Результат интеллектуальной деятельности: УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано для распознавания воздушно-космических объектов (ВКО) в радиолокационных станциях (РЛС).
Известны устройства, решающие аналогичную задачу [1, 2].
Недостатком аналога [1], осуществляющего распознавание воздушных объектов при двухчастотном способе обзора пространства РЛС, является невысокая вероятность правильного распознавания и небольшое количество распознаваемых классов воздушных объектов.
В аналоге [2], применяемом в РЛС с многочастотным зондирующим сигналом, вероятность правильного распознавания воздушных объектов выше, однако количество распознаваемых классов остается небольшим.
Наиболее близким по своей технической сущности и техническому исполнению является устройство [3], используемое для распознавания ВКО в «просветной» РЛС наземно-космического базирования и принятое за прототип. Это устройство содержит блок обработки радиолокационной информации, формирователь доплеровских портретов, классификатор первого уровня, классификатор второго уровня, блок эталонных доплеровских портретов, вычислитель вертикальной составляющей скорости, вычислитель трассовой скорости и параметрический классификатор. В основе работы устройства-прототипа лежит сопоставление информации о распознаваемом ВКО с априорной информацией о классах ВКО. В качестве такой информации используется огибающая доплеровского спектра сигнала, из которой формируется доплеровский портрет ВКО, высота полета ВКО, вертикальная составляющая его скорости и трассовая скорость.
Недостатком прототипа является сравнительно небольшое количество распознаваемых классов ВКО (ракета, вертолет, истребитель, транспортный самолет, баллистическая ракета, части баллистических ракеты).
Техническим результатом заявляемого изобретения является увеличение количества распознаваемых классов ВКО при достаточно высоком уровне вероятности правильного распознавания.
Поставленная цель достигается тем, что вместо распознавания по доплеровскому портрету в устройстве используется частотный признак распознавания, для чего в устройство, содержащее блок обработки радиолокационной информации (БО), вычислитель вертикальной составляющей скорости (ВСС), вычислитель трассовой скорости (ВТС), классификатор первого уровня (КПУ), классификатор второго уровня (КВУ) и параметрический классификатор (ПК), причем второй выход БО соединен через ВСС и его второй выход с первым входом ВТС, третий выход БО - со вторым входом ВТС, а выход КПУ - со входом КВУ, дополнительно введены вычислитель частотного признака распознавания (ВЧПР), вычислитель эффективной площади рассеяния (ВЭПР), блок усреднения частотного признака распознавания (БУЧПР) и блок усреднения ЭПР (БУЭПР), причем первый выход БО соединен с первым входом КПУ, второй и третий входы которого соединены, соответственно, с первым выходом ВСС и выходом ВТС, выход КВУ соединен с первым входом ПК, четвертый выход БО через последовательно соединенные ВЧПР и БУЧПР соединен со вторым входом ПК, а пятый выход БО через последовательно соединенные ВЭПР и БУЭПР - с третьим входом ПК, выход которого является выходом устройства.
На фигуре 1 представлена структурная схема предлагаемого устройства со следующими обозначениями:
1 - блок обработки радиолокационной информации (БО);
2 - вычислитель вертикальной составляющей скорости (ВСС);
3 - вычислитель трассовой скорости (ВТС);
4 - вычислитель частотного признака распознавания (ВЧПР);
5 - вычислитель ЭПР (ВЭПР);
6 - классификатор первого уровня (КПУ)
7 - классификатор второго уровня (КВУ);
8 - блок усреднения частотного признака распознавания (БУЧПР);
9 - блок усреднения ЭПР (БУЭПР);
10 - параметрический классификатор (ПК).
Предлагаемое устройство состоит из блока обработки радиолокационной информации БО 1, вычислителя вертикальной составляющей скорости ВСС 2, вычислителя трассовой скорости ВТС 3, вычислителя частотного признака распознавания ВЧПР 4 с блоком его усреднения БУЧПР 8, вычислителя ЭПР ВЭПР 5 с блоком его усреднения БУЭПР 9, классификаторов первого и второго уровней КПУ 6 и КВУ 7, соответственно, и параметрического классификатора ПК 10. Первый, второй и третий выходы БО 1 соединены, соответственно, с первым входом, через ВСС 2 - со вторым входом и через ВТС 3 - с третьим входом КПУ 6, второй выход ВСС 2 соединен с первым входом ВТС 3, а выход КПУ 6 через КВУ 7 - с первым входом ПК 10, четвертый и пятый выходы БО 1 соединены, соответственно, через последовательно соединенные ВЧПР 4 и БУЧПР 8 - со вторым входом и через последовательно соединенные ВЭПР 5 и БУЭПР 9 - с третьим входом ПК 10, выход которого является выходом устройства.
Предлагаемое устройство работает в РЛС с многочастотным зондированием цели и поимпульсной перестройкой частоты следующим образом.
При обработке сигнала, полученного с приемника РЛС, БО 1 измеряет скорость ВКО по координатам x и y (Vx, Vy) и его высоту Н на основе данных о дальности, азимуте и угле места ВКО, полученных с приемника. Также БО 1 получает с приемника и ретранслирует на вычислитель частотного признака распознавания ВЧПР 4 амплитуду сигнала на каждой рабочей частоте РЛС.
Данные о высоте ВКО с первого выхода БО 1 поступают на первый вход классификатора первого уровня КПУ 6, а со второго выхода БО 1 - на вход вычислителя ВСС 2.
Вычислитель ВСС 2 по формуле  определяет значение вертикальной составляющей скорости VHi, которое подается на второй вход КПУ 6 и на первый вход ВТС 3, на второй вход которого с третьего выхода БО 1 поступают значения горизонтальных составляющих скоростей Vx и Vy. В ВТС 3 вычисляется значение трассовой скорости ВКО по формуле
определяет значение вертикальной составляющей скорости VHi, которое подается на второй вход КПУ 6 и на первый вход ВТС 3, на второй вход которого с третьего выхода БО 1 поступают значения горизонтальных составляющих скоростей Vx и Vy. В ВТС 3 вычисляется значение трассовой скорости ВКО по формуле  , которое подается на третий вход КПУ 6, в котором осуществляется сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели. Априорная информация закладывается в КПУ 6 в виде координат точек плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота», ограничивающих области возможных значений этих признаков для каждого класса ВКО. КПУ 6 оценивает попадание точки плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота» с текущими вертикальной составляющей скорости, трассовой скоростью и высотой полета ВКО в области возможных значений соответствующих плоскостей для каждого из распознаваемых классов ВКО. Таким образом, классификатор первого уровня осуществляет предварительное распознавание класса ВКО по траекторным признакам.
, которое подается на третий вход КПУ 6, в котором осуществляется сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели. Априорная информация закладывается в КПУ 6 в виде координат точек плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота», ограничивающих области возможных значений этих признаков для каждого класса ВКО. КПУ 6 оценивает попадание точки плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота» с текущими вертикальной составляющей скорости, трассовой скоростью и высотой полета ВКО в области возможных значений соответствующих плоскостей для каждого из распознаваемых классов ВКО. Таким образом, классификатор первого уровня осуществляет предварительное распознавание класса ВКО по траекторным признакам.
Результаты, полученные в КПУ 6, поступают на классификатор второго уровня КВУ 7, где применяется корректор по большинству, использующий алгоритм обобщенного голосования [4, стр. 26]. На данном этапе принимается окончательное решение о принадлежности ВКО определенному классу, если его можно распознать по траекторным признакам, или о принадлежности ВКО группе классов, распознавание внутри которого будет осуществляться по сигнальным признакам: усредненному частотному признаку распознавания и усредненной ЭПР.
Частотный признак распознавания, который вычисляется на основе анализа поступающего с выхода 4 БО 1 отраженного сигнала при многочастотном зондировании цели, зависит от количества и взаимного расположения рассеивающих центров на поверхности цели [2, 4 стр. 15] и фактически определяет продольный размер цели.
ЭПР ВКО оценивается на основе поступающих с выхода 5 БО 1 данных о дальности и угле места цели, амплитуде цели, эхосигнале и априорной зависимости дальности цели с ЭПР 1 м2 от угла места [5].
Результаты обобщенного голосования поступают на первый вход параметрического классификатора, на второй и третий входы которого поступают данные об усредненном частотном признаке распознавания ВКО с блока БУЧПР 8 и усредненной ЭПР ВКО с блока БУЭПР 9. Здесь принимается окончательное решение о классе ВКО с учетом сигнальных признаков.
Параметры КПУ 6, КВУ 7 и ПК 10 выбираются в соответствии с априорными распределениями признаков распознавания классов ВКО, а также исходя из ошибок измерения признаков и требований к вероятности правильного распознавания классов ВКО.
Описанное устройство позволяет расширить алфавит распознаваемых классов, добавив к распознаваемым прототипом классам (ракета, вертолет, истребитель, транспортный самолет, баллистическая ракета, части баллистической ракеты) классы «ловушка», автоматический дрейфующий аэростат, гиперзвуковой летательный аппарат и боевой блок гиперзвуковой крылатой ракеты. При этом вероятности правильного распознавания классов целей будут зависеть от точностей определения частотных признаков распознавания.
Как показали натурные эксперименты и моделирование, применение описанного устройства позволяет получить вероятность правильного распознавания не ниже 0,8.
Таким образом, введение в известное устройство, содержащее блок обработки радиолокационной информации, вычислитель вертикальной составляющей скорости, вычислитель трассовой скорости, классификаторы первого и второго уровней и параметрический классификатор, дополнительно вычислителя частотного признака распознавания, вычислителя ЭПР, блоков усреднения частотного признака распознавания и ЭПР, с соответствующими связями, позволило достичь заявленного технического результата: увеличить количество распознаваемых классов ВКО при достаточно высоком уровне вероятности правильного распознавания.
Источники информации
1. Патент РФ №2407033 «Устройство распознавания воздушных целей двухчастотным способом», 20.12.2010 (аналог).
2. Патент РФ №2083993 «Радиолокационное устройство распознавания воздушных целей», 10.07.1997 (аналог).
3. Патент РФ №2324201 «Устройство радиолокационного распознавания воздушных объектов», 27.12.2007 (прототип).
4. Ширман А.Д. и др. «Методы радиолокационного распознавания и их моделирование». Зарубежная радиоэлектроника, 1996, №11.
5. Сколник М. Справочник по радиолокации, том 1. Москва, «Советское радио», 1976, стр. 356-395.
Устройство радиолокационного распознавания воздушно-космических объектов, содержащее блок обработки радиолокационной информации (БО), вычислитель вертикальной составляющей скорости (ВСС), вычислитель трассовой скорости (ВТС), классификатор первого уровня (КПУ), классификатор второго уровня (КВУ) и параметрический классификатор (ПК), причем второй выход БО соединен с ВСС, второй выход которого соединен с первым входом ВТС, третий выход БО соединен со вторым входом ВТС, а выход КПУ - со входом КВУ, отличающееся тем, что в него дополнительно введены вычислитель частотного признака распознавания (ВЧПР), вычислитель эффективной площади рассеяния (ВЭПР), блок усреднения частотного признака распознавания (БУЧПР) и блок усреднения эффективной поверхности рассеяния (БУЭПР), причем первый выход БО соединен с первым входом КПУ, второй и третий входы которого соединены, соответственно, с первым выходом ВСС и выходом ВТС, выход КВУ соединен с первым входом ПК, четвертый выход БО через последовательно соединенные ВЧПР и БУЧПР соединен со вторым входом ПК, а пятый выход БО через последовательно соединенные ВЭПР и БУЭПР - с третьим входом ПК, выход которого является выходом устройства.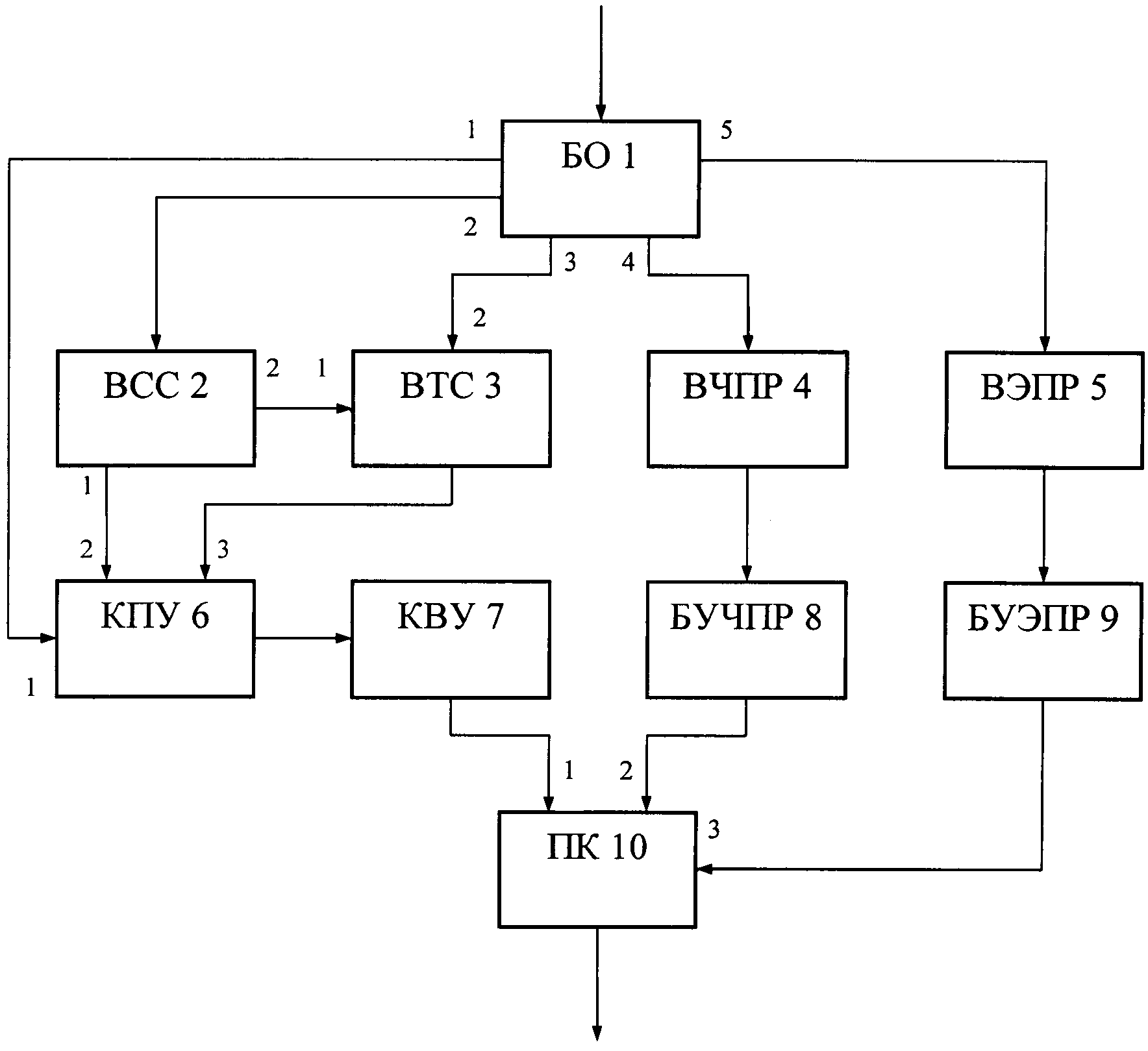
Многоканальный цифровой приемный модуль с оптическими каналами обмена информацией, управления и хронизации
Способ и устройство обнаружения линейчатых структур
Способ обнаружения маневра баллистического объекта по выборкам произведений дальности на радиальную скорость и устройство для его реализации
Ротор кустореза
Способ и машина для тушения лесного наземного пожара

