Результат интеллектуальной деятельности: СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к подъемно-транспортному оборудованию, в частности, может использоваться для производства монтажных и погрузочно-разгрузочных работ, в том числе на объектах, находящихся в труднодоступных местах.
Уровень техники
Известен манипулятор для проведения грузовых работ по патенту №2049717 кл. B66С 23/06, содержащий опорно-поворотное устройство, секционную грузозахватную стрелу. Стрела включает основную секцию с расположенными под углом друг к другу силовыми цилиндрами. Штоки силовых цилиндров посредством опорного шарнира соединены между собой и с основной секцией стрелы. Манипулятор содержит также дополнительный силовой цилиндр и поворотную стойку с парой проушин на каждом ее конце, один из которых соединен с основной секцией стрелы. Противоположная пара проушин поворотной стойки шарнирно закреплена на опорно-поворотном устройстве, на котором на общей оси с проушинами установлен и один конец дополнительного силового цилиндра. Противоположный конец дополнительного силового цилиндра соединен с основной секцией стрелы, при этом центр опорного шарнира двух силовых цилиндров размещен на общей оси с проушинами поворотной стойки, соединенными с основной секцией стрелы.
Однако данное устройство обладает рядом недостатков, а именно:
- сложность обеспечения синхронного, одновременного движения двух силовых цилиндров с общим шарниром, что ведет к неконтролируемому рассогласованию скоростей движения, а следовательно, к подъему стрелы и одновременному повороту в неизвестную сторону, т.е. создается неопределенность траектории движения груза;
- имеет место ограниченный угол поворота при сложной траектории движения груза вверх (вниз) с одновременным поворотом.
Наиболее близким к предлагаемому техническому решению является грузоподъемный кран по а.с. №1039860, кл. B66С 23/36, содержащий раму с поворотной платформой и телескопическую стрелу, соединенную с поворотной платформой посредством гидроцилиндров. Гидроцилиндры шарнирно соединены с поворотной платформой, на которой жестко закреплены вертикальные направляющие, в которых подвижно установлен ползун, связанный шарнирно через тягу со стрелой.
Однако данный грузоподъемный кран не позволяет увеличить жесткость системы и исключить изгибающие моменты на гидроцилиндрах, т.к. кинематическая схема данного грузоподъемного крана содержит шесть звеньев, из которых одно звено неподвижное, а пять подвижных, и семь кинематических пар. Из семи кинематических пар одна пара перемещения с одной степенью свободы и шесть пар вращения с одной степенью свободы. По формуле Чебышева (Артоболевский. «Теория механизмов и машин». М.: Наука. Гл. ред. физ. мат. лит. 1988, - 640 с.) число степеней свободы кинематической цепи равно единице.
W=3n-2P5-P4=3×5-7×1-0=1, где
n - число подвижных звеньев,
P5 - число кинематических пар с одной степенью свободы,
Р4 - число кинематических пар с двумя степенями свободы.
При наличии у кинематической цепи одной степени свободы, кинематическая цепь будет являться механизмом, следовательно, известный грузоподъемный кран по а.с. №1039860, кл. B66С 23/36 не может удовлетворять таким требованиям, как неизменяемость взаимного положения звеньев в пространстве при действии массовых нагрузок в звеньях, а также совместного действия массовых нагрузок и груза при статическом нагружении грузоподъемного крана, т.к. в этом случае необходима ферма со степенью свободы, равной нулю.
Кроме того, в данном грузоподъемном кране все рабочие звенья находятся в одной плоскости, что приводит к малой жесткости в поперечном направлении и раскачке поворотной стрелы с грузом, что не позволяет данному грузоподъемному крану расширить функциональные возможности и производить погрузочно-разгрузочные работы в котловане, поднимать груз на максимальную высоту или снимать с максимальной высоты.
Раскрытие изобретения
Основной задачей, на решение которой направлено настоящее изобретение, является повышение надежности в работе путем увеличения жесткости системы, исключения нештатного перемещения груза, расширение функциональных возможностей.
Решение перечисленных задач достигается за счет того, что стреловой грузоподъемный кран содержит платформу, установленную на шасси автомобиля, и соединенную с ней поворотную платформу, а также телескопическую стрелу. Телескопическая стрела состоит из секции и основания, которое шарнирно соединено соответственно с передним и задним гидроцилиндрами, нижние концы которых также шарнирно связаны с поворотной платформой.
Стреловой грузоподъемный кран снабжен подкосом, выполненным в виде трапеции, при этом узкий П-образный конец соединен с основанием телескопической стрелы шарнирами, соосно расположенными с шарниром переднего гидроцилиндра, а широкий П-образный конец подкоса присоединен к поворотной платформе шарнирами, соосно расположенными с шарниром заднего гидроцилиндра.
Предлагаемое изобретение позволяет решить основные задачи, на решение которых оно направлено, а именно, позволяет повысить надежность крана за счет обеспечения неизменности взаимного расположения звеньев в пространстве при действии массовых нагрузок в звеньях и на грузе при статическом нагружении, при этом обеспечивается увеличение жесткости системы и исключается возможность нештатного перемещения груза.
Краткое описание чертежей
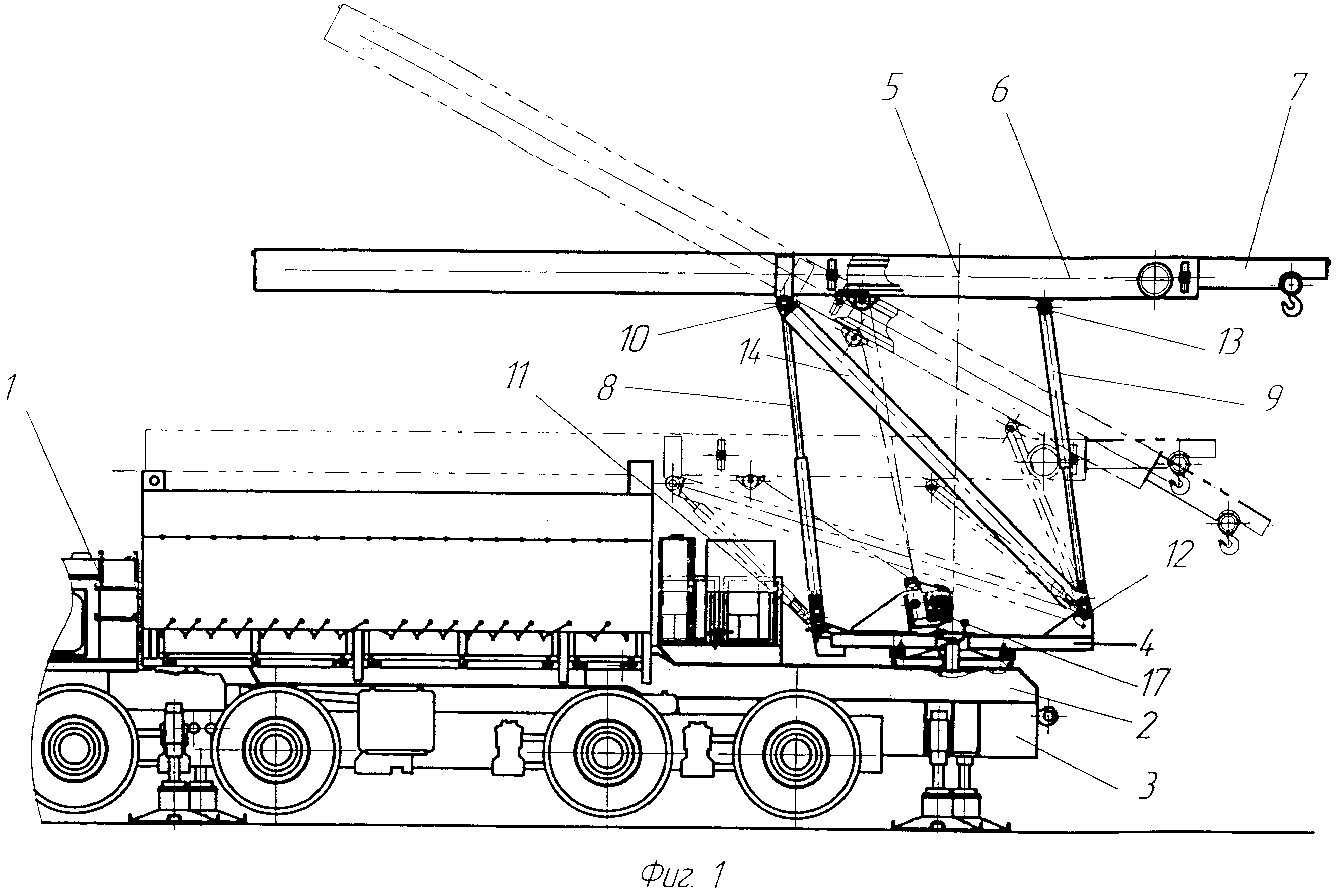
На фиг. 1 показан стреловой грузоподъемный кран.
На фиг. 2 дан вид сверху (стрела не показана).
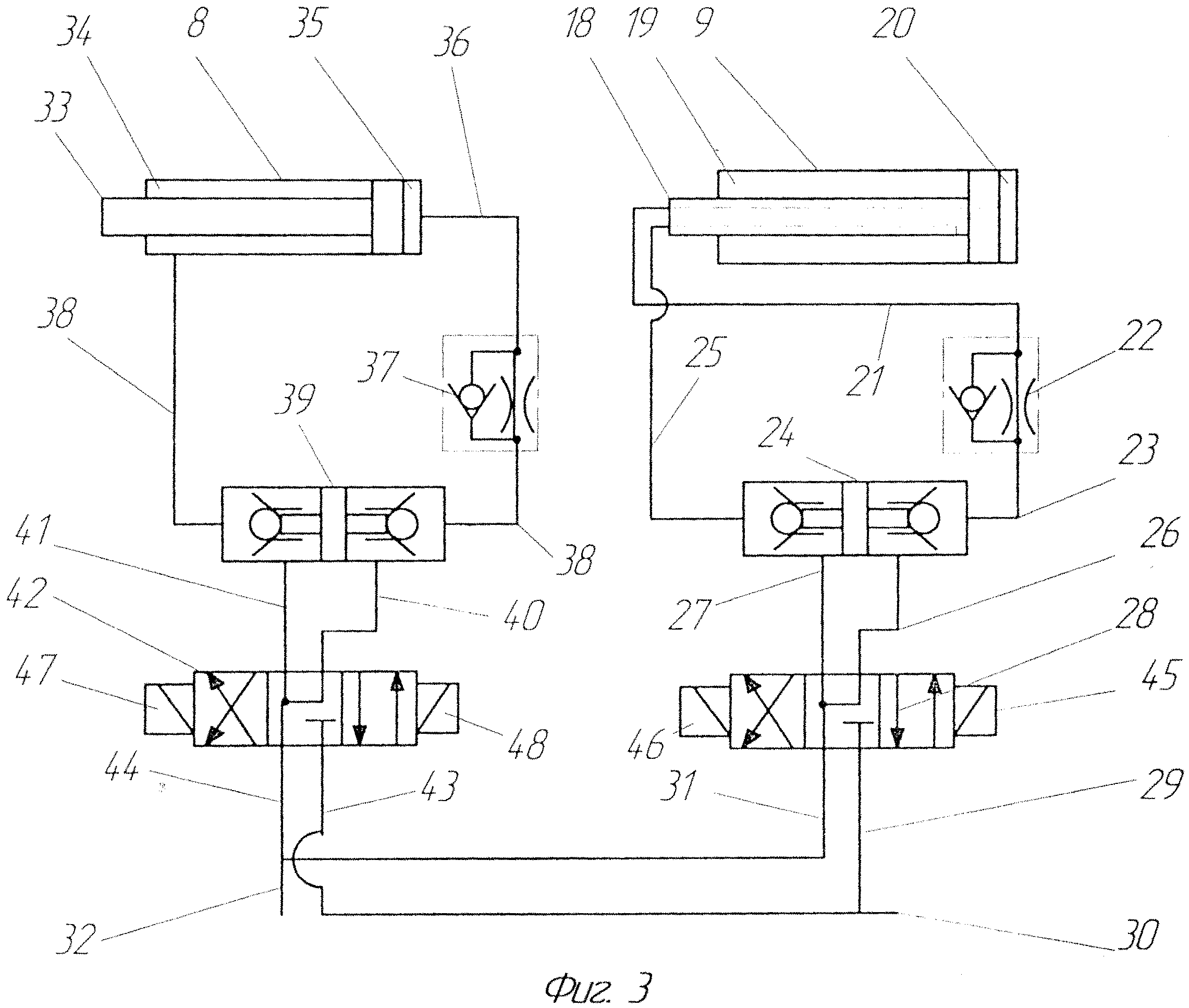
На фиг. 3 дана принципиальная гидравлическая схема управления гидроцилиндрами.
Осуществление изобретения
Стреловой грузоподъемный кран 1 имеет платформу 2, установленную на шасси автомобиля 3. Стреловой грузоподъемный кран 1 содержит поворотную платформу 4, закрепленную на платформе 2, и телескопическую стрелу 5, состоящую из основания 6 и секции 7. Основание 6 телескопической стрелы 5 связано с поворотной платформой 4 посредством переднего 8 и заднего 9 гидроцилиндров. Передний гидроцилиндр 8 связан с основанием 6 телескопической стрелы 5 с помощью шарнира 10. Другой конец переднего гидроцилиндра 8 закреплен с помощью шарнира 11 на поворотной платформе 4. Задний гидроцилиндр 9 с помощью шарнира 12 соединен с поворотной платформой 4, а другой конец заднего гидроцилиндра 9 соединен шарниром 13 с основанием 6 телескопической стрелы 5. Стреловой грузоподъемный кран 1 снабжен также выполненным в вице трапеции подкосом 14, узкий П-образный конец которого шарнирами 15 соединен с основанием 6 телескопической стрелы 5. Шарниры 15 расположены соосно с шарниром 10, на котором закреплен передний гидроцилиндр 8. При этом второй широкий П-образный конец подкоса 14 присоединен с помощью шарниров 16 к поворотной платформе 4. Шарниры 16 установлены соосно с шарниром 12 заднего гидроцилиндра 9. На платформе 4 установлена лебедка 17.
Задний гидроцилиндр 9 состоит из штока 18, штоковой полости 19, поршневой полости 20, которая гидролинией 21 через односторонний дроссель 22 и гидролинию 23 соединена с двухсторонним гидрозамком 24. Штоковая полость 19 через гидролинию 25 соединена с двухсторонним гидрозамком 24, который гидролиниями 26 и 27 соединен с трехпозиционным электрогидравлическим краном 28, связанным через гидролинию 29 с напорной гидролинией 30 и через гидролинию 31 со сливной гидролинией 32.
Передний гидроцилиндр 8 состоит из штока 33, штоковой полости 34, поршневой полости 35, которая гидролинией 36 через односторонний дроссель 37 и гидролинию 38 соединена с двухсторонним гидрозамком 39. Штоковая полость 34 через гидролинию 38 соединена с двухсторонним гидрозамком 39, связанным гидролиниями 40 и 41 с трехпозиционным электрогидравлическим краном 42, который через гидролинию 43 соединен с напорной гидролинией 30 и через гидролинию 44 со сливной гидролинией 32. Трехпозиционный электрогидравлический кран 28 содержит электромагниты 45 и 46, а трехпозиционный электрогидравлический кран 42 содержит электромагниты 47 и 48.
Стреловой грузоподъемный кран 1 работает следующим образом. После вывешивания его на домкратах и горизонтирования осуществляется развертывание крана из транспортного положения, показанного пунктиром на фиг. 1, путем полного выпуска штока переднего гидроцилиндра 8. Затем осуществляется полный выпуск штока заднего гидроцилиндра 9.
Выпуск штока 33 переднего гидроцилиндра 8 производится следующим образом: рабочая жидкость под давлением подается в напорные гидролинии 29, 30, 43 и поступает к трехпозиционным электрогидравлическим кранам 28, 42. Затем подается питание на электромагнит 48 трехпозиционного электрогидравлического крана 42, который срабатывает и рабочая жидкость через гидролинию 40, двухсторонний гидрозамок 39, гидролинию 38, односторонний дроссель 37, гидролинию 36 поступает в поршневую полость 35 переднего гидроцилиндра 8. Под давлением рабочей жидкости шток 33 перемещается влево, преодолевая нагрузку. Из штоковой полости 34 рабочая жидкость через гидролинию 38, двухсторонний гидрозамок 39, гидролинию 41, трехпозиционный электрогидравлический кран 42 поступает в сливные гидролинии 32, 44.
Уборка штока 33 переднего гидроцилиндра 8 производится следующим образом: подается рабочая жидкость под давлением в напорные гидролинии 29, 30, 43 и поступает к трехпозиционным электрогидравлическим кранам 28, 42. Затем подается питание на электромагнит 47 трехпозиционного электрогидравлического крана 42, который срабатывает и рабочая жидкость через гидролинию 41, двухсторонний гидрозамок 39, гидролинию 38, поступает в штоковую полость 34 переднего гидроцилиндра 8. Под давлением рабочей жидкости шток 33 перемещается вправо, преодолевая нагрузку. Из поршневой полости 35 рабочая жидкость через гидролинию 36, односторонний дроссель 37, двухсторонний гидрозамок 39, гидролинию 40, трехпозиционный электрогидравлический кран 42 поступает в сливные гидролинии 32, 44.
Аналогичным образом функционирует привод заднего гидроцилиндра 9. В этом положении телескопическая стрела 5 занимает горизонтальное положение и кран готов к выполнению погрузочно-разгрузочных и монтажных работ на требуемой высоте телескопической стрелы 5 при ее повороте в горизонтальной плоскости. Причем положение телескопической стрелы 5 может изменяться за счет регулирования выпуска штоков гидроцилиндров 8 и 9 в диапазоне от транспортного положения до высоты, определяемой полным выпуском штоков гидроцилиндров 8, 9. Для подъема и опускания груза используется лебедка 17. Свертывание крана осуществляется в обратном порядке.
При этом в каждый момент при выпуске (уборке) штока переднего гидроцилиндра 8 подкос 14, основание 6 телескопической стрелы 5, задний гидроцилиндр 9, полости которого штоковая 19 и поршневая 20 через гидролинии 21 и 25, односторонний дроссель 22 и гидролинию 23 закрыты двусторонним гидрозамком 34, образуют жесткий треугольник из трех стержней (подкос 14, основания 6 телескопической стрелы 5 и заднего гидроцилиндра 9).
Точно так же в каждый момент при выпуске (уборке) штока 18 заднего гидроцилиндра 9 подкос 14, поворотная платформа 4, передний гидроцилиндр 8, полости которого штоковая 34 и поршневая 35 через гидролинии 40 и 36, односторонний дроссель 37 и гидролинию 38 закрыты двухсторонним гидрозамком 39, образуют жесткий треугольник из трех стержней (подкос 14, поворотной платформы 4 и переднего гидроцилиндра 8).
Кинематическая схема предложенного технического решения содержит пять звеньев, из которых одно неподвижное, четыре подвижных звена и шесть кинематических пар вращения с одной степенью свободы.
По формуле Чебышева (Артоболевский. «Теория механизмов и машин». М.: Наука. Гл. ред. физ. мат. лит. 1988, - 640 с.) число степеней свободы кинематической цепи в данной схеме равно нулю.
W=3×4-6×2=0
Таким образом, при статическом нагружении стреловой грузоподъемный кран удовлетворяет требованию неизменного взаимного положения звеньев в пространстве при действии массовых нагрузок в звеньях.
Такая кинематическая схема позволяет увеличить жесткость системы и исключить изгибающие моменты на гидроцилиндрах, при этом гидроцилиндры и подкос нагружены только осевыми нагрузками, что повышает надежность стрелового грузоподъемного крана. Увеличение жесткости конструкции в поперечном направлении достигается за счет того, что подкос, выполненный в виде трапеции, широкий П-образный конец которого соединен с поворотной платформой, а узкий П-образный конец с основанием телескопической стрелы. В продольном направлении жесткость увеличивается за счет наличия двух жестких треугольников, один из которых образован задним гидроцилиндром, подкосом и основанием телескопической стрелы, а другой - передним гидроцилиндром, подкосом и поворотной платформой.
Кроме того, предлагаемое техническое решение стрелового грузоподъемного крана позволяет расширить функциональные возможности за счет того, что данный стреловой грузоподъемный кран может работать еще в двух вариантах.
В варианте один при развертывании из транспортного положения осуществляется полный выпуск штока переднего гидроцилиндра 8 при полностью убранном штоке заднего гидроцилиндра 9. Кинематическая схема стрелового грузоподъемного крана позволяет производить погрузочно-разгрузочные работы в котловане. Для подъема и опускания груза используется лебедка 17.
При работе в варианте два после развертывания из транспортного положения необходимо произвести полный выпуск штока заднего гидроцилиндра 9 при полностью убранном штоке переднего гидроцилиндра 8. В данном варианте стреловой грузоподъемный кран позволяет производить погрузочно-разгрузочные работы в режиме, когда необходимо поднять груз на максимальную высоту или снять груз с максимальной высоты. Для подъема и опускания груза используется лебедка 17.
Стреловой грузоподъемный кран, содержащий платформу, установленную на шасси автомобиля, и соединенную с ней поворотную платформу, а также состоящую из секции и основания телескопическую стрелу, связанную с поворотной платформой посредством шарнирно соединенных с ними переднего и заднего гидроцилиндров, связанных между собой подкосом, отличающийся тем, что подкос выполнен в виде трапеции, при этом узкий П-образный конец соединен с основанием телескопической стрелы шарнирами, соосно расположенными с шарниром переднего гидроцилиндра, а широкий П-образный конец подкоса присоединен к поворотной платформе шарнирами, соосно расположенными с шарниром заднего гидроцилиндра.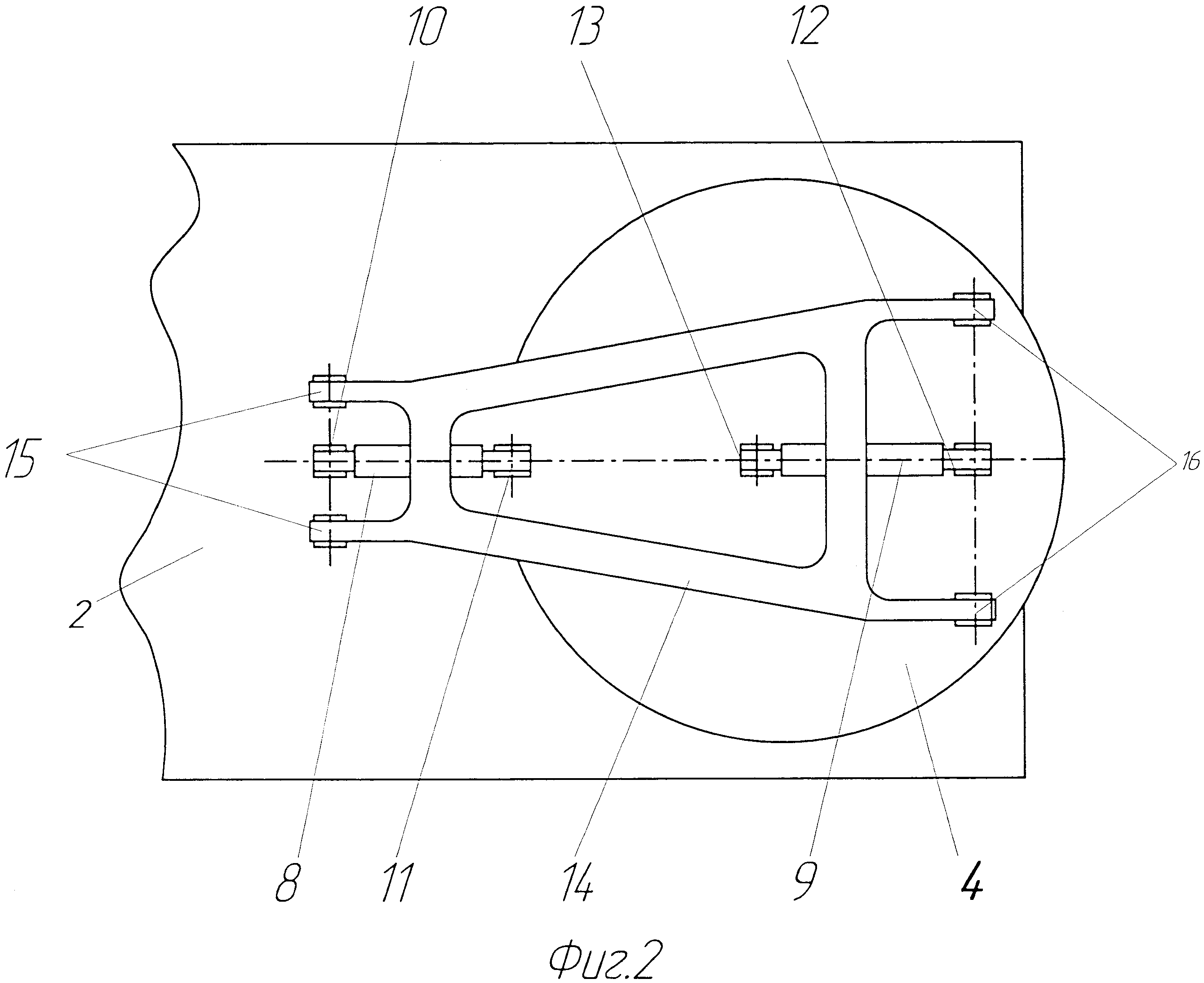
Устройство регистрации импульсного ионизирующего и импульсного оптического излучения с передачей по волс
Способ восстановления электрического сигнала по оптическому аналогу при передаче по волс с использованием внешней модуляции излучения
Устройство для определения местоположения источника сигналов
Устройство для определения пеленга и дальности до источника сигналов
Способ исследования в лабораторных условиях сотрясений элементов подводного аппарата при воздействии на него подводной ударной волны
Устройство для определения направления и дальности до источника сигналов
Устройство для определения пеленга и дальности до источника сигналов
Способ определения направления и дальности до источника сигналов
Способ имитации радиосигнала
Устройство для цифрового управления импульсным преобразователем
Генератор
Устройство регистрации импульсного ионизирующего и импульсного оптического излучения с передачей по волс
Способ восстановления электрического сигнала по оптическому аналогу при передаче по волс с использованием внешней модуляции излучения
Устройство для определения местоположения источника сигналов
Устройство для определения пеленга и дальности до источника сигналов
Способ исследования в лабораторных условиях сотрясений элементов подводного аппарата при воздействии на него подводной ударной волны
Устройство для определения направления и дальности до источника сигналов
Устройство для определения пеленга и дальности до источника сигналов
Способ определения направления и дальности до источника сигналов
Способ имитации радиосигнала

