СПОСОБ МОДЕЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ НА ГАЗОВОМ ПРОМЫСЛЕ
Вид РИД
Изобретение
Изобретение представляет собой способ моделирования процессами для управления технологического комплекса на газовом промысле. Способ обеспечивает возможность оптимального управления различными процессами технологического комплекса с обеспечением наилучших критериев качества при регулировании.
Известны патенты, в которых описаны способы регулирования процессов на нефтегазовых промыслах с предварительным созданием математических моделей на основе измеряемых данных, например патент ЕР №2606402 от 26.06.2013 «Вычислительное устройство и способ для многокомпонентной оптимизации в режиме реального времени» (патентообладатель [СА] MFG TECHNOLOGY NETWORK INC, Кл. МПК G05B 13/04; G05B 19/418), патент США №6266619 от 24.07.2001 «Способ и устройство разработки месторождения» (патентообладатель Halliburton Energy Serv Inc[US], кл. МПК Е21В 43/00; Е21В 43/12; G06F 19/00) и т.д. Данные способы и устройства включают построение математических моделей на основе измеряемых данных работы технологического комплекса и обеспечение дальнейшей регулировки процессов на основе получившейся модели.
Известен патент США №7672825 от 12.01.2010 «Способ для контроля выработки нефти и/или газа в пластах с применением системы управления на основе обратной связи» (патентообладатель ExxonMobil Res & Eng Со [US], Кл. МПК F17D1/00; G01F 1/28; G01F 1/74; G01F 1/86; G01F 15/02). Способ заключается в том, что на основе физических параметров углеводородов и других жидкостей в пласте и скважине вычисляется множество математических моделей пласта высокого порядка и/или низкого порядка, математическая модель обновляется итеративно в соответствии с данными, получаемыми с датчиков, так чтобы разница между вычисленными и наблюдаемыми значениями минимизировалась, в течение как минимум одного шага обновления из множества математических моделей выбирается оптимальная математическая модель (или их комбинация), для которой средняя разность между вычисленным значением и зафиксированным значением минимальна, на основании этого реализуется алгоритм оптимального управления.
Недостаток данного способа заключается в том, что для большого количества параллельных процессов технологического комплекса необходимость постоянно сравнивать математические модели и выбирать наиболее близкую приводит к существенному увеличению количества операций в системе, а следовательно, к усложнению процесса регулирования в режиме реального времени.
Известен патент РФ №2461707 от 09.04.2008 «Моделирование переходного режима бурильной колонны в процессе бурения» (патентообладатель Лоджинд Б.В. (NL), кл. МПК Е21 В44/00, G05B 19/00). Способ включает следующие стадии: создание конечноразностной модели для моделирования режима работы бурильной компоновки, выполнение моделирования операции бурения с использованием конечноразностной модели, анализ результата моделирования и выборочное модифицирование операции бурения на основании анализа.
Недостаток данного способа заключается в следующем: для построения математической модели с использованием конечноразностных уравнений требуются существенные знания о физике моделируемых процессов, то есть модель невозможно построить только лишь на основе измеряемых статистических данных. Это усложняет процесс моделирования и регулирования, снижает степень автоматизированности процесса моделирования и, соответственно, управления и увеличивает требования к квалификации персонала на промысле. К тому же данный способ используется для управления режимом работы бурильного оборудования и не предназначен для иных технологических процессов и механизмов газового промысла.
Технический результат заявляемого изобретения заключается в обеспечении наилучшего критерия качества при регулировании, т.е. в минимизации ошибки между заданной величиной и измеряемой величиной технологического параметра, в обеспечении более точного и гибкого процесса регулирования. Также технический результат заключается в упрощении процесса регулирования, в уменьшении количества операций, производимых системой при моделировании и регулировании переходных процессов, в универсальности, то есть в возможности использования данного технического решения для различных механизмов и технологических процессов на газовом промысле.
Способ моделирования технологических процессов на газовом промысле заключается в том, что в технологической системе инициируют переходный процесс путем изменения положения исполнительного механизма, фиксируют параметры технологической системы в момент начала переходного процесса, в середине периода переходного процесса, в конце переходного процесса, на основе зафиксированных параметров осуществляют построение модели зависимости периода переходного процесса от положения исполнительного механизма с использованием аппроксимации полиномом третьего порядка, а также построение модели зависимости изменения технологического параметра от времени с использованием аппроксимации полиномом второго порядка, повторяют цикл для нескольких последовательных положений исполнительного механизма, рассчитывают на основании получившегося набора полиномов коэффициенты ПИД-регулятора.
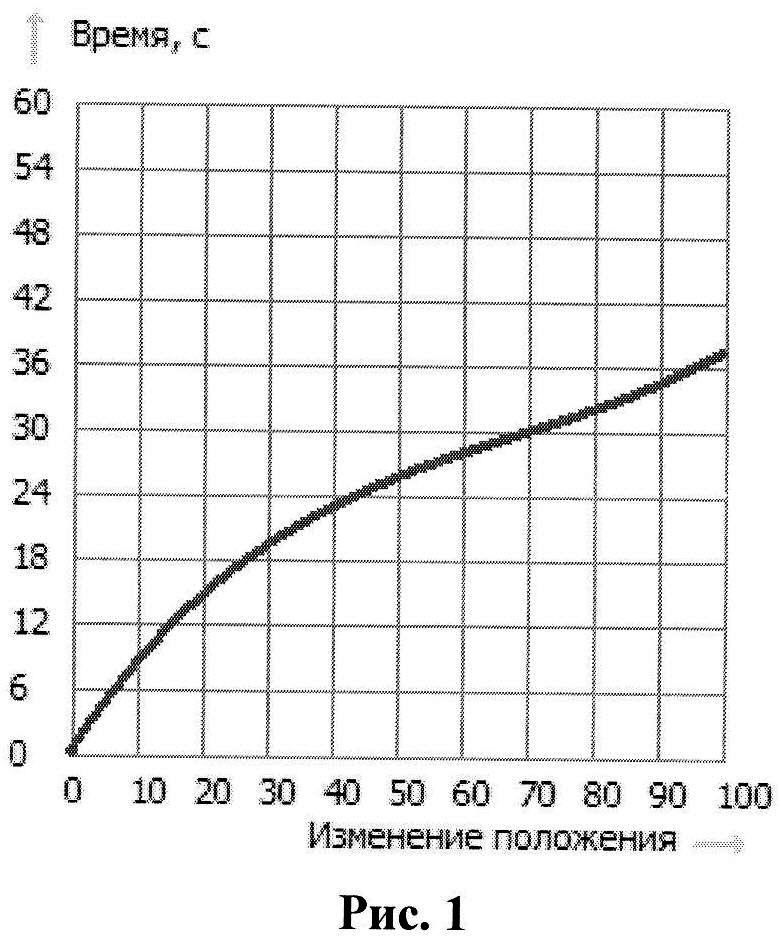
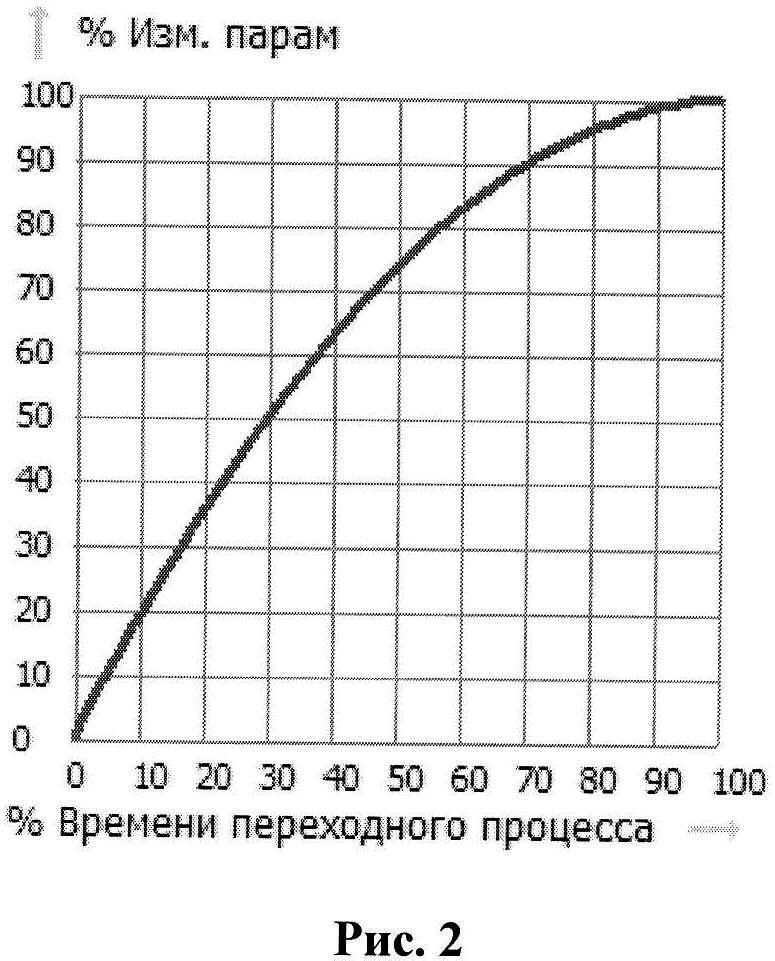
Способ моделирования технологических процессов заключается в следующем. В технологической системе инициируют переходный процесс путем изменения положения исполнительного механизма (например, крана запорной арматуры для технологической нити УКПГ). Затем с помощью соответствующей системы датчиков фиксируют технологические параметры в момент начала переходного процесса, в середине периода переходного процесса, в конце переходного процесса. На основе зафиксированных данных осуществляют построение модели зависимости периода переходного процесса от положения исполнительного механизма с использованием аппроксимации полиномом третьего порядка (рис. 1), а также построение модели зависимости изменения технологического параметра от времени с использованием аппроксимации полиномом второго порядка (рис. 2). Затем повторяют цикл для нескольких последовательных положений исполнительного механизма, в результате чего получают набор функций - полиномов, определяющих математическую модель переходного процесса. Далее, после построения математической модели, в блоке управления производится расчет коэффициентов ПИД-регулятора для задания управляющего воздействия, которое передается в систему регуляторов, осуществляющую регулирование технологическими параметрами через исполнительные механизмы технологического комплекса.
Например, после подбора коэффициентов ПИД-регулятора можно поддерживать заданное значение расхода газа путем вычисления такого положения входного крана, чтобы обеспечить наилучшие критерии качества системы регулирования (то есть минимизировать ошибку между прогнозируемой и реальной величиной заданного технологического параметра).
Особенностью данного способа является минимальный массив данных, необходимых для моделирования переходного процесса, то есть на каждом шаге изменения положения им требуются данные всего о трех точках переходного процесса: значения параметра в начале переходного процесса (t1, p1), в середине периода переходного процесса (t2, р2), при завершении переходного процесса (t3, р3).
Таким образом, в данном способе достаточно небольшого массива измеряемых данных, чтобы смоделировать переходный процесс, что является актуальным для технологических комплексов с большим числом регулируемых процессов, которыми необходимо управлять централизованно.
К тому же не требуется знаний о физике переходного процесса, моделирование осуществляется только на основе измеряемых статистических данных, поэтому данное техническое решение может быть использовано для управления различными механизмами технологического комплекса газового промысла. Например, данное техническое решение позволяет управлять расходом газа в трубопроводах УКПГ и расходом газа газотурбинных установок энергетического комплекса, при этом управление может быть централизованным.
Технический результат заключается в гибкости и точности управления, так как позволяет спрогнозировать изменение технологических параметров на каждом шлейфе УКПГ. За счет этого достигается наилучший критерий качества при регулировании, т.е. минимизируется ошибка между заданной и реально измеренной величиной технологического параметра.
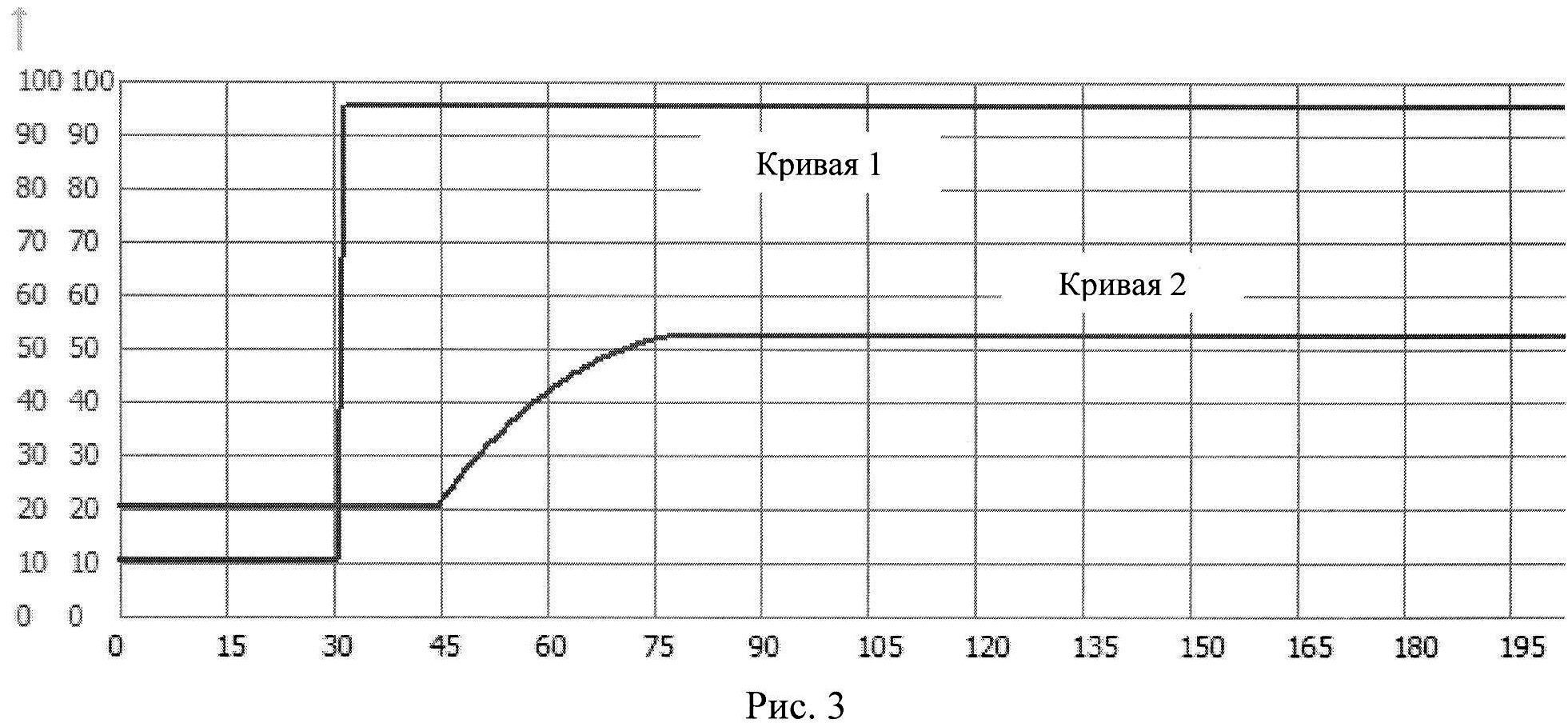
Далее приведен пример смоделированного изменения расхода газа через технологическую нитку при изменении положения входного крана (см. рис. 3). На 30-й секунде рассматриваемого периода изменилось положение механизма с p1=10 до р2=95. Запустили таймер чистой задержки - 15 секунд. После срабатывания таймера зафиксировали значение технологического параметра (Кривая 2 рис. 3) в начале переходного процесса, SpF(p1)=4 (точка с координатами (45, 24) на рис. 3), после окончания переходного процесса SpF(p2)=36 (точка с координатами (77, 52) на рис. 3). Значение параметра после окончания переходного процесса изменится на SpF(p2)-SpF(p1)=32. Длительность переходного процесса составляет P3F(|p2-p1|)=P3F(|95-10|)=P3F(85)=32 (с). Середина периода переходного процесса составляет 16 секунд, значение технологического параметра в середине переходного процесса составляет 42,4.
Таким образом, по данным измерений определяют значения трех точек в начале переходного процесса, (0; 20), в середине переходного процесса - (16; 42,4), в конце переходного процесса (32; 52). С помощью рассчитанных 3-х точек (0; 20), (16; 42,4), (32; 52) рассчитываются коэффициенты полинома функции PolyF(t), характеризующего изменение значения технологического в ходе переходного процесса. Каждую итерацию значения параметра рассчитывают как у=у+PolyF(t)-PolyF(t-1). После идентификации математической модели подбирают коэффициенты ПИД-регулятора на основе целевой задачи, которой может быть определение минимального времени регулирования, определение минимального перерегулирования, определение минимального числа колебаний.
Патентный поиск показал, что данное техническое решение является новым, не известным из предыдущего уровня техники, не очевидным для специалиста средней квалификации для данной области техники. Кроме того, данное техническое решение является промышленно применимым. При этом данное техническое решение не является математической моделью или алгоритмом как таковым, а является устройством, оптимизирующим механизм управления технологической системой на основе выбора модели, требующей для построения минимального массива измеряемых данных, причем модель возможно построить только лишь на основе статистических измеряемых данных.
Способ моделирования технологических процессов на газовом промысле заключается в том, что в технологической системе инициируют переходный процесс путем изменения положения исполнительного механизма, фиксируют параметры технологической системы в момент начала переходного процесса, в середине периода переходного процесса, в конце переходного процесса, на основе зафиксированных параметров осуществляют построение модели зависимости периода переходного процесса от положения исполнительного механизма с использованием аппроксимации полиномом третьего порядка, а также построение модели зависимости изменения технологического параметра от времени с использованием аппроксимации полиномом второго порядка, повторяют цикл для нескольких последовательных положений исполнительного механизма, рассчитывают на основании получившегося набора полиномов коэффициенты ПИД-регулятора.