Результат интеллектуальной деятельности: СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА РЕЛЬЕФА МЕСТНОСТИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Вид РИД
Изобретение
Изобретение относится к способам траекторного управления беспилотными летательными аппаратами (БЛА) как гражданского, так и военного назначения и может быть использовано для повышения их живучести при выполнении маловысотных полетов.
Повышение живучести летательных аппаратов в процессе управления ЛА [1] является одной из основных тенденций развития систем с БЛА. Одним из направлений повышения живучести БЛА при совершении маловысотных полетов (МВП) в условиях сильно пересеченной местности является облет групп препятствий в вертикальной плоскости. В пилотируемых летательных аппаратах (ЛА) для осуществления МВП над пересеченной местностью используется специальный радиолокационный комплекс - радиоэлектронная система управления маловысотным полетом (РЭСУ МВП), основной задачей которой является формирование профильного полета ЛА, при котором траектория полета летательного аппарата повторяет профиль рельефа местности. Важно отметить, что РЭСУ МВП должна обеспечивать решение задач в любое время года, суток и при любых метеоусловиях. Указанные требования предопределяют многоканальный принцип построения вычислительной системы радиолокационного комплекса с использованием РЛС для определения расстояния до препятствий и радиовысотомеров для контроля текущей высоты [2]. Таким образом, в состав указанной системы входит оборудование, которое характеризуется достаточно большими массогабаритными и стоимостными характеристиками. Очевидно, что применение аналогичного комплекса в составе бортового оборудования БЛА представляется нецелесообразным по критерию «стоимость-эффективность». Кроме этого, при решении некоторых специальных задач использование активного радиолокатора не рекомендуется, так как это может служить сильным демаскирующим фактором.
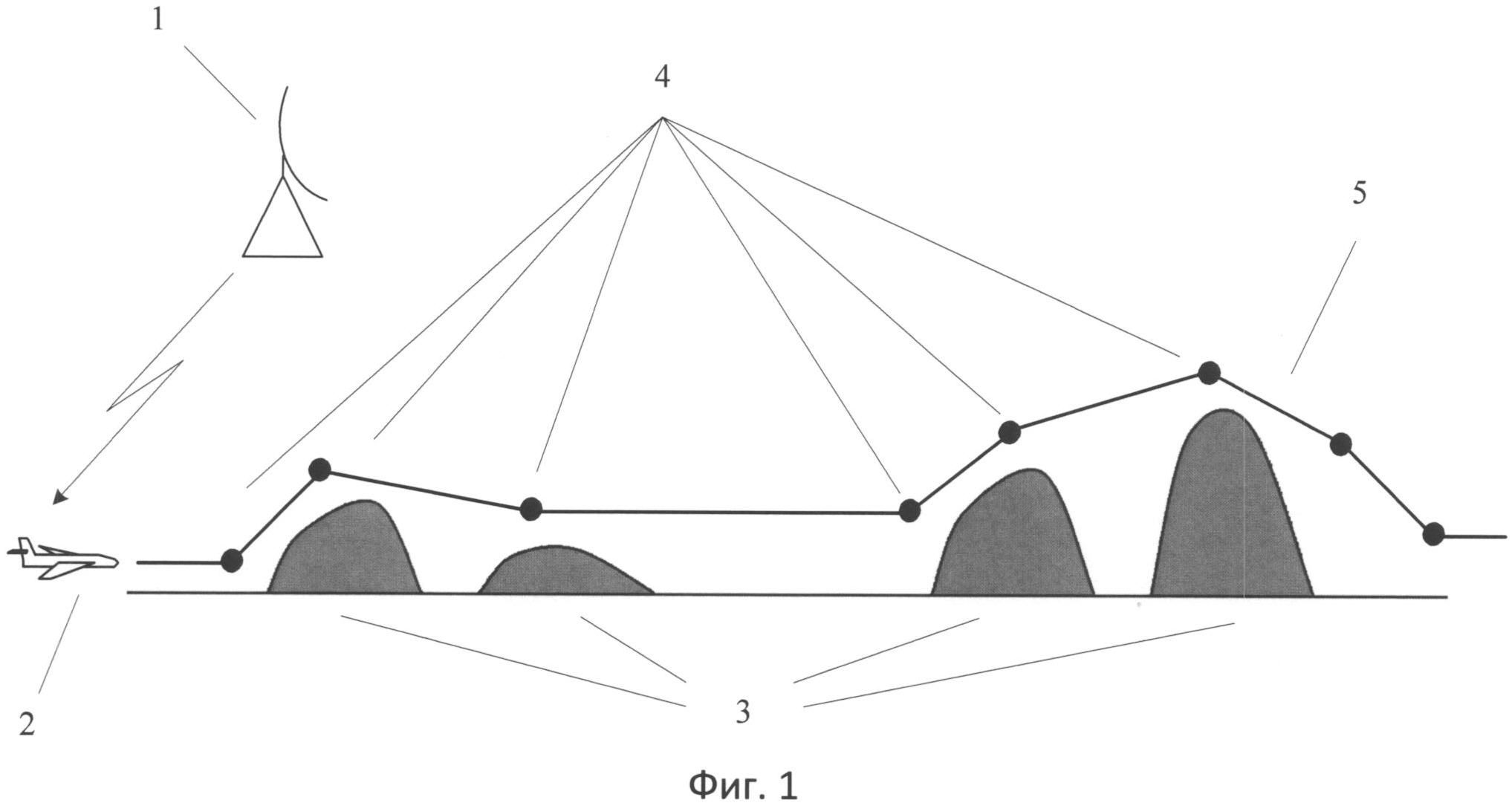
В существующих системах с БЛА [2] (см. фиг. 1), включающих пункт управления 1 и беспилотный летательный аппарат 2, для облета неровностей рельефа местности 3 при маловысотном полете, как правило, используется маршрутный метод, который осуществляется в два этапа. На первом (подготовительном) этапе диспетчером (оператором, офицером боевого управления) намечается ряд контрольных точек 4, которые должен пройти БЛА с заданным углом тангажа. Далее для обеспечения последовательного прохождения БЛА намеченных точек в штурманском расчете реализуются алгоритмы наведения на неподвижные цели (поочередно на каждую соответствующую контрольную точку). На втором этапе осуществляется непосредственно управление летательным аппаратом 2 для обхода группы препятствий в вертикальной плоскости 3 по рассчитанным траекториям 5 при помощи команд управления с диспетчерского (командного) пункта управления 1. Процедуру существующего способа облета группы препятствий летательным аппаратом иллюстрирует фиг. 1.
Следует отметить, что такой способ облета групп препятствий, связанный с нанесением контрольных точек, предполагает непосредственное участие человека и представляет собой довольно трудоемкую задачу, поскольку такие действия необходимо производить для каждого БЛА. При этом нанесение таких точек требует наличия большого опыта у оператора и, в общем случае, это является нетривиальной задачей.
Техническим результатом предлагаемого изобретения является повышение живучести БЛА за счет использования командного управления и автоматизации процесса облета групп препятствий в вертикальной плоскости при маловысотном полете БЛА по запланированному маршруту.
Заявленный технический результат достигается за счет того, что при планировании маршрута полета БЛА каждое препятствие группы в вертикальной плоскости аппроксимируется полуэллипсом, то есть расположенной в верхней части координатной плоскости OXY половиной эллипса, одна из осей которого лежит на оси ОХ (совпадающей с нулевой выстой). Центром и осями такого полуэллипса считаются центр и оси порождающего его эллипса соответственно. Оператор для описания выбранного препятствия указывает только центр такого полуэллипса и значения его полуосей. Далее осуществляется непосредственно управление летательным аппаратом с обходом групп препятствий путем коррекции рассчитанной траектории наведения.
Возможность достижения технического результата обусловлена следующими причинами:
- существенным уменьшением времени описания оператором препятствий, что снижает нагрузку на оператора (офицера боевого управления) [3];
- универсальным (однотипным) способом описания препятствий, что дает возможность применять традиционные методы управления летательными аппаратами [2].
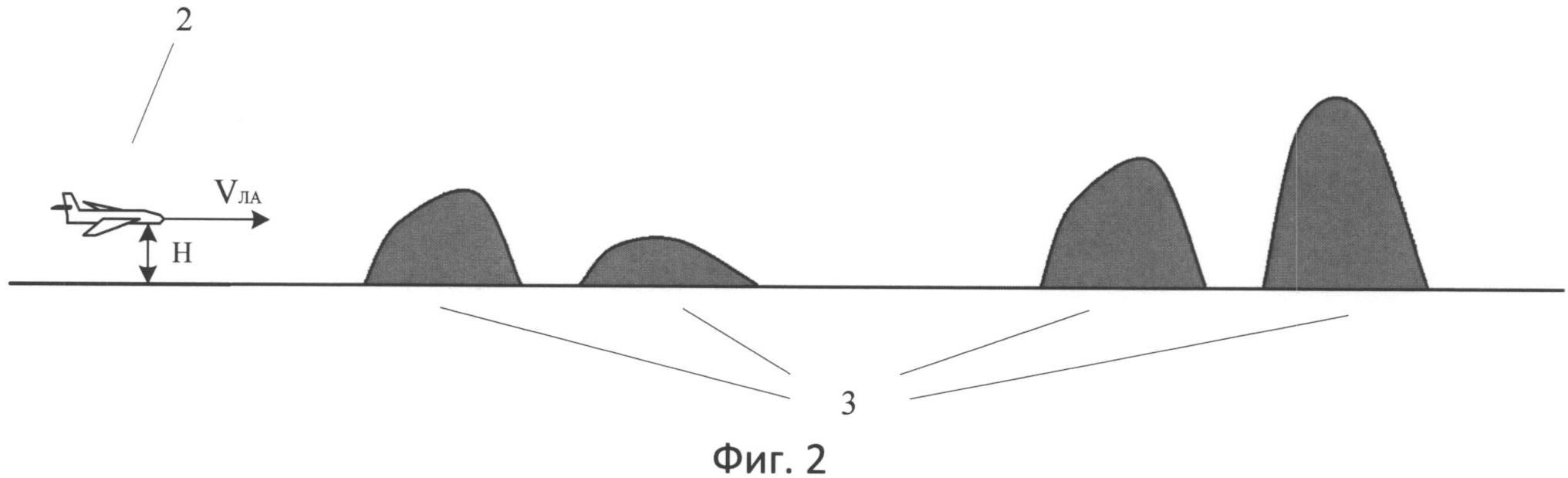
Вариант взаимного расположения управляемого летательного аппарата и группы препятствий иллюстрирует фиг. 2, на которой летательный аппарат движется равномерно со скоростью VЛА прямолинейно и параллельно земной поверхности на заданной высоте Н. Препятствия различной конфигурации расположены группами.
Для таких условий одним из возможных способов управления, повышающим живучесть беспилотного летательного аппарата, является новый способ, полученный на основе математического аппарата метода обратных задач динамики [4], в котором траектория управляемого БЛА корректируется при сближении его с группой препятствий путем совмещения его вектора скорости с касательной, построенной к желаемой траектории. Вычисление требуемого приращения угла тангажа (параметра рассогласования между требуемым и текущим углом тангажа) управляемого БЛА производится по правилу:

где переменные w1 и w2 вычисляются путем дифференцирования функции ψ(x,y) от координат БЛА. Система координат OXY выбирается таким образом, чтобы координата у соответствовала высоте полета, а направление оси координат х - направлению полета БЛА. Выражение для переменных w1 и w2 имеет вид:

Функция ψ(x,y) - функция тока потока идеальной жидкости при обтекании нескольких эллиптических цилиндров, которая может быть получена на основе положений теории функций комплексного переменного и выражения для комплексного потенциала бесциркуляционного обтекания эллиптических цилиндров, будучи выделена как его мнимая часть.
Выражение для комплексного потенциала и зависимости для функции тока и потенциала скорости результирующего потока идеальной жидкости, в свою очередь, с использованием конформного отображения внешности контура эллиптического цилиндра на внешность кругового цилиндра [5, 6] в рассматриваемом случае записываются следующим образом:

где  ,
,  ,
,
z=x+iy - комплексная переменная на комплексной плоскости OXY, N - количество аппроксимирующих препятствия полуэллипсов, VЛА - скорость БЛА на бесконечно большом расстоянии от полуэллипсов, a i и bi - значения полуосей i-го полуэллипса; z0i - координаты центра i-го полуэллипса в выбранной системе координат OXY.
Указанные параметры определяются либо на диспетчерском (командном) пункте, либо непосредственно на борту БЛА.
Корректировка угла тангажа БЛА начинается тогда, когда расстояние от управляемого БЛА до центра аппроксимирующего препятствие полуэллипса становится меньше определенной величины:

где xП и yП - координаты центра полуэллипса аппроксимации; x и y - координаты БЛА; L - заданное расстояние.
Примерный вид траектории облета 7 группы препятствий, которые аппроксимированы полуэллипсами 6, представлен на фиг. 3. Здесь же показано требуемое приращение Δϑ угла тангажа (параметра рассогласования) управляемого БЛА, сформированного по правилу (1).
Таким образом, для коррекции угла тангажа при облете групп препятствий в вертикальной плоскости описанным способом (1)-(4) необходимо учитывать:
1) параметры движения БЛА - координаты x и y, значение скорости VЛА и текущий угол тангажа ϑ;
2) параметры групп препятствий - координаты центров полуэллипсов аппроксимации z0i и значения их полуосей a i и bi.
Величины, необходимые для реализации (1)-(4) и составляющие первую группу параметров, измеряются как штатными средствами на диспетчерских (командных) пунктах, так и на борту БЛА, а величины, составляющие вторую группу, расположены в памяти ЭВМ КП ВП, куда они заносятся непосредственно диспетчером (оператором, офицером боевого управления).
Коррекция угла тангажа управляемого БЛА прекращается, когда его высота становится равной начальной (заданной) высоте Н полета беспилотного летательного аппарата, определяемой запланированным маршрутом полета.
Спецификой описанного способа является то, что зависимости (1)-(4) построены на основе аппроксимации групп препятствий в вертикальной плоскости. Такой подход позволяет унифицировать и автоматизировать процесс описания складок рельефа местности и иных препятствий, тем самым существенно снизив нагрузку на диспетчера (оператора, офицера боевого управления).
Заявленный технический результат обеспечивается предлагаемым способом (1)-(4) управления беспилотным летательным аппаратом, а также использованием универсального (однотипного) способа описания групп препятствий в вертикальной плоскости, что дает возможность существенно уменьшить время описания рельефа диспетчером (оператором, офицером боевого управления), тем самым снизив нагрузку на него.
Таким образом, указанный технический результат достигается тем, что на основе измеренных значений скорости полета VЛА и высоты полета Н беспилотного ЛА, а также заданных диспетчером (оператором, офицером боевого управления) значений координат центров полуэллипсов аппроксимации и их полуосей с использованием (3) вычисляется функция тока ψ(x,y). Затем с помощью (2) определяются значения переменных w1 и w2, на основании которых и измеренного значения текущего угла тангажа ϑ с помощью (1) формируется сигнал требуемого приращения угла тангажа Δϑ для БЛА, позволяющий произвести облет группы препятствий.
Важно отметить, что указанный способ траекторного управления беспилотным летательным аппаратом может быть реализован в двух режимах:
1) в режиме командного наведения, в котором параметры движения управляемого летательного аппарата - значение скорости и значение координат БЛА - определяются на диспетчерском (командном) пункте управления;
2) в автономном режиме, в котором параметры движения управляемого летательного аппарата - значение скорости и значение координат БЛА - определяются непосредственно на борту БЛА.
При этом значение текущего угла тангажа ϑ в обоих случаях измеряется только на борту БЛА.
Это обстоятельство позволяет использовать описанный способ управления для коррекции траекторий полета летательных аппаратов как гражданской, так и военной авиации при облете ими групп препятствий в вертикальной плоскости при маловысотном полете.
Литература
[1] Верба В. С.Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. М.: Радиотехника. 2008. 432 с.
[2] Авиационные системы радиоуправления. Т. 3. Системы командного радиоуправления. Автономные и комбинированные системы наведения / В.И. Меркулов, А.И. Канащенков [и др.]. М.: Радиотехника, 2004. 317 с.
[3] Авиация ПВО России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Е.А. Федосов [и др.]. М.: Дрофа, 2001.
[4] Крутько П.Д. Обратные задачи динамики в теории автоматического управления. М.: Машиностроение, 2004.
[5] Лойцянский Л.Г. Механика жидкости и газа. Физматгиз, 1959.
[6] Лаврентьев М.А., Шабат Б.В. Методы теории функций комплексного переменного. М.: Наука, 1965, 716 с.
Способ управления пилотируемыми и беспилотными летательными аппаратами (БЛА) при совершении маловысотного полета с облетом групп препятствий в вертикальной плоскости с диспетчерского (командного) пункта (ДП), заключающийся в том, что вывод БЛА на запланированную прямолинейную и параллельную земной поверхности траекторию полета производится по траектории облета группы препятствий с заданными углами тангажа, отличающийся тем, что траектория управляемого БЛА корректируется при сближении его с группой препятствий, каждое из которых аппроксимируется полуэллипсом, для чего вычисление требуемого приращения угла тангажа (параметра рассогласования между требуемым и текущим углом тангажа) управляемого БЛА производится по правилу: где здесь w и w - составляющие вектора скорости управляемого летательного аппарата, ψ(x,y) - функция координат x и y управляемого БЛА в неподвижной системе координат OXY, определяемая как мнимая часть выражения для комплексного потенциала: где , , z=x+iy - комплексная переменная на комплексной плоскости OXY, N - количество аппроксимирующих препятствия полуэллипсов, V - скорость БЛА на бесконечно большом расстоянии от полуэллипсов, a и b - значения полуосей i-го полуэллипса; z - координаты центра i-го полуэллипса в выбранной системе координат OXY, при этом корректировка угла тангажа БЛА начинается тогда, когда расстояние от управляемого БЛА до центра аппроксимирующего препятствие полуэллипса становится меньше определенной величины L: где x и y - координаты центра полуэллипса аппроксимации, x и y - координаты БЛА, и осуществляется до момента, когда высота полета БЛА становится равной начальной высоте Н.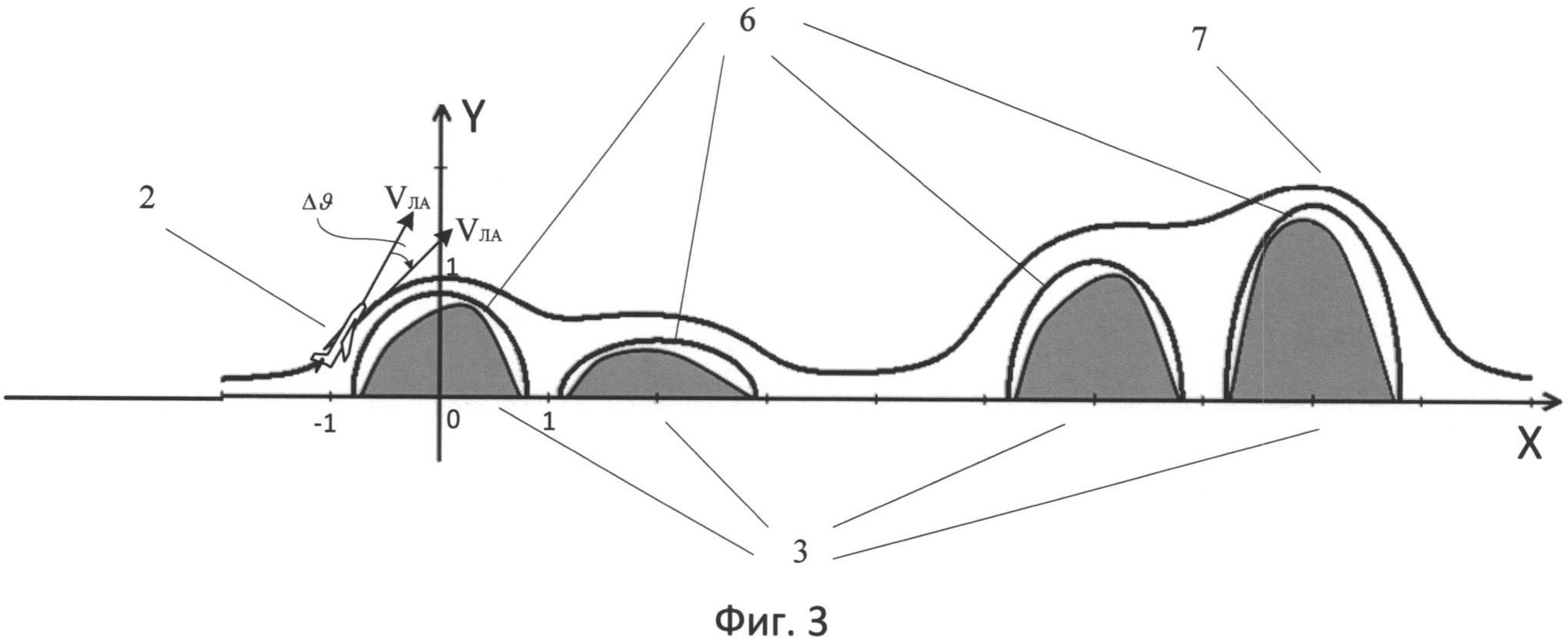





Способ экранирования в электронном модуле
Способ изготовления многослойных печатных плат на теплоотводящей подложке
Волноводная нагрузка
Способ изготовления пресс-формы из материала с термостойкой полимерной матрицей
Способ изменения направления и уменьшения расходимости излучения полупроводникового вертикально излучающего лазера
Способ временного закрепления подложек на технологическом основании
Сверхширокополосный радиолокатор с активной многочастотной антенной решеткой
Способ многоступенчатой фильтрации для систем автосопровождения
Способ подготовки кристаллической или поликристаллической подложки под металлизацию
Способ устранения несоответствия динамичности подсистем в составе сложных технических систем и система обеспечения бессрывного сопровождения интенсивно маневрирующей цели
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации
Способ экранирования в электронном модуле
Способ изготовления многослойных печатных плат на теплоотводящей подложке
Волноводная нагрузка
Способ изготовления пресс-формы из материала с термостойкой полимерной матрицей
Способ изменения направления и уменьшения расходимости излучения полупроводникового вертикально излучающего лазера
Способ временного закрепления подложек на технологическом основании
Сверхширокополосный радиолокатор с активной многочастотной антенной решеткой
Способ многоступенчатой фильтрации для систем автосопровождения
Способ подготовки кристаллической или поликристаллической подложки под металлизацию

