и промежуточные результаты и совсем не требовать отдельных компьютерных процессов.
[0096] В одном из примеров реализации устройство 154 оценки размеров оценивает длину, высоту и ширину размеров предмета без учета того факта, что предмет может иметь сложную (не прямоугольную) форму. Иными словами, в данном подходе устройство 154 оценки рассчитывает наименьший прямоугольник, в который мог бы быть помещен предмет. Устройство 154 оценки размеров может быть выполнено с возможностью оценки значений параметров, касающихся общей формы предмета (цилиндрическая форма, форма прямоугольного геометрического тела, форма суженной бутылки и т.п.), ориентации предмета на системе перемещения и сведений, касающихся трехмерных координат предмета в пространстве для измерений. Рассчитанные значения параметров вместе с положением в системе перемещения предмета, к которому они применимы, переданы на формирователь 200 описания предметов после их расчета.
[0097] Существует одно обрабатывающее устройство 134 для обработки параметров метки, соотнесенное с каждой камерой 132 линейного сканирования. Вместе они формируют считыватель 130 меток, показанный более подробно на фиг.10. Согласно приведенному далее описанию, обрабатывающие устройства для обработки параметров меток могут представлять собой отдельные устройства или виртуальные обрабатывающие устройства, например соответствующие модули, работающие на общем обрабатывающем устройстве. Обрабатывающее устройство 134 для обработки параметров метки проверяет непрерывное полосовое изображение, сформированное посредством камеры 132 линейного сканирования до определения ключевых знаков метки (обычно штрихового кода, такого как штриховой код (универсальный товарный код - UPC)). Кроме того, обрабатывающее устройство 134 для обработки параметров метки выполняет преобразование изображения меток в основной код, который может быть затем сравнен посредством обрабатывающего устройства для обработки данных описания предметов с базой данных с описаниями продукции для определения кода продукта, который уникальным образом идентифицирует продукт. В дополнение к выводу кода продукта на формирователь 200 описания предметов, обрабатывающее устройство 134 для обработки параметров метки выдает выявленное положение меток в центральных координатах камеры.
[0098] Согласно приведенному далее описанию, дополнительные способы доступны для определения параметров меток. Например, многие штриховые коды включают цифровую метку в дополнение к закодированным номерам, которые составляют код. При этом оптическое распознавание символов или аналогичный подход может быть использован для распознавания чисел, а не декодирования штрих-кодов. В случае, в котором метки не представляют собой штриховые коды вообще, а представляют собой записанные данные об идентификации, оптическое распознавание символов снова может быть применено для сбора данных кода. По существу, оптическое распознавание символов или другие процессы распознавания слов могли бы быть использованы для прямого считывания названий или наименований продукции.
[0099] Аналогично штриховым кодам, в случаях, в которых существует ограниченное количество возможных символов и ограниченное количество шрифтов, которые согласно ожиданиям должны быть обнаружены, могут быть приняты упрощающие допущения для облегчения процессов оптического распознавания символов (ОРС) и обеспечения возможности выполнения процесса сравнения символов. Может быть создана библиотека, содержащая каждый потенциальный символ, вместо подробного анализа по частям формы считываемого символа, причем форма может быть сравнена с элементами библиотеки для определения наилучшего совпадения.
[00100] Кроме того, поскольку в обычной среде существует меньшее вероятных сочетаний по сравнению с существующими возможными сочетаниями, то возможно, что частично считываемый код может быть проверен в отношении вероятных кодов для уменьшения возможных вариантов или однозначной идентификации кода. В качестве примера, для десятков товарно-материальных запасов в розничной торговле из тысяч предметов, каждый из которых имеет 10-разрядный штриховой код (UPC), существует 1010 возможных сочетаний, однако только 104 сочетаний в действительности соответствуют продукции в системе розничной торговли. В данном случае для любого заданного частично считываемого кода может быть только одно или несколько совпадений с существующими сочетаниями. Путем сравнения частичного кода с библиотекой фактически используемых кодов, система может устранить потребность в создании исключения или может предоставить оператору небольшое количество выборов, которые могут быть оценены и которые могут быть классифицированы по вероятности на основании других параметров или других доступных данных. В альтернативном варианте данные о частичном совпадении могут быть переданы в качестве параметра на блок идентификации продукции и оценены вместе с другими данными для определения правильного совпадения. В одном из примеров реализации может быть применено более одного программного модуля для считывателя штрихового кода с использованием различных обрабатывающих алгоритмов для обработки идентичных считанных данных, а результаты от каждого модуля могут быть сравнены или, в противном случае, объединены для получения подтверждения после считывания или наиболее вероятного считывания при отсутствии такого подтверждения.
[00101] Для параметров веса, весы 172 для взвешивания при перемещении создают сигнал, пропорциональный сумме весов предметов на этих весах. Для разделенных предметов, из которых только один предмет расположен в рабочем пространстве для измерений в некоторое время, формирователь 174 веса может суммировать сигналы от весов 172 для взвешивания при перемещении, ячеек нагрузки в показанном примере реализации, и применять преобразование для преобразования напряжения в вес. Для неразделенных предметов, из которых в пространстве для измерений одновременно может быть расположено более одного предмета (то есть, близко расположены вдоль конвейерной ленты пространства для измерений), формирователь 174 веса имеет две возможности оценки веса отдельных предметов: сразу после вхождения предмета в пространство для измерений и сразу после выхода из него, Датчики объектов в весах 172 для взвешивания при перемещении выполнены для информирования формирователя 174 веса о входе и выходе предметов с весов 172 для взвешивания при перемещении. Датчики объектов встроены в весы 172 для взвешивания при перемещении таким образом, что их операции могут быть выполнены независимо от других датчиков параметров.
[00102] Аналогично источникам данных, данный перечень обрабатывающих устройств для обработки параметров, приведенный выше в качестве примера, не представляет собой полный перечень. Например, на фиг.8 показано дополнительное обрабатывающее устройство 183 для обработки изображений. Кроме того, следует понимать, что любое из обрабатывающих устройств для обработки параметров, описанных в настоящей заявке, может быть исключено в конкретных примерах реализации. В примере, в котором для идентификации объектов в пространстве для измерений достаточно параметров размера, формы и меток, может отсутствовать необходимость в учете весовых параметров.
Сопоставление геометрических параметров
[00103] Сопоставление геометрических параметров представляет собой процесс использования известных геометрических размеров различных физических датчиков и полей обзора, в которых они собирают их исходные измерительные данные, для сопоставления измеренных значений параметров с предметом, к которому применимы значения параметров. Формирователь 200 описания предметов представляет собой обрабатывающее устройство, которое собирает все асинхронные данные о параметрах и выполняет сопоставление с соответствующим предметом. Аналогично предлагаемым названиям, выходные данные формирователя 200 описания предметов могут быть рассмотрены в качестве описания предметов, соотнесенного с предметом. Описание предмета представляет собой объединение значений параметров, собранных посредством обрабатывающих устройств для обработки параметров предмета, измеренного в пространстве для измерений.
[00104] После создания описания предметов формирователем 200 описания предметов для конкретного предмета описание предмета может быть передано на обрабатывающее устройство 300 для идентификации предметов, которое выполняет функцию идентификации продукции. На практике при наличии некоторого количества доступных полей с описанием предметов возможна идентификация предметов без заполнения каждого поля описания предметов. Например, если при измерении веса было слишком много шумов или метка была скрыта из обзора, смазана или нечитабельна по любой другой причине, то описание предмета все еще может быть передано на обрабатывающее устройство 300 для идентификации предметов, а не оставлено на уровне сопоставления геометрических параметров в формирователе 200 описания предметов. Формирователь 200 описания предметов может решить, что, например, только данные цифровых меток представляют собой данные, достаточные для передачи на обрабатывающее устройство 300 для идентификации предметов или он может определить, что предмет был удален из пространства для измерений, а от обрабатывающего устройства для обработки параметров больше не будет поступать значений параметров.
Идентификация продукции
[00105] В качестве примера, обрабатывающее устройство 300 для идентификации предметов может принимать описание предмета от формирователя 200 описания предметов. С использованием данных о значениях параметров в описании предмета, обрабатывающее устройство для обработки идентификатора предмета формирует запрос к базе данных с описаниями продукции, которая в свою очередь возвращает идентификатор продукта и перечень ожидаемых значений параметров для продукта вместе с любыми дополнительными данными (такими как стандартные отклонения по значениям параметров).
[00106] Обрабатывающее устройство 300 для идентификации предметов принимает решение о совпадении предмета с продуктом с достаточно высокой степенью точности. При положительном ответе данные D233 идентификации продукции представляют собой выходные данные; при негативном ответе, предмет может быть идентифицирован с использованием указателя D232 исключений. Логика принятия решения об идентификации и/или исключении может быть различной от простой до сложной в различных примерах реализации. При простом конечном результате логического уровня обрабатывающее устройство для обработки идентификатора предмета могло бы отметить любой предмет/ для которого вес не совпл с весом продукта, описанного посредством штрихового кода (UPC). При сложном конечном результате логического уровня, обрабатывающее устройство для обработки идентификатора предмета может применять нечеткую логику, которая представляет собой одну из форм небулевой алгебры, применяющей диапазон значений между истиной и ложью, который использован в принятии решения с использованием неточных данных аналогично использованию в системах искусственного интеллекта,
[00107] При необходимости, могут быть применены различные обрабатывающие программы 320 для обработки исключений. Эти программы могут быть настолько элементарными, что могут бездействовать или отображать световой сигнал для наблюдения его человеком, или они могут быть выполнены более сложными. Например, обрабатывающему устройству 300 для идентификации предметов могла бы быть передана инструкция для работы таким образом, если бы считанная метка имела погрешность по меньшей мере в один разряд, и для повторного запроса базы данных с описаниями продукции на варианты по считанной метке.
[00108] При необходимости, каждая успешная идентификация продукции может быть использована для обновления базы данных с описаниями продукции. Другими словами, каждая успешная идентификация увеличивает статистические сведения о соответствии продукта системе 25. Кроме того, при необходимости, данные, относящиеся к указателям D232 исключений, также могут быть добавлены к базе данных 350 для ранее записанных данных для улучшения системы 25.
асинхронный поток данных и обрабатывающая система
[00109] На фиг.9 показан один из примеров реализации потока данных для идентичных элементов по фиг.8 с несколько различным смысловым группированием и размещением. Показанные источники данных представляют собой датчик 120 положения при перемещении, по меньшей мере один считыватель 130 меток, датчик 150 размеров, разделитель 140 предметов и датчик 170 веса для выделения того факта, что каждый физический датчик и соответствующее обрабатывающее устройство для обработки параметров работает автономно от других физических датчиков и обрабатывающих устройств для обработки параметров.
[00110] Датчик 120 положения системы перемещения в некоторых примерах реализации содержит физический датчик 122 положения при перемещении и обрабатывающее устройство 127 для датчика перемещения. В некоторых примерах реализации, например в таком как пример реализации по фиг.9, физический датчик 122 положения при перемещении принимает форму датчика угла поворота, связанного с роликом ленты. Исходные измерительные данные от физического датчика 122 положения при перемещении представляют собой приращение отсчета, в частности импульс D147 датчика перемещения, который передан на обрабатывающее устройство 127 для датчика перемещения. Обрабатывающее устройство 127 для датчика перемещения затем выполняет суммирование и процесс пересчета для преобразования импульсов D147 датчика перемещения в значения D148 положений системы перемещения. Согласно приведенному выше описанию, система может рассматривать конвейерную ленту в качестве по существу непрерывной ленты, а положение системы перемещения представляет собой по существу расстояние вдоль (непрерывной) конвейерной ленты от некоторой произвольной исходной точки.
[00111] В одном из конкретных примеров реализации данное расстояние измерено в приращениях, составляющих приблизительно пять тысячных дюйма, и может быть рассмотрено в качестве координаты по оси х. В одном из примеров реализации обрабатывающее устройство 127 для датчика перемещения также использует импульсы D147 датчика перемещения для создания сигналов D142 запуска линейного сканирования и сигналов D151 приведения в действие камеры исследуемой области соответственно для различных камер линейного сканирования и камеры исследуемой области. Путем приведения в действие камер на основании перемещения системы перемещения, а не в фиксированные временные интервалы, система 25 может обеспечить возможность записи изображений в идентичном поле обзора. Таким образом, выходные данные обрабатывающего устройства 127 для датчика перемещения включает сигнал D142 запуска линейного сканирования, сигнал D151 приведения в действие камеры исследуемой области и положение D148 системы перемещения.
[00112] Кроме набора обычных специальных управляющих устройств для управления двигателями, обработка датчика перемещения включает преобразование входных команд 050 для ленты (например, остановка, приведение в действие, скорость), полученных от датчика 170 веса, в сигналы управляющего устройства для управления двигателем; преобразование импульсов D147 датчика системы перемещения в значения D148 положения датчика перемещения; и передачу значений на различные обрабатывающие устройства для обработки параметров, включая, без ограничения, обрабатывающее устройство 144 для обработки параметров при разделении предметов, устройство 154 оценки размеров, обрабатывающее устройство 134 для обработки параметров метки, формирователь 174 веса и, при необходимости, обрабатывающее устройство 183 для обработки изображения, причем каждый параметрический процесс может представлять собой процесс, показанный и описанный выше по фиг.8.
[00113] Следует отметить, что обрабатывающее устройство 127 для датчика перемещения может взаимодействовать непосредственно с различными камерами для передачи им пускового сигнала кадра.
[00114] Выходные данные о положении D148 системы перемещения отдатчика 120 положения системы перемещения переданы на разделитель 140 предметов, датчик 150 размеров, считыватель 130 меток, датчик 170 веса, любые дополнительные обрабатывающие устройства 183 для обработки изображений (показано на фиг.8) и формирователь 200 описания предметов.
[00115] Набор по меньшей мере из одной камеры линейного сканирования, каждая из которых включена в считыватель 130 меток, приведен в действие посредством сигнала D142 запуска линейного сканирования. Согласно фиг.9, сигнал D142 запуска линейного сканирования приводит в действие камеры линейного сканирования для формирования данных линейного сканирования, которые инициируют работу в разделителе 140 предметов, датчике 150 размеров и считывателе 130 меток. Работа, инициированная посредством сигнала D142 запуска линейного сканирования, будет полностью описана далее в части описания к фиг.10, в которой описан считыватель 130 меток, и в части описания к фиг.11, в которой описан разделитель 140 предметов и датчик 150 размеров. Аналогично, сигнал D151 приведения в действие камеры исследуемой области может приводить в действие камеры исследуемой области, которые выдают данные камер исследуемой области на разделитель 140 предметов и датчик 150 размеров, который описан более подробно по фиг.11.
[00116] В одном из примеров реализации выполнен один считыватель 130, который соответствует каждой камере линейного сканирования и который может представлять собой виртуальный считыватель меток. Считыватель 130 меток проверяет непрерывное полосовое изображение, сформированное посредством его камеры линейного сканирования, до определения ключевых знаков предварительно заданной метки (обычно штриховой код, такой как штриховой код (UPC), в момент чего он декодирует изображение меток в значение D159 цифровых меток. Кроме того, считыватель 130 меток выдает выявленное положение D236 меток в центральных координатах камеры. Данные D159 цифровых меток, положение предмета на системе D148 перемещения и положение меток в центральных координатах D236 камеры переданы от считывателя меток 130 на формирователь 200 описания предметов.
[00117] В некоторых примерах реализации считыватель 130 меток может, в отдельных случаях, принимать поисковые запросы D149 на изображение от формирователя 200 описания предметов, причем считыватель 130 меток извлекает вспомогательный кадр D234 изображения, содержащий метки, из непрерывного полосового изображения. Извлеченные изображения идентифицированных меток переданы в базу данных 350 для ранее записанных данных. База данных 350 для ранее записанных данных представляет собой необязательный элемент системы, который может быть использован для последующего анализа, а поиск изображения аналогично представляет собой необязательную опцию.
[00118] Следует учесть, что каждая камера 132 линейного сканирования может обнаруживать в различные моменты времени даже один предмет. Например, для предметов с показанной меткой, расположенных на конвейерной ленте пространства для измерений, возможно наличие по меньшей мере двух камер линейного сканирования, которые записывают изображение метки (например, левосторонняя и правосторонняя камеры линейного сканирования с нижним обзором) в различные моменты времени. Эти два изображения штрихового кода (UPC) будут обработаны поскольку каждый элемент данных поступает в соответствующий считыватель меток, при этом значения двух штриховых кодов (UPC) и соответствующие центральные координаты камеры асинхронно переданы на формирователь 200 описания предметов.
[00119] Согласно фиг.9, разделитель 140 предметов принимает сигнал D142 приведения в действие камеры линейного сканирования и положение D148 системы перемещения от датчика 120 положения для системы перемещения. Разделитель 140 предметов выдает значение D231 уникального идентификатора предмета (UII) с соответствующим положением D148 предмета в системе перемещения на формирователь 200 описания предметов только после выделения предмета. Значения уникального идентификатора предмета переданы на устройство 154 оценки размеров (показано на фиг.8 и 11) и на формирователь 200 описания предметов по мере их доступности.
[00120] Несмотря на отдельную логическую функцию в системе, выполнение компьютерной обработки в разделителе 140 предметов в примерах реализации системы может проходить вместе с датчиком 150 размеров и/или блоком световой завесы. По существу, разделитель предметов А) облегчает обработку в устройстве 154 оценки размеров (показано на фиг.8 и 11) для распознавания разницы между одним большим предметом и более чем одним предметом/ расположенными близко друг к другу в пространстве для измерений, и В) выдает инструкцию устройству 154 оценки размеров для оценки размеров по меньшей мере одного предмета.
[00121] Датчик 150 размеров принимает сигнал D151 приведения в действие камеры исследуемой области и положение D148 в системе перемещения от датчика 120 положения для системы перемещения. Камера исследуемой области, которая представляет собой часть датчика 150 размеров, после приема сигнала D151 приведения в действие камеры исследуемой области создает данные камеры исследуемой области и передает их на устройство 154 оценки размеров. Кроме того, при совместной работе с разделителем 140 предметов, датчик 150 размеров собирает данные о количестве предметов в поле обзора камеры исследуемой области и о положении предметов. Датчик 150 размеров, в частности устройство оценки размеров, объединяет множество кадров от камеры 152 исследуемой области для оценки геометрического места точек, которые формируют поверхности каждого предмета с использованием процесса разделения на треугольники. Датчик 150 размеров, включая обработку в устройстве оценки размеров, описан более подробно согласно фиг.11.
[00122] Датчик 150 размеров дополнительно преобразует оцененные поверхности предметов для определения ограничивающего прямоугольника для каждого отдельного предмета. Иными словами, он рассчитывает наименьший прямоугольный объем, который бы вмещал каждый предмет. В одном из примеров реализации длина, высота и ширина данного ограничивающего прямоугольника рассмотрены в качестве размеров предмета без учета каких-либо не прямоугольных вариантов его формы. Аналогично, может быть рассчитан более сложный ограничивающий прямоугольник, обрабатывающий соответствующие части предмета в качестве областей, ограниченных соответствующими ограничивающими прямоугольниками. В данном подходе каждый объект представлен в качестве объединения параметров, отражающих коробчатые конструкции, однако общая форма предмета в некоторой степени выполнена фиксированной. Кроме того, дополнительные параметры, такие как ориентация предмета и трехмерные координаты на конвейерной ленте пространства для измерений, рассчитаны в одном из примеров реализации. Кроме того, датчик 150 размеров может, на усмотрение пользователя, оценивать значения параметров, относящиеся к общей форме предмета (цилиндрическая форма, прямоугольное геометрическое тело, бутылка с горлышком и т.п.) путем расчета моментов изображения с высшим порядком. Эти значения параметров, вместе с положением в системе перемещения предмета, к которому они применены, представляют собой данные D166 о размерах, переданные на формирователь 200 описания предметов. В качестве дополнительного этапа, датчик 150 размеров выдает некоторые промежуточные данные, такие как профиль D247 с минимальной высотой, в базу данных 350 для ранее записанных данных.
[00123] В одном из примеров реализации может быть включена функция устранения неопределенностей, что обеспечивает дополнительные подходы к обращению с близко расположенными предметами, которые идентифицированы системой в качестве одного объекта. При этом для каждого объекта, профилированного датчиком размеров, в дополнение к созданию основного профиля для каждого предмета, может быть создано множество дополнительных профилей по высоте. Дополнительные профили могут быть созданы, например, путем выполнения операции обнаружения выделяющихся точек по основному профилю для определения возможности существования дополнительных областей. В местах обнаружения дополнительных профилей, основные и дополнительные профили могут быть опубликованы вместе с описанием предмета для использования другими подсистемами. При отсутствии обнаруженных дополнительных профилей, опубликован только основной профиль.
[00124] В случаях, в которых обнаружены дополнительные профили и множество меток считаны для объекта, имеющего дополнительные профили, может быть запущен процесс устранения неопределенностей на основании дополнительных профилей. В данном процессе, дополнительные профили использованы вместе с ограниченным множеством потенциальных идентификаторов предметов. В частности, могут быть использованы только те идентификаторы предметов, которые соответствуют меткам, считанным для объекта. Поскольку множество потенциальных идентификаторов ограничено таким образом, то сопоставление может проходить в соответствии с подходами, раскрытыми в отношении нескольких примеров реализации, описанных в настоящей заявке. Если результат выполнения данного процесса сопоставления выдал дополнительные предметы, которые все выполнены с возможностью их идентификации уникальным образом, то дополнительные предметы опубликованы в месте множественного считывания, а основной предмет исключен. Если не получены уникальные считывания, то объект множественного считывания может быть опубликован для дополнительного анализа посредством системы.
[00125] Датчик 170 веса представляет собой последний датчик по фиг.9. Согласно приведенному ранее описанию, один из примеров реализации датчика 170 веса включает весы 172 для взвешивания при перемещении и формирователь 174 веса (показан на фиг.8), который суммирует сигналы с весов для взвешивания при перемещении и применяет преобразование для преобразования напряжения в данные о весе. Для неразделенных предметов, из которых более одного предмета может быть одновременно расположено в пространстве для измерений (то есть, близко расположены вдоль конвейерной ленты пространства для измерений), датчик 170 веса имеет две возможности для оценки веса отдельных предметов: сразу после входа предмета в пространство для измерений и сразу после его выхода из пространства для измерений. Датчики объектов весов для взвешивания при перемещении предоставляют датчику 170 веса данные о времени попадания предметов на весы для взвешивания при перемещении или удалении с них, которые использованы формирователем веса для определения данных D191 о весе, соответствующих отдельным предметам при наличии множества предметов, одновременно расположенных на конвейерной ленте пространства для измерений. Если множество предметов перекрывают друг друга вследствие их вхождения в пространство для измерений или выхода из него, то датчики веса создают общий вес для перекрывающихся предметов. Датчик 170 веса передает данные D191 о весе, которые представляют собой вес предмета и положение предмета на системе перемещения, на формирователь 200 описания предметов. При необходимости, непрерывный поток данных D191 о весе передан в базу данных 350 для ранее записанных данных на этапе D190. Кроме того, датчик 170 веса доставляет управляющие команды D50 для управления лентой в управляющие устройства для управления двигателем системы перемещения, что будет полностью описано далее.
[00126] Согласно описаниям к фиг.8 и 9, в одном из примеров реализации формирователь 200 описания предметов принимает данные от всех различных датчиков параметров. Формирователь 200 описания предметов выполняет сопоставление геометрических параметров, которое представляет собой процесс с использованием известных геометрических размеров различных физических датчиков и их полей обзоров для сопоставления измеренных значений параметров с предметом, который был расположен в их полях обзора в момент (моменты), в которые измерения были выполнены.
[00127] Описание предмета (выходные данные компилятора 200 описания предметов) составлено путем сопоставления измеренного значения параметра с предметом, о котором известно, что он расположен в поле обзора конкретного датчика. Согласно приведенному выше описанию, согласно которому известно каждое поле обзора датчиков, например относительно фиксированной опорной точки в системе перемещения, возможно соотнесение случая обнаружения предмета с конкретным положением. Время от времени это может быть целесообразно для калибровки системы путем отображения предмета с известными геометрическими характеристиками и/или метками, например открытой коробки с известными размерами и метками, расположенными на ней в известных положениях.
[00128] В качестве примера, камера линейного сканирования, направленная прямо вниз на ленту, может иметь область обзора, описанную в качестве прямой линии через конвейерную ленту пространства для измерений с центром этой линии, расположенным в центре конвейерной ленты пространства для измерений в направлении поперек перемещения и расположенным на 6 дюймов по направлению вниз от опорной, точки, предварительно заданной для компилятора 200 описаний предметов.
[00129] В данном примере считыватель 130 меток определяет, что штриховой код (UPC) 10001101110 был считан, начиная с 200 пикселов от левого конца поля обзора камеры линейного сканирования, в тот момент, в который положение в системе перемещения составляло 20,500 дюймов от исходной точки. С использованием известных данных о параметрах камеры и взаимном геометрическом расположении камеры по отношению к конвейерной ленте пространства для измерений, формирователь 200 описания предметов может определить, что штриховой код (UPC) был замечен в 1 дюйме от левой конвейерной ленты пространства для измерений и в положении в системе перемещения в 20,494 дюймов. Формирователь 200 описания предметов затем соотносит данный штриховой код (UPC) с предметом (с произвольным уникальным идентификатором предмета, 2541 в качестве примера), который считался наиболее близким к положению в системе перемещения в 20,494 дюймов. Аналогично, при выдаче датчиком веса, в частности формирователем веса, данных D191 о весе для предмета, который был загружен на весы для взвешивания при перемещении в положении в системе перемещения в 20,494 дюймов, формирователь 200 описания предметов соотносит данные D191 о весе с уникальным идентификатором предмета 2541.
[00130] Процесс сопоставления по геометрическим параметрам выполнен в целом более сложным, чем данный простой пример, и использует сведения всей трехмерной области измерения каждого физического датчика. В одном из примеров реализации все трехмерные геометрические размеры всех соответствующих полей датчиков для измерения могут быть объединены в библиотеку для использования формирователем 200 описания предметов. Библиотека использована посредством формирователя 200 описания для соотнесения предметов и измеренных параметров. Таким образом, в одном из примеров реализации это представляет собой полное трехмерное положение каждого предмета (например набор поперечных, продольных и угловых координат предмета), объединенных с высотой, шириной и толщиной предмета, которые использованы при составлении полного описания предметов для каждого предмета. Поскольку в идентичном физическом пространстве не может существовать два предмета, то положение D148 в системе перемещения и описание ограничивающего прямоугольника каждого предмета могут быть использованы формирователем 200 описания предметов для сопоставления значений параметров с конкретным предметом.
[00131] Идентификация предметов происходит согласно приведенному выше описанию в разделах, обозначенных как «Сопоставление геометрических параметров и идентификация продукции». В примере со сферой розничной продажи, после идентификации продукта, обрабатывающее устройство 300 для идентификации предметов передает данные D233 идентификации продукции в систему 400 розничной торговли (POS). Альтернативные варианты использования системы следует рассматривать отлично от систем материально-технического обеспечения розничной торговли и процессов. Например, система могла бы быть применена в обратной логистике, в которой идентификаторы продукта переданы аукционеру, центру распределения, производителю или другому объекту.
Служебные функции
[00132] В одном из примеров реализации процесс конфигурирования и контроля следит за изменениями и обновляет данные для калибровки системы при непрерывном контроле работы каждого процесса программного обеспечения. Каждый процесс может быть выполнен с возможностью выдачи обычного сигнала тактового импульса. Если сигнал тактового импульса от конкретного обрабатывающего устройства для обработки параметров или подсистемы не принят после некоторого периода времени, то процесс конфигурирования и контроля может остановить работу и снова привести в действие конкретное обрабатывающее устройство для обработки параметров. В примерах реализации применение структуры асинхронного потока данных, удаление и возобновление любого одного процесса не воздействует в целом на любой другой процесс или не требует повторной синхронизации с сигналом синхронизации. Однако некоторые предметы, проходящие через систему при перезагрузке, не могут быть идентифицированы, в случае чего они могут быть обработаны путем выполнения процедур простого исключения.
Процесс передачи файла
[00133] Процесс передачи файла ответственен за перемещение низкоприоритетных, в целом объемных файлов данных через сеть от различных датчиков параметров в базу 350 данных для ранее записанных данных при наличии данной дополнительной базы данных. Процесс передачи файла управляет передачей объемных файлов, включая, без ограничения, изображения линейного сканирования, сформированные в качестве части обработки в считывателе меток, профиль по высоте, созданный посредством устройства оценки размеров, и потоки данных преобразователя веса. Если передачи файлов происходят беспорядочно, то высокоприоритетные передачи данных в режиме реального времени, такие как потоки данных линейного сканирования, могут быть прерваны низкоприоритетными передачами данных. Процесс передачи файла управляет этими возможными конфликтными ситуациями.
[00134] В одном из примеров реализации каждый процесс передачи файла в режиме реального времени, который использован для наборов или файлов с объемными низкоприоритетными данными (ОНП данные), сначала сохраняет ОНП данные локально на жестком диске обрабатывающего устройства для обработки параметров в котором созданы наборы данных. Обычно, приблизительно каждые 300 миллисекунд, процесс передачи файла, выполняемый по меньшей мере на одном компьютере, в котором размещено обрабатывающее устройство для обработки параметров, проверяет вновь поступившие ОНП данные и передает их через сеть в базу данных для ранее записанных данных, которая для удобства может быть соотнесена с обрабатывающим устройством для идентификации объекта. Данные переданы в измеренной форме с ограниченными размерами пакетов данных и увеличенными задержками между передачами таких пакетов данных, так что средняя пропускная способность сети уменьшается минимально.
[00135] Параметры конфигураций для процесса передачи файла расположены в базе данных конфигураций. Данные о конфигурации, такие как размеры пакетов данных, задержки при передачах, IP адреса и адреса конечных серверов сохранены в базе данных. Процесс передачи файла использует обычный протокол передачи файлов и реализован в одном из примеров реализации с использованием cURL библиотеки с открытым доступом.
Считыватель 130 меток
[00136] На фиг.10 показана схема потока данных для одного из примеров реализации считывателя меток. В одном из примеров реализации системы 25, выполнено 11 камер линейного сканирования и, согласно приведенному ранее описанию, выполнен один (виртуальный) считыватель 130 меток, логически связанный с каждой камерой линейного сканирования, даже несмотря на то, что вся обработка в считывателе меток на практике может быть выполнена на идентичном физическом обрабатывающем устройстве. Считыватель 130 меток выполняет три функции: идентификацию, декодирование любых захваченных меток и, при необходимости, извлечение изображений меток из непрерывного полосового изображения, собранного посредством камеры 132 линейного сканирования. Таким образом, каждый считыватель 130 меток в примере реализации эффективно работает в качестве декодера штрихового кода. В примере реализации, одиннадцать датчиков меток вместе образуют считывающую систему для считывания меток с углом обзора в 4 пи стерадиан. Каждый считыватель 130 меток содержит обрабатывающее устройство для обработки параметров, запрограммированное на идентификацию меток в данных линейного сканирования, захваченных каждой из камер 132 линейного сканирования 132, и преобразование меток в данные цифровых меток. Согласно приведенному ранее описанию, каждая камера 132 линейного сканирования принимает сигнал D142 запуска линейного сканирования на основании перемещения системы перемещения.
[00137] Элемент данных линейного сканирования представляет собой выходной элемент данных от одной области матрицы 131 камеры линейного сканирования. Каждый элемент данных D181 линейного сканирования, собранный посредством матрицы 131 камеры линейного сканирования, передан на буферное запоминающее устройство 133 для камеры линейного сканирования, которое выполнено внутренним относительно камеры 132 линейного сканирования. Буферное запоминающее устройство 133 для камеры линейного сканирования содержит данные В181 линейного сканирования, совмещенные в пакеты из двух сотен элементов данных линейного сканирования, которые могут быть рассмотрены в качестве полос D237 обзора изображения.
[00138] В одном из примеров реализации номинальная разрешающая способность изображения в предмете для каждой 4,096-пиксельной камеры 132 линейного сканирования составляет приблизительно 200 точек на дюйм. Таким образом, полоса обзора изображения из двух сотен элементов данных линейного сканирования соответствует приблизительно полю обзора в одну двадцатую дюйма. Каждая камера линейного сканирования может быть выполнена с возможностью передачи отдельных полос обзора изображения от камеры на кольцевое буферное запоминающее устройство 135 для сбора данных в обрабатывающем устройстве 134 для обработки параметров метки. Следует отметить, что полосы D237 обзора изображения использованы для передачи данных между камерой 132 линейного сканирования и обрабатывающим устройством 134 для обработки параметров метки только для обеспечения эффективности передачи; обработка данных в обрабатывающем устройстве 134 для обработки параметров метки выполнена на построчной основе. Кроме того, следует отметить, что буферное запоминающее устройство 133 для камеры линейного сканирования собирает и сохраняет данные линейного сканирования каждый раз при перемещении системы перемещения на заданное приращение импульса для приведения в действие вне зависимости от наличия предмета в пространства для измерений.
[00139] Согласно приведенному выше описанию, каждая полоса D237 обзора изображения отмечена с использованием соответствующего значения положения D148 системы перемещения, причем обычно одно значение положения является всем, что необходимо для каждой полосы из 200 строк. Полосы D237 обзора изображений сосредоточены в кольцевом буферном запоминающем устройстве 135 для сбора данных для переформирования их исходного формата в виде непрерывного полосового изображения. Таким образом, даже если предмет или метка на предмете охватывает множество полос D237 обзора изображений, то предмет или метка может быть полностью обработаны после приема полос D237 обзора изображений кольцевым буферным запоминающим устройством 135 для сбора данных. В одном из примеров реализации кольцевое буферное запоминающее устройство 135 для сбора данных выполнено с возможностью хранения 20,000 строк данных камеры.
[00140] Считыватель 130 меток извлекает данные из буферного запоминающего устройства 135 и построчно проверяет данные В181 линейного сканирования, в процессе 136 анализа ключевых знаков в направлениях "поперечно движению" (в каждой стоке) и "продольно движению" (от одной строки к следующей) для нахождения характеристик ключевых знаков для предварительно заданного формата меток. Например, штриховые коды UPC могут быть распознаны по их переходам с высокой-низкой-высокой интенсивностью. При анализе 136 ключевых знаков, идентифицированные метки извлечены из данных линейного сканирования и извлеченных меток D158, переданных в логический процесс 137 декодирования. Логический процесс 137 декодирования преобразует данные изображения в значение D159 машиночитаемой цифровой метки. Программное обеспечение OMNIPLANAR® (товарный знак, зарегистрированный на компанию «Metrologic Instruments, Inc.»; приобретен компанией «Honeywell» в 2008 году) представляет собой пример программного обеспечения, подходящего для выполнения идентификации меток и декодирования в считывателе меток. Согласно приведенному далее описанию, множество процессов с параллельной логикой могут быть применены для обеспечения возможности идентификации с дублированием. При этом, в случаях, в которых первый подход к идентификации и декодированию кода выполнен успешно, второй подход может доказать это успешное выполнение.
[00141] В одном из примеров реализации предметы обозначены в целом с использованием меток, соответствующих предварительно заданным стандартам. Примеры меток, выполненных с возможностью считывания путем выполнения логического процесса 137 декодирования включают, без ограничения, следующие метки: EAN-8, EAN-13, UPC-A и одномерные штриховые коды UPC-E, которые захватывают 8-, 12- и 13-значные международные номера товаров.
[00142] Следует понимать, что считыватель 130 меток может работать непрерывно на данных линейного сканирования. В контексте считывателя штрихового кода, при наблюдении изображения от максимального-минимального уровня при линейном сканировании, программное обеспечение предпринимает попытку его идентификации в качестве метки. При идентификации программное обеспечение затем кодирует метку в значение цифровых меток. В конкретных примерах реализации данные линейного сканирования, переданные на логический процесс 137 декодирования представляют собой монохроматические данные, так что логический процесс 137 декодирования основан на освещении и других аспектах оптической конфигурации в данных линейного сканирования для отражения данных с достаточным контрастом и разрешением с обеспечением возможности декодирования напечатанных меток согласно стандартам UPC/EAN (европейский товарный код).
[00143] Выходные данные от логического процесса 137 декодирования содержат три типа данных: значение цифровой метки D159, положение D148 в системе перемещения, соответствующее по меньшей мере одним данным линейного сканирования, в которых были идентифицированы метки, и положение меток в центральных координатах D236 камеры. При этом центральные координаты камеры могли бы описать двухмерную область, занятую всей меткой. В альтернативном варианте метке могло бы быть присвоено конкретное положение X-Y, например центральной части изображения метки, в частности углу или краю.
[00144] Кроме идентификации и декодирования меток, вторая дополнительная функция считывателя 130 меток состоит в извлечении изображений отдельных предметов по запросу формирователя 200 описания предметов, и в передаче этих изображений, извлеченных вспомогательных кадров D234 изображений, в базу данных 350 для ранее записанных данных. Формирователь 200 описания предметов выдает запрос D234 на поиск изображений вместе с положением в системе перемещения, описывающим положение предмета с меткой в области обзора камеры 132 линейного сканирования, что приводит к тому, что процесс 138 извлечения участка передает запрос D149 на поиск изображения для извлечения надлежащего вспомогательного кадра D234 из кольцевого буферного запоминающего устройства 135 для сбора данных. Процесс 138 извлечения участка затем выполняет сжатие извлеченного субкадра D234 в формат JPEG и передает его через процесс передачи файла в базу данных 350 для ранее записанных данных.
Разделитель 140 предметов и датчик 150 размеров
[00145] На фиг.11 показана схема потока данных одного из примеров реализации датчика 150 размеров и разделителя 140 предметов. Датчик 150 размеров главным образом выполняет функцию определения размеров предмета или измерения отдельных предметов в протяженном пространстве, а разделитель 140 предметов выполняет функцию разделения предметов или сортировки, или различения предметов, входящих в пространство для измерений. Например, при входе двух коробок в пространство для измерений в непосредственной близости друг от друга, разделитель 140 предметов сообщает остальной части системы о наличии двух предметов для идентификации, а датчик 150 размеров сообщает системе размер, ориентацию и положение каждого из двух предметов. Согласно приведенному выше описанию, эти два процесса работают во взаимодействии друг с другом, несмотря на выполнение ими совершенно разных функций. Поскольку начало процесса определения размеров фактически происходит до полной идентификации предмета посредством разделителя 140 предметов, то датчик 150 размеров будет рассмотрен до разделителя 140 предметов. В одном из примеров реализации датчик 150 размеров и разделитель 140 предметов используют выходные данные одной из камер 132 линейного сканирования 132А и камеры 152 исследуемой области.
Датчик 150 размеров
[00146] В одном из примеров реализации датчик 150 размеров содержит камеру 152 исследуемой области и камеру 132А линейного сканирования с верхним обзором. Устройство 154 оценки размеров (часть обрабатывающего устройства для обработки параметров для датчика 150 размеров) принимает данные от камеры 152 исследуемой области, камеры 132А линейного сканирования с верхним обзором и датчика 120 положения в системе перемещения (показано на фиг.8).
[00147] Основная функция датчика 150 размеров состоит в определении размеров предмета. При выполнении процесса 153 извлечения профильного разреза по высоте и процесса 155 группирования, датчик 150 размеров объединяет множество кадров от камеры 152 исследуемой области для оценки геометрического места точек, которые формируют поверхности каждого предмета с использованием процесса разделения на треугольники. Согласно одному из примеров реализации, формирователь лазерной линии непрерывно проецирует линию света на конвейерную ленту пространства для измерений (и любой предмет, расположенный на этой ленте). Линия спроецирована сверху и проходит по существу перпендикулярно направлению перемещения ленты. При работе линия света будет проходить вверх и над любым предметом на ленте, который проходит через область обзора. При приведении в действие посредством сигнала D151 приведения в действие камеры исследуемой области, камера 152 исследуемой области записывает изображение линии света. Известен фиксированный угол между осью проецирования посредством формирователя лазерной линии и оптической осью камеры исследуемой области, так что изображение линии света в камере 152 исследуемой области будет расположено перпендикулярно длине линии на величину, пропорциональную высоте лазерной линии над опорной поверхностью, которая может быть задана в качестве верхней поверхности конвейерной ленты. Иными словами, каждый кадр от камеры 152 исследуемой области представляет собой линию света, видимо проходящую от одного края ленты к другому с виляниями и уходами в сторону, причем эти виляния и этапы указывают на один профиль по высоте для предметов на ленте.
[00148] При приведении в действие посредством сигнала D151 приведения в действие камеры исследуемой области, камера 152 исследуемой области обеспечивает данные об изображении для камеры исследуемой области (одно изображение) каждый раз при перемещении транспортной конвейерной ленты пространства для измерений на выбранный интервал отсчета. В некоторых примерах реализации контраст данного профиля по высоте может быть улучшен путем использования инфракрасного лазера и полосового фильтра, выбранного для предпочтительного пропускания инфракрасного света в передней части камеры 152 исследуемой области. С использованием фильтра в необходимом месте, выходные данные камеры 152 исследуемой области представляют собой данные D46 изображения с камеры исследуемой области, которые содержат двумерное изображение, отображающее только смещение лазерной полосы, которая проходит над предметом.
[00149] Камера 152 исследуемой области снимает лазерную полосу, которая спроецирована через конвейерную ленту пространства для измерений (от края до края) посредством формирователя лазерной полосы. Данные D46 камеры исследуемой области и значение положения D148 в системе перемещения, при записи данных D46 камеры исследуемой области, переданы на обрабатывающее устройство 144 для обработки параметров при разделении предметов и на устройство 154 оценки размеров, которые работают во взаимодействии друг с другом.
[00150] Процесс 153 извлечения профильного разреза по высоте извлекает профильный разрез D257 по высоте из данных D46 камеры исследуемой области путем определения поперечного смещения лазерной полосы, который была спроецирована посредством формирователя лазерной линии над предметом. При наличии угла между направлением проецирования лазерной полосы и углом наблюдения камеры 152 исследуемой области, изображение полосы расположено сбоку в случае пересечения полосы предметом с высотой отличной от нуля. Устройство 154 оценки размеров использует алгоритм разделения на треугольники для расчета профильного разреза D257 по высоте предмета по исходному (несмещенному) пути линейной полосы. Следует принять к сведению, что профильный разрез D257 по высоте представляет собой схему высот всего того, что размещено на ленте в положениях под лазерной полосой.
[00151] Профильный разрез D257 по высоте обеспечен путем сбора точек данных по высоте, которые в настоящей заявке будут упоминаться как хиксели (hixels). Каждый хиксель отражает высоту (z) точки в системе координат с положением (x, y). Согласно фиг.3А, y-координата отражает поперечное положение ленты, x-координата отражает продольное положение ленты, а z-координата отражает высоту. Процесс 153 извлечения профильного разреза по высоте применен к каждому кадру камеры 152 исследуемой области, которая приведена в действие каждый раз при перемещении системы перемещения на предварительно заданное расстояние, приблизительно 0,005 дюймов в одном из примеров реализации.
[00152] Итоговые последовательности профильных разрезов по высоте объединены в группы путем выполнения процесса 155 группирования для создания профилей D247 с минимальной высотой. Процесс 155 группирования основан на предварительно заданном минимальном расстоянии взаимосвязи. Если расстояние между двумя любыми хекселями меньше данного расстояния взаимосвязи, то их относят к идентичной группе. Создание профиля D247 с минимальной высотой происходит один раз при отсутствии хикселей, поступающих от процесса 153 извлечения профильного разреза по высоте, который вероятно может быть соотнесен с группой. Другими словами, профиль D247 с минимальной высотой содержит все точки с высотой отличной от нуля на ленте, которые вероятно могли бы представлять собой часть одного предмета. Следует отметить, что профиль D247 с минимальной высотой может фактически содержать по меньшей мере два предмета, расположенных близко друг к другу.
[00153] Каждый профиль D247 с минимальной высотой сравнен с предварительно заданной минимальной длиной и размерами по длине для обеспечения того, что он отражает реальный предмет, а не только несколько хикселей, образованных от шумовых помех. При условии наличия, профили D247 с минимальной высотой переданы в процесс 157 оценки параметров размеров и процесс 145 объединения по размерам. Профиль D247 с минимальной высотой при необходимости отправлен в базу данных 350 для ранее записанных данных.
[00154] В одном из примеров реализации профиль по высоте может быть сглажен для учета шума датчика. В данном подходе при однократном создании профиля по высоте для одного объекта части этого профиля, которые представляют собой отклонения, могут быть удалены. Согласно приведенному далее описанию, удаление выявленных отклонений до создания профиля могло бы ограничить части реального объекта, которые разделены точкой разрыва, например может возникнуть временный указатель, поскольку объект отделен от временной основной части в конкретной плоскости отображения. Однако, после создания профиля, данный тип разрыва обычно был бы устранен с обеспечением возможности сглаживания, которое выполняется без удаления данных о прерывающихся участках объектов.
[00155] Кроме того, может быть целесообразно включить функцию определения минимального уровня ленты системы профилирования по высоте. При обычном использовании лента будет непрерывно проходить через проецируемую лазерную полосу, а система должна измерять нулевую высоту объекта. В теории, минимальный уровень ленты может быть измерен с использованием измерения средней высоты, а данное измерение может быть использовано в качестве динамического предела, который вычтен из измеренной высоты объектов, проходящих по конвейеру, или добавлен к ней. На практике может быть сложно отличить пустую ленту от ленты, перемещающей короткие предметы, которые могли бы стбросить измерение нуля если при обработки будут восприняты в качестве пустой ленты. Одно из решений состоит в использовании предварительно заданного предела по высоте, а система при обработке чего-либо, что меньше предельной высоты, считает ленту пустой. Даже при прохождении реального объекта через систему его воздействия будут сглажены в качестве результата скользящего усреднения. Это может обеспечить возможность удаления медленно изменяющихся участков сигнала с обеспечением возможности одновременного удаления высокочастотных данных.
[00156] Второй источник данных для датчика 150 размеров представляет собой выбранную камеру 132А линейного сканирования (индекс "А" указывает на выбранную камеру), причем выбранная камера представляет собой, в данном примере, в частности, матрицу 131А из камер линейного сканирования с верхним обзором. Камера 132А создает данные линейного сканирования после приема сигналов D142 запуска линейного сканирования. Затем данные линейного сканирования отправлены в буферное запоминающее устройство 133А для камеры линейного сканирования, согласно приведенному выше описанию для считывателя 130 меток.
[00157] Согласно приведенному ранее описанию, многие из идентичных функций обработки данных использованы для определения размеров и разделения предметов. Таким образом, буферное запоминающее устройство 133А для камеры линейного сканирования выдает изображение полосы обзора на кольцевое буферное запоминающее устройство 135А для сбора данных, которое на фиг.11 показано размещенным в обрабатывающем устройстве 144 для обработки параметров при разделении предметов. Кроме того, поскольку специалисту будет понятно, что различные этапы обработки данных, показанные на данном чертеже, сгруппированы по принадлежности к конкретному обрабатывающему устройству (например, обрабатывающему устройству для обработки параметров при разделении предметов, устройству оценки размеров и т.п.) только для удобства пояснения, а такое группирование не предназначено для указания физического обрабатывающего блока, в котором возникают такие этапы обработки.
[00158] Камера линейного сканирования с верхним обзором расположена для наблюдения нижней части предметов на конвейерной ленте пространства для измерений. Данная камера выравнена для отображения через небольшой промежуток между вводящей конвейерной лентой и конвейерной лентой пространства для измерений. В отличие от других камер линейного сканирования, у камеры линейного сканирования с верхним обзором нет необходимости в наличии большой глубины резкости, поскольку в целом происходит наблюдение за единообразной плоскостью. Иными словами, нижняя часть каждого предмета обычно бывает приблизительно в плоскости конвейерной ленты пространства для измерений. Обычно каждая линия сканирования содержит некоторые темные пикселы (в которых в промежутке нет каких-либо предметов) и некоторые подсвеченные пикселы (в которых в промежутке расположена часть предмета). Формирователь 141 силуэта в обрабатывающем устройстве 144 для обработки параметров при разделении предметов обрабатывает данные В181 линейного сканирования, принятые из кольцевого буферного запоминающего устройства 135А для сбора данных построчно и определяет превышение интенсивностью любых пекселов предварительно заданного предела. Пикселам, которые превысели предварительно заданный предел, присвоен двоичный уровень высоты, а пикселам, которые ниже предварительно заданного предела, присвоен двоичный нижний уровень, а именно 0. Любая линия, содержащая по меньшей мере одно высокое значение названо силуэтом D242 (линия без единого высокого значения представляет собой нулевой силуэт). Следует понимать, что что любой силуэт может содержать данные о множестве предметов. Силуэт D242, созданный посредством формирователя 141 силуэта передан на формирователь 143 контура, который представляет собой логичесий процесс для создания нижних контуров.
[00159] Совместно с камерой линейного сканирования с верхним обзором, блок световой завесы также наблюдает за промежутком 36 и объектами, проходящими через него. Согласно приведенному выше описанию, попарные сканирования светодиодов (LED) и фотодиодов обнаруживают затемненные участки сканированной линии. Поскольку световая завеса представляет собой датчик светлого поля, то ее силуэты соответствуют не светлым пекселам, как в камере линейного сканирования с верхним обзором, а темным пикселам. Для множества объектов, оба датчика будут обозначать идентичные положения силуэтов. Однако для конкретных объектов, в одном из двух датчиков может произойти ошибка наблюдения за предметом. Например, световая завеса может привести к ошибке при прохождении прозрачного объекта через его область обзора, а камера может привести к ошибке при конфликте с объектом, который представляет собой низкокачественный отражатель. В одном из примеров реализации два силуэта могут быть подвергнуты логической операции «ИЛИ», так что при идентификации объекта одним из датчиков или обоими датчиками, объект обнаружен системой. В альтернативном варианте две системы могут работать независимо, причем каждая система создает свой собственный набор параметров для оценки посредством системы.
[00160] Последовательности силуэтов объединены в кластеры посредством процесса объединения, аналогичного созданию групп, выполняемому в формирователе 143 контура. Формирователь 143 контура основан на заданном минимальном расстоянии взаимосвязи. Если расстояние между любыми двумя высокими пикселами в последовательности силуэта меньше, чем данное расстояние взаимосвязи, то их следует считать принадлежащими к идентичному кластеру. Таким образом, кластер включает оба пекселя по линии сканирования и пикселы в соседних линиях сканирования. Нижний контур D244 каждого кластера пикселов вычеслен путем извлечения частей вдоль направления x (вдоль ленты) и направления y (поперек ленты) и путем нахождения первого и последнего переходов между пикселами кластеров и фоном для каждой строки и столбца. Иными словами, при наличии промежутков между пикселами кластеров по строке или столбцу обрабатывающее устройство пропускает эти переходы, поскольку существует больше пикселов в идентичном кластере дополнительно по строке или столбцу. Данное задание нижнего контура предполагает, что предметы обычно выполнены выпуклыми. При использовании данного подхода к извлечению контуров, полости в предметах будут проигнорированы. Нижний контур D244 использован в процессе 145 объединения по размерам. Для системы применяющей световую завесу и камеру линейного сканирования может быть два нижних контура D244 или, в альтернативном варианте, два набора полученных данных могут быть совместно использованы для задания одного нижнего контура D244. Для приведения в последующем описании и соответствующих чертежах, контур в отдельности или вместе отмечены как D244, а форму единственного числа следует понимать так, как будто она подразумевает форму множественного числа.
[00161] Нижний контур D244 использован в некоторых примерах реализации для улучшения понимания размеров каждого предмета. Например, согласно приведенному выше описанию, лазерная полоса, наблюдаемая камерой исследуемой области, расположена под углом к пространству для измерений. Вследствие данного угла, высокие предметы могут затенять соседние короткие предметы. Данные от камеры линейного сканирования с верхним обзором могут обеспечивать возможность более надежного обнаружения выравнивающим устройством для выравнивания размеров и разделителем предметов затененных предметов и выдачи их нижних контуров в размерах по x и y.
[00162] Перед расчетом длины, ширины и высоты наименьшего ограничивающего прямоугольника, окружающего предмет в процессе 157 оценки параметров размеров, профиль D247 с минимальной высотой может быть математически повернут (в плоскости конвейерной ленты) к обычной ориентации в процессе 145 объединения по размерам. В некоторых примерах реализации профиль D247 с минимальной высотой спроецирован на плоскость x-y (то есть, плоскость конвейерной ленты) для соотнесения с набором поперечных, продольных и угловых координат нижнего контура D244. Расчитаны первый и второй моменты этих точек, из которых получены ориентация основных и второстепенных осей. Затем профиль D247 с минимальной высотой может быть математически повернут таким образом, что эти оси выравнены по отношению к строкам и столбцам буферного запоминающего устройства для временного изображения с обеспечением упрощения расчетов длины и ширины предмета.
[00163] Длина предмета может быть задана в качестве наибольшей величины из двух размеров в плоскости x-y, а ширина задана в качестве наименьшей величины. Кроме того, высота предмета расчитана путем построения гистограммы для всех данных о высоте предмета из профиля с минимальной высотой и нахождения значения, близкого к пиковому значению (например, 95 процентов).
[00164] Для последующей проверки предмета в процессе 145 объединения по размерам, могут быть вычислены дополнительные моменты вместе с обеспечением описания высоты предмета. После поворота профиля D247 с минимальной высотой, расчитаны трехмерные вторые моменты. При расчете этих моментов, предмет следует рассматривать в качестве плотности равномерного распределения, заполненной с верхней части измеренной высоты до поверхности ленты. Система размеров создает параметры, включая, без ограничения, вторые моменты, которые отличны от моментов, использованных для определения ориентации предмета, ширины, длины и высоты, которые сохранены в базе данных для ранее записанных данных. Эти параметры, вместе с данными о весе от датчика веса и метками от считывателя меток, использованы для проверки предмета.
[00165] После завершения нижнего контура D244 (в том смысле, что больше ни одного пиксела не будет соотнесено с данной группой пикселов), выделение особенностей выполнено для определения ориентации предмета, его длины и ширины. В некоторых примерах реализации проанализированы пикселы по контуру (периметру) кластера на плоскости x-y (то есть, плоскости конвейерной ленты пространства для измерений). Пикселы в контуре обработаны согласно заполнению даже при наличии полостей во внутренней части реального предмета. Расчитаны первый и второй моменты для этих точек и получены ориентации основных и второстепенных осей. Нижний контур D244 затем математически повернут таким образом, что эти оси выравнены относительно строк и столбцов буферного запоминающего устройства для временного изображения с обеспечением упрощения расчетов длины и ширины нижнего контура. Длина нижнего контура, ширина, ориентация и второй момент, вместе известные в настоящей заявке в качестве объединенных данных D256, переданы в процесс 146 отделения предмета и процесс 157 оценки параметров размеров.
[00166] Нижние контуры D244 и профиль D247 с минимальной высотой также использованы в процессе 157 оценки параметров размеров. Кроме того, процесс 157 оценки параметров размеров принимает значение D231 уникального идентификатора предмета вместе с соответствующим положением D148 в системе перемещения, имеющим отношение к предмету.
[00167] В процессе 157 оценки параметров размеров, устройство 154 оценки размеров принимает нижний контур D244, значение D231 уникального идентификатора предмета с положением D148 в системе перемещения и профиль D247 с минимальной высотой для определения ограничивающего прямоугольника для каждого отдельного предмета. В некоторых примерах реализации, поскольку шум даже от одного случаного пиксела мог бы неблагоприятно повлиять на измерение, длина предмета, ширина и высота не основаны на максимальной протяженности объединенных пикселов. Вместо этого, процесс 145 объединения по размерам вычисляет гистограмму, которая содержит несколько пикселов в каждом из трех измерений после поворота предмета в обычную ориентацию. Эти расстояния вычислены между приблизительно однопроцентной и приблизительно 99-процентной границами для задания длины, ширины и высоты предмета.
[00168] Если предмет не создает нижний контур, то только созданные предметом данные о размерах представляют собой профиль с минимальной высотой. Это может возникать, например, при выполнении нижней части предмета очень темной, аналогично банке с виноградным желе, несмотря на то, что дополнительное использование световой завесы приведет к решению данного вопроса. Выделение особенностей и отделение предмета выполнены только на профиле с минимальной высотой для случая, в котором профиль D247 с минимальной высотой представляет собой только полученные данные о размерах. При условии доступности данных о световой завесе и профиле с минимальной высотой и недоступности данных камеры, могут быть использованы доступные данные.
[00169] При наличии в группе по меньшей мере одного нижнего контура D244 и по меньшей мере одного профиля D247 с минимальной высотой, существует несколько возможностей выбора для извлечения особенностей. В одном из примеров реализации система может игнорировать нижние контуры и работать только на основании профиля с минимальной высотой. Другими словами, в данном подходе нижние контуры использованы только для облегчения интерпретации данных о размерах, собранных от профиля с минимальной высотой. Выделение особенностей на основании множества профилей с минимальной высотой выполнено только аналогично выделению особенностей для одного профиля с минимальной высотой, но с использованием данных от группы профилей с минимальной высотой.
[00170] В итоге, если процесс 157 оценки параметров размеров не принял профиль D247 с минимальной высотой, соответствующий значению D148 положения в системе перемещения, то процесс 157 оценки параметров размеров будет располагать только нижним контуром D244 для определения данных D166 о размерах для предмета. Например, поздравительная открытка имеет слишком небольшую высоту, которую необходимо обнаружить датчиком 150 размеров. Таким образом, задана нулевая высота предмета, а длина предмета и ширина определены только из нижнего контура. Длина и ширина расчитаны путем поворота и данных нижних контуров по x, y согласно приведенному выше описанию для устройства 154 оценки размеров с использованием первого и второго моментов. При условии недоступности профиля с минимальной высотой, не расчитан трехмерный второй момент.
[00171] Периодически процесс 157 оценки параметров размеров проверяет положение D148 в системе перемещения и передает собранные данные D166 о размерах на формирователь 200 описания предметов для случая, в котором он определяет отсутствие какого-либо дополнительного профиля D247 с минимальной высотой или нижних контуров D244, которые необходимо соотнести с конкретным предметом. Кроме того, устройство 154 оценки размеров использует данные для оценки различных данных D166 о размерах, включая, без ограничения/ значения параметров, касающиеся общей формы предмета (цилиндрическая форма, прямоугольное геометрическое тело, бутылка с горлышком и т.п.), ориентацию предмета на системе перемещения и сведения, касающиеся трехмерных координат предмета на конвейерной ленте пространства для измерений. Кроме того, в данном примере реализации датчик 150 размеров выполнен с возможностью расчета значений других параметров на основании размера и формы предмета. Различные данные D166 о размерах вместе со значениями положения D148 в системе перемещения для предметов переданы на формирователь 200 описания предметов после их расчета.
Разделитель 140 предметов
[00172] Кроме того, на фиг.11 показан разделитель 140 предметов, который может обеспечивать возможность работы системы с неразделенными предметами. При работе разделитель 140 предметов распознает, что некий предмет (по меньшей мере один предмет) вошел в пространство для измерений. В процессе 145 объединения по размерам, при частичном перекрытии профиля D247 с минимальной высотой и нижних контуров D244 (то есть, они по меньшей мере частично объединены), они могут быть соотнесены с одним предметом, а про разделитель 140 предметов можно сказать, что он имеет отделенный предмет, проходящий через пространство для измерений. В процессе 146 отделения предмета, разделитель 140 предметов объединяет профиль D247 с минимальной высотой с нижним контуром D244 с обеспечением создания объединенных данных D256. Вследствие способа, которым созданы описания нижнего контура D244 и профиля D247 с минимальной высотой, все нижние контуры D244 и профили D247 с минимальной высотой выполнены частично взаимно непересекающимися. Процесс 145 объединения по размерам ожидает наступления события. Процесс 145 объединения по размерам сохраняет и имеет в распоряжении записи о профиле D247 с минимальной высотой и нижние контуры D244 вследствие их приема. При приеме нового профиля D247 с минимальной высотой, процесс 145 объединения по размерам снова проверяет группу нижних контуров D244 для установления факта частичного перекрытия профиля D247 с минимальной высотой и конкретного нижнего контура D244. Профиль D247 с минимальной высотой и нижние контуры D244, которые частично перекрывают друг друга, расположены в одной группе. Процесс 145 объединения по размерам не проверяет профиль D247 с минимальной высотой по отношению к другим профилям с минимальной высотой, поскольку они, по определению, выполнены раздельными. Аналогично после приема нового нижнего контура D244 снова происходит проверка принятых профилей D247 с минимальной высотой для установления факта перекрытия нижним контуром D244 любого профиля D247 с минимальной высотой.
[00173] В процессе 145 объединения по размерам, разделитель 140 предметов сопоставляет значения положения D148 в системе перемещения для нижнего контура D244 с любым профилем D247 с минимальной высотой, который использует по существу идентичные значения положения D148 в системе перемещения. На данной стадии разделитель 140 предметов распознает нижний силуэт предмета и распознает высоту по существу каждой точки предмета и готов к передаче объединенных данных D256 в процесс 146 отделения предмета.
[00174] Во-вторых, разделитель 140 предметов определяет количество предметов, содержащих объект, который вошел в пространство для измерений. В конкретных случаях несколько отдельных предметов ошибочно приняты в качестве одного предмета в одном или другом наборе данных. Задача процесса 146 отделения предмета состоит в определении момента, в который профиль D247 с минимальной высотой и нижние контуры D244 отражают идентичный предмет и в который они отражают множество предметов.
[00175] В-третьих, разделитель 140 предметов, в частности устройство индексации предмета, присваивает значение D231 уникального идентификатора предмета каждому отдельному предмету и, в-четвертых, вместе со значением D231 уникального идентификатора предмета разделитель 140 предметов задает двумерное положение предмета (значение положения D148 в системе перемещения). С использованием сведений об объединенных данных D256, возможно относящихся к одному предмету, разделитель 140 предметов присваивает значение D231 уникального идентификатора предмета объединенным данным D256 с известными значениями положения D148 в системе перемещения. Процесс 146 отделения предмета выдает в качестве результата значение D231 уникального идентификатора предмета вместе с положением D148 в системе перемещения, передаваемые в процесс 157 оценки параметров размеров для дополнительной обработки посредством устройства оценки размеров. Процесс 157 оценки параметров размеров принимает значение D231 уникального идентификатора предмета, объединенные данные D256 с известными значениями положения D148 в системе перемещения и выдает данные D166 о размерах со значением D231 уникального идентификатора предмета (и положением в системе перемещения) на другие части системы (в частности на формирователь 200 описания предметов поо фиг.8 и 9).
[00176] Процесс 146 отделения предмета улучшает достоверность выходных данных системы. В одном из примеров реализации сбой разделителя 140 предметов останавливает все операции системы, поскольку система не может определять количество предметов в пространстве для измерений или положение таких предметов, и, таким образом, система не знает, что делать с данными от датчиков параметров. Однако при возникновении ошибки только в части системы для отделения предмета нет необходимости в остановке этой системы. Процесс 146 отделения предмета обеспечивает возможность продолжения функционирования разделителя 140 предметов при остановке функционирования камеры линейного сканирования с верхним обзором с использованием данных световой завесы и/или профиля D247 с минимальной высотой для каждого предмета.
[00177] В противном случае, при возникновении ошибки в устройстве 154 оценки размеров и при продолжении выполнения обнаружения контура камерой линейного сканирования с верхним обзором и/или световой завесы, будут выданы нижние контуры D244, а не профиль D247 с минимальной высотой. Система может продолжать работать в ограниченном режиме, поскольку высоты предметов не доступны для идентификации предмета. Однако все еще возможно определение веса предмета, его длины и ширины, причем предметы не будут в целом проходить необнаруженными через пространство для измерений даже при увеличении количества искючений.
Датчик 170 веса
[00178] На фиг.12 схематически показан датчик 170 веса. Датчик 170 веса содержит весы 172 для взвешивания при перемещении и формирователь 174 веса. Весы 172 для взвешивания при перемещении содержат датчики объектов (датчик 173А объектов вводящей конвейерной ленты, датчик 173В объектов на входе пространства для измерений и датчик 173С объектов на выходе пространства для измерений показаны) и ячейки 175А, 175В, 175С и 175D нагрузки.
[00179] Датчики объектов, такой как датчик 173А объектов вводящей конвейерной ленты, датчик 173В объектов на входе пространства для измерений и датчик 173С объектов на выходе пространства для измерений, обеспечивают возможность отслеживания формирователем веса, какие предметы расположены на весах 172 для взвешивания при перемещении в заданное время. Датчик 173В объектов на входе пространства для измерений расположен рядом с вводящим концом пространства для измерений. Датчик 173С объектов на выходе пространства для измерений, расположенный рядом с выводящим концом пространства для измерений, вместе с датчиком 173В объектов на входе пространства для измерений обеспечивает загрузку данных для обеспечения возможности точного расчета системой веса множества предметов в пространстве для измерений в заданное время. Датчик 173А объектов вводящей конвейерной ленты расположен на несколько дюймов выше от вводящего конца конвейерной ленты пространства для измерений и обеспечивает дополнительный режим работы, при котором вводящая конвейерная лента может быть остановлена.
[00180] Другими словами, введение датчиков объектов обеспечивает возможность оценки системой веса большинства отдельных предметов путем объединения текущего общего веса на конвейерной ленте пространства для измерений (не показано на фиг.12) со значениями положения D148 в системе перемещения. Однако в некоторых примерах реализации точные данные D191 о весе не могут быть измерены посредством формирователя 174 веса при входе предметов в пространство для измерений с одновременным выходом других предметов. Таким образом, в этих примерах реализации датчики объектов могут быть применены для предотвращения одновременной загрузки и выгрузки предметов с весов 172 для взвешивания при перемещении. Другими словами, логическое устройство 176 для определения положения объекта, после приема положения D148 в системе перемещения и данных от датчика 173А объектов вводящей конвейерной ленты, датчика 173В объектов на входе пространства для измерений и датчика 173С объектов на выходе пространства для измерений, может определить, что предмет будет входить в пространство для измерений в момент времени, идентичный времени выхода предмета из пространства для измерений, и может передать сигнал системе перемещения предотвращать прохождение любых новых предметов в пространство для измерений при наличии предмета приблизительно на выходе из пространства для измерений. В других примерах реализации, логическое устройство для определения положения объекта может также останавливать конвейерную ленту пространства для измерений, например, для случая, в котором не было времени на регулировку весов после загрузки нового предмета. Логическое устройство 176 для определения положения объекта передает сигналы D115 приведения в действие и остановки в процесс 178 вычисления разности и среднего при условии расчета логическим устройством среднего значения и изменений в исходных измерительных данных, принятых от ячеек 175 нагрузки для обеспечения выполнения расчетов в надлежащее время.
[00181] Следует отметить, что остановка и приведение в действие конвеерных лент для предотвращения загрузки и/или выгрузки предметов из пространства для измерений не имеет негативных воздействий на измерения, выполненные посредством системы; исходя из перспективы остановки в пространстве для измерений, вводящая конвейерная лента только рассредоточивает предметы на конвейерной ленте пространства для измерений, а остановка конвейерной ленты пространства для измерений вносит все этапы цифровой обработки в режим временной остановки, который может быть перезапущен при повторном приведении ленты в действие.
[00182] Согласно фиг.12, логическое устройство 176 для определения положения объекта дополнительно использует данные, принятые от датчиков объектов вместе с положением D148 в системе перемещения для выдачи управляющих команд D50 для управления лентой. Эти команды переданы на датчик 120 положения в системе перемещения (см. фиг.9), причем в одном из примеров реализации выполнены управляющие устройства для управления двигателями. Например, с использованием данных, принятых от датчика 173С объектов в пространстве для измерений, логическое устройство 176 для определения положения объекта может определить, что предмет расположен приблизительно на выходе из пространства для измерений. Для предотвращения входа предмета в пространство для измерений в идентичный момент времени, логическое устройство 176 для определения положения объекта может передавать управляющую команду 050 для управления лентой с обеспечением предотвращения перемещения предметов вводящей конвейерной лентой по направлению к пространству для измерений. Кроме того, или в альтернативном варианте, управляющие команды D50 для управления лентой могут включать увеличение или уменьшение скорости конвеерных лент для ограничения количества предметов, которые оператор системы 25 может физически разместить на вводящей конвейерной ленте. Аналогично, в некоторых примерах реализации весы 172 для взвешивания при перемещении могут требовать время на периодическую самокалибровку, при которой предотвращена возможность расположения предметов на конвейерной ленте прохода для сканирования с обеспечением возможности их возврата к своему собственному весу для поддержания точности. Данное калибровочное условие достигнуто путем остановки вводящей конвейерной ленты. Другие управляющие команды D50 для управления лентой могут быть переданы логическим устройством 176 для определения положения объекта в зависимости от предполагаемого конкретного применения.
[00183] Ячейки 175А, 175В, 175С и 175D нагрузки расположены по траектории действия нагрузок и обычно поддерживают конвейерную ленту пространства для измерений (не показано на фиг.12, однако показано по меньшей мере на фиг.2В). Каждая ячейка нагрузки создает электрический сигнал, пропорциональный силе сжатия, приложенной к ячейке нагрузки. В некоторых примерах реализации ячейки 175А, 175В, 175С и 175D нагрузки оцифрованы с высокой частотой дискретизации (например, 4000 отсчетов в секунду) до их передачи для обработки формирователем 174 веса.
[00184] Отсчеты для ячеек нагрузки с высокой частотой дискретизации приняты процессом 177 суммирования, в котором происходит суммирование сигналов от ячеек нагрузки и их масштабирование для получения данных об общем весе весов 172 для взвешивания при перемещении и о любых предметах на весах 172 для взвешивания при перемещении. Данные об общем весе D190 от процесса 177 суммирования при необходимости отправлены в базу данных для ранее записанных данных на этапе D190. Кроме того, данная сумма пропущена через фильтр нижних частот (или усреднена) для улучшения соотношения сигнал-шум и получения более точного значения общего веса в процессе 178 вычисления разности и среднего. Количество цифровых отсчетов, включенных в среднее, расчитанное в процессе 178 вычисления разности и среднего, ограничено количеством отсчетов, взятых при стабильном весе на весах 172 для взвешивания при перемещении. Например, если только один предмет был загружен на конвейерную ленту пространства для измерений, то стабильный период проходит от момента, в который предмет полностью расположен на конвейерной ленте пространства для измерений до момента, в который происходит удаление предмета с конвейерной ленты пространства для измерений. При расположении на конвейерной ленте пространства для измерений более одного предмета в заданное время, стабильные периоды ограничены временем, в которое не происходит загрузки или удаления предмета с конвейерной ленты пространства для измерений. При условии отсутствия помех, формирователь веса мог бы идентифицировать стабильные периоды посредством только одних данных. Однако формирователь веса обычно работает при наличие некоторого шума, но ни при его значительной величине. Таким образом, датчики объектов 173А, 173В и 173С сообщают формирователю веса (через логическое устройство 176 для определения положения объекта) о загрузке предметов или их выгрузке с конвейерной ленты пространства для измерений для обеспечения надлежащего усреднения. Следует отметить, что несмотря на то, что терминология, использованная в настоящей заявке, предлагает расчеты по времени, в одном из примеров реализации системный процесс не включает синхронизирующий сигнал, а скорее синхронизирован только посредством инкрементных перемещений прохода для сканирования конвейерной ленты. Таким образом, стабильный период может быть продлен путем остановки конвейерной ленты прохода для сканирования и будет происходить дальнейшее увеличение фактического числа отсчетов в среднем на частоте дискретизации данных (4000 отсчетов в секунду в одном из примеров реализации).
[00185] Кроме того, процесс 178 вычисления среднего и разницы, управлемый сигналами D115 приведения в действие и остановки, выполняет операцию вычисления разницы между значениями веса, полученными до загрузки и/или выгрузки предмета с весов 172 и после загрузки и/или выгрузки предмета с весов 172. Полученные таким образом значения веса присвоены предмету или предметам, загруженным и/или выгруженным с весов 172 при мгновенном перемещении. Существует несколько альтернативных подходов для выполнения функции вычисления разницы, которая может быть использована для получения по существу идентичных данных D191 о весе. Выбор между этими альтернативами в целом определен доступными аппаратными средствами и ресурсами для цифровой обработки и режимами работы (например, соотношением сигнал-шум ячейки нагрузки, сдвига ячейки нагрузки и т.п.). Один из конкретных подходов описан далее согласно фиг.13.
[00186] Согласно фиг.12, значения веса D191A переданы от процесса 178 вычисления среднего и разницы на процесс 179 присвоения веса, причем значения веса D191A объединены с данными D113 о положении объекта, которые представляют собой данные, которые были созданы логическим устройством 176 для определения положения объекта. Следует отметить, что логическое устройство 176 для определения положения объекта не может идентифицировать отдельные предметы в ситуации перекрытия. Положения D113 объектов определены путем объединения сигналов включения и остановки от датчиков объектов с положениями D148 в системе перемещения. Сочетание весов предметов и положений объектов представляют собой данные D191 о весе объекта. Для неперекрывающихся предметов данные о весе предмета представляют собой вес предмета; для перекрывающихся предметов данные о весе предмета представляют собой общий вес более одного предмета. Данные D191 о весе предмета переданы на формирователь 200 описания предметов. При необходимости, непрерывный поток данных D190 об общем весе передан в базу данных 350 для ранее записанных данных (согласно фиг.8).
[00187] Согласно приведенному выше описанию, различные подходы доступны для расчета веса отдельных предметов на весах 172. На фиг.13 показаны временные диаграммы, схематически отражающие выходные данные от элемента одного из примеров реализации датчика 170 веса, который схематически показан на фиг.12. Первая линия данных в верхней части по фиг.13 обеспечивает пример выходных данных процесса 177 суммирования. Вторая линия данных по фиг.13 обеспечивает пример выходных данных датчика 173А объектов вводящей конвейерной ленты. Третья линия данных по фиг.13 обеспечивает пример выходных данных датчика 173В объектов на входе пространства для измерений. Четвертая линия данных по фиг.13 обеспечивает пример выходных данных датчика 173С объектов на выходе пространства для измерений. Первая линия данных по фиг.13 показывает изменение, суммированные, оцифрованные сигналы ячеек нагрузки в качестве функции от времени, в которой допустима постоянная скорость системы перемещения. Вторая, третья и четвертая линии данных по фиг.13 отражают (бинарные) выходные данные трех датчиков объектов.
[00188] Во второй линии данных по фиг.13 предмет A показан обнаруженным первым посредством датчика 173А объектов вводящей конвейерной ленты в третий и четвертый временные периоды. При удержании предмета A на вводящей конвейерной ленте (показан обнаруженным посредством датчика 173А объектов вводящей конвейерной ленты), первая линия данных показывает, что датчик 170 веса не определяет значение веса, показанное постоянной (0; 0) от начала синхроимпульса в нуле до пятого временного интервала. Поскольку предмет A попадает на конвейерную ленту пространства для измерений, что показано в третей линии данных от пятой секунды до шестого временного интервала, то датчик 173В объектов на входе пространства для измерений определяет наличие предмета А. Вес предмета А записан посредством формирователя веса, что показано от приблизительно точки (5; 0) до приблизительно точки (6; 3) на первой линии данных на фиг.13. После окончательного пересечения предметом A промежутка ленты и расположения всего предмета A на конвейерной ленте пространства для измерений, датчик 170 веса показывает вес предмета A в виде неизменной величины от приблизительно точки (6; 3) до приблизительно точки (11,5; 3). При выявлении логическим устройством 176 положения предмета, процесс 178 вычисления среднего и разницы усредняет сигналы ячеек нагрузки в первом показанном интервале допустимого усреднения и получает разницу между значением веса 3, полученным в конце первого интервала допустимого усреднения, и значением веса 0, полученным только до загрузки предмета A на весы (показано посредством датчиков 173А и 173В объектов).
[00189] Согласно второй линии данных, от 9,5 временного интервала после приведения в действие системы до приблизительно 11 временного интервала, датчик 173А объектов вводящей конвейерной ленты определяет наличие еще одного предмета B на вводящей конвейерной ленте. Поскольку предмет B входят в пространство для измерений на конвейерной ленте пространства для измерений, то датчик 173В объектов на входе пространства для измерений определяет наличие предмета B от приблизительно 11,5 до приблизительно 13,5 на временном интервале по оси x. Общий вес предмета A и предмета B записан посредством датчика 170 веса, что показано от приблизительно точки (11,5; 3) до точки приблизительно (13,5; 9) на первой линии данных. После окончательного пересечения предметом B промежутка ленты и расположения всего этого предмета на конвейерной ленте пространства для измерений, не происходит изменения общего веса предмета A и предмета B от приблизительно точки (13,5; 9) до приблизительно точки (20; 9). При выявлении логическим устройством 176 для определения положения объекта, процесс 178 вычисления среднего и разницы усредняет сигналы ячеек нагрузки во втором показанном интервале допустимого усреднения и получает разницу между значением веса 9, полученным в конце второго интервала допустимого усреднения, и значением веса 3, предварительно полученным для предмета A. Иными словами, поскольку датчику веса 170 известно, что предмет А весит приблизительно три единицы измерения, а общий вес предмета A и предмета B составляет девять единиц измерения, то затем система рассчитывает, что предмет В весит приблизительно шесть единиц измерения.
[00190] Согласно четвертой линии данных по фиг.13, от 20 временного интервала до 21 временного интервала после приведения системы в действие, датчик 173С объектов на выходе пространства для измерений определяет наличие предмета A, выходящего из пространства для измерений, на конвейерной ленте пространства для измерений. Поскольку предмет A выходит из пространства для измерений на отводящей конвейерной ленте, то датчик 170 веса определяет уменьшение значения веса от приблизительно точки (20; 9) до приблизительно точки (21; 6). Таким образом, датчик 170 веса может проверить вес предмета A. Поскольку значение веса уменьшено приблизительно с 9 единиц измерения до приблизительно 6 единиц измерения при выходе предмета A из пространства для измерений, то предмет A весит приблизительно 3 единицы измерения.
[00191] После полного выхода предмета A из пространства для измерений и его расположения на отводящей конвейерной ленте, датчик 170 веса показывает вес предмета B в качестве неизменной величины от приблизительно точки (21; 6) до приблизительно точки (27; 6). Датчик 170 веса может снова проверить свой первоначальный расчет значения веса для предмета B путем определения статистического значения веса приблизительно шести объектов в период времени, в который на конвейерной ленте пространства для измерений обнаружен только предмет В. Согласно четвертому линейному графику, с 27 временного интервала до 29 временного интервала после приведения системы в действие, датчик 173С объектов на выходе пространства для измерений определяет наличие предмета B, выходящего из пространства для измерений, на конвейерной ленте пространства для измерений. Поскольку предмет B выходит из пространства для измерений на отводящей конвейерной ленте, то датчик 170 веса определяет уменьшение значения веса от приблизительно точки (27; 6) до приблизительно точки (29; 0). Вычитание 6 от 0 подтверждает, что предмет, который в настоящий момент времени выходит из пространства для измерений (предмет B), весит 6 единиц измерения.
[00192] Датчики веса с ячейками нагрузки часто показывают дрейф смещения нуля во времени и с изменением температуры. Данный потенциальный дрейф схематически показан в первой линии данных по фиг.13 для временных интервалов после 29. В одном из примеров реализации системы, данный дрейф автоматически сброшен в периоды времени, в которые предметы не расположены на весах, что выявлено логическим устройством 176 для определения положения объекта.
[00193] Подход расчета описанный выше может привести к ошибке в работе надлежащим образом при загрузке одного предмета на весы в момент времени, идентичный моменту времени выгрузки второго предмета. Для предотвращения данной ситуации в одном из примеров реализации логическое устройство 176 для определения положения объекта и условие «И» для датчика 173А объектов вводящей конвейерной ленты и датчика 173С объектов на выходе пространства для измерений создает команду для остановки вводящей конвейерной ленты до выгрузки существующего предмета из пространства для измерений. Данная управляющая команда D50 ленточного двигателя может быть передана на обрабатывающее устройство 127 для датчика перемещения (см. фиг.9), причем для удобства могут быть выполнены управляющие устройства для управления двигателями.
[00194] Согласно приведенному выше описанию, существует множество альтернативных подходов для обработки сигналов D190 об общем весе для оценки веса отдельных предметов при их неразделенном расположении на весах, в целом включающих выполнение оценок веса до, во время и/или после попадания каждого предмета на весы и/или удаления с них. Кроме того, существует множество альтернативных подходов, которые в конкретных условиях работы могут оценивать вес отдельных предметов даже при их частичном перекрытии. Например, рассмотрим общие значения веса, показанные в первой линии данных по фиг.13. Наклон линий перехода между интервалами допустимого усреднения пропорцональны весам предметов, загруженных на весы или выгруженных с них. При загрузке на высе двух частично перекрывающихся предметов, происходит изменение наклона линии перехода, поскольку произошло изменение количества загружаемых предметов. Таким образом, при условии отсутствия помех, обычная задача состоит в распределении общего веса, измеренного в стабильный период для двух перекрывающихся предметов, которые загружены на весы.
Процесс геометрического объединения, возникающий в формирователе 200 описания предметов
[00195] На фиг.14 показана схема потока данных для формирователя 200 описания предметов, выполняющего процесс объединения по геометрическим размерам. Формирователь 200 описания предметов объединяет значения параметров, соответствующие отдельному предмету, в описание предмета, причем эти значения параметров приняты от различных обрабатывающих устройств для обработки параметров. В примере реализации, показанном на фиг.14, значения параметров показаны в качестве значения D231 уникального идентификатора предмета, данных D166 о размерах, данных D191 о весе и данных D235 о цифровой метке, однако в данном примере реализации предусмотрены и другие значения параметров. Каждое значение параметров, согласно приведенному описанию для формирователя описания, включает соответствующие значения D148 положения в системе перемещения. Формирователь 200 описания предметов использует эти значения положения для сопоставления значений параметров, которые применимы к одному предмету. Такой набор совпавших значений параметров представляет собой описание предмета. Описание предмета, при завершении оценки формирователем 200 описания предметов, затем передено на обрабатывающее устройство для идентификации продукции.
[00196] Формирователь 200 описания предметов использует процедуру объединения данных на основании геометрических размеров с использованием библиотеки объединения объектов, описанной выше, для объединения асинхронно созданных значений параметров предметов. Время может быть использовано для соотнесения различных значений параметров с уникальным предметом, однако, поскольку различные значения параметров могли быть созданы в различное время вследствие перемещения предмета через проход для сканирования и поскольку скорость полотна может быть выполнена постоянной, то данный подход может быть сложен для реализации. Однако положение в системе перемещения, в котором расположен каждый предмет, представляет собой постоянный параметр, который соотнесен с одним предметом (после его входа в проход для сканирования) и который представляет собой значение положения в системе перемещения относительно известного опорного положения, в котором каждый датчик выполняет свои измерения. Таким образом, каждое измеренное значение параметра может соответствовать предмету, который был расположен в месте расположения датчика в момент измерения.
[00197] При работе системы, датчик 120 положения при перемещении (показан на фиг.9) непрерывно передает значение положения в системе перемещения на каждое обрабатывающее устройство для обработки параметров. Каждое обрабатывающее устройство для обработки параметров помечает значения параметров, которые оно создает, с использованием значения положения в системе перемещения, соответствующего текущим исходным измерительным данным, которые были собраны. Кроме того, разделитель 140 предметов и датчик 150 размеров (оба показаны на фиг.9 и 11) обеспечивают полнообъемное трехмерное положение для каждого отделенного предмета, что означает, что они предоставляют формирователю 200 описания предметов математическое описание, в котором поверхности каждого предмета расположены в пространстве камеры. Библиотека калибровочных данных 250 представляет собой запись, в которой в физическом пространстве отмечен каждый измерительный элемент в каждом датчике параметров. Процесс 202 преобразования преобразует математическое описание поверхностей каждого предмета от пространства камеры в физическое пространство с точными пространственными (x, y, z) данными о положении.
[00198] Процесс 202 преобразования использует подробные сведения о трехмерной области обзора каждого датчика параметров (например, вектор, описывающий, где в трехмерном пространстве отмечен каждый пиксел на каждой камере линейного сканирования). С использованием тех данных, формирователь 200 описания предметов может соотнести данные от множества датчиков параметров с предметом, который был расположен в конкретном положении в системе перемещения, при условии, что пространственная неопределенность каждого измерения координаты может оставаться достаточно малой. В одном из примеров реализации все пространственные измерения известны до степени точности, обычно составляющей менее приблизительно двух десятых дюйма. Наименьшие особенности, требующие пространственного объединения, представляют собой метки, которые при измерении на практике составляют по меньшей мере приблизительно шесть десятых дюйма при их наименьшем размере даже с минимальной шириной линий, которая меньше приблизительно 10 миллиметров, заданных сандартом GS1. Таким образом, даже наиболее маленькие метки могут быть уникальным образом соотнесены с пространственными точностями описанного примера реализации.
[00199] Первый этап, обеспечивающий возможность пространственного соотнесения значений параметров с конкретным предметом, состоит в калибровке основных пространственных положений для измерений каждого параметра датчика. Например, считыватель меток левой передней камеры линейного сканирования передает каждое значение цифровых меток вместе с количеством пикселов камеры линейного сканирования для центра меток и значение D148 положения в системе перемещения, при котором камера была приведена в действиие при считывании первой части меток. Формирователь описания предметов принимает эти данные и преобразует количество пикселов и положение в системе перемещения в основные пространственные координаты.
[00200] Для считывателя меток, пикселы, соответствующие четырем предельным точкам, задающим края видимой плоскости в пространстве для измерений, идентифицированы путем точного позиционирования двух целей изображения, по одному в каждом конце используемой камеры (в предельных концах пространства для измерений), и максимально близко к камере линейного сканирования в пространстве для измерений. Пикселы, отображающие эти цели, задают две точки на ближнем конце в видимой плоскости изображения. Происходит повторение процесса для двух предельных точек в дальнем конце области обзора каждой камеры линейного сканирования.
[00201] Например, для боковых камер линейного сканирования цели расположены только над конвейерной лентой прохода для измерений и на максимальной высоте предмета, максимально близко к входному зеркалу в пространстве для измерений. Идентичные цели отображены в дальнем конце диапазона камеры линейного сканирования. Координаты (x, y, z) каждой цели контрольного изображения записаны вместе с конкретной камерой и количеством пикселов камеры, в которых произошло появление изображения каждой цели. Три координаты задают плоскость изображения для такой камеры. Путем интерполирования и экстраполирования, отображающий луч для любого пиксела, входящего в состав камеры линейного сканирования, может быть получен от этих четырех точек, и могут быть отображены переданные три координаты камеры линейного сканирования, в которых она определила метку с использованием оптического луча, вдоль которого она была изображена.
[00202] Точные данные о пространственном (x, y, z) положении известны для каждой цели отображения при геометрической калибровке. Для некоторых примеров реализации система координат показана на фиг.3А и 3В. Геометрическая калибровка выполена вручную без применения данных от датчика положения при перемещении несмотря на то, что устройство оценки размеров использует эти данные для собственной обработки. Однако также возможна автоматизированная геометрическая калибровка с использованием данных от датчика положения при перемещении. В одном из примеров реализации данные о геометрической калибровке сохранены в библиотеке 250. Однако очевидно, что данные D201 геометрической калибровки не представляют собой необходимый элемент во всех примерах реализации. В примерах реализации, в которых это представлено, данные D201 о геометрической калибровке передана из библиотеки 250 в процесс 202 преобразования в формирователе 200 описания предметов.
[00203] Несмотря на то что только один луч камеры линейного сканирования не задает уникальным образом точную точку в пространстве, в котором была расположена метка, луч камеры линейного сканирования пересекает трехмерное представление самого предмета, которое обеспечено посредством разделителя 140 предметов и устройства 150 оценки размеров. Лучи камер линейного сканирования и трехмерные представления предметов создают однозначное соответствие между метками и предметами.
[00204] Еще один датчик параметров, использующий уровень геометрической калибровки, представляет собой устройство оценки веса. В описанном примере реализации, устройство оценки веса получает данные о положении предмета по оси Х от его датчиков объектов. Иными словами, в предметах по фиг.14, устройство оценки веса присваивает значение веса предмету A или B на основании выходных данных по меньшей мере одного датчика объектов на входе пространства для измерений, которые показывали места вдоль вертикальной ленты, в которые предметы были первоначально загружены на весы. Положения датчиков объектов могут быть откалиброваны вручную путем простого измерения их расстояний относительно координат устройства оценки размеров или автоматически откалиброваны с использованием подвижных предметов для калибровки и текущих положений в системе перемещения, переданных датчиком положения при перемещении.
[00205] Следует отметить, что в показанном примере реализации предметы загружены на весы 172 для взвешивания при перемещении до их наблюдения камерой исследуемой области. Аналогично, камера 88 линейного сканирования с верхним обзором (показано по меньшей мере на фиг.4А) может считывать метку предмета до его наблюдения камерой исследуемой области. Таким образом, измерения веса и считывания меток могут быть выполнены до того, как датчик 150 размеров 150 и разделитель 140 предметов (схематически показаны на фиг.11) определили какие предметы расположены в проходе для сканирования. При этом, функция системы для идентификации продукции также могла бы быть реализована с использованием датчика 150 размеров и камеры 132А линейного сканирования с верхним обзором, расположенных в конце прохода для сканирования, фактически с датчиками, расположенными в передней части прохода для сканирования. Расположение с передней стороны этих двух датчиков предпочтительно только для минимизации задержки на обработку, необходимую для формирования идентификатора. Иными словами, идентификация продукции может быть выполнена вскоре после выхода предмета из прохода для сканирования при наличии данных, собранных в передней части прохода для сканирования, а не в конце прохода для сканирования.
[00206] Устройству оценки веса известно только положение по оси X предметов, которые оно взвешивает. Два предмета, которые примыкают друг к другу (то есть, имеют общие положения по оси X и разные положения по оси Y) на весах для взвешивания при перемещении, может быть сложно взвесить по отдельности. Таким образом, полученный вес в данном случае представляет собой общий вес всех примыкающих друг к другу предметов в таком положении в системе перемещения (значение x). При поступлении значения веса в формирователь 200 описания предметов (схематически показано на фиг.14) с положением в системе перемещения, которое соответствует более одному предмету, формирователь 200 описания предметов в некоторых примерах реализации добавляет значение веса к описанию D167 предмета для каждого предмета вместе с указанием того, что это значение представляет собой общий вес. В других примерах реализации уникальный идентификатор предмета (уникальные идентификаторы предметов) для примыкающих друг к другу предметов также добавлены к описанию D167 предмета по описанным далее причинам.
[00207] Различные значения параметров, которые преобразованы посредством процесса 202 преобразования, становятся частично преобразованными значениями D70 параметров, которые затем переданы в очередь 207 данных. Очередь 207 данных представляет собой буфер с произвольным доступом, это означает, что она фактически не работает в системе типа первый на входе, первый на выходе. Поскольку на конвейерной ленте пространства для измерений в целом расположено множество предметов и поскольку каждый датчик параметров передает свои измеренные параметры по мере их распознавания, очередь 207 данных в любой точке времени содержит частично преобразованные значения D70 параметров от множества предметов, расположенных в порядке их поступления. Поскольку, например, задержка между временем физического прохождения метки предмета через поле обзора камеры линейного сканирования и временем создания считывателем меток соответствующих значений меток может сильно варьироваться, то возможно даже, что некоторые частично преобразованные значения D70 параметров не могут быть распознаны или интерпретированы до выхода предмета из системы 25.
[00208] Формирователь 200 описания предметов выполняет поиск для определения переданных частично преобразованных значений D70 параметров в очереди 207 данных, которые были измерены на поверхности или в положении предмета посредством процесса объединения по геомерическим размерам или совпадения по геометрическим параметрам.
[00209] Процесс объединения данных обрабатывающего устройства 300 для идентификации предметов зависит от датчика 150 размеров и разделителя 140 предметов. Разделитель 140 предметов определяет предметы, расположенные в пространстве для измерений (и присваивает им уникальный номер для отслеживания, в частности уникальный идентификатор предмета), а датчик 150 размеров создает данные о размерах, включая, без ограничения, профили с минимальной высотой с соответствующими нижними контурами. Данные от разделителя 140 предметов и датчика 150 размеров формируют основные входные данные в описании D167 предмета, создаваемом в формирователе 200 описания предметов. Другие значения параметров идентифицированы в качестве значений, принадлежащих предмету, и добавлены к описанию D167 предмета. В некоторых примерах реализации процесс объединения данных 215 принимает положение D148 в системе перемещения и доставляет запросы D149 на поиск изображений в процесс 138 извлечения участка в считывателе 130 меток по фиг.10.
[00210] Согласно приведенному выше описанию, значения параметров принятые формирователем 200 описания предметов от различных датчиков параметров, подвержены преобразованиям 202 и временно помещены в очередь 207 данных. Поскольку формирователь 200 описания предметов создает описание D167 предмета через процесс объединения данных 215, который сравнивает частично преобразованные значения D70 параметров с идентичным положением D148 в системе перемещения, он передает запрос D169 данных в очередь 207 данных для удаления частично преобразованного значения D70 параметров из очереди 207 данных для его замены соответствующим описанием D167 предмета. Таким образом, происходит непрерывное добавление частично преобразованных значений D70 параметров к очереди 207 данных или удаление из нее.
[00211] В итоге, описание D167 предмета передано на обрабатывающее устройство 300 для идентификации предметов. Формирователь 200 описания предметов передает файл с описанием D167 предмета на обрабатывающее устройство 300 для идентификации предметов в некой точке при обработке на основании по меньшей мере одного выбранного критерия. Критерий может включать, например, отправку описания D167 предмета для случая, в котором текущее положение в системе перемещения выходит за пределы положения предмета более чем на приблизительно 25% длины пространства для измерений. В одном из примеров реализации отправленный критерий может соответствовать положению ленты, которое меньше конкретного расстояния от конца ленты на выходе или равно ему.
[00212] Некоторые значения параметров никогда не связаны с каким-либо предметом и могут быть отнесены к утраченным значениям. Утраченные значения созданы, если, например, значение параметров задержано путем перезагрузки обрабатывающего устройства или если значение положения D148 в системе перемещения имеет погрешность.
Аналогично, при совершении предметом перемещения относительно конвеера, например катящейся бутылки или банки, могут быть утрачены конкретные значения. Накопление несовпавших значений параметров в очереди 207 данных вызывает ухудшение характеристик системы. В некоторых примерах реализации формирователь 200 описания предметов может включать функциональность по удалению значений параметров из очереди 207 данных за конкретный выбранный период времени. Решение удаления значений параметров зависит от того, существенно ли виртуальное положение нового частично преобразованного значения D70 параметров, поступающего в очередь 207 данных, лежит за пределами длины отводящей конвейерной ленты, например. Данное условие указало бы, что утраченное значение соответствует предмету, давно вышедшему из пространства для измерений.
Обрабатывающее устройство 300 для идентификации предметов
[00213] На фиг.15 показана схема потока данных для обрабатывающего устройства 300 для иидентификации предметов. Формирователь 200 описания предметов создает описание D167 предмета для каждого предмета, отделенного посредством разделителя предметов. Обрабатывающее устройство 300 для идентификации предметов открывает файл для каждого описания предметов D167, переданный ему формирователем 200 описания предметов. Описание D167 предмета включает перечень всех доступных измеренных значений параметров, собранных посредством системы. Основная функция, выполняемая обрабатывающим устройством 300 для идентификации предметов состоит в сравнении описания D167 предмета с набором описаний продукции, сохраненных в базе 310 данных с описаниями продукции, и принятии решения по предварительно заданным логическим правилам, если предмет является одним из той продукции. В некоторых примерах реализации описания продукции в базе 310 данных с описаниями продукции содержат идентичный тип данных о продукции, которые были собраны о предметах. Обычно, описания продукции включают значения цифровых меток, данные о весе и данные о размерах такой продукции. В некоторых примерах реализации описания продукции могут содержать другие значения параметров продукции, статистические данные о различных параметрах (например, стандартное отклонение веса), цифровые фотографии каждого продукта и т.п.
[00214] В одном из примеров реализации полигональное представление предмета может быть создано для пространства фокальной плоскости каждой камеры. Таким образом, для каждого объекта, существует множество полигонов, созданных в соответствии с каждым из обзоров камер для объекта. В качестве примера, для системы, имеющей семь перспективных видов было бы создано и отсортировано семь полигонов для использования в процессе объединения согласно приведенному далее описанию.
[00215] Обрабатывающее устройство 300 для идентификации предметов совершает попытку определения наилучшего совпадения между значениями неизвестных параметров предмета и базой данных (известных) параметров продукции. В некоторых примерах реализации значение меток (обычно штриховой код (UPC)) использовано в качестве первоначального запроса к базе данных. На основании предположения о нахождении точного совпадения меток в базе данных с описаниями продукции, обрабатывающее устройство 300 для идентификации предметов проверяет оставшиеся значения параметров для принятия решения является ли предмет продуктом, представленным посредством меток. Это подтверждает, что штриховой код (UPC) не был считан неправильно или испорчен. Согласно приведенному выше описанию, отдельные штриховые коды (UPC) (или другие коды) могут быть дополнительно оценены для уменьшения количества выборов возможных объектов, а в одном из примеров реализации небольшое количество выборов может быть предоставлено оператору для принятия решения.
[00216] Описание D167 предмета выполнено для процесса 305 создания запроса к базе данных, который сравнивает доступные параметры предметов для определения предмета на основании, например, полученной метки, веса и высоты. Когда запрос D209 сформирован, процесс 305 создания запроса к базе данных доставляет его в базу данных 310 с описаниями продукции, который в свою очередь передает результат D210 запроса в логический процесс 312 для идентификации продукции. Логическое устройство 312 для идентификации продукции сравнивает результат D210 запроса, который представляет собой описание продукта, с исходным описанием D167 предмета для принятия решения о схожести этих двух описаний в степени, достаточной для обнаружения идентификатора.
[00217] Обрабатывающее устройство 300 для идентификации предметов запрограммировано с использованием набора логических правил, посредством которых выполнена данная проверка. В некоторых примерах реализации правила представляют собой детерминированные правила (например, вес обязательно должен быть в пределах x% от номинального веса продукта). В других примерах реализации правила могут быть определены с использованием, например, нечеткой логики.
[00218] Нечеткая или адаптивная логика могут найти конкретное применение в логичеством устройстве 312 для идентификации продукции для решения необычных ситуаций. Например, некоторые предметы будут иметь множество значений цифровых меток, а конкретная продукция будет известна с наличием множества видимых меток, поскольку множество камер линейного сканирования формируют изображения каждого предмета и поскольку некоторые объекты имеют по меньшей мере две отдельных метки (например, сборная упаковка с водой, в которой каждая бутылка может иметь один штриховой код, и контейнер со сборными упаковками может иметь отличный штриховой код). В данном примере нечеткая логика может работать лучше, чем строгое правило, которое определяет, как обработаны противоречивые данные.
[00219] Несмотря на то, что в некоторых примерах реализации значение цифровой метки может представлять собой предпочтительное значение параметров для поиска в базе данных, существуют примеры, в которых процесс 305 создания запроса к базе данных использует по меньшей мере один из других значений параметров в первой попытке для выполнения попытки идентификации предмета. Например, в случаях, в которых метки считаны неправильно или были частично или полностью скрыты от камеры линейного сканирования, процесс 305 создания запроса к базе данных выполнен с возможностью программирования для использования других значений параметров, описанных ранее для точной идентификации предмета в качестве продукта. Например, если вес, форма и размер предмета были измерены с высокой степенью точности и были считаны некоторые из разрядов штрихового кода, то эти данные могут обеспечить возможность идентификации уникальной продукции в достаточной мере.
[00220] Выходные данные логического устройства 312 для идентификации продукции представляют собой описание продукта с вероятностью идентификации или указатель D232 исключений, который указывает на то, что не было обнаружено какого-либо совпадающего описания продукта. Отсутствие совпадения может возникать, например, в случаях, в которых предмет проанализирован таким образом, как будто он никогда не был введен в базу данных. Эти выходные данные переданы в процесс 314 принятия решения по продукту и/или исключению, в котором применен программируемый допустимый уровень. Если вероятность идентификации выше данного допустимого уровня, то данные D233 идентификации продукции и значение D231 уникального идентификатора предмета представляют собой выходные данные. В обычных примерах реализации, выходные данные при идентификации переданы в систему 400 розничной торговли. С другой стороны, если вероятность идентификации ниже допустимого уровня, то затем процесс 314 принятия решения по продукции и/или исключению соотносит указатель D232 исключения со значением D231 уникального идентификатора предмета. При необходимости, в некоторых примерах реализации, в которых предмет отмечен в качестве исключения, значение D231 уникального идентификатора предмета передано на обработчик исключений. Дополнительный обработчик 320 исключений может включать отсутствие выполнения каких-либо операций (например, обеспечивать возможность получения покупателем данного предмета бесплатно) с обеспечением передачи указания системному оператору для выполнения им действия или он мог бы включать выполнение операции автоматического повторного сканирования.
[00221] Еще одна дополнительная функция, представляющая собой часть обрабатывающего устройства для идентификации объекта, состоит в возможности обновления базы данных с описаниями продукции на основании значений новых параметров объектов. Например, среднее и стандартное отклонение веса продукта, которые представляют собой обычные параметры, сохраненные в базе данных 310 с описаниями продукции, могут быть уточнены с использованием новых данных о весе, собираемых при каждой идентификации конкретного продукта. В некоторых примерах реализации обрабатывающее устройство 300 для идентификации предметов обновляет свою базу данных 310 с описаниями продукции с использованием каждого значения параметра, которое он принимает и которое относится к предметам, проходящим через пространство для измерений. Процесс 313 обновления базы данных принимает значение D231 уникального идентификатора предмета и описание D167 предмета от процесса 305 создания запроса к базе данных и выполняет обновление базы данных при приеме описания D233 продукта и значения D231 уникального идентификатора предмета от процесса 314 принятия решения по продукции и/или исключению. Кроме того, процесс 313 обновления базы данных принимает уведомление в случае, в котором значение D231 уникального идентификатора предмета представляет собой исключение (указатель D232), так что он может стереть неточные описания D167 продукции, соответствующие значению исключения D231 для уникального идентификатора предмета.
[00222] Перед устранением неоднозначности множественного считывания, Объединяющее устройство применяет алгоритм «наилучшего совпадения» при однократном прохождении для присвоения штриховых кодов предмету в его запланированном положении на выходе (то есть, положение Y ленты, в котором Объединяющее устройство передает данные для предмета в подсистему на выходе для последующей передачи в систему розничной торговли). Алгоритм наилучшего совпадения для присвоения штриховых кодов использует в качестве входных данных 1) один предмет, для которого должны быть созданы выходные данные, 2) группу предметов, содержащую все предметы, которые необходимо рассмотреть при идентификации наилучшего совпадения штриховой код-предмет, причем предмет на выходе также представляет собой часть данной группы, и 3) группу штриховых кодов, содержащую все доступные штриховые коды, которые необходимо присвоить предмету на выходе.
[00223] Алгоритм работает путем последовательной проверки каждого штрихового кода в группе штриховых кодов и компьютерной обработки совпадения показателей (показатель качества) между штриховым кодом и всеми предметами в предоставленной группе предметов. После компьютерной обработки всех объединений штриховой код-предмет, алгоритм отбрасывает все объединения со значениями показателя качества, которые ниже конкретного предела (данный предел может быть получен эвристически и может быть обновлен в соответствии с реальной ситуацией в качестве установки пользовательских настроек или автоматически). Все оставшиеся объединения штриховой код-предмет затем отсортированы согласно расстоянию вдоль луча камеры, а совпадение с наименьшим таким расстоянием следует считать наиболее подходящим (логическое устройство не подходит для считывания штрихового кода на предмете, который расположен позади другого предмета, таким образом штриховой код, наиболее близкий к линзам камеры, более подходит для надлежащего соотнесения с передним предметом). Если предмет, идентифицированный в качестве наилучшего совпадения, идентичен предмету на выходе, то штриховой код присвоен данному предмету на выходе. В противном случае не происходит присвоения штрихового кода.
[00224] Несмотря на то, что в настоящей заявке данное изобретение было описанно в конкретных примерах его реализации/ и многие сведения были приведены для пояснения, специалистам в уровне техники очевидно, что обеспечена возможность модификации данного изобретения, а некоторые другие сведения, приведенные в настоящей заявке, могут быть значительно изменены без выхода за рамки сущности настоящего изобретения. Кроме того, следует принять к сведению, что конструктивные особенности или этапы способа, показанные или описанные в любом примере реализации в настоящей заявке, могут быть также использованы в других примерах реализации.
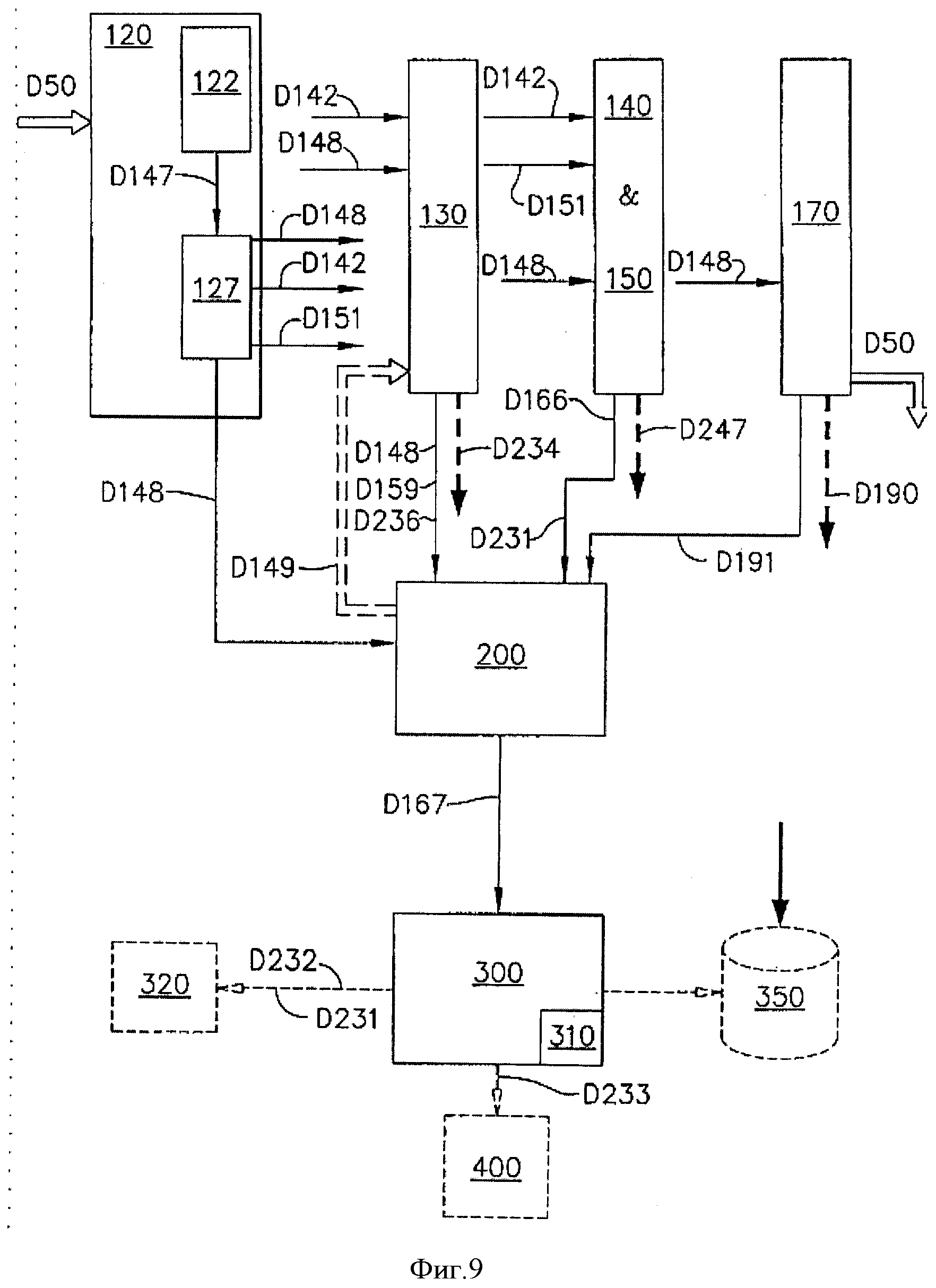
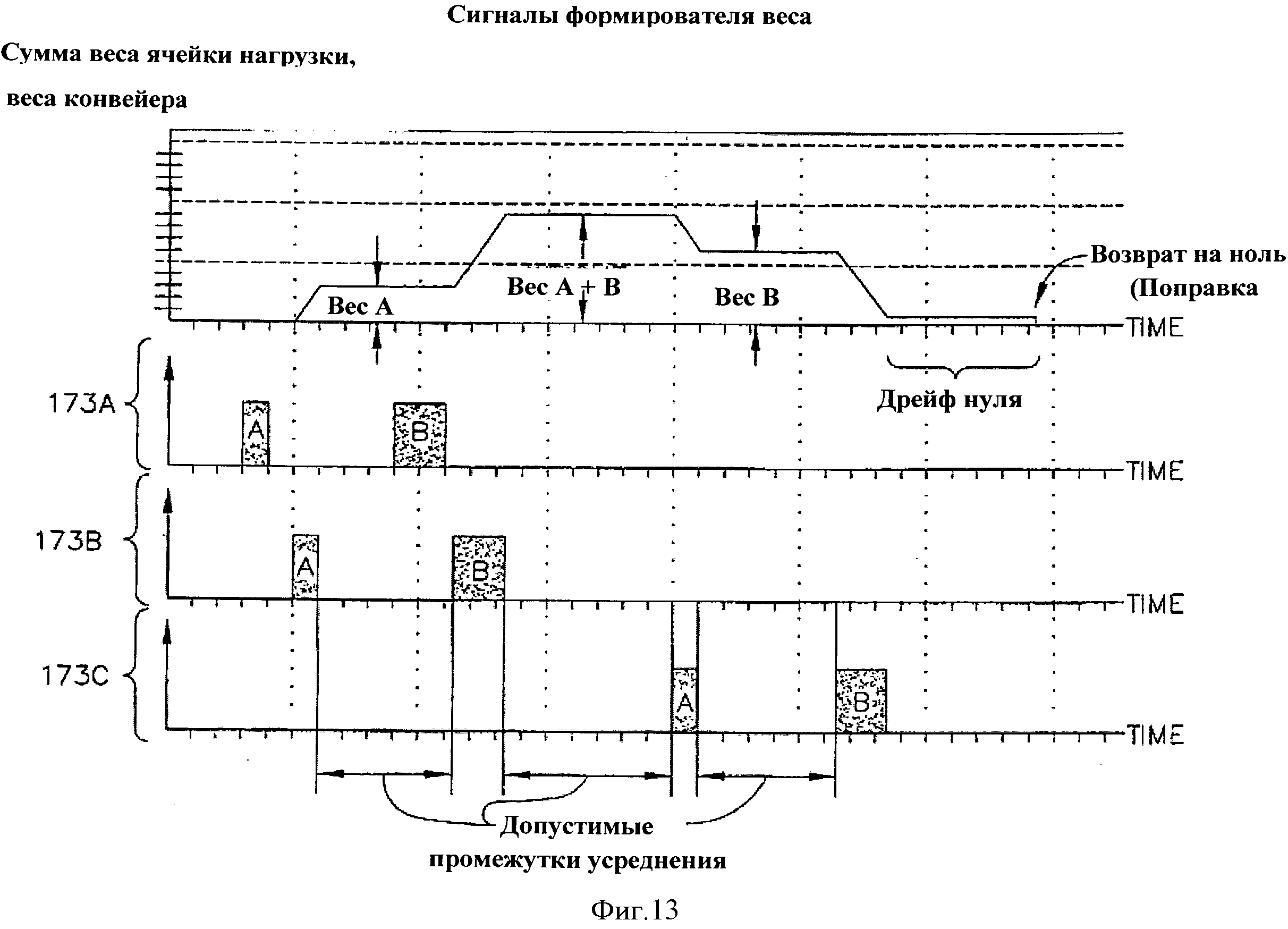
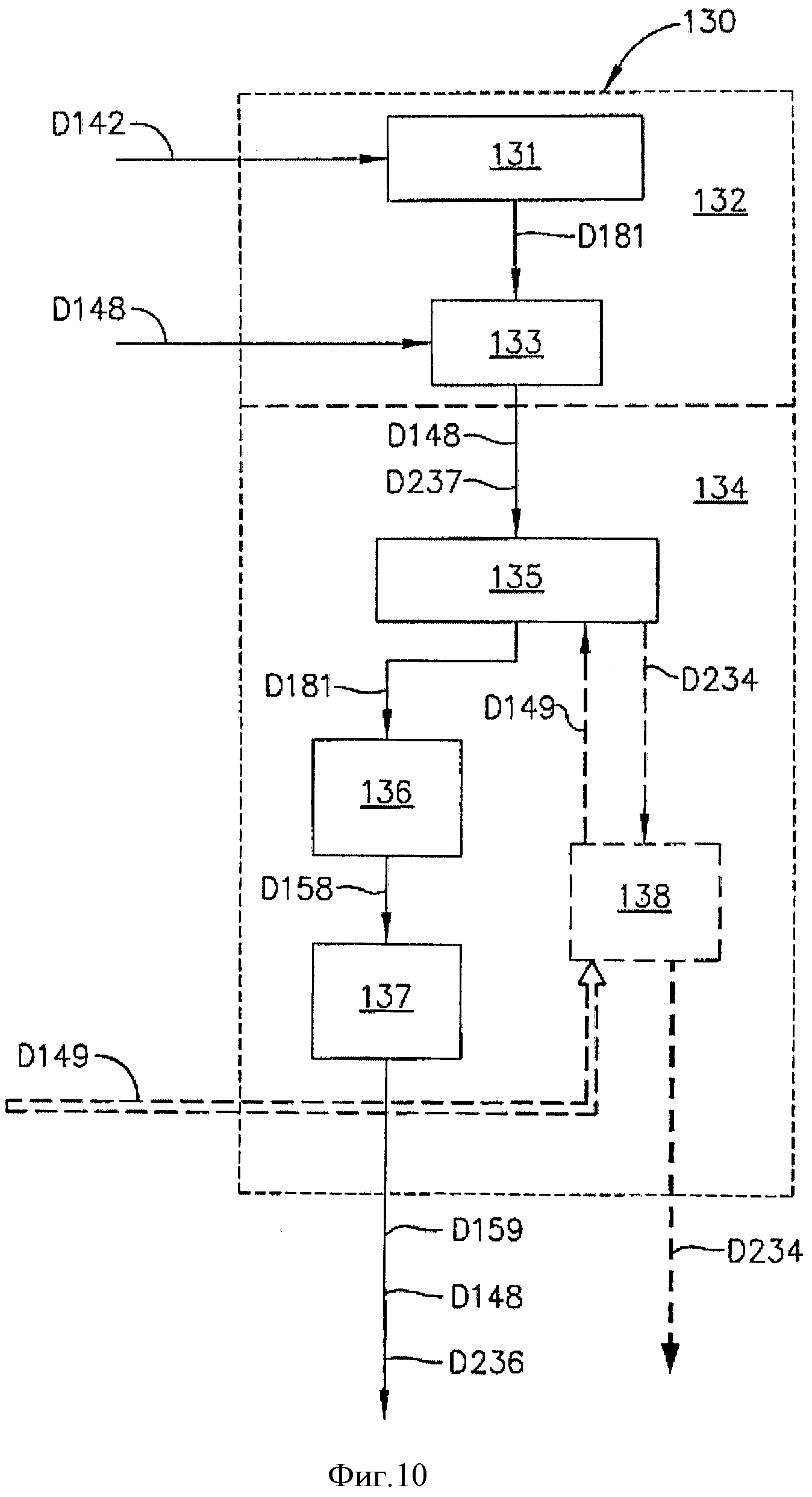
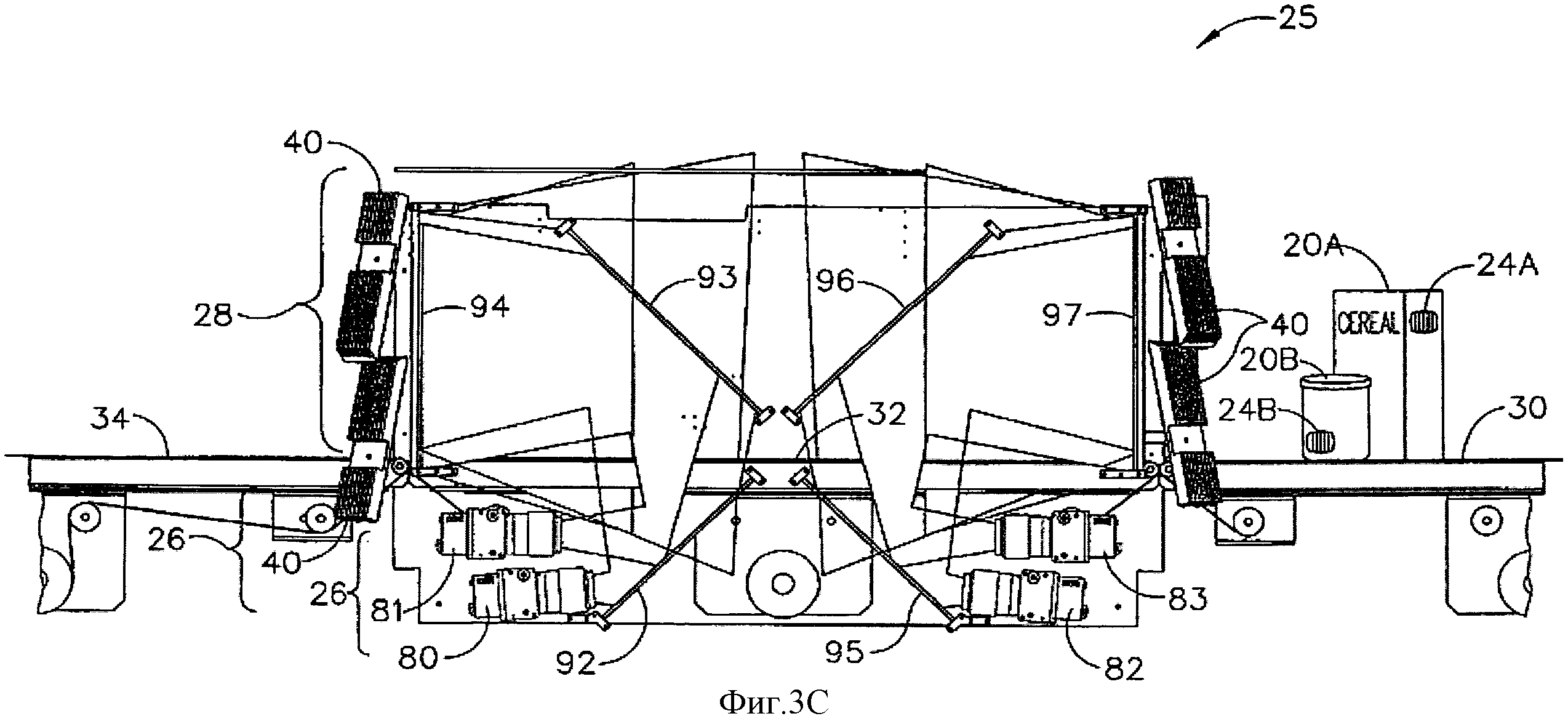
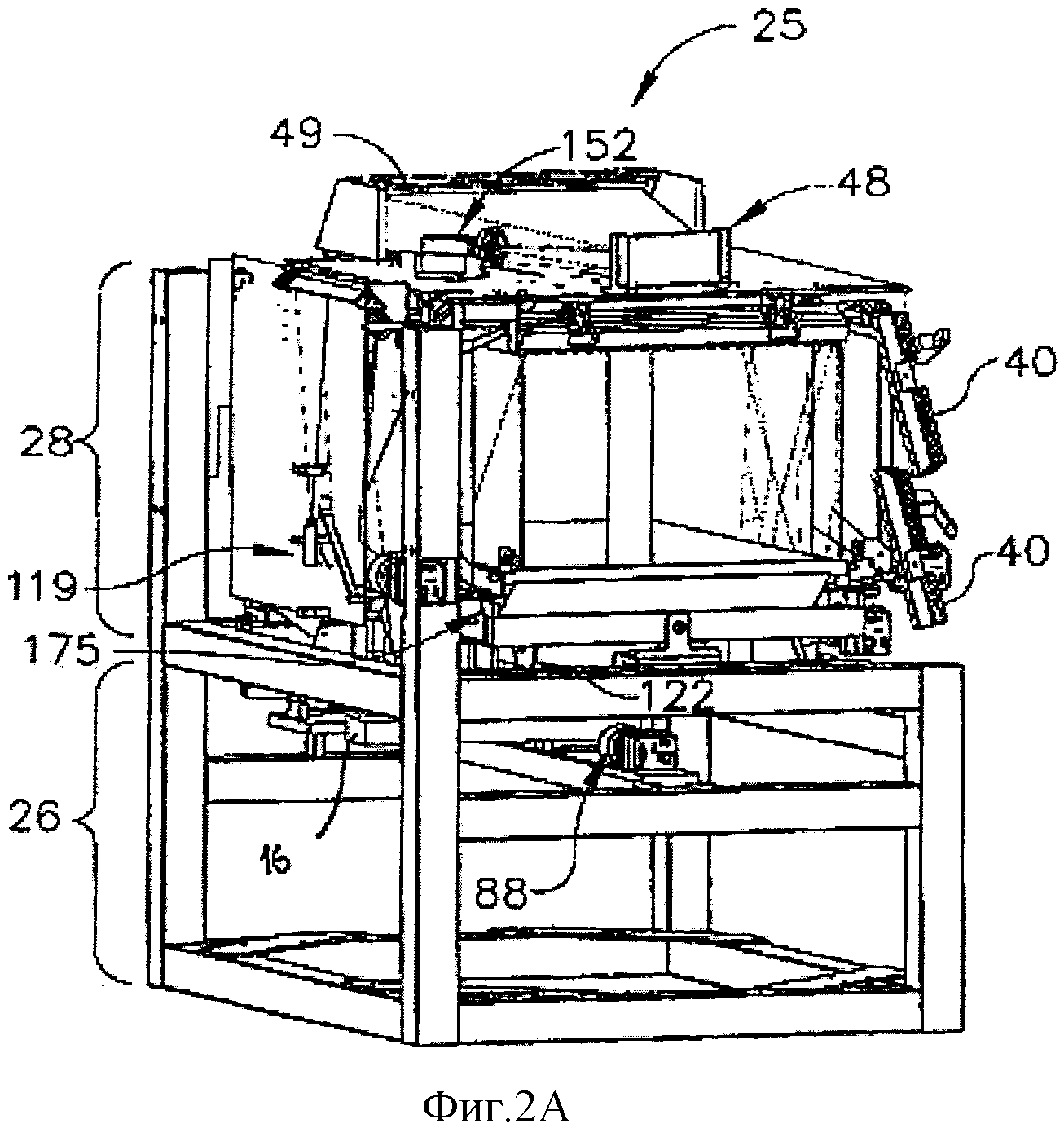
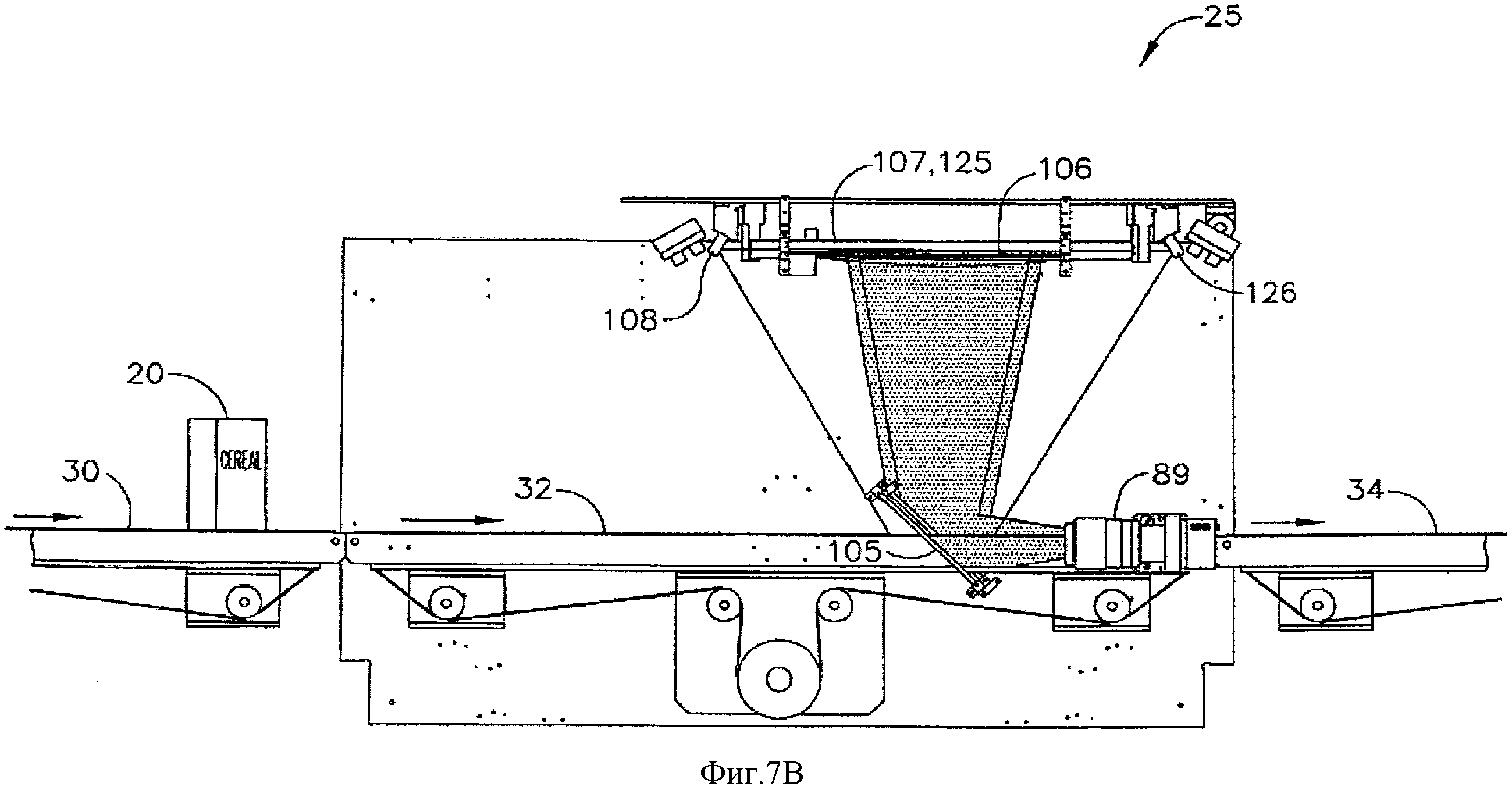
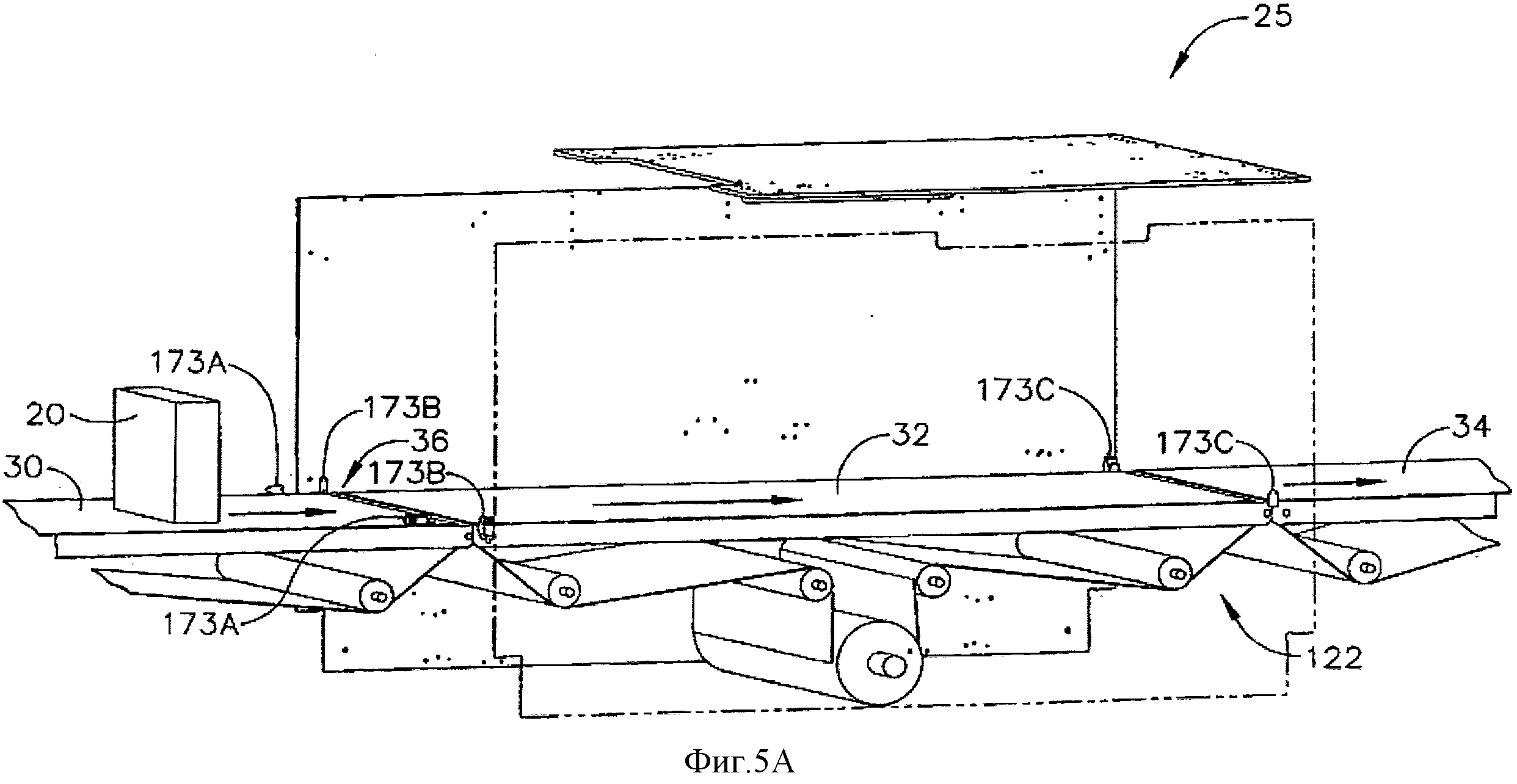
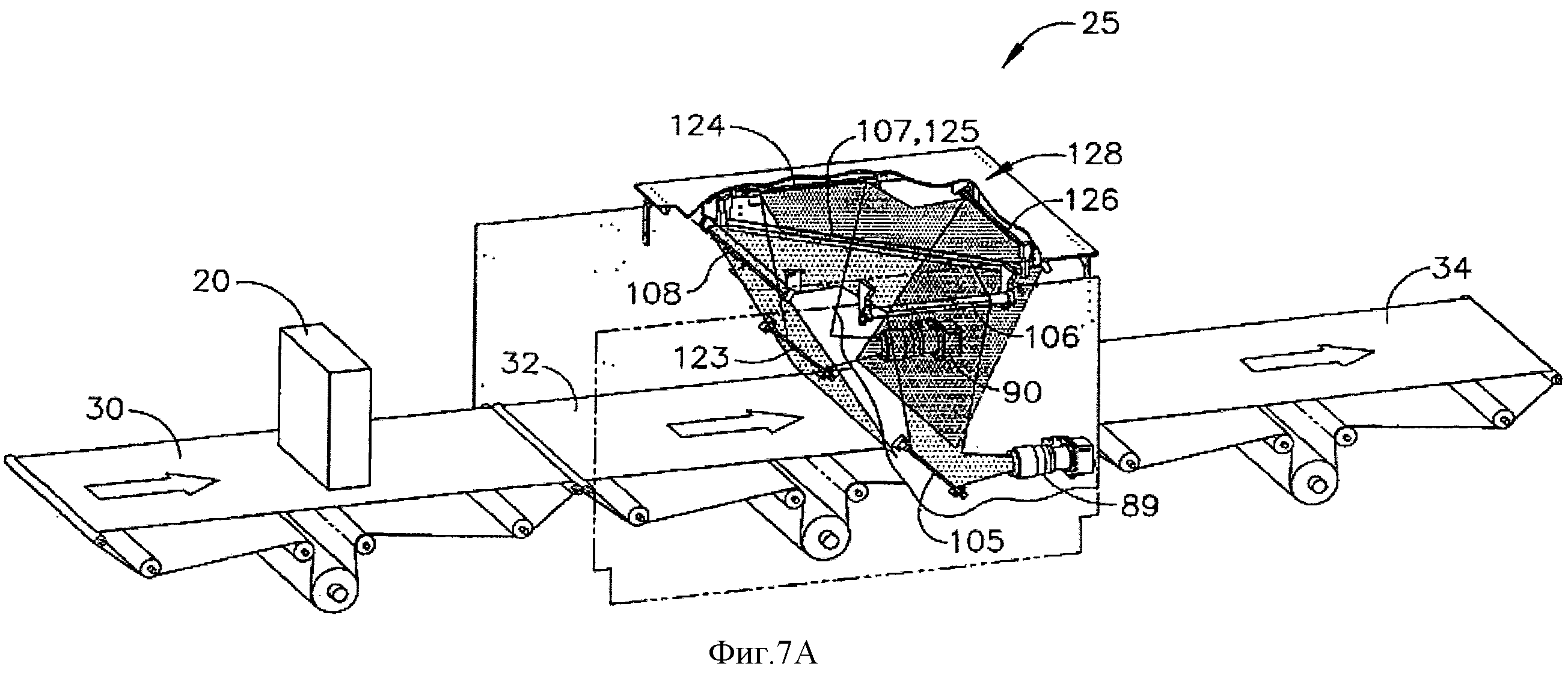
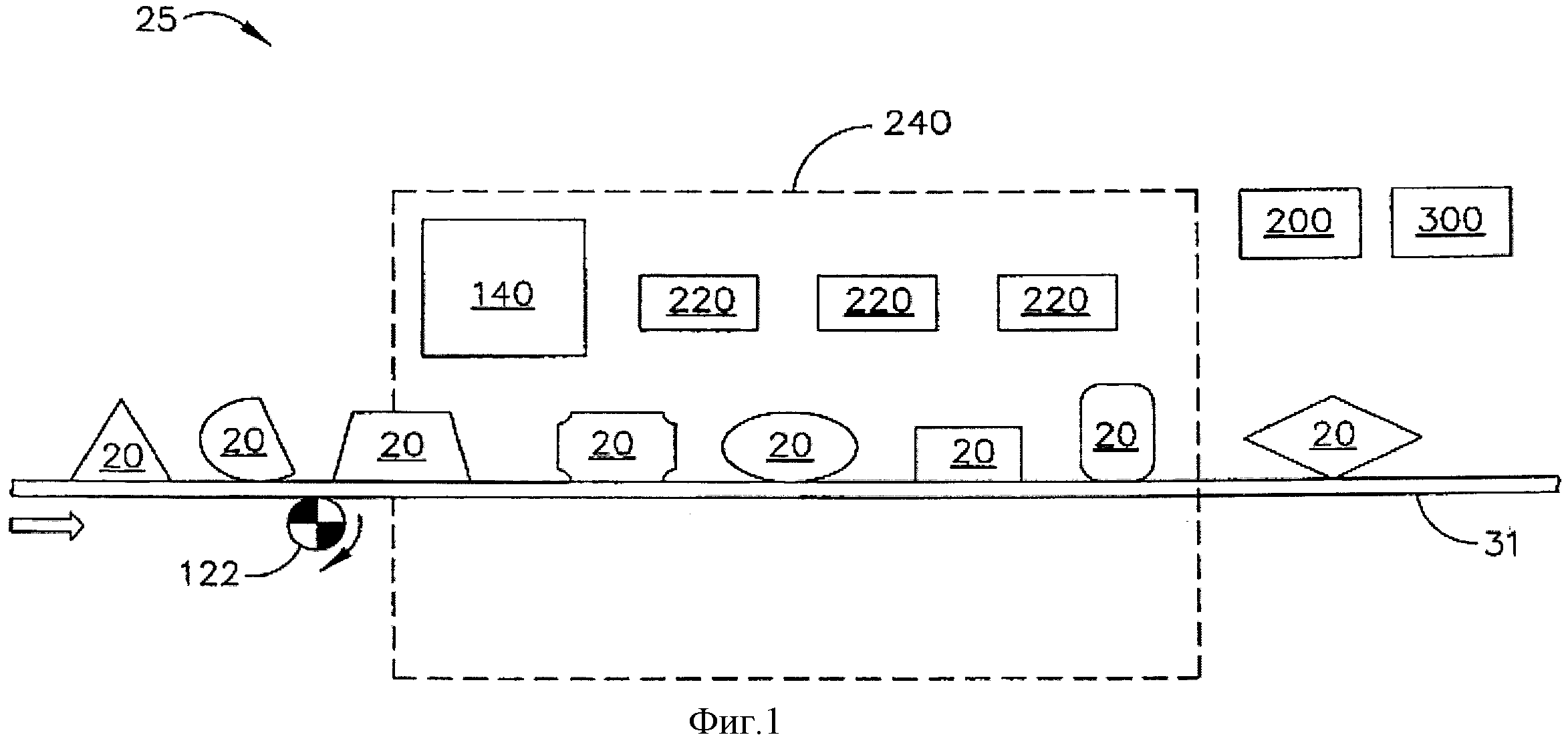
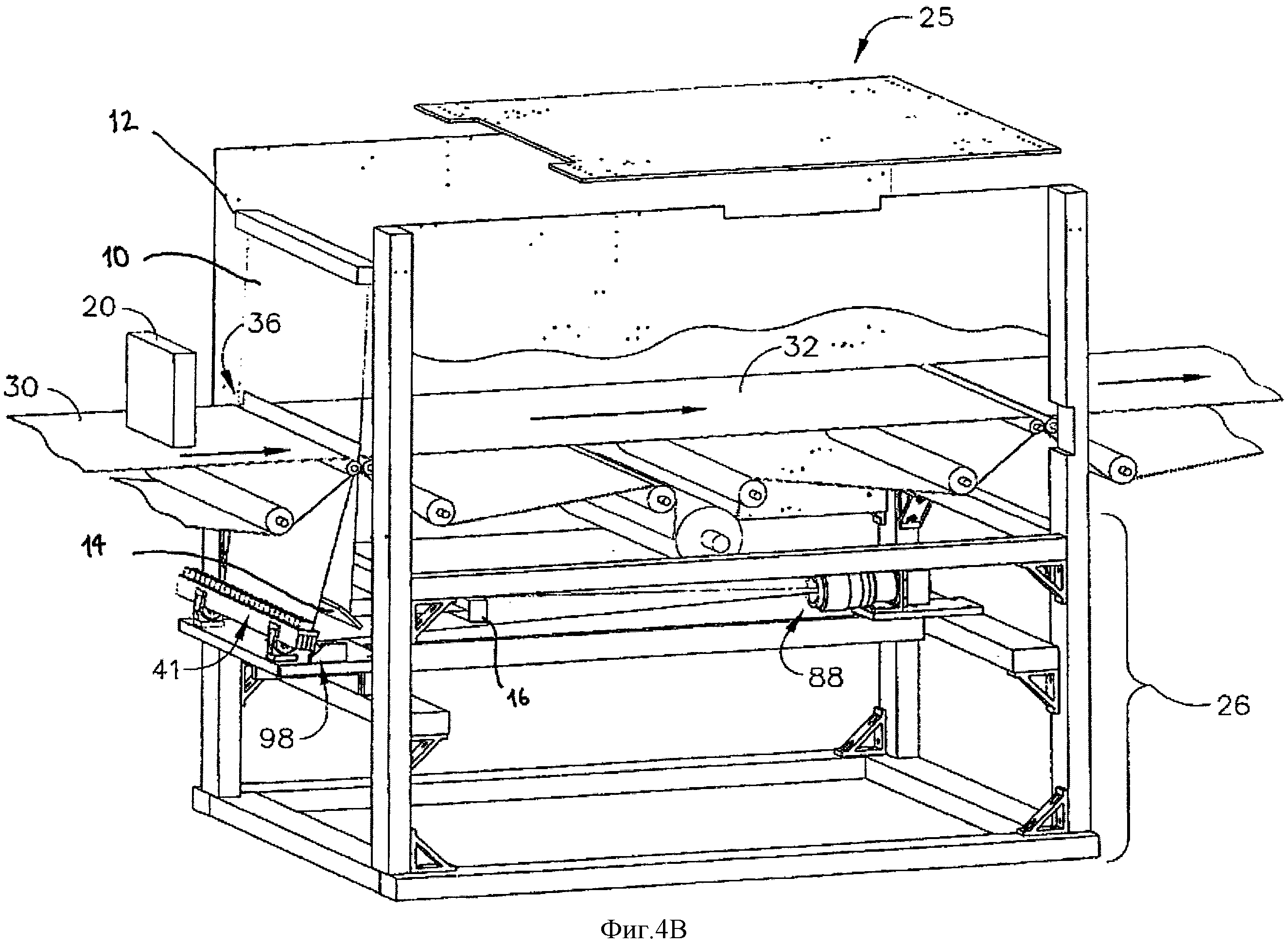
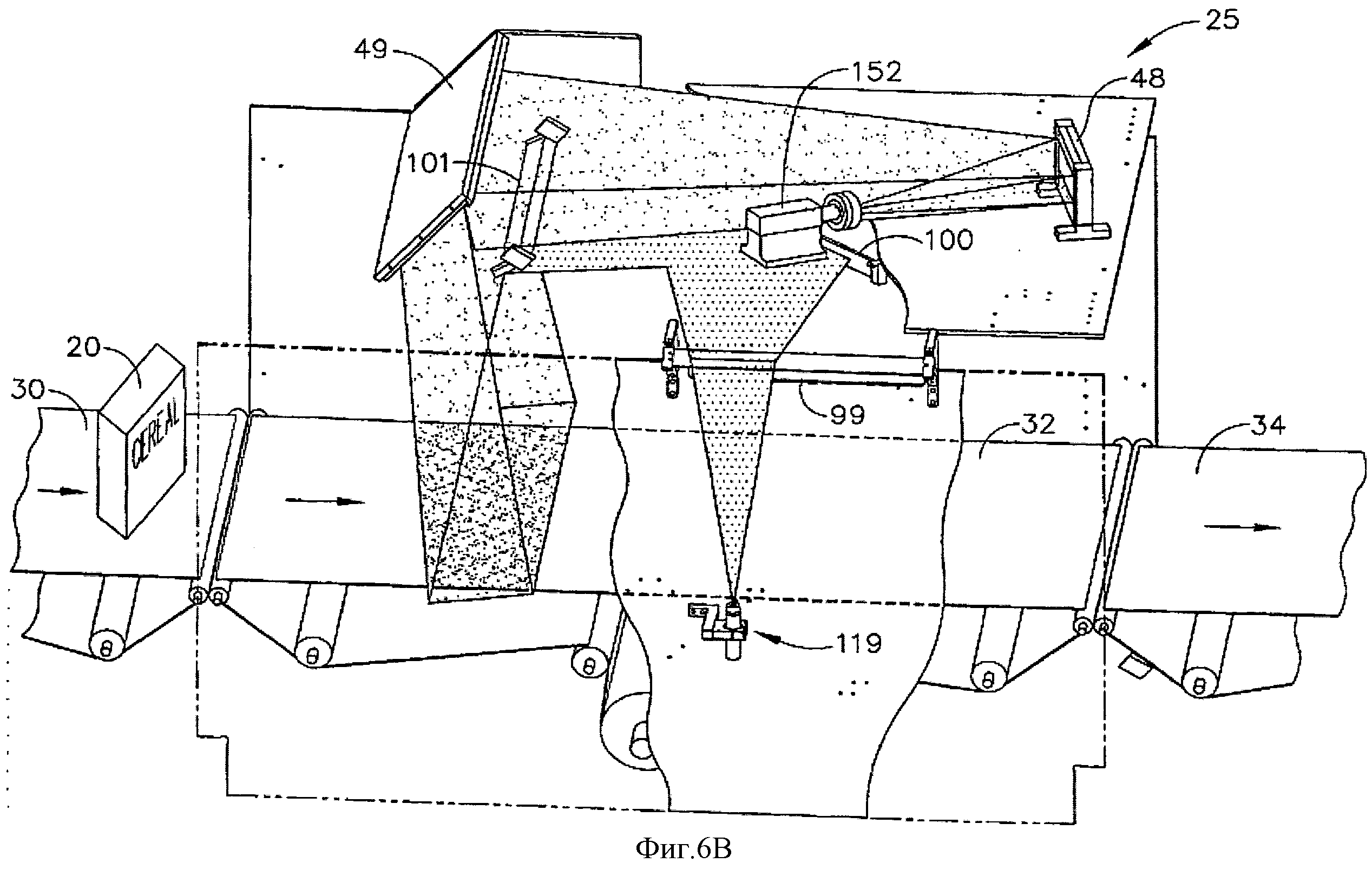
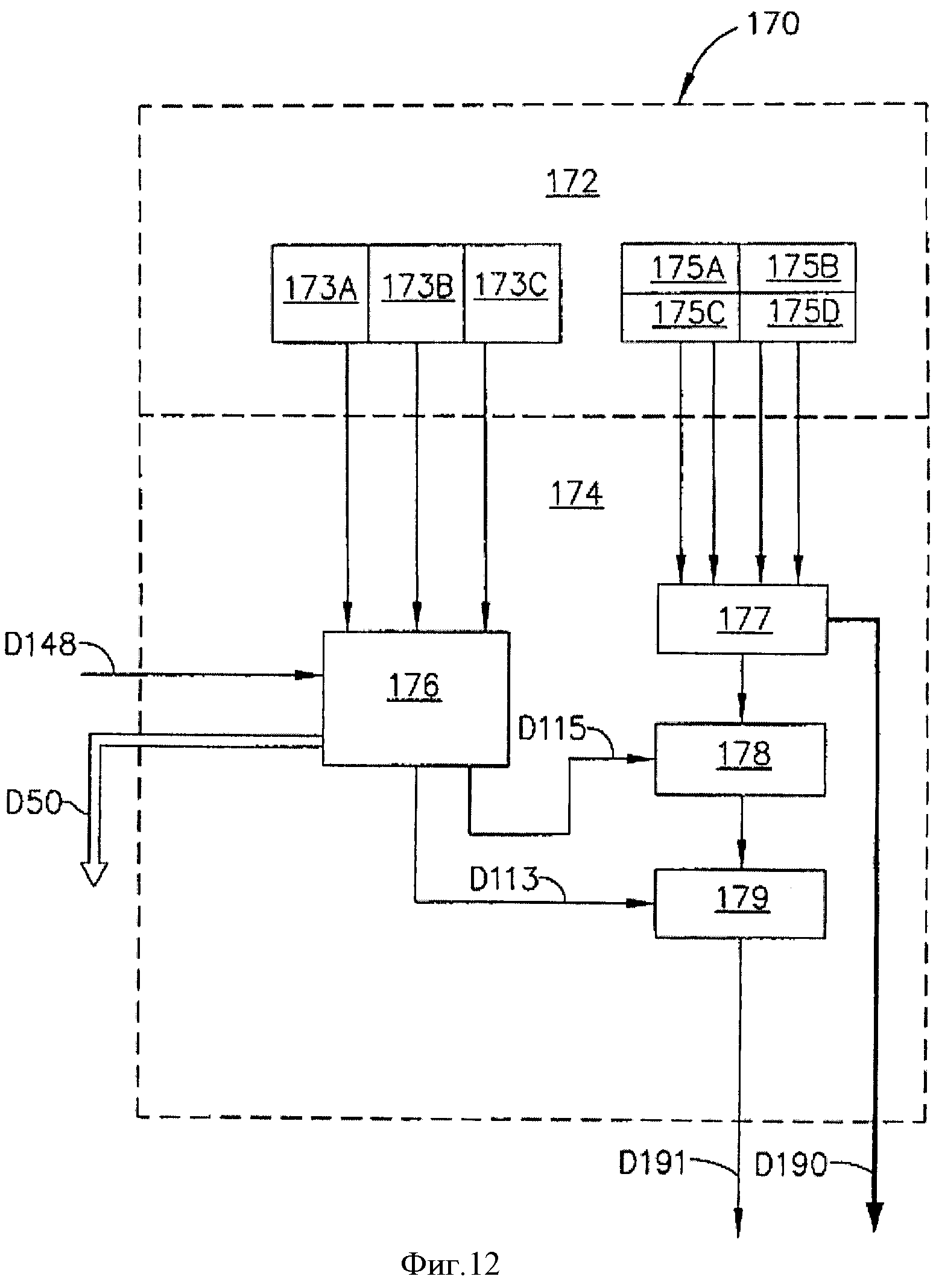
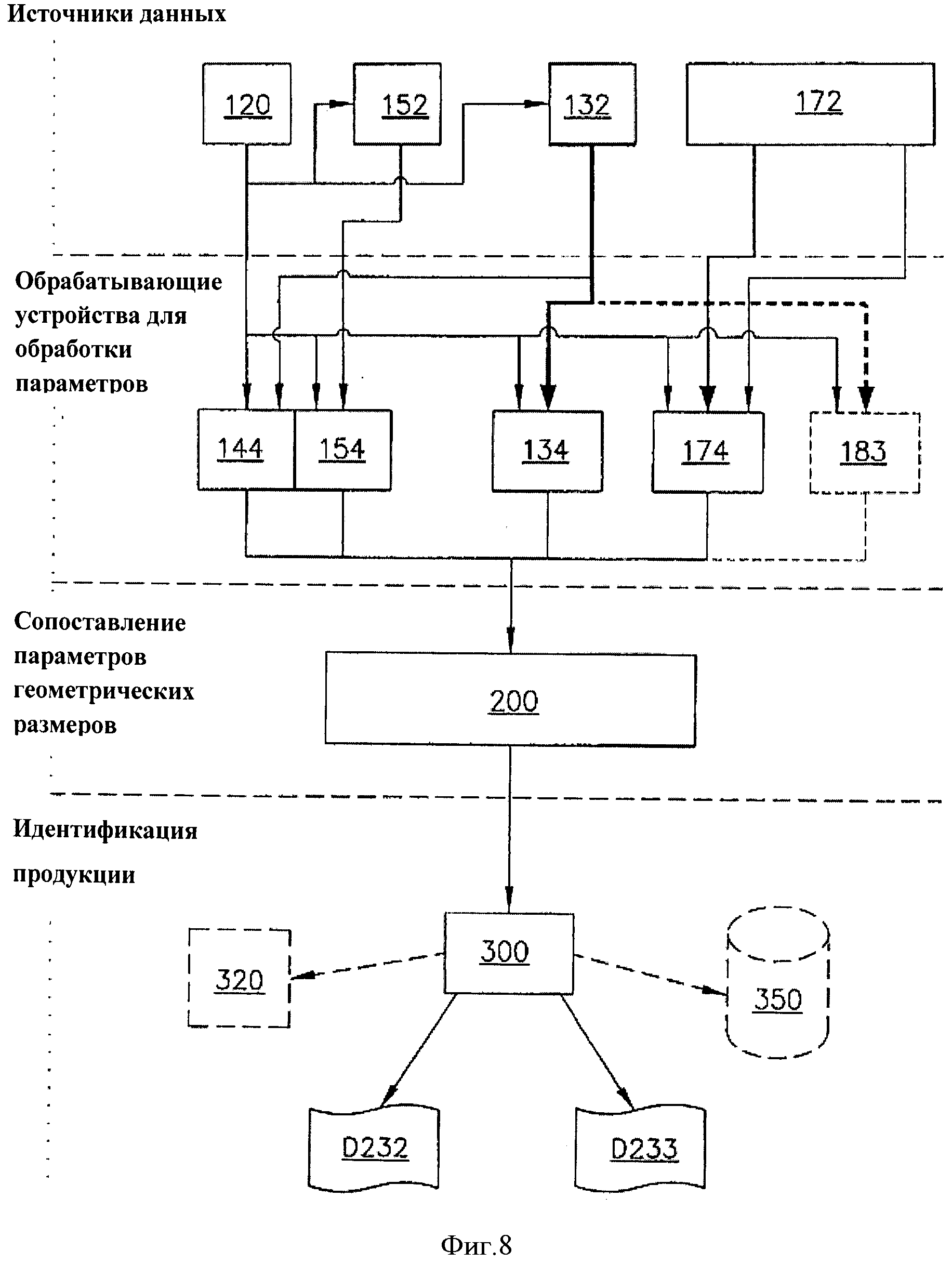
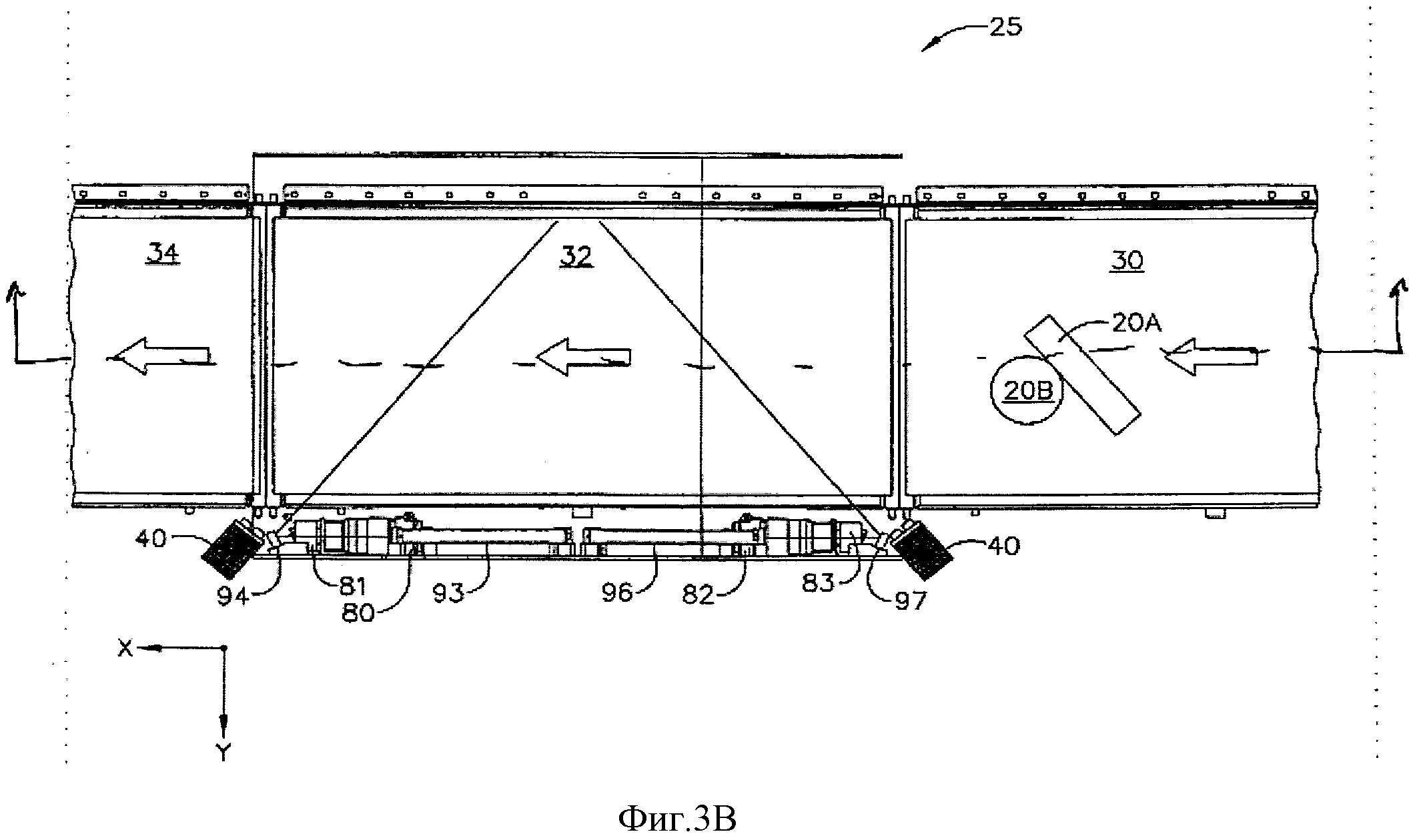
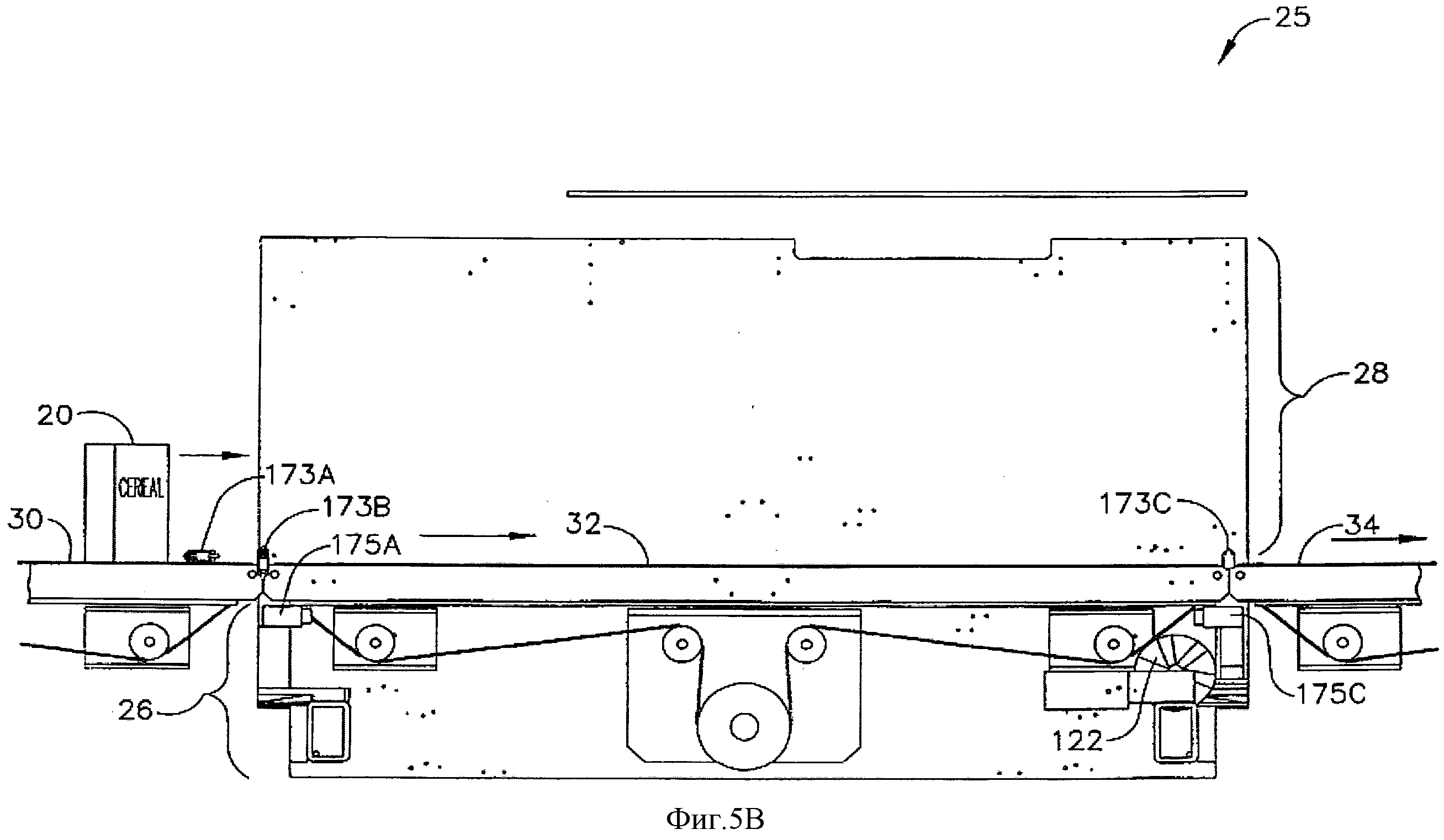
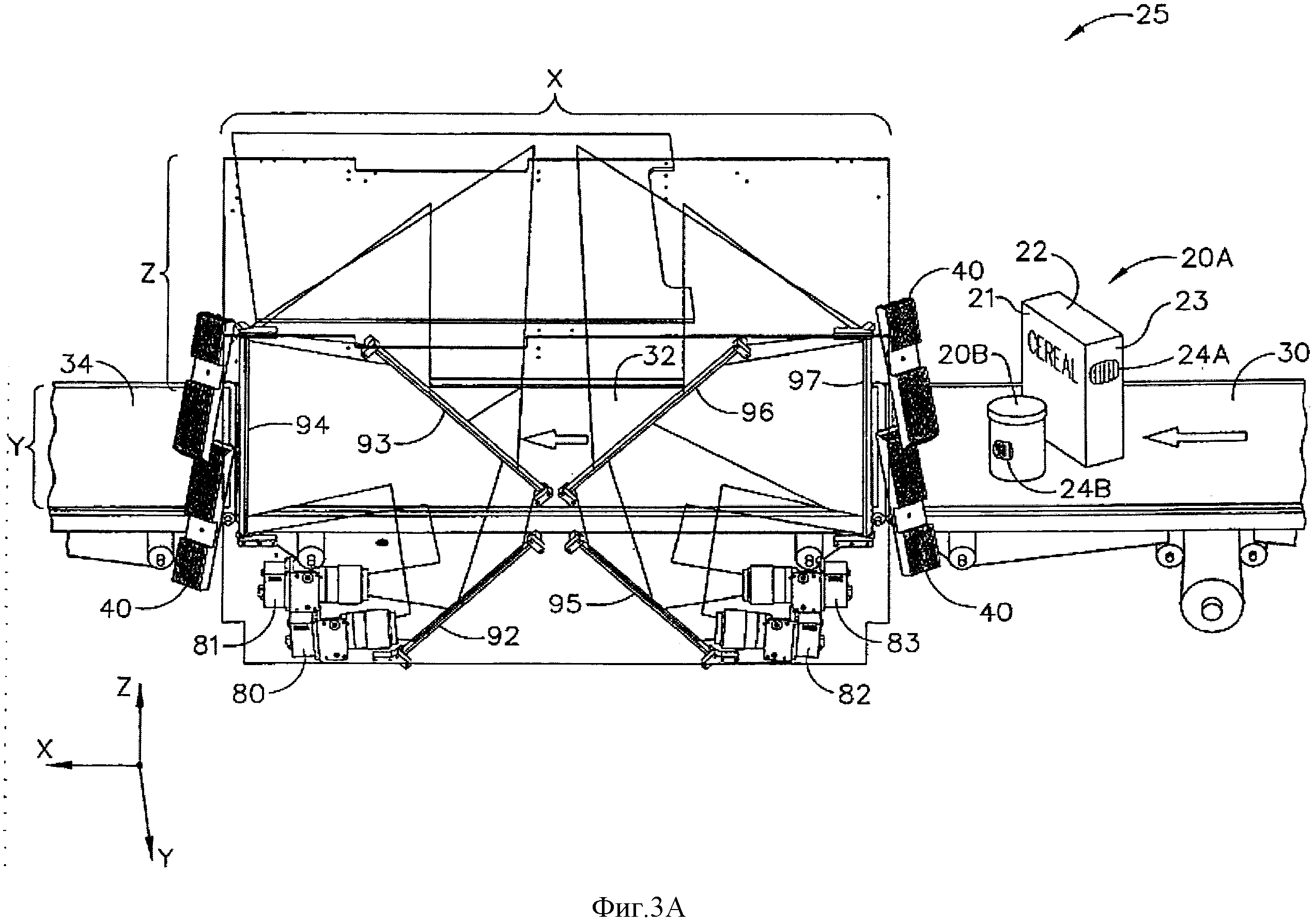
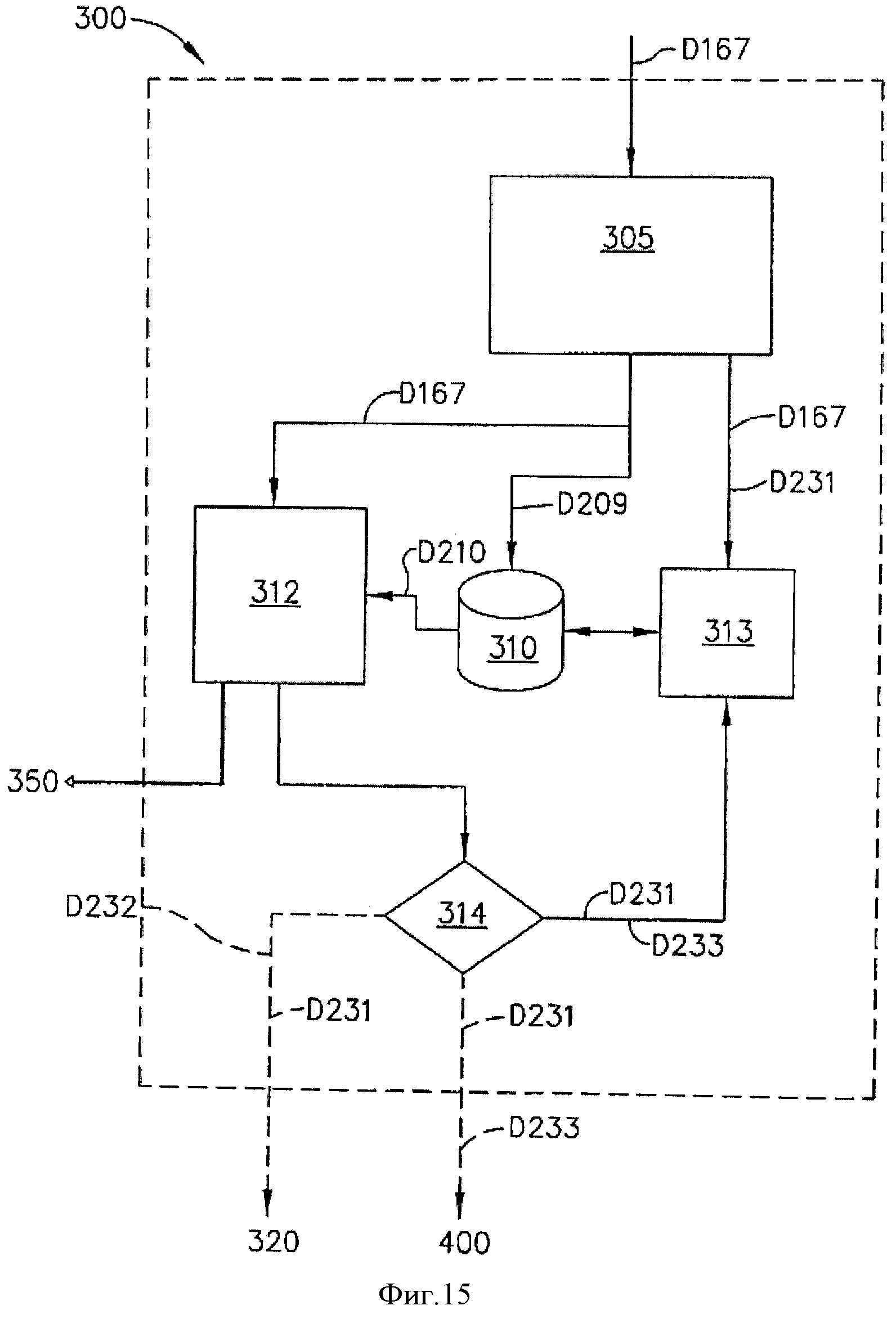
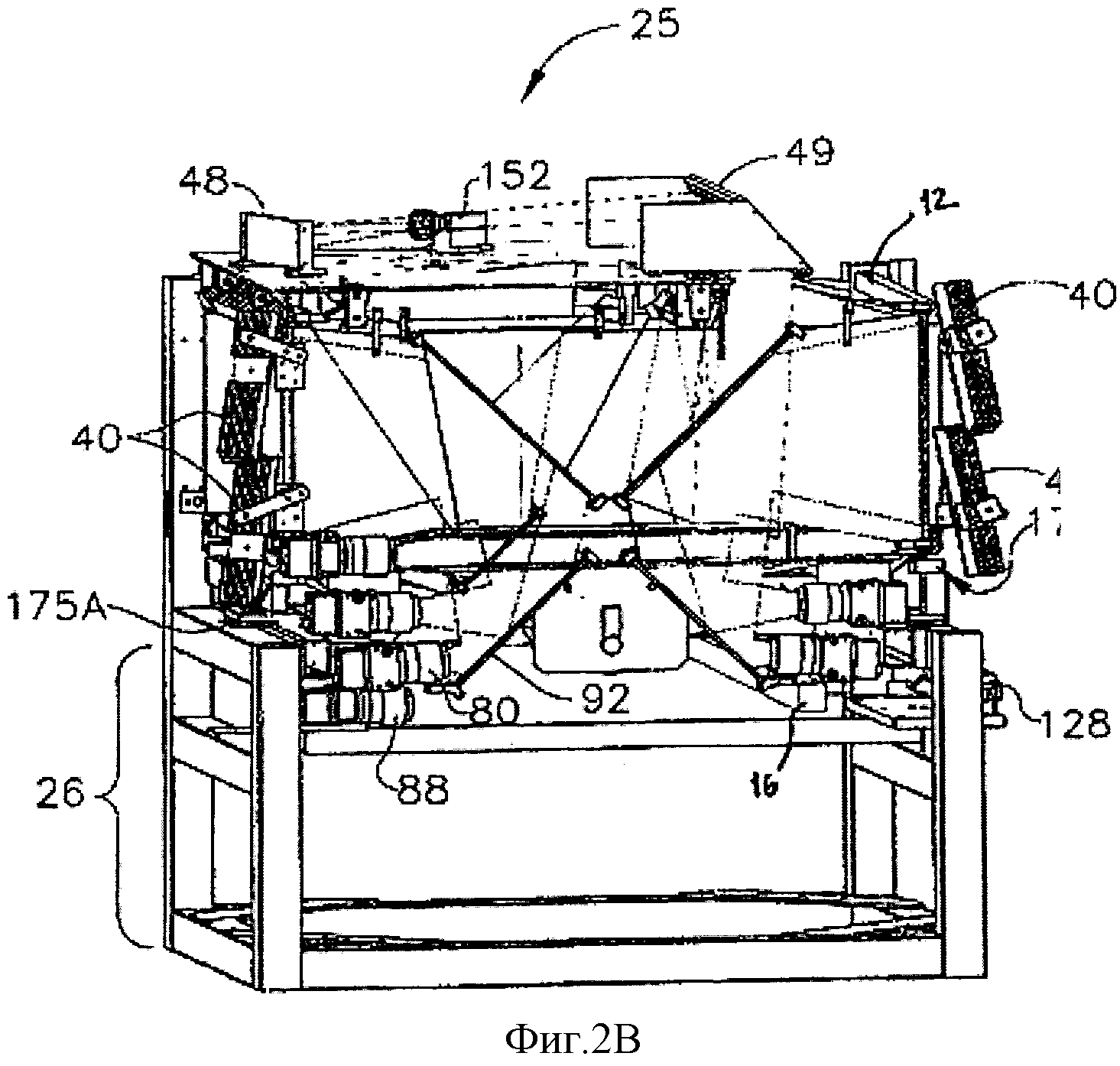
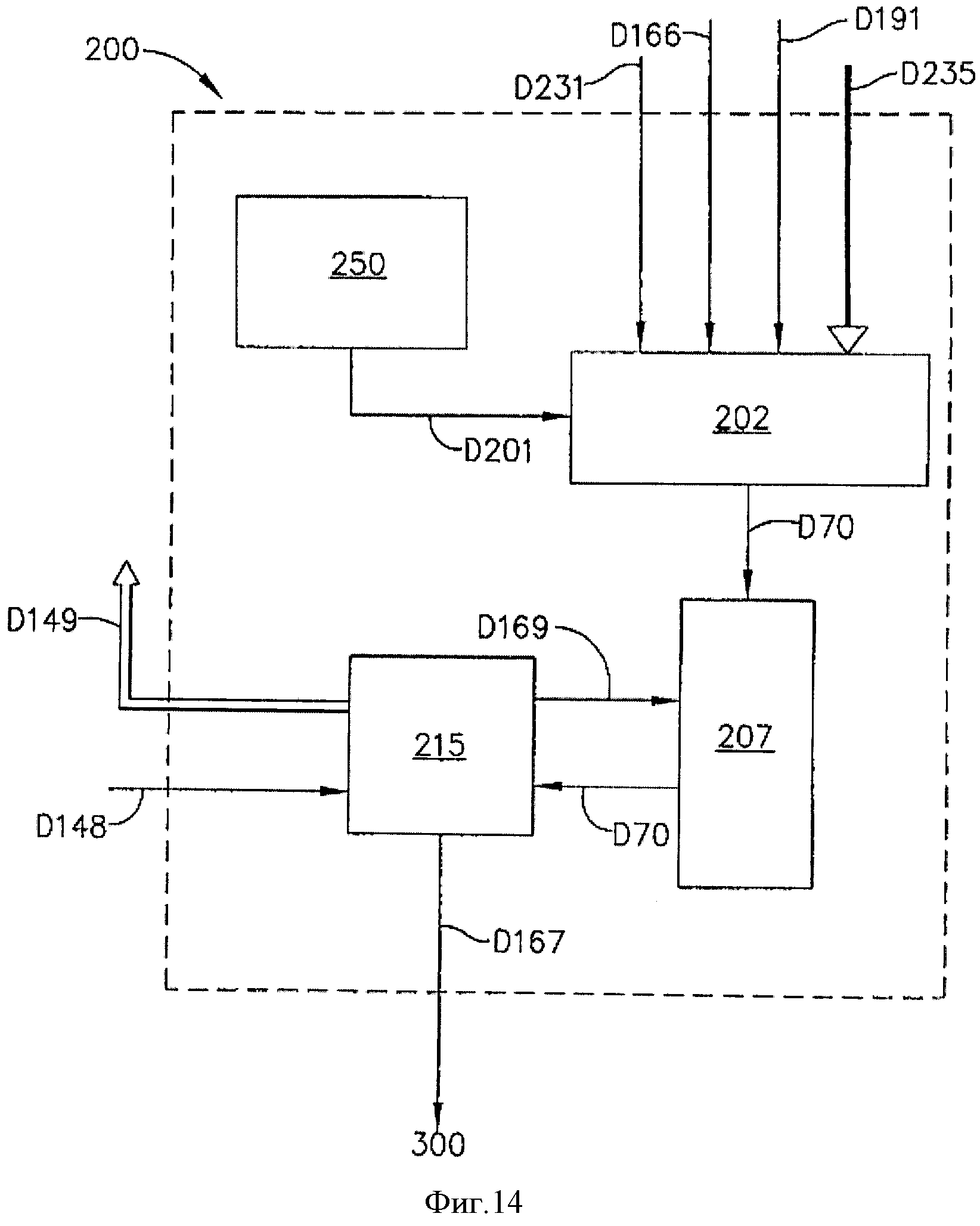
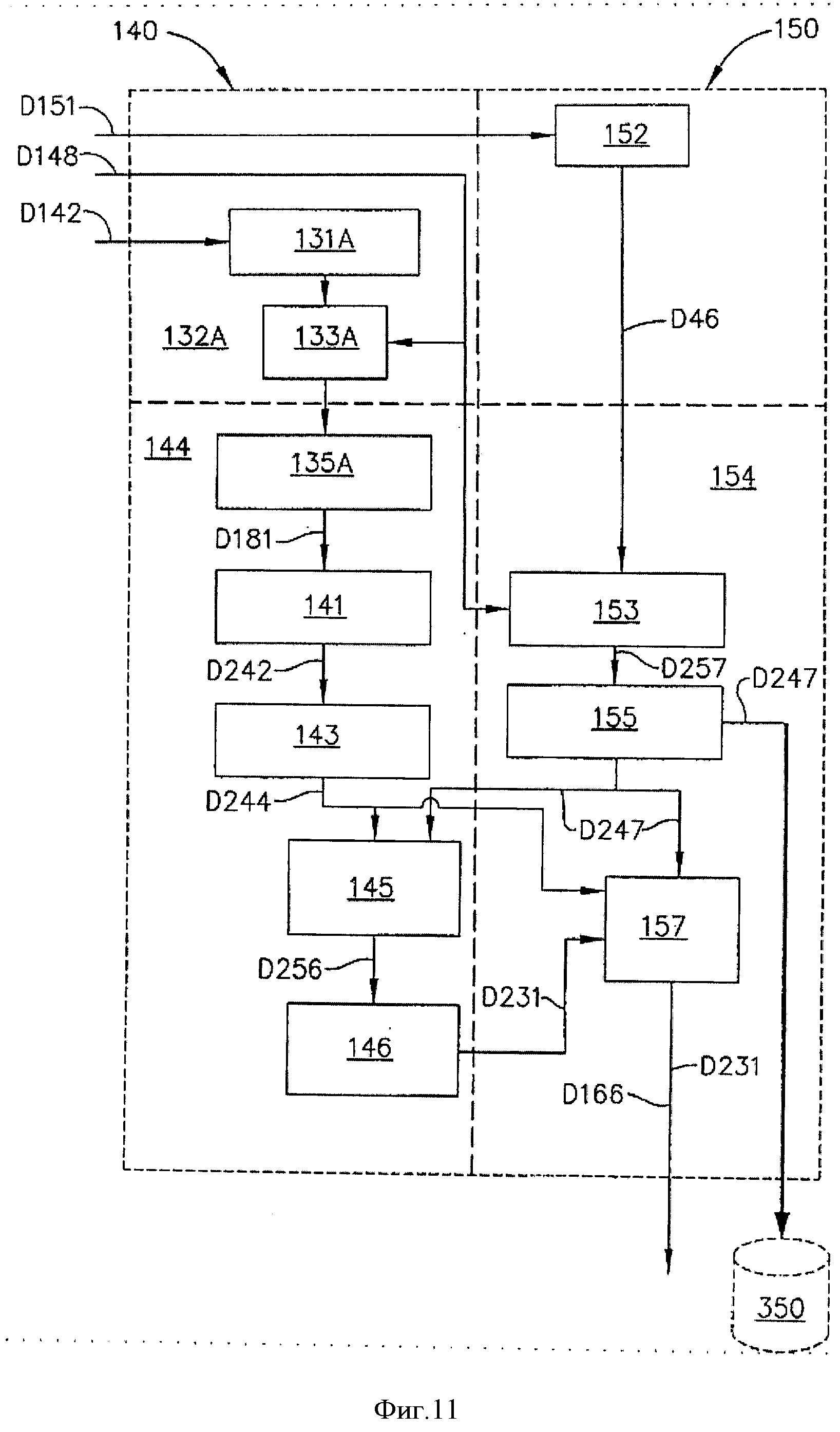
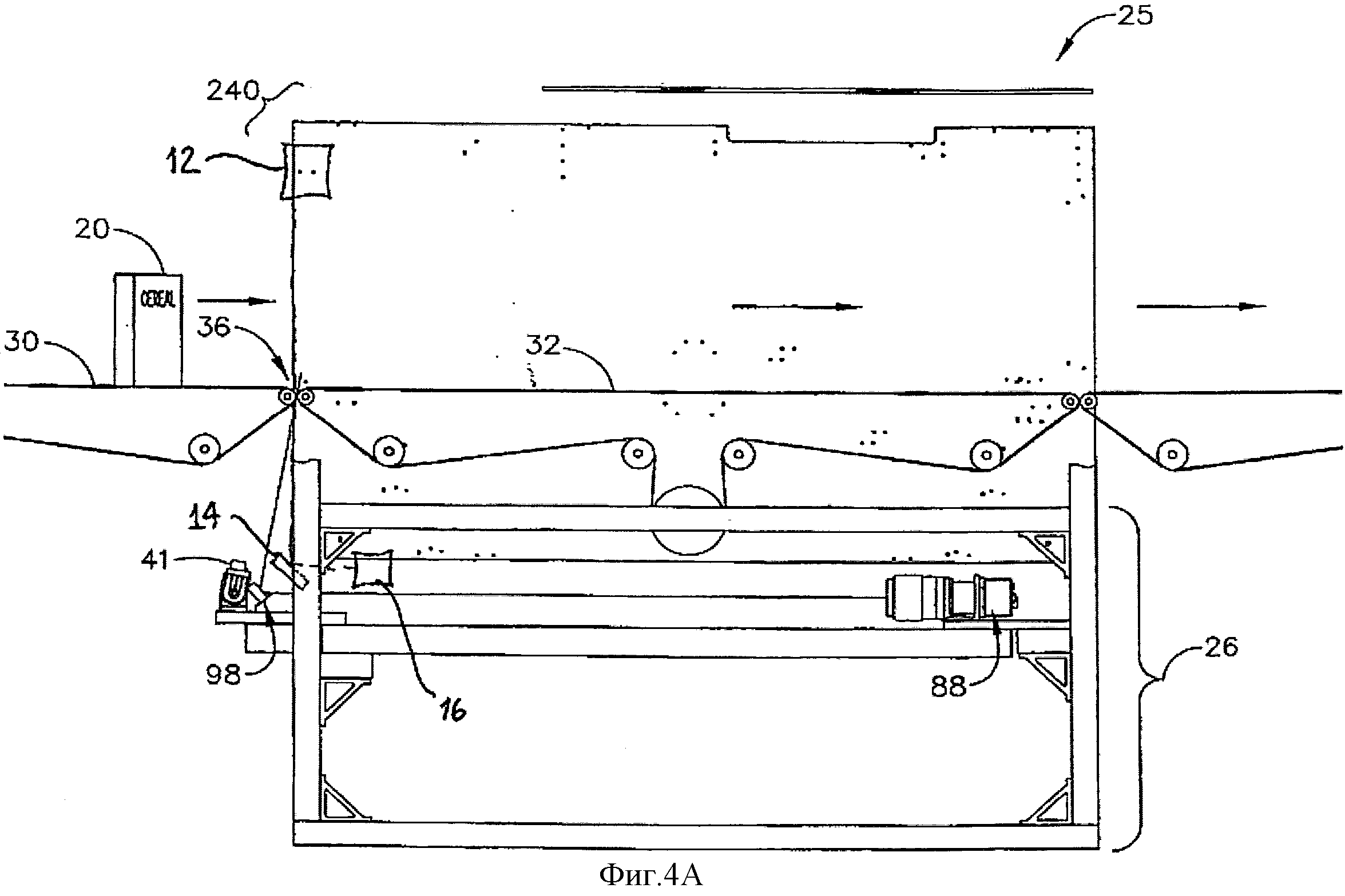
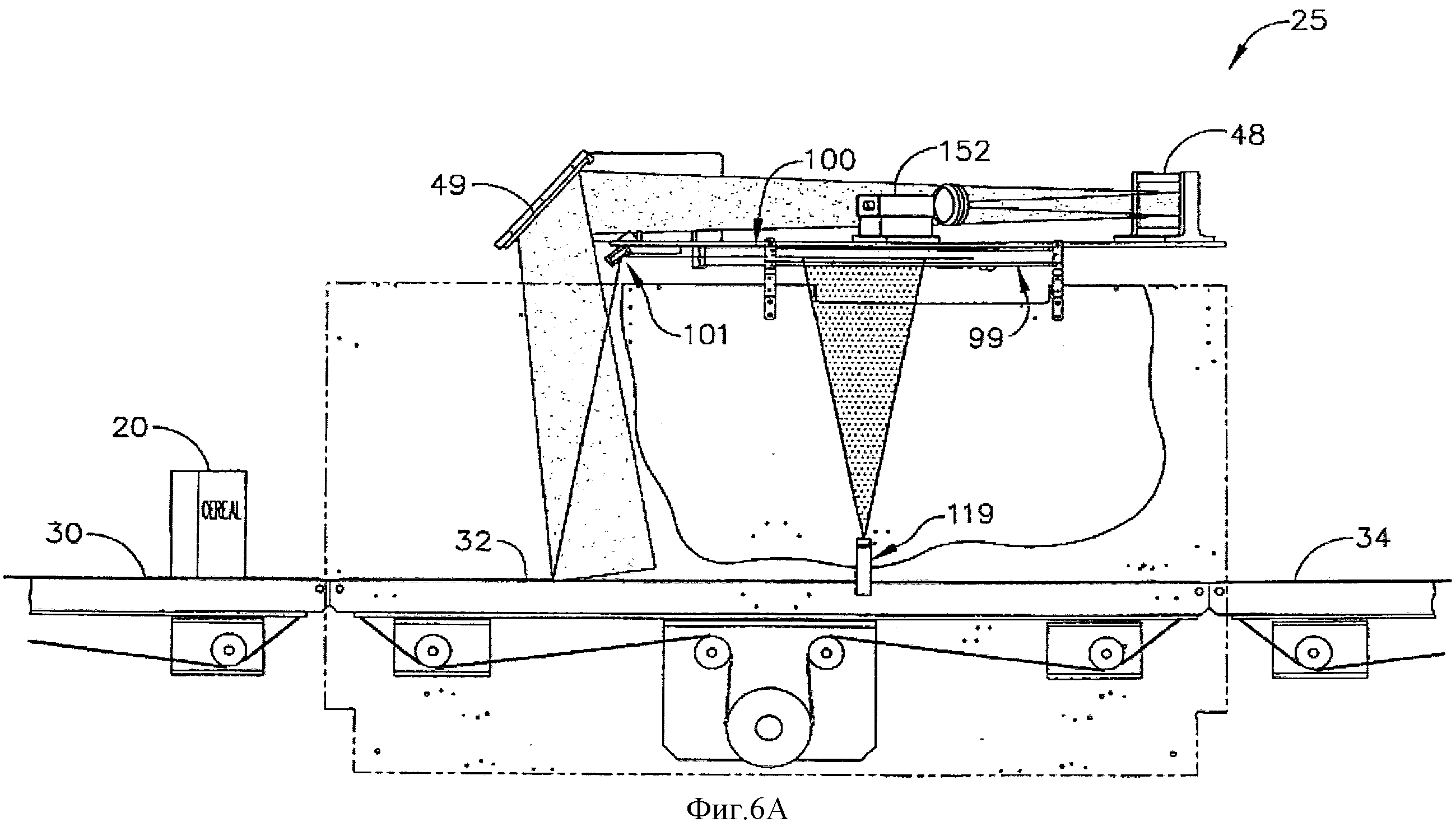
Способ отслеживания в реальном времени положения покупателей в магазине с использованием множественной сети связи
Системы оказания влияния на покупателей в первый момент принятия решения в предприятии розничной торговли
Способы оказания влияния на покупателей в первый момент принятия решения в предприятии розничной торговли
Система получения информации от покупателей и воздействия на принятие покупателями решений о приобретении товаров
Система управления сотрудниками в магазине
Получение фактических данных о поведении покупателей при выборе ими товаров в реальном времени
Системы оказания влияния на выбор товара покупателем в первый момент истины на основании местоположения указанного покупателя в предприятии розничной торговли
Способ отслеживания в реальном времени положения покупателей в магазине с использованием множественной сети связи
Системы оказания влияния на покупателей в первый момент принятия решения в предприятии розничной торговли
Способы оказания влияния на покупателей в первый момент принятия решения в предприятии розничной торговли
Система получения информации от покупателей и воздействия на принятие покупателями решений о приобретении товаров
Система управления сотрудниками в магазине
Получение фактических данных о поведении покупателей при выборе ими товаров в реальном времени
Системы оказания влияния на выбор товара покупателем в первый момент истины на основании местоположения указанного покупателя в предприятии розничной торговли

