Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ФОРМЫ И ПОЛОЖЕНИЯ ПРОФИЛЯ РАБОЧИХ ЛОПАТОК МОНОКОЛЕСА
Вид РИД
Изобретение
Изобретение относится к способам измерения, а именно к способам измерения профилей сечений, и может быть использовано для контроля профиля и положения рабочих лопаток моноколеса.
Проведенный патентный поиск аналогов заявленного способа контроля формы и положения профиля рабочих лопаток моноколеса показал следующее.
Известен способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым лопатку и шаблон неподвижно фиксируют в базовом приспособлении, форму профиля лопатки в заданном сечении контролируют с помощью шаблонов, а положение контролируют в тангенциальном направлении относительно теоретической оси лопатки с помощью глубиномера. Контроль выполняют не менее чем в трех сечениях (Н.Я. Бауман и др. Технология производства паровых и газовых турбин. - М.: Машиностроение, 1973, с. 128-129).
Известен также способ контроля формы и положения профиля рабочих лопаток турбины, в соответствии с которым лопатку закрепляют неподвижно, для чего ее укладывают на стол, представляющий собой профильную подушку, а хвостовик жестко фиксируют. Контроль формы и положения профиля лопатки выполняют не менее чем в трех сечениях относительно теоретической оси лопатки с помощью шаблонов, которые накладывают на поверхность лопатки. О соответствии профиля лопатки эталонному судят по величине зазора между рабочей поверхностью шаблона и контролируемой поверхностью лопатки в тангенциальном направлении (М.Н. Бушуев. Технология производства турбин. - М.: Машиностроение, 1966, с. 68-69).
Известен также способ балансировки лопаточного колеса машины и устройство для определения геометрических параметров лопаток лопаточного колеса машины, в соответствие с которым лопаточное колесо устанавливают горизонтально, выбирают контрольную лопатку и измеряют величину угла хорды ее пера относительно горизонта посредством узла измерения отклонения геометрического параметра лопаток лопаточного колеса в заданном сечении. Переставляя узел измерения в то же выбранное сечение последующих лопаток, измеряют разницу угла установки лопаток относительно контрольной, сравнивают результаты измерений, а затем производят подбор попарных лопаток с заданным допуском на алгебраическую сумму их разностей углов хорды (патент РФ №2082072, МПК G01B 5/20, 20.06.1997).
Наиболее близким к предлагаемому является способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, исходя из базового положения шаблона по чертежу, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют в тангенциальном направлении относительно теоретической оси лопатки. При этом лопатки и шаблоны закрепляют неподвижно. Контроль формы и положения профиля лопатки выполняют не менее чем в трех сечениях относительно теоретической оси лопатки с помощью шаблонов, которые накладывают на поверхность пера лопатки. О соответствии профиля пера лопатки эталонному судят по величине зазора между рабочей поверхностью шаблона и контролируемой поверхностью лопатки в тангенциальном направлении (патент РФ №2248522, МПК G01B 5/20, 20.03.2005).
Недостаток выявленных способов контроля формы и положения рабочих лопаток моноколеса заключается в следующем. Поскольку в способах шаблон закрепляют неподвижно, это позволяет контролировать форму и положение лопатки относительно теоретической оси лопатки только в одном направлении - в тангенциальном, что снижает достоверность и информативность результатов контроля и не позволяет сократить количество отбраковываемых изделий. Неподвижное закрепление шаблона сужает функциональные возможности выявленных способов. Это объясняется, во-первых, тем, что неподвижное закрепление шаблона не позволяет контролировать форму лопатки в случае, если лопатка в данном сечении развернута. В результате это приводит к необоснованной отбраковке лопатки, так как зачастую в этом случае форма лопатки соответствует норме. Во-вторых, неподвижное закрепление шаблона обуславливает отсутствие возможности контроля формы и положения лопатки в направлении, перпендикулярном тангенциальному (в аксиальном направлении), т.е. отсутствует вторая координата, что не позволяет с помощью выявленных способов определить в контролируемом сечении положение истинной оси лопатки относительно теоретической.
Задачей изобретения является расширение функциональных возможностей способа за счет возможности контроля лопаток моноколеса, а также уменьшение количества отбракованных изделий за счет повышения достоверности результата контроля.
Техническим результатом, вытекающим из поставленной задачи, является повышение достоверности результата контроля моноколеса.
Сущность изобретения заключается в том, что в способе контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение лопатки в заданном сечении контролируют в тангенциальном направлении путем определения положения ее профиля относительно теоретической оси лопатки, согласно изобретению дополнительно в заданном сечении контролируют положение профиля лопатки в аксиальном направлении и наличие отклонения реальной оси лопатки от теоретической, для чего лопатки фиксируют в заданном положении и моноколесо закрепляют неподвижно, после перемещают на шаг расположения с возможностью поворота шаблона вокруг теоретической оси, затем в заданном сечении прикладывают рабочую поверхность шаблона к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном, в аксиальном направлении, угол и направление поворота лопатки, затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток.
Технический результат достигается следующим образом. Использование шаблонов для контроля формы профиля лопатки путем совмещения рабочей поверхности шаблона с поверхностью лопатки позволяет выявить в контролируемом сечении наличие отклонения истинной формы профиля лопатки от теоретической. Последовательное выполнение контроля формы и положения профиля лопатки в заданных сечениях позволяет контролировать любое сечение лопатки, а также получить общее представление о соответствии изготовленной лопатки требуемым нормам, что позволяет исключить брак изделий.
Благодаря тому что при контроле шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, обеспечивается возможность контроля формы и положения профиля лопатки в тангенциальном и в аксиальном направлениях относительно теоретической оси лопатки, что повышает достоверность и информативность заявленного способа. Возможностью поворота шаблона позволяет, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, получить наиболее полное совмещение поверхности профиля лопатки с рабочей поверхностью шаблона. В результате возможность поворота шаблона вокруг теоретической оси позволяет получить информацию о форме профиля и положении лопатки в заданном сечении относительно теоретической оси лопатки, т.е. получить информацию, максимально приближенную к реальной, максимально снизить ошибку результатов контроля и тем самым исключить брак изделий.
Кроме того, возможность поворота шаблона автоматически позволяет проконтролировать форму профиля лопатки в случае, если она развернута, что расширяет функциональные возможности способа. В результате повышается информативность и достоверность способа, что уменьшает количество забракованных изделий.
Закрепление шаблона с возможностью поворота позволяет контролировать наличие отклонения реальной оси лопатки от теоретической, для чего фиксируют угол и направление поворота шаблона относительно лопатки, что расширяет функциональные возможности заявленного способа. Кроме того, фиксируемые величины смещения шаблонов от исходного состояния в тангенциальном и аксиальном направлениях можно рассматривать как пространственные координаты, определяющие истинное положение реальной оси лопатки относительно теоретической, что в совокупности с вышеизложенным позволяет не только зафиксировать наличие отклонения реальной оси лопатки от теоретической, но и определить пространственное положение реальной оси лопатки в контролируемом сечении. В результате повышается информативность способа, достоверность, что позволяет исключить брак изделий.
Благодаря тому, что фиксируют величину смещения шаблона относительно теоретической оси лопатки в тангенциальном и в аксиальном направлениях, а также фиксируют направление и угол поворота лопатки, обеспечивается возможность количественной оценки результатов контроля. Наличие количественных результатов, характеризующих истинную форму и положение лопатки, позволяет сравнить их с расчетными параметрами и сделать выводы в отношении пригодности моноколеса к эксплуатации, что повышает информативность и достоверность способа и позволяет исключить брак изделий.
Кроме того, возможность получения по сравнению с прототипом более полной информации о форме профиля и положении лопатки в моноколесе, позволяет уменьшить количество забракованных изделий.
Из вышеизложенного следует, что заявленный способ контроля формы и положения профиля рабочих лопаток моноколеса (блисков) позволяет получить по сравнению с прототипом наиболее полную информацию о форме и положении профиля лопатки в контролируемом сечении с учетом положения реальной оси лопатки относительно теоретической. Это обеспечивается благодаря тому, что с возможностью поворота шаблона вокруг теоретической оси лопатки, что обеспечивает возможность наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона и возможность контроля наличия отклонения реальной оси лопатки от теоретической, для чего фиксируют угол и направление поворота шаблона относительно теоретической оси лопатки, а также фиксируют величины смещения шаблона от исходного положения в тангенциальном и в аксиальном направлениях, затем моноколесо пошагово поворачивают и контролируют положение профиля остальных лопаток.
Таким образом, заявленный способ контроля формы и положения профиля рабочих лопаток моноколеса (блисков) при осуществлении обеспечивает достижение технического результата, заключающегося в повышении достоверности и информативности результатов контроля, в расширении функциональных возможностей, в возможности исключения брака изделий.
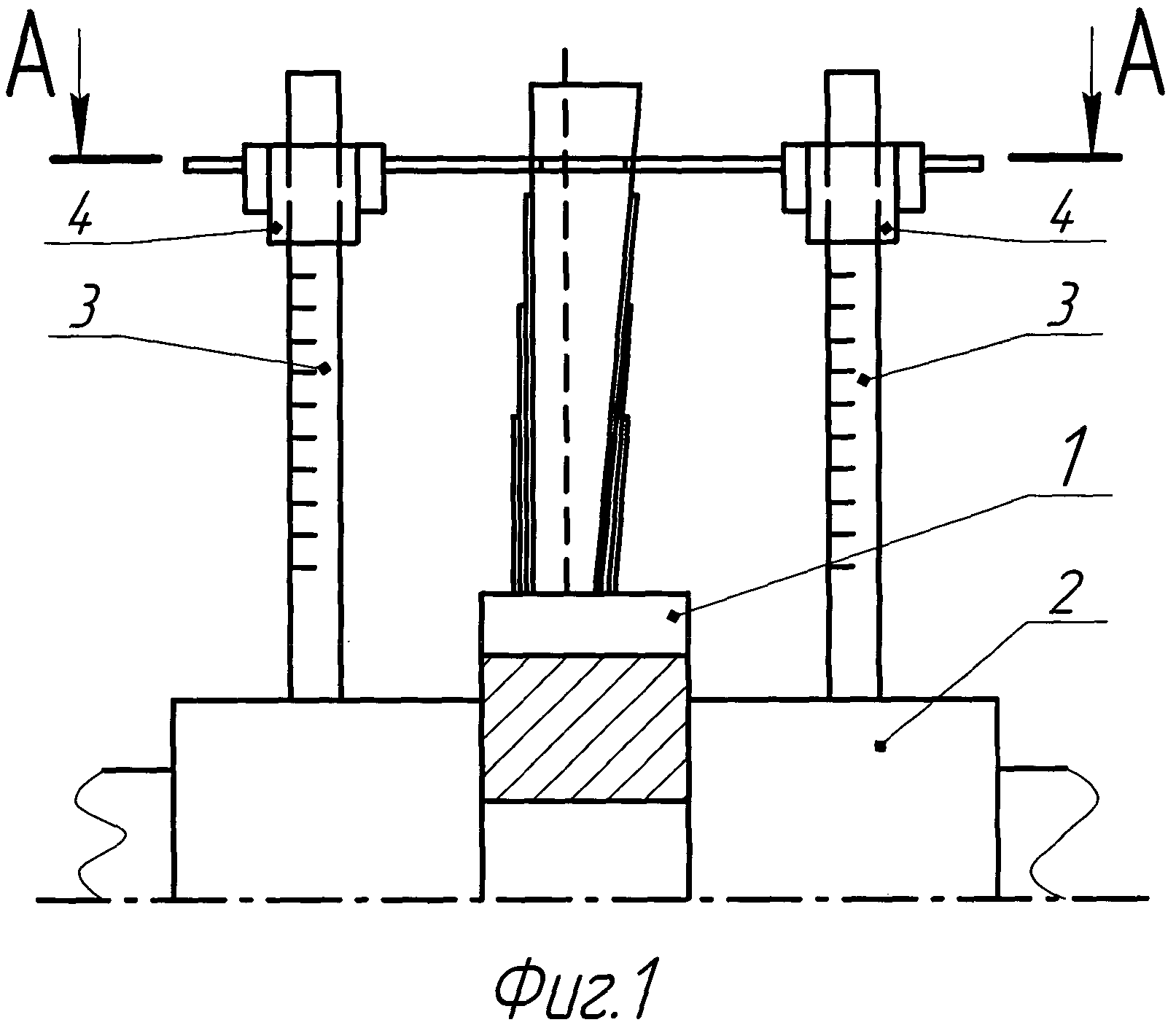
На фиг. 1 изображено устройство для контроля формы и положения рабочих лопаток моноколеса, реализующее заявленный способ; на фиг. 2 - устройство для контроля формы и положения рабочих лопаток моноколеса - вид сверху (сечение).
Для реализации предлагаемого способа может быть использовано следующее устройство, содержащее моноколесо 1, фиксатор для закрепления лопатки, выполненный с пазом 2, вертикальную стойку 3, каретку 4, шаблоны 5 для контроля формы профиля рабочей лопатки моноколеса. Рабочая поверхность шаблонов 5 имеет форму, конгруэнтную форме теоретического профиля лопатки в контролируемом сечении. Фиксатор для закрепления лопатки имеет паз 2, который может, например, совпадать по форме и геометрическим размерам с центральным отверстием на диске моноколеса. Фиксатор снабжен нониусом со шкалой для фиксации угла поворота. Вертикальная стойка 3 перпендикулярна фиксатору и соединена с ним с возможностью поворота относительно пера лопатки моноколеса. На вертикальной стойке 3 под прямым углом установлен с возможностью перемещения в тангенциальном и аксиальном направлениях шаблон 5. На вертикальной стойке 3 выполнены отметки для установки шаблона 5 в контролируемое сечение лопатки. Шаблоны 5 - сменные. Для этого на вертикальной стойке 3 установлена каретка 4 с пазом 6 для шаблона 5. Шаблон 5 размещен в пазу 6 каретки 4 с возможностью перемещения в тангенциальном направлении, а каретка 4 закреплена на горизонтальной рейке 7 с возможностью перемещения в аксиальном направлении. Для количественной оценки величины отклонения положения шаблонов от исходного при их перемещении в тангенциальном и аксиальном направлениях устройство содержит нониусы 8, 9, которые выполнены на поверхностях шаблона 5 и горизонтальной рейки 7 соответственно. При этом одна из встречных кромок 10 паза 6 каретки 4 снабжена указателем 11 перемещения шаблона в тангенциальном направлении. Выполнение паза 2 совпадающим по форме и геометрическим размерам с центральным отверстием моноколеса обеспечивает возможность надежного закрепления моноколеса в фиксаторе. Использование вертикальной стойки 3, перпендикулярной фиксатору, и расположение контролируемых лопаток в вертикальном положении, а также положение оси вертикальной стойки 3 параллельно теоретической оси лопатки позволяют зафиксировать в пространстве теоретическую ось лопатки и обеспечивают возможность перемещения шаблонов в плоскости, перпендикулярной теоретической оси лопатки.
Способ контроля формы и положения профиля рабочих лопаток моноколеса выполняют следующим образом. Контроль формы и положения профиля лопатки выполняют последовательно в заданных сечениях при помощи шаблонов. Для контроля формы профиля лопатки рабочую поверхность шаблона совмещают в заданном сечении с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют относительно теоретической оси лопатки в тангенциальном и аксиальном направлениях и, кроме того, контролируют наличие отклонения реальной оси лопатки от теоретической. Для этого в заданном сечении прикладывают шаблон к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности шаблона с рабочей поверхностью лопатки, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном и аксиальном направлениях, угол и направление поворота шаблона.
Пример конкретной реализации способа
Способ контроля формы и положения профиля рабочих лопаток моноколеса реализуют с помощью устройства для контроля формы и положения профиля рабочих лопаток, которое работает следующим образом. Лопатку моноколеса высотой 300 мм устанавливают вертикально, для чего моноколесо диаметром 145 мм поворачивают относительно его продольной оси в пазу 2 и закрепляют в рабочем положении. В паз 6 каретки 4 вставляют шаблон 5. Каретку 4 с шаблоном 5, перемещая вверх или вниз по горизонтальной рейке 7 до соответствующей отметки, устанавливают в контролируемое сечение пера лопатки. Фиксируют по нониусам 8 и 9 исходное положение шаблона 5 в тангенциальном и аксиальном направлениях соответственно. В исходном положении нониус фиксатора установлен в нуль. Совмещают шаблон 5 с контролируемой поверхностью лопатки, перемещая шаблон в тангенциальном и аксиальном направлениях и одновременно поворачивая шаблон до наилучшего совмещения рабочей поверхности шаблона 5 с контролируемой поверхностью пера лопатки. При этом фиксируют направление поворота и угол поворота фиксатора по нониусу. По направлению поворота шаблона относительно пера лопатки и величине угла поворота шаблона определяют направление и наличие отклонения реальной оси лопатки от ее теоретической оси. После окончательного совмещения шаблона 5 с поверхностью лопатки по нониусам 8, 9 фиксируют результирующее положение шаблона 5 в тангенциальном и аксиальном направлениях соответственно. Вычисляют величины отклонений формы профиля лопатки от исходного положения в тангенциальном и аксиальном направлениях. Затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток (моноколесо содержит 23 лопатки).
Итак, заявляемое изобретение способствует расширению функциональных возможностей способа за счет возможности контроля лопаток моноколеса, а также уменьшение количества отбракованных изделий за счет повышения достоверности результата контроля.
Способ контроля формы и положения профиля рабочих лопаток моноколеса, в соответствии с которым последовательно контролируют форму профиля лопатки в заданных сечениях при помощи шаблонов путем совмещения в заданном сечении рабочей поверхности шаблона с лопаткой, при этом шаблон перемещают в плоскости, перпендикулярной теоретической оси лопатки, а положение профиля лопатки в заданном сечении контролируют в тангенциальном направлении относительно теоретической оси лопатки, отличающийся тем, что дополнительно в заданном сечении контролируют положение профиля лопатки в аксиальном направлении и наличие отклонения реальной оси лопатки от теоретической, для чего лопатки фиксируют в заданном положении и моноколесо закрепляют неподвижно, после перемещают на шаг расположения с возможностью поворота вокруг теоретической оси, затем в заданном сечении прикладывают рабочую поверхность шаблона к поверхности лопатки и, перемещая шаблон в тангенциальном и аксиальном направлениях и поворачивая шаблон, добиваются наиболее полного совмещения поверхности лопатки с рабочей поверхностью шаблона, при этом фиксируют величину смещения шаблона от исходного положения в тангенциальном и аксиальном направлениях, угол и направление поворота лопатки, затем моноколесо пошагово поворачивают относительно его продольной оси и контролируют положение профиля остальных лопаток.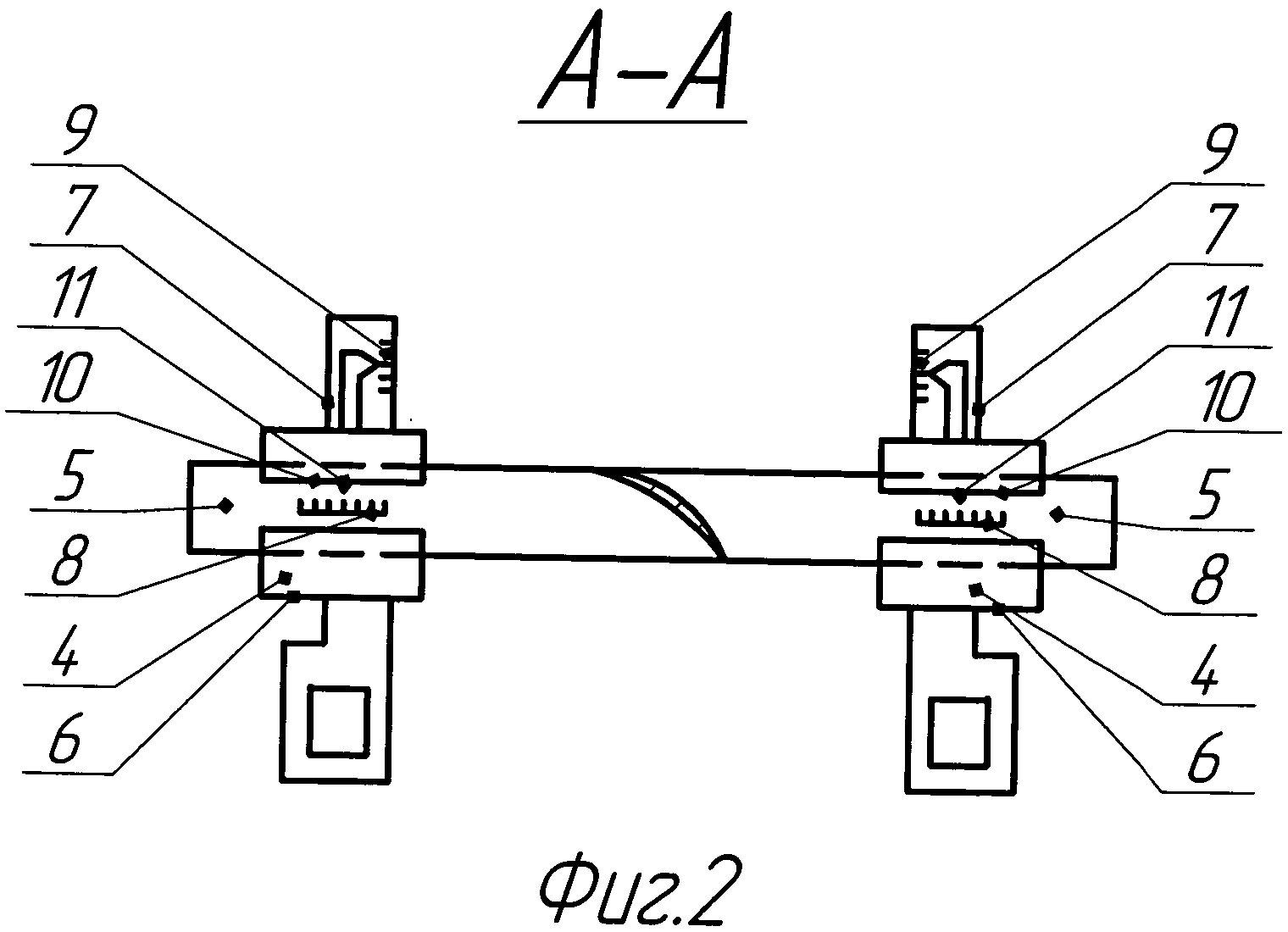
Способ определения комплекса угловых параметров пространственной ориентации бурового инструмента
Способ ионного азотирования титановых сплавов
Способ получения комбинированной формы для отливки сложных заготовок из титановых сплавов
Способ защиты интерметаллидного сплава от высокотемпературного окисления
Измеритель температуры газа газотурбинного двигателя
Способ контроля вибрационного горения в камере сгорания газотурбинного двигателя
Способ определения неуравновешенности станка-качалки скважинной штанговой насосной установки
Тепловой генератор электрической энергии для космического аппарата
Способ азотирования титановых сплавов в тлеющем разряде
Способ низкотемпературного ионного азотирования стальных изделий в магнитном поле
Способ азотирования титановых сплавов в тлеющем разряде
Способ низкотемпературного ионного азотирования стальных изделий в магнитном поле
Магнитотепловой генератор для космического аппарата
Система на магнитных подшипниках
Способ химико-термической обработки детали из легированной стали
Способ изготовления комбинированной полой лопатки турбомашины из алюминиевого сплава
Способ стабилизации выходного напряжения магнитоэлектрического генератора
Способ нанесения многослойного ионно-плазменного покрытия на поверхность гравюры штампа из жаропрочного никелевого сплава
Способ нанесения многослойного ионно-плазменного покрытия на поверхность гравюры штампа из жаропрочной стали
Способ изготовления пустотелой лопатки турбомашины

