Результат интеллектуальной деятельности: УСОВЕРШЕНСТВОВАННАЯ ЭЛЕКТРИЧЕСКАЯ КОНФИГУРАЦИЯ ДЛЯ ВИБРАЦИОННОГО ИЗМЕРИТЕЛЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Варианты реализации, описанные ниже, относятся к вибрационным измерителям и более конкретно к усовершенствованной электрической конфигурации для вибрационного измерителя.
УРОВЕНЬ ТЕХНИКИ
Вибрационные измерители, например вибрационные денситометры и расходомеры Кориолиса, хорошо известны и используются для измерения массового расхода и получения другой информации о материалах внутри трубопровода. Измеритель содержит сборку датчика и участок электроники. Материал внутри сборки датчика может быть текущим или может быть неподвижным. Каждый тип датчика может иметь уникальные характеристики, которые измеритель должен учитывать для достижения оптимальных рабочих параметров.
Примерные расходомеры Кориолиса раскрыты в патенте США 4109524, патенте США 4491025 и Re. 31450, все от J.E.Smith и др. Эти расходомеры имеют один или несколько трубопроводов прямой или изогнутой конфигурации. Каждая конфигурация трубопровода в массовом расходомере Кориолиса имеет набор собственных колебательных мод, которые могут быть простыми изгибными модами, крутильными модами или модами связанного типа. В каждом трубопроводе могут быть возбуждены колебания на предпочтительной моде.
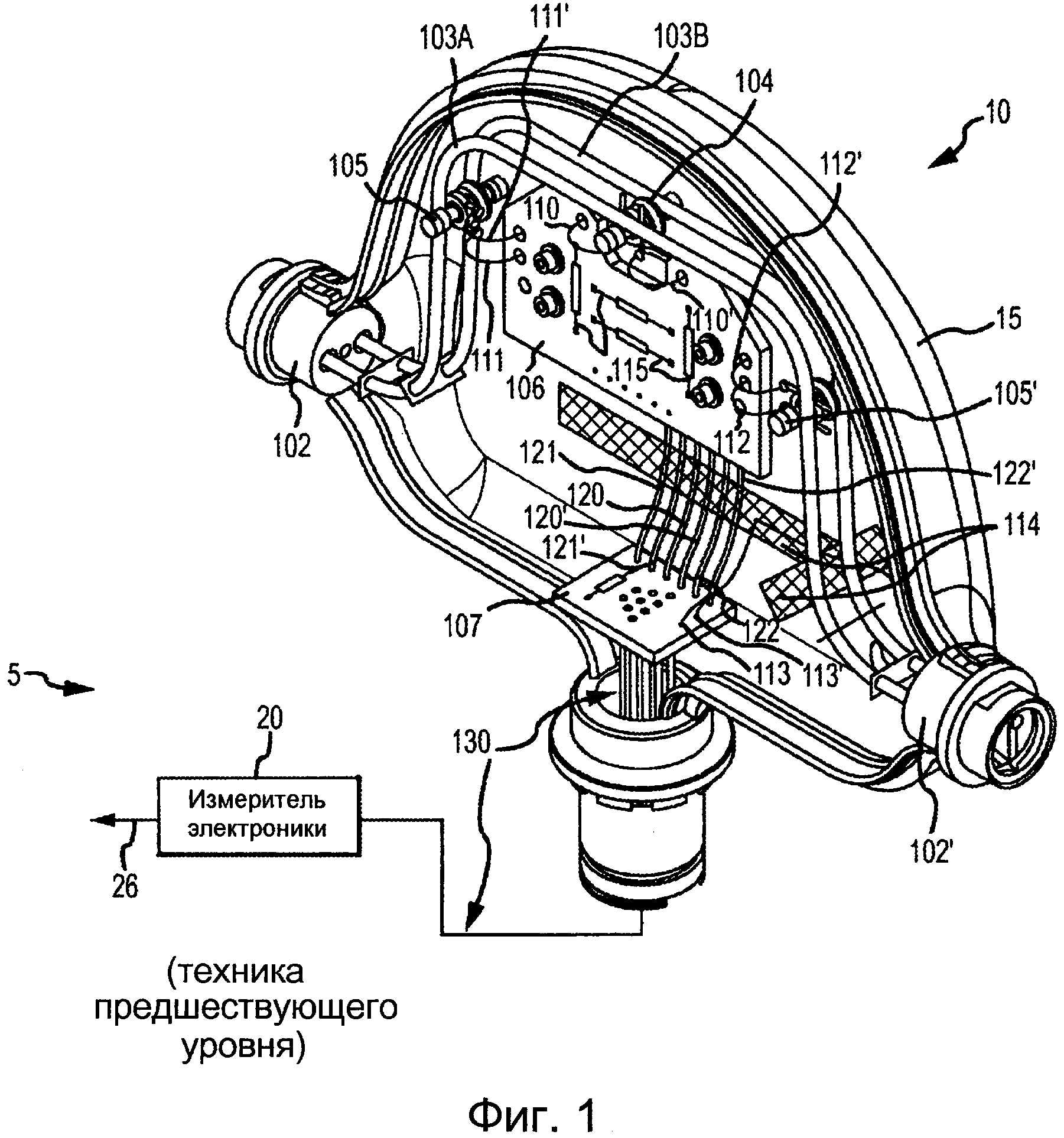
На фиг. 1 показана сборка 10 датчика техники предшествующего уровня. Сборка 10 датчика обычно электрически связана с измерителем электроники 20, формируя вибрационный измеритель 5. Хотя сборка 10 датчика описана ниже как содержащая участок расходомера Кориолиса, следует отметить, что сборка 10 датчика так же легко может быть использована как вибрационный измеритель другого типа. Сборка 10 датчика принимает текущий флюид; однако сборки датчика вибрационных измерителей не обязательно ограничены такой структурой, в которой анализируемый флюид течет. Поэтому сборка 10 датчика может содержать колеблющийся участок вибрационного денситометра, в котором флюид не течет, участок считывания ультразвуковых расходомеров, участок считывания магнитных объемных расходомеров и т. д.
Измерительная электроника может быть соединена со сборкой 10 датчика для измерения одного или нескольких параметров текущего материала, например плотности, массового расхода, объемного расхода, суммарного массового расхода, температуры, и для получения другой информации.
Передняя половина кожуха 15 сборки датчика на фиг. 1 удалена, чтобы показать внутренние компоненты. Сборка 10 датчика включает в себя пару манифольдов 102 и 102′ и расходомерные трубопроводы 103A и 103B. Манифольды 102, 102′ прикреплены к противоположным концам расходомерных трубопроводов 103A, 103B. Расходомерные трубопроводы 103A и 103B вытянуты наружу от манифольдов по существу параллельным образом. Когда сборка 10 датчика вставляется в трубопроводную магистраль (не показана), которая переносит текучий материал, материал входит в сборку 10 датчика через впускной манифольд 102, где суммарное количество материала направляется для входа в трубопроводы 103A, 103B, протекает через трубопроводы 103A, 103B и назад, в выпускной манифольд 102′, где материал выходит из сборки 10 датчика.
Сборка 10 датчика может включать в себя привод 104. Привод 104 показан как прикрепленный к расходомерным трубопроводам 103A, 103B в положении, где привод 104 может возбуждать колебания трубопроводов 103A, 103B на приводной моде, например. Привод 104 может содержать одну из многих, хорошо известных структур, например индукционную катушку, установленную на трубопроводе 103A, и противостоящий магнит, установленный на трубопроводе 103B. Приводной сигнал в виде переменного тока может быть предоставлен измерителем электроники 20, например, через первое и второе проводные соединения 110, 110′ и пропущен через катушку, чтобы возбудить колебания обоих трубопроводов 103A, 103B относительно изгибных осей W-W и W′-W′. Соединительные провода 110 и 110′ присоединяются к приводу 104 и к первой монтажной печатной плате (PCB) 106. Обычно соединительные провода присоединяются к первой PCB 106 и приводу 104 посредством пайки. Второй набор проводных соединений 120 и 120′ соединяет первую PCB со второй PCB 107. Вторая PCB 107 электрически связана с измерителем электроники с помощью проводного соединения 130. Показанная для привода 104 электрическая конфигурация техники предшествующего уровня требует четыре проводных соединения и две PCB 106 и 107, приводя к восьми паяным соединениям до выхода из кожуха 15 сборки датчика.
Сборка 10 датчика также включает в себя пару измерительных преобразователей 105, 105′, которые прикреплены к расходомерным трубопроводам 103A, 103B. В соответствии с вариантом реализации изобретения, измерительные преобразователи 105, 105′ могут быть электромагнитными детекторами, например измерительными магнитами и измерительными индукционными катушками, которые производят сигналы датчика, представляющие скорость перемещения и положение трубопроводов 103A, 103B. Например, измерительные преобразователи 105, 105′ могут подавать измерительные сигналы на измерительной электронике 20 по каналам 111, 111′, 112 и 112′, которые предоставляют канал электрической связи между измерительными преобразователями 105, 105′ и первой PCB 106. Второй набор проводных соединений 121, 121′, 122 и 122′ обеспечивает электрическую связь между первой и второй PCB 106 и 107 для измерительных преобразователей 105, 105′. Поэтому электрическая конфигурация требует восемь проводных соединений в общей сложности для шестнадцати паяных соединений для измерительных преобразователей 105, 105′ до выхода из кожуха 15 сборки датчика. Подаваемая на привод и получаемая от привода 104 и измерительных преобразователей 105, 105′, мощность может регулироваться, используя резисторы 115, которые показаны как связанные с первой PCB 106.
Дополнительно показаны соединительные провода 113, 113′ для устройства считывания температуры, например резистивного датчика температуры (RTD) (не показан), который соединяется со второй PCB 107. В некоторых сборках датчика техники предшествующего уровня соединительные провода также прикрепляются к кожуху 15 липкой лентой 114 или некоторым другим сцепляющим средством для ограничения движения соединений независимо от ориентации сборки датчика.
Специалистам в данной области техники должно быть ясно, что движение трубопроводов 103A, 103B пропорционально определенным параметрам текущего материала, например массовому расходу и плотности материала, текущего через расходомерные трубопроводы 103A, 103B.
В соответствии с вариантом реализации, измерительная электроника принимает измерительные сигналы от измерительных преобразователей 105, 105′. Канал 26 может предоставить входное и выходное средство, которое позволяет одному или нескольким измерительным электроникам 20 взаимодействовать с оператором. Измерительная электроника 20 может измерить один или несколько параметров анализируемого флюида, например разность фаз, частоту, временную задержку (разность фаз, деленная на частоту), плотность, массовый расход, объемный расход, суммарный массовый расход, температуру, верификацию измерителя, и предоставить другую информацию, как это хорошо известно в данной области техники.
Например, когда материал втекает в сборку 10 датчика из присоединенной трубопроводной магистрали на впускной стороне сборки 10 датчика, он направляется через трубопровод 103A, 103B и выходит из сборки 10 датчика через выпускную сторону датчика. Собственные колебательные моды колеблющейся и заполненной материалом системы отчасти определяются объединенной массой трубопроводов и материала, текущего внутри трубопроводов.
Когда поток через сборку датчика отсутствует, приводная сила, приложенная к трубопроводам 103A, 103B приводом 104, заставляет все точки вдоль трубопроводов 103A, 103B колебаться с одинаковой фазой или малым «нулевым смещением», которое является временной задержкой, измеряемой при нулевом потоке. Когда материал начинает течь через сборку датчика, силы Кориолиса приводят к тому, что каждая точка вдоль трубопровода(ов) имеет отличающуюся фазу. Например, фаза на впускном конце датчика отстает от фазы в центрированном положении привода, тогда как фаза при выпуске опережает фазу в центрированном положении привода. Измерительные преобразователи 105, 105′ на трубопроводах 103A, 103B производят синусоидальные сигналы, отображающие движения трубопроводов 103A, 103B. Сигналы, выводимые от измерительных преобразователей 105, 105′, обрабатываются для определения разности фаз между измерительными преобразователями 105, 105′. Разность фаз между этими двумя, или несколькими, измерительными преобразователями 105, 105′ пропорциональна массовому расходу материала, текущего через трубопроводы 103A, 103B.
Массовый расход материала может быть определен умножением разности фаз на Коэффициент Калибровки Расхода (FCF). До установки сборки 10 датчика расходомера в трубопроводную магистраль значение FCF определяется процессом калибровки. В процессе калибровки флюид пропускается через расходомерные трубопроводы 103A, 103B при известном расходе и рассчитывается соотношение между разностью фаз и расходом (то есть FCF). Сборка 10 датчика расходомера 5 затем определяет расход, умножая значение FCF на разность фаз измерительных преобразователей 105, 105′. Кроме того, при определении расхода могут быть учтены другие калибровочные коэффициенты.
Отчасти вследствие высокой точности вибрационных измерителей и, в частности, расходомеров Кориолиса вибрационные измерители успешно применяются в самых разнообразных областях промышленности. Однако, как отмечено выше, электрическая конфигурация сборки датчика для связи с приводом 104 и измерительными преобразователями 105, 105′ требует очень большого количества соединительных проводов и паяных соединений. Паяное соединение обычно ограничивает температурный диапазон, в котором сборка датчика может функционировать. Кроме того, поскольку каждый соединительный провод обычно отрезается и спаивается индивидуально вручную, сборки датчика оказываются значительно различающимися одна от другой. Другая проблема с электрической конфигурацией техники предшествующего уровня заключается в том, что соединительные провода от первой PCB 106 к приводу 104 и к измерительным преобразователям 105, 105′ оказываются подвержены значительному натяжению, которое часто приводит к преждевременному выходу из строя системы. Если рвется отдельный соединительный провод, то обычно оказывается неработоспособной и вся сборка 10 датчика.
Варианты реализации, описанные ниже, преодолевают эти и другие проблемы, и достигается усовершенствование в данной области техники. Варианты реализации, описанные ниже, предоставляют улучшенную электрическую конфигурацию для сборки датчика, которая приводит к более дешевой, более эффективной и более надежной сборке датчика. Усовершенствованная сборка датчика использует гибкую плату, а не твердую PCB с различными соединительными проводами. Кроме того, в некоторых вариантах реализации гибкая плата может выдерживать повышенные температуры в отличие от техники предшествующего уровня, где соединительные провода припаиваются к компонентам датчика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с вариантом реализации предоставляется сборка датчика для вибрационного измерителя. Сборка датчика содержит один или несколько трубопроводов и один или несколько компонентов датчика, включая в себя одно или несколько из привода, первого измерительного преобразователя и второго измерительного преобразователя, связанных с одним или несколькими трубопроводами. В соответствии с вариантом реализации, сборка датчика дополнительно включает в себя гибкую плату. Гибкая плата включает в себя основную часть и один или несколько гибких элементов компонент датчика, отходящих от основной части и связанных с компонентом датчика из одного или нескольких компонентов датчика.
В соответствии с вариантом реализации предоставляется способ для монтажа сборки датчика. Способ содержит этапы размещения одного или нескольких трубопроводов в пределах кожуха и связывания одного или нескольких компонентов датчика с одним или несколькими трубопроводами, компонентов датчика, включающих в себя одно или несколько из привода, первого измерительного преобразователя и второго измерительного преобразователя. В соответствии с вариантом реализации, способ дополнительно содержит этап размещения гибкой платы в пределах кожуха. В соответствии с вариантом реализации, способ дополнительно содержит этап связывания одного или нескольких гибких элементов компонент датчика, отходящих от основной части гибкой платы к компоненту датчика для одного или нескольких компонентов датчика.
ОБЪЕКТЫ
В соответствии с объектом сборка датчика для вибрационного измерителя содержит:
один или несколько трубопроводов;
один или несколько компонентов датчика, включающих в себя одно или несколько из привода, первого измерительного преобразователя и второго измерительного преобразователя, связанных с одним или несколькими трубопроводами; и
гибкую плату, включающую в себя:
основную часть; и
один или несколько гибких элементов компонента датчика, отходящих от основной части и связанных с компонентом датчика для одного или нескольких компонентов датчика.
Предпочтительно гибкая плата обеспечивает электрическую связь между измерителем электроники и одним или несколькими компонентами датчика.
Предпочтительно каждый из гибких элементов компонент датчика включает в себя, по меньшей мере, одну апертуру связи, приспособленную для приема, по меньшей мере, участка контактного штырька компонента датчика.
Предпочтительно сборка датчика дополнительно содержит компенсатор деформации, связанный с гибким элементом компонент датчика так, что участок гибкого элемента, связанного с компенсатором деформации, и апертура связи остаются по существу неподвижными относительно друг друга.
Предпочтительно компенсатор деформации связан с компонентом датчика.
Предпочтительно компенсатор деформации содержит пластину, связанную с кронштейном трубопровода компонента датчика, по меньшей мере, с участком гибкого элемента компонента датчика, установленного между пластиной и кронштейном трубопровода.
Предпочтительно сборка датчика дополнительно содержит трубчатую заклепку, принимаемую в каждой из апертур связи гибкого элемента компонента датчика.
Предпочтительно трубчатая заклепка, принимаемая в апертурах связи, дополнительно связана с контактным штырьком компонента датчика.
Предпочтительно каждый из гибких элементов компонента датчика содержит одно или несколько электрических соединений.
Предпочтительно сборка датчика дополнительно содержит резервный гибкий элемент, связанный, по меньшей мере, с одним гибким элементом компонента датчика.
Предпочтительно каждый из гибких элементов компонента датчика содержит первичное электрическое соединение и резервное электрическое соединение.
В соответствии с другим объектом способ для монтажа сборки датчика содержит этапы:
размещения одного или нескольких трубопроводов в пределах кожуха;
связывания одного или нескольких компонентов датчика с одним или несколькими трубопроводами, компонентов датчика, включающих в себя одно или несколько из привода, первого измерительного преобразователя и второго измерительного преобразователя;
размещения гибкой платы в пределах кожуха; и
связывания одного или нескольких гибких элементов компонента датчика, отходящих от основной части гибкой платы к компоненту датчика для одного или нескольких компонентов датчика.
Предпочтительно способ дополнительно содержит связывание гибкой платы с измерителем электроники для обеспечения электрической связи между измерителем электроники и одним или несколькими компонентами датчика.
Предпочтительно этап связывания одного или нескольких гибких элементов компонента датчика содержит вставление контактного штырька компонента датчика, простирающегося от компонента датчика в апертуру связи, сформированную в гибком элементе компонента датчика.
Предпочтительно способ дополнительно содержит этап связывания гибкого элемента компонента датчика с компенсатором деформации так, что участок гибкого элемента компонента датчика, связанного с компенсатором деформации, и апертура связи остаются по существу неподвижными относительно друг друга во время колебаний одного или нескольких трубопроводов.
Предпочтительно компенсатор деформации связан с компонентом датчика.
Предпочтительно компенсатор деформации содержит пластину, и этап связывания гибкого элемента компонента датчика с компенсатором деформации содержит размещение участка гибкого элемента компонента датчика между пластиной и кронштейном трубопровода компонента датчика.
Предпочтительно способ дополнительно содержит этап вставления трубчатой заклепки в каждую из апертур связи, сформированных в гибком элементе компонента датчика.
Предпочтительно способ дополнительно содержит этап связывания трубчатой заклепки с контактным штырьком компонента датчика.
Предпочтительно каждый из гибких элементов компонента датчика содержит одно или несколько электрических соединений.
Предпочтительно гибкая плата дополнительно содержит резервный гибкий элемент, связанный, по меньшей мере, с одним гибким элементом компонента датчика.
Предпочтительно каждый из гибких элементов компонента датчика содержит первичное электрическое соединение и резервное электрическое соединение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает сборку датчика техники предшествующего уровня.
Фиг. 2 - сборка датчика для вибрационного измерителя в соответствии с вариантом реализации.
Фиг. 3 - гибкая плата, связанная с компонентом датчика сборки датчика в соответствии с вариантом реализации.
Фиг. 4 - гибкая плата, связанная с компонентом датчика в соответствии с другим вариантом реализации.
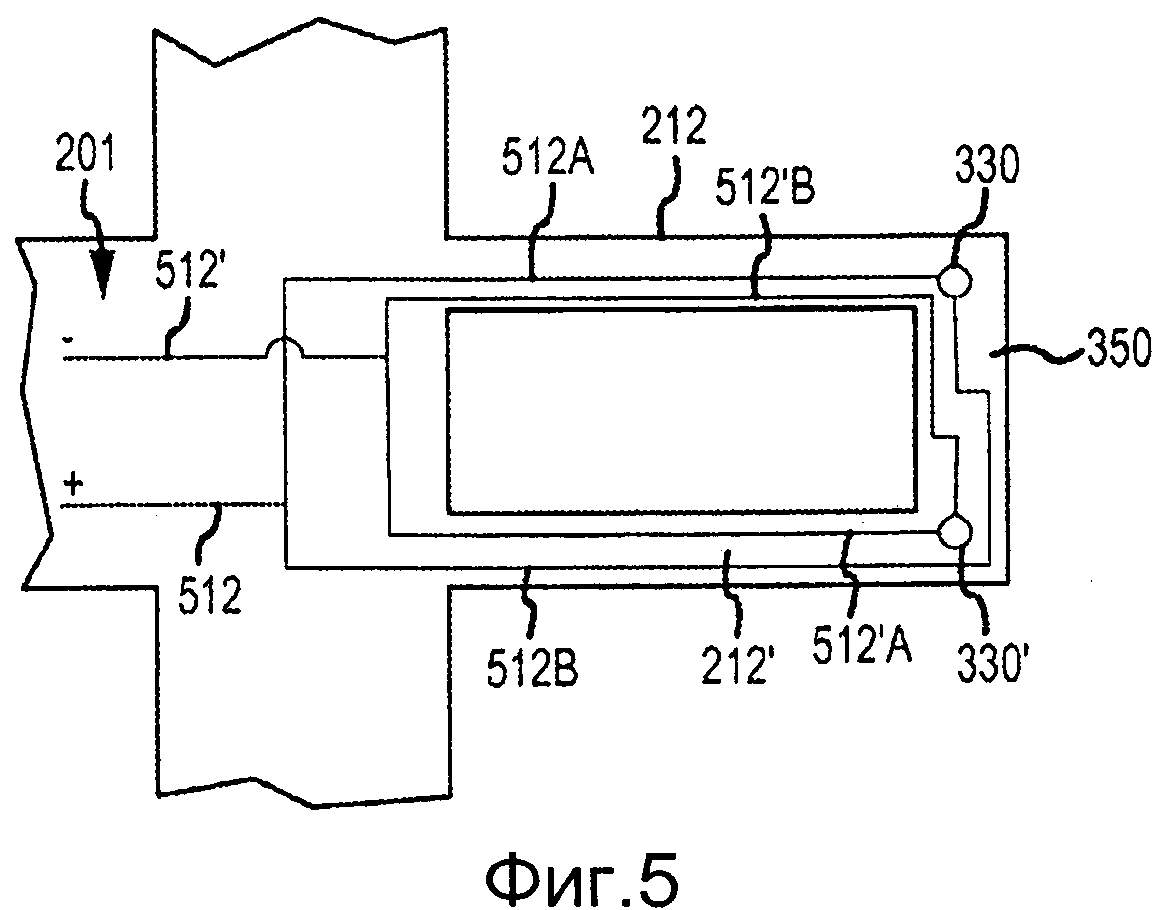
Фиг. 5 - гибкий элемент компонента датчика гибкой платы в соответствии с вариантом реализации.
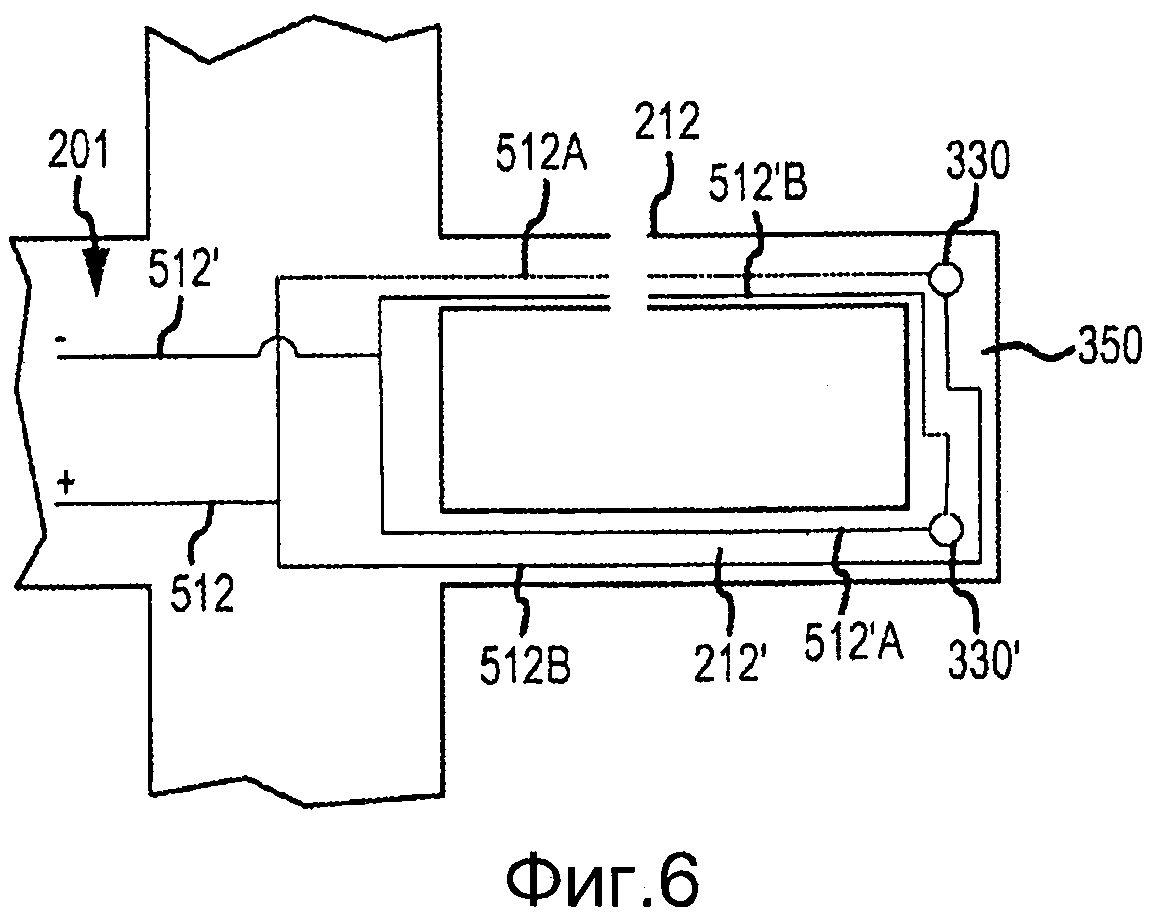
Фиг. 6 - гибкий элемент компонента датчика гибкой платы в соответствии с другим вариантом реализации.
Фиг. 7 - вид сечения гибкого элемента, связанного с контактным штырьком индукционной катушки, используя трубчатую заклепку в соответствии с вариантом реализации.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Чертежи на фиг. 2-7 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант из вариантов реализации системы управления расходом. С целью пояснения принципов изобретения некоторые обычные объекты были упрощены или исключены. Специалисты в данной области техники увидят возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Специалисты в данной области техники увидят, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации системы управления расходом. Таким образом, описываемые ниже варианты реализации не ограничиваются описываемыми ниже конкретными примерами, но только пунктами формулы и их эквивалентами.
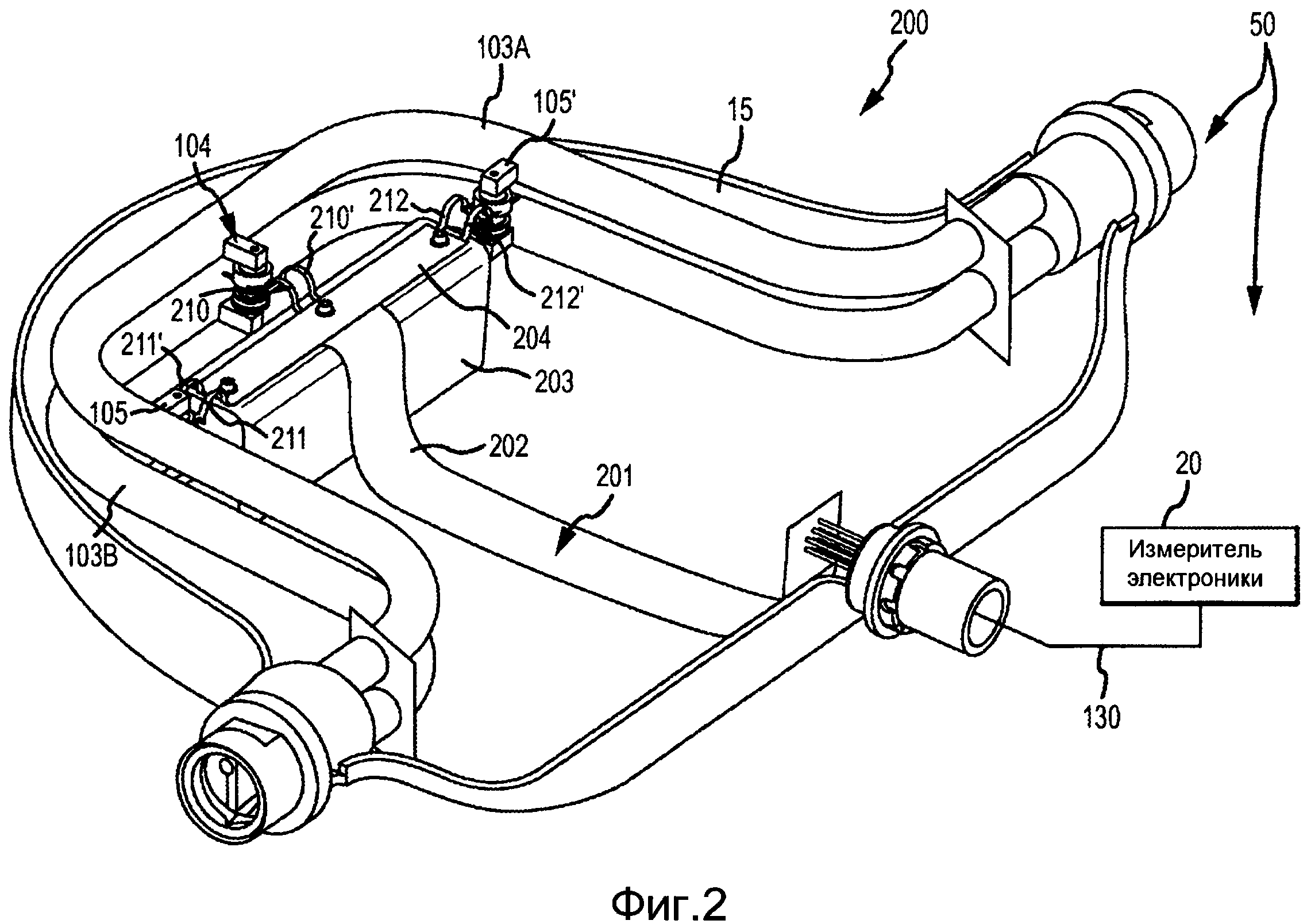
На фиг. 2 показан вибрационный измеритель 50, включающий в себя измерительную электронику 20 и сборку 200 датчика в соответствии с вариантом реализации. Общие цифровые обозначения используются для компонентов сборки 200 датчика, которая также содержит компоненты сборки 10 датчика техники предшествующего уровня. Показанный на фиг. 2 вариант реализации имеет удаленную переднюю половину кожуха 15, чтобы показать внутренние компоненты. Как можно видеть, сборка 200 датчика имеет удаленные и первую, и вторую PCB 106, 107, так же как и соединительные провода. Вместо этого компоненты датчика связаны с гибкой платой 201, иногда обозначаемой в данной области техники как "пластиковая электроника". В соответствии с вариантом реализации компоненты датчика электрически связаны с измерителем электроники 20 через гибкую плату 201. Компоненты датчика могут включать в себя одно или несколько из привода 104, измерительных преобразователей 105, 105′ и RTD (не показан), например. В соответствии с вариантом реализации, гибкая плата 201 может быть сформирована как компонента, состоящая из одной детали. Гибкая плата 201 может включать в себя основную часть 202 и один или несколько гибких элементов 210-212′ компонента датчика, отходящих от основной части 202. Гибкая плата 201 может обмениваться информацией между кабелем 130 и компонентами датчика. Поэтому в некоторых вариантах реализации гибкая плата 201 может быть связана с множеством кабелей 130. Кабели 130 могут обеспечить канал электрической связи между гибкой платой 201 и измерителем электроники 20, например. Альтернативно кабели 130 могут быть устранены, и гибкая плата 201 может простираться из кожуха 15 до измерительной электроники 20. Поэтому гибкая плата 201 предоставляет электрическую связь между компонентами датчика и устройствами, внешними для сборки 200 датчика, например измерителем электроники 20. Следовательно, гибкая плата 201 заменяет соединительные провода 110-122′ наряду с двумя PCB 106, 107 сборки 10 датчика из техники предшествующего уровня.
В соответствии с вариантом реализации, гибкая плата 201 может содержать гибкий плоский кабель, ленточный кабель и т. д. Гибкая плата 201 может содержать одну или несколько тонких, гибких, изолирующих подложек, например, из полиэтилена, полиэтилен-терефталата (PET) или некоторого другого пластикового или изолирующего материала, известного в данной области техники. Гибкая плата 201 может содержать множество электрических соединений (см. фиг. 5 и 6). Электрические соединения могут содержаться в пределах двух изолирующих гибких подложек, то есть быть зажатыми между двумя слоями гибкой подложки. Известен обычный вариант гибкой платы с металлическими соединениями, клееными, ламинированными, травленными и т. д. на плоской и гибкой пластиковой подложке. Металлические соединения могут содержать медные пленки, изготовленные фототравлением, или осажденные медные пленки, или некоторый другой материал, общеизвестный в данной области техники, который может быть использован в качестве электрического соединения для передачи питания, сигналов и/или для соединения с землей. Конкретная конфигурация гибкой платы 201 может варьироваться в зависимости от числа требуемых электрических соединений и конкретной конфигурации. Поэтому показанная на фиг. 2 конкретная конфигурация никоим образом не должна ограничивать объем притязаний настоящего варианта реализации.
В отличие от твердой PCB гибкая плата 201 эластична и может быть деформирована или как-то иначе изогнута для приспособления к различным конфигурациям. Поэтому гибкая плата 201 может значительно снизить напряжения, наблюдающиеся в электрической конфигурации техники предшествующего уровня.
В соответствии с вариантом реализации, сборка 200 датчика может дополнительно включать в себя монтажный блок 203. В соответствии с вариантом реализации, по меньшей мере, участок гибкой платы 201 может быть установлен на монтажном блоке 203. Более определенно участок основной части 202 гибкой платы 201 может быть установлен на монтажном блоке 203. Гибкая плата 201 может удерживаться на монтажном блоке 203, используя монтажную пластину 204 или подобное устройство. В соответствии с вариантом реализации, участок основной части 202 может быть установлен на монтажном блоке 203, чтобы по существу сцентрировать гибкую плату 201 относительно кожуха 15, например. Например, монтажный блок 203 может быть предоставлен для центрирования участка гибкой платы 201 между двумя трубопроводами 103A, 103B.
В соответствии с вариантом реализации, гибкая плата 201 может быть связана с компонентами 104, 105, 105′ датчика, используя множество гибких элементов компонента датчика. В показанном варианте реализации, гибкая плата 201 связана с приводом 104, используя первый и второй гибкие элементы 210, 210′ привода. Аналогично гибкая плата 201 связана с измерительными преобразователями 105, 105′, используя первый и второй гибкие элементы 211, 211′ и 212, 212′ измерительных преобразователей соответственно. Гибкие элементы могут содержать такую же конфигурацию, что и основная часть 202 гибкой платы 201. Однако гибкие элементы могут быть ограничены относительно включения в себя электрических соединений для конкретного связываемого компонента датчика, хотя основная часть 202 может включать в себя по существу все требуемые электрические соединения. В соответствии с вариантом реализации, гибкие элементы могут содержать интегральные компоненты к основной части 202 гибкой платы 201. Как показано, гибкие элементы могут быть отходящими от основной части 202. Поэтому гибкие элементы не требуют отдельных паяных соединений, как это требуется для проводных соединений и PCB для сборки 10 датчика техники предшествующего уровня. Вместо этого гибкие элементы только должны быть связаны с соответствующим компонентом датчика. Гибкие элементы могут предоставить и физическую и электрическую связь между гибкой платой 201 и компонентами датчика. Как можно заметить, в отличие от проводных соединений техники предшествующего уровня, которые восприимчивы к различиям в длине, поскольку соединительные провода припаиваются к компонентам датчика и PCB, гибкие элементы могут содержать интегральный компонент гибкой платы 201. Гибкая плата 201, включающая в себя гибкие элементы, может быть сформирована воспроизводимым образом, по существу с однородным размером и длиной от одной гибкой платы до другой.
Следует отметить, хотя и не показано на фиг. 2, что в некоторых вариантах реализации гибкая плата 201 может включать в себя множество электрических резисторов, подобных резисторам 115, показанным на фиг. 1, для регулировки подаваемой на компоненты датчика мощности.
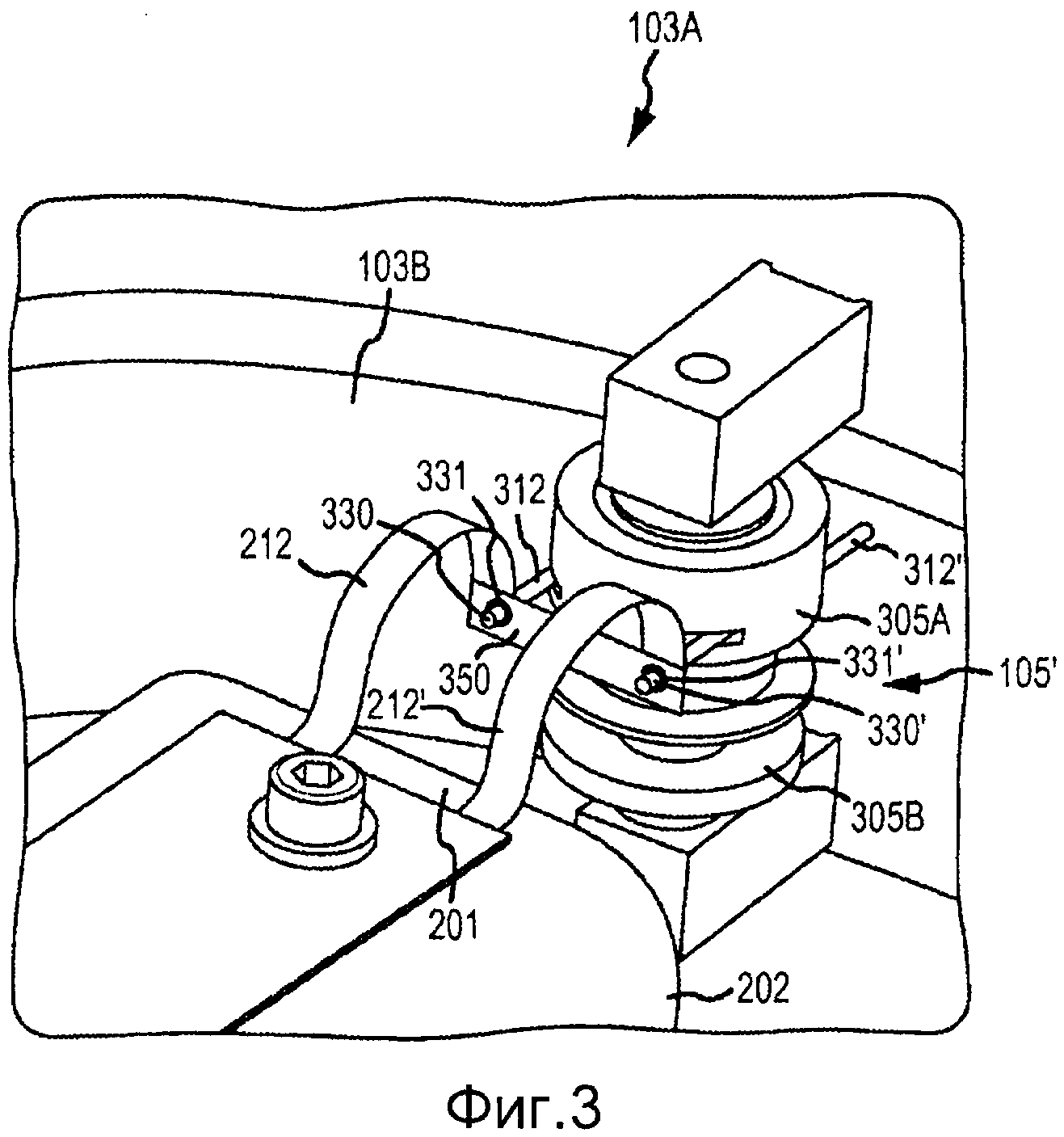
На фиг. 3 показан более подробный вид связывания между гибкой платой 201 и компонентом датчика. В показанном на фиг. 3 варианте реализации компонент датчика содержит второй измерительный преобразователь 105′. Однако следует отметить, что подобные связывания могут быть выполнены с другими компонентами датчика, то есть с приводом 104, с первым измерительным преобразователем 105 и с RTD.
В соответствии с показанным вариантом реализации измерительный преобразователь 105′ содержит структуру катушка/магнит с катушкой 305A измерительного преобразователя, связанной с первым расходомерным трубопроводом 103A, и магнитом 305B измерительного преобразователя, связанным со вторым расходомерным трубопроводом 103B. Однако следует отметить, что могут быть использованы другие типы приводов и измерительных преобразователей, например оптические, пьезоэлектрические и т. д. Поэтому описанные варианты реализации не должны быть ограничены компонентами электромагнитного датчика; в действительности структуры катушка/магнит упомянуты в настоящем описании для поддержания целостности изложения.
Как показано, первый и второй гибкие элементы 212, 212′ измерительных преобразователей связаны с первым и вторым контактными штырьками 312, 312′ компонента датчика. Поэтому связывание первого и второго гибких элементов 212, 212′ измерительных преобразователей заменяет связывание проводных соединений 112, 112′ с первым и вторым контактными штырьками 312, 312′ индукционной катушки, как это выполнено в показанной на фиг. 1 сборке 10 датчика техники предшествующего уровня. В соответствии с вариантом реализации связывание между первой и второй гибкими элементами 212, 212′ измерительных преобразователей и первым и вторым контактными штырьками 312, 312′ может быть достигнуто спаиванием гибких элементов 212, 212′ с первым и вторым контактными штырьками 312, 312′. Более конкретно гибкие элементы 212, 212′ могут включать в себя апертуры 330, 330′ связи, которые имеют размер и форму для приема, по меньшей мере, участка первого и второго контактных штырьков 312, 312′ индукционной катушки 305A. Апертуры 330, 330′ связи могут содержать электрически проводящие участки, которые позволяют осуществить необходимую электрическую связь между соединениями (см. фиг. 5 и 6) первого и второго гибких элементов 212, 212′ и первого и второго контактных штырьков 312, 312′ индукционной катушки 305A. Однако специалисты в данной области техники легко смогут увидеть альтернативные конфигурации. Связывание между гибкими элементами 212, 212′ и контактными штырьками 312, 312′ обеспечивает электрическую, а также и физическую связь между гибкой платой 201 и измерительным преобразователем 105′.
Хотя спаивание может обеспечить достаточное связывание при некоторых обстоятельствах, как отмечено выше, в некоторых приложениях, с более высокой температурой, спаянные соединения могут оказаться ненадежными, поскольку спаивающий материал может плавиться. Поэтому в некоторых ситуациях припаивание контактных штырьков 312, 312′ индукционной катушки непосредственно к гибким консолям 212, 212′ может привести к ограниченному температурному диапазону использования сборки 200 датчика. Поэтому в соответствии с вариантом реализации гибкие элементы 212, 212′ могут быть предоставлены с трубчатыми заклепками 331, 331′. Трубчатые заклепки 331, 331′ показаны на фиг. 3 как окружающие апертуры 330, 330 связи и более детально они показаны в виде сечения на фиг. 7.
В соответствии с вариантом реализации первый и второй гибкие элементы 212, 212′ также связаны один с другим через резервный гибкий элемент 350. Резервный гибкий элемент 350 может создать резервную цепь, как объясняется более подробно ниже. Резервный гибкий элемент 350 обеспечивает замкнутую электрическую цепь даже в случае, когда один из гибких элементов 212, 212′ ломается.
Показанная на фиг. 3 конфигурация уменьшает напряжение, приложенное к спаянному соединению, по сравнению с ситуацией техники предшествующего уровня. Гибкие элементы 212, 212′ более надежны, чем соединительные провода техники предшествующего уровня, поскольку гибкие элементы 212, 212′ могут распределять нагрузку, вызываемую вибрацией, более эффективно, чем соединительные провода техники предшествующего уровня, тем самым уменьшая напряжение, создаваемое при колебании расходомерных трубопроводов 103A, 103B. Дополнительно гибкие элементы 212, 212′ содержат интегрально сформированный участок гибкой платы 201, что приводит к более однородным и восстанавливаемым длинам для гибких элементов 212, 212′, чем это было возможно для независимых соединительных проводов, показанных на фиг. 1. Это может уменьшить напряжение по сравнению со случаем соединительных проводов техники предшествующего уровня, поскольку, если соединительные провода техники предшествующего уровня оказываются слишком короткими, приводя к изгибам малых радиусов, то паяное соединение испытывает повышенное напряжение во время колебаний. Гибкие элементы 212, 212′ гибкой платы 201 могут также уменьшить риск образования петель, наблюдавшихся в соединительных проводах техники предшествующего уровня, которые часто приводят к концентрации напряжений в соединительном проводе. Однако, хотя показанные на фиг. 3 гибкие элементы 212, 212′ уменьшают физическое напряжение на спаянных соединениях, спаянные соединения могут все же испытывать некоторое напряжение для сохранения первого и второго контактов 312, 312′ в пределах апертур 330, 330′ связи, когда трубопроводы 103A, 103B колеблются.
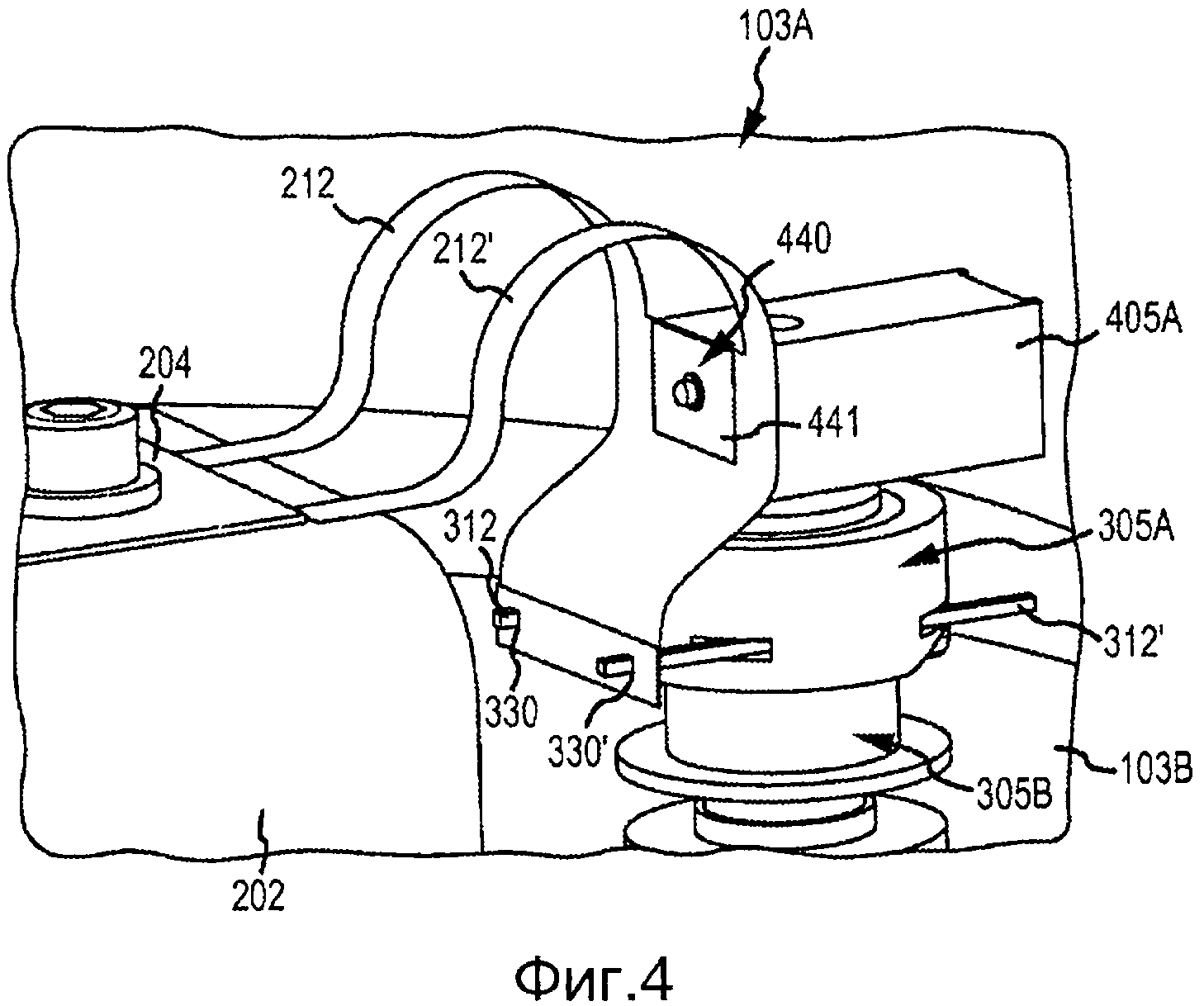
На фиг. 4 показаны гибкие элементы 212, 212′, связанные с компонентом датчика в соответствии с другим вариантом реализации. В показанном на фиг. 4 варианте реализации гибкие элементы 212, 212′ связаны с компенсатором 440 деформации. В соответствии с вариантом реализации компенсатор 440 деформации может содержать участок индукционной катушки 305A. Более конкретно компенсатор 440 деформации может быть сформирован на кронштейне 405A трубопровода катушки 305A. В соответствии с другим вариантом реализации компенсатор 440 деформации может быть связан с участком катушки 305A. В показанном варианте реализации компенсатор 440 деформации связан с резервным гибким элементом 350, который соединяет гибкие элементы 212, 212′. Резервный гибкий элемент 350 показан в варианте реализации на фиг. 4 как несколько больший, чем в варианте реализации, показанном на фиг. 3, чтобы приспособить компенсатор 440 деформации. Однако компенсатор 440 деформации не должен быть связан с резервным гибким элементом 350 и может быть связан с первым и вторым гибкими элементами 212, 212′. Компенсатор деформации, как показано на фиг. 4, не был выполнимым в технике предшествующего уровня, поскольку контакт с соединительными проводами мог приводить к короткому замыканию. Однако гибкая плата 201 содержит изолирующую подложку, которая может предотвратить, или существенно снизить, риск короткого замыкания. Следовательно, компенсатор 440 деформации может быть использован.
С компенсатором 440 деформации, связанным с гибкими элементами 212, 212′, паяные соединения в апертурах 330, 330′ связи и первом и втором контактных штырьках 312, 312′ индукционной катушки испытывают значительно сниженную деформацию. Это так потому, что, когда расходомерные трубопроводы 103A, 103B колеблются, относительное положение между компенсатором 440 деформации и контактами 312, 312′ остается фиксированным. Иначе говоря, относительное положение участка гибких элементов 212, 212′, связанных с компенсатором 440 деформации и первым и вторым контактами 312, 312′, остается по существу постоянным, даже во время колебаний трубопроводов 103A, 103B. Следовательно, во время колебаний связь между апертурами 330, 330′ связи и первым и вторым контактными штырьками 312, 312′ не подвергается растяжению или любому другому типу деформации. Вернее, растяжение и деформация возникает между компенсатором деформации и монтажной пластиной 204. Как можно заметить, поскольку гибкие элементы 212, 212′ содержат часть гибкой платы, которая может испытывать деформацию, колебания и слишком большие перемещения легко согласовываются.
В соответствии с показанным вариантом реализации компенсатор 440 деформации содержит пластину 441, которая может быть связана с кронштейном 405A трубопровода компонента 305A датчика с гибкими элементами 212, 212′, и более конкретно резервный гибкий элемент 350, зажатый между пластиной 441 и кронштейном 405A трубопровода. Хотя показана единственная пластина 441, следует отметить, что в других вариантах реализации гибкие элементы 212, 212′ могут не присоединяться к резервному гибкому элементу 350 и, таким образом, могут быть предоставлены множественные пластины. Кроме того, хотя компенсатор 440 деформации для описываемого в данном случае варианта реализации использует пластину 441, следует отметить, что могут быть использованы другие конфигурации для связывания участка гибких элементов 212, 212′ с кронштейном 405A трубопровода. Например, резервный гибкий элемент 350 может быть связан с кронштейном 405A трубопровода, используя связующее вещество, зажим, выступ и соответствующую апертуру, и т. д. Предпочтительно, чтобы компенсатор 440 деформации мог бы продлить долговечность сборки 200 датчика и, в частности, долговечность связи между гибкой платой 201 и различными компонентами датчика.
Как упомянуто кратко выше, гибкая плата 201 настоящего варианта реализации может включать в себя резервную схему. Резервная схема позволяет подавать питание, сигналы и/или соединение с землей между измерителем электроники 20 и компонентами датчика, даже если один из гибких элементов для компонента датчика ломается.
На фиг. 5 показан вид сечения гибких элементов 212, 212′ в соответствии с вариантом реализации. Как показано на фиг. 5, гибкая плата 201 включает в себя два электрических соединения 512 и 512′. Электрические соединения 512, 512′ могут обеспечить электрическую связь между компонентом датчика, например, измерительным преобразователем 105′, и измерителем электроники 20. В некоторых вариантах реализации электрические соединения 512, 512′ могут обеспечить электрическую связь между компонентом датчика и другим промежуточным электрическим компонентом, например кабельным соединением 130. Поэтому, хотя показаны только два электрических соединения 512, 512′, специалисты в данной области техники легко увидят, что два или более соединений могут быть предоставлены для каждого из компонентов датчика, связанных с гибкой платой 201.
В соответствии с показанным вариантом реализации одно из электрических соединений может содержать опорное напряжение, например, одно соединение имеет потенциал земли, и другое электрическое соединение может находиться под некоторым напряжением, отличным от опорного напряжения, как обозначено знаками "+" и "-". Как показано, оба электрических соединения 512, 512′ проходят через каждый из гибких элементов 212, 212′, так же как и резервный гибкий элемент 350. Первое электрическое соединение 512 разделяется на первичное соединение 512A, которое проходит через гибкий элемент 212, и резервное соединение 512B, которое проходит через гибкий элемент 212′ и резервный гибкий элемент 350 для обеспечения электрической связи с первой апертурой 330 связи. Аналогично второе электрическое соединение 512′ разделяется на первичное электрическое соединение 512′, которое проходит через гибкий элемент 212′, и резервное электрическое соединение 512′B, которое проходит через гибкий элемент 212 и резервный гибкий элемент 350 для обеспечения электрической связи со второй апертурой 330′ связи. Как должно быть ясно специалистам в данной области техники, питание и/или сигналы могут проходить или из каждого, или из обоих - первичного первого электрического соединения 512A и резервного первого электрического соединения 512B к первой апертуре 330 связи. С электрическим контактом 312 индукционной катушки 305, связанной с первой апертурой 330 связи, питание может течь через катушку 305A ко второй апертуре 330′ связи. Первичное второе электрическое соединение 512′A и/или резервное второе электрическое соединение 512′B может замыкать цепь.
На фиг. 6 показан участок гибкой платы 201 в соответствии с другим вариантом реализации. В показанном на фиг. 6 варианте реализации был разорван первый гибкий элемент 212. Гибкий элемент 212 может быть разорван по ряду причин. Как можно заметить, если соединительный провод 112 сборки 10 датчика техники предшествующего уровня отрывается подобным образом от гибкого элемента 212, ни питание, ни сигнал не могут быть переданы на измерительный преобразователь 105′. Однако поскольку соединения 512, 512′ проходят через оба гибких элемента 212, 212′, а не только через один из гибких элементов 212, 212′, разорванный гибкий элемент 212 не нарушает подачу питания и/или сигналов на измерительный преобразователь 105′, поскольку другой гибкий элемент может обеспечить канал электрической связи. С первым разорванным гибким элементом 212 питание и/или сигналы могут быть переданы через резервное первое электрическое соединение 512B и первичное второе электрическое соединение 512′A. Поэтому показан вариант реализации, который включает в себя резервный гибкий элемент 350, создающий резервную цепь, чтобы позволить непрерывное использование после того, как один из гибких элементов разрывается. Следовательно, компонент датчика может сообщаться с измерителем электроники 20 с единственным гибким элементом 212 или 212′ и резервным гибким элементом 350.
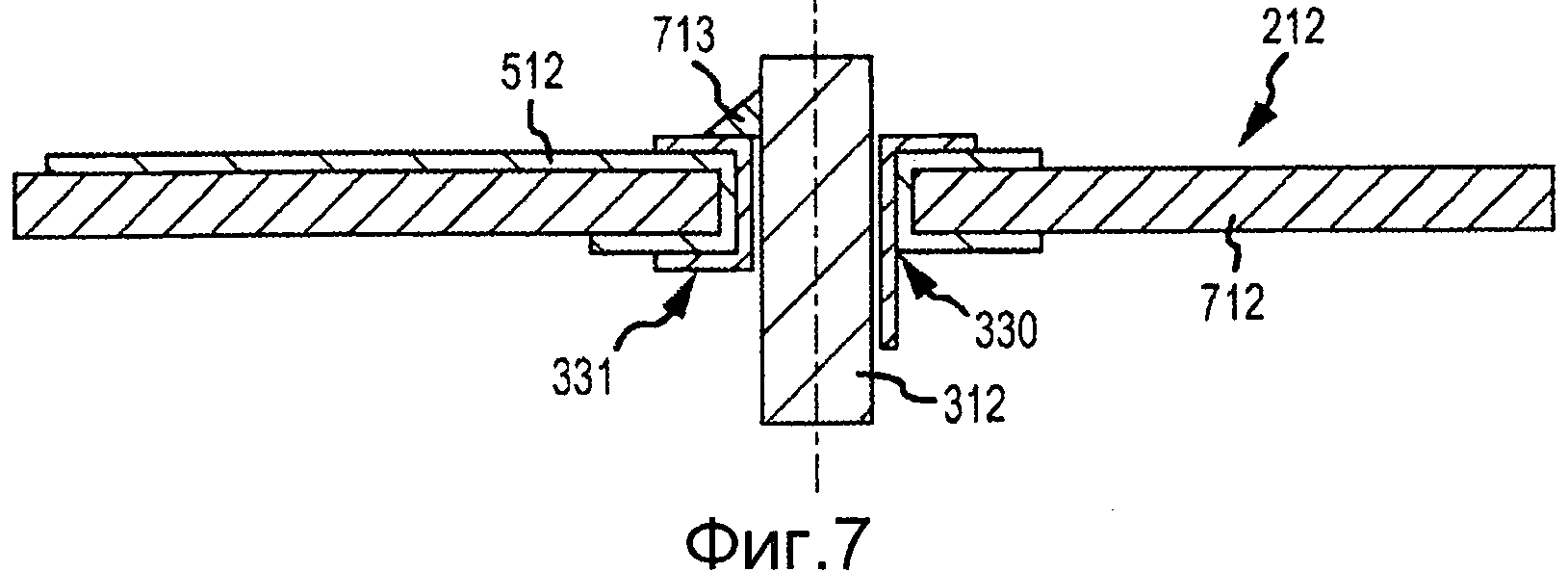
На фиг. 7 показан вид сечения контактного штырька 312 индукционной катушки, принятый апертурой 330 связи в соответствии с вариантом реализации. Хотя вид сечения показывает только единственную гибкую подложку 712, следует отметить, что, как рассмотрено выше, электрическое соединение 512 может быть зажатым между двумя гибкими подложками. Как отмечено выше, в некоторых вариантах реализации припаивание соединений 512, 512′ непосредственно к контактным штырькам 312, 312′ катушки может ограничить температурный диапазон работы сборки 200 датчика, поскольку пайка может плавиться ниже требуемой рабочей температуры. Однако использование методик связывания с большим нагревом непосредственно на электрических соединениях 512, 512′ может вызвать необратимое повреждение соединений 512, 512′. Следовательно, в соответствии с вариантом реализации сборка 200 датчика может использовать трубчатые заклепки 331, 331′. Трубчатая заклепка 331 показана на фиг. 7; однако следует отметить, что подобные трубчатые заклепки могут быть предоставлены для каждой из апертур связи гибкой платы 201.
В соответствии с вариантом реализации по меньшей мере, участок трубчатой заклепки 331 может быть вставлен в апертуру 330 связи. Правая сторона на фиг. 7 показывает трубчатую заклепку 331 до ее расклепывания (деформации) и приваривания к контактному штырьку 312 индукционной катушки. Левая сторона на фиг. 7 показывает трубчатую заклепку 331 вставленной, расклепанной и приваренной или как-то иначе связанной с контактным штырьком 312 индукционной катушки, для электрической и физической связи гибкого элемента 212 с контактным штырьком 312 индукционной катушки. В соответствии с вариантом реализации участок заклепки 331, который принят в апертуре 330 связи (хвост заклепки) может быть несколько большим, чем апертура связи, так, чтобы частично деформироваться при вставке. Это может гарантировать адекватный электрический контакт между заклепкой 331 и электрическим соединением 512 и уменьшить риск образования электрической дуги. Как только заклепка 331 вставлена через апертуру 330 связи, заклепка может быть расклепана до показанной слева на фиг. 7 формы. Как можно заметить, как только заклепка 331 расклепана, заклепка 331 оказывается по существу необратимо связанной с гибким элементом 212.
С заклепкой 331, находящейся на месте, по меньшей мере, участок контактного штырька 312 индукционной катушки может быть вставлен через трубчатую заклепку 331. Как можно заметить, в вариантах реализации, которые используют заклепку 331, апертура 330 связи должна быть несколько большей, чтобы согласовать площадь, занимаемую заклепкой 331, и все же принять контактный штырек 312 индукционной катушки. В соответствии с вариантом реализации заклепка 331 не столь чувствительна к нагреву, как может быть чувствительно электрическое соединение 512. Поэтому вместо припаивания заклепки 331 к контактному штырьку 312 индукционной катушки эти два компонента могут быть связаны вместе с использованием более высокотемпературного процесса, например точечной сварки, как показано сварочным соединением 713. Приваривание точечной сваркой заклепки 331 к контактному штырьку 312 индукционной катушки создает более высокотемпературную связь, которая может выдерживать среды с более высокой температурой, чем пайка, например. Кроме того, точечная сварка может ограничить тепло, которое воздействует на электрическое соединение 512, поскольку заклепка 331 связана с контактным штырьком 312 индукционной катушки. Кроме того, пока заклепка 331 сформирована из электрически проводящего материала, заклепка 331 может обеспечивать обмен электрической энергией между электрическим соединением 512 и контактным штырьком 312 индукционной катушки.
Описанные выше варианты реализации предоставляют улучшенную электрическую конфигурацию для сборки 200 датчика. Тогда как сборки датчика предшествующего уровня техники полагаются на соединительные провода и множественные PCB, описанные выше варианты реализации позволяют уменьшить большую часть этих компонентов. Описанная выше сборка 200 датчика использует гибкую плату 201, которая может быть связана с одним или несколькими компонентами датчика. Гибкая плата 201 может обеспечить электрическую связь между измерителем электроники 20 и компонентами датчика. Предпочтительно гибкая плата 201 позволяет устранить компоненты, требуемые для обеспечения электрической связи с компонентами датчика, по сравнению со сборкой 10 датчика техники предшествующего уровня. Кроме того, поскольку гибкие элементы компонента датчика могут содержать интегральные компоненты к основной части 202 гибкой платы 201, электрическая конфигурация оказывается более однородной и воспроизводимой, чем подходы в технике предшествующего уровня.
Кроме того, как описано выше, гибкая плата 201 может предоставить резервную цепь для непрерывного обеспечения электрической связи, даже если гибкий элемент компонента датчика ломается. Кроме того, с использованием заклепок, принимаемых гибкими элементами компонента датчика, сборка 200 датчика может выдерживать среды с более высокой температурой, чем сборки датчика предшествующего уровня техники, которые используют паяные соединения.
Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых авторами как находящиеся в пределах объема притязаний настоящего описания. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут быть различным образом скомбинированы или устранены, образуя дополнительные варианты реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и принципов настоящего описания. Специалистам в данной области техники также должно быть очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично, образуя дополнительные варианты реализации в пределах объема притязаний и принципов настоящего описания.
Таким образом, хотя конкретные варианты реализации и их примеры для сборки датчика описаны здесь в иллюстративных целях, различные эквивалентные модификации возможны в пределах объема притязаний настоящего описания, как будет видно специалистам в данной области техники. Представленные здесь принципы могут быть применены к другим сборкам датчика и не только к описанным выше и показанным на сопровождающих чертежах вариантам реализации. Соответственно объем притязаний описанных выше вариантов реализации должен быть определен из нижеследующей формулы.
Оптимизация работы процессора в обрабатывающей системе, содержащей один или более цифровых фильтров
Способ и устройство для вибрирования расходомерной трубки вибрационного расходомера
Стягивающая оправка с лепестковыми вырезами для пайки твердым припоем к расходомерной трубке
Способ и система преобразования данных
Передатчик с таймером относительного времени
Расходомер, включающий в себя балансный элемент
Способ и устройство для определения ошибки расхода в вибрационном расходомере
Измерительная электроника и способ количественного анализа перекачиваемого флюида
Балансировочное устройство для вибрационного расходомера
Способ и устройство для определения и компенсации изменения дифференциального смещения нуля вибрационного расходомера
Оптимизация работы процессора в обрабатывающей системе, содержащей один или более цифровых фильтров
Способ и устройство для вибрирования расходомерной трубки вибрационного расходомера
Стягивающая оправка с лепестковыми вырезами для пайки твердым припоем к расходомерной трубке
Способ и система преобразования данных
Передатчик с таймером относительного времени
Расходомер, включающий в себя балансный элемент
Способ и устройство для определения ошибки расхода в вибрационном расходомере
Измерительная электроника и способ количественного анализа перекачиваемого флюида
Балансировочное устройство для вибрационного расходомера
Способ и устройство для определения и компенсации изменения дифференциального смещения нуля вибрационного расходомера

