Результат интеллектуальной деятельности: КООРДИНАЦИЯ НА ОСНОВЕ ЭКОНОМИКИ УСОВЕРШЕНСТВОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ И ОПТИМИЗАЦИЯ В РЕАЛЬНОМ ВРЕМЕНИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к управлению производственным процессом с использованием экономической целевой функции.
Уровень техники
Одна из задач производственного процесса заключается в преобразовании сырья в необходимую продукцию при наличии постоянно меняющихся внешних воздействий, таких как температура воздуха, температура воды и т.д., и требований, таких как спецификация на продукцию, операционные ограничения и нормы по охране окружающей среды и безопасности. Главным стимулом к использованию усовершенствованного управления технологическим процессом (APC) и оптимизации в реальном времени (RTO) является управление работой системы в областях, которые обеспечивают максимальную прибыль при наличии ограничений.
В нынешней практике этот стимул осуществляется с использованием удаленного заданного значения/цели, передающей общую схему между модулем RTO и модулем APC. Это удаленное заданное значение, передающее стратегию между модулем RTO и модулем APC, представляет собой, по существу, перевод основной экономической задачи в задачу управления процессом. Например, в известной схеме автоматизации процесса, модуль RTO пытается управлять модулем APC с наиболее экономной рабочей точкой путем передачи цели для набора переменных управления процессом (например, все переменные управления процессом или поднабор переменных управления процессом). В частности, модуль RTO обычно содержит точную, нелинейную, находящуюся в устойчивом состоянии модель экономики и ограничивает процесс, которым необходимо управлять. Когда процесс находится в устойчивом состоянии (то есть в состоянии, в котором набор определенных переменных находится в пределах установленного допуска изменчивости), модель RTO использует эту модель для вычисления экономически оптимальной рабочей точки, которая поддерживает связь с модулем APC в виде целей для специфических переменных управления процессом. Модуль APC, выполняющий работу на гораздо более высокой частоте, чем модуль RTO, пытается динамическим способом управлять переменными процессами в направлении своих соответствующих целей, соблюдая при этом все ограничения. Модуль APC продолжает управлять переменными процесса направления своих соответствующих целей до тех пор, пока новые цели не будут приняты из системы RTO.
В известном подходе для координации операций между модулем RTO и модулем APC, как описано выше, цели, переданные модулем RTO в модуль APC, представляют собой ограниченный экономический оптимум во время, когда модуль RTO нес ответственность за процесс, ограничение и экономические данные. Этот ограниченный экономический оптимум представляет собой оптимум, соответствующий ограничениям, которые накладываются на различные улучшенные переменные управления процессом в процессе с помощью операторов, инженеров или других. Однако модуль APC не имеет знания о неограниченном экономическом оптимуме, который представляет собой оптимум без учета ограничений.
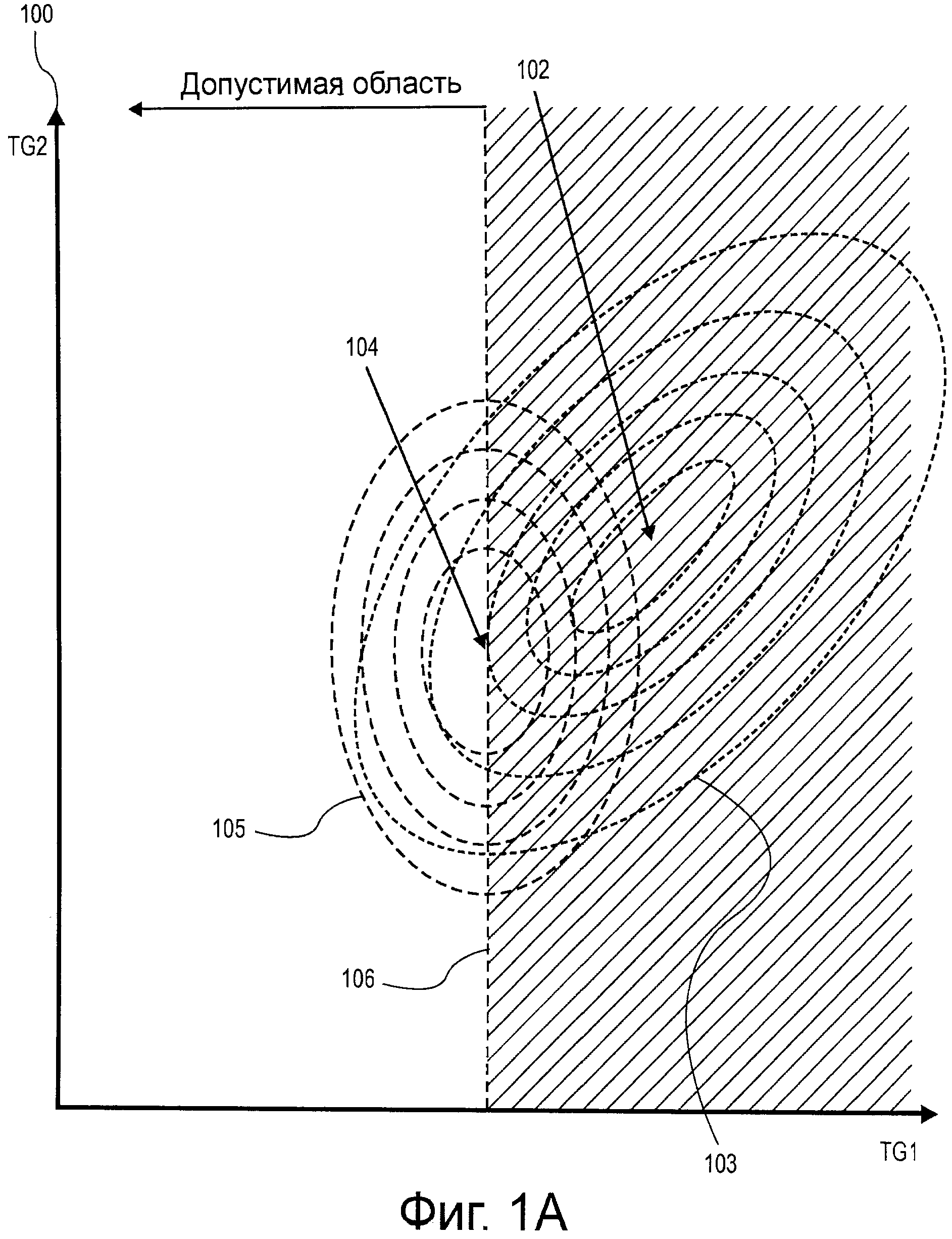
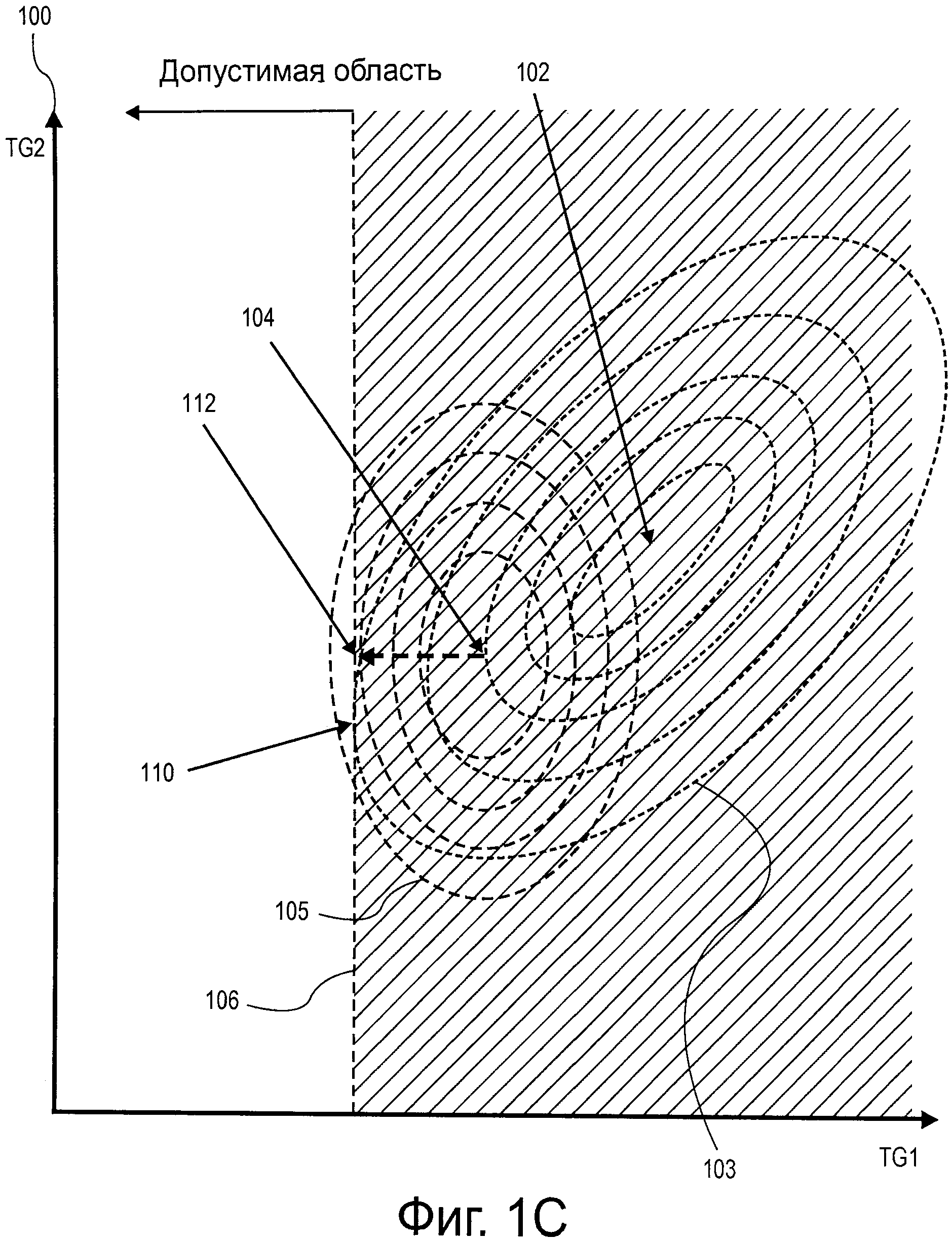
Фигура 1a изображает участки неограниченного экономического оптимума 102 и ограниченного экономического оптимума 104 на графике 100 переменных TG1 и TG2 управления процессом, который относится к производственному процессу. Каждая окружность контура 103 представляет собой постоянное значение экономической целевой функции, которая используется модулем RTO. Контур 105 представляет собой целевую функцию APC, которая минимизирует расстояние от ограниченного экономического оптимума 104, где расстояние измеряется как взвешенная сумма квадратов разностей между значениями переменных и их целями. Например, TG1 может относиться к скорости потока процессов в производственном процессе, который можно было бы использовать на нефтехимическом заводе, и TG может относиться к температуре потока. Производственным процессом, который изображен на графике 100, управляют с помощью системы управления процессом и оптимизации предшествующего уровня техники, который включает в себя модуль RTO и модуль APC, работающий совместно для управления производственным процессом в направлении экономического оптимума, который соблюдает все ограничения.
Ограничение 106 ограничивает возможные значения для переменной TG1 управления процессом. Придерживаясь ограничения 106, модуль RTO будет определять ограниченный экономический оптимум 104 для производственного процесса, который состоит из специфического значения для каждого TG1 и TG2. Например, в ситуации, описанной выше, в которой TG1 представляет скорость подаваемого потока вещества во впускном отверстии корпуса реакторного сосуда, выполняющего производственный процесс, ограничение 106 может установить оператор производственного процесса на максимум десять кубических метров в секунду. Таким образом, на основании ограничения 106, модуль RTO будет передавать цель для TG1 в модуль APC, который меньше или равен десяти кубических метров в секунду наряду с целью для TG2. Например, модуль RTO может посылать в модуль APC цель TG1 десять кубических метров в секунду и цель TG2 120 градусов по Цельсию. Эти цели представляют собой ограниченный экономический оптимум 104, при котором производственный процесс наиболее рентабельный при соблюдении всех ограничений (то есть ограничения 106). Модуль APC в свою очередь управляет скоростью TG1 подаваемого потока в направлении десяти кубических метров в секунду и температурой TG2 управления 120 градусов по Цельсию. Хотя эти значения для TG1 и TG2, которые обеспечивают наибольшую рентабельность для производственного процесса (например, неограниченный экономический оптимум 102), эти значения для TG1 и TG2 не соблюдают ограничения 106. Таким образом, управление производственным процессом в направлении ограниченного экономического оптимума 104 является идеальным, хотя ограничение 106 остается в том же самом месте на графике 100.
При возникновении возмущения, которое перемещает ограниченный экономический оптимум 104, установка цели для TG1 и TG2 с помощью модуля RTO не является больше оптимальной. Например, может возникать возмущение, которое изменяет ограничение 106 таким образом, что для TG1 предоставляется большая "площадь". Например, оператор может изменить ограничение 106 до двенадцати кубических метров в секунду.
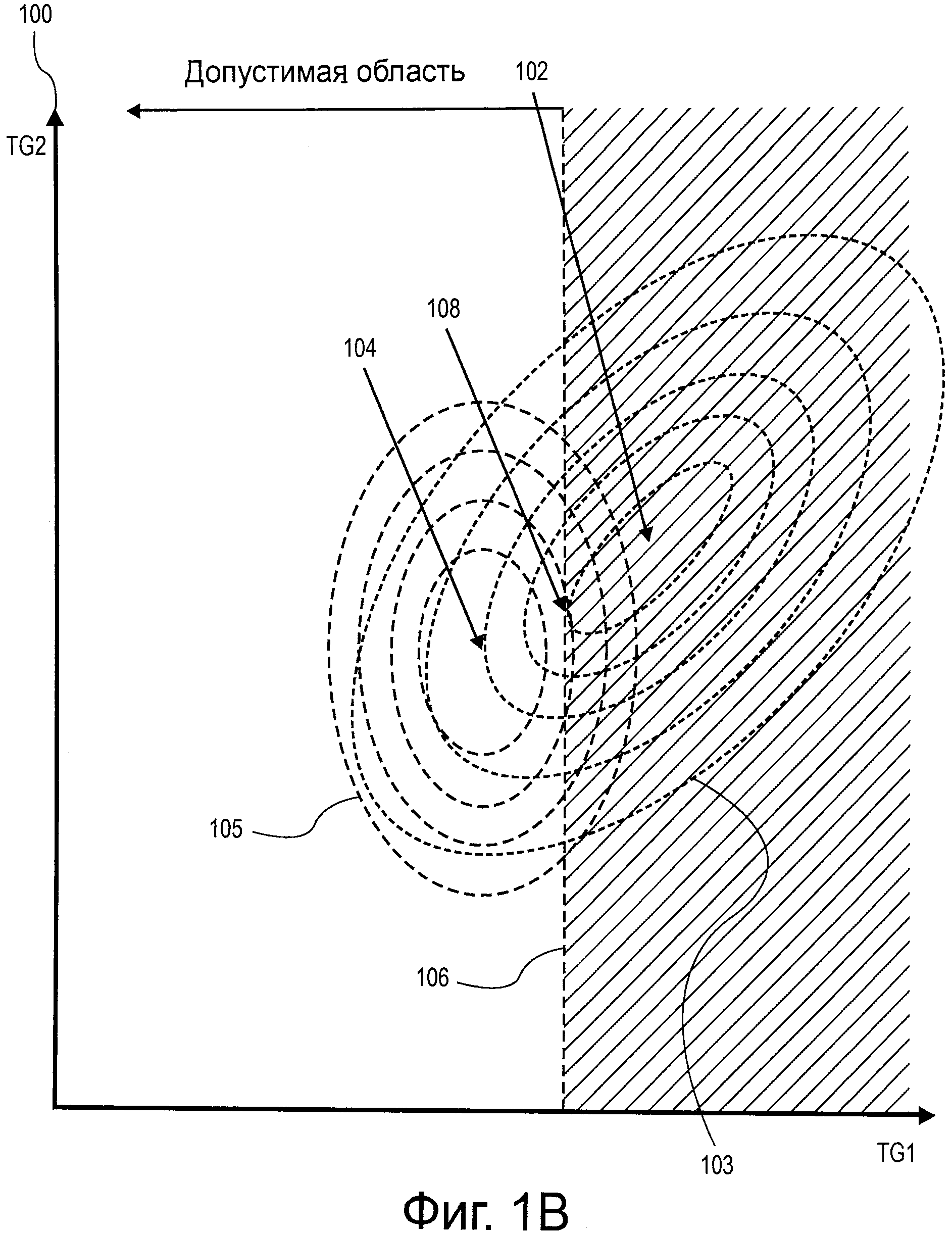
Фигура 1b изображает график 100 после возникновения возмущения, описанного выше. Неограниченный экономический оптимум 102 остается в том же самом местоположении, как и перед тем, когда был создан новый ограниченный экономический оптимум 108 на основании возмущения. Новый ограниченный экономический оптимум 108 находится ближе к невозмущенному экономическому оптимуму 102, чем ограниченный экономический оптимум 104, так как изменение ограничения 106 позволяет новому ограниченному экономическому оптимуму 108 получить преимущества более высокой площади для TG1. При известной системе управления процессом установленного значения, модуль APC не будет знать о новом ограниченном экономическом оптимуме 108 до тех пор, пока RTO не представит новые цели установленных значений, которые соответствовали бы новому ограниченному экономическому оптимуму 108.
Альтернативно, может возникать возмущение, которое изменяет ограничение 106 таким образом, что меньшая "площадь" предоставляется TG1, делая больше невозможным набор целей для TG1 и TG2 с помощью модуля RTO. Например, оператор может изменить ограничения 106 до восьми кубических метров в секунду.
Фигура 1c изображает график 100 после возникновения возмущения, описанного выше. Неограниченный экономический оптимум 102 остается в том же самом месте, как и перед тем, когда был создан новый ограниченный экономический оптимум 110 на основании возмущения. Новый ограниченный экономический оптимум 100 находится дальше от неограниченного экономического оптимума 102, чем ограниченный экономический оптимум 104, так как изменение ограничения 106 делает ограниченный оптимум 104 невозможным. В известной системе управления процессом установленного значения модуль APC будет пытаться находить возможную точку, которая минимизировала бы расстояние от ограниченного экономического оптимума 104, основываясь на своей экономической целевой функции. В этом примере эта точка представляет собой цель 112 APC, которая отличается от нового ограниченного экономического оптимума 110.
Однако так как модули RTO обычно работают не часто по сравнению с модулями APC, модуль APC будет управлять в направлении старых целей установленных значений (то есть ограниченного экономического оптимума 104) для расширенного периода времени, когда он ожидает новую установку целей установленных значений (то есть новый ограниченный экономический оптимум 108), который имеет преимущество большей площади для работы или экономическим путем регулирует уменьшение возможной области, которая возникает в результате изменения ограничений 106. Потенциально большая сумма прибыли будет потеряна между тем, когда ограничение 106 изменяется, и тем, когда модуль APC принимает новый набор целей с установленными значениями.
Поэтому, согласно известным подходам, для координирования операций между модулем RTO и модулем APC, как описано выше, когда в процесс вносятся возмущения (например, изменения температуры окружающей среды, изменения ограничений оператора и т.д.), модуль APC продолжает пытаться поддерживать процесс на значениях цели, первоначально установленных с помощью модуля RTO. Эти возмущения могут изменять ограничения, которые относятся к целям, путем ослаблений действующих ограничений или путем создания осуществимых целей. В первом случае, модуль APC не имеет преимущества в дополнительной "площади" в пределах допустимой области, так как модуль APC не знает о дополнительной "площади", выделенной за счет ослабления действующих ограничений. Во втором случае, модуль APC становится по возможности ближе к целям, который использует неэкономические критерии, и достигает, возможно, неоптимальной экономической точки. В любом случае, известная стратегия модуля APC не осуществляет поиск с целью оптимизации прибыли.
Кроме того, как упомянуто выше, модули RTO обычно действуют относительно редко по отношению к модулям APC. Одним примером является модуль RTO, запускаемый ежечасно по сравнению с модулем APC, который запускается каждую минуту. Решение RTO отстает от изменений, возникающих в процессе из-за нечастой работы модулей RTO. Время, которое проходит между тем, когда в процесс вносится возмущение, и новыми целями, которые поступают из модуля RTO, который принимает во внимание возмущение, представляет для модулей APC потерянную возможность. Чем более значительным является возмущение (по величине и продолжительности), тем больше вероятность увеличения времени между приемом обновленных целей, которые поступают из модуля RTO, поскольку модуль RTO требует, чтобы процесс находился в устойчивом состоянии для вычисления новых целей.
Технология, используемая в настоящее время для сопряжения модулей APC и модулей RTO, использует стратегию удаленной передачи установленных значений. Решение задач таким способом приводит к потери экономической информации, так как модуль APC не имеет информации относительно экономики первоначального процесса и уязвим для возмущений, вносимых в процесс, или изменений, в действие ограничений.
Таким образом, существует потребность в системе и способе координации использования модуля RTO с модулем APC для более близкого приближения к оптимальной экономической работе производственного процесса.
Краткое описание чертежей
Варианты осуществления настоящего изобретения изображены посредством примера и не посредством ограничения чертежами сопроводительных чертежей, на которых подобные ссылки обозначают подобные элементы. Следует отметить, что ссылки на "1" вариант осуществления настоящего изобретения в этом раскрытии необязательно относится к тому же самому варианту осуществления и обозначает, по меньшей мере, один.
Фигура 1a - график переменных TG1 и TG2 управления процессом, который относится к производственному процессу.
Фигура 1b - график переменных TG1 и TG2 управления процессом, который относится к производственному процессу после возмущения.
Фигура 1с - график переменных TG1 и TG2 управления процессом, который относится к производственному процессу после возмущения.
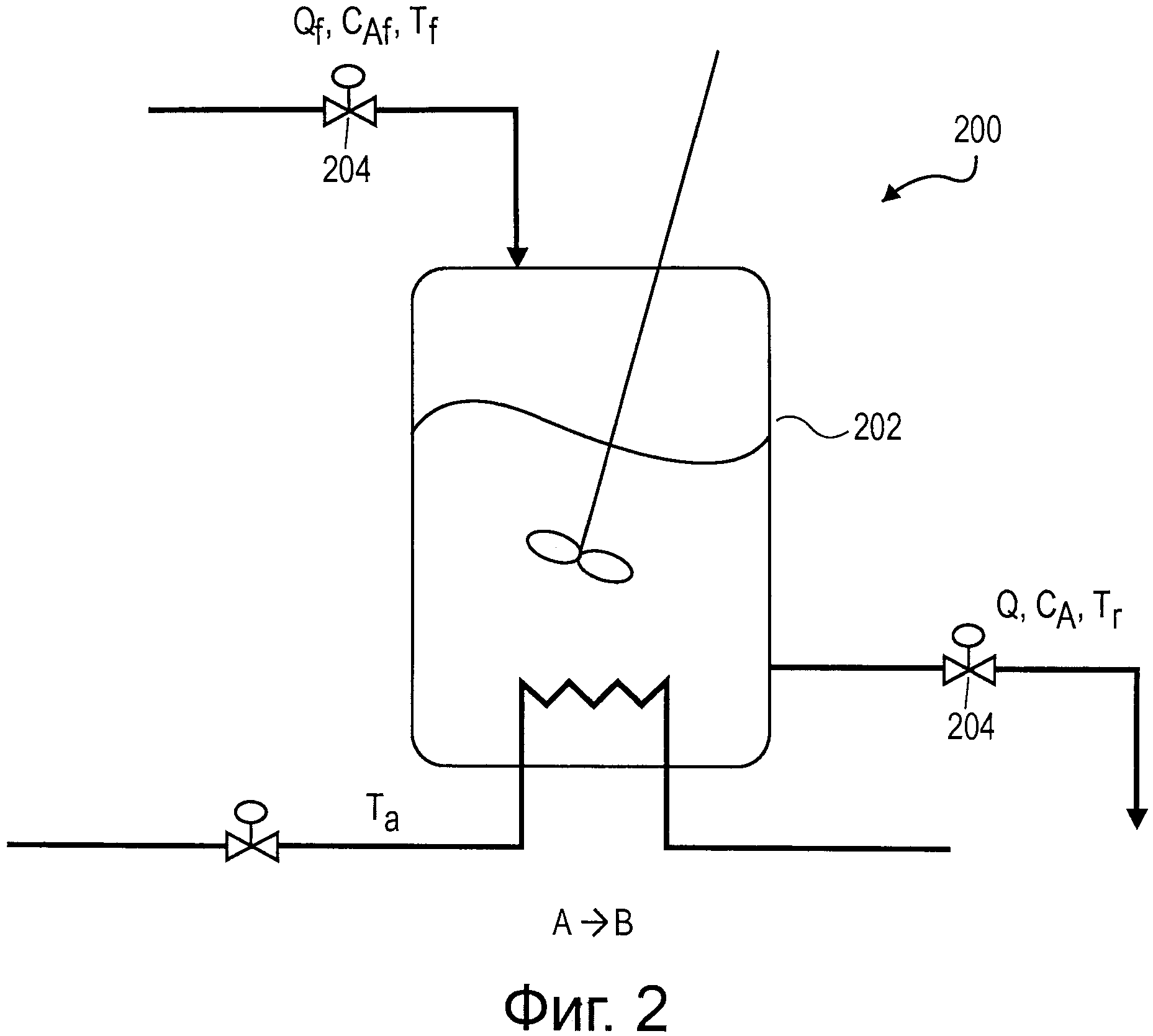
Фигура 2 изображает производственный процесс согласно варианту осуществления настоящего изобретения.
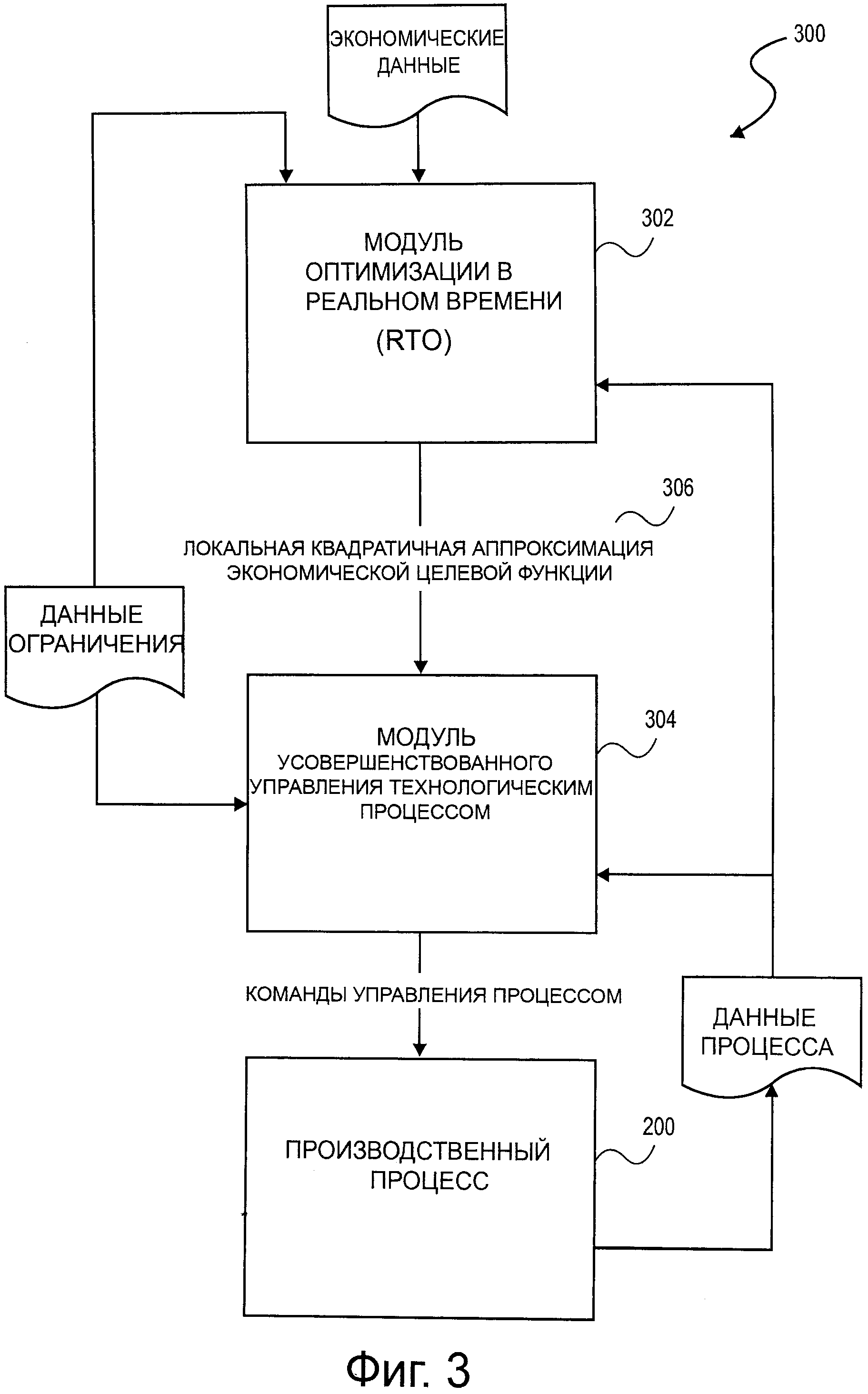
Фигура 3 - блок-схема системы управления процессом и оптимизации согласно варианту осуществления настоящего изобретения.
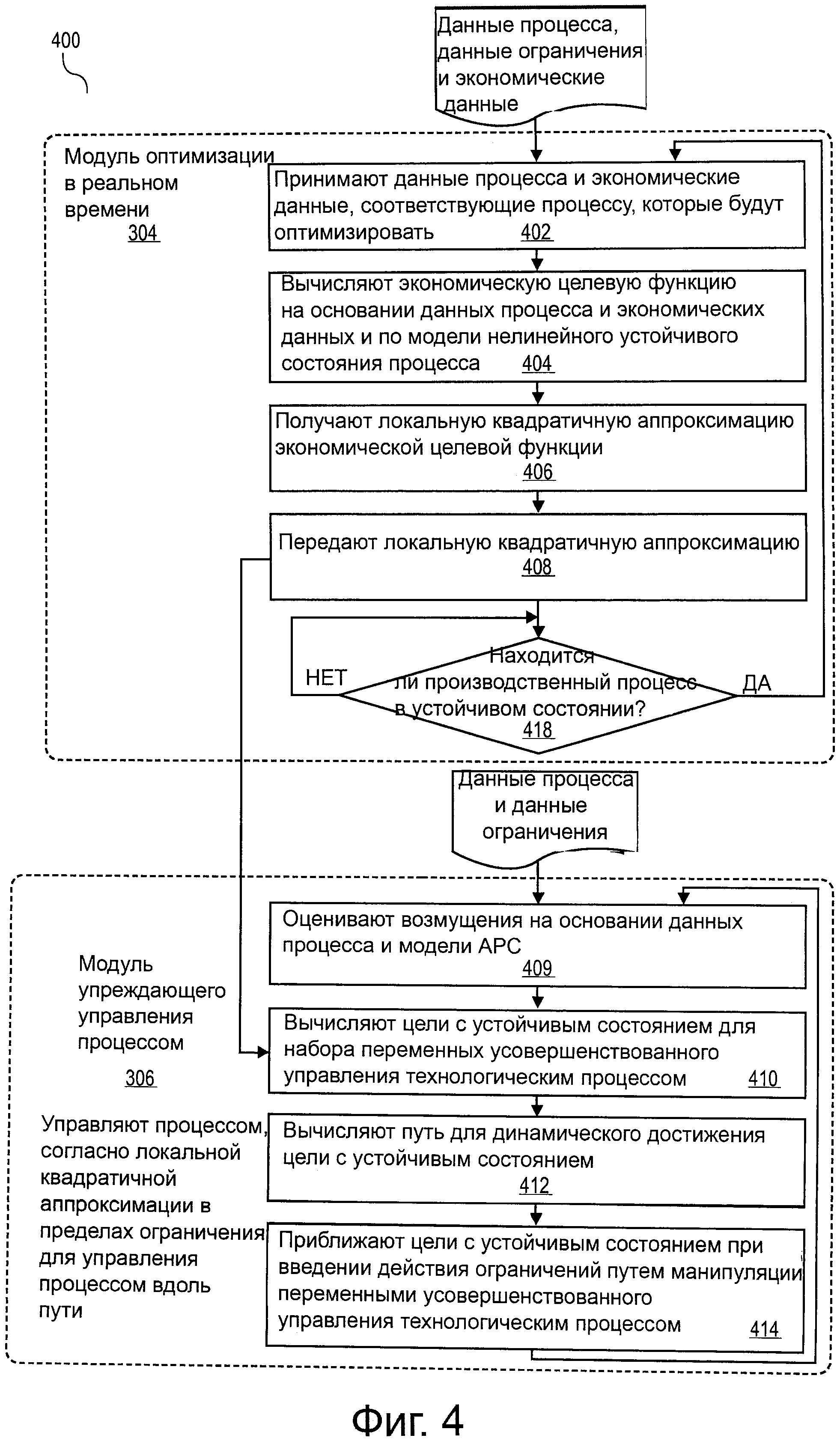
Фигура 4 - поток данных способа управления производственным процессом для управления производственным процессом согласно варианту осуществления настоящего изобретения.
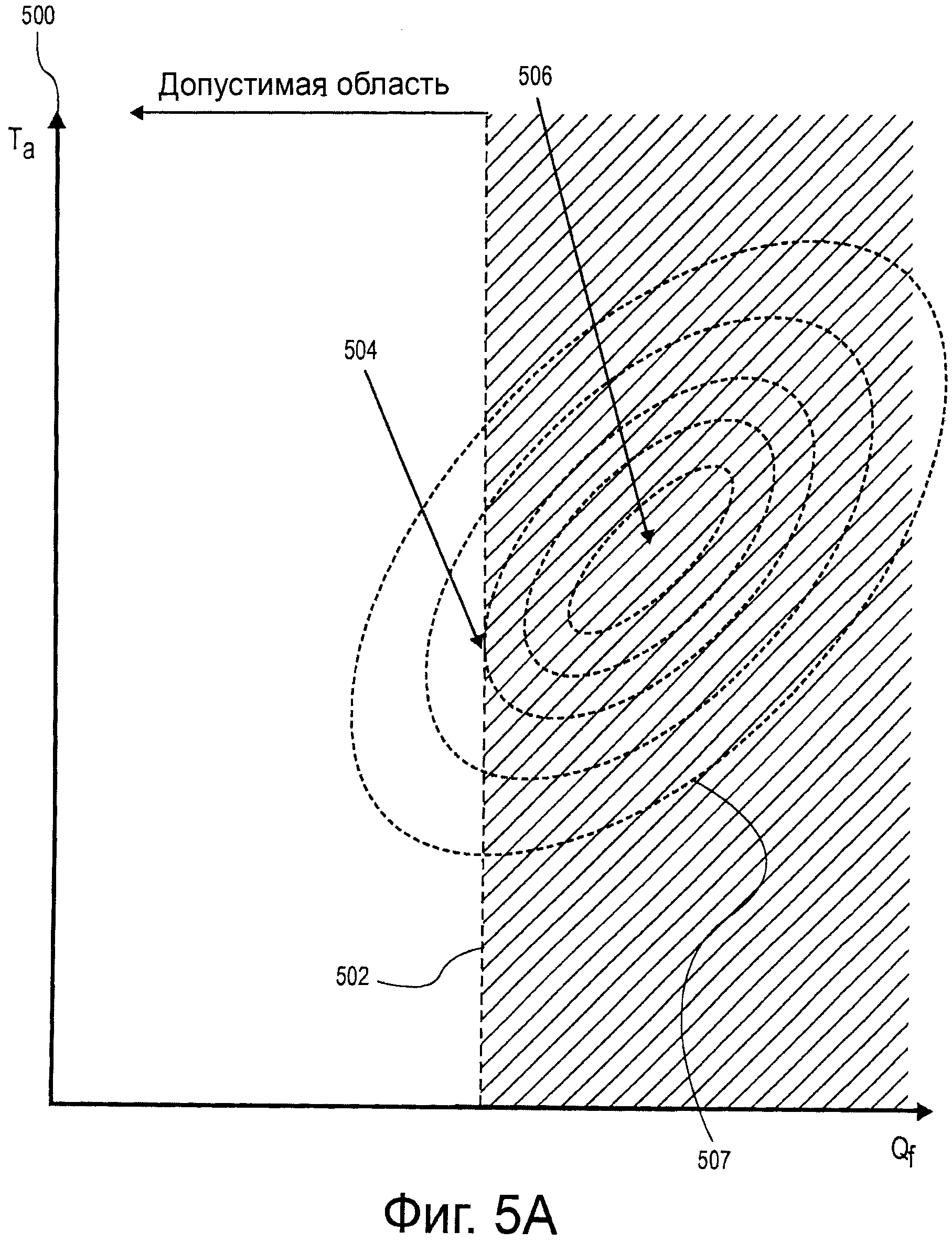
Фигура 5a - график переменных Qf и Ta управления процессом, который относится к производственному процессу.
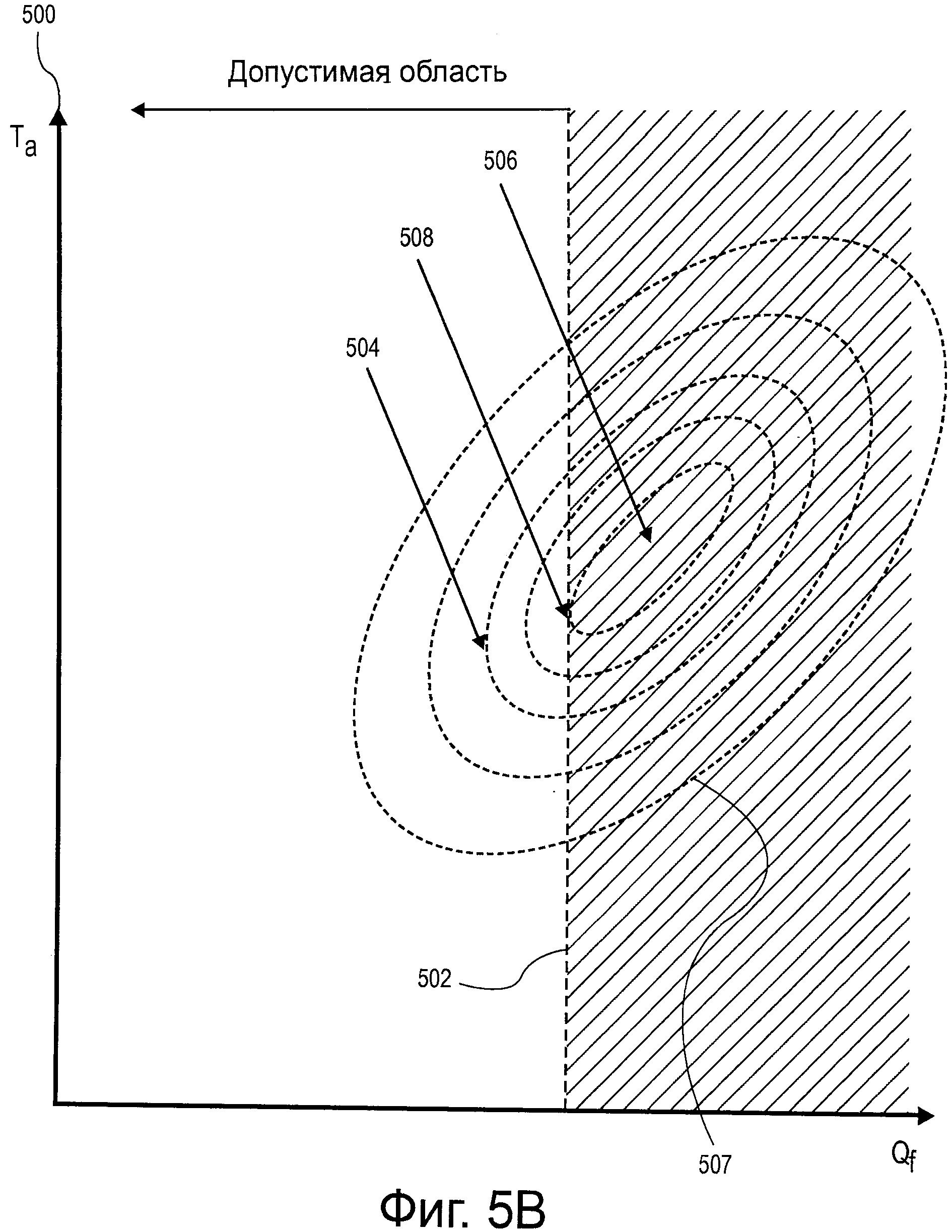
Фигура 5b - график переменных Qf и Ta управления процессом, который относится к производственному процессу после возмущения.
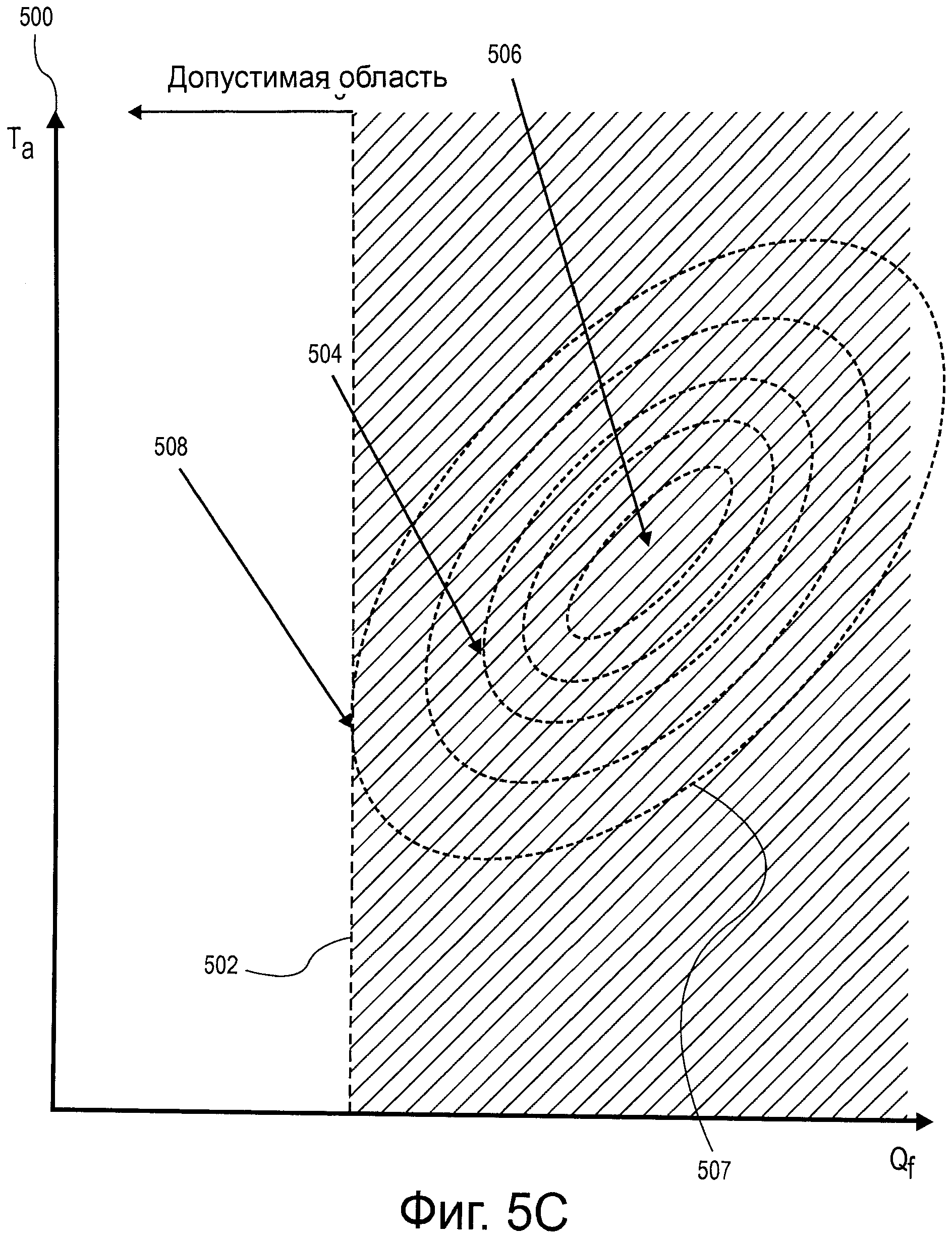
Фигура 5c - график переменных Qf и Ta управления процессом, который относится к производственному процессу после возмущения.
Подробное описание изобретения
Ниже приводится объяснение нескольких вариантов осуществления настоящего изобретения со ссылкой на сопроводительные чертежи. Хотя изложены многочисленные подробности, следует понимать, что некоторые варианты осуществления настоящего изобретения можно осуществить на практике без этих подробностей. В других примерах хорошо известные структуры и технологии не были показаны подробно для того, чтобы не усложнять понимание этого описания.
Фигура 2 изображает производственный процесс 200. Производственный процесс 200 преобразует вещество A в вещество B с использованием реакторной емкости 202. Производственный процесс 200 включает в себя впускной клапан 204, который впускает жидкость, которая содержит вещества A и B, в реакторную емкость 202 при концентрации CAf подаваемого вещества, скорости Qf потока подаваемого вещества и температуре Tf подаваемого вещества. Реакторный сосуд 202 преобразует вещество A в вещество B. Температуру реакторной емкости 202 регулируют с помощью охлаждающей жидкости при температуре Ta охлаждающей жидкости. В впускном клапане 206 возникает комбинация из вещества A и вещества B. Вещество A выпускается из выпускного клапана 206 при концентрации CA, температуре Tr и скорости Q потока, когда вещество B выпускается из выпускного клапана 206 при концентрации CB, температуре Tr и скорости Q потока. Ниже, со ссылкой на фигуры 3-5 будут описаны система и способ управления производственным процессом 200. Фигура 3 изображает систему 300 управления и оптимизации процесса согласно одному варианту осуществления. Система 300 управления и оптимизации процесса управляет производственным процессом 200 путем использования модуля 302 оптимизации в реальном времени (КТО) и модуля 304 усовершенствованного управления технологическим процессом (APC) таким образом, чтобы производственный процесс 200 работал в экономически оптимальном режиме.
Модуль 302 RTO действует как оператор производственного процесса 200 за счет построения функции, который описывает экономическую поверхность вокруг текущей рабочей точки для производственного процесса 200 таким образом, чтобы производственный процесс 200 мог достигнуть установленной цели. Модуль 304 APC действует как контроллер производственного процесса 200, который принимает экономическую функцию из модуля 302 RTO и строит маршрут и план на основании экономической функции для достижения установленной цели.
В одном варианте осуществления установленная цель (то есть экономическая задача) должна достигать оптимума экономической целевой функции для производственного процесса 200. Экономический оптимум для производственного процесса 200 соответствует состоянию производственного процесса 200, в котором максимизируется экономическая прибыль. Хотя экономический оптимум, который используется здесь, описан исходя из извлечения максимальной прибыли, экономический оптимум может быть альтернативно сфокусирован в направлении минимизации потребления энергии производственного процесса 200, максимизация производительности производственного процесса 200 или на любой другой аспект производственного процесса 200, который имеет влияние на экономику, безопасность, окружающую среду или надежность.
В одном варианте осуществления экономическая функция определяется экономической целевой функцией нелинейного устойчивого состояния, которое строится с помощью модуля 302 RTO. Экономическая целевая функция моделирует производственный процесс 200 и может использоваться модулем 304 APC для управления работой производственного процесса 200 в расчете на достижение установленной цели. Однако вместо установления связи экономической целевой функции с модулем 304 APC модуль 302 RTO получает локальную квадратичную аппроксимацию экономической целевой функции 306 и передает эту аппроксимацию в модуль 304 APC.
Локальная квадратичная аппроксимация экономической целевой функции 306 абстрагирует сложность экономической целевой функции, в то же время обеспечивая представительную оценку местоположения экономического оптимума с точки зрения переменных управления процессом. Соответственно, модуль 304 APC может анализировать местоположение ограниченного экономического оптимума на более высокой частоте, чем модуль 302 RTO, так как локальная квадратичная аппроксимация 306 упрощается по сравнению с экономической целевой функцией. В некоторых вариантах осуществления полный набор или поднабор переменных управления процессом может продвигать вперед переменные управления процессом.
В одном варианте осуществления модуль 302 RTO получает локально-квадратичную аппроксимацию экономической целевой функции 306 с использованием решающего устройства последовательного квадратичного программирования (SQP). Решающее устройство SQP строит локальную квадратичную аппроксимацию в каждой итерации своего решения. Локальная квадратичная аппроксимация из последней итерации решающего устройства соответствует локальной квадратичной аппроксимации экономической целевой функции 306.
В одном варианте осуществления модуль 302 RTO и модуль 304 APC могут работать на основе настольного компьютера, портативного персонального компьютера типа "лэптоп", компьютера типа нетбук, суперкомпьютера или любой другой подобной вычислительной платформы, которая позволяет вычислять локальную квадратичную аппроксимацию экономической целевой функции и управлять производственным процессом на основе локальной квадратичной аппроксимации. В одном варианте осуществления модуль 302 RTO и модуль 304 APC могут работать на отдельных компьютерах и поддерживать связь через сеть, такую как глобальная сеть, локальная сеть, сотовая сеть, сеть с двухточечным соединением и т.д. В другом варианте осуществления каждый модуль 302 RTO и модуль 304 APC работают на том же самом компьютере в режиме параллельной работы.
Система и способ управления производственным процессом 200 на основании локальной квадратичной аппроксимации экономической целевой функции 306 будет подробно описан ниже.
Фигура 4 изображает способ 400 управления производственным процессом для управления производственным процессом 200 согласно одному варианту осуществления. Способ 400 управления производственным процессом, показанный на фигуре 4, можно выполнить с помощью системы 300 управления и оптимизации процесса таким образом, чтобы способ 400 управления производственным процессом был выполнен частично с помощью модуля 302 RTO и модуля 304 APC. Соответственно, способ 400 управления производственным процессом, показанный на фигуре 4, назначает операции, выполняемые модулем 302 RTO, и операции, выполняемые модулем 304 APC.
Способ 400 управления производственным процессом начинает работу после получения данных о процессе, ограничениях и экономических данных от пользователя на этапе 402. Пользователь может быть человеком-оператором, машиной или комбинацией, которая передает данные процесса и экономические данные в способ 400 управления производственным процессом. В одном варианте осуществления данные процесса, ограничений и экономические данные принимают с помощью модуля 302 RTO посредством схемы восстановления доставленных или извлеченных данных.
Данные процесса включают в себя измеренные многочисленные и/или условные значения, соответствующие компонентам или операциям производственного процесса 200. Например, данные процесса могут содержать скорость потока, давления в реакторной емкости, температуру потока, состояние находящегося в эксплуатации теплообменника и т.д. Данные ограничений включают в себя нижний и верхний пределы переменных процесса. Экономические данные включают в себя экономические значения, связанные с сырьем, которое поступает в производственный процесс 200, экономические значения, связанные с продукцией, произведенной в ходе производственного процесса 200, или экономические значения, связанные с выполнением операций в производственном процессе 200. Например, экономические данные могут состоять из цен, которые связаны с коммунальными услугами, такими как за электричество, цены сырья и т.д. В одном варианте осуществления математическая модель нелинейного устойчивого состояния производственного процесса 200 используется с помощью способа 400 управления производственным процессом на этапе 404. В частности, математическая модель нелинейного устойчивого состояния может использоваться модулем 302 RTO. В одном варианте осуществления связь данных о процессе, данных ограничений и экономических данных с математической моделью выполняется путем использования сетевого носителя, хотя в другом варианте осуществления данные процесса, данные ограничений и экономические данные связаны с математической моделью путем использования совместно используемой памяти. Математическая модель нелинейного устойчивого состояния состоит из одного или более уравнений, которые устанавливают связь между физическими компонентами производственного процесса 200. Уравнения, которые входят в состав математической модели, определяют связи между переменными процесса производственного процесса 200, включая входы и выходы производственного процесса 200. Например, в производственном процессе 200 переменные процесса могут включать в себя концентрацию подаваемого вещества A на входе (CAf), скорость потока подаваемого вещества на входе (Of), температуру подаваемого вещества на входе (Tf), температуру (Ta) охлаждающей жидкости, концентрацию A на входе (Ca), температуру (Tf) реакторной емкости, концентрацию B на входе (CB) и скорость потока продукции на выходе (Q).
В одном варианте осуществления переменные управления процессом представляют собой набор переменных процесса, полный набор переменных процесса или поднабор переменных процесса, где переменные процесса могут быть регулируемыми переменными, управляющими переменными или комбинацией регулируемых и управляющих переменных. Регулируемая переменная соответствует переменной, чье состояние или величина при изменении (регулировке) регулирует или инициирует изменение в условии или величине управляющей переменной. Например, в производственном процессе 200 скорость потока подаваемого вещества на входе (CAf) и температура (Ta) охлаждающей жидкости могут быть регулируемыми переменными, потому что эти переменные можно непосредственно регулировать с помощью оператора производственного процесса 200. Кроме того, концентрация A на входе (CA), температура (Tr) реакторной емкости, концентрация B на выходе (CB) и скорость потока продукции на выходе (Q) можно рассматривать управляющими переменными, так как изменения регулируемых переменных, описанных выше, приведет к изменениям этих переменных.
После получения данных процесса и экономических данных, способ 400 управления производственным процессом вычисляет экономическую и целевую функцию с точки зрения принятого процесса и экономических данных на этапе 404. В одном варианте осуществления параметры математической модели регулируют для того, чтобы минимизировать разность между моделью и данными процесса. После этого экономическая целевая функция выражается через переменные процессы, представленные в модели и экономических данных. Соответственно, основываясь на комбинации процесса и экономических данных с помощью математической модели, полученная экономическая целевая функция устанавливает связь компонентов производственного процесса и операций с текущими экономическими факторами.
Вычисленная экономическая целевая функция представляет собой действующие экономики производственного процесса 200, который управляется с помощью способа 400 управления производственным процессом.
Хотя ограниченный экономический оптимум можно получить из экономической целевой функции, сложность типичных производственных процессов требует математических сложных экономических целевых функций для их представления. Соответственно, обработка экономической целевой функции для получения ограниченного экономического оптимума для производственного процесса 200 является дорогой с точки зрения времени и вычислительной мощности.
Возмущения определяются как изменения в любом из значений, которые вводятся в способе 400 управления производственным процессом, включая данные процесса, экономические данные и данные ограничений. В общем, возмущения представляют собой любое событие, которое влияет на характеристики производственного процесса 200. Например, возмущение может относиться к изменению в процессе, которое может быть вызвано явлением природы (например, изменениями температуры наружного воздуха) или изменением экономических факторов (например, колебаниями цен на сырье). С другой стороны, возмущение может относиться к изменению ограничения, которое может быть вызвано, например, изменением ранее установленного ограничения (например, регулировка ограничений, наложенных на переменную с помощью контроллера) или введением предела для новой переменной. Так как возмущение вносится в окружающую среду производственного процесса 200, сдвигается экономический оптимум для рабочего производственного процесса 200. Соответственно, способ 400 управления производственным процессом сдвигает работу производственного процесса 200 для того, чтобы обратить внимание на возмущение таким образом, чтобы производственный процесс 200 был сфокусирован на новом экономическом оптимуме, ускоряемом возмущением. Пример воздействия возмущения изображен на фигурах la, 1b и 1c, где возмущения, которые перемещают местоположения возмущения 106, создают новый ограниченный экономический оптимум 108 и ограниченный экономический оптимум 110.
Для того чтобы снизить стоимость определения экономического оптимума производственного процесса 200, способ 400 управления производственным процессом получает локальную квадратичную аппроксимацию экономической целевой функции 306, исходя из переменных управления процессом на этапе 406. Локальная квадратичная аппроксимация экономической целевой функции 306 абстрагирует сложность экономической целевой функции, в то же время обеспечивая репрезентативную оценку экономической поверхности рядом с текущей рабочей точкой производственного процесса 200. Основываясь на пониженной сложности локальной квадратичной аппроксимации 306, репрезентативную аппроксимацию ограниченного экономического оптимума можно получить в более короткий период времени и с пониженной нагрузкой на обработку компьютерной системы, такой как компьютерная система модуля 302 APC. Соответственно, получив аппроксимированный ограниченный экономический оптимум, основываясь на локальной квадратичной аппроксимации экономической целевой функции 306, система 300 управления оптимизации процессом может вычислить аппроксимированный ограниченный экономический оптимум на более высокой частоте по сравнению с использованием экономической целевой функции.
В одном варианте осуществления локальная квадратичная аппроксимация экономической целевой функции 306 получается посредством последовательных аппроксимаций экономической целевой функции. В одном варианте осуществления локальная квадратичная аппроксимация экономической целевой функции 306 состоит из нелинейной составляющей второго порядка и линейной составляющей первого порядка. В этом варианте осуществления нелинейная составляющая второго порядка может быть матрицей Гесса, и линейная составляющая первого порядка может быть вектором градиента. Вместе матрица Гесса и вектор градиента представляют собой экономическую поверхность в виде полного набора или поднабора переменных управления процессом. В одном варианте осуществления поднабор переменных управления процессом может соответствовать регулируемым переменным в модуле APC. В одном варианте осуществления локальная квадратичная аппроксимация экономической целевой функции 306 создается с помощью решающего устройства OPERA в пакете программного обеспечения точного моделирования в режиме онлайн с оптимизацией на основе уравнения (ROMeo®) с помощью программы SimSci-Essor, которая может быть частью модуля 302 RTO. В одном варианте осуществления локальная квадратичная аппроксимация получается в случае, когда решающее устройство используется для оптимизации экономической целевой функции при условии данных ограничений. После получения, локальная квадратичная аппроксимация экономической целевой функции 306 передается из модуля 302 RTO в модуль 304 APC на этапе 408 способа 400 управления производственным процессом. В одном варианте осуществления передача локальной квадратичной аппроксимации экономической целевой функции 306 из модуля 302 RTO в модуль 304 APC выполняется путем использования сетевой или шинной среды, хотя в другом варианте осуществления локальная квадратичная аппроксимация экономической целевой функции 306 передается путем использования совместно используемой памяти. В одном варианте осуществления модуль 304 APC принимает данные ограничения, связанные с переменными управления процессом производственного процесса 200 из источника, внешнего по отношению к системе 300 управления и оптимизации процесса, такого как человек-оператор производственного процесса 200.
После получения линейной квадратичной аппроксимации экономической целевой функции 306, модуль 304 APC управляет производственным процессом 200, основываясь на локальной квадратичной аппроксимации экономической целевой функции 306 при условии ограничений, внесенных в переменные управления процессом. Используя локальную квадратичную аппроксимацию экономической целевой функции 306 вместо целей установленных значений, установленных с помощью модуля 302 RTO, модуль 304 APC знает о влиянии изменений при рабочих условиях на экономические факторы производственного процесса 200 на всех периодах работы. Поддерживая знание контуров экономической целевой функции, модуль 304 APC может соответствующим образом осуществить сдвиг фокуса на новый ограниченный экономический оптимум, ускоренный возмущением в производственном процессе 200.
Например, фигура 5a изображает график 500 переменных Qf и Ta для производственного процесса 200. Оператор производственного процесса 200 может применить ограничение 502 к Qf таким образом, чтобы Qf не выросло выше десяти кубических метров в секунду. Соответственно, модуль 304 APC вычисляет цели устойчивого состояния для обоих значений Qf и Tf с использованием локальной квадратичной аппроксимации экономической целевой функции 306, которая сдерживает ограничения 502, установленные на Qf (то есть Qf≤десять кубических метров в секунду). Цели устойчивого состояния для Qf и Ta связаны с ограниченным экономическим оптимумом 504 для производственного процесса 200. Модуль 304 APC также знает о контурах экономической целевой функции 507 около неограниченного экономического оптимума 506. Хотя неограниченный экономический оптимум 506 представляет собой значения для Qf и Ta, которые предусматривают большую рентабельность для производственного процесса 200 по сравнению с ограниченным экономическим оптимумом 504, модуль 304 APC управляет производственным процессом 200 в направлении ограниченного экономического оптимума 504, так как должно соблюдаться ограничение 502.
Фигуры 5b и 5c изображают графики Qf в зависимости от Ta после возникновения возмущений. На фигуре 5b, возмущение изменяет ограничение 502 таким образом, что большая "площадь" предназначена для Qf, например, за счет изменения ограничения 502 от Qf≤десять кубических метров в секунду до Qf≤двенадцать кубических метров в секунду. На фигуре 5c, возмущение изменяет ограничение 502 таким образом, что для Qf предусмотрена меньшая "площадь", например, за счет изменения ограничений 502 от Qf≤десять кубических метров в секунду до Qf≤восемь кубических метров в секунду. В любом случае создается новый ограниченный экономический оптимум 508. Следовательно, модуль 304 APC управляет процессом в направлении нового ограниченного экономического оптимума 508, как описано ниже. Для краткости будет обсуждена только процедура управления процессом в направлении нового ограниченного экономического оптимума 508 в свете возмущения, показанного на фиг.5. Однако подобную процедуру можно использовать для управления процессом в направлении нового ограниченного экономического оптимума 508 в свете возмущения, показанного на фиг.5c.
На основании локальной квадратичной аппроксимации экономической целевой функции 306, модуль 304 APC может воспользоваться повышенной площадью для перемещения Qf, вызванного перемещением ограничения 502 с помощью возмущения (фигура 5b), и управлять процессом в направлении нового ограниченного экономического оптимума 508, который находится ближе к неограниченному экономическому оптимуму 506. Модуль APC сдвигает производственный процесс 200 в направлении новых целей с устойчивым состоянием для Qf и Ta вместо ожидания направления из модуля 302 RTO, как это выполняется в известной системе управления процессом с установленным значением. Таким образом, потенциально много прибыли будет реализовано в случае, когда не придерживаются старых целей при ожидании модуля 302 RTO выполнить новые цели с установленными значениями, но вместо этого получают новые экономически оптимальные цели с устойчивыми состояниями для переменных Qf и Ta на основании локальной квадратичной аппроксимации экономической целевой функции 306. Ниже будет описан способ, с помощью которого модуль 304 APC сдвигает фокус производственного процесса 200 от ограниченного экономического оптимума 504 к новому ограниченному экономическому оптимуму 508 несмотря на возмущения.
Как обсуждено ранее для способа 400 управления производственным процессом, при каждом использовании модуля 302 RTO, аппроксимация производственной экономической целевой функции передается в модуль 304 APC. На этапе 409 производят оценку возмущений на основании данных процесса и модели APC. На этапе 410 модуль 304 APC оптимизирует эту аппроксимированную экономическую целевую функцию по пространству регулируемых и управляемых переменных и подвергает модель APC последним оценкам возмущений и обрабатывает ограничения для определения набора экономически оптимальных целей с устойчивым состоянием для модуля APC. В одном варианте осуществления стандартное квадратичное программное средство для решения задач, такое как QPSOL/IPOPT, используется для оптимизации экономической целевой функции. Линейная динамическая модель используется в модуле 304 APC для предоставления связи между регулируемыми и управляемыми переменными производственного процесса 200. Для вычисления ограниченного экономического оптимума используется представление устойчивого состояния линейной динамической модели. Оценки возмущения представляют собой важный элемент модели APC, и они получаются с использованием функции оценки состояния для неизмеренных возмущений и измерений в реальном времени для измеренных возмущений. Ограничения процесса представлены в виде ограничений-неравенств в проблеме оптимизации. В другом варианте осуществления элементы матрицы Гесса и вектор градиента передаются в контроллер Exasmoc® APC с помощью корпорации Йокогава Электрик Корпорейшн (Yokogawa Electric Corporation) при каждом использовании модуля 302 RTO. Контроллер Exasmoc® оптимизирует эту экономическую задачу при условии модели линейных процессов, ограничений и оценок возмущений. Решение этой проблемы оптимизации перед каждым использованием модуля 304 APC вырабатывает цели с устойчивым состоянием, которые модуль APC нацеливает на управление вперед.
В период времени, в котором используется модуль 302 RTO, ограниченный экономический оптимум 504 представляет собой устойчивое состояние производственного процесса 200, в котором экономическая прибыль максимизируется при соблюдении всех ограничений (следовательно, вероятного, экономически оптимального устойчивого состояния). В одном варианте осуществления ограниченный экономический оптимум 504 выражается в виде целей устойчивого состояния для одной или более переменных управления процессом, которые являются частью производственного процесса 200. Например, как обсуждено выше, ограниченный экономический оптимум 504 можно представить в виде цели устойчивого состояния для скорости потока подаваемого вещества на входе (Qf) и температуры (Ta) охлаждающей жидкости.
В период между выполнением функций RTO могут иметь место изменения в рабочих условиях производственного процесса 200. Эти изменения могут иметь форму изменений ограничений или новых возмущений процесса в производственном процессе 200. В одном варианте осуществления новые оценки возмущений вычисляют при каждом использовании модуля 304 APC. Проблема экономической оптимизации, основанная на локальной квадратичной аппроксимации экономической целевой функции 306, решается при каждом использовании модуля 304 APC для вычисления экономически оптимальных целей с устойчивым состоянием при новом процессе и/или условиях ограничения.
На этапе 412 способа 400 управления производственным процессом определяют маршрут для переменных управления процессом таким образом, чтобы они достигли вычисленной экономической оптимальной цели 508 устойчивого состояния, полученного на этапе 410 при самом последнем наборе ограничений и условий процесса. В одном варианте осуществления маршрут включает в себя прогноз перемещений регулируемых переменных таким образом, чтобы переменные управления процессом направлялись для достижения экономически оптимальных целей устойчивого состояния. В другом варианте осуществления промежуточные цели вырабатываются перед достижением ограниченного экономического оптимума 508 производственного процесса 200. Например, для скорости потока подаваемого вещества на входе (Qf) с окончательной целью одиннадцать кубических метров в секунду, набор промежуточных целей может включать в себя два кубических метра в секунду, четыре кубических метра в секунду, шесть кубических метров в секунду, восемь кубических метров в секунду и десять кубических метров в секунду. Маршрут завершается после достижения цели - одиннадцати кубических метров в секунду, которая соответствует ограниченному экономическому оптимуму 508.
В одном варианте осуществления вычисленный путь может представлять собой самый быстрый маршрут для ограниченного экономического оптимума 508. В одном варианте осуществления ранги и/или веса применяются к одним или более переменным управления процессом таким образом, что цель, связанная с наиболее высокой по рангу или наиболее высокой по весу переменной управления процессом, считается более важным с помощью способа 400 управления производственным процессом, чем более низкая по рангу или меньшая по весу переменная управления процессом. Соответственно, высокая по весу переменная управления процессом считается более важной, чем меньшая по весу переменная управления процессом. Например, скорость потока подаваемого вещества на входном клапане (Qf) может считаться более важной, чем температура (Ta) охлаждающей жидкости. Таким образом, (Qf) связана с весом, при этом такой модуль 304 APC рассматривает цель для Qf с большей срочностью, чем цель для Ta. В другом варианте осуществления вычисленный путь представляет собой экономически оптимальную траекторию для достижения экономически оптимального устойчивого состояния, основанного на локальной квадратичной аппроксимации экономической целевой функции 306.
В одном варианте осуществления вычисленный путь представляет собой прогноз, при каждом использовании модуля 304 APC, только в процессе применяется только первое перемещение для каждой регулируемой переменной в выработанном пути для достижения экономически оптимального устойчивого состояния 508. В следующем цикле использования APC вырабатывается новый прогноз и снова применяется только первое перемещение для каждой регулируемой переменной.
В одном варианте осуществления при каждом использовании модуля управления процессом, состояние системы и неизмеренное возмущение оценивается с использованием фильтра Калмана, в котором линейная динамическая модель дополняется входной и/или выходной моделью возмущения. При вычислении экономически оптимальных целей с устойчивым состоянием используются текущие пределы для регулируемых и управляемых переменных. Частоту, при которой используется способ 400 управления производственным процессом, можно предварительно установить с помощью пользователя после начала способа 400 управления производственным процессом. Например, модуль 304 APC можно использовать каждую минуту, как описано выше.
После этого способ 400 управления производственным процессом продолжает операцию, как описано ранее, таким образом, чтобы процесс направлялся в направлении нового ограниченного экономического оптимума 508.
В частности, переменная управления процессом, связанная с производственным процессом 200, регулируется для прохождения пути в направлении нового ограниченного экономического оптимума 508. В результате, способ 400 управления производственным процессом продолжает вычислять возмущения и при необходимости регулировать новый ограниченный экономический оптимум 508.
Если производственный процесс 200 находится в устойчивом состоянии, как определено на этапе 408, способ 400 управления производственным процессом возвращается на этап 402 так, что новая локальная квадратичная аппроксимация экономической целевой функции получается на основании текущего состояния производственного процесса 200. В одном варианте осуществления свежие данные процесса и экономические данные считываются в способе 400 управления производственным процессом на основании текущих зарегистрированных значений. Как описано выше, новая локальная квадратичная аппроксимация экономической целевой функции вычисляется с помощью модуля 302 RTO и передается в модуль 304 APC. Эта новая локальная квадратичная аппроксимация экономической целевой функции принимает во внимание изменение в экономических данных или в состоянии оборудования процесса, так как была получена последняя локальная квадратичная аппроксимация. Это также принимает во внимание изменение в форме нелинейной экономической целевой функции, возникающее в результате изменения рабочей точки, которые не захватываются при локальной квадратичной аппроксимации экономической целевой функции. Основываясь на этой вновь полученной локальной квадратичной аппроксимации экономической целевой функции, способ 400 управления производственным процессом направляет переменную управления в новый ограниченный экономический оптимум. Следовательно, способ 400 управления производственным процессом продолжает контролировать возмущение и регулировать цели для переменных управления процессом и при необходимости регулировать цели для переменных управления процессом.
Выше были описаны различные аспекты системы и способа управления производственным процессом с ограниченным экономическим оптимумом при использовании локальной квадратичной аппроксимации экономической целевой функции, передаваемой из модуля RTO в модуль APC. Как описано выше, вариант осуществления настоящего изобретения может быть машиночитаемым носителем информации, таким как один или более твердотельных запоминающих устройств, имеющих сохраненные на них инструкции, которые программируют один или более компонентов обработки данных (которые, в общем, называются здесь "процессором") для выполнения некоторых операций, описанных выше. В других вариантах осуществления некоторые из этих операций можно выполнить с помощью специфических компонентов аппаратных средств, которые содержат жесткую логику. Эти операции можно альтернативно выполнить с помощью комбинации программируемых компонентов обработки данных и фиксированных компонентов схем аппаратных средств.
Хотя определенные варианты осуществления были описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются только иллюстративными и не ограничивающими объем изобретения, и что настоящее изобретение не ограничено показанными и описанными специфическими конструкциями и размещениями, так как для специалистов в данной области техники могут иметь различные другие модификации.
Сепаратор газа и твердых частиц
Способ добычи нефти и/или газа (варианты)
Реакторная система, абсорбент и способ осуществления реакции в подаваемом материале
Способ получения диарилкарбоната
Установки и способы для получения среднедистиллятного продукта и низших олефинов из углеводородного исходного сырья
Керосиновое базовое топливо
Способ удаления капель загрязняющей жидкости из потока газа и промывочный лоток
Способ удаления цианистого водорода и аммиака из синтез-газа
Система и способ добычи нефти и/или газа (варианты)
Способ регулирования расхода газа между множеством потоков газа
Сепаратор газа и твердых частиц
Способ добычи нефти и/или газа (варианты)
Реакторная система, абсорбент и способ осуществления реакции в подаваемом материале
Способ получения диарилкарбоната
Установки и способы для получения среднедистиллятного продукта и низших олефинов из углеводородного исходного сырья
Способы получения неочищенного продукта
Керосиновое базовое топливо
Производство трубчатого тела, содержащего два или более слоя спирально выгнутых полос
Способ удаления капель загрязняющей жидкости из потока газа и промывочный лоток
Способ удаления цианистого водорода и аммиака из синтез-газа

