Результат интеллектуальной деятельности: НЕБУЛАЙЗЕР, БЛОК УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ИМ И СПОСОБ УПРАВЛЕНИЯ НЕБУЛАЙЗЕРОМ
Вид РИД
Изобретение
ТЕХНИЧЕСКАЯ ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к небулайзеру, который распыляет жидкость, которая хранится в нем, на мелкие капельки, например, для ингаляции пользователем небулайзера, и, в частности, относится к блоку управления небулайзером и способу управления небулайзером, который может обнаруживать, находится ли распыляющий элемент, такой как сетка или мембрана, в правильном положении в небулайзере.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Небулайзеры или распылители, как их иногда называют, представляют собой устройства, которые генерируют мелкодисперсный спрей или аэрозоль из жидкости. В частности, полезное применение небулайзеров состоит в том, чтобы предоставлять мелкодисперсный спрей, содержащий растворенное или суспендированное лекарственное средство в виде частиц для введения пациенту посредством ингаляции.
Небулайзеры на основе пьезосеток являются общеупотребительными для генерации аэрозолей в таких аппаратах для доставки лекарственных средств, в соответствии с чем пьезоэлектрический элемент заставляет вибрировать сетку, чтобы получать мелкодисперсный аэрозольный спрей. В частности, капельки, распределяемые по сетке, заставляют вибрировать посредством пьезоэлектрического элемента для того, чтобы создавать спрей. В некоторых небулайзерах пьезоэлектрический элемент связан с сетчатым элементом, тогда как в других небулайзерах сетчатый элемент отделен от (т.е. не находится в контакте с) пьезоэлектрического элемента (иногда обозначаемых как небулайзеры на основе пьезополостей-сеток). Преимущество наличия сетчатого элемента отдельно от пьезоэлектрического элемента состоит в том, что сетчатый элемент можно удалять из небулайзера и очищать или полностью замещать после определенного количества использований.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Однако обнаружено, что эффективность небулайзера, которую можно измерять с точки зрения скорости образования капелек, очень чувствительна к разделению между пьезоэлектрическим элементом и сеткой в небулайзере. В частности, размер полости для жидкости между пьезоэлектрическим элементом и сеткой влияет на давление на сетке и тем самым на скорость образования капелек.
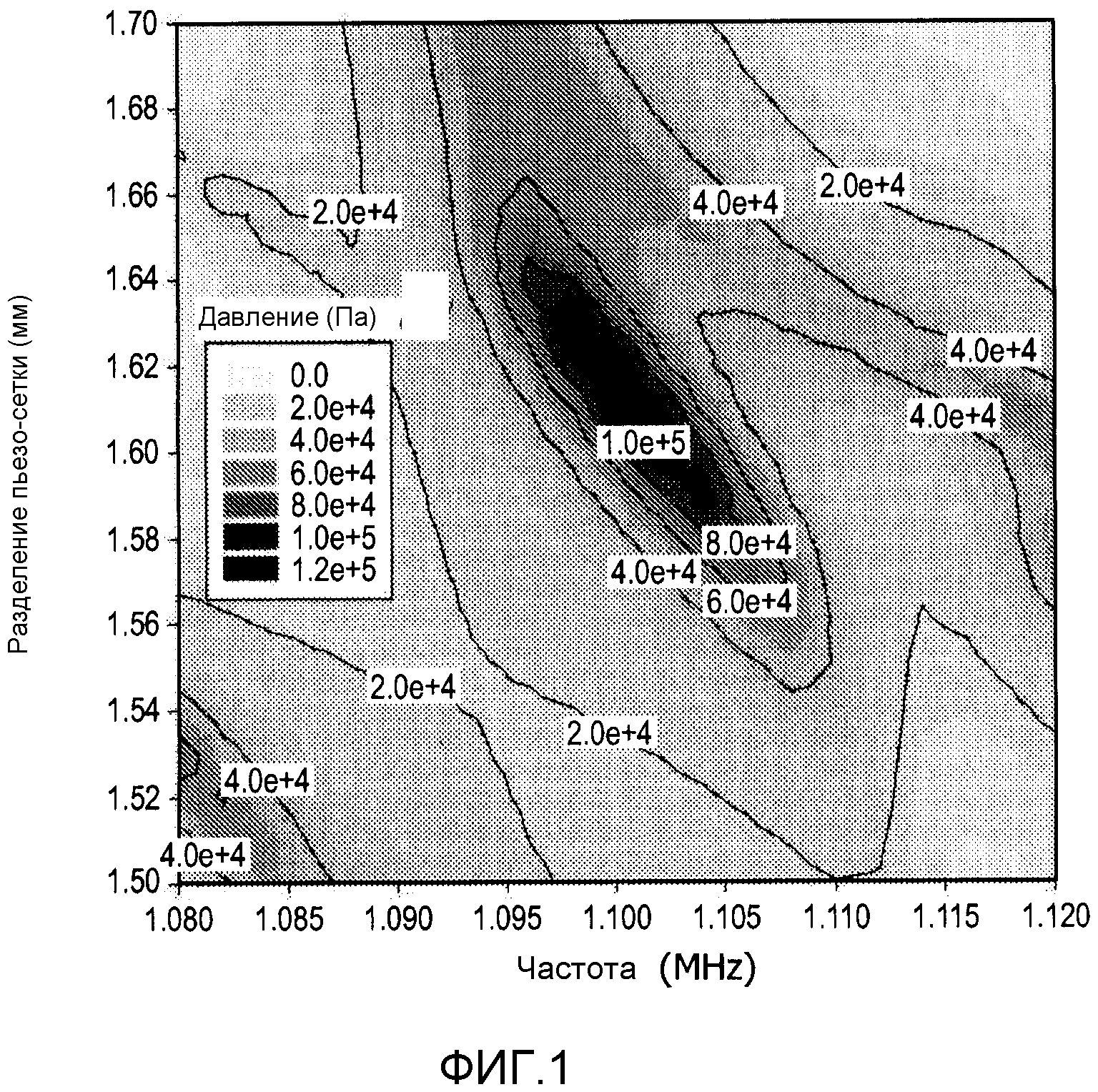
На фиг.1 проиллюстрировано давление, создаваемое на сетке в небулайзере для различных частот вибрации пьезоэлектрического элемента и различных расстояний между пьезоэлектрическим элементом и сеткой (также обозначаемых как уровень воды). Таким образом, можно видеть, что отклонение всего в десятки микрометров (десятки микронов) от оптимального положения может оказывать значительное влияние на давление на сетке и, следовательно, на скорость образования капелек.
Следовательно, согласованная работа небулайзера основана на точном повторном расположении сетки в небулайзере после очистки или замены. Кроме того, если сетку повторно не располагают корректно, небулайзер может не работать вовсе или компоненты небулайзера могут быть повреждены во время работы.
Таким образом, существует необходимость в блоке управления небулайзером и способе управления небулайзером, который может обнаруживать, правильно ли расположена сетка.
Согласно первому аспекту по изобретению, предусмотрен блок управления для управления работой небулайзера, где блок управления выполнен с возможностью измерять импеданс исполнительного механизма в небулайзере и для того, чтобы определять, находится ли распыляющий элемент в небулайзере в правильном положении по отношению к исполнительному механизму, основываясь на измеряемом импедансе.
В одном из вариантов осуществления блок управления выполнен с возможностью определять, что распыляющий элемент расположен правильно, если измеряемый импеданс исполнительного механизма равен или находится в пределах предварительно определяемого диапазона предварительно определяемых значений импеданса.
В альтернативном варианте осуществления блок управления выполнен с возможностью измерять импеданс исполнительного механизма, когда исполнительный механизм работает на первой и второй частотах, и для того, чтобы определять, что распыляющий элемент расположен правильно, если оба измеряемых импеданса равны или находятся в пределах предварительно определяемого диапазона соответствующих, предварительно определяемых значений импеданса. Этот вариант осуществления может предотвращать ложноположительные ошибки в определении положения распыляющего элемента.
Предпочтительно, блок управления выполнен с возможностью активировать исполнительный механизм для того, чтобы распылять жидкость, если определяют, что распыляющий элемент находится в правильном положении в небулайзере. Таким образом, небулайзер будет работать на оптимальной или почти оптимальной скорости образования капелек.
В одной реализации блок управления выполнен с возможностью деактивировать исполнительный механизм, если определяют, что распыляющий элемент не находится в правильном положении. Таким образом, возможно избегать повреждения каких-либо компонентов небулайзера посредством неправильного расположения распыляющего элемента.
В дополнительной реализации блок управления выполнен с возможностью предоставлять индикацию пользователю небулайзера о том, что пользователь должен изменить положение распыляющего элемента.
Согласно одному из вариантов осуществления блок управления выполнен с возможностью корректировать частоту вибрации исполнительного механизма, если определяют, что распыляющий элемент не находится в правильном положении.
Согласно другому варианту осуществления блок управления выполнен с возможностью корректировать относительное положение исполнительного механизма и распыляющего элемента с использованием второго исполнительного механизма в небулайзере, если определяют, что распыляющий элемент не находится в правильном положении.
Предпочтительно, блок управления выполнен с возможностью повторно измерять импеданс исполнительного механизма после корректировки, описанной выше, чтобы определять, может ли быть разрешена работа небулайзера.
В одном из вариантов осуществления блок управления выполнен с возможностью измерять импеданс исполнительного механизма посредством подачи синусоидального напряжения с известной амплитудой на исполнительный механизм и измерения амплитуды получаемого тока и фазового сдвига между получаемым током и подаваемым напряжением.
Согласно альтернативному варианту осуществления блок управления выполнен с возможностью измерять импеданс исполнительного механизма посредством измерения напряжения на исполнительном механизме и тока через исполнительный механизм во время работы.
Согласно второму аспекту по изобретению, предусмотрен небулайзер, который содержит камеру резервуара для хранения жидкости, подлежащей распылению; исполнительный механизм для того, чтобы заставлять вибрировать жидкость, хранимую в камере резервуара; и блок управления, как описано выше.
Предпочтительно небулайзер дополнительно содержит распыляющий элемент, расположенный в резервуаре для распыления жидкости, когда исполнительный механизм заставляет вибрировать жидкость и, даже более предпочтительно, распыляющий элемент является удаляемым из небулайзера.
Согласно третьему аспекту по изобретению предоставлен способ управления небулайзером, способ содержит:
- измерение импеданса исполнительного механизма в небулайзере; и
- определение того, находится ли распыляющий элемент в небулайзере в правильном положении по отношению к исполнительному механизму, основываясь на измеряемом импедансе.
В одном из вариантов осуществления определяют, что распыляющий элемент должен быть расположен правильно, если измеряемый импеданс исполнительного механизма равен или находится в пределах предварительно определяемого диапазона предварительно определяемого значения импеданса.
В альтернативном варианте осуществления стадия измерения импеданса исполнительного механизма содержит измерение импеданса исполнительного механизма при первой и второй частотах, и где стадия определения содержит определение того, что распыляющий элемент находится в правильном положении, если оба измеряемых импеданса равны или находятся в пределах предварительно определяемого диапазона соответствующих, предварительно определяемых значений импеданса.
Предпочтительно, способ дополнительно включает стадию активации исполнительного механизма для того, чтобы распылять жидкость, если определяют, что распыляющий элемент находится в правильном положении в небулайзере.
В одной реализации способ дополнительно включает стадию деактивации исполнительного механизма, если определяют, что распыляющий элемент не находится в правильном положении. Предпочтительно, в этой реализации способ дополнительно включает предоставление индикации пользователю небулайзера о том, что пользователь должен изменить положение распыляющего элемента.
В одном из вариантов осуществления способ дополнительно включает стадию корректировки частоты вибрации исполнительного механизма, если определяют, что распыляющий элемент не находится в правильном положении.
В другом варианте осуществления способ дополнительно включает стадию корректировки относительного положения исполнительного механизма и распыляющего элемента с использованием второго исполнительного механизма в небулайзере, если определяют, что распыляющий элемент не находится в правильном положении.
Предпочтительно, способ дополнительно включает стадию повторного измерения импеданса исполнительного механизма после стадии корректировки.
В одном из вариантов осуществления стадия измерения импеданса исполнительного механизма содержит подачу синусоидального напряжения с известной амплитудой на исполнительный механизм и измерение амплитуды получаемого тока и фазового сдвига между получаемым током и подаваемым напряжением.
В другом варианте осуществления стадия измерения импеданса исполнительного механизма содержит измерение напряжения на исполнительном механизме и тока через исполнительный механизм во время работы.
Согласно четвертому аспекту по изобретению предусмотрен компьютерный программный продукт, содержащий машиночитаемый носитель, который имеет воплощенный в нем код компьютерной программы, код компьютерной программы содержит код, который при исполнении посредством компьютера или процессора выполнен с возможностью управлять компьютером или процессором для того, чтобы осуществлять стадии в каком-либо из описанных выше способов.
Согласно пятому аспекту по изобретению предусмотрен блок управления для управления работой небулайзера, где блок управления выполнен с возможностью работы небулайзера на его нерезонансной частоте, чтобы предоставлять необходимую или максимальную скорость выдачи распыленной жидкости.
Может быть предусмотрен небулайзер, который содержит блок управления, как описано в пятом аспекте; камеру резервуара для хранения жидкости, подлежащей распылению; и исполнительный механизм для того, чтобы вызывать распыление жидкости, хранимой в камере резервуара. Небулайзер может дополнительно содержать распыляющий элемент, расположенный в резервуаре, для распыления жидкости, когда активируют исполнительный механизм.
Согласно шестому аспекту по изобретению предоставлен способ управления небулайзером, который включает в себя работу небулайзера на его нерезонансной частоте, чтобы предоставить необходимую или максимальную скорость выдачи распыленной жидкости.
В приведенных выше пятом и шестом аспектах по изобретению следует принимать во внимание, что резонансная частота небулайзера соответствует частоте, на которой в небулайзере происходит максимальный перенос мощности (т.е. частота, при которой импеданс минимален).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, только в качестве примера, описаны иллюстративные варианты осуществления изобретения со ссылкой на следующие чертежи, на которых:
на фиг.1 представлено давление на сетке при различных частотах вибрации пьезоэлектрического элемента и различных расстояниях между пьезоэлектрическим элементом и сеткой;
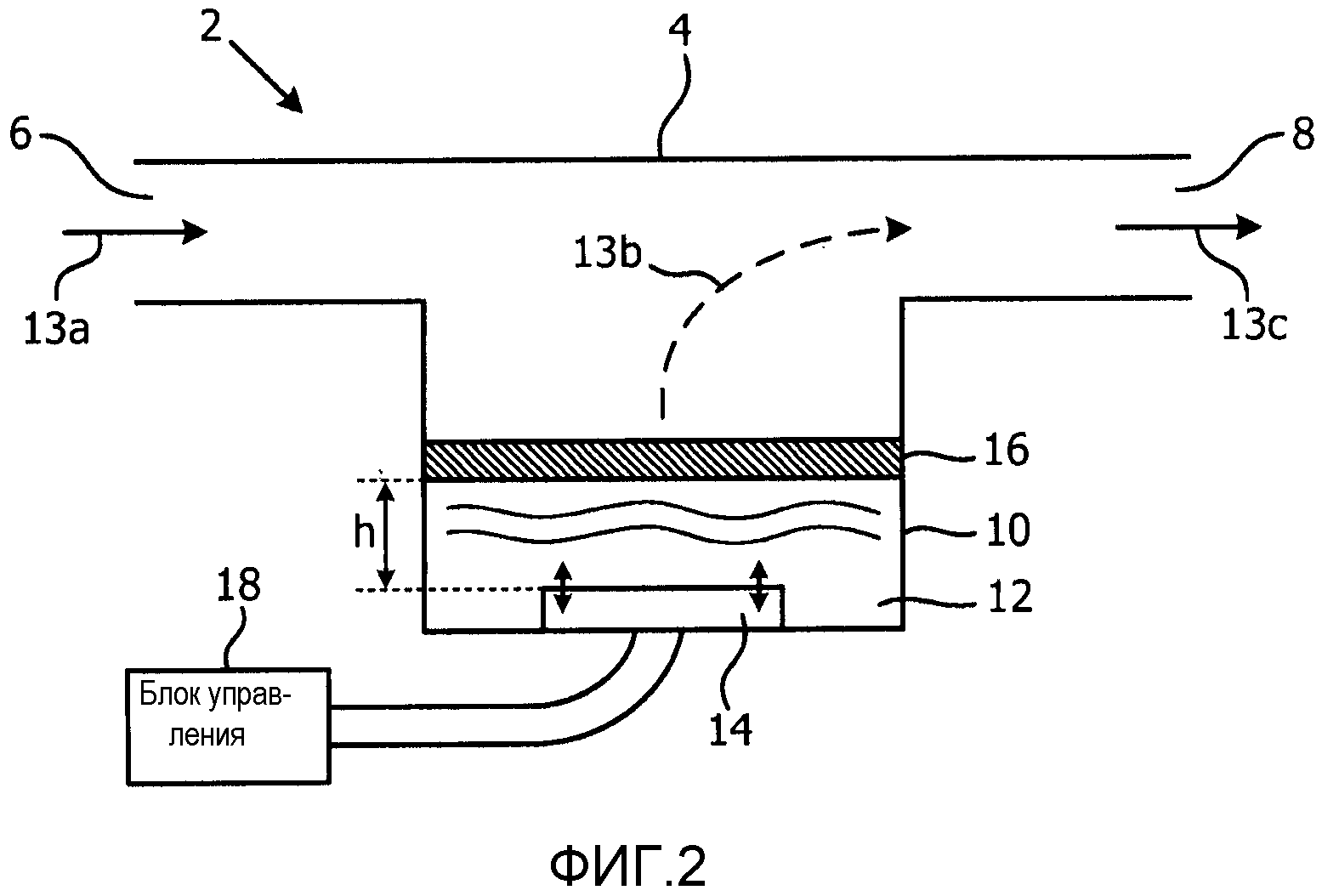
на фиг.2 представлена блочная диаграмма небулайзера согласно одному из вариантов осуществления изобретения;
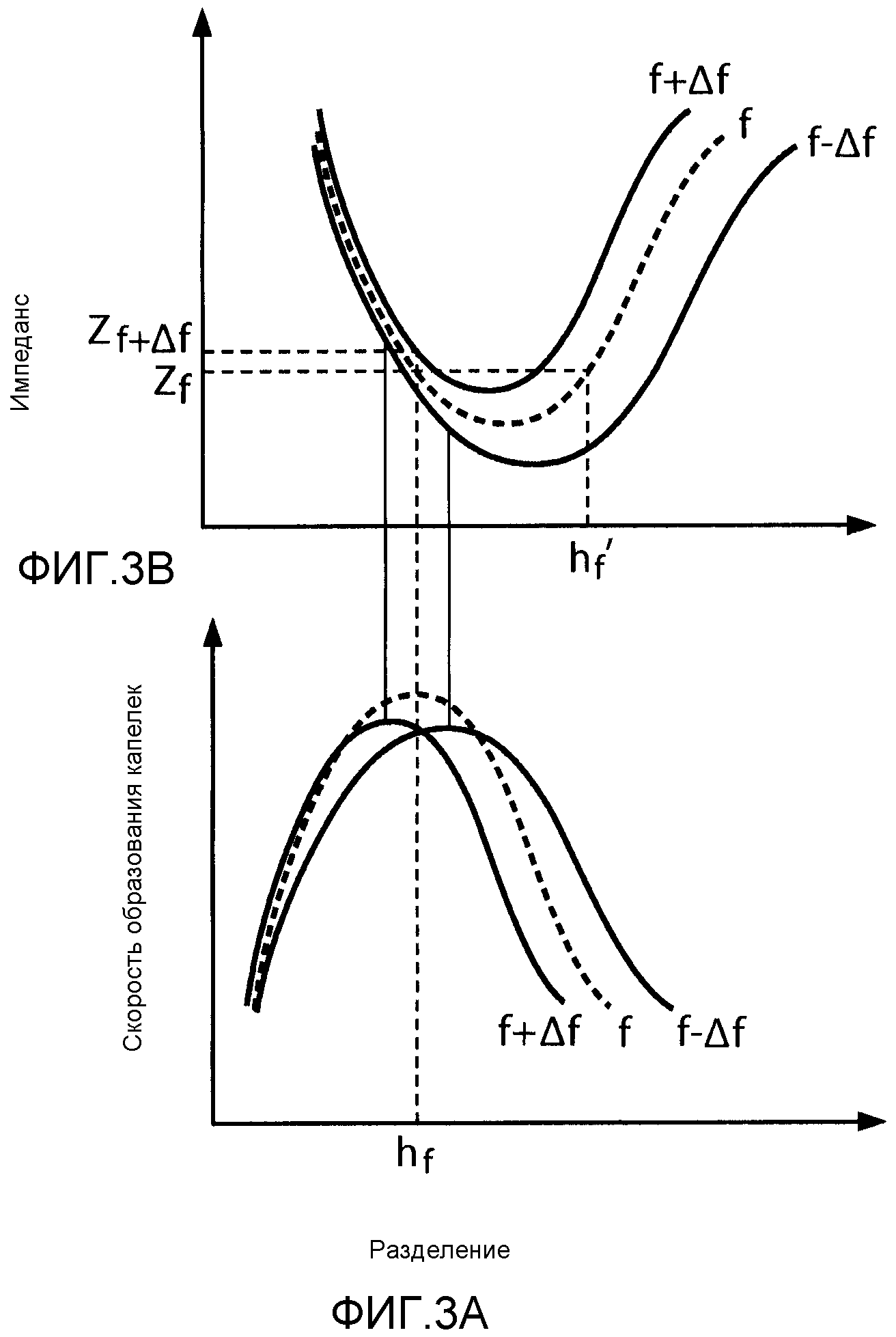
на фиг.3A и B представлены графики, которые иллюстрируют вариации в скорости образования капелек и импедансе пьезоэлектрического элемента при измерении в разделении между пьезоэлектрическим элементом и распыляющим элементом;
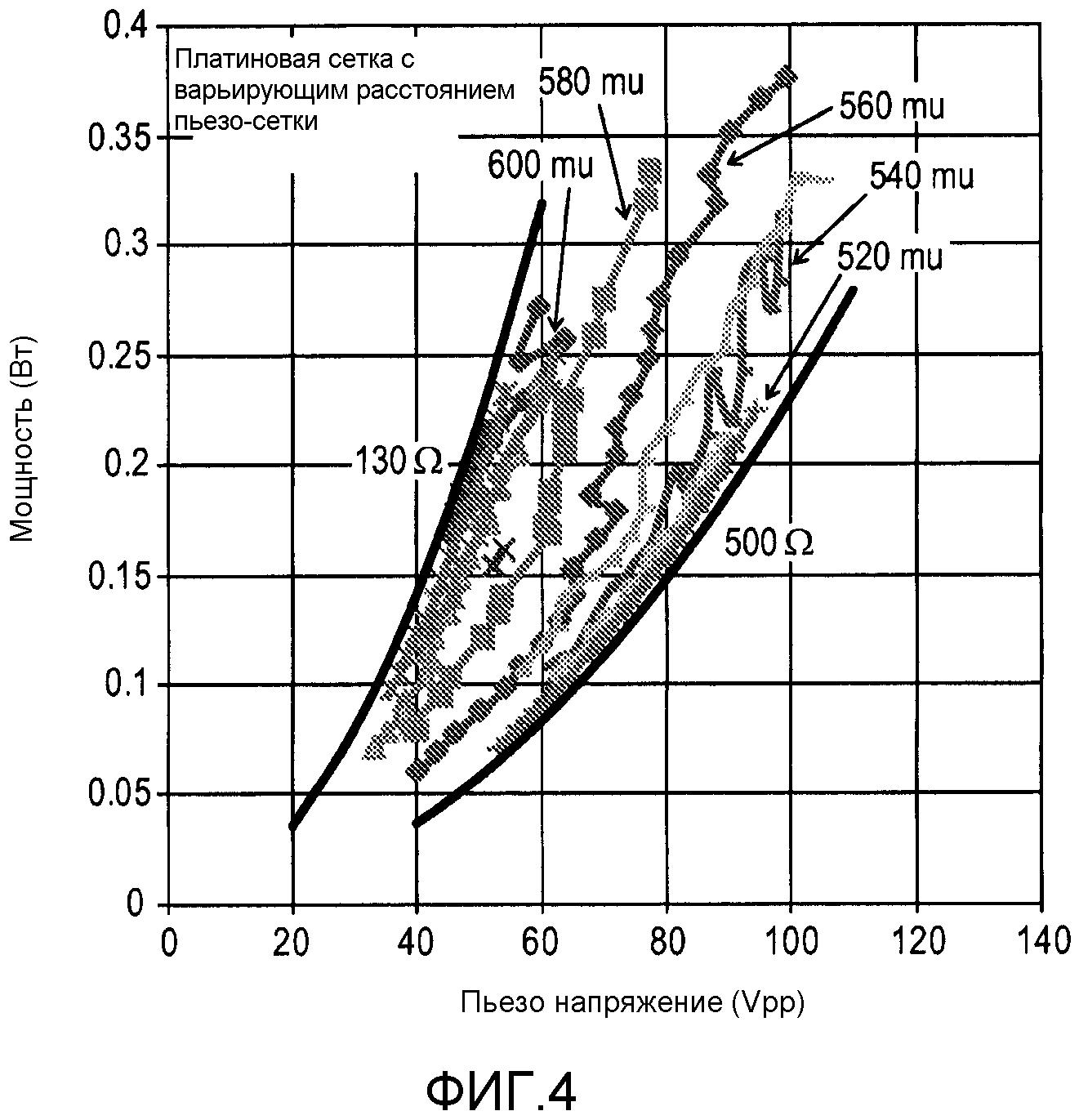
на фиг.4 представлен график, который иллюстрирует, как мощность, подаваемая на пьезоэлектрический элемент, меняется с размахом напряжения на пьезоэлектрическом элементе для различных расстояний между пьезоэлектрическим элементом и распыляющим элементом;
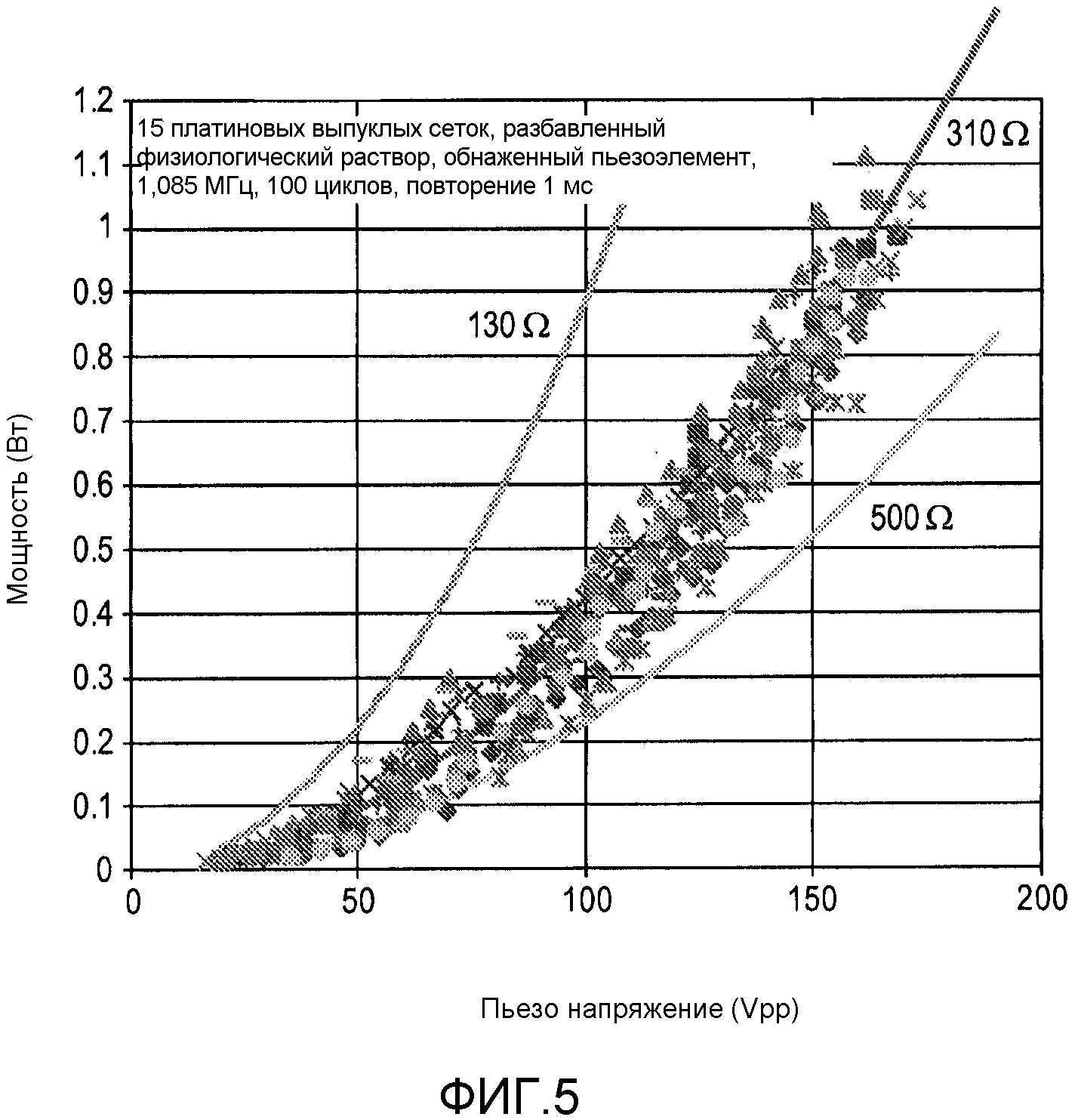
на фиг.5 представлен график, который иллюстрирует, как мощность, подаваемая на пьезоэлектрический элемент, меняется с размахом напряжения на пьезоэлектрическом элементе для множества различных платиновых сеток, каждая из которых расположена в правильном положении в небулайзере;
на фиг. 6A-6D представлены блок-схемы, которые иллюстрируют способ управления небулайзером согласно одному из вариантов осуществления изобретения; и
на фиг.7 представлена блок-схема, которая иллюстрирует альтернативный способ управления небулайзером согласно одному из вариантов осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Небулайзер 2 согласно одному из вариантов осуществления изобретения показан на фиг.2. Небулайзер 2 содержит корпус 4, который имеет впуск 6 и выпуск 8, расположенные так, чтобы, когда пользователь небулайзера 2 вдыхает через выпуск 8, воздух входил внутрь и через небулайзер 2 через впуск 6 и выпуск 8, и внутрь организма пользователя. В некоторых вариантах осуществления выпуск 8 предоставлен в форме мундштука или лицевой или носовой маски. Альтернативно, выпуск 8 может быть выполнен так, чтобы сделать возможным соединение с отдельным заменяемым мундштуком или лицевой или носовой маской.
Камера резервуара 10 для хранения жидкости 12, например медикамента или лекарственного средства, подлежащего распылению (т.е. подлежащего превращению в мелкодисперсный туман или спрей), предусмотрена в корпусе 4 небулайзера 2 между впуском 6 и выпуском 8. Небулайзер 2 выполнен так, что мелкие капельки распыляемой жидкости 12 объединяются с воздухом, входящим через небулайзер 2, когда пользователь делает вдох, чтобы доставлять дозу медикамента или лекарственного средства пользователю. Эта операция проиллюстрирована стрелкой 13a (которая представляет воздух, который входит внутрь небулайзера 2 через впуск 6), стрелкой 13b (которая представляет жидкость, распыляемую из камеры резервуара 10) и стрелкой 13c (которая представляет воздух, содержащий распыляемую жидкость, которая выходит из небулайзера 2 с помощью пользователя через выпуск 8).
Исполнительный механизм 14 для создания колебания или вибрации в жидкости 12, содержащейся в камере резервуара 10, предусмотрен в камере резервуара 10 наряду с распыляющим элементом 16 для распыления жидкости 12, когда в жидкости 12 создают вибрацию. Исполнительный механизм 14 предоставлен на или близко ко дну камеры резервуара 10, а распыляющий элемент 16 расположен в камере резервуара 10 выше и находится на расстоянии от исполнительного механизма 14. Распыляющий элемент 16 находится от исполнительного механизма 14 на расстоянии h, которое упоминается как «уровень воды», поскольку жидкость 12 заполняет камеру резервуара 10 вплоть до уровня распыляющего элемента 16. Следует принимать во внимание, что жидкость 12 в камере резервуара 10 будет расходоваться по мере работы небулайзера 2 и необходимо добавлять больше жидкости 12 в камеру резервуара 10, чтобы поддерживать жидкость 12 на уровне h для небулайзера 2, чтобы продолжать работу. Следовательно, небулайзер 2 может содержать дополнительную камеру или соединяться с дополнительной камерой (не показана на фиг.2), в которой содержится жидкость для восполнения жидкости 12 в камере резервуара 10. Жидкость из дополнительной камеры может течь внутрь камеры резервуара 10 в связи с действием силы притяжения и наполнением капилляров.
В вариантах осуществления изобретения, которые дополнительно описаны ниже, исполнительный механизм 14 предоставлен в виде пьезоэлектрического элемента. Однако специалистам в области небулайзеров должно быть ясно, что можно использовать другие формы исполнительного механизма 14 в небулайзерах в соответствии с изобретением. Также следует понимать, что пьезоэлектрический элемент 14 может быть покрыт слоем пластмассового или металлического покрытия, чтобы избежать непосредственного контакта между пьезоэлектрическим элементом и жидкостью 12.
В предпочтительных вариантах осуществления изобретения распыляющий элемент 16 представлен в виде сетки или мембраны, которая имеет множество маленьких отверстий, через которые могут проходить небольшие количества жидкости. В одном конкретном варианте осуществления сетка или мембрана содержит около 5000 мкм2 отверстий, через которые могут проходить капли жидкости при активировании исполнительного механизма 14.
Снова со ссылкой на фиг.2, небулайзер 2 дополнительно содержит блок управления 18, который содержит схему для управления работой небулайзера 2. В частности, блок управления 18 соединен с исполнительным механизмом 14 и, при необходимости, активирует и деактивирует исполнительный механизм 14.
В некоторых вариантах осуществления блок управления 18 представляет собой встроенный компонент небулайзера 2 внутри корпуса 4 небулайзера 2. Однако в альтернативных вариантах осуществления блок управления 18 может быть предоставлен в блоке, который отделен и даже является отсоединяемым от корпуса 4 небулайзера 2.
Как описано выше, достижение согласованной работы небулайзера 2 основано на точном изменении положения распыляющего элемента 16 в небулайзере 2 после очистки или замены. Кроме того, если положение распыляющего элемента 16 не изменено правильно, небулайзер 2 может не функционировать вовсе или компоненты небулайзера 2 могут быть повреждены при попытке работы. Следовательно, в соответствии с изобретением блок управления 18 выполнен с возможностью определять, находится ли распыляющий элемент 16 в правильном положении в небулайзере 2 и, в частности, находится ли в правильном положении относительно исполнительного механизма 14.
Как описано выше, на фиг.1 проиллюстрировано давление, создаваемое на распыляющем элементе 16 в небулайзере 2, для различных частот вибрации пьезоэлектрического элемента 14 и различных расстояний между пьезоэлектрическим элементом 14 и распыляющим элементом 16, и можно видеть, что отклонение всего в десятки микрометров (десятки микронов) от оптимального положения может оказывать значительное влияние на давление на распыляющем элементе 16 и, следовательно, на скорость образования капелек.
Эти результаты проиллюстрированы в альтернативной форме на фиг.3A, на которой показаны вариации в скорости образования капелек в зависимости от расстояния между пьезоэлектрическим элементом 14 и распыляющим элементом 16 для трех различных частот вибрации для пьезоэлектрического элемента 14.
Обнаружено, что импеданс пьезоэлектрического элемента 14 в небулайзере 2 (и, более конкретно, вещественная часть комплексного импеданса пьезоэлектрического элемента 14) связан с положением распыляющего элемента 16 в небулайзере 2 относительно пьезоэлектрического элемента 14. Эти полученные данные проиллюстрированы в комбинации графиков на фиг.3A и B, которые имеют общую ось x. Таким образом, на фиг.3B можно видеть, что импеданс пьезоэлектрического элемента 14 варьирует в зависимости от разделения между пьезоэлектрическим элементом 14 и распыляющим элементом 16 (а также в зависимости от частоты работы пьезоэлектрического элемента 14). Также можно видеть, что импеданс пьезоэлектрического элемента 14 имеет конкретное значение, когда скорость образования капелек оптимальна (и следует отметить, что это значение импеданса не является максимальным или минимальным значением импеданса, но является промежуточным значением). Следовательно, в соответствии с изобретением, измерение импеданса можно использовать для того, чтобы определять, находится ли распыляющий элемент 16 в правильном положении в небулайзере 2 (т.е. распыляющий элемент 16 находится в положении, где осуществляется оптимальная или близкая к оптимальной эффективность образования капелек).
Также следует понимать, что минимальное значение импеданса возникает, когда небулайзер 2 (в частности, камера резервуара 10, пьезоэлектрический элемент 14 и распыляющий элемент 16) находятся в резонансе, который возникает на конкретной частоте, при которой происходит максимальный перенос энергии (т.е. мощность находится на максимуме). Таким образом, на фиг.3(a) и (b) можно видеть, что оптимальная скорость образования капелек соответствует промежуточному значению импеданса и, следовательно, оптимальную скорость образования капелек достигают посредством работы небулайзера 2 на частоте, отличной от резонансной частоты (и, таким образом, где импеданс не является минимальным и мощность не является максимальной).
Дополнительно обнаружено, что оптимальное значение импеданса для пьезоэлектрического элемента 14 (т.е. значение импеданса для пьезоэлектрического элемента 14, которое соответствует правильному расположению распыляющего элемента 16 в небулайзере 2 относительно пьезоэлектрического элемента 14) обладает специфичностью в зависимости от распыляющего элемента, т.е. варьирует для различных типов и/или конфигураций распыляющего элемента 16. В этом отношении различные типы и/или конфигурации могут иметь отношение к используемому материалу для получения распыляющего элемента 16, толщине распыляющего элемента 16 и числу и/или размеру отверстий в распыляющем элементе 16. В некоторых вариантах осуществления изобретения пользователь небулайзера 2 может программировать блок управления 18 с использованием подходящего значения импеданса для распыляющего элемента 16, или блок управления 18 может автоматически получать информацию из электронного чипа данных (не показан на фиг.2), связанную с конкретной жидкостью (т.е. медикаментом) в камере резервуара 10 и/или распыляющим элементом 16 (например, как используют в доступном в настоящее время небулайзере Philips Respironics I-neb).
График на фиг.4 иллюстрирует, как мощность (в ваттах), подаваемая на пьезоэлектрический элемент 14, меняется в зависимости от размаха напряжения (Vpp) на пьезоэлектрическом элементе 14 для различных расстояний между пьезоэлектрическим элементом 14 и платиновой сеткой, имеющей конкретную толщину, которую используют в качестве распыляющего элемента 16.
Теоретически, для импеданса, зависящего от напряжения, зависимость между мощностью и напряжением должна представлять собой квадратическую функцию, полностью определяемую вещественной частью импеданса. Как показано на фиг.4, в эксперименте наблюдаются квадратические зависимости, из которых определяли значения импеданса между 130 Ом и 500 Ом. Таким образом, на фиг.4 проиллюстрировано, как импеданс пьезоэлектрического элемента 14 зависит от расстояния между пьезоэлектрическим элементом 14 и платиновой сеткой 16.
На фиг.5 график иллюстрирует, как мощность (в ваттах), подаваемая на пьезоэлектрический элемент 14, меняется в зависимости от размаха напряжения (Vpp) на пьезоэлектрическом элементе 14 для множества (пятнадцати) различных платиновых сеток, каждая из которых находится в правильном (оптимальном) положении или положении, близком к оптимальному, в небулайзере 2. Таким образом, на фиг.5 можно видеть, что для максимального (или почти максимального) образования капелек для этих платиновых сеток, импеданс пьезоэлектрического элемента 14 представляет собой значение, равное или приблизительно равное 310 Ом.
Как описано выше, оптимальное значение импеданса для конкретного распыляющего элемента 16 зависит от композиции распыляющего элемента 16. Например, обнаружено, что сетки, выполненные из никеля-палладия (NiPd), проявляют схожее поведение с платиновыми сетками, описанными выше, но обнаружено, что оптимальное значение импеданса для этих сеток составляет 600 Ом.
В целом оптимальное значение импеданса для конкретного распыляющего элемента 16 будет определяться посредством тестирования перед любым использованием распыляющего элемента 16 конкретного типа в небулайзере 2. Когда оптимальное значение импеданса определено, это значение будет применимо ко всем другим сеткам, которые получают из того же материала и которые имеют такую же геометрию.
Работа блока управления 18 в соответствии с изобретением описана более подробно ниже со ссылкой на фиг. 6A-6D. Способ, описанный ниже, можно инициировать посредством блока управления 18, когда распыляющий элемент 16 сначала располагают в небулайзере 2, когда пользователь пытается использовать небулайзер 2 и/или во время использования небулайзера 2.
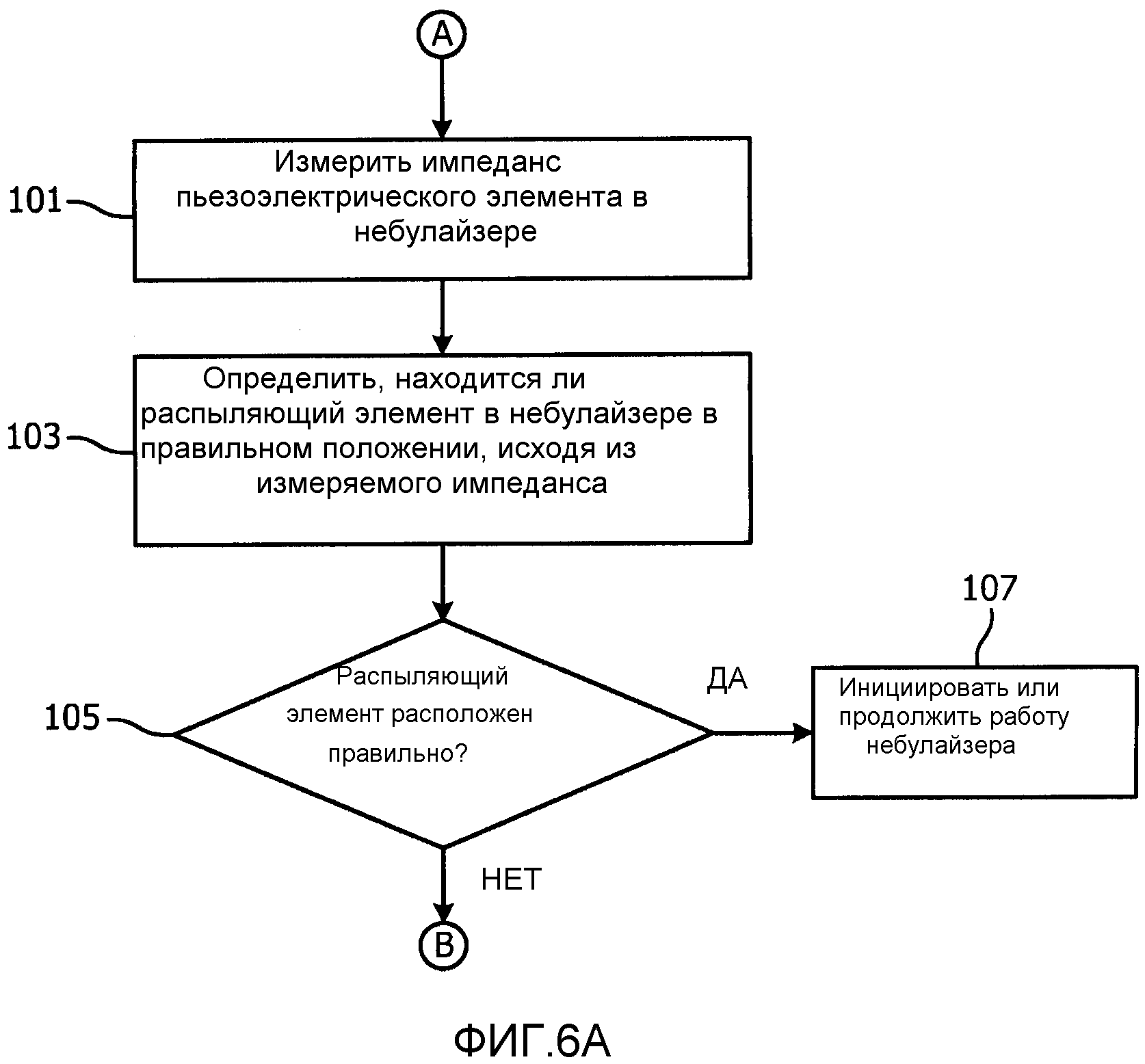
Сначала, со ссылкой на фиг.6A, работу в соответствии с изобретением начинают на стадии 101, на которой импеданс пьезоэлектрического элемента 14 в небулайзере 2 измеряют посредством блока управления 18. В частности, блок управления 18 измеряет вещественную часть комплексного импеданса пьезоэлектрического элемента 14. Следует принимать во внимание, что это измерение осуществляют, когда жидкость 12 присутствует в камере резервуара 10.
Следует понимать, что стадию 101 можно осуществлять посредством блока управления 18 до того, как активируют небулайзер 2 (т.е. до того, как подают достаточный ток на пьезоэлектрический элемент 14, чтобы вызвать распыление жидкости 12), или во время работы небулайзера 2 (т.е. когда пьезоэлектрический элемент 14 вызывает распыление жидкости 12).
В первом случае блок управления 18 может подавать небольшое синусоидальное напряжение, которое имеет известную амплитуду Vamp, на пьезоэлектрический элемент 14 (напряжение является небольшим в том смысле, что оно ниже напряжения, необходимого для того, чтобы заставить пьезоэлектрический элемент 14 распылять жидкость 12) и измерять получаемый ток Iamp и фазовый сдвиг φamp между сигналом подаваемого напряжения и сигналом получаемого тока.
Затем блок управления 18 может вычислять вещественную часть импеданса пьезоэлектрического элемента 14 с использованием:

Альтернативно, во втором случае, описанном выше (т.е. измерение импеданса во время работы небулайзера 2), блок управления 18 может определить импеданс во время работы для произвольных управляющих сигналов. В этом случае блок управления 18 определяет вещественную часть импеданса пьезоэлектрического элемента 14 по напряжению, подаваемому на элемент 14 с течением времени, V(t), и измеряемому току через элемент 14 с течением времени, I(t), с использованием:

Когда импеданс пьезоэлектрического элемента 14 измерен, тогда блок управления 18 использует измеряемое значение импеданса для того, чтобы определять, находится ли распыляющий элемент 16 в правильном положении в небулайзере 2 (стадия 103). Придерживаясь анализа, такого как тот, что проиллюстрирован выше на фиг.5, оптимальное значение импеданса для распыляющего элемента 16, которое ведет к оптимальной или близкой к оптимальной эффективности образования капелек, будет известно до размещения распыляющего элемента 16 в небулайзере 2. Следовательно, на стадии 103 блок управления 18 может сравнивать измеряемое значение импеданса с известным оптимальным значением импеданса для того, чтобы определять, находится ли распыляющий элемент 16 в правильном положении в небулайзере 2.
В одном из вариантов осуществления блок управления 18 может определять, что распыляющий элемент 16 находится в правильном положении, если измеряемое значение импеданса находится в заданном диапазоне оптимальных значений импеданса. Следует понимать, что заданный диапазон можно точно определять в отношении конкретного значения процентной доли от оптимального значения импеданса (т.е. измеряемый импеданс должен находиться, например, в пределах 1%, 5% или 10% от оптимального значения импеданса для того, чтобы блок управления 18 определял, что распыляющий элемент 16 находится в правильном положении), или в значениях конкретного диапазона значений импеданса около оптимального значения импеданса (т.е. для описанной выше платиновой сетки заданный диапазон для определения правильного положения может составлять, например, между 280 Ом и 340 Ом).
Если блок управления 18 определяет, что распыляющий элемент 16 находится в правильном положении в небулайзере 2 (стадии 103 и 105), то блок управления 18 может инициировать (или продолжить) работу небулайзера 2 посредством подачи достаточного сигнала напряжения на пьезоэлектрический элемент 14 (стадия 107). Блок управления 18 делает возможной работу небулайзера 2 до тех пор, пока пользователь не перестанет дышать через небулайзер 2 или не будет распылена необходимая доза медикамента или лекарственного средства в жидкости.
Если блок управления 18 определяет, что распыляющий элемент 16 не находится в правильном положении в небулайзере 2, основываясь на измеряемом импедансе (стадии 103 и 105), то блок управления 18 выполняет дополнительное действие, как описано более подробно ниже.
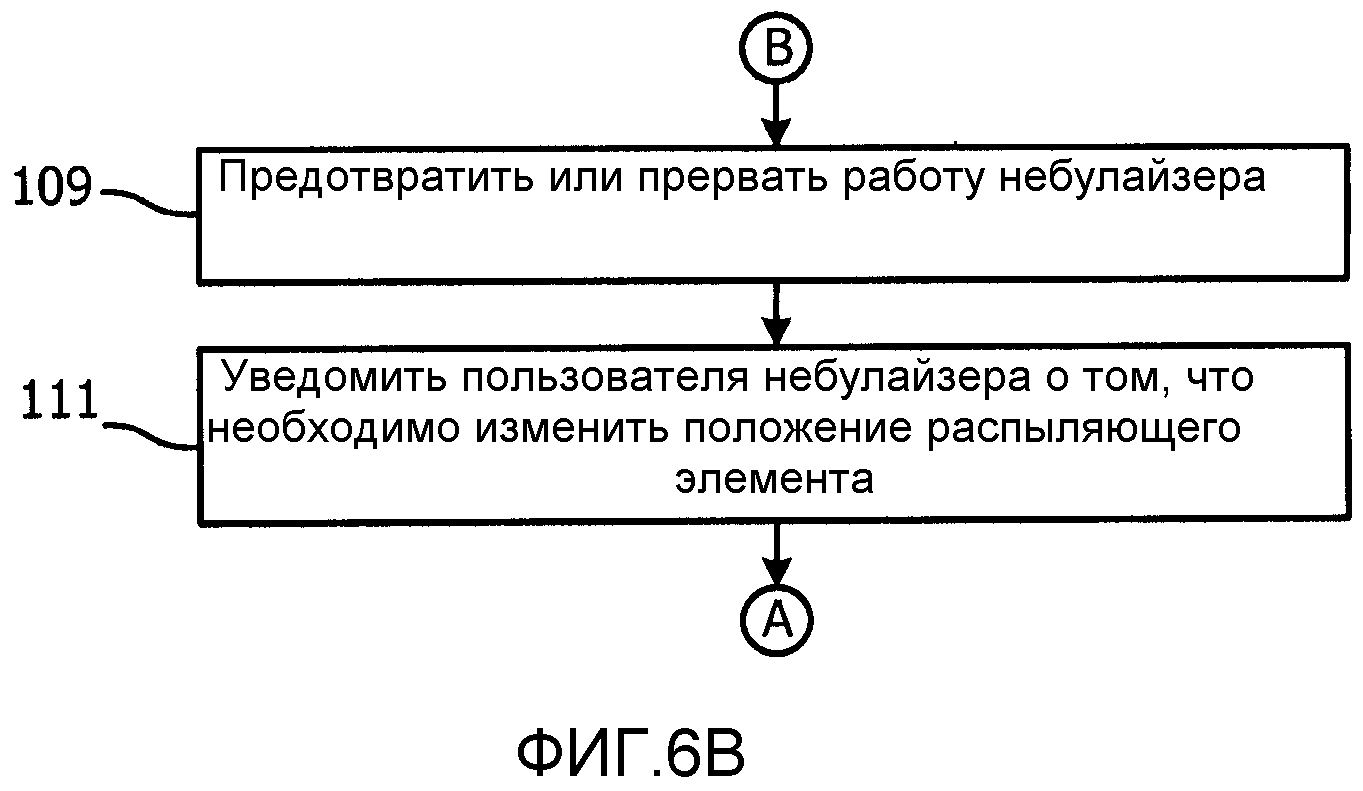
В одной реализации небулайзера 2, как проиллюстрировано на фиг.6B, при определении, что распыляющий элемент 16 не находится в правильном положении, блок управления 18 предотвращает или прекращает работу небулайзера 2 (т.е. посредством непредоставления сигнала напряжения на пьезоэлектрический элемент 14) для того, чтобы предотвратить субоптимальную эффективность образования капелек и чтобы избежать какого-либо возможного повреждения компонентов небулайзера 2 (стадия 109).
Затем блок управления 18 может уведомлять пользователя небулайзера 2 о том, что распыляющий элемент 16 находится в неправильном положении и необходимо изменить положение до того, как небулайзер 2 сможет работать должным образом. Блок управления 18 может уведомлять пользователя об этом каким-либо стандартным образом, например, посредством инициации слышимого сигнала тревоги, предупреждающего сигнала или произносимого сообщения, и/или посредством предоставления визуальной индикации, такой как предупреждающий световой сигнал или LED, или посредством предоставления написанного сообщения или символа на дисплее небулайзера 2 (не показан на фиг.2).
Если пользователь изменяет положение распыляющего элемента 16 в небулайзере 2, блок управления 18 может возвращаться к стадии 101 и повторять измерение импеданса пьезоэлектрического элемента 14. Если это измерение указывает на то, что распыляющий элемент 14 находится в правильном положении в небулайзере 2, то блок управления 18 может инициировать работу небулайзера 2, как показано на стадии 107.
В альтернативной реализации небулайзера 2, как проиллюстрировано на фиг.6C, при определении того, что распыляющий элемент 16 не находится в правильном положении, блок управления 18 может корректировать сигнал напряжения, подаваемый на пьезоэлектрический элемент 14, чтобы изменять частоту вибрации пьезоэлектрического элемента 14, тем самым повышая эффективность небулайзера 2 (стадия 113). В частности, как продемонстрировано на графиках на фиг.1 и 3, поскольку имеет место корреляция между расстоянием между пьезоэлектрическим элементом 14 и распыляющим элементом 16 (уровень воды) и частотой, на которой вибрирует пьезоэлектрический элемент 14, небольшие отклонения уровня воды от оптимального значения можно компенсировать посредством блока управления 18, корректирующего частоту вибрации пьезоэлектрического элемента 14.
В одном из вариантов осуществления блок управления 18 может корректировать частоту вибрации пьезоэлектрического элемента 14 на некоторое количество, определяемое с использованием измеряемого значения импеданса и таблицы соответствия. В альтернативном варианте осуществления блок управления 18 может корректировать частоту вибрации пьезоэлектрического элемента 14 на количество, основанное на величине разности между измеряемым значением импеданса и оптимальным значением импеданса. В другом альтернативном варианте осуществления блок управления 18 может корректировать частоту вибрации пьезоэлектрического элемента 14 на фиксированное количество независимо от разности между измеряемым значением импеданса и оптимальным значением.
В вариантах осуществления, описанных в параграфе выше, блок управления 18 затем может возвращаться к стадии 101 и повторно измерять импеданс пьезоэлектрического элемента 14 для того, чтобы определять, можно ли разрешить работу небулайзера 2. Если нельзя, блок управления 18 может повторять стадии 101, 103, 105 и 113 до тех пор, пока эффективность образования капелек небулайзера 2 не достигнет приемлемого значения.
В одном из вариантов осуществления, поскольку изменена частота вибрации пьезоэлектрического элемента 14, возможно на описанной стадии повторного измерения использовать модифицированное оптимальное значение импеданса. В варианте осуществления, где используют таблицу соответствия, таблица соответствия может содержать данные, соответствующие тем, что представлены на фиг.3A и 3B, что означает, что блок управления 18 использует измеряемый импеданс для поиска (i) фактического разделения между пьезоэлектрическим элементом 14 и распыляющим элементом 16, (ii) оптимальной задающей частоты и (iii) соответствующего модифицированного оптимального импеданса.
В некоторых вариантах осуществления, если блок управления 18 определяет, что корректировка частоты вибрации пьезоэлектрического элемента 14 не обеспечит приемлемую эффективность образования капелек (например, основываясь на разности между измеряемым значением импеданса и оптимальным значением импеданса, превышающей порог, или после одного или нескольких повторений стадий 101, 103, 105 и 113, которые не привели к достижению требуемой эффективности), то блок управления может осуществлять стадии 109 и 111 и уведомлять пользователя небулайзера 2 о том, что положение распыляющего элемента 16 в небулайзере 2 нужно изменить вручную.
В еще одной другой альтернативной реализации небулайзера 2, как проиллюстрировано на фиг.6D, сам блок управления 18 может корректировать положение распыляющего элемента 16 в небулайзере 2, если он определяет, что распыляющий элемент 16 не находится в правильном положении в небулайзере 2. В этом варианте осуществления в небулайзере 2 предусмотрен дополнительный исполнительный механизм, который можно использовать для того, чтобы корректировать относительные положения распыляющего элемента 16 и пьезоэлектрического элемента 14 в небулайзере 2. Предпочтительно, дополнительный исполнительный механизм выполнен с возможностью перемещать распыляющий элемент 16 в небулайзере 2 под управлением блока управления 18, но следует понимать, что в альтернативных реализациях вместо этого можно использовать дополнительный исполнительный механизм для перемещения пьезоэлектрического элемента 14. Специалистам в данной области известны подходящие исполнительные механизмы, которые можно предусмотреть в небулайзере 2 для перемещения распыляющего элемента 16 или пьезоэлектрического элемента 14, и, следовательно, в настоящем документе не будут предоставлены дополнительные подробности.
При определении того, что распыляющий элемент 16 не находится в правильном положении, блок управления 18 может управлять дополнительным исполнительным механизмом для того, чтобы корректировать относительное положение распыляющего элемента 16 относительно пьезоэлектрического элемента 14 (т.е. посредством перемещения распыляющего элемента 16 ближе к или дальше от пьезоэлектрического элемента 14), тем самым заставляя импеданс пьезоэлектрического элемента 14 приближаться к оптимальному значению импеданса и повышая эффективность небулайзера 2 (стадия 115 на фиг.6D).
В одном из вариантов осуществления блок управления 18 может управлять дополнительным исполнительным механизм для того, чтобы корректировать положение распыляющего элемента 16 на определенное количество, основанное на величине разности между измеряемым значением импеданса и оптимальным значением импеданса. В альтернативном варианте осуществления блок управления 18 может управлять дополнительным исполнительным механизмом для того, чтобы корректировать положение распыляющего элемента 16 на фиксированное количество, независимо от разности между измеряемым значением импеданса и оптимальным значением.
В обоих вариантах осуществления, описанных в параграфе выше, блок управления 18 может затем возвращаться к стадии 101 и повторно измерять импеданс пьезоэлектрического элемента 14 для того, чтобы определять, может ли быть разрешена работа небулайзера 2. Если нет, блок управления 18 может повторять стадии 101, 103, 105 и 115 до тех пор, пока эффективность образования капелек небулайзера 2 не достигнет приемлемого значения.
В некоторых вариантах осуществления, если блок управления 18 определяет, что корректировка положения распыляющего элемента 16 не обеспечит приемлемой эффективности образования капелек (например, основываясь на разности между измеряемым значением импеданса и оптимальным значением импеданса, превышающей порог, или после одного или нескольких повторений стадий 101, 103, 105 и 115, которые не ведут к достижению требуемой эффективности), то блок управления может осуществлять стадии 109 и 111 и уведомлять пользователя небулайзера 2 о том, что необходимо положение распыляющего элемента 16 в небулайзере 2 изменить вручную.
Также следует понимать, что может быть предусмотрен блок управления 18, который может реализовать оба варианта осуществления, представленные на фиг.6C и 6D. В этом случае, когда блок управления 18 определяет, что распыляющий элемент 16 не находится в правильном положении в небулайзере 2, блок управления 18 может корректировать как частоту вибрации пьезоэлектрического элемента 14, так и положение распыляющего элемента 16 в небулайзере 2 для того, чтобы повышать эффективность образования капелек небулайзера 2.
Снова со ссылкой на фиг.3B следует отметить, что максимальную скорость образования капелек для пьезоэлектрического элемента 14, работающего на частоте f, получают при разделении hf, и пьезоэлектрический элемент 14 имеет импеданс Zf. Как описано выше в вариантах осуществления, возможно определять, находится ли распыляющий элемент 16 в правильном положении посредством измерения импеданса пьезоэлектрического элемента 14 и сравнения его с оптимальным значением (т.е. Zf). Однако на фиг.3B следует отметить, что «оптимальное» значение импеданса Zf фактически соответствует двум возможным расстояниям (hf и hf') между пьезоэлектрическим элементом 14 и распыляющим элементом 16.
Далее, возможно, что второе возможное расстояние hf' не может иметь место в небулайзере 2 (например, hf' может быть больше, чем размеры камеры резервуара 10), и в этом случае возможность того, что распыляющий элемент 16 и пьезоэлектрический элемент 14 разделяют этим расстоянием (hf'), можно игнорировать в реализации способа, проиллюстрированного на фиг.6A.
Однако также возможно, что второе возможное расстояние hf' может иметь место, и в этом случае исполнение способа, показанного на фиг.6A, может привести к ложноположительному результату (т.е. блок управления 18 может определять, что распыляющий элемент 16 находится в правильном положении, когда это не так). Поэтому альтернативный способ работы небулайзера 2 представлен на фиг.7.
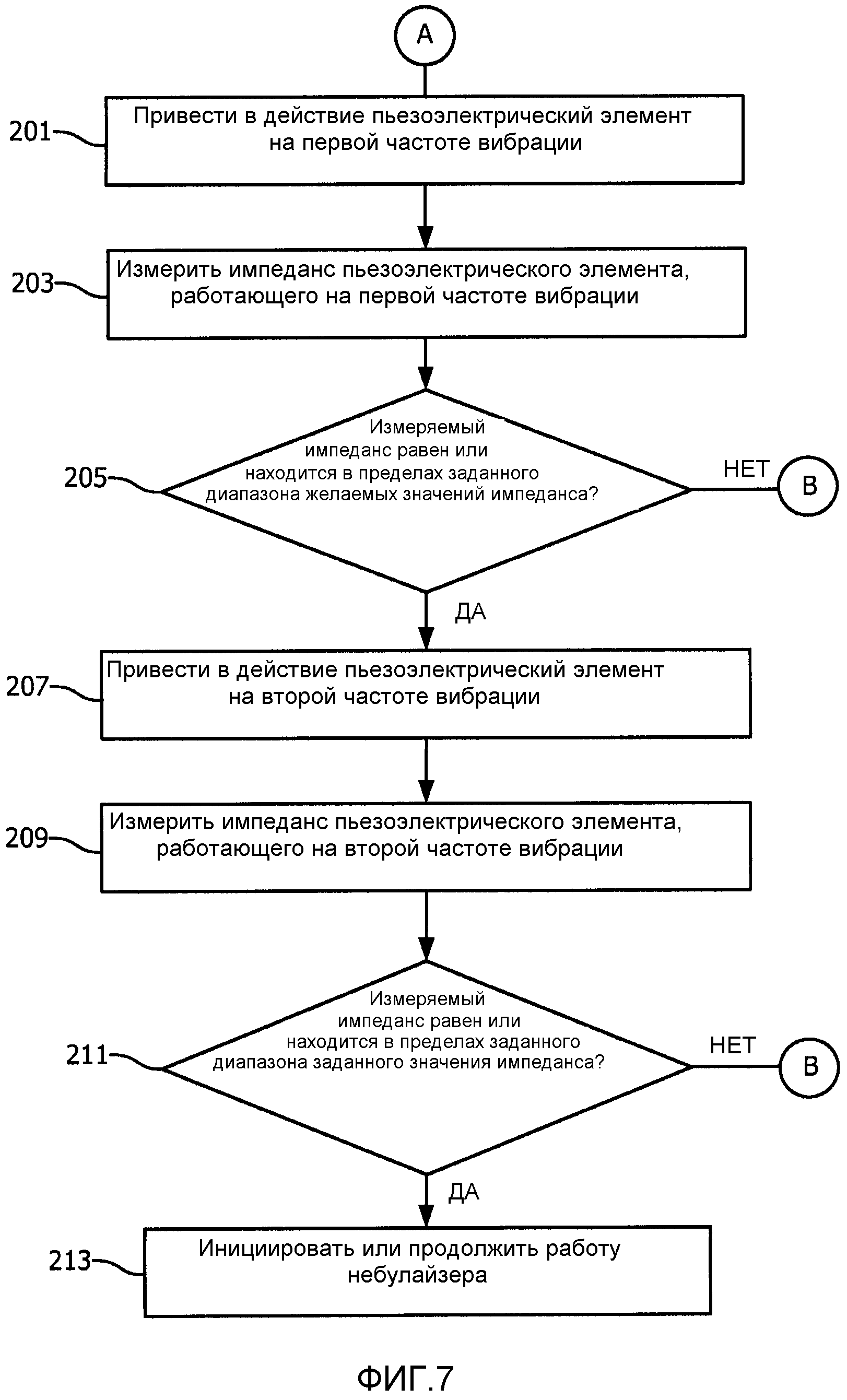
На стадии 201 пьезоэлектрический элемент 14 работает на первой частоте вибрации. В некоторых случаях она может представлять собой частоту f, т.е. частоту, при которой получают лучшую эффективность образования капелек (следует обратить внимание на различные максимальные скорости образования капелек для различных частот вибрации на фиг.3A).
Затем на стадии 203 измеряют импеданс пьезоэлектрического элемента 14. Эту стадию измерения можно осуществлять таким же образом, как стадию 101 на фиг.6A.
Затем блок управления 18 определяет, равен ли или находится ли измеряемый импеданс в заданном диапазоне желаемых значений импеданса для первой частоты f (т.е. Zf) на стадии 205. Если нет, блок управления 18 может продолжать, как показано на любой из фиг.6B, 6C и 6D, описанных выше, возвращением процесса к стадии 201, если необходимо повторно измерить импеданс.
Если измеряемый импеданс равен или близок к желаемому значению импеданса Zf, блок управления 18 приводит в действие пьезоэлектрический элемент 14 на второй частоте вибрации, отличной от первой частоты (стадия 207), например, f+Δf или f-Δf, показанной на фиг.3A и 3B, и повторно измеряет импеданс пьезоэлектрического элемента 14 (стадия 209). В одном из вариантов осуществления вторая частота может отличаться от первой частоты приблизительно на 0,2%, хотя следует понимать, что можно использовать большие и меньшие разности частот.
На стадии 211 блок управления 18 определяет, равно ли или находится ли значение импеданса, измеряемое на стадии 209, в заданном диапазоне значений импеданса, подходящих для второй частоты и разделения hf. Например, если вторая частота составляет f+Δf, блок управления 18 определяет, равно ли или находится ли значение импеданса, измеряемое на стадии 209, в заданном диапазоне Zf+Δf.
Если значение импеданса, измеряемое на стадии 209, находится в пределах заданного диапазона значений импеданса, подходящих для второй частоты и разделения hf, блок управления 18 может инициировать или продолжать работу небулайзера 2 (стадия 213). Если нет, блок управления 18 может продолжать, как показано на любой из фиг.6B, 6C и 6D, описанных выше, возвращением процесса к стадии 201, если необходимо повторно измерить импеданс.
Специалистам в данной области должно быть ясно, что возможно реализовать вариации способа, представленного на фиг.7. Например, измерения импеданса при обеих рабочих частотах (стадии 203 и 207 на фиг.7) можно осуществлять до какого-либо сравнения с соответствующими заданными значениями импеданса (стадии 205 и 211 на фиг.7).
Следовательно, предусмотрен блок управления для небулайзера и способ управления небулайзером, которые могут обнаруживать, правильно ли расположен распыляющий элемент. Кроме того, конкретные варианты осуществления изобретения предусматривают блок управления и способ, которые могут повышать эффективность небулайзера в том случае, если определяют, что распыляющий элемент не расположен правильно.
Также следует понимать, что в дополнение к блоку управления, описанному выше, изобретение можно предоставлять в форме компьютерной программы, находящейся на машиночитаемом носителе, которая выполнена с возможностью управлять процессором в блоке управления для небулайзера, чтобы исполнять стадии, показанные на фиг.6A и любой из фиг. 6B-6D.
Специалистам в данной области должно быть ясно, что слово «небулайзер» можно использовать взаимозаменяемо с термином аппарат для доставки лекарственного средства или атомизатор, и использование слова «небулайзер» предназначено для того, чтобы охватывать формы и конструкции небулайзера, отличные от небулайзера конкретного типа, описанного выше и проиллюстрированного на фигурах.
Несмотря на то что изобретение проиллюстрировано и подробно описано на чертежах и в приведенном выше описании, такие чертежи и описания следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления.
Специалисты в данной области могут понять и выполнить вариации в отношении раскрытых вариантов осуществления при практическом осуществлении описываемого в заявке изобретения из изучения чертежей, описания и приложенной формулы изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или стадии, а формы единственного числа не исключают множества. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой. Компьютерную программу можно хранить/распространять в подходящей среде, такой как оптическая запоминающая среда или твердотельная среда, поставляемая вместе с или в качестве части другого аппаратного обеспечения, а также можно распространять в других формах, например через интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

