Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СНАБЖЕННЫМ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ С РЕАКТИВНЫМИ СОПЛАМИ
Вид РИД
Изобретение
Изобретение относится к управлению летательным аппаратом (ЛА) в полете с использованием реактивной силы струи двигательной установки.
Известны способы управления движением ЛА воздействием на струю газов реактивного сопла двигательной установки (И.Х. Фахрутдинов, А.В. Котельников, "Конструкция и проектирование ракетных двигателей твердого топлива", Москва, изд. "Машиностроение, 1987 г., стр. 215-253). Наиболее простой способ управления летательным аппаратом, снабженным двигательной установкой с реактивным соплом, принятый за прототип, представлен на стр. 236-239, рис. 9.30а и 9.316 и заключается в периодическом введении интерцепторов реверсным приводом в различные участки по периферии газовой струи за срезом реактивного сопла, в зависимости от необходимого направления движения летательного аппарата. Интерцептор вводится в газовую струю периодически, на время создания управляющего усилия. Для управления ЛА по трем каналам (тангаж, рыскание и крен) используют восемь интерцепторов, расположенных вне реактивного сопла по его периферии. Четыре интерцептора, расположенные попарно противоположно, обеспечивают управление ЛА по курсу и тангажу, а остальные четыре, также расположенные попарно противоположно, используются для управления по крену, при этом плоскости их поверхностей, направленные навстречу потоку газов в струе, скошены под углом к оси, с попарно противоположным направлением угла скоса. Для создания управляющего момента по крену достаточен небольшой угол скоса (1-2°). Известный способ может быть реализован и при наличии в двигательной установке нескольких реактивных сопел, их размещении снаружи вдоль корпуса летательного аппарата, с введением интерцепторов в газовую струю соответствующего реактивного сопла.
Существенными признаками прототипа, совпадающими с предлагаемым способом, являются следующие: способ управления летательным аппаратом, снабженным двигательной установкой с реактивными соплами, заключающийся в размещении реактивных сопел снаружи вдоль корпуса летательного аппарата и периодическом введении интерцепторов реверсным приводом в газовую струю соответствующего реактивного сопла, в зависимости от необходимого направления движения летательного аппарата.
В прототипе для управления движением ЛА используется восемь интерцепторов и восемь приводов для их вращения, что усложняет систему управления. Кроме того, для создания управляющего момента по крену площадь поверхности четырех интерцепторов используется с эффективностью 1,7-3,5% (пропорционально тангенсу угла скоса их поверхности), что увеличивает затраты энергии двигательной установки на управление по крену ЛА.
Техническим результатом, на решение которого направлено изобретение, является уменьшение количества интерцепторов и их приводов и увеличение эффективности управления интерцепторами по крену ЛА.
Для решения поставленной задачи в способе управления летательным аппаратом, снабженным двигательной установкой с реактивными соплами, заключающемся в размещении реактивных сопел снаружи вдоль корпуса летательного аппарата и периодическом введении интерцепторов реверсным приводом в газовую струю соответствующего реактивного сопла, в зависимости от необходимого направления движения летательного аппарата, реактивные сопла группируют попарно с близким расположением реактивных сопел в паре, в количестве не менее трех пар, и для управления летательным аппаратом используют, по меньшей мере, три интерцептора, по одному в каждой паре, расположенному между реактивными соплами пары, и реверсным приводом обеспечивают периодический ввод каждого интерцептора в любую газовую струю соответствующей пары реактивных сопел, необходимую для управления.
Отличительными признаками способа управления летательным аппаратом, снабженным двигательной установкой с реактивными соплами, являются следующие - реактивные сопла группируют попарно с близким расположением реактивных сопел в паре, в количестве не менее трех пар, и для управления летательным аппаратом используют, по меньшей мере, три интерцептора, по одному в каждой паре, расположенному между реактивными соплами пары, и реверсным приводом обеспечивают периодический ввод каждого интерцептора в любую газовую струю соответствующей пары реактивных сопел, необходимую для управления.
Благодаря наличию указанных отличительных признаков в совокупности с известными достигается следующий технический результат: для управления движением ЛА достаточно трех интерцепторов и трех реверсных приводов, при этом уменьшаются затраты энергии на управление по крену.
Предложенное техническое решение может найти применение в космической и авиационной технике при полетах с большой скоростью, когда управление движением ЛА посредством отклонения аэродинамических поверхностей в обтекающем потоке воздуха невозможно или малоэффективно.
Сущность предлагаемого решения поясняется чертежами.
На фиг. 1 представлено расположение трех пар реактивных сопел на корпусе ЛА.
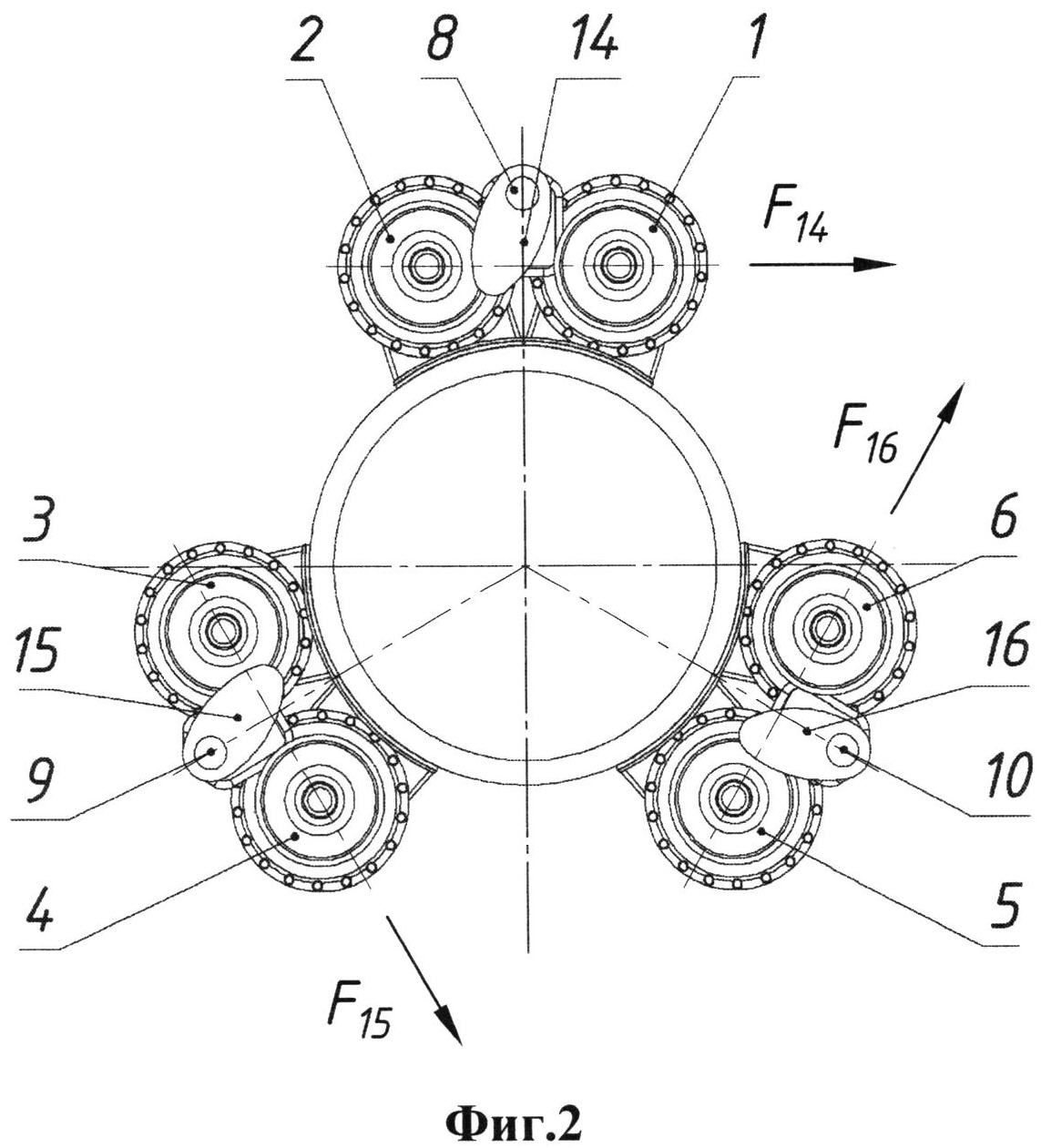
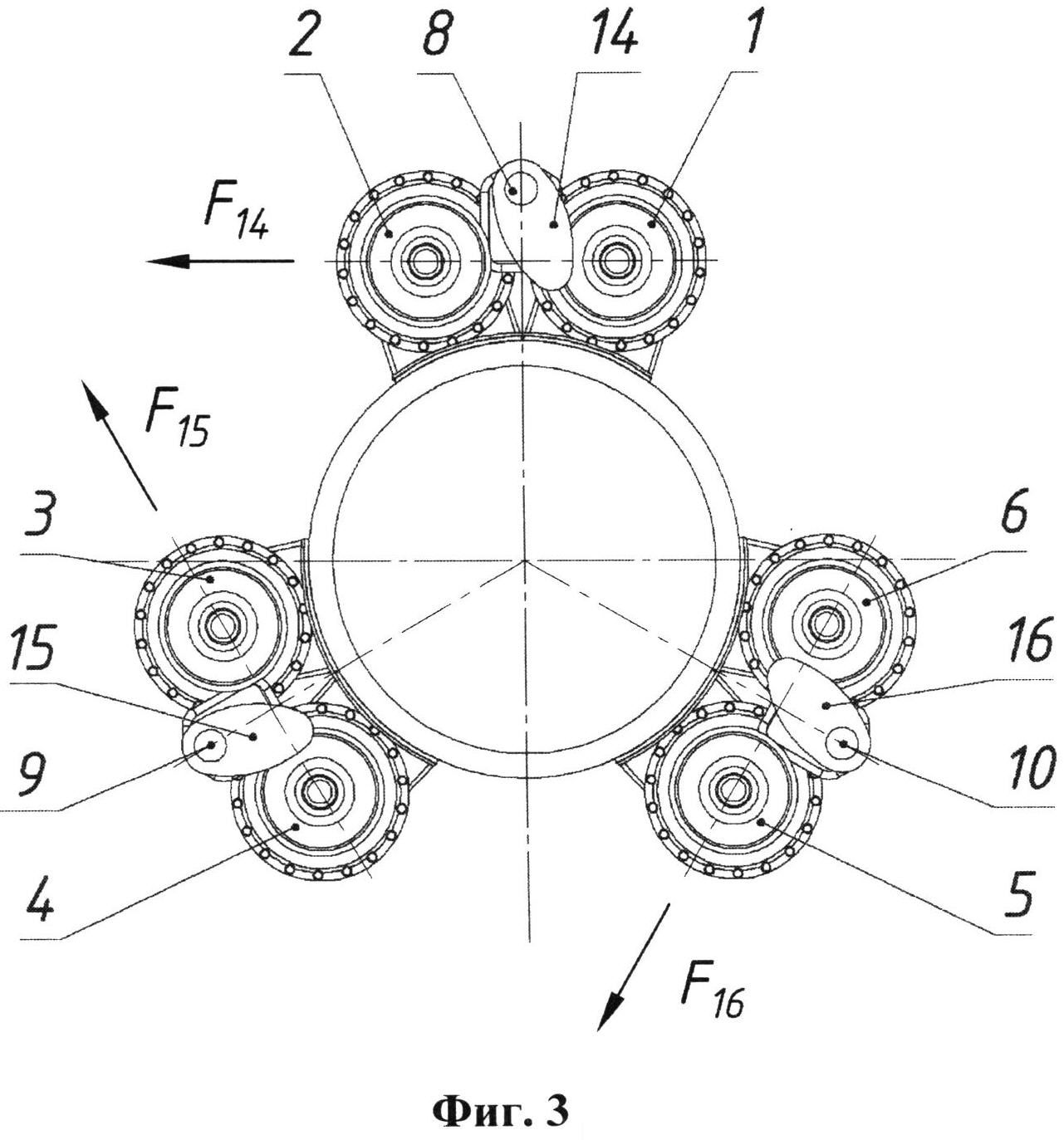
На фиг. 2 и 3 представлено положение интерцепторов при управлении движением ЛА по каналу рыскания в левую и правую сторону, соответственно.
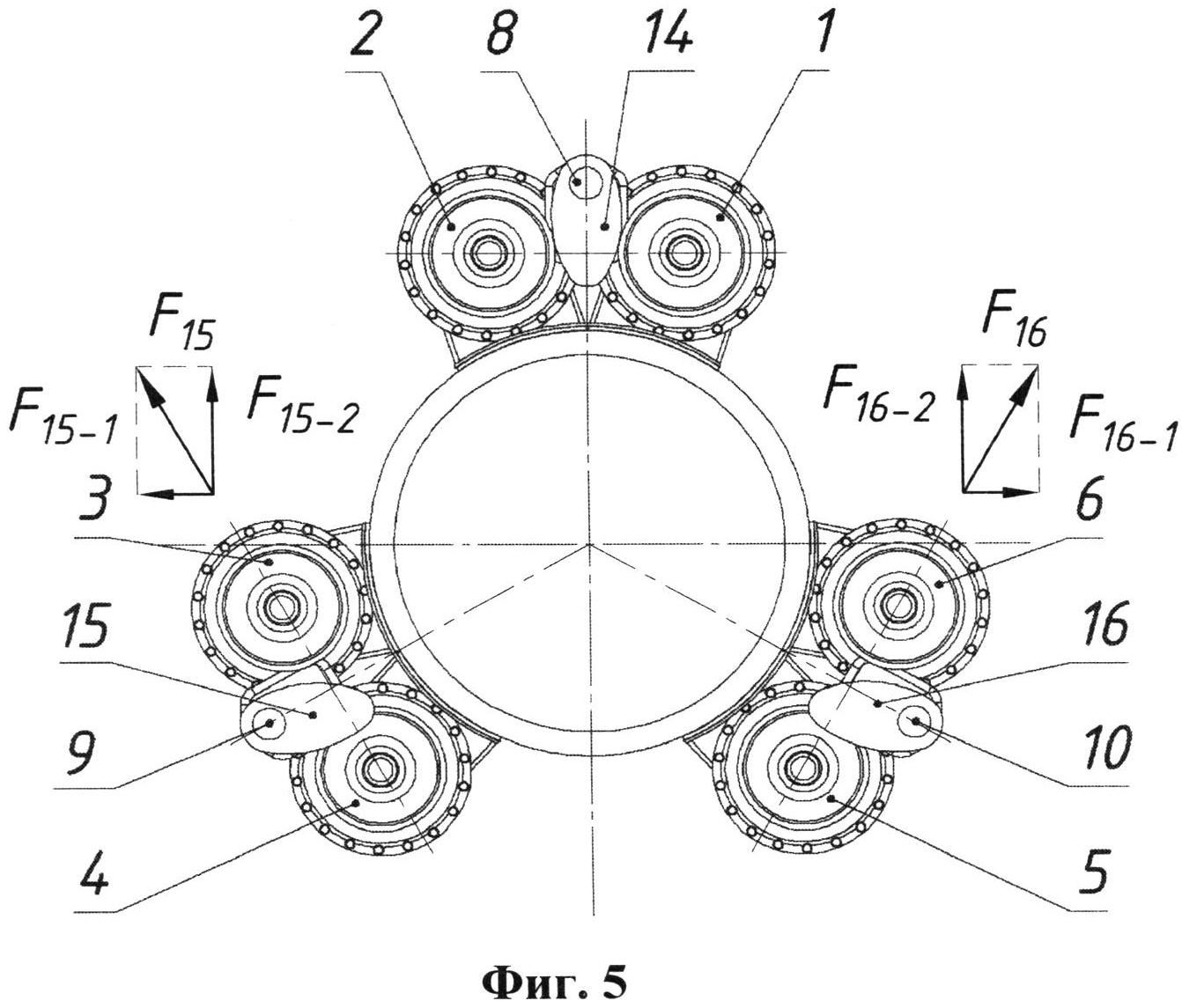
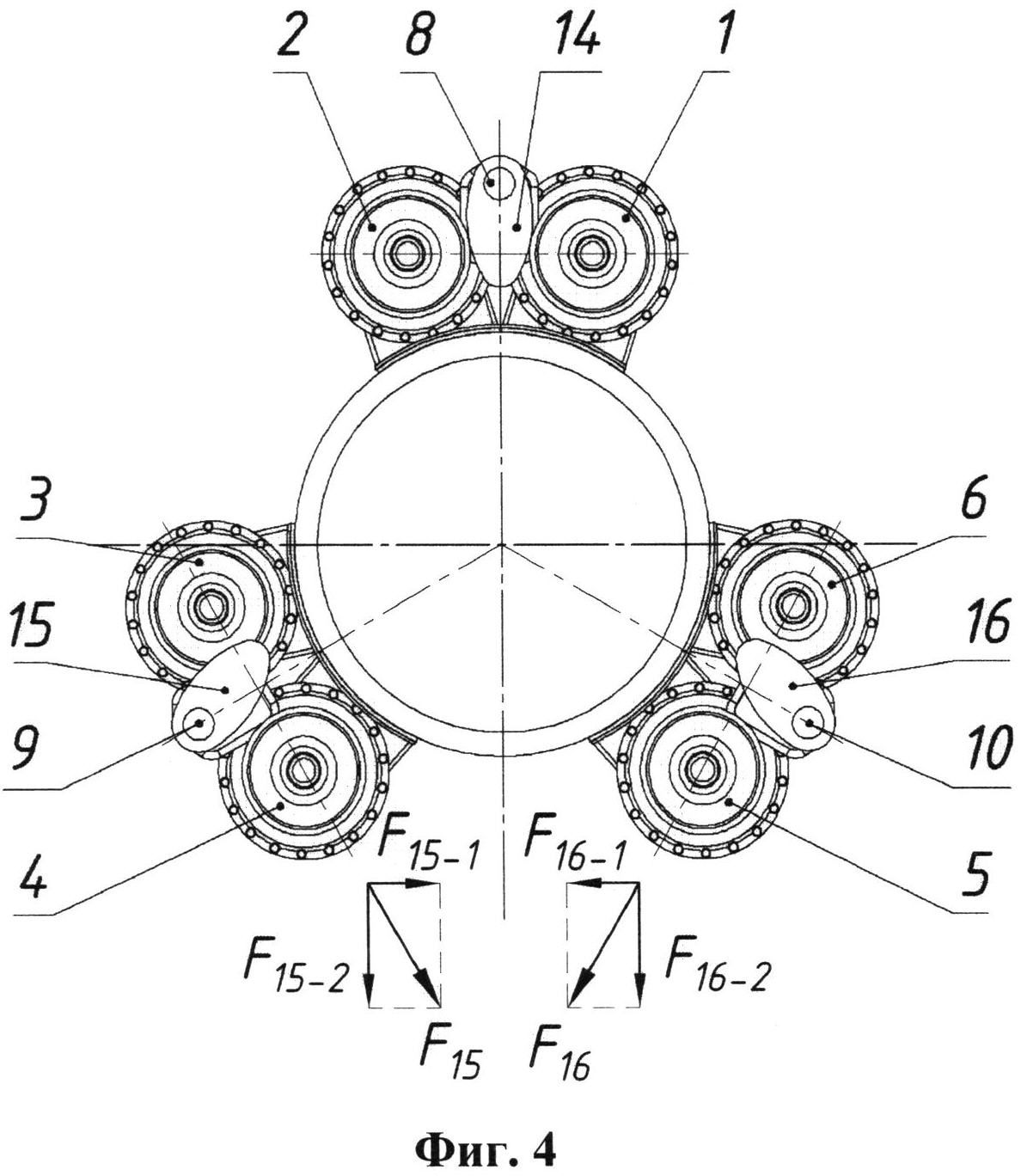
На фиг. 4 и 5 представлено положение интерцепторов при управлении движением ЛА по каналу тангажа на кабрирование (набор высоты) и на пикирование (уменьшение высоты полета), соответственно.
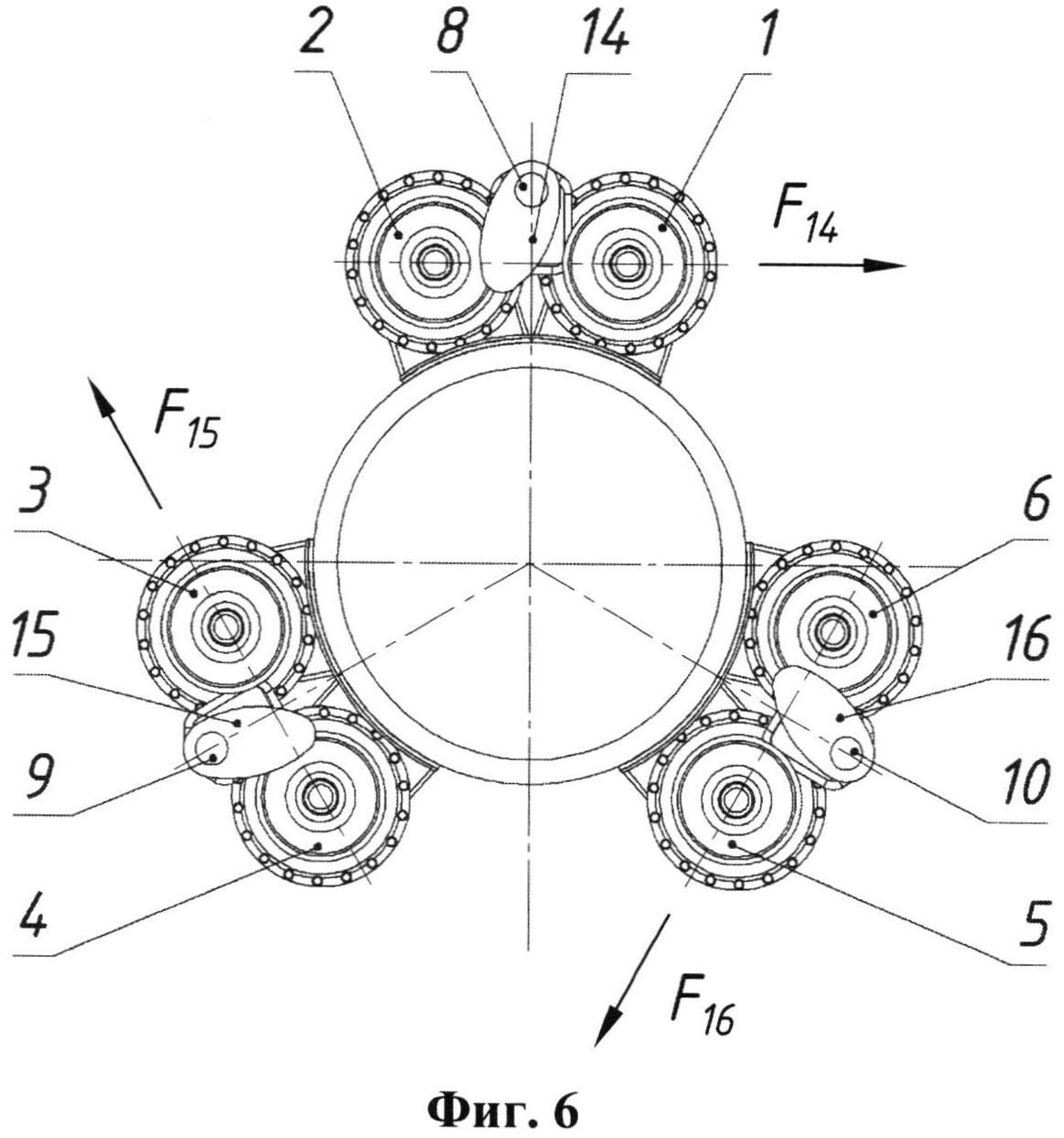
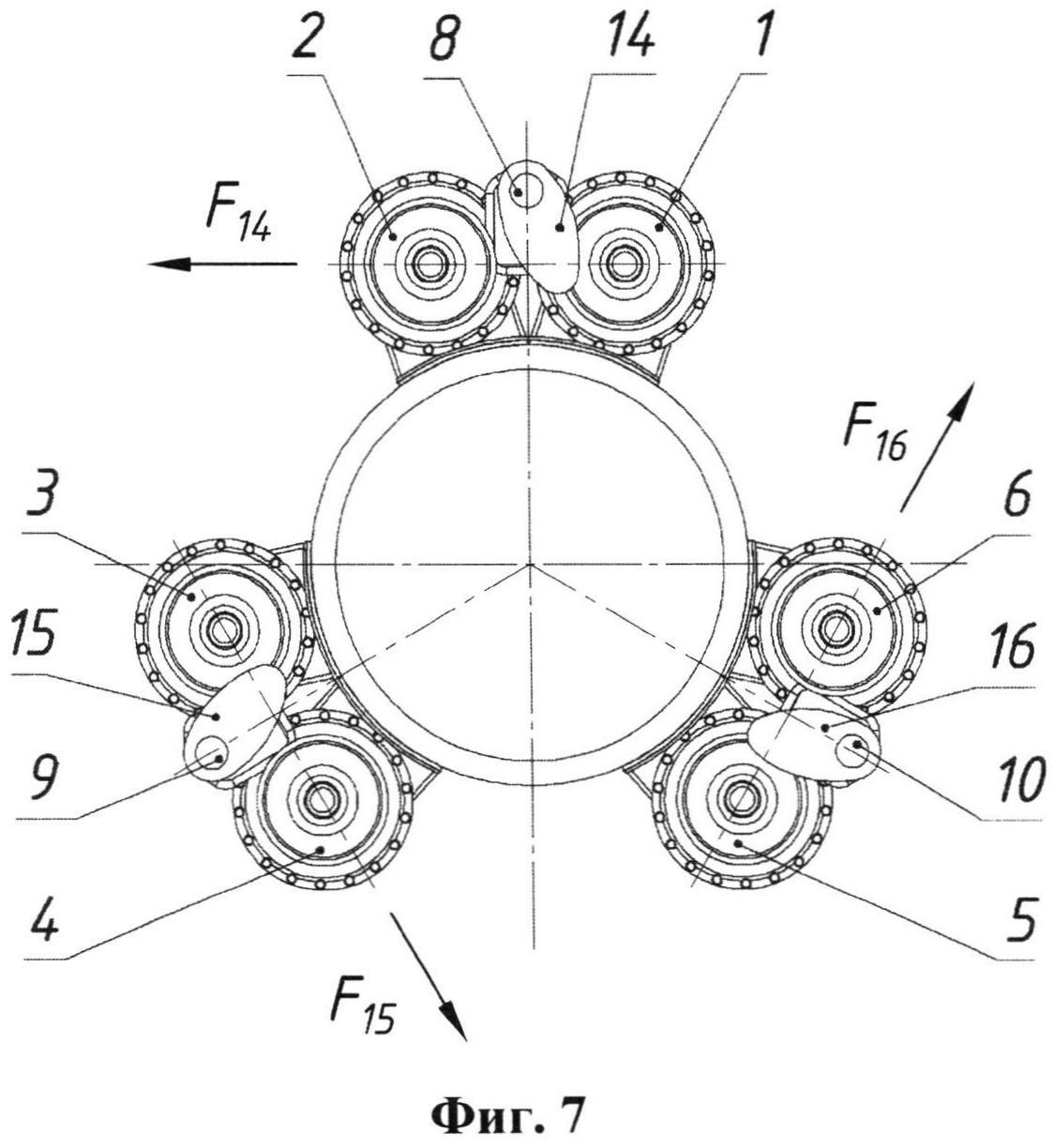
На фиг. 6 и 7 представлено положение интерцепторов при управлении движением ЛА по каналу крена, по часовой стрелке и против часовой стрелки, соответственно.
Представленное на чертежах устройство содержит три пары реактивных сопел, соответственно, 1 и 2, 3 и 4, 5 и 6, которые закреплены снаружи вдоль корпуса 7 ЛА, с близким расположением сопел в каждой паре. Вдоль корпуса 7 между реактивными соплами в каждой паре 1 и 2, 3 и 4, 5 и 6 закреплена поворотная ось, соответственно, 8-10, соединенная с реверсным приводом, соответственно, 11-13 и снабженная интерцептором, соответственно, 14-16, выступающим за срез реактивных сопел пары, соответственно 1 и 2, 3 и 4, 5 и 6. Реверсные приводы 11-13 выполнены с возможностью введения интерцептора, соответственно, 14-16 в любую газовую струю реактивного сопла пары, соответственно, 1 и 2, 3 и 4, 5 и 6. Корпус 7 содержит систему 17 управления, сообщенную с приводами 11-13.
Способ реализуется следующим образом.
Для изменения движения ЛА по каналу рыскания, налево от направления движения корпуса 7 (фиг. 2, левый поворот), система 17 (фиг. 1) управления задействует реверсный привод 11 для вращения оси 8 по часовой стрелке, а реверсные приводы 12 и 13 для вращения осей 9 и 10 против часовой стрелки. При этом установленный на оси 8 интерцептор 14 вводится в газовую струю за срезом реактивного сопла 2 (фиг. 2), а интерцепторы 15 и 16, установленные на осях 9 и 10, вводятся в газовые струи за срезом реактивных сопел 3 и 5, соответственно. На участках стенок реактивных сопел 2, 3 и 5 перед поверхностями стенок интерцепторов, соответственно 14, 15 и 16, образуются зоны повышенного давления, за счет торможения газового потока, формируя силу F14, действующую на стенку реактивного сопла 2 и через его крепление (на чертежах не показано) на заднюю часть корпуса 7 направо от направления его движения, и момент силы F14 относительно продольной оси корпуса 7, направленный на вращение корпуса 7 по часовой стрелке. Аналогично формируются сила F15, действующая на стенку реактивного сопла 3, и сила F16, действующая на стенку реактивного сопла 5. При этом приводы 12 и 13 поворачивают оси 9 и 10 на меньший угол, по сравнению с углом поворота оси 8 приводом 11, таким образом, чтобы сумма сил F15 и F16 равнялась силе F14. В результате силы F15 и F16 создают момент вращения корпуса 7 против часовой стрелки, компенсирующий момент вращения корпуса 7 силой F14, и, под действием силы F14 и проекций сил F15 и F16 на горизонтальную ось, корпус 7 поворачивается относительно оси, перпендикулярной его продольной оси и проходящей через центр тяжести (ЛА) с направлением носовой части корпуса 7 налево от направления движения, при этом корпус 7 ЛА совершает маневр по каналу рыскания в левую сторону без вращения вокруг своей оси. Изменение движения ЛА по каналу рыскания, направо от направления движения корпуса 7, фиг. 3, осуществляется аналогично. Отличие заключается в том, что система 17 управления задействует привод 11 для вращения оси 8 против часовой стрелки и интерцептор 14 погружается в газовую струю реактивного сопла 1, а приводы 12 и 13 задействуются для вращения осей, соответственно 9 и 10, по часовой стрелке, обеспечивая погружение интерцепторов 15 и 16 в газовые струи реактивных сопел, соответственно 4 и 6. При этом соотношение сил F14, F15 и F16 сохраняется, а их направление меняется на противоположное, обеспечивая маневр корпуса 7 ЛА по каналу рыскания, направо от направления его движения и без вращения вокруг его продольной оси. Для изменения движения ЛА по каналу тангажа, вверх от направления движения корпуса 7 (набор высоты) приводы 12 и 13 (фиг. 1) поворачивают оси, соответственно, 9 (фиг. 4) против часовой стрелки, а 10 по часовой стрелке на одинаковый угол, обеспечивая погружение интерцепторов 15 и 16 в газовые струи реактивных сопел, соответственно, 3 и 6, с формированием сил F15 и F16, направленных вниз, с наклоном к вертикальной плоскости симметрии корпуса 7. Силы F15 и F16 раскладываются на боковые составляющие F15-1 и F16-1, уравновешивающие друг друга, и вертикальные составляющие F15-2 и F16-2, которые поворачивают корпус 7 в вертикальной плоскости вокруг горизонтальной оси, проходящей через центр тяжести ЛА, с увеличением тангажа (угла наклона продольной оси корпуса 7 к горизонту). Уменьшение угла тангажа осуществляется аналогично. Отличие заключается в том, что система 17 управления ЛА задействует приводы 12 и 13 для вращения осей, соответственно, 9 по часовой стрелке и 10 против часовой стрелки, при этом интерцепторы 15 и 16 погружаются в газовые струи реактивных сопел, соответственно, 4 и 5 (фиг. 5), силы F15 и F16 меняют свое направление на противоположное, а их вертикальные составляющие F15-2 и F16-2 обеспечивают поворот корпуса 7 в вертикальной плоскости относительно горизонтальной оси, проходящей через центр тяжести корпуса 7, с уменьшением угла тангажа. Для случая крепления реактивных сопел 1-6 и поворотных осей 8-10 в передней части корпуса (на чертежах не показано) управление по рысканию и тангажу осуществляется аналогично, при этом направление вращения осей 9-10 приводами 11-13 меняется на противоположное описанному выше. Для управления по каналу крена, с поворотом корпуса 7 вокруг продольной оси по часовой стрелке, система 17 (фиг. 1) управления задействует приводы 11-13, для поворота осей, соответственно, 8-10 по (фиг. 6) часовой стрелке на одинаковый угол, при этом интерцепторы 14-16 погружаются в газовые струи реактивных сопел, соответственно, 2, 4 и 6, с формированием сил, соответственно, F14-F16, их равнодействующая сила (векторная сумма) равна нулю, а действующий на корпус 7 момент вращения, относительно его продольной оси равный сумме произведений величины каждой силы на кратчайшее расстояние от линии ее действия до продольной оси корпуса 7, поворачивает корпус 7 вокруг его продольной оси по часовой стрелке. Управление по каналу крена с поворотом корпуса 7 вокруг продольной оси против часовой стрелки осуществляется аналогично. Отличие заключается в том, что система 17 (фиг. 1) управления ЛА задействует приводы 11-13 для поворота осей, соответственно, 8-10 (фиг. 7) против часовой стрелки на одинаковый угол, при этом интерцепторы 14-16 погружаются в газовые струи реактивных сопел, соответственно, 1, 3 и 5, с формированием сил F14-F16, направленных в противоположную сторону, и действующий на корпус 7 момент сил поворачивает его вокруг продольной оси против часовой стрелки. Возможны также и более сложные варианты управления движением ЛА, представляющие собой комбинацию описанных вариантов, например поворот корпуса 7 по каналу рыскания с поворотом по каналу крена, с набором высоты или снижением, при этом система 17 управления ЛА варьирует углами поворота интерцепторов 14-16 и периодом (импульсом) их введения в газовые струи реактивных сопел 1-6, обеспечивая необходимое движение ЛА. Пары реактивных сопел 1 и 2, 3 и 4, 5 и 6 могут располагаться на корпусе 7 как на одинаковом расстоянии друг от друга, так и на различных расстояниях. Отличие заключается в том, что при одинаковом расположении пар реактивных сопел 1 и 2, 3 и 4, 5 и 6 с одинаковым расстоянием друг от друга система 17 управления ЛА использует более простые алгоритмические зависимости управления интерцепторами 14-16, а при различных расстояниях между парами реактивных сопел 1 и 2, 3 и 4, 5 и 6 система 17 управления, с учетом различия во влиянии на движение ЛА различных интерцепторов 14-16, в зависимости их расположения, должна обеспечивать управление интерцепторами 14-16 по более сложным алгоритмическим зависимостям.
Способ управления летательным аппаратом, снабженным двигательной установкой с реактивными соплами, заключающийся в размещении реактивных сопел снаружи вдоль корпуса летательного аппарата и периодическом введении интерцепторов реверсным приводом в газовую струю соответствующего реактивного сопла, в зависимости от необходимого направления движения летательного аппарата, отличающийся тем, что реактивные сопла группируют попарно с близким расположением реактивных сопел в паре, в количестве не менее трех пар, и для управления летательным аппаратом используют, по меньшей мере, три интерцептора, по одному в каждой паре, расположенному между реактивными соплами пары, и реверсным приводом обеспечивают периодический ввод каждого интерцептора в любую газовую струю соответствующей пары реактивных сопел, необходимую для управления.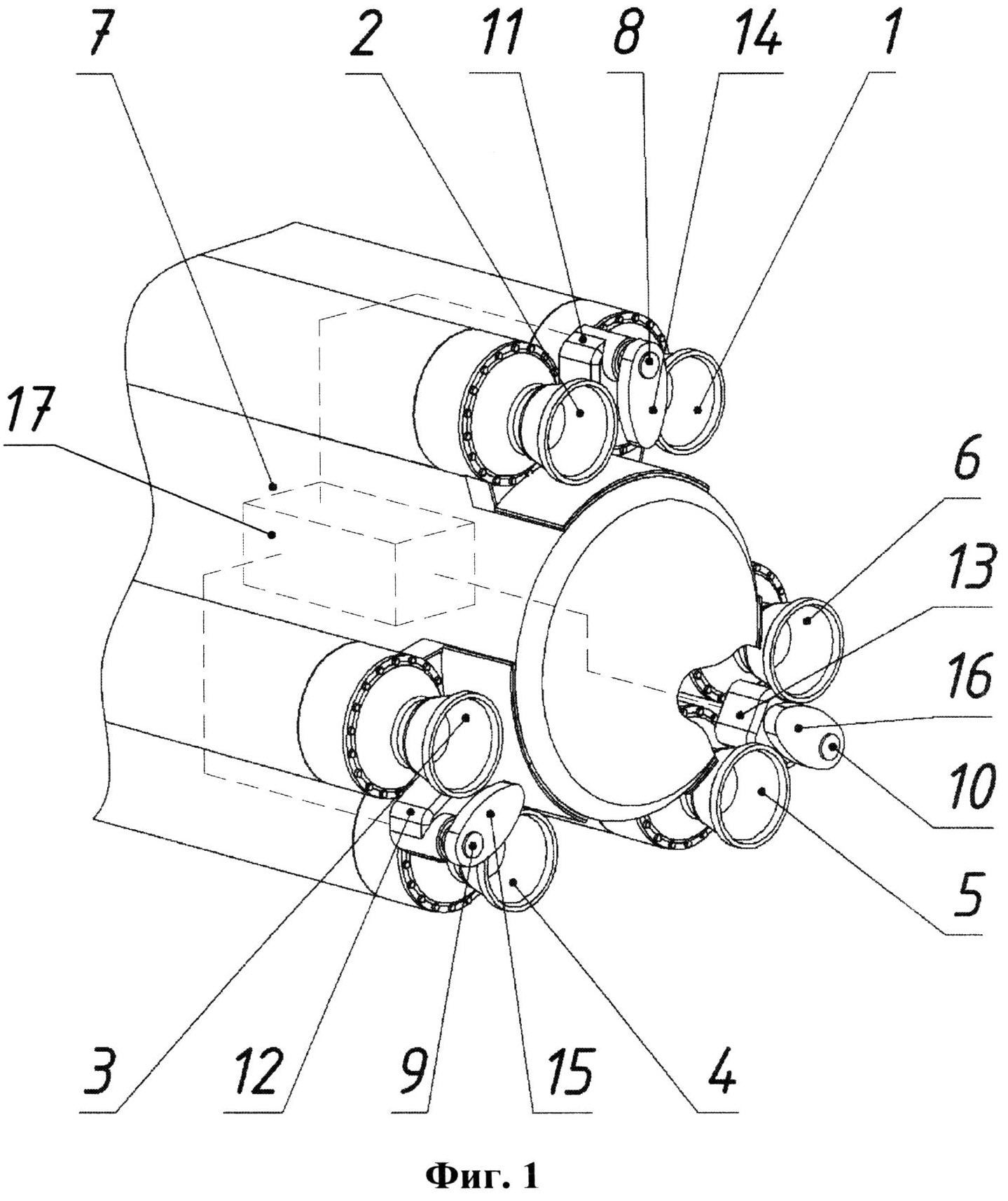
Способ поражения подводных целей
Способ поражения подводных целей
Генератор непрерывных случайных сигналов произвольной длины
Способ цифровой генерации непрерывного случайного процесса произвольной длины
Способ формирования коррелированных случайных сигналов
Генератор коррелированных случайных сигналов
Устройство противолодочного вооружения
Способ старта летательного аппарата (варианты)
Летательный аппарат (варианты)
Устройство спасения людей в помещении при загрязнении внешнего воздуха (варианты)
Способ поражения подводных целей
Способ поражения подводных целей
Генератор непрерывных случайных сигналов произвольной длины
Способ цифровой генерации непрерывного случайного процесса произвольной длины
Способ формирования коррелированных случайных сигналов
Генератор коррелированных случайных сигналов
Устройство противолодочного вооружения
Способ старта летательного аппарата (варианты)
Летательный аппарат (варианты)
Устройство спасения людей в помещении при загрязнении внешнего воздуха (варианты)

