Результат интеллектуальной деятельности: АВТОНОМНАЯ БОЕВАЯ ЧАСТЬ С КООРДИНАТОРОМ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области военной техники, в частности к боевым частям кассетных боеприпасов реактивных систем залпового огня.
Известен самоприцеливающийся боевой элемент (СПБЭ), содержащий корпус с боевым элементом, вращающий парашют с полюсным отверстием, выдвижные тормозные щитки, установленные перпендикулярно продольной оси корпуса.
Указанный СПБЭ работает следующим образом. При сбросе СПБЭ в заданной точке траектории полета реактивного снаряда вращающийся парашют вводится в набегающий воздушный поток. СПБЭ переходит в устойчивый полет благодаря стабилизирующему моменту вращающегося парашюта. Далее происходит выдвижение тормозных щитков в рабочее положение. За счет совместного действия щитков и парашюта происходит уменьшение скорости движения элемента до заданной величины. Одновременно с этим происходит вращение боевого элемента, датчик которого совершает обзор местности в поиске цели. При детектировании цели происходит срабатывание боевого элемента (Патент РФ №2451262, опубл. 20.05.2012, МПК F42B 15/00, F42B 10/50).
Основным недостатком указанного СПБЭ является невозможность проведения развернутого автономного поиска цели. Возможное значительное отклонение от заданной точки сброса при доставке боевых элементов неуправляемыми реактивными снарядами существенно снижает вероятность обнаружения цели. Также недостатками описанного выше СПБЭ являются низкая адаптивность процесса выбора цели, в том числе отсутствие возможности расширения зоны поиска цели, существенное снижение эффективности боевого применения за счет недостаточной точности нанесения ударного воздействия в заданную точку наиболее уязвимой зоны цели.
Задачей предлагаемого изобретения является повышение эффективности за счет увеличения вероятности обнаружения цели и повышения точности прицеливания при обеспечении минимальных габаритно-весовых характеристик боевого элемента.
Технический результат достигается тем, что в состав автономной боевой части с координатором цели (далее - автономная боевая часть) введены механизм наведения, устройство, обеспечивающее управляемое, причем в автономном режиме, ее перемещение в вертикальной и горизонтальной плоскостях, в том числе режим зависания, позволяющие осуществлять автономный поиск цели в расширенной зоне, повысить точность ударного воздействия.
Решение указанной задачи достигается тем, что предложенная автономная боевая часть с координатором цели, содержащая корпус, кумулятивный заряд, парашют, источник питания, координатор цели, согласно изобретению, дополнительно включает устройство перемещения, обеспечивающее ее управляемое перемещение в горизонтальной и вертикальной плоскостях, режим зависания в воздухе, систему автономного наведения, включающую соединенные между собой контроллер управления перемещением, навигационную систему, приемник навигационной системы, при этом координатор цели содержит модуль хранения параметров цели, включающий оптический инфракрасный датчик цели, магнитометрический датчик цели, соединенные с блоком хранения параметров цели, причем координатор цели размещен в механизме наведения таким образом, что обеспечивается синхронное изменение положения координатора цели и кумулятивного заряда, при этом кумулятивный заряд установлен таким образом, что его продольная ось располагается вертикально при горизонтальном полете боеприпаса.
В варианте исполнения, автономная боевая часть содержит механизм наведения, обеспечивающий возможность качания боевого элемента во взаимно перпендикулярных вертикальных плоскостях.
В варианте исполнения, автономная боевая часть содержит механизм наведения, обеспечивающий возможность качания боевого элемента в вертикальной плоскости и поворота в горизонтальной плоскости.
В варианте исполнения, устройство перемещения автономной боевой части включает два, предпочтительно более двух электроприводов, при этом на валы электроприводов установлены воздушные винты, причем на валу привода установлена втулка, с которой шарнирно соединены лопасти воздушного винта, таким образом, что обеспечивается установка лопастей винта в рабочее положение под действием центробежных сил при вращении вала привода.
В варианте исполнения, электроприводы с установленными винтами размещены на консолях предпочтительно равномерно вокруг продольной оси боеприпаса.
В варианте исполнения, консоли выполнены трансформируемыми, при этом один конец консоли закреплен на корпусе автономной боевой части, а на другом конце консоли размещен электропривод, при этом узел крепления консоли к корпусу автономной боевой части выполнен таким образом, что обеспечивается трансформация положения консоли из исходного, при котором консоль предпочтительно расположена вдоль продольной оси боеприпаса, в рабочее/боевое положение, при котором плоскость вращения воздушного винта расположена предпочтительно под углом <90°, в вертикальной плоскости, к продольной оси боеприпаса.
В варианте исполнения, автономная боевая часть содержит стопорные элементы, обеспечивающие фиксацию лопастей винта в исходном положении консоли, при этом лопасти в фиксированном положении расположены предпочтительно вдоль консоли, причем указанные стопорные элементы выполнены таким образом, что при трансформации консоли в рабочее положение обеспечивается освобождение лопастей от фиксации.
В варианте исполнения, стопорные элементы, обеспечивающие фиксацию лопастей воздушного винта, размещены на консолях.
В варианте исполнения боеприпаса тормозное устройство содержит парашют, соединенный с корпусом боеприпаса, и вытяжной фал, соединенный с парашютом.
В варианте исполнения, автономная боевая часть содержит механизм расстыковки парашюта с корпусом боеприпаса при уменьшении до определенной величины скорости снижения боеприпаса.
В варианте исполнения, автономная боевая часть содержит пиропатрон расстыковки парашюта с корпусом боеприпаса.
В варианте исполнения, парашютный блок в транспортном положении размещен со стороны кумулятивной воронки заряда, при этом фал парашюта с головной частью - автономная боевая часть.
В варианте исполнения, автономная боевая часть содержит защитный кожух, состоящий как минимум из двух частей - донной и головной, причем парашютный блок размещен в донной части защитного корпуса, при этом в головной части защитного кожуха выполнены отверстия, обеспечивающие в полете, после отделения автономной боевой части от реактивного снаряда, поступление во внутренний объем защитного корпуса скоростного воздушного потока, под действием которого обеспечивается выход вытяжного фала, при этом элементы крепления донной и головной частей защитного корпуса между собой, а также к корпусу автономной боевой части выполнены таким образом, что обеспечивается расстыковка донной и головной частей защитного корпуса, отделение донной и головной частей от автономной боевой части после выхода вытяжного фала, выхода и раскрытия парашюта.
В варианте исполнения, источник питания, составные части системы наведения, устройства перемещения размещены в корпусе автономной боевой части таким образом, что в транспортном/исходном положении центр масс автономной боевой части смещен вдоль ее продольной оси, в сторону головной части защитного кожуха, на величину, обеспечивающую устойчивое движение автономной боевой части после ее отделения от реактивного снаряда.
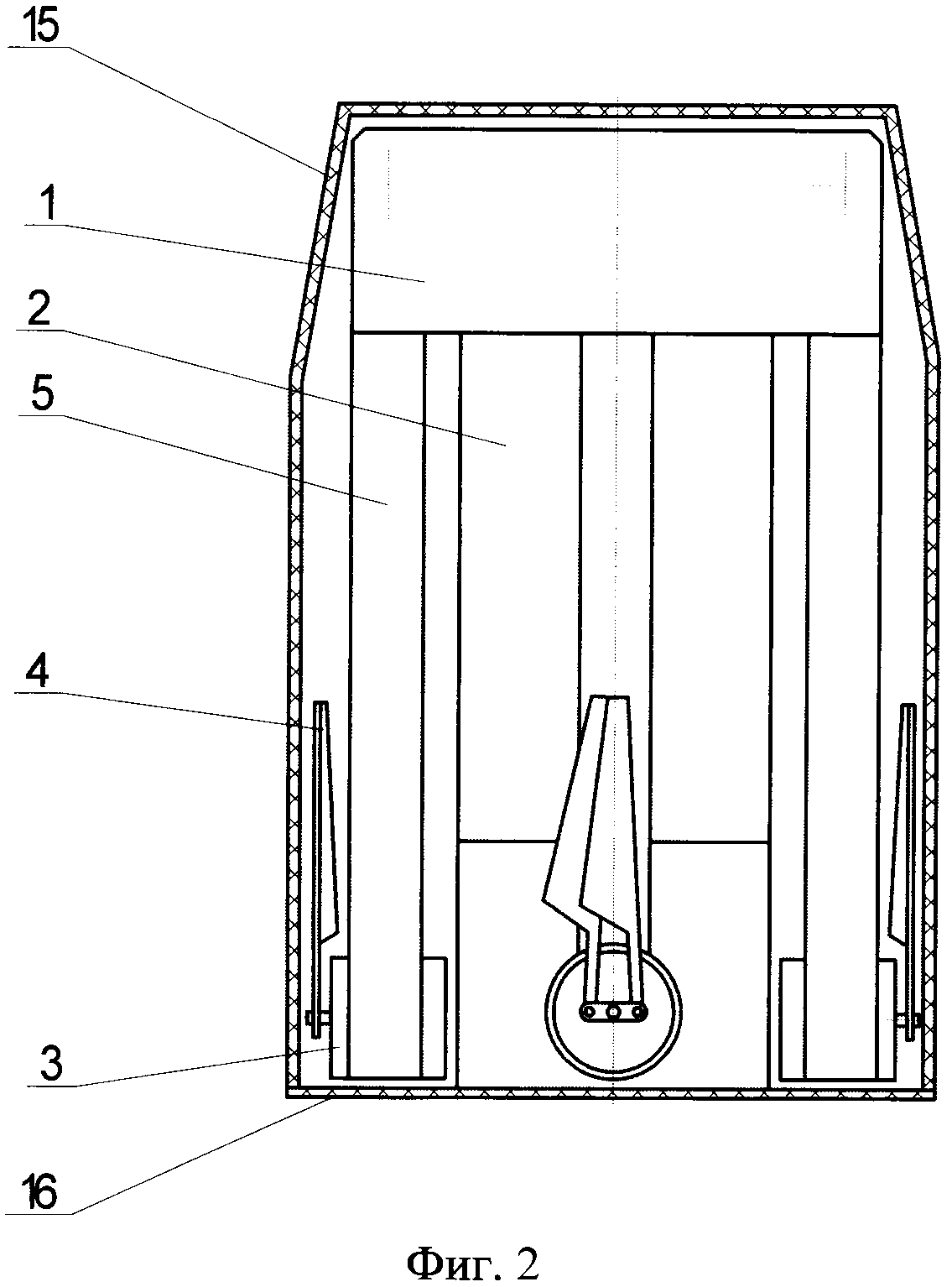
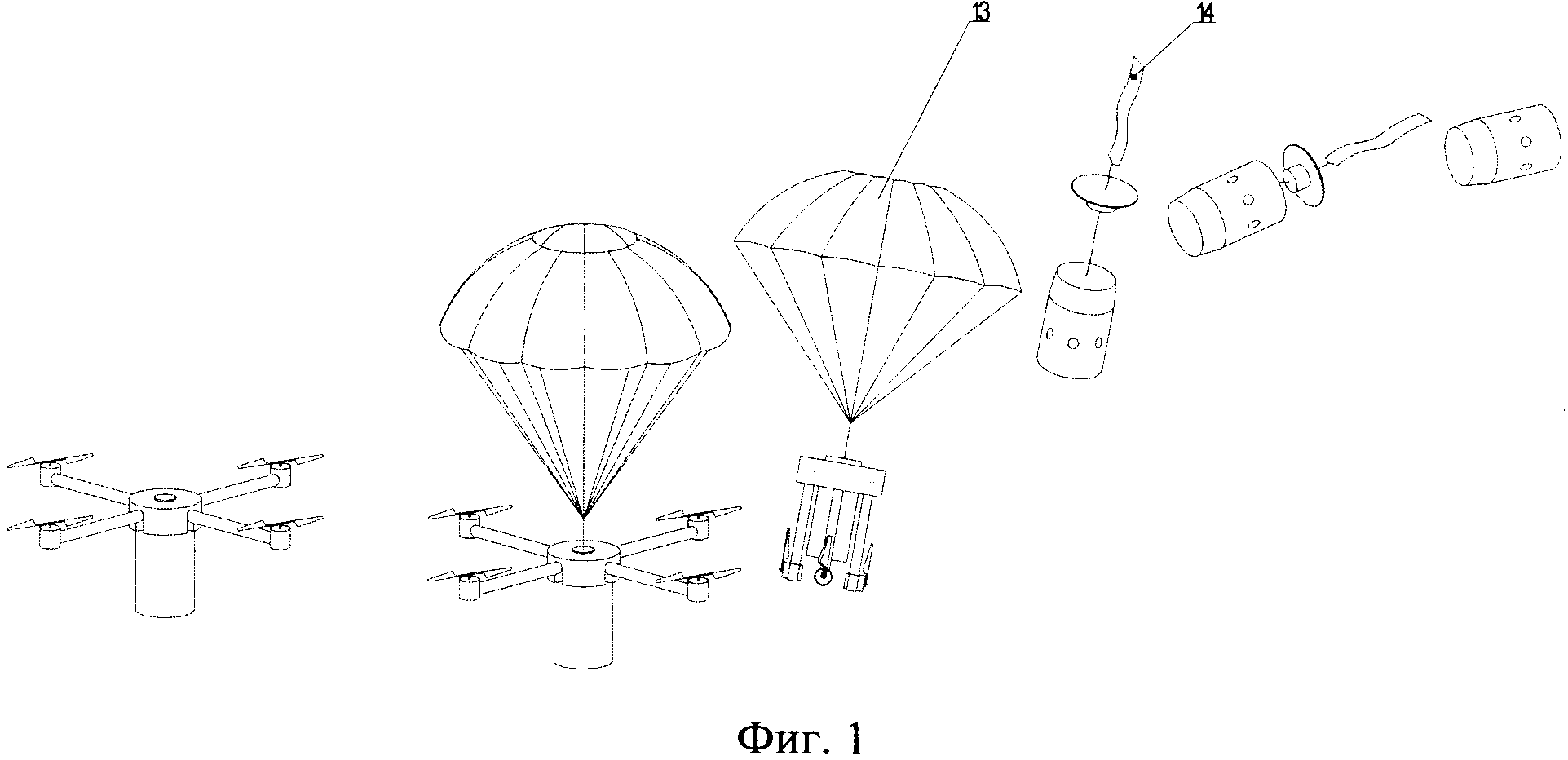
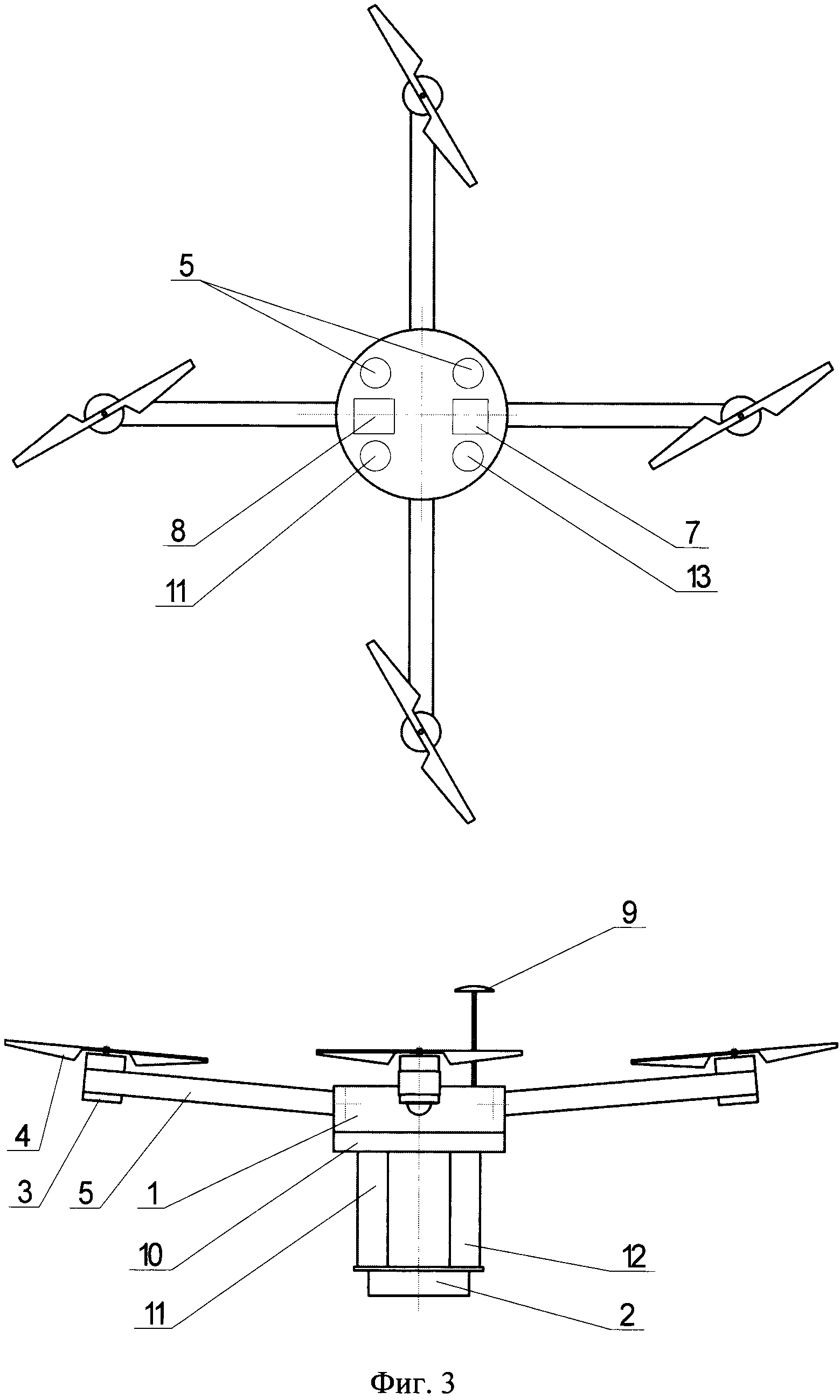
Сущность изобретения иллюстрируется чертежами, где на фиг.1 показаны стадии развертывания автономной боевой части после ее отделения от носителя; на фиг.2 показана конструктивная схема автономной боевой части, на фиг.3 показана автономная боевая часть в развернутом/боевом положении.
Автономная боевая часть содержит корпус 1, кумулятивный заряд 2, устройство перемещения, включающее предпочтительно более двух винтомоторных групп, состоящих из электропривода 3 с воздушным винтом 4, размещенных на консолях 5, источник питания 6, автономную систему наведения, включающую соединенные между собой контроллер управления перемещением 7, навигационную систему 8, приемник навигационной системы 9, координатор цели 10, включающий модуль хранения параметров цели (не показан), оптический инфракрасный датчик цели 11, магнитометрический датчик цели (не показан), радиолокационный высотомер (не показан), устройство распознавания цели 12, тормозной парашют 13 с вытяжным фалом 14, защитный кожух, состоящий из головной части 15 и донной части 16.
Функционирование автономной боевой части осуществляется следующим образом.
Перед применением в модуль хранения параметров цели вводятся физические параметры цели. Установка параметров цели осуществляется контактным способом или дистанционно по радиоканалу через приемник навигационной системы 9. После доставки и сброса автономной боевой части реактивным снарядом в заданной точке траектории в набегающий воздушный поток вводится парашют 13 или в варианте исполнения вытяжной фал 14, затем парашют 13, происходит отделение головной 15 и донной 16 частей защитного кожуха, положение автономной боевой части в пространстве стабилизируется, снижается скорость его движения. После достижения определенной величины скорости снижения осуществляется раскрытие консолей 5 и запуск электродвигателей 3. Далее отстреливается тормозной парашют 13 с вытяжным фалом 14, автономная боевая часть переводится в режим автономного поиска цели. Навигационная система 8, в соответствии с установленным алгоритмом поиска, на основании сигналов координатора цели 10 выдает управляющие команды для контроллера управления перемещением 7. В процессе перемещения автономной боевой части координатор цели 10 осуществляет сканирование местности при помощи оптического инфракрасного датчика цели 11, магнитометрического датчика цели, устройства распознавания цели 12. В случае соответствия обнаруженного объекта поиска заданной совокупности физических параметров, установленных в модуле хранения параметров цели, цель идентифицируется, осуществляется наведение кумулятивного заряда при помощи маневрирования автономной боевой части на заданную точку цели, на основании анализа физических характеристик цели и регистрируемого образа цели формируется сигнал на подрыв кумулятивного заряда. В варианте исполнения автономной боевой части с механизмом наведения прицеливание осуществляется независимо от ее маневрирования, что позволяет повысить точность прицеливания, увеличить угловой диапазон прицеливания по вертикали - более 90° от вектора, направленного по нормали к поверхности.
Предложенное техническое решение позволяет существенно уменьшить влияние отклонения от заданной точки сброса при доставке автономной боевой части неуправляемыми реактивными снарядами, повысить вероятность обнаружения цели за счет расширения зоны действия автономной боевой части и адаптивности процесса поиска цели, повысить эффективность боевого применения за счет точности прицеливания кумулятивного заряда. При этом предложенное техническое решение за счет возможности трансформации положения частей конструкции тактического боеприпаса из «транспортного» в «боевое» позволяет минимизировать габаритные размеры автономной боевой части в исходном/транспортном положении и в результате увеличить количество автономных боевых частей, размещаемых в конструктивном объеме кассетного реактивного снаряда.
Способ обеспечения заданного дробления осколочного блока осколочно-пучкового снаряда
Электрическая лампа накаливания
Мехатронно-модульный робот
Мехатронно-модульный робот и способ многоальтернативной оптимизации моделей автоматизации структурного синтеза для его создания
Установка для очистки воздуха
Способ повышения эффективности очистки воздуха в разнотемпературной конденсационной камере
Способ очистки воздуха
Способ электрохимической обработки каналов соосно-струйной форсунки для камеры жидкостного ракетного двигателя
Установка для обработки нанокомпозитов в водородной плазме
Способ определения типа матрицы композитов металл-диэлектрик
Электрическая лампа накаливания
Мехатронно-модульный робот
Мехатронно-модульный робот и способ многоальтернативной оптимизации моделей автоматизации структурного синтеза для его создания
Установка для очистки воздуха
Способ повышения эффективности очистки воздуха в разнотемпературной конденсационной камере
Способ очистки воздуха
Способ электрохимической обработки каналов соосно-струйной форсунки для камеры жидкостного ракетного двигателя
Установка для обработки нанокомпозитов в водородной плазме
Способ определения типа матрицы композитов металл-диэлектрик
Тракт охлаждения теплонапряженных конструкций

