Результат интеллектуальной деятельности: ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС
Вид РИД
Изобретение
Изобретение относится к области приборостроения, а именно к бортовым цифровым программно-аппаратным комплексам, установленным на подвижных объектах и обеспечивающим прием, обработку информации, поступающей с приборов и систем объекта, решение сервисных задач, а также выдачу информации в формализованной форме на устройства передачи и хранения информации.
Известен программно-аппаратный комплекс топопривязчика (см. патент RU №2468338, опубл. 27.11.12 г.), принятый за прототип. Программно-аппаратный комплекс топопривязчика содержит комплекс аппаратных средств бортовой цифровой вычислительной машины, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, проведение вычислительных процессов и представление индикационно-управляющих параметров, программно-алгоритмические средства. Связь комплекса аппаратных средств БЦВМ с бортовым оборудованием осуществляется через согласующие модули: блок согласования, выполненный с возможностью обеспечения управления работой первичных навигационных датчиков и состоящий из центрального процессора, приемопередатчика интерфейса RS-232, приемопередатчика интерфейса радиального последовательного, модулей памяти, буферированного регистра разовых команд ввода-вывода и модуля питания, блока обработки данных, выполненного с возможностью приема информации от датчика температуры и измерителя цифрового атмосферного давления, ее преобразования и вычисления значения высоты, а также для выработки напряжения питания для датчиков и состоящего из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора. ПАК оснащен периферийным устройством - вспомогательной ЭВМ, выполняющей задачи по хранению, отображению, обработке информации, комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения, выполненного с возможностью решения прямой и обратной навигационных задач, комплексирования сигналов навигационных систем, работы с цифровыми электронными картами, поддержки интерфейса оператора, решения сервисных задач.
Недостатками прототипа являются:
- высокие массогабаритные показатели вычислительных средств;
- высокая конфигуративная сложность комплекса;
- низкая степень автоматизации и наглядности работ по контролю работоспособности изделия, калибровочных работ;
- высокая вероятность совершения экипажем ошибочных действий при длительной работе.
Предлагаемым изобретением решается задача по повышению эффективности, надежности и точности подвижных пунктов навигации и топопривязки.
Технический результат, получаемый при осуществлении изобретения, заключается в создании программно-аппаратного комплекса топопривязчика, обеспечивающего прием и обработку информации, поступающей от соответствующих устройств топопривязчика, высокое качество проведения автоматизированного определения и контроля работоспособности и калибровки его приборов и систем, дополнительные возможности по концентрации внимания экипажа.
Указанный технический результат достигается тем, что в предлагаемом программно-аппаратном комплексе топопривязчика, содержащем бортовую цифровую вычислительную машину, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, программно-алгоритмические средства, блок согласования, периферийное устройство, новым является то, что в качестве бортовой цифровой вычислительной машины используется моноблочный панельный компьютер, а в качестве периферийного устройства - моноблочный панельный монитор, программно-аппаратный комплекс оснащен системой автоматизированного встроенного контроля работоспособности систем и сборочных единиц, входящих в состав программно-аппаратного комплекса и топопривязчика, с возможностью отображения следующей информации о текущем состоянии систем и сборочных единиц на мониторе панельного компьютера в режиме «Состояние»: текущие данные топопривязчика и текущее состояние соответственно по данным бесплатформенной инерциальной навигационной системы, аппаратуры спутниковой навигации, системы определения высоты, текущее состояние датчика скорости доплеровского, механического датчика скорости, блока согласования и аппаратуры передачи данных, системой звукового оповещения о возникновении каких-либо событий, возникающих в самом комплексе или в системах, связанных с ним: голосовое подтверждение возникших оперативных сообщений о возникших неисправностях, о готовности топопривязчика к движению после запуска режима гирокомпасирования бесплатформенной инерциальной навигационной системы, рекомендуемой скорости движения и изменения направления движения, голосовое сообщение о местонахождении топопривязчика на маршруте, проложенном на цифровой карте местности, программно-алгоритмические средства выполнены с возможностью выполнения задачи по определению и контролю поправки для работы с установленным на топопривязчике визиром, которая вводится в панельный компьютер, значений коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок (поправок в углы) этих датчиков, характеризующих проекции динамических осей топопривязчика относительно бесплатформенной инерциальной системы, значений поправок для определения крена и тангажа, значений поправки на местное время.
Использование в качестве бортовой цифровой вычислительной машины моноблочного панельного компьютера, а в качестве периферийного устройства - моноблочного панельного монитора позволяет:
- снизить массогабаритные показатели устройства;
- улучшить эргономические показатели рабочих мест операторов;
- повысить эффективность вычислительных средств программно-аппаратного комплекса.
Оснащение программно-аппаратного комплекса системой автоматизированного встроенного контроля работоспособности систем и сборочных единиц, входящих в состав программно-аппаратного комплекса и топопривязчика, позволяет:
- обеспечить постоянный контроль работоспособности программно-аппаратного комплекса, оперативное проведение калибровочных работ перед введением топопривязчика в эксплуатацию, после проведения регламентных или ремонтных мероприятий;
- упростить работу экипажа топопривязчика и служб, проводящих техническое обслуживание и ремонтные работы;
- повысить общий технический уровень комплекса.
Обеспечение возможности отображения информации о текущем состоянии систем и сборочных единиц на мониторе панельного компьютера в режиме «Состояние» позволяет:
- контролировать техническое состояние и работоспособность приборов, входящих в состав программно-аппаратного комплекса и приборов, установленных на топопривязчике и связанных с ним;
- увеличить ресурс топопривязчика за счет своевременного и адресного обнаружения неисправностей.
Оснащение программно-аппаратного комплекса системой звукового оповещения о возникновении каких-либо событий, возникающих в самом комплексе или в системах, связанных с ним, позволяет:
- продублировать появляющиеся на мониторе панельного компьютера оперативные сообщения о возникающих неисправностях;
- проконтролировать и получить рекомендации по движению топопривязчика по маршруту, проложенному на цифровой карте местности;
- поддерживать высокую концентрацию внимания членов экипажа, снизить напряжение при выполнении полученного задания.
Выполнение программно-алгоритмических средств с возможностью выполнения задачи по определению и контролю поправки для работы с установленным на топопривязчике визиром, которая вводится в панельный компьютер, позволяет:
- обеспечить точность определения углового положения топопривязчика;
- упростить технологический процесс юстировки.
Выполнение программно-алгоритмических средств с возможностью выполнения задачи по определению и контролю значений коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок (поправок в углы) этих датчиков, характеризующих проекции динамических осей топопривязчика относительно бесплатформенной инерциальной системы, значений поправок для определения крена и тангажа, значений поправки на местное время позволяет:
- своевременно вносить значения поправок в соответствующие документы, которые должны вестись в топопривязчике;
- поддерживать необходимую точность навигационных определений на всем времени эксплуатации топопривязчика.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
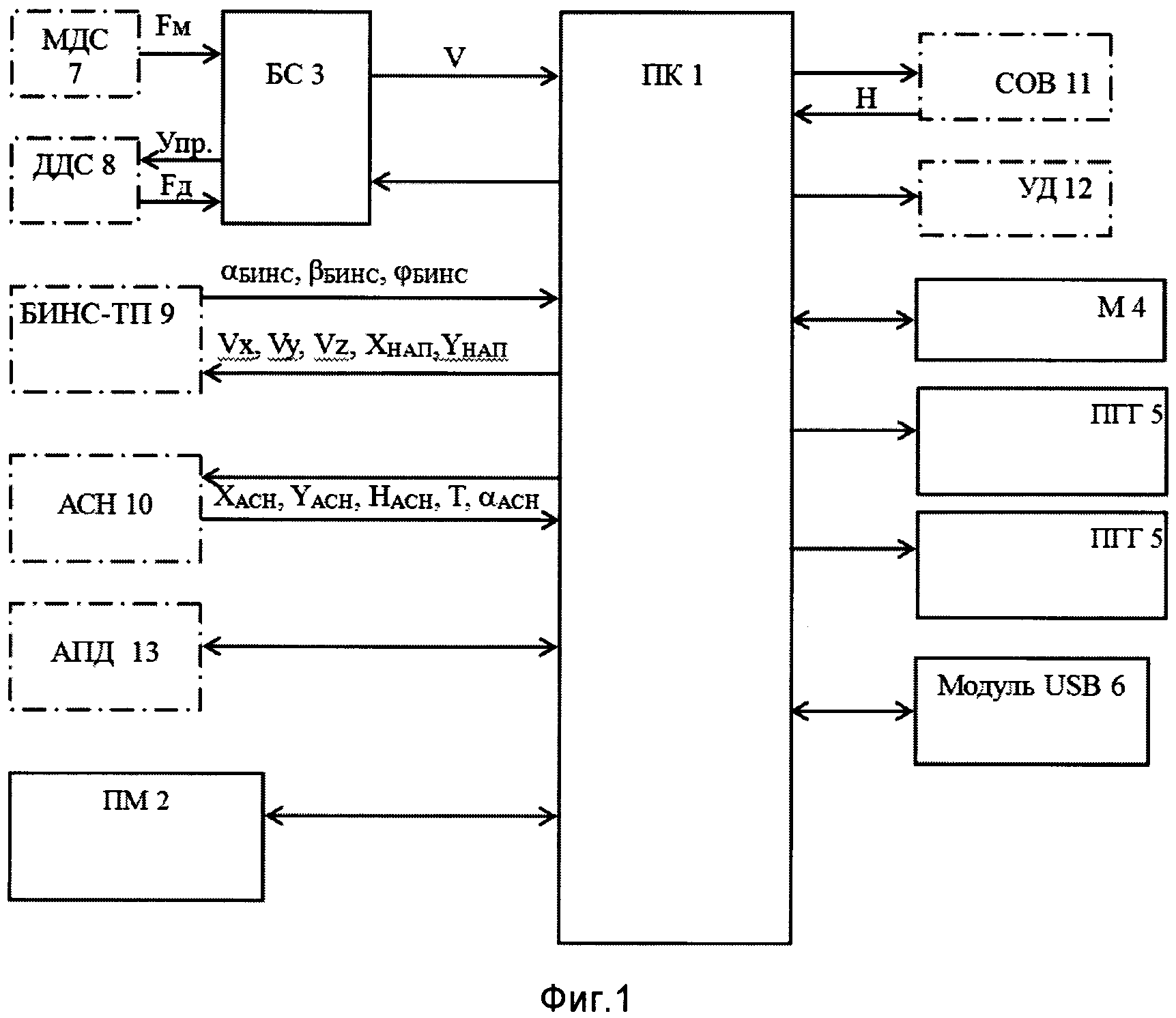
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема программно-аппаратного комплекса топопривязчика; на фиг. 2 - рабочее окно пункта меню «Состояние»; на фиг. 3 - рабочие окна задачи «Определение поправки с визира»; на фиг. 4 - рабочее окно задачи калибровка; фиг. 5 - рабочее окно вкладки «Поправки».
Программно-аппаратный комплекс (ПАК) топопривязчика содержит моноблочный панельный компьютер (ПК) 1, моноблочный панельный монитор (ПМ) 2, блок согласования (БС) 3, манипулятор (М) 4, систему звукового оповещения (СЗО), состоящую из двух панелей громкоговорителя (ПГГ) 5, модуль USB 6. ПАК связан со следующими источниками навигационной информации: механическим датчиком скорости (МДС) 7, доплеровским датчиком скорости (ДДС) 8, бесплатформенной инерциальной навигационной системой (БИНС-ТП) 9, аппаратурой спутниковой навигации (АСН) 10, системой определения высоты (СОВ) 11. Выдача информации с ПАК производится на устройство документирования (УД) 12 и аппаратуру передачи данных (АПД) 13.
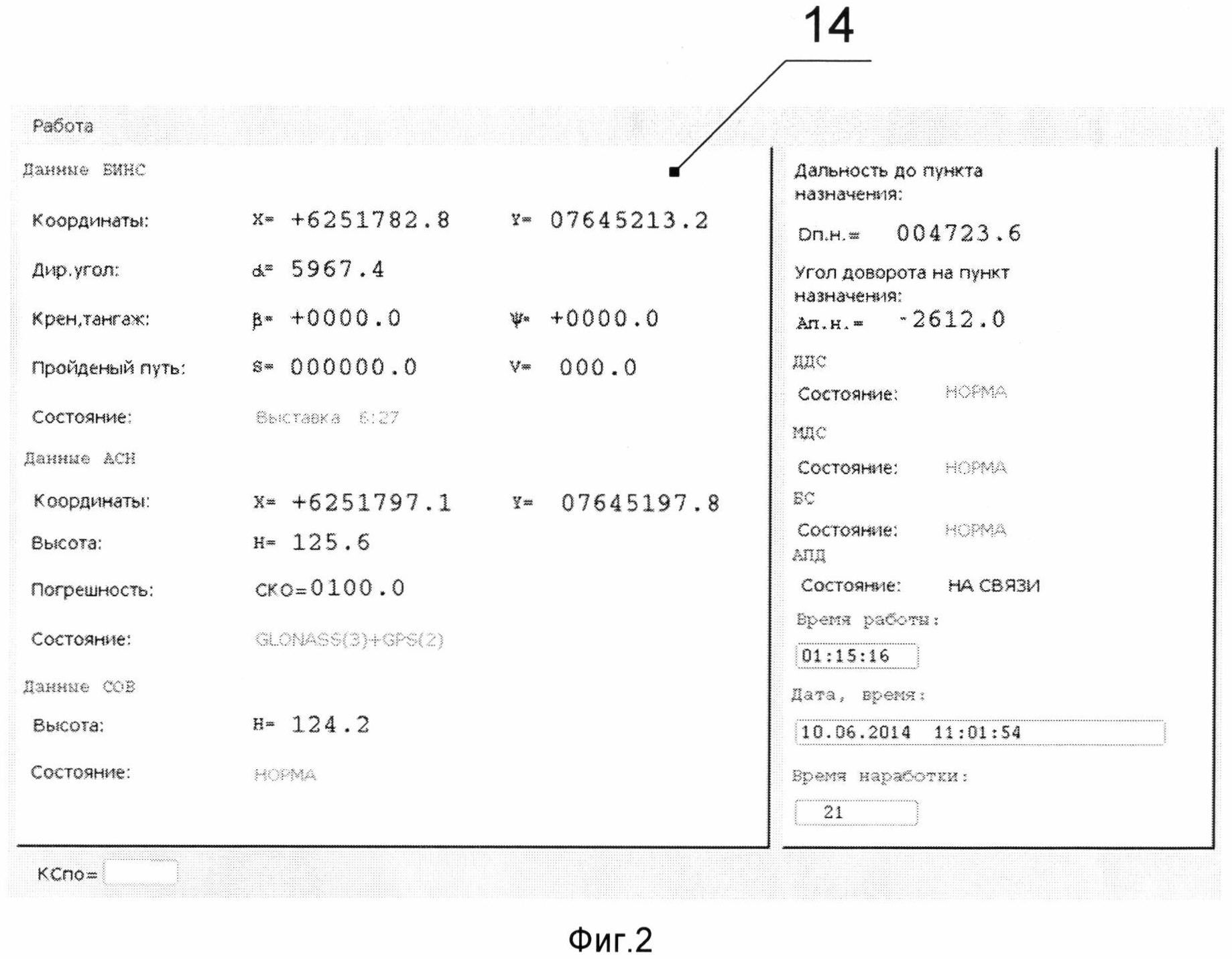
Программно-аппаратный комплекс оснащен системой автоматизированного встроенного контроля работоспособности систем и сборочных единиц. Информация об этом выводится в рабочем окне 14 пункта меню «Состояние».
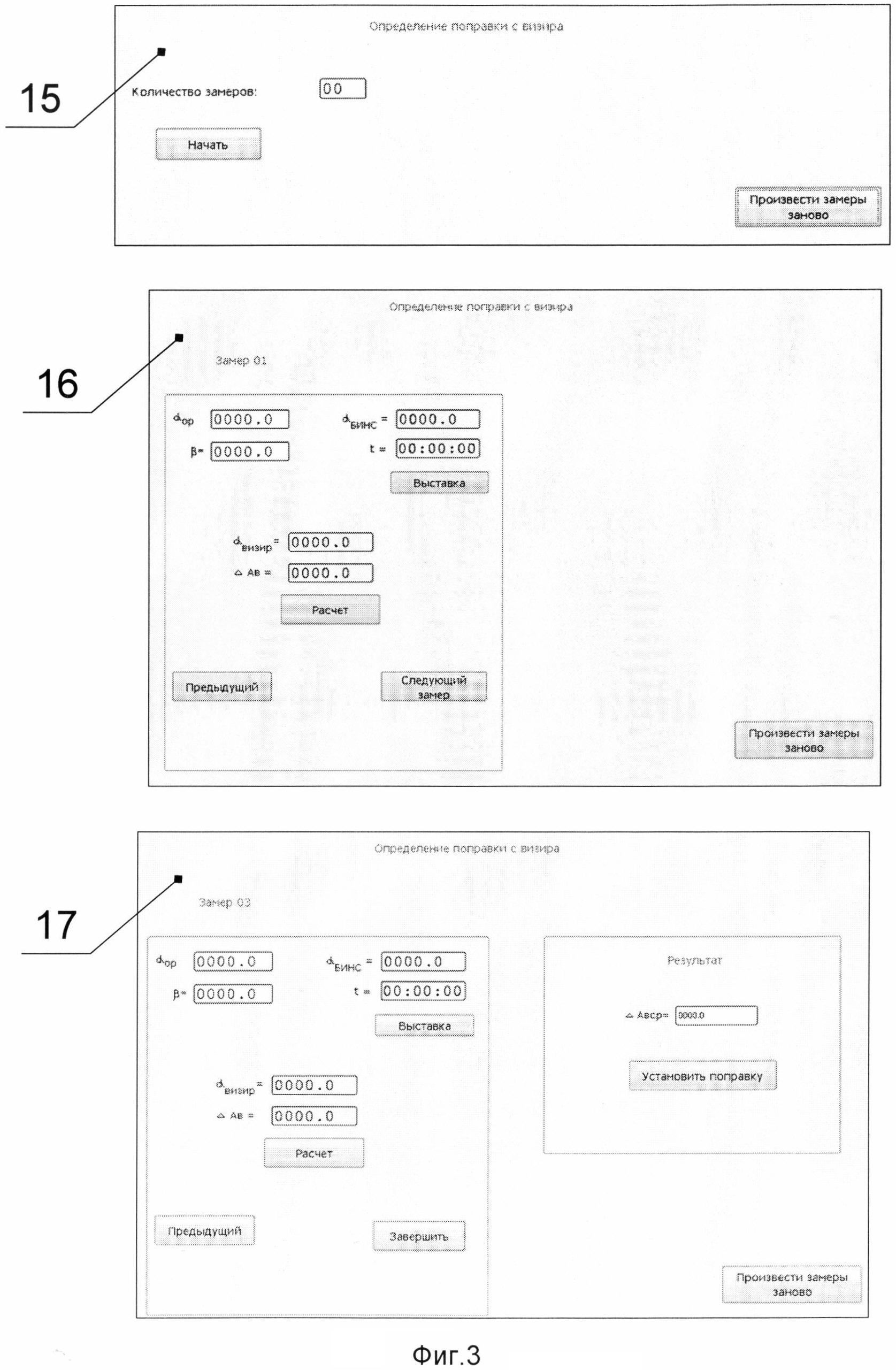
Программно-алгоритмические средства выполнены с возможностью выполнения задачи по определению и контролю поправки для работы с установленным на топопривязчике визиром. Информация об этом выводится в рабочих окнах 15, 16 и 17 задачи «Определение поправки с визира».
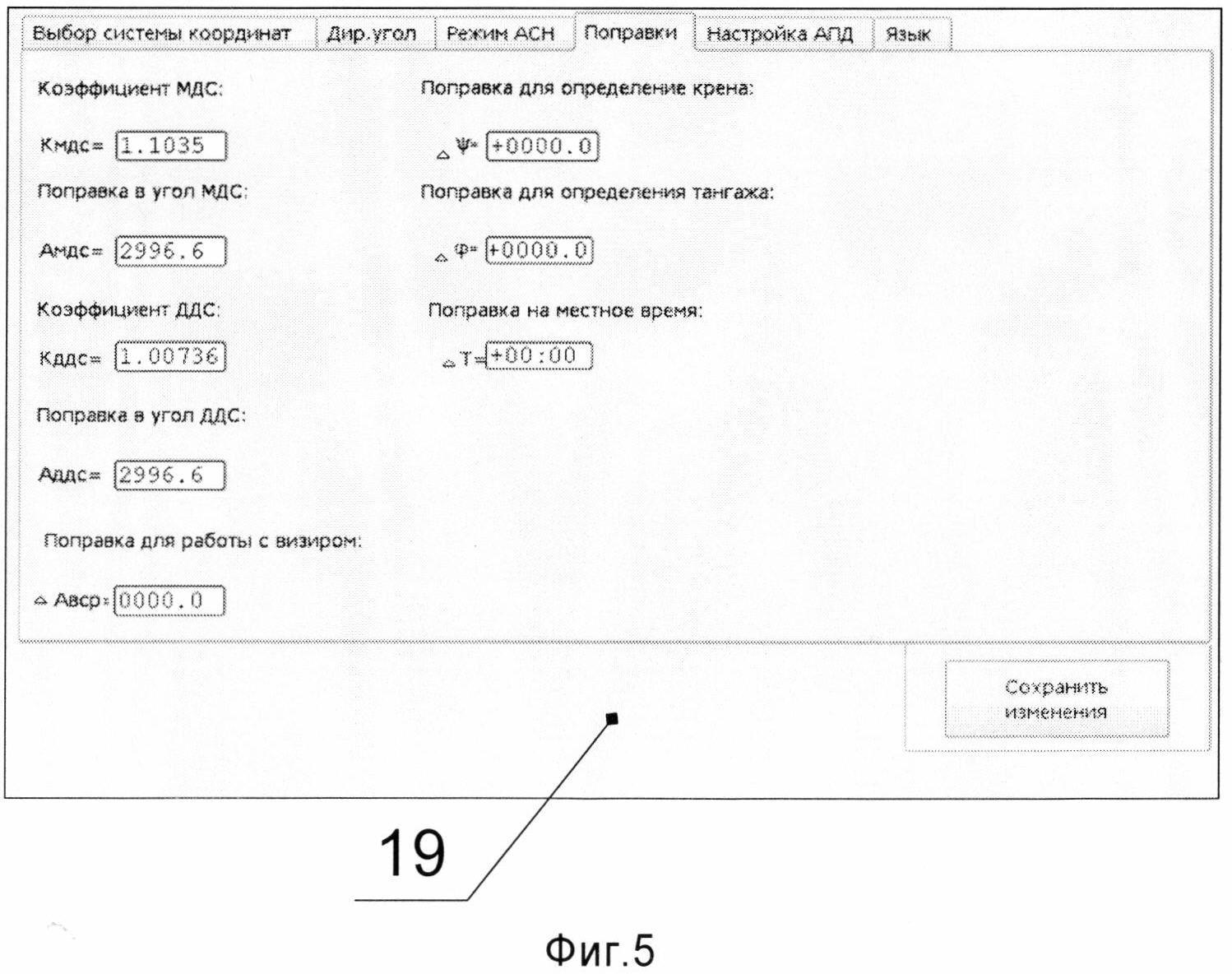
Программно-алгоритмические средства выполнены с возможностью определения и контроля значений коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок (поправок в углы) этих датчиков, характеризующих проекции динамических осей топопривязчика относительно бесплатформенной инерциальной системы, значений поправок для определения крена и тангажа, значений поправки на местное время. Информация об этом выводится в рабочих окнах 18 и 19 задачи «Калибровка» и вкладки «Поправки».
ПАК функционирует следующим образом. ПАК обеспечивает прием и обработку информации, поступающей со следующих устройств: БИНС-ТП 9, МДС 7, ДДС 8, СОВ 11, АСН 10, АПД 13, УД 12, отображение текущей информации и результатов ее обработки, решение сервисных задач, запись результатов обработки текущей информации и решений сервисных задач на модуль USB, а также вывод на УД 12, работу с геодезической информационной системой «Интеграция» (цифровые карты местности), обмен информацией с потребителями через АПД 13 по системе связи и передачи данных.
ПАК также обеспечивает контроль технического состояния приборов и систем.
Входными данными для решения навигационных задач являются:
- значение скорости объекта V (определяется по сигналам МДС 7 и ДДС 8 в БС 3);
- значения дирекционного угла продольной оси αБИНС, углов крена βБИНС и тангажа ψБИНС топопривязчика, определенных БИНС-ТП 9;
- значения дирекционного угла продольной оси αНАП, координат XАСН, YАСН, HАСН и времени T, определенных АСН 10;
- значение высоты H, определенное СОВ 11.
Ввод и редактирование информации осуществляется оператором с помощью клавиатуры ПК 1 и Μ 4.
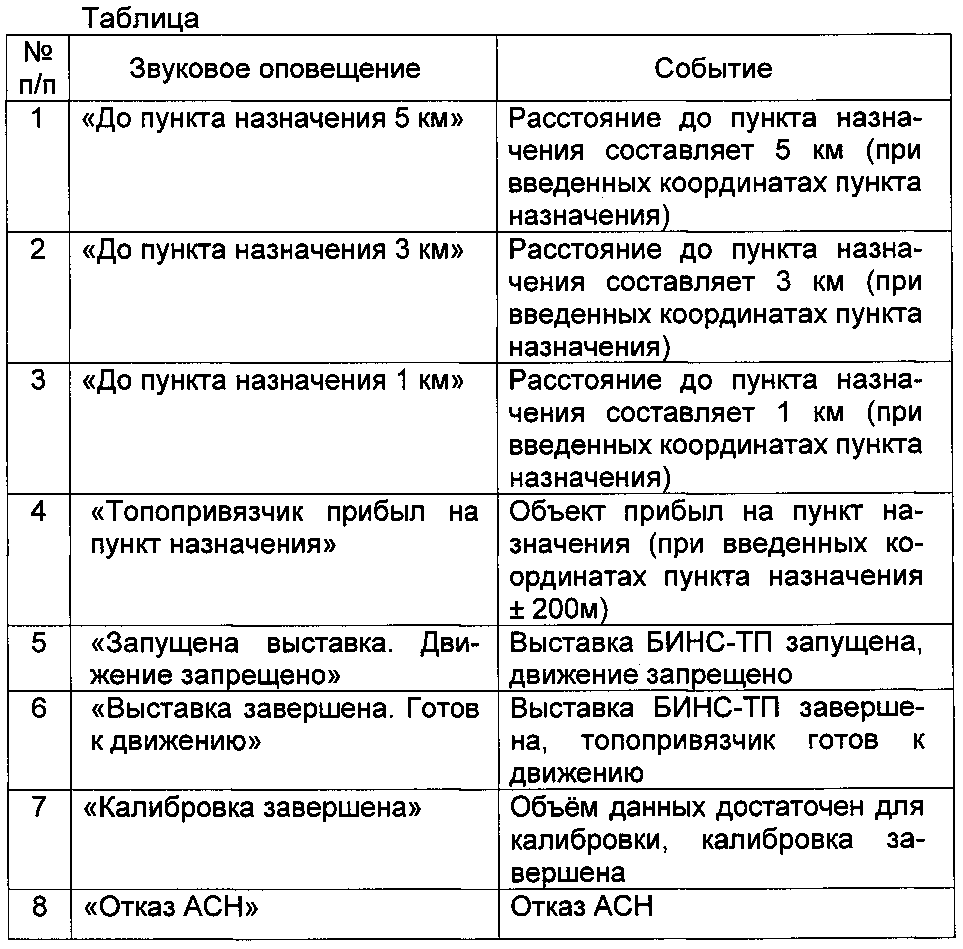
При включении ПАК происходит автоматический запуск программного обеспечения и режима определения дирекционного угла, производится автоматическая загрузка ранее сохраненных координат в качестве начальных, выдается голосовое оповещение «Запущена выставка. Движение запрещено».
Выполнение движения топопривязчика может осуществляться при наличии оперативного сообщения «ГОТОВ» в разделе «Данные БИНС» рабочего окна 14 «Состояние», а также голосового оповещения «Выставка завершена. Готов к движению».
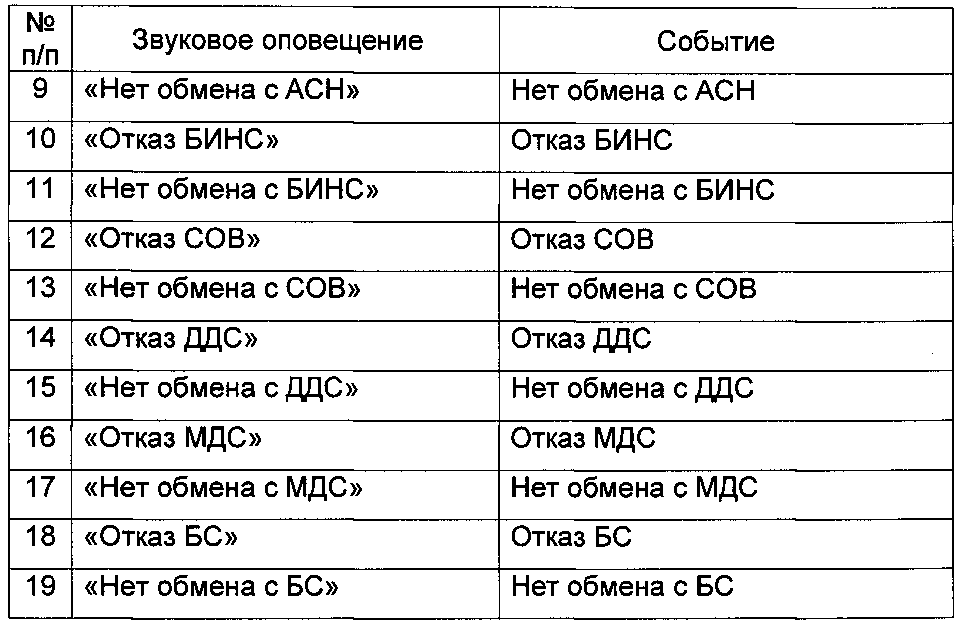
Для оповещения о возникновении какого-либо события имеется ряд звуковых оповещений. Перечень звуковых оповещений и событий, связанных с оповещениями, приведен в таблице.
При выборе пункта меню «Состояние» выводится рабочее окно 14, предназначенное для отображения информации о текущем состоянии систем и сборочных единиц, входящих в состав топопривязчика и взаимодействующих с ПАК, а также текущих значений входных и выходных данных.
В разделе «Данные БИНС» отображаются текущие данные объекта по данным БИНС-ТП 9:
- координаты X, Y, м;
- дирекционный угол продольной оси объекта α, д.у.;
- продольный β (тангаж) и поперечный ψ (крен) углы наклона, д.у.;
- текущий пройденный путь S, м;
- скорость V, км/с;
- состояние БИНС-ТП 9.
В разделе «Данные АСН» отображаются текущие данные объекта по данным АСН 10:
- координаты X, Y, м;
- высота H, м;
- среднеквадратическая ошибка (СКО), м;
- состояние АСН 10.
В разделе «Данные СОВ» отображаются текущие данные объекта по данным СОВ 11:
- высота объекта H, м;
- состояние СОВ 11.
В разделах «ДДС», «МДС», «БС», «АПД» отображаются текущие состояния ДДС 8, МДС 7, БС 3, АПД 13.
Также в окне «Состояние» отображаются:
- дальность до пункта назначения D, м;
- угол доворота топопривязчика на пункт назначения AПН, д.у.;
- время работы изделия с момента включения;
- текущие дата и время в формате;
- общее время наработки, ч;
Рабочее окно 18 задачи «Калибровка» состоит из:
- поля выбора источника информации о координатах начальной точки:
- «АСН» - в качестве координат начальной точки используются координаты, полученные с АСН 10;
- «Ручной ввод» - ввод значений XНТ, YНТ осуществляется оператором;
- полей ввода дирекционного угла, координат начальной точки и координат конечной точки;
- поля отображения обратного отсчета времени окончания определения дирекционного угла;
- индикатора прогресса калибровки, предназначенного для калибровки по данным с АСН 10.
Калибровка может быть проведена двумя способами:
а) первый способ - путем совершения марша топопривязчиком по маршруту с известными координатами начальной и конечной точек.
2) второй способ - по данным с АСН 10.
Калибровка первым способом:
а) топопривязчик устанавливается на начальной точке маршрута;
б) выбирается пункт «Калибровка», при этом выводится рабочее окно 18;
в) вводятся значения координат начальной точки;
г) нажимается кнопка «Принять начальные данные и начать калибровку». Отобразится обратный отсчет времени и оперативное сообщение «Запрет движения. Выставка БИНС», по окончании выставки БИНС-ТП 9 появится значение дирекционного угла и оперативное сообщение «Движение разрешено. Выставка завершена»;
д) начинается движение топопривязчика к конечной точке маршрута;
е) топопривязчик устанавливается на конечной точке, вводятся значения координат конечной точке и нажимается кнопка «Принять координаты пункта назначения и откалибровать по точкам»;
ж) контролируются значения полученных коэффициентов и поправок в появившемся окне 19 вкладки «Поправки».
Калибровка вторым способом:
а) топопривязчик устанавливается на начальной точке маршрута;
б) выбирается задача «Калибровка», при этом выводится рабочее окно 18;
г) выбирается источник информации о координатах начальной точки:
1) «АСН″» - в качестве координат начальной точки используются координаты, полученные с АСН 10;
2) «Ручной ввод» - ввод значений XНТ, YНТ осуществляется оператором;
д) нажимается кнопка «Принять начальные данные и начать калибровку». Отобразится обратный отсчет времени и оперативное сообщение «Запрет движения. Выставка БИНС», по окончании выставки БИНС-ТП 9 появится значение дирекционного угла и оперативное сообщение «Движение разрешено. Выставка завершена»;
е) начинается движение по маршруту. При достижении индикатором прогресса значения "100%" необходимо остановить топопривязчик. Через 10 с после полной остановки нажать клавишу «Принять результат калибровки по накопленным данным с АСН»;
ж) проконтролировать значения полученных коэффициентов и поправок в появившемся окне 19 вкладки «Поправки», нажать кнопку «Сохранить изменения».
Вкладка «Поправки» предназначена для контроля и изменения значений коэффициентов МДС 7 и ДДС 8, угловых поправок (поправок в углы) МДС и ДДС, характеризующих проекции динамических осей объекта относительно БИНС-ТП 9, а также для контроля и изменения значений поправок для определения крена и тангажа, поправки для работы с визиром и поправки на местное время.
При необходимости значения поправок корректируются
Задача «Определение поправки с визира» предназначена для определения поправки для работы с визиром. В окне 15 вводится количество (не менее четырех) замеров данных для определения поправки и нажимается кнопка «Начать». В окне 16 вводится дирекционный угол ориентированного направления αОР, д.у. (значение из каталога) и угол ориентированного направления β, д.у., определенный с помощью визира, нажимается кнопка «Выставка», начинается обратный отсчет времени, по истечении которого отобразится дирекционный угол, определенный с помощью БИНС-ТП 9 αБИНС, д.у. Нажимается кнопка «Расчет», на экране появятся значения дирекционного угла линии визирования αВИЗИР, д.у. и поправки для работы с визиром ΔAВ.
Нажимается кнопка «Следующий замер», повторяется описанное выше для других ориентированных направлений. При нажатии кнопки «Предыдущий» происходит возврат в предыдущее окно для возможности проверки правильности ввода данных и, при необходимости, их коррекции с проведением повторного замера.
Для вычисления поправки нажимается кнопка «Завершить», на экране появится значение ΔAВСР, вычисленное как среднее по результатам всех замеров. Для установки определенной ΔAВСР в качестве формулярного значения нажимается кнопка «Установить поправку», автоматически отобразится рабочее окно 19 вкладки «Поправки» с сохраненным значением ΔAВСР.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании программно-аппаратного комплекса топопривязчика, обеспечивающего прием и обработку информации, поступающей от соответствующих устройств топопривязчика, высокое качество проведения автоматизированного определения и контроля работоспособности и калибровки его приборов и систем, дополнительные возможности по концентрации внимания экипажа.
Программно-аппаратный комплекс топопривязчика, содержащий бортовую цифровую вычислительную машину, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, программно-алгоритмические средства, блок согласования, периферийное устройство, отличающийся тем, что в качестве бортовой цифровой вычислительной машины используется моноблочный панельный компьютер, а в качестве периферийного устройства - моноблочный панельный монитор, программно-аппаратный комплекс оснащен системой автоматизированного встроенного контроля работоспособности систем и сборочных единиц, входящих в состав программно-аппаратного комплекса и топопривязчика, с возможностью отображения следующей информации о текущем состоянии систем и сборочных единиц на мониторе панельного компьютера в режиме «Состояние»: текущие данные топопривязчика и текущее состояние соответственно по данным бесплатформенной инерциальной навигационной системы, аппаратуры спутниковой навигации, системы определения высоты, текущее состояние датчика скорости доплеровского, механического датчика скорости, блока согласования и аппаратуры передачи данных, системой звукового оповещения о возникновении каких-либо событий, возникающих в самом комплексе или в системах, связанных с ним: голосовое подтверждение возникших оперативных сообщений о возникших неисправностях, о готовности топопривязчика к движению после запуска режима гирокомпасирования бесплатформенной инерциальной навигационной системы, рекомендуемой скорости движения и изменения направления движения, голосовое сообщение о местонахождении топопривязчика на маршруте, проложенном на цифровой карте местности, программно-алгоритмические средства выполнены с возможностью выполнения задачи по определению и контролю поправки для работы с установленным на топопривязчике визиром, которая вводится в панельный компьютер, значений коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок (поправок в углы) этих датчиков, характеризующих проекции динамических осей топопривязчика относительно бесплатформенной инерциальной системы, значений поправок для определения крена и тангажа, значений поправки на местное время.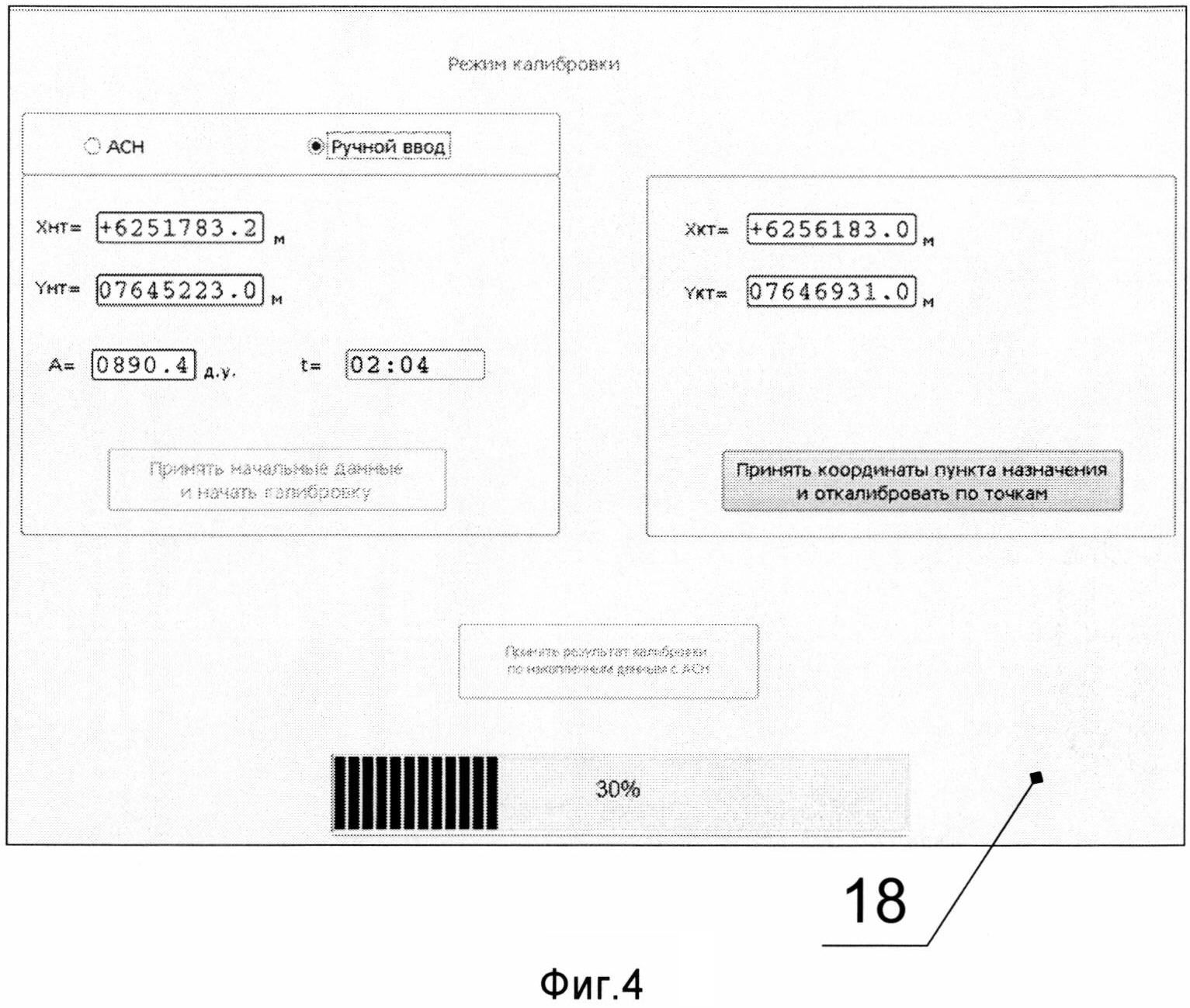
Модуль для установки и транспортирования выносного оборудования в кузове-фургоне специального транспортного средства
Дульное устройство
Стол поворотный
Способ изготовления инструмента из мартенситностареющих сталей
Стрелковое оружие
Замочный механизм огнестрельного оружия
Устройство предохранителя стрелкового оружия
Баллистическое оружие
Коробка для пулеметных лент
Храповый механизм свободного хода
Устройство для установки в нем пусковой трубы с ракетой индивидуального использования
Устройство для автоматического снятия передней крышки с пусковой трубы переносного зенитного ракетного комплекса (пзрк)
Струйно-вихревой топливовоздушный смеситель
Система спуска-стопорения оружейной установки
Автоматическое стрелковое оружие
Вихревой измельчитель материалов
Робототехнический комплекс для ведения разведки и огневой поддержки
Система связи и передачи данных топопривязчика
Огнестрельное оружие с подвижным стволом
Электрическое распределительное устройство

