Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ФОРМЫ И ПОЛОЖЕНИЯ ПРОФИЛЯ РАБОЧИХ ЛОПАТОК МОНОКОЛЕСА
Вид РИД
Изобретение
Изобретение относится к способам измерения, а именно к способам измерения профилей сечений, и может быть использовано для контроля профиля и положения рабочих лопаток моноколеса.
Проведенный патентный поиск аналогов заявленного способа контроля формы и положения профиля рабочих лопаток моноколеса показал следующее.
Известен способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым лопатку и шаблон неподвижно фиксируют в базовом приспособлении, форму профиля лопатки в заданном сечении контролируют с помощью шаблонов, а положение контролируют в тангенциальном направлении относительно теоретической оси лопатки с помощью глубиномера. Контроль выполняют не менее чем в трех сечениях (Н.Я. Бауман и др. Технология производства паровых и газовых турбин. - М.: Машиностроение, 1973, с. 128-129).
Известен также способ контроля формы и положения профиля рабочих лопаток турбины, в соответствии с которым лопатку закрепляют неподвижно, для чего ее укладывают на стол, представляющий собой профильную подушку, а хвостовик жестко фиксируют. Контроль формы и положения профиля лопатки выполняют не менее чем в трех сечениях относительно теоретической оси лопатки с помощью шаблонов, которые накладывают на поверхность лопатки. О соответствии профиля лопатки эталонному судят по величине зазора между рабочей поверхностью шаблона и контролируемой поверхностью лопатки в тангенциальном направлении (М.Н. Бушуев. Технология производства турбин. - М.: Машиностроение, 1966, с. 68-69).
Известен также способ балансировки лопаточного колеса машины и устройство для определения геометрических параметров лопаток лопаточного колеса машины, в соответствие с которым лопаточное колесо устанавливают горизонтально, выбирают контрольную лопатку и измеряют величину угла хорды ее пера относительно горизонта посредством узла измерения отклонения геометрического параметра лопаток лопаточного колеса в заданном сечении. Переставляя узел измерения в то же выбранное сечение последующих лопаток, измеряют разницу угла установки лопаток относительно контрольной, сравнивают результаты измерений, а затем производят подбор попарных лопаток с заданным допуском на алгебраическую сумму их разностей углов хорды (патент РФ №2082072, МПК G01B 5/20, 20.06.1997).
Наиболее близким к предлагаемому является способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, исходя из базового положения шаблона по чертежу, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют в тангенциальном направлении относительно теоретической оси лопатки. При этом лопатки и шаблоны закрепляют неподвижно. Контроль формы и положения профиля лопатки выполняют не менее чем в трех сечениях относительно теоретической оси лопатки с помощью шаблонов, которые накладывают на поверхность пера лопатки. О соответствии профиля пера лопатки эталонному судят по величине зазора между рабочей поверхностью шаблона и контролируемой поверхностью лопатки в тангенциальном направлении (патент РФ №2248522, МПК G01B 5/20, 20.03.2005).
Недостаток выявленных способов контроля формы и положения рабочих лопаток моноколеса заключается в следующем. Поскольку в способах шаблон закрепляют неподвижно, это позволяет контролировать форму и положение лопатки относительно теоретической оси лопатки только в одном направлении - в тангенциальном, что снижает достоверность и информативность результатов контроля и не позволяет сократить количество отбраковываемых изделий. Неподвижное закрепление шаблона сужает функциональные возможности выявленных способов. Это объясняется, во-первых, тем, что неподвижное закрепление шаблона не позволяет контролировать форму лопатки в случае, если лопатка в данном сечении развернута. В результате это приводит к необоснованной отбраковке лопатки, так как зачастую в этом случае форма лопатки соответствует норме. Во-вторых, неподвижное закрепление шаблона обуславливает отсутствие возможности контроля формы и положения лопатки в направлении, перпендикулярном тангенциальному (в аксиальном направлении), т.е. отсутствует вторая координата, что не позволяет с помощью выявленных способов определить в контролируемом сечении положение истинной оси лопатки относительно теоретической.
Задачей изобретения является расширение функциональных возможностей способа за счет возможности контроля лопаток моноколеса, а также уменьшение количества отбракованных изделий за счет повышения достоверности результата контроля.
Техническим результатом, вытекающим из поставленной задачи, является повышение достоверности результата контроля моноколеса.
Сущность изобретения заключается в том, что в способе контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение лопатки в заданном сечении контролируют в тангенциальном направлении путем определения положения ее профиля относительно теоретической оси лопатки, согласно изобретению дополнительно в заданном сечении контролируют положение профиля лопатки в аксиальном направлении и наличие отклонения реальной оси лопатки от теоретической, для чего лопатки фиксируют в заданном положении и моноколесо закрепляют неподвижно, после перемещают на шаг расположения с возможностью поворота шаблона вокруг теоретической оси, затем в заданном сечении прикладывают рабочую поверхность шаблона к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном, в аксиальном направлении, угол и направление поворота лопатки, затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток.
Технический результат достигается следующим образом. Использование шаблонов для контроля формы профиля лопатки путем совмещения рабочей поверхности шаблона с поверхностью лопатки позволяет выявить в контролируемом сечении наличие отклонения истинной формы профиля лопатки от теоретической. Последовательное выполнение контроля формы и положения профиля лопатки в заданных сечениях позволяет контролировать любое сечение лопатки, а также получить общее представление о соответствии изготовленной лопатки требуемым нормам, что позволяет исключить брак изделий.
Благодаря тому что при контроле шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, обеспечивается возможность контроля формы и положения профиля лопатки в тангенциальном и в аксиальном направлениях относительно теоретической оси лопатки, что повышает достоверность и информативность заявленного способа. Возможностью поворота шаблона позволяет, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, получить наиболее полное совмещение поверхности профиля лопатки с рабочей поверхностью шаблона. В результате возможность поворота шаблона вокруг теоретической оси позволяет получить информацию о форме профиля и положении лопатки в заданном сечении относительно теоретической оси лопатки, т.е. получить информацию, максимально приближенную к реальной, максимально снизить ошибку результатов контроля и тем самым исключить брак изделий.
Кроме того, возможность поворота шаблона автоматически позволяет проконтролировать форму профиля лопатки в случае, если она развернута, что расширяет функциональные возможности способа. В результате повышается информативность и достоверность способа, что уменьшает количество забракованных изделий.
Закрепление шаблона с возможностью поворота позволяет контролировать наличие отклонения реальной оси лопатки от теоретической, для чего фиксируют угол и направление поворота шаблона относительно лопатки, что расширяет функциональные возможности заявленного способа. Кроме того, фиксируемые величины смещения шаблонов от исходного состояния в тангенциальном и аксиальном направлениях можно рассматривать как пространственные координаты, определяющие истинное положение реальной оси лопатки относительно теоретической, что в совокупности с вышеизложенным позволяет не только зафиксировать наличие отклонения реальной оси лопатки от теоретической, но и определить пространственное положение реальной оси лопатки в контролируемом сечении. В результате повышается информативность способа, достоверность, что позволяет исключить брак изделий.
Благодаря тому, что фиксируют величину смещения шаблона относительно теоретической оси лопатки в тангенциальном и в аксиальном направлениях, а также фиксируют направление и угол поворота лопатки, обеспечивается возможность количественной оценки результатов контроля. Наличие количественных результатов, характеризующих истинную форму и положение лопатки, позволяет сравнить их с расчетными параметрами и сделать выводы в отношении пригодности моноколеса к эксплуатации, что повышает информативность и достоверность способа и позволяет исключить брак изделий.
Кроме того, возможность получения по сравнению с прототипом более полной информации о форме профиля и положении лопатки в моноколесе, позволяет уменьшить количество забракованных изделий.
Из вышеизложенного следует, что заявленный способ контроля формы и положения профиля рабочих лопаток моноколеса (блисков) позволяет получить по сравнению с прототипом наиболее полную информацию о форме и положении профиля лопатки в контролируемом сечении с учетом положения реальной оси лопатки относительно теоретической. Это обеспечивается благодаря тому, что с возможностью поворота шаблона вокруг теоретической оси лопатки, что обеспечивает возможность наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона и возможность контроля наличия отклонения реальной оси лопатки от теоретической, для чего фиксируют угол и направление поворота шаблона относительно теоретической оси лопатки, а также фиксируют величины смещения шаблона от исходного положения в тангенциальном и в аксиальном направлениях, затем моноколесо пошагово поворачивают и контролируют положение профиля остальных лопаток.
Таким образом, заявленный способ контроля формы и положения профиля рабочих лопаток моноколеса (блисков) при осуществлении обеспечивает достижение технического результата, заключающегося в повышении достоверности и информативности результатов контроля, в расширении функциональных возможностей, в возможности исключения брака изделий.
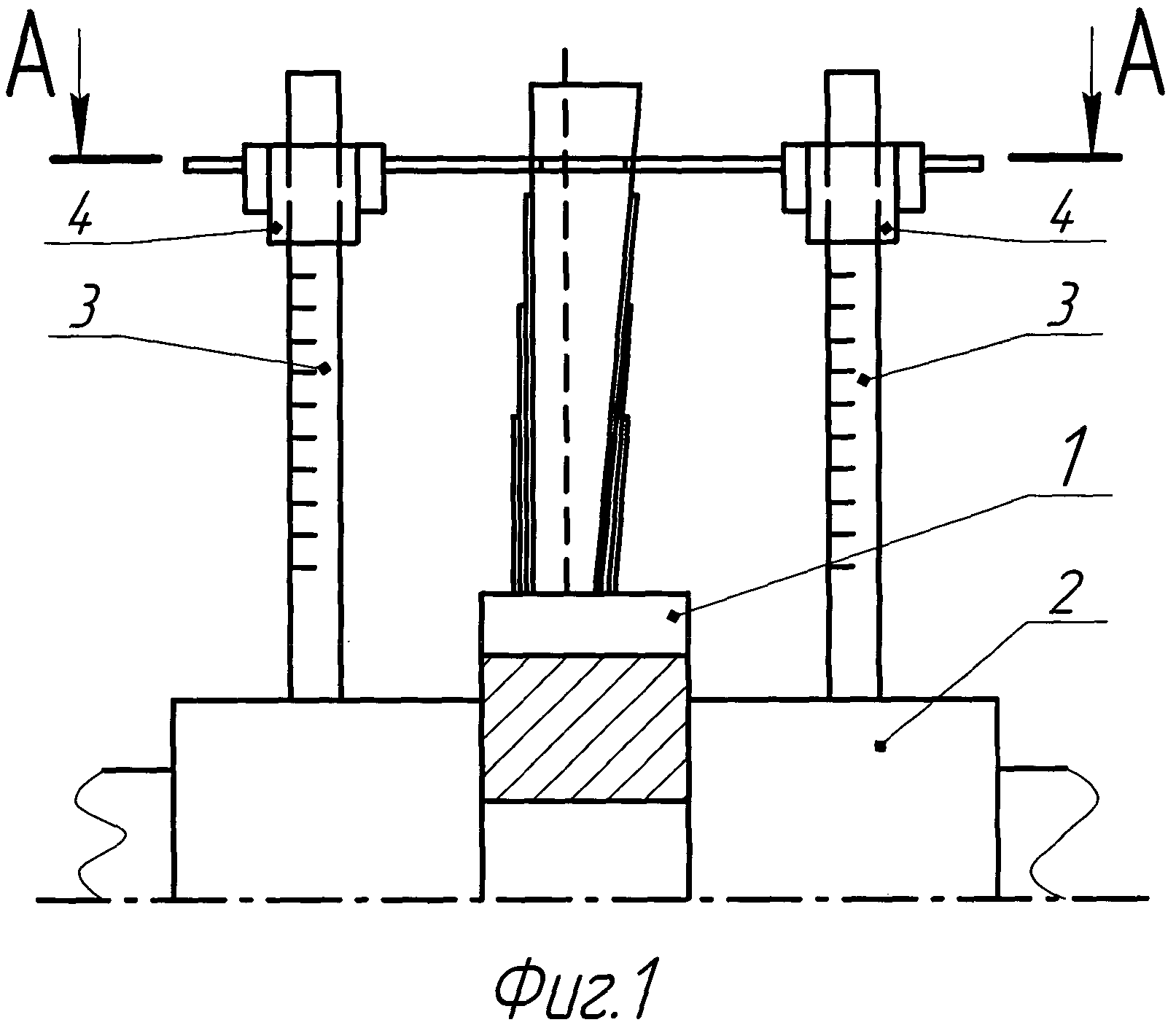
На фиг. 1 изображено устройство для контроля формы и положения рабочих лопаток моноколеса, реализующее заявленный способ; на фиг. 2 - устройство для контроля формы и положения рабочих лопаток моноколеса - вид сверху (сечение).
Для реализации предлагаемого способа может быть использовано следующее устройство, содержащее моноколесо 1, фиксатор для закрепления лопатки, выполненный с пазом 2, вертикальную стойку 3, каретку 4, шаблоны 5 для контроля формы профиля рабочей лопатки моноколеса. Рабочая поверхность шаблонов 5 имеет форму, конгруэнтную форме теоретического профиля лопатки в контролируемом сечении. Фиксатор для закрепления лопатки имеет паз 2, который может, например, совпадать по форме и геометрическим размерам с центральным отверстием на диске моноколеса. Фиксатор снабжен нониусом со шкалой для фиксации угла поворота. Вертикальная стойка 3 перпендикулярна фиксатору и соединена с ним с возможностью поворота относительно пера лопатки моноколеса. На вертикальной стойке 3 под прямым углом установлен с возможностью перемещения в тангенциальном и аксиальном направлениях шаблон 5. На вертикальной стойке 3 выполнены отметки для установки шаблона 5 в контролируемое сечение лопатки. Шаблоны 5 - сменные. Для этого на вертикальной стойке 3 установлена каретка 4 с пазом 6 для шаблона 5. Шаблон 5 размещен в пазу 6 каретки 4 с возможностью перемещения в тангенциальном направлении, а каретка 4 закреплена на горизонтальной рейке 7 с возможностью перемещения в аксиальном направлении. Для количественной оценки величины отклонения положения шаблонов от исходного при их перемещении в тангенциальном и аксиальном направлениях устройство содержит нониусы 8, 9, которые выполнены на поверхностях шаблона 5 и горизонтальной рейки 7 соответственно. При этом одна из встречных кромок 10 паза 6 каретки 4 снабжена указателем 11 перемещения шаблона в тангенциальном направлении. Выполнение паза 2 совпадающим по форме и геометрическим размерам с центральным отверстием моноколеса обеспечивает возможность надежного закрепления моноколеса в фиксаторе. Использование вертикальной стойки 3, перпендикулярной фиксатору, и расположение контролируемых лопаток в вертикальном положении, а также положение оси вертикальной стойки 3 параллельно теоретической оси лопатки позволяют зафиксировать в пространстве теоретическую ось лопатки и обеспечивают возможность перемещения шаблонов в плоскости, перпендикулярной теоретической оси лопатки.
Способ контроля формы и положения профиля рабочих лопаток моноколеса выполняют следующим образом. Контроль формы и положения профиля лопатки выполняют последовательно в заданных сечениях при помощи шаблонов. Для контроля формы профиля лопатки рабочую поверхность шаблона совмещают в заданном сечении с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют относительно теоретической оси лопатки в тангенциальном и аксиальном направлениях и, кроме того, контролируют наличие отклонения реальной оси лопатки от теоретической. Для этого в заданном сечении прикладывают шаблон к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности шаблона с рабочей поверхностью лопатки, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном и аксиальном направлениях, угол и направление поворота шаблона.
Пример конкретной реализации способа
Способ контроля формы и положения профиля рабочих лопаток моноколеса реализуют с помощью устройства для контроля формы и положения профиля рабочих лопаток, которое работает следующим образом. Лопатку моноколеса высотой 300 мм устанавливают вертикально, для чего моноколесо диаметром 145 мм поворачивают относительно его продольной оси в пазу 2 и закрепляют в рабочем положении. В паз 6 каретки 4 вставляют шаблон 5. Каретку 4 с шаблоном 5, перемещая вверх или вниз по горизонтальной рейке 7 до соответствующей отметки, устанавливают в контролируемое сечение пера лопатки. Фиксируют по нониусам 8 и 9 исходное положение шаблона 5 в тангенциальном и аксиальном направлениях соответственно. В исходном положении нониус фиксатора установлен в нуль. Совмещают шаблон 5 с контролируемой поверхностью лопатки, перемещая шаблон в тангенциальном и аксиальном направлениях и одновременно поворачивая шаблон до наилучшего совмещения рабочей поверхности шаблона 5 с контролируемой поверхностью пера лопатки. При этом фиксируют направление поворота и угол поворота фиксатора по нониусу. По направлению поворота шаблона относительно пера лопатки и величине угла поворота шаблона определяют направление и наличие отклонения реальной оси лопатки от ее теоретической оси. После окончательного совмещения шаблона 5 с поверхностью лопатки по нониусам 8, 9 фиксируют результирующее положение шаблона 5 в тангенциальном и аксиальном направлениях соответственно. Вычисляют величины отклонений формы профиля лопатки от исходного положения в тангенциальном и аксиальном направлениях. Затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток (моноколесо содержит 23 лопатки).
Итак, заявляемое изобретение способствует расширению функциональных возможностей способа за счет возможности контроля лопаток моноколеса, а также уменьшение количества отбракованных изделий за счет повышения достоверности результата контроля.
Способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют в тангенциальном направлении относительно теоретической оси лопатки, отличающийся тем, что дополнительно в заданном сечении контролируют положение профиля лопатки в аксиальном направлении и наличие отклонения реальной оси лопатки от теоретической, для чего лопатки фиксируют в заданном положении и моноколесо закрепляют неподвижно, после перемещают на шаг расположения с возможностью поворота вокруг теоретической оси, затем в заданном сечении прикладывают рабочую поверхность шаблона к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном и аксиальном направлениях, угол и направление поворота лопатки, затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток.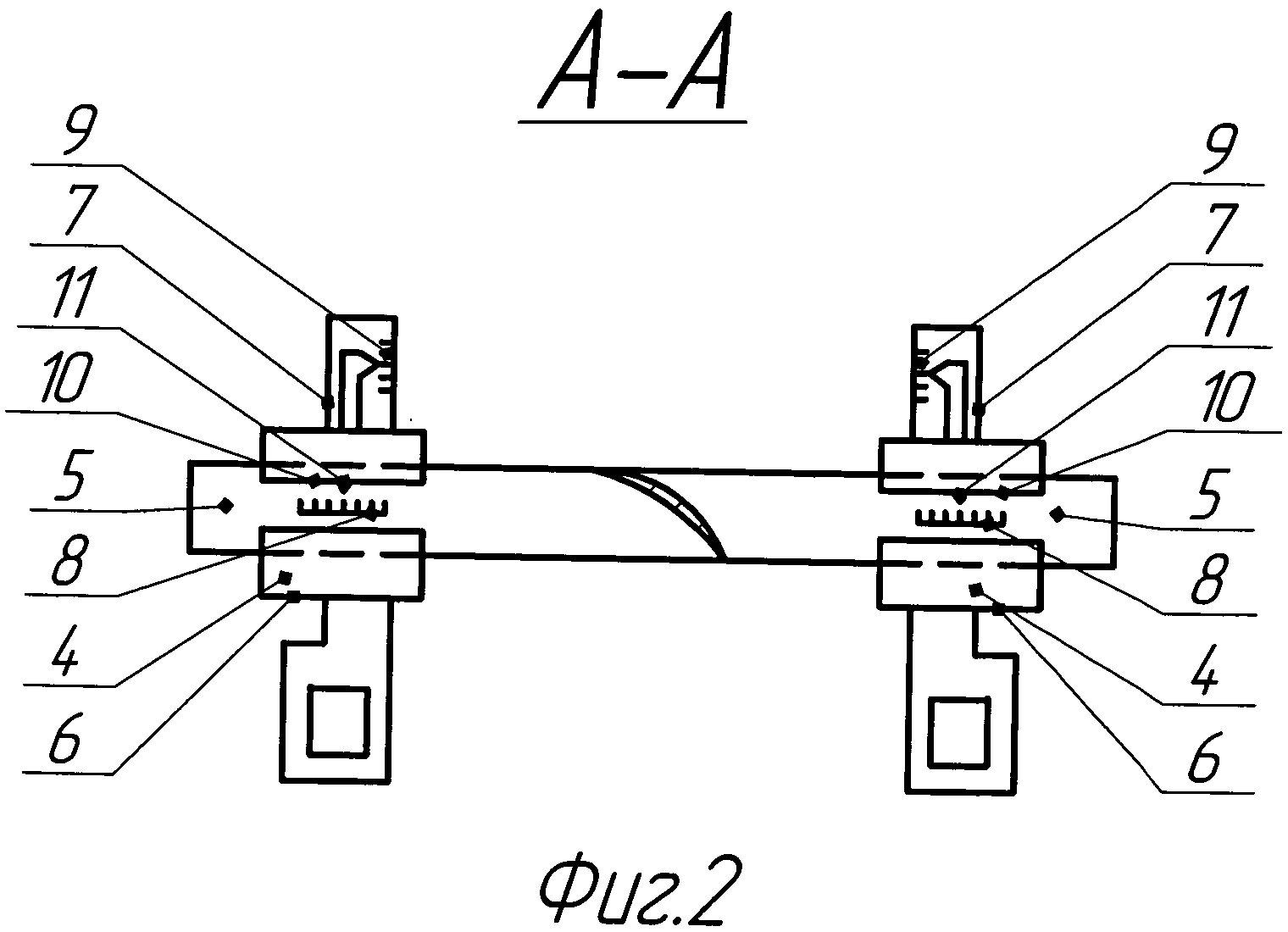
Способ получения отверстий сложной формы в крупногабаритных отливках
Способ логического управления сложным многосвязным динамическим объектом
Ротор электромеханического преобразователя энергии с постоянными магнитами (варианты)
Способ контроля систем зажигания газотурбинных двигателей
Датчик скорости изменения ускорения
Устройство для обжима инструмента
Струйно-кавитационный делитель потока жидкости
Система защиты магнитоэлектрического генератора от короткого замыкания и способ управления системой
Профилемер с использованием оптических волокон
Электростатический сепаратор
Профилемер с использованием оптических волокон
Электростатический сепаратор
Интегрированный высокотемпературный стартер-генератор и способ управления им
Акселерометр-тахогенератор
Способ защиты от эрозии и солевой коррозии лопаток турбомашин из легированных сталей
Способ защиты лопаток турбомашин из легированных сталей от эрозии и солевой коррозии
Способ определения температуры в зоне резания металла
Способ диагностики helicobacter pylori и устройство для его реализации
Способ формирования траектории полета информационного летательного аппарата и устройство для его осуществления
Способ электроэрозионной обработки отверстий малого диаметра

