Результат интеллектуальной деятельности: СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например летательного аппарата (ЛА).
Известен способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающийся во вращении по периодическому закону управления инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, коррекции параметров закона управления инерциальным измерительным блоком на основании функциональной зависимости между оптимальными параметрами закона управления и данными об изменении в процессе эксплуатации инструментальных погрешностей лазерных гироскопов [1].
Известно устройство, реализующее данный способ, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, шину навигационной информации, блок коррекции, в состав которого входят счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления, при этом входы блока определения погрешностей лазерных гироскопов соединены с выходами блока управления и отображения информации и счетчика времени, выход которого соединен с блоком выдачи сигнала коррекции; выход блока выдачи параметров закона управления соединен с входом блока электроники инерциального измерительного блока и интерфейсов, а входы - с выходами блока определения погрешностей лазерных гироскопов и блока выдачи сигнала коррекции [1].
Недостатком известных способа и устройства является отсутствие возможности компенсации погрешностей чувствительных элементов (гироскопов и акселерометров) инерциального измерительного блока за счет дополнительного инерциального измерительного блока.
Наиболее близкими к изобретению являются способ определения навигационных параметров летательного аппарата, заключающийся в измерении направления и величины векторов угловой скорости летательного аппарата относительно измерительной системы координат, определении текущей ориентации измерительной системы координат относительно навигационной системы координат, модуляции погрешностей составляющих векторов угловой скорости, определении текущих значений навигационных параметров по измеренным векторам ускорения и угловых скоростей и текущей ориентации измерительной системы координат, определении направления вектора погрешности текущей ориентации измерительной системы координат и модуляции этого вектора погрешности [2].
Наиболее близким устройством, реализующим данный способ, является устройство для определения навигационных параметров летательного аппарата, представляющее собой бесплатформенную инерциальную навигационную систему, содержащую блок датчиков линейных ускорений или линейных скоростей, блок датчиков угловых скоростей и вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, а также программными механизмами углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, при этом каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта, дополнительно содержит вторую аналогичную бесплатформенную инерциальную навигационную систему, образуя при этом инерциальную навигационную мультисистему, при этом два блока измерителей которой одновременно разворачиваются в пространстве в противоположных направлениях программными механизмами углового разворота (силовой частью датчиков углов) по сигналу, вырабатываемому устройством управления, состоящим из определителя разности модуля векторов ошибок угловых скоростей и формирователя управляющего сигнала [2].
Недостатки известных способа и устройства - компенсация погрешностей только гироскопов и отсутствие возможности компенсации погрешностей акселерометров.
Технической задачей изобретения является повышение точности определения пилотажных и навигационных параметров полета летательного аппарата путем компенсации погрешностей как гироскопов, так и акселерометров за счет дополнительных гироскопов и акселерометров. Компенсация погрешностей достигается за счет поворота векторов погрешностей акселерометров и гироскопов дополнительных блоков в противоположные направления погрешностям акселерометров и гироскопов основных блоков. Векторы погрешностей противоположны, в случае если разность показаний чувствительных элементов, приведенных к единой системе координат, максимальна.
Технический результат изобретения достигается тем, что в способе инерциальной навигации, заключающемся в измерении угловой скорости и ускорения летательного аппарата, определении текущей ориентации измерительной системы координат относительно навигационной системы координат, компенсации погрешностей измерителей угловой скорости первого блока измерителей угловой скорости за счет погрешностей измерителей угловой скорости второго блока измерителей угловой скорости путем разворота блоков до достижения максимума разности показаний измерителей угловой скорости, приведенных к единой системе координат, определении текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей и текущей ориентации измерительной системы координат, дополнительно осуществляют компенсацию погрешностей акселерометров первого блока акселерометров за счет погрешностей акселерометров второго блока акселерометров путем разворота блоков до достижения максимума разности показаний акселерометров, приведенных к единой системе координат.
В устройство для инерциальной навигации, включающее первый и второй навигационные вычислители, первое и второе суммирующие устройства, первое и второе множительные устройства, вычислитель разности сигналов гироскопов, первый формирователь управляющих сигналов, первое поворотное устройство, первый, второй и третий акселерометры, первый, второй и третий измерители угловой скорости, первый, второй и третий датчики угла, четвертый, пятый и шестой акселерометры, четвертый, пятый и шестой измерители угловой скорости, четвертый, пятый и шестой датчики угла, выходы первого, второго и третьего акселерометров соединены с первым, вторым и третьим входами первого навигационного вычислителя, выходы четвертого, пятого и шестого акселерометров соединены с первым, вторым и третьим входами второго навигационного вычислителя, выходы первого, второго и третьего датчиков угла соединены с четвертым, пятым и шестым входами первого навигационного вычислителя, выходы четвертого, пятого и шестого датчиков угла соединены с четвертым, пятым и шестым входами второго навигационного вычислителя, выходы первого, второго и третьего измерителей угловой скорости соединены с седьмым, восьмым и девятым входами первого навигационного вычислителя, выходы четвертого, пятого и шестого измерителей угловой скорости соединены с седьмым, восьмым и девятым входами второго навигационного вычислителя, первый и второй входы первого суммирующего устройства соединены с первыми выходами первого и второго навигационных вычислителей, а выход через первое множительное устройство соединен с первым выходом устройства, первый и второй входы второго суммирующего устройства соединены со вторыми выходами первого и второго навигационных вычислителей, а выход через второе множительное устройство соединен со вторым выходом устройства, первый, второй и третий измерители угловой скорости соединены с первым, вторым и третьим входами вычислителя разности сигналов гироскопов, четвертый, пятый и шестой измерители угловой скорости соединены с четвертым, пятым и шестым входами вычислителя разности сигналов гироскопов, выход которого через первый формирователь управляющих сигналов поступает на вход первого и второго поворотных устройств, первое поворотное устройство осуществляет поворот первого блока измерителей угловой скорости с расположенными на нем первым, вторым и третьим измерителями угловой скорости относительно корпуса летательного аппарата, второе поворотное устройство осуществляет поворот второго блока измерителей угловой скорости с расположенными на нем четвертым, пятым и шестым измерителями угловой скорости относительно корпуса летательного аппарата, дополнительно введены вычислитель разности сигналов акселерометров, второй формирователь управляющих сигналов, третье и четвертое поворотные устройства, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый датчики угла, причем первый, второй, третий акселерометры и седьмой, восьмой, девятый датчики угла объедены в первый блок акселерометров, первый, второй, третий измерители угловой скорости и первый, второй, третий датчики угла объединены в первый блок измерителей угловой скорости, четвертый, пятый, шестой акселерометры и десятый, одиннадцатый, двенадцатый датчики угла объединены во второй блок акселерометров, четвертый, пятый, шестой измерители угловой скорости и четвертый, пятый, шестой датчики угла объединены во второй блок измерителей угловой скорости, выходы первого, второго и третьего датчиков угла соединены с седьмым, восьмым и девятым входами вычислителя разности сигналов гироскопов, выходы четвертого, пятого и шестого датчиков угла соединены с десятым, одиннадцатым и двенадцатым входами вычислителя разности сигналов гироскопов, выходы седьмого, восьмого и девятого датчиков угла соединены с первым, вторым и третьим входами вычислителя разности сигналов акселерометров и десятым, одиннадцатым и двенадцатым входами первого навигационного вычислителя, выходы первого, второго и третьего акселерометров соединены с четвертым, пятым и шестым входами вычислителя разности сигналов акселерометров, выходы десятого, одиннадцатого и двенадцатого датчиков угла соединены с десятым, одиннадцатым и двенадцатым входами второго навигационного вычислителя и с седьмым, восьмым и девятым входами вычислителя разности сигналов акселерометров, выходы четвертого, пятого и шестого акселерометров соединены с вычислителем разности сигналов акселерометров, выход которого через второй формирователь управляющих сигналов соединен с входами третьего и четвертого поворотных устройств, третье поворотное устройство осуществляет поворот первого блока акселерометров с расположенными на нем первым, вторым и третьим акселерометрами относительно корпуса летательного аппарата, четвертое поворотное устройство осуществляет поворот второго блока акселерометров с расположенными на нем четвертым, пятым и шестым акселерометрами относительно корпуса летательного аппарата.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
осуществляют компенсацию погрешностей акселерометров первого блока акселерометров за счет погрешностей акселерометров второго блока акселерометров путем разворота блоков до достижения максимума разности показаний акселерометров, приведенных к единой системе координат;
по устройству - наличие в схеме устройства вычислителя разности сигналов акселерометров, формирователя управляющих сигналов, двух поворотных устройств, восьми датчиков угла;
новые связи между известными и новыми признаками.
Применение всех новых признаков позволяет повысить точность определения пилотажно-навигационных параметров летательного аппарата путем компенсации погрешностей акселерометров первого блока акселерометров за счет погрешностей акселерометров второго блока акселерометров.
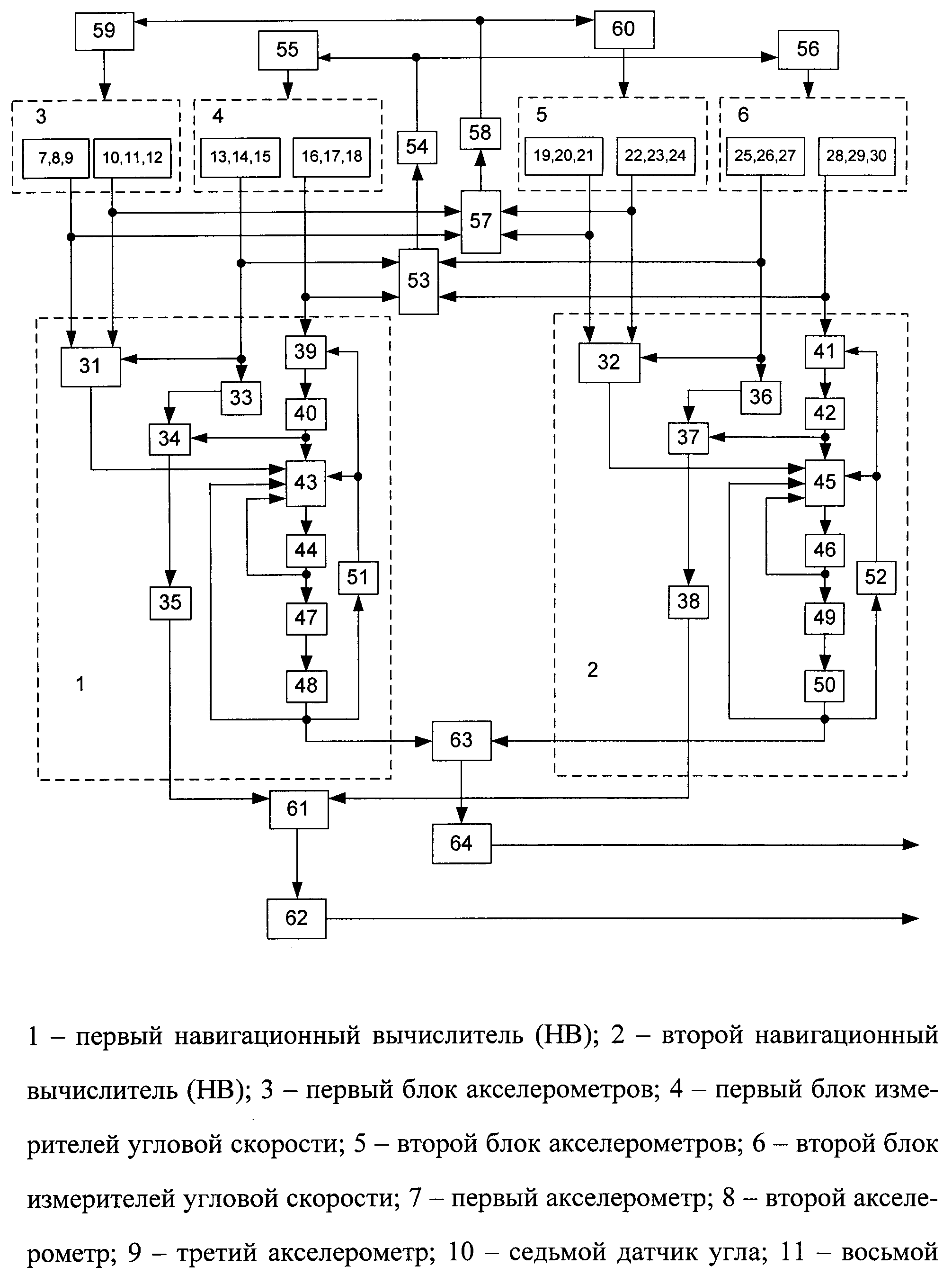
На чертеже изображена блок-схема устройства для инерциальной навигации.
В состав устройства входят два навигационных вычислителя 1 и 2, два блока акселерометров 3 и 5, два блока измерителей угловой скорости 4 и 6, акселерометры 7-9 и 25-27, датчики угла 10-15 и 22-27, измерители угловой скорости 16-18 и 28-30, вычислители матрицы направляющих косинусов 31-34, 36-37, 39 и 41, вычислители параметров ориентации 35 и 38, интегрирующие вычислители 40, 42, 44, 46, 48 и 50, вычислители скоростей 43 и 45, вычислители координат 47 и 49, вычислители угловых скоростей 51 и 52, вычислитель разности сигналов гироскопов 53, формирователи управляющих сигналов 54 и 58, поворотные устройства 55, 56, 59 и 60, вычислитель разности сигналов акселерометров 57, суммирующие устройства 61 и 63, множительные устройства.
Первый навигационный вычислитель 1 состоит из первого вычислителя матрицы направляющих косинусов 31, второго вычислителя матрицы направляющих косинусов 33, третьего вычислителя матрицы направляющих косинусов 34, вычислителя параметров ориентации 35, четвертого вычислителя матрицы направляющих косинусов 39, первого интегрирующего вычислителя 40, вычислителя скоростей 43, второго интегрирующего вычислителя 44, вычислителя координат 47, третьего интегрирующего вычислителя 48, вычислителя угловых скоростей 51.
Второй навигационный вычислитель 2 состоит из первого вычислителя матрицы направляющих косинусов 32, второго вычислителя матрицы направляющих косинусов 36, третьего вычислителя матрицы направляющих косинусов 37, вычислителя параметров ориентации 38, четвертого вычислителя матрицы направляющих косинусов 41, первого интегрирующего вычислителя 42, вычислителя скоростей 45, второго интегрирующего вычислителя 46, вычислителя координат 49, третьего интегрирующего вычислителя 50, вычислителя угловых скоростей 52.
Первый и второй навигационные вычислители 1 и 2 предназначены для вычисления пилотажно-навигационных параметров летательных аппаратов на основании показаний акселерометров и гироскопов.
Первый блок 4 измерителей угловой скорости состоит из первого, второго и третьего измерителей угловой скорости 16, 17, 18 и закреплен на первом поворотном устройстве 55. На осях поворотного устройства расположены датчики 13, 14 и 15 угла, позволяющие измерить углы Эйлера-Крылова [3], определяющие ориентацию блока 4 измерителей угловой скорости относительно связанной с летательным аппаратом системы координат.
Первый блок 3 акселерометров состоит из первого, второго и третьего акселерометров 7, 8, 9 и закреплен на третьем поворотном устройстве 59 с датчиками 7, 8, 9 на осях вращения.
Второй блок 5 акселерометров состоит из четвертого, пятого и шестого акселерометров 19, 20, 21 и закреплен на четвертом поворотном устройстве 60 с датчиками 22, 23, 24 на осях вращения.
Второй блок 6 измерителей угловой скорости состоит из четвертого, пятого и шестого измерителей угловой скорости 28, 29, 30 и закреплен на втором поворотном устройстве 56 с датчиками 25, 26, 27 на осях вращения.
Измерители угловой скорости и акселерометры каждого из блоков 3, 4, 5 и 6 представляют собой ортогональные тройки измерителей.
Поворотные устройства 55, 56, 59 и 60 известны [4] и представляют собой карданный узел.
Выходы первого множительного устройства 62 несут информацию об углах ориентации летательного аппарата - тангаже ϑ, крене γ и курсе ψ.
Выходы второго множительного устройства 64 несут информацию о широте φ, долготе λ, высоте H, азимутальном угле ε, земных скоростях VX, VY и VZ.
Устройство работает следующим образом.
Измерители угловой скорости и акселерометры каждого из блоков 4, 6 и 3, 5 определяют соответствующие параметры, а именно угловые скорости и ускорения, с ошибками. Ошибки ортогональной тройки чувствительных элементов определяют векторы погрешностей блоков чувствительных элементов - векторы дрейфа блоков измерителей угловой скорости 4 и 6, а также векторы погрешностей акселерометров блоков акселерометров 3 и 5.
Первый и второй блоки 4 и 6 измерителей угловой скорости разворачиваются относительно друг друга таким образом, чтобы векторы дрейфа блоков были противоположны. Показателем того, что векторы дрейфа блоков измерителей угловой скорости противоположны, является то, что разность векторов показаний измерителей угловой скорости, приведенных к единой системе координат, максимальна.
Приведение показаний измерителей угловой скорости блоков 4 и 6 к единой системе координат, а также вычисление разностного сигнала осуществляется в вычислителе 53 разности сигналов гироскопов. В качестве единой системы координат, в которой определяются разностные сигналы, определена связанная с ЛА система координат.
Алгоритм работы вычислителя 53 разности сигналов гироскопов определяется следующими соотношениями.
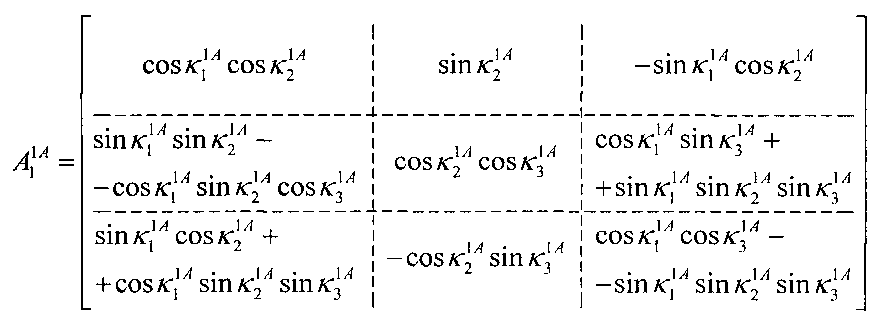
По сигналам, поступающим с датчиков углов 13, 14 и 15, вычисляются элементы матрицы направляющих косинусов (МНК) перехода из системы координат, связанной с первым блоком 4 измерителей угловой скорости, к связанной с ЛА системе координат:
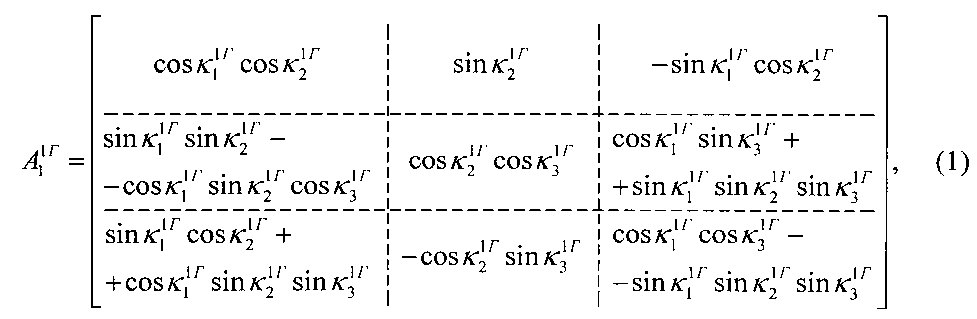
где  ,
,  ,
,  - углы поворота первого блока 4 измерителей угловой скорости относительно корпуса ЛА.
- углы поворота первого блока 4 измерителей угловой скорости относительно корпуса ЛА.
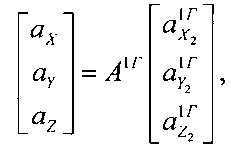
Пересчет показаний измерителей 16, 17 и 18 угловой скорости блока 4 к связанной с ЛА системе координат осуществляется на основании соотношения:

где  ,
,  ,
,  - показания соответственно первого, второго и третьего измерителей 16, 17 и 18 угловой скорости.
- показания соответственно первого, второго и третьего измерителей 16, 17 и 18 угловой скорости.
По сигналам, поступающим с датчиков углов 25, 26 и 27, вычисляются элементы матрицы направляющих косинусов (МНК) перехода из системы координат, связанной со вторым блоком 6 измерителей угловой скорости, к связанной с ЛА системе координат:
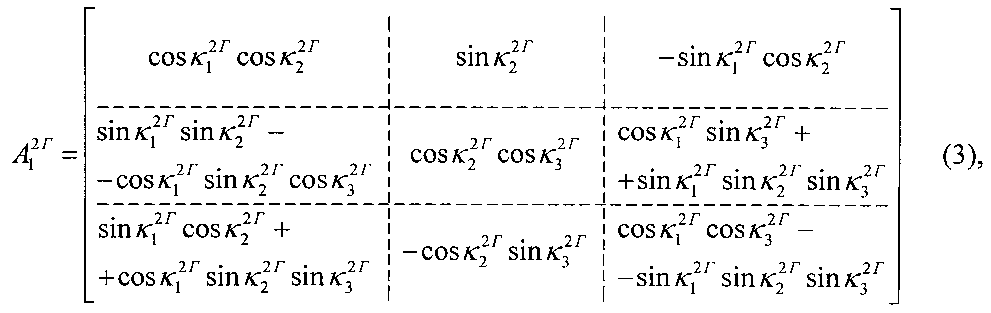
где  ,
,  ,
,  - углы поворота второго блока 6 измерителей угловой скорости относительно корпуса ЛА.
- углы поворота второго блока 6 измерителей угловой скорости относительно корпуса ЛА.
Пересчет показаний измерителей 28, 29 и 30 угловой скорости блока 6 к связанной с ЛА системе координат осуществляется на основании соотношения:
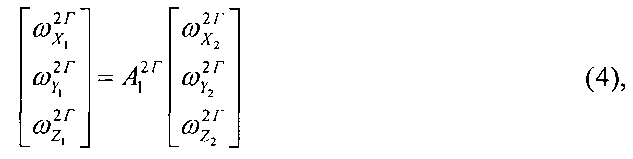
где  ,
,  ,
,  - показания соответственно первого, второго и третьего измерителей 16, 17 и 18 угловой скорости.
- показания соответственно первого, второго и третьего измерителей 16, 17 и 18 угловой скорости.
На основании разности показаний измерителей угловой скорости, приведенных к единой системе координат
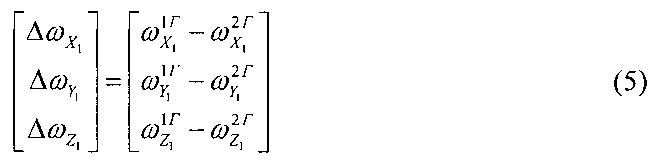
вычисляется длина данного вектора

Величина этого вектора и является показателем, характеризующим направление векторов дрейфов первого и второго блоков 4 и 6 измерителей угловой скорости.
Задача первого формирователя 54 управляющих сигналов - максимизация показателя (6):
ΔГ→max.
Первый формирователь 54 управляющих сигналов выдает сигналы управления на первое поворотное устройство 55 и второе поворотное устройство 56. Первое и второе поворотные устройства 55 и 56 осуществляют вращение соответственно первого и второго блоков 4 и 6 измерителей угловой скорости. Вращение блоков 4 и 6 осуществляется на дискретные углы последовательно вокруг трех осей поворотных устройств. Съем показаний с измерителей угловой скорости осуществляется при неподвижном относительно корпуса ЛА положении блоков измерителей угловой скорости. На основании этих показаний производится вычисление длины вектора ΔГ разности показаний измерителей угловой скорости, приведенных к единой системе координат, при различных дискретных углах поворотных устройств. Из данного массива значений максимальное определяет ориентацию блоков измерителей угловой скорости, при которых их векторы погрешностей противоположны. При такой ориентации блоков 4 и 6 погрешность измерителей угловой скорости первого блока 4 измерителей угловой скорости компенсируется за счет погрешностей измерителей угловой скорости второго блока 6 измерителей угловой скорости.
Аналогично осуществляется определение ориентации и установка блоков 3 и 5 акселерометров для компенсации погрешностей первого блока 3 акселерометров за счет погрешностей второго блока 5 акселерометров.
По сигналам, поступающим с первого, второго и третьего измерителей 16, 17 и 18 угловой скорости первого блока 4 измерителей угловой скорости, в четвертом вычислителе 39 матрицы направляющих косинусов первого НВ и первом интегрирующем вычислителе 40 первого НВ вычисляется МНК перехода из системы координат, связанной с первым блоком 4 измерителей угловой скорости, к навигационной системе координат:

где А1Г - МНК перехода из системы координат, связанной с первым блоком 4 измерителей угловой скорости, к навигационной системе координат;
 - кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной с первым блоком 4 измерителей угловой скорости, на собственные оси (показания измерителей 16, 17 и 18 угловой скорости);
- кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной с первым блоком 4 измерителей угловой скорости, на собственные оси (показания измерителей 16, 17 и 18 угловой скорости);
 - кососимметрическая матрица, составленная из проекций абсолютной угловой скорости навигационной системы координат на собственные оси.
- кососимметрическая матрица, составленная из проекций абсолютной угловой скорости навигационной системы координат на собственные оси.
Соотношение (7) представляет собой обобщенное уравнение Пуассона и определяет ориентацию одной подвижной системы координат относительно другой подвижной системы координат [5].
Аналогично в вычислителях 41 и 42 второго НВ 2 определяется МНК перехода из системы координат, связанной со вторым блоком 6 измерителей угловой скорости, к навигационной системе координат:

где А2Г - МНК перехода из системы координат, связанной со вторым блоком 6 измерителей угловой скорости, к навигационной системе координат;
 - кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной со вторым блоком 6 измерителей угловой скорости, на собственные оси (показания измерителей 28, 29 и 30 угловой скорости).
- кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной со вторым блоком 6 измерителей угловой скорости, на собственные оси (показания измерителей 28, 29 и 30 угловой скорости).
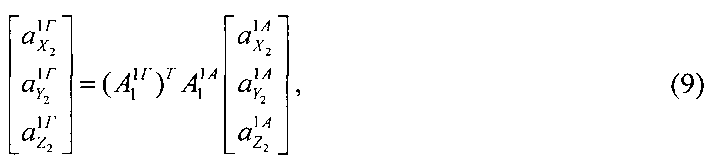
По сигналам седьмого, восьмого и девятого датчиков угла 10, 11 и 12, а также первого, второго и третьего датчиков угла 13, 14 и 15 осуществляется пересчет показаний первого, второго и третьего акселерометров 7, 8 и 9 к системе координат связанной с первым блоком 4 измерителей угловой скорости:
где  ,
,  ,
,  - показания соответственно первого, второго и третьего акселерометров 7, 8 и 9;
- показания соответственно первого, второго и третьего акселерометров 7, 8 и 9;
 - МНК перехода из системы координат, связанной с первым блоком 3 акселерометров, к системе координат, связанной с ЛА;
- МНК перехода из системы координат, связанной с первым блоком 3 акселерометров, к системе координат, связанной с ЛА;
 ,
,  ,
,  - углы поворота первого блока 3 акселерометров относительно корпуса ЛА (показания седьмого, восьмого и девятого датчиков угла 10, 11 и 12);
- углы поворота первого блока 3 акселерометров относительно корпуса ЛА (показания седьмого, восьмого и девятого датчиков угла 10, 11 и 12);
Т - знак транспонирования матрицы.
Аналогично во втором навигационном вычислителе 2 пересчитываются показания акселерометров 19, 20 и 21 к системе координат, связанной со вторым блоком 6 измерителей угловой скорости.
По сигналам, поступающим с вычислителя 39 матрицы направляющих косинусов и интегрирующего вычислителя 40, а также первого вычислителя 31 матрицы направляющих косинусов первого НВ, в вычислителе 43 скоростей и втором интегрирующем вычислителе 44 первого НВ определяются составляющие земной скорости:


где ΩX, ΩY, ΩZ - составляющие относительной угловой скорости навигационной системы координат;
uX,uZ,uY - проекции угловой скорости Земли на оси навигационной системы координат;
Hб - барометрическая высота;
a - большая полуось земного эллипсоида;
ge - ускорение силы тяжести на экваторе;
q2 - коэффициент обратной связи, обеспечивающий устойчивость канала вертикальной скорости по ошибкам;
k - коэффициент, характеризующий изменение силы тяжести в зависимости от широты.
Аналогично составляющие земной скорости вычисляются во втором навигационном вычислителе 2.
По сигналам, поступающим с вычислителя скоростей 43 первого НВ через второй интегрирующий вычислитель 44 первого НВ в вычислителе координат 47 первого НВ, определяются географические координаты местоположения ЛА:

где φ, λ - соответственно географическая широта и долгота местоположения ЛА;
ε - азимутальный угол;
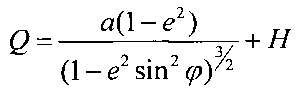 - радиус кривизны сечения эллипсоида меридиональной плоскостью;
- радиус кривизны сечения эллипсоида меридиональной плоскостью;
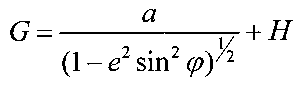 - радиус кривизны сечения эллипсоида плоскостью, приходящей через геодезическую вертикаль места и ортогональную меридиану (радиус кривизны первого вертикала).
- радиус кривизны сечения эллипсоида плоскостью, приходящей через геодезическую вертикаль места и ортогональную меридиану (радиус кривизны первого вертикала).
Аналогично географические координаты местоположения ЛА вычисляются во втором навигационном вычислителе 2.
В вычислителе 51 угловых скоростей первого НВ определяются относительные, переносные и абсолютные угловые скорости навигационной системы координат:

Ориентация ЛА определяется на основании информации о:
а) ориентации первого блока 4 измерителей угловых скоростей относительно навигационной системы координат;
б) ориентации первого блока 4 измерителей угловых скоростей относительно корпуса ЛА.
Вычисления осуществляются в блоках 34 и 35.
Для определения углов ориентации ЛА необходимо определить МНК перехода от связанной с ЛА системы координат к навигационной системе координат:

По элементам матрицы D вычисляются углы ориентации ЛА - курс ψ, крен γ, тангаж υ:
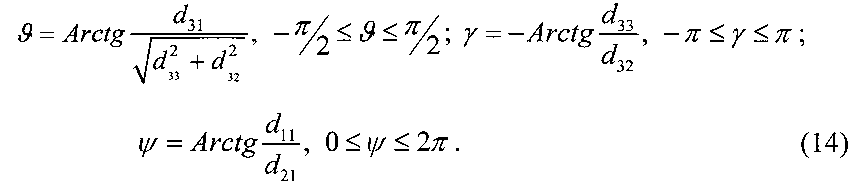
Аналогично углы ориентации ЛА вычисляются во втором навигационном вычислителе 2.
На основании информации об ориентации ЛА, полученной в первом и втором навигационных вычислителях 1 и 2, в первом суммирующем устройстве 61 и первом множительном устройстве 62 вычисляется ориентация ЛА путем осреднения вычисленных значений.
На основании информации о координатах и скоростях ЛА, полученной в первом и втором навигационных вычислителях 1 и 2, во втором суммирующем устройстве 63 и втором множительном устройстве 64 вычисляются координаты и скорости ЛА путем осреднения вычисленных значений.
Пилотажно-навигационная информация с выходов устройства поступает в системы ЛА.
Источники информации
1. Патент РФ №2362977 С1, кл. G01C 21/10. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления. 27.07.2009 (аналог).
2. Патент РФ №2313067 С2, кл. G01C 21/12. Способ определения навигационных параметров летательного аппарата и устройство для его осуществления. 27.12.2005 (прототип).
3. Шепеть И.П., Онуфриенко В.В., Слесаренок С.В. Методическое обеспечение управляемых навигационных систем. (Монография). - Воронеж: Военный учебно-научный центр Военно-Воздушных Сил «Военно-Воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина», 2012. - с. 54-60.
4. Гироскопические системы. Гироскопические приборы и системы / Под ред. Д.С. Пельпора. - М.: Высш. шк., 1988. с. 367.
5. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982.
Устройство для решения дифференциальных уравнений
Микроконтроллерный измерительный преобразователь емкости и сопротивления в двоичный код
Гелиосистема
Способ компенсации погрешностей инерциальных измерительных элементов и устройство для его осуществления
Устройство для интегрирования дифференциальных уравнений
Способ автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления
Система солнечного теплоснабжения
Устройство для решения дифференциальных уравнений
Микроконтроллерный измерительный преобразователь емкости и сопротивления в двоичный код
Гелиосистема
Способ компенсации погрешностей инерциальных измерительных элементов и устройство для его осуществления
Устройство для интегрирования дифференциальных уравнений
Способ автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления
Система солнечного теплоснабжения

