Результат интеллектуальной деятельности: СИСТЕМА ПОСЛЕАВАРИЙНОГО ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к автономному управлению транспортным средством и, в частности, к планированию и следованию по траектории после столкновения с целью снижения риска повторного столкновения.
Уровень техники
На данный момент существует несколько систем управления транспортным средством, которые позволяют расширить возможности водителя по управлению транспортным средством, например, антиблокировочные тормозные системы (antilock brake systems, ABS), противобуксовочные тормозные системы (traction control systems, TCS), a также системы курсовой устойчивости (stability control, SC). К системам курсовой устойчивости можно отнести электронные системы контроля устойчивости (electronic stability control, ESC, или иногда системы контроля устойчивости по углу рыскания (yaw stability control, YSC)), a также системы устойчивости по крену (roll stability control, RSC). Системы ESC еще иногда называют электронными программами стабилизации (electronic stability program, ESP) или системами динамической стабилизации (dynamic stability traction control, DSTC).
Системы курсовой устойчивости применяют для осуществления управляемой и стабильной работы транспортного средства для повышения уровня безопасности самого транспортного средства и находящихся в нем пассажиров. Зачастую системы курсовой устойчивости применяют для осуществления управления транспортным средством в соответствии с выбранным водителем направлением движения для того, чтобы транспортное средство не сошло с дороги и/или не опрокинулось. Например, система курсовой устойчивости обычно сравнивает выбранное водителем направление, полученное на основании угла поворота рулевого колеса, с траекторией движения, определяемой датчиками движения, которые установлены в транспортном средстве. Путем регулировки степени торможения для каждого колеса транспортного средства и его силы тяги можно сохранить желаемое направление движения.
Существующие системы курсовой устойчивости выполняют корректировку нежелательных движений транспортного средства, вызываемых изменением передаваемого колесом на дорогу усилия (tire force disturbance, TFD), например, из-за неровностей или несоответствия дорожного покрытия намерениям водителя. Это несоответствие обычно возникает при наличии значительной разницы между поперечными нагрузками на передние и задние колеса, между продольными нагрузками на правые и левые колеса или в случае одновременного возникновения обеих ситуаций.
Нежелательное движение рыскания (отклонение от траектории) также может быть вызвано изменением поворачивающего момента, возникающим при изменении силы, действующей на транспортное средство, которое не связано с изменением передаваемого колесом на дорогу усилия. Изменение силы, действующей на корпус (body force disturbance, BFD), может возникнуть при ударе транспортного средства о неподвижный объект (например, дерево), либо о другой подвижный объект (например, другое транспортное средство). Изменение силы, действующей на корпус, также может возникнуть при резком сильном порыве ветра. В то время как величина изменения передаваемого колесом на дорогу усилия ограничена условиями дорожного покрытия, величина изменения силы, действующей на корпус, может иметь гораздо меньшие ограничения. Например, столкновение двух движущихся транспортных средств может вызвать изменение силы, действующей на корпус, которое на несколько порядков превышает общее передаваемое колесом на дорогу усилие. Движение рыскания может быть вызвано передачей транспортному средству силы, действующей на корпус, от внешнего источника, в результате чего траектория или направление движения транспортного средства может быть изменена, что, в свою очередь, может привести к повторному столкновению. Во многих ситуациях в случае повторного столкновения риск получения травм или повреждений может значительно возрастать по сравнению с первичным столкновением.
Системы курсовой устойчивости помогают водителю транспортного средства следовать выбранной траектории движения. Однако в результате предстоящего или текущего изменения силы, действующей на корпус, водитель может запаниковать и выполнить неадекватные или резкие действия в попытке избежать изменения силы, действующей на корпус, что может привести к последующим нежелательным ситуациям. Исследования показали, что приблизительно в одной трети всех аварий с участием нескольких транспортных средств, в результате которых были получены тяжелые травмы, имело место повторное столкновение. После относительно слабого первого столкновения очень часто происходит второе, более сильное столкновение. Подобное второе столкновение может быть, например, столкновением нескольких транспортных средств, столкновением транспортного средства с объектом, опрокидыванием или съездом с дороги.
Таким образом, для снижения вероятности и/или силы повторного столкновения после первого удара желательно выполнить автоматическое действие с учетом вероятности ошибочного действия водителя.
Раскрытие изобретения
В одном аспекте изобретения предложено транспортное средство, которое имеет систему мониторинга окружающих условий, состоящую из множества датчиков для обнаружения заранее определенных угроз безопасности, связанных с множеством различных областей назначения снаружи транспортного средства при его движении по дороге. В качестве целевой области система мониторинга окружающих условий выбирает одну из потенциальных областей назначения, в которой существует минимальный риск для безопасности (например, риск повторного столкновения). Блок определения траектории подбирает множество возможных траекторий следования транспортного средства в эту целевую область, проверяет заранее определенные угрозы безопасности заранее заданных типов, связанные с множеством возможных траекторий, и выбирает в качестве целевой траектории одну из возможных траекторий, которая представляет наименьший риск безопасности. Датчик обнаружения столкновения позволяет обнаружить столкновение между транспортным средством и другим объектом. Система курсовой устойчивости выполнена с возможностью при обнаружении столкновения направить транспортное средство в автономном режиме по выбранной траектории.
Краткое описание чертежей
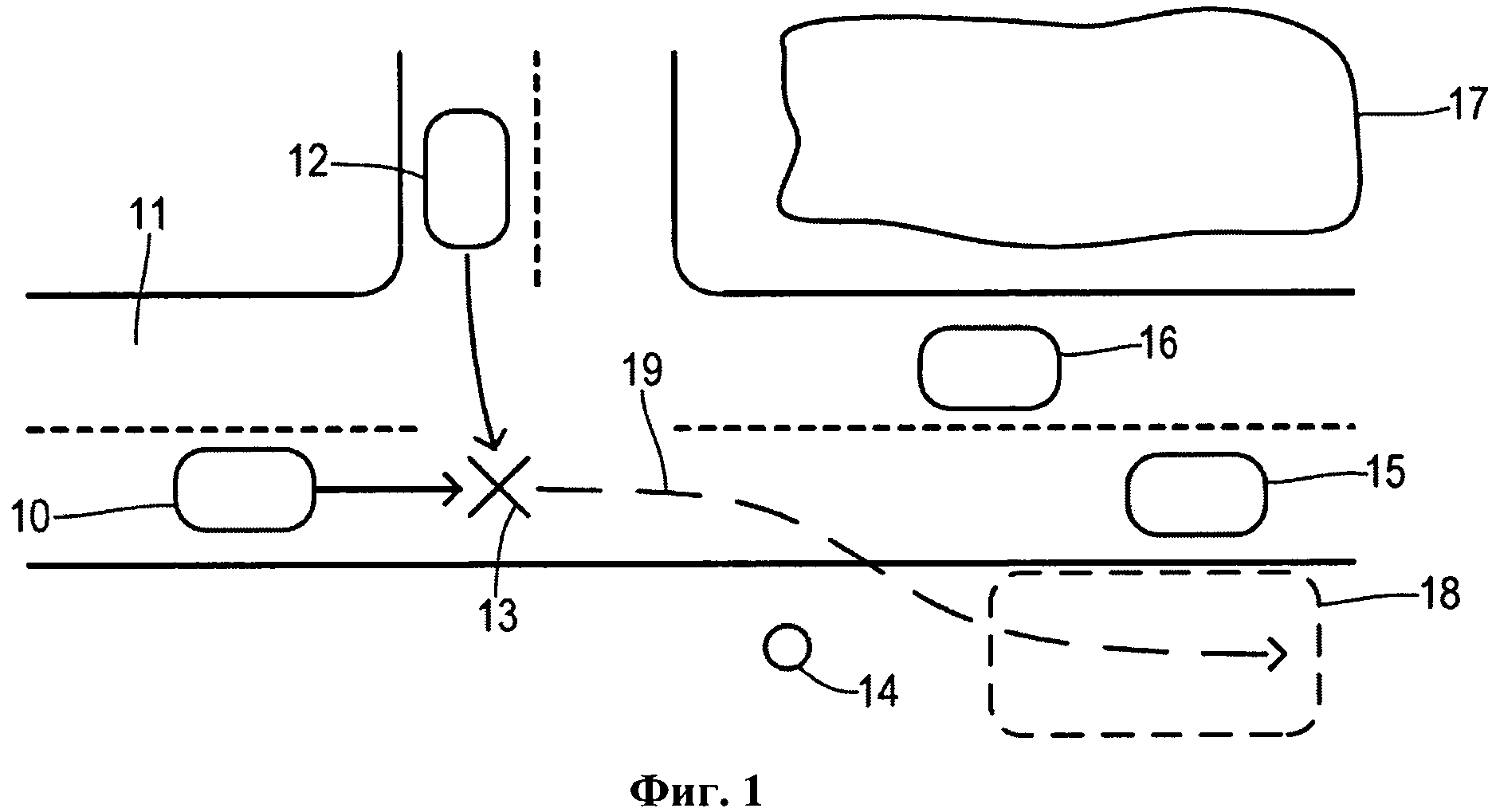
На Фиг. 1 представлена схема первого столкновения и безопасная траектория движения, по которой необходимо следовать после столкновения.
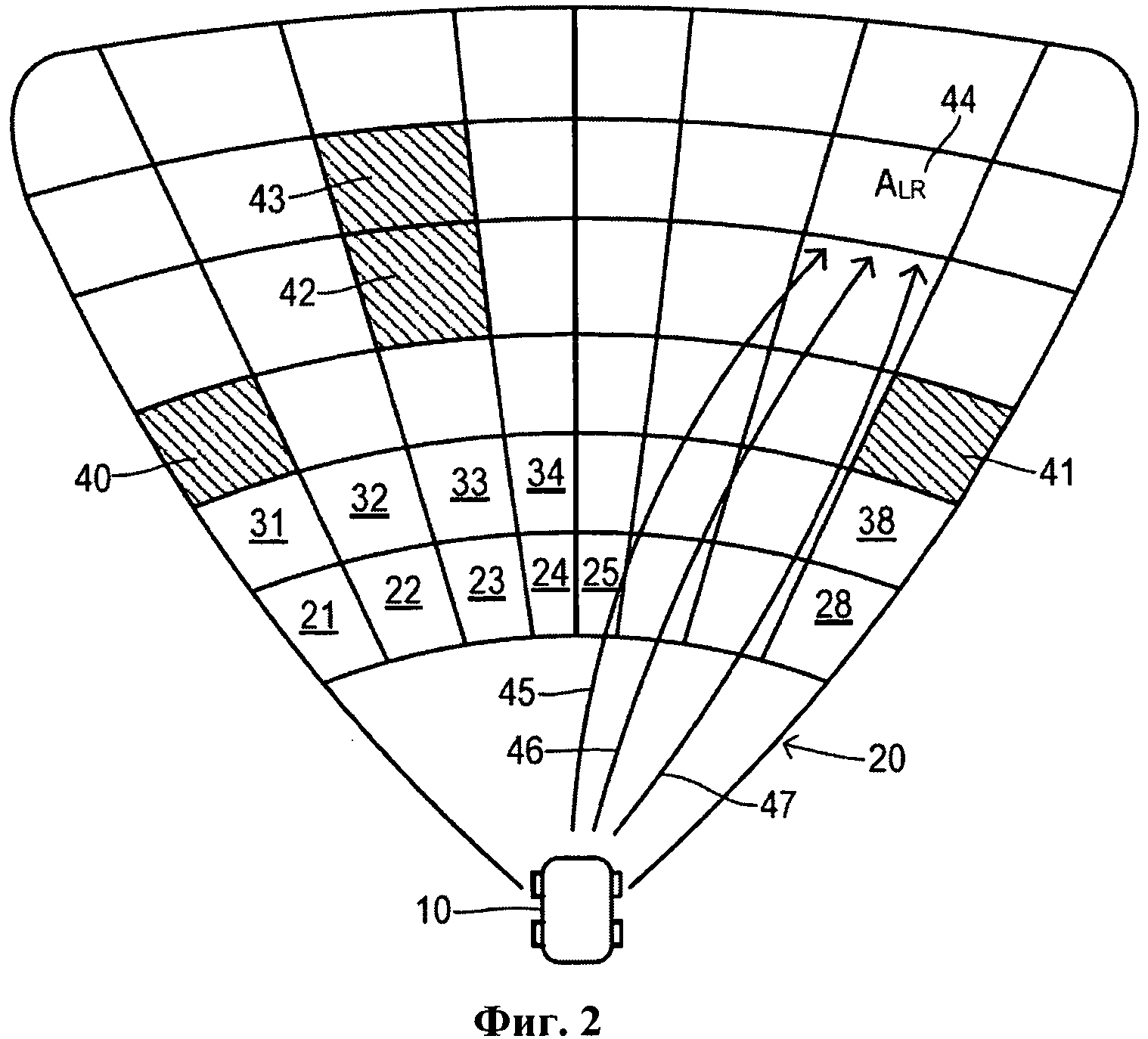
На Фиг. 2 изображена схема с сеткой, используемой для определения самой безопасной области и самой безопасной траектории к ней.
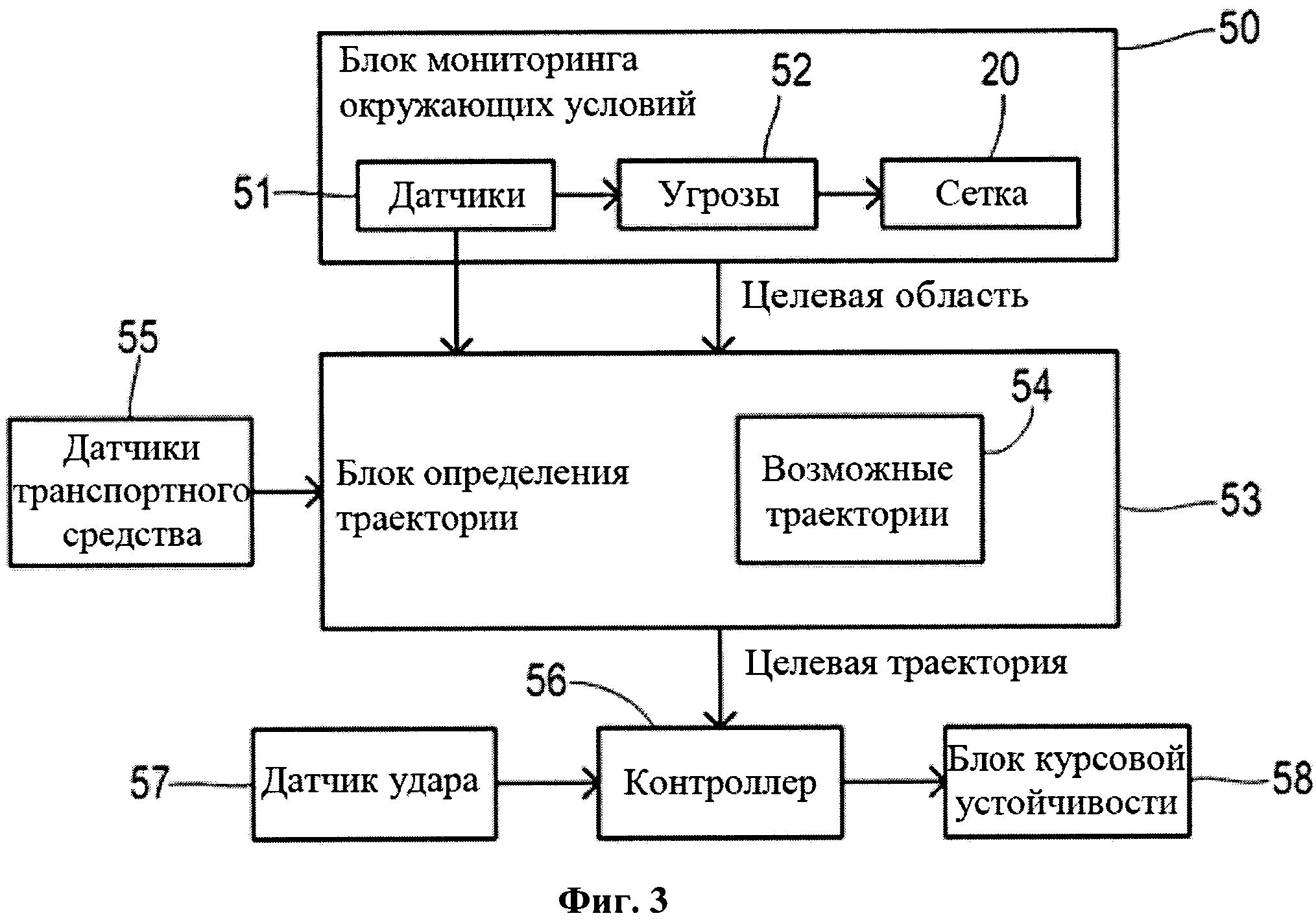
На Фиг. 3 изображена схема одного варианта выполнения устройства согласно настоящему изобретению.
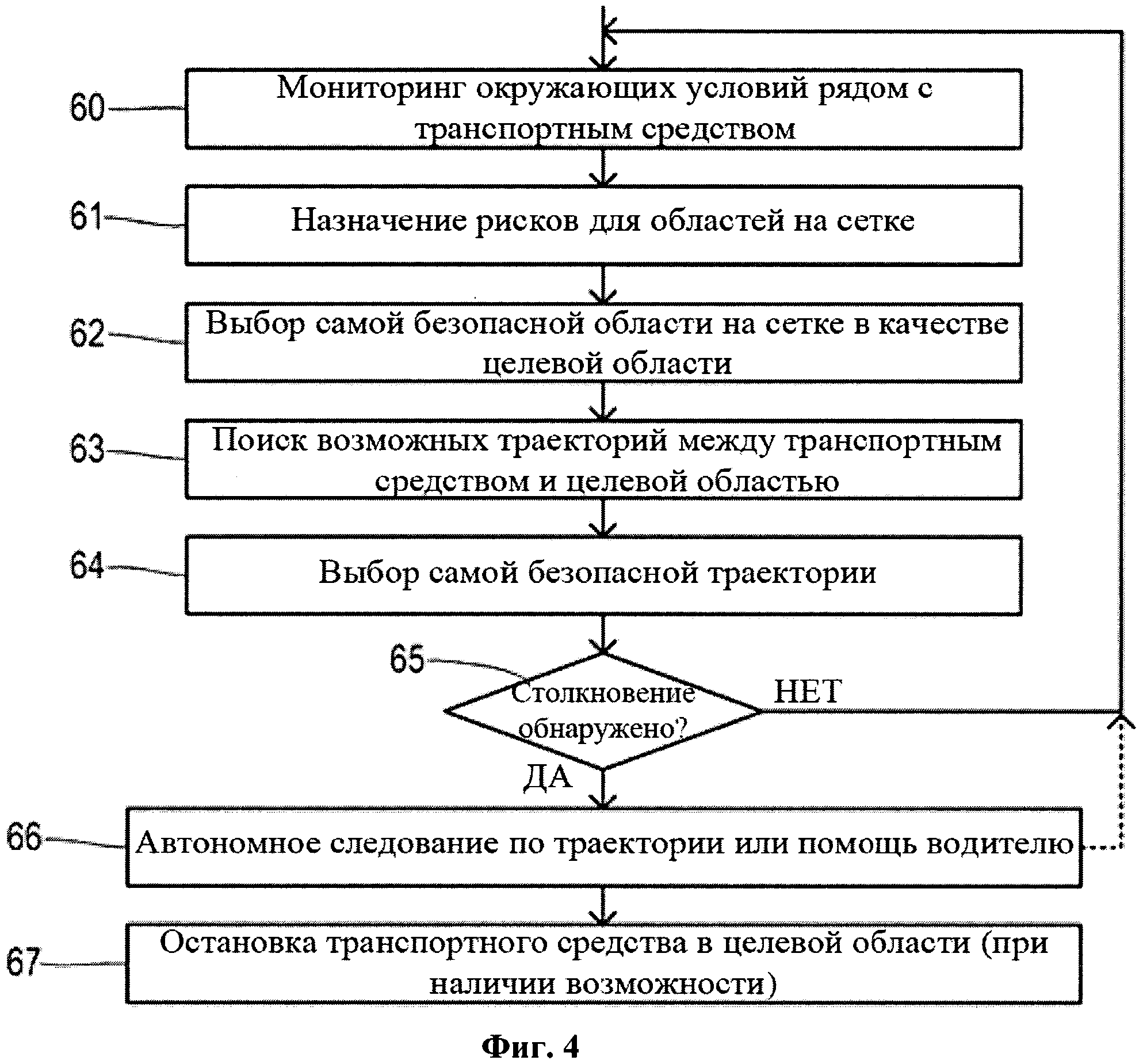
На Фиг. 4 изображена блок-схема процесса для одного предпочтительного варианта осуществления способа в соответствии с настоящим изобретением.
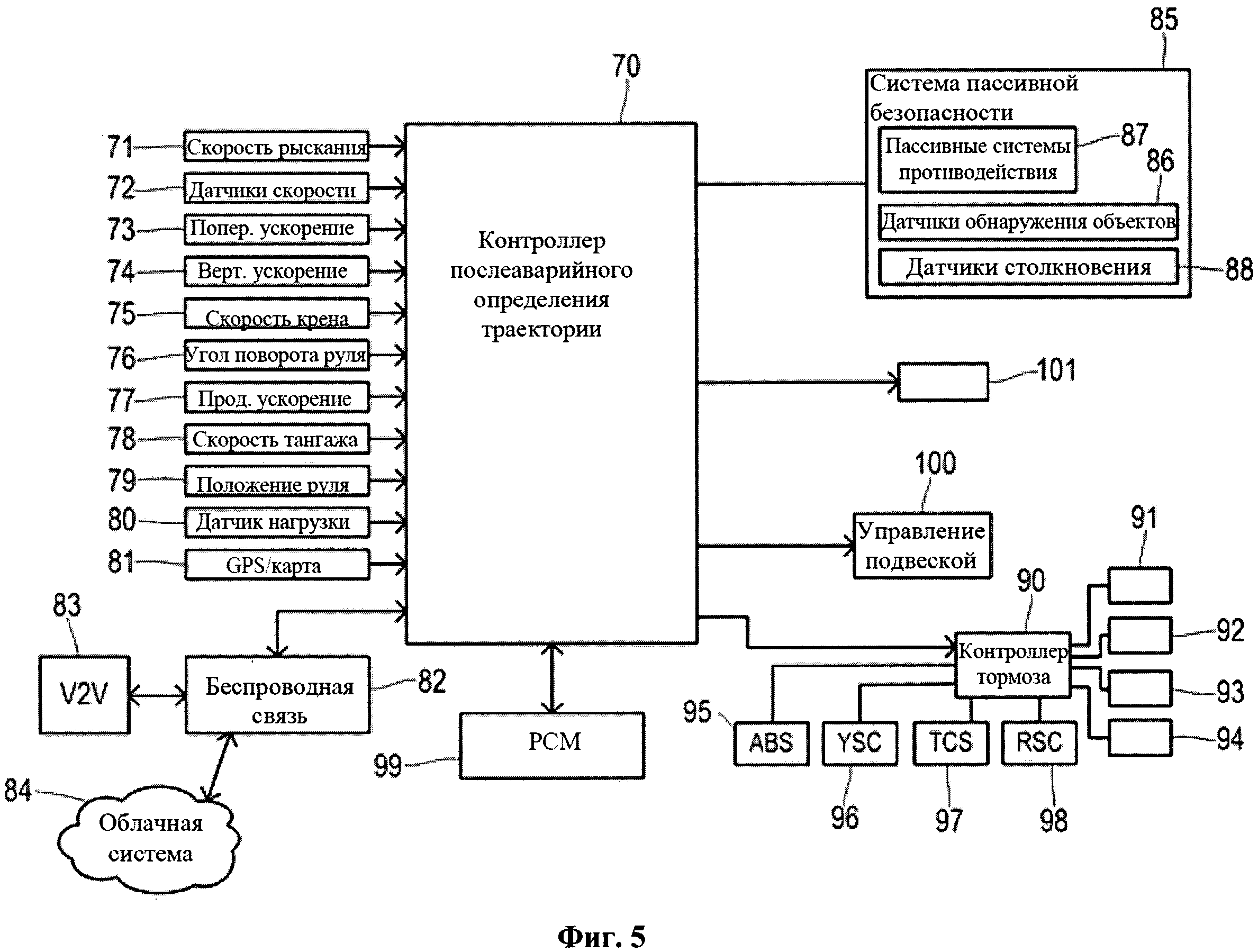
На Фиг. 5 представлена схема альтернативного варианта осуществления изобретения.
Осуществление изобретения
В соответствии с настоящим изобретением, когда транспортное средство получает удар, который может направить его на траекторию столкновения с другим объектом или на нежелательную траекторию (например, на полосу с интенсивным движением или в небезопасное место, например, в озеро или на крутой склон), активируется автономная система управления транспортным средством (например, система векторизации крутящего момента, система активного рулевого управления, система активного торможения или система активного дросселирования для выполнения корректировки траектории во избежание движения по нежелательной траектории).
Устройство, соответствующее настоящему изобретению, может также предотвратить получение травм пассажиром после первичного столкновения. Система измерения предназначена для мониторинга окружающих условий и определения области ALR (low risk area), которая имеет минимальную вероятность вторичного столкновения при попадании оборудованного транспортного средства в данную область. Блок определения возможной траектории подбирает все возможные траектории, по которым транспортное средство может пройти для попадания в область ALR с минимальным риском. Система планирования траектории, встроенная или взаимодействующая с блоком определения траектории, выбирает наиболее безопасную траекторию из всех возможных вариантов. Определение области ALR с наименьшим риском и выбор траектории выполняется практически непрерывно во время движения транспортного средства, чтобы исключить задержку срабатывания в случае столкновения. Система обнаружения столкновения позволяет обнаружить столкновение. После обнаружения столкновения активируются средства курсовой устойчивости для следования по выбранной траектории. Предпочтительно, чтобы системы измерения и планирования траектории продолжали отслеживать изменение риска и надлежащим образом корректировали свою работу в соответствии с изменениями рисков.
Предпочтительно система измерения может оценивать установленные угрозы безопасности для определения области ALR и траектории с наименьшим риском либо на основании информации от радиолокационных, лидарных, ультразвуковых датчиков, видеосенсоров (камер), устройств ночного видения или других датчиков (большая часть которых может быть установлена на транспортное средство на заводе вместе с системой предупреждения столкновения с впереди идущим транспортным средством, системой адаптивного круиз-контроля или системой помощи при парковке), либо на основании удаленной информации, полученной от систем взаимодействия транспортного средства и дорожной инфраструктуры, систем взаимодействия транспортных средств, систем облачных вычислений или систем навигации и цифровых карт.
Область ALR с наименьшим риском может быть определена путем исключения областей на сетке вокруг транспортного средства, которые имеют высокую вероятность возникновения повторного столкновения или других угроз, с использованием всех доступных датчиков. К таким угрозам можно отнести область или траекторию, которые ведут к озеру, крутому обрыву, бездорожной местности с набережной, на полосу с интенсивным движением, к возможному столкновению с другими транспортными средствами, область, в которой может произойти опрокидывание, траекторию, ведущую к неподвижному объекту, например, к столбу, дереву или зданию.
Детектор удара может включать в себя датчики столкновения, датчики движения или другие датчики системы послеаварийной устойчивости. Система курсовой устойчивости, используемая для следования по желаемой траектории после столкновения, предпочтительно может быть такой же, как и система, используемая на транспортном средстве для помощи водителю до столкновения. Система по изобретению постоянно рассчитывает траектории с наименьшим риском во время вождения, после чего использует первое столкновение как сигнал к включению функции автономного управления с помощью векторизации крутящего момента, активного рулевого управления, активного торможения, активного дросселирования или активного рулевого управления с электроусилителем (EPAS). Функция автономного управления после удара может направить транспортное средство по безопасной траектории при отсутствии или при неправильном управлении водителем. Если водитель направляет транспортное средство в сторону безопасной области, то система по изобретению может своевременно помочь водителю в управлении. Если кинетическая энергия транспортного средства может быть подавлена в достаточной степени, чтобы остановить транспортное средство в пределах области наименьшего риска, то функция автономного вождения также может быть использована для остановки транспортного средства.
На Фиг. 1 оборудованное транспортное средство 10 движется по дороге 11 в сторону перекрестка. Второе транспортное средство 12 въезжает на перекресток, что приводит к столкновению и удару на участке 13. В результате столкновения траектория оборудованного транспортного средства 10 изменяется. Транспортное средство 10 может двигаться по пути, который может привести к вторичному столкновению со столбом 14, ближними транспортными средствами 15 и 16 или к водоему 17. Водитель может быть неспособен вырулить в безопасную зону или может совершить ошибочные действия, которые не уберегут его от вторичного столкновения. Таким образом, система по изобретению автоматически определяет безопасную зону 18, которая имеет наименьший риск для безопасности, а также траекторию 19, которая с наибольшей вероятностью позволяет безопасно попасть в зону 18.
Используя удаленную систему измерения для определения возможных рисков для безопасности, система по изобретению использует сетку 20, разделенную на множество возможных областей назначения, расположенных в непосредственной близости от транспортного средства 10. Некоторые из возможных областей назначения пронумерованы 21-25, 28, 31-34, 38 и 40-44. Каждая возможная область назначения находится под соответствующим курсовым углом и на соответствующем расстоянии от транспортного средства 10, а также может предпочтительно иметь ширину, длину и форму, примерно соответствующие транспортному средству. Используя системы удаленного обнаружения объектов, классификации и слежения, каждый обнаруженный объект риска для безопасности наносится на схему, в соответствующую возможную область назначения. Например, любые места, в которых может произойти вторичное столкновение (например, со столбом или подвижным объектом, либо при наличии опасных характеристик дорожного покрытия или крутого уклона), могут быть исключены из перечня безопасных областей назначения и траекторий. Таким образом, несколько областей 40-43 будут заштрихованы, т.е. они не будут рассмотрены при выборе в качестве области назначения или целевой траектории.
Для любых оставшихся областей могут быть учтены угрозы безопасности и другие факторы, которые необходимо принять во внимание при анализе рисков. Конкретная величина риска может отражать, например, близость данной области к другой области, представляющей известную угрозу для безопасности. На Фиг. 2 область 44 была определена как область с наименьшим риском для безопасности. Таким образом, в соответствии с настоящим изобретением она становится областью ALR с наименьшим риском.
После выбора целевой области ALR производится подбор (т.е. определение) нескольких возможных траекторий 45-47 на основании различных параметров системы управления транспортным средством, определенного состояния транспортного средства и исключенных областей (например, области 41). Выполняется контроль угроз безопасности, связанных с каждой возможной траекторией, при этом для выбора целевой области с наименьшим риском используется оценка безопасности для каждой возможной траектории. Сетка 20 предпочтительно постоянно обновляется при движении транспортного средства таким образом, чтобы непрерывно определять целевую область и целевую траекторию, что делает эти данные доступными сразу же при обнаружении столкновения. Сразу же после столкновения включается функция курсовой устойчивости для автономного руления в сторону целевой траектории. Если возможно, система курсовой устойчивости также может остановить транспортное средство в области назначения.
На Фиг. 3 изображен предпочтительный вариант устройства, соответствующего настоящему изобретению, которое включает в себя блок 50 мониторинга окружающих условий, оснащенный различными датчиками 51 для обнаружения заранее заданных типов угроз безопасности, присутствующих в возможных областях назначения вокруг транспортного средства. На основании входных сигналов от датчика, блок 50 мониторинга окружающих условий оценивает множество источников опасности, которые записываются в блок 52 рисков, а также сопоставляет их с соответствующими областями на сетке 20. На основании оценки источников опасности 52 на сетке 20 осуществляется выбор целевой области, которая затем передается на блок 53 определения траектории. В блоке 53 выполняется определение нескольких возможных траекторий 54 и связанных с ними угроз для безопасности на основании информации от датчиков 51 и нескольких датчиков 55 транспортного средства (которые могут быть использованы, например, для определения маневренности транспортного средства). Одна из возможных траекторий, которая имеет наименьший риск для безопасности, выбирается контроллером 56 послеаварийного определения траектории в качестве целевой траектории. Детектор удара 57, соединенный с контроллером 56, выдает сигнал срабатывания при обнаружении столкновения транспортного средства с другим объектом. Контроллер 56 не обрабатывает постоянно обновляемую информацию о целевой области до тех пор, пока не будет обнаружено столкновение. В этот момент контроллер 56 взаимодействует с блоком 58 курсовой устойчивости, запуская автономное руление транспортного средства по целевой траектории.
На Фиг. 4 представлен общий способ функционирования системы согласно настоящему изобретению, в котором на этапе 60 выполняется мониторинг окружающих условий транспортного средства с целью обнаружения заранее заданных типов угроз для безопасности. На этапе 61 областям на сетке назначаются значения рисков. На этапе 62 область с наименьшим риском для безопасности выбирается в качестве целевой области. На этапе 63 определяются все возможные траектории между транспортным средством и целевой областью, при этом в качестве безопасной траектории на этапе 64 выбирается траектория с наименьшим риском для безопасности.
На этапе 65 выполняется проверка, позволяющая определить, было ли обнаружено столкновение. Если столкновение не было обнаружено, то способ возвращается на этап 64 для непрерывного анализа окружающих условий транспортного средства, а также обновления целевой области и целевой траектории. На этапе 66 после обнаружения удара транспортное средство следует по безопасной траектории в автономном режиме (или помогает водителю следовать по данной траектории). Если исполнительный механизм системы курсовой устойчивости способен остановить транспортное средство в целевой области, то данное действие выполняется на этапе 67. После этапа 66 способ предпочтительно, возвращается на этап 60, где происходит непрерывный мониторинг окружающих условий для выбора целевой области и безопасной траектории, поскольку после столкновения ситуация может измениться.
На Фиг. 5 более подробно изображен вариант предпочтительного осуществления изобретения. Контроллер 70 послеаварийного определения траектории может быть соединен с датчиком 71 угловой скорости рыскания, датчиками 72 скорости (например, скорости транспортного средства и каждого колеса в отдельности), датчиком 73 бокового ускорения, датчиком 74 вертикального ускорения, датчиком 75 угловой скорости крена, датчиком 76 угла поворота рулевого колеса, датчиком 77 продольного ускорения, датчиком 78 скорости тангажа, датчиком 79 углового положения рулевого колеса и датчиком 80 нагрузки. Навигационная GPS-система с цифровой картой 81 также соединена с контроллером 70, который может быть использован как возможный источник информации об угрозах для безопасности (например, о местоположении неподвижных препятствий или рельефе местности). Информация об угрозах для безопасности от наземных источников также может быть получена по каналу 82 беспроводной связи, по которому контроллер 70 связывается с системами 83 связи между транспортными средствами (V2V) или с облачной инфраструктурой 84.
Также транспортное средство содержит пассивные системы безопасности 85 с множеством датчиков 86 обнаружения объектов, например, радиолокационные устройства, лидары или удаленные видеодетекторы. Системы безопасности 85 также включают в себя пассивные системы 87 противодействия, например, подушки безопасности, датчики 88 предупреждения столкновения (которые могут представлять собой такие датчики, как акселерометры, или могут представлять собой датчики, обозначенные ссылочными позициями 71-80) для управления системами 87 противодействия.
Система курсовой устойчивости, соответствующая настоящему изобретению, может включать в себя контроллер 90 тормоза, блок 99 управления двигателем или блок 99 управления трансмиссией (РСМ), контроллер 100 подвески и/или контроллер 101 рулевого управления. Из уровня техники известно, что контроллер 90 тормоза может раздельно управлять исполнительными механизмами 91-94 тормозов на разных колесах для обеспечения подруливания тормозами и полной остановки транспортного средства. Контроллер 90 тормозов предпочтительно может входить в состав других систем курсовой устойчивости, например, системы 95 ABS, системы 96 YSC, системы 97 TCS и системы 98 RSC.
В процессе работы наличие объектов и другие риски для безопасности, связанные с областью вокруг транспортного средства, обнаруживаются и отслеживаются датчиками 86 обнаружения объектов, а также наносятся на сетку контроллером 70. После обнаружения зоны с наименьшим риском контроллер 70 определяет возможные траектории для достижения целевой области путем анализа текущей скорости транспортного средства и максимального угла рыскания, например, для определения максимальной величины подруливания тормозами. При обнаружении датчиками 88 столкновения контроллер 70 активирует одно из средств поддержания курсовой устойчивости, например, контроллер 90 тормоза, для направления транспортного средства по выбранной траектории и возможной остановки в целевой области.
Кресло транспортного средства с системой климат-контроля
Активный буфер с камерой и облицовочной панелью, соединенными при формовании
Узел подрамника для соединения частей подвески, имеющей пару колес, с транспортным средством
Система подушки безопасности для транспортного средства
Способ оптимизации расхода топлива в транспортном средстве
Способ и устройство для определения интенсивности движения с помощью электронного контроллера, установленного в транспортном средстве
Осветительный прибор транспортного средства
Устройство для регулировки лампового узла транспортного средства
Дополнительное прикрепляемое приспособление для салона транспортного средства
Система управления закрывающей панелью транспортного средства
Способ изготовления шва с отбортовкой кромок
Устройство для улучшения вакуума в усилителе тормозов
Система управления и вычислений для транспортного средства
Транспортное средство, способ и система для планирования режимов транспортного средства с использованием изученных предпочтений пользователя

