РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА С УСОВЕРШЕНСТВОВАННЫМ УПРАВЛЕНИЕМ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к роботизированной хирургической системе, в частности к системе для миниинвазивных операций, например эндоскопических операций.
УРОВЕНЬ ТЕХНИКИ
Известны роботизированные системы для выполнения хирургических операций, в частности лапароскопических операций. Указанные роботизированные системы содержат по меньшей мере одну роботизированную руку, которой управляет хирург посредством специального пульта. Указанный пульт обычно содержит телевизионный экран, на котором показаны изображения рабочей зоны (обычно записанные посредством эндоскопической телекамеры), и подходящие манипуляторы, посредством которых хирург выполняет перемещения роботизированных рук. Манипуляторы могут быть манипуляторами "реактивного" типа, так что хирург может ощущать своими руками усилие, приложенное роботизированными хирургическими инструментами к тканям пациента.
Обычно одна из роботизированных рук перемещает телекамеру таким образом, чтобы хирург мог изменять ее угол обзора во время операции, в то время как по меньшей мере одна роботизированная рука перемещает рабочие инструменты (зажимы, ножницы, скальпели, аспираторы, и т.п.), с использованием которых хирург выполняет заданную операцию.
Управление системой отчасти осложнено для хирурга из-за большого количества средств управления и рабочих параметров, за которыми должен наблюдать хирург. В дополнение к перемещению роботизированных рук хирург также должен управлять хирургическими инструментами, установленными на роботизированных руках (например, управлять открыванием и закрыванием зажимов или ножниц), и управлять объективом телекамеры для приближения или отдаления изображения рабочей зоны в соответствии с тем, что требуется в данный момент.
Часто хирург, глядя на изображение, показываемое телекамерой, должен одновременно управлять двумя роботизированными руками с хирургическими инструментами, так что обе его руки заняты управлением соответствующими манипуляторами.
Это препятствует использованию хирургом других системных функций, или ему придется отвести одну руку от органов управления хирургическим инструментом.
Также известны системы, в которых некоторые функции активируются посредством педалей или дополнительных управляющих устройств, расположенных на манипуляторах, так что ими можно управлять пальцем без отпускания самого манипулятора. Однако все эти системы часто не являются интуитивными и в любом случае отвлекают внимание хирурга при выполнении точного маневра хирургическими манипуляторами.
Дополнительная проблема состоит в том, что внимание хирурга по той или иной причине (например, при выполнении дополнительных функций или наблюдении рабочих параметров, показанных на пульте или на других инструментах за пределами рабочей зоны) может быть отвлечено от изображения рабочей зоны. В таких условиях хирург может не заметить, как при захвате манипуляторов он непреднамеренно произведет неправильные или опасные перемещения роботизированных хирургических инструментов.
Во избежание таких ситуаций было предложено использовать педаль, посредством которой хирург активирует/деактивирует перемещение роботов, и таким образом может остановить перемещение перед отводом рук от манипуляторов и отвлечением своего внимания от рабочей зоны. Однако своевременное управление этой педалью целиком зависит от хирурга.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Основная задача настоящего изобретения состоит в создании роботизированной хирургической системы и способа управления, которые обеспечивают для хирурга возможность усовершенствованного и более безопасного управления этой системой, и таким образом, помимо прочего, обеспечивают повышение безопасности работы этой системы.
Ввиду этой задачи замысел настоящего изобретения состоит в создании роботизированной хирургической системы, содержащей по меньшей мере одну роботизированную руку, которая действует под управлением системы управления, предназначенной для хирурга, отличающейся тем, что пульт содержит отслеживающую систему "айтрекинг" для распознавания направления взгляда хирурга и ввода команд, зависящих от направлений взгляда, которые были распознаны.
Еще один замысел настоящего изобретения состоит в создании способа управления роботизированной хирургической системой, содержащей по меньшей мере одну роботизированную руку, действующую под управлением пульта управления, предназначенного для хирурга, согласно которому распознают направление взгляда хирурга и управляют функциями хирургической системы в зависимости от указанного направления взгляда, которое было распознано.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для иллюстрации инновационных замыслов настоящего изобретения и его преимуществ по сравнению с уровнем техники ниже описан пример варианта реализации, в котором реализованы указанные замыслы, со ссылкой на сопроводительные чертежи, на которых:
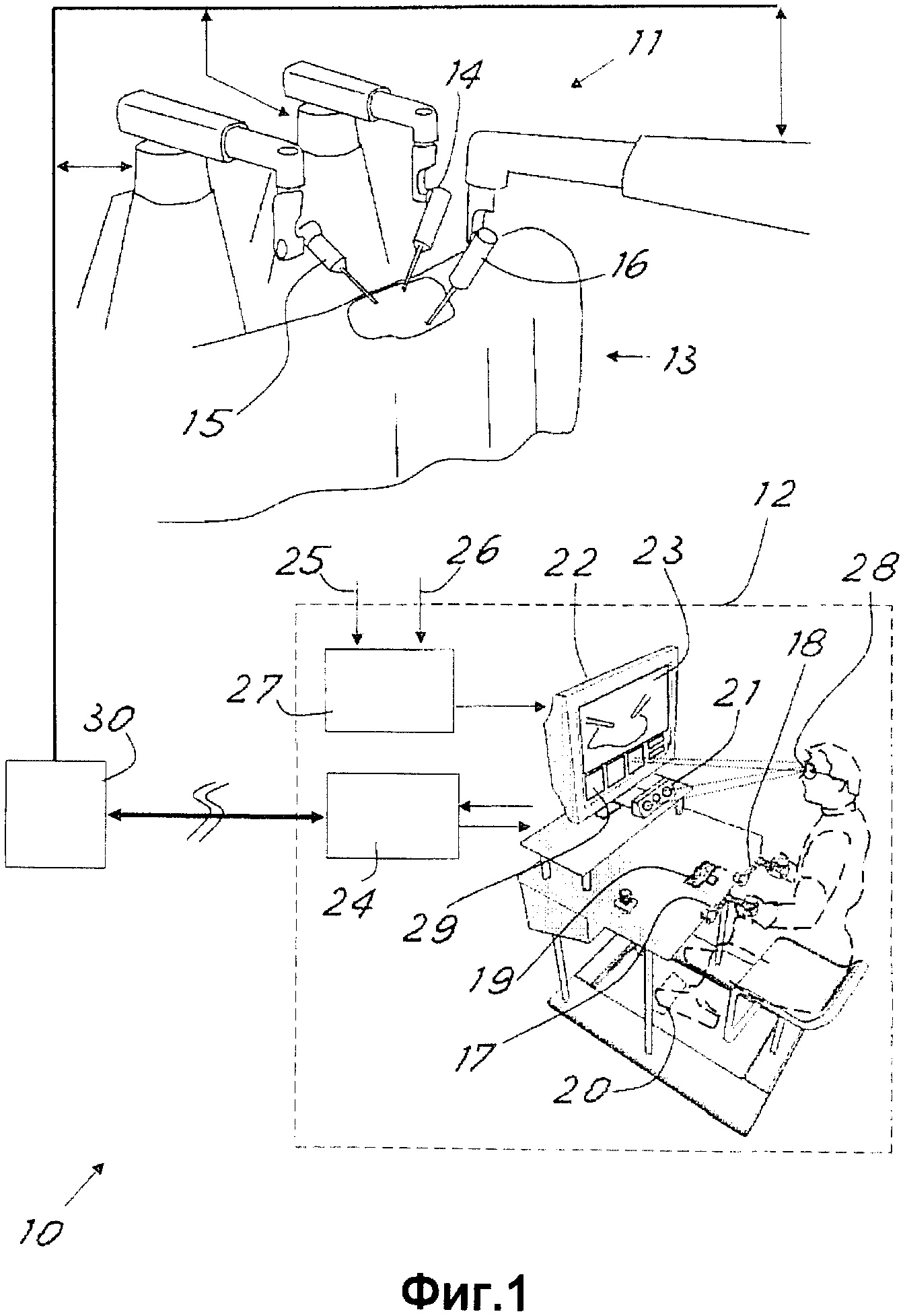
На фиг.1 схематически показан вид хирургической системы согласно настоящему изобретению.
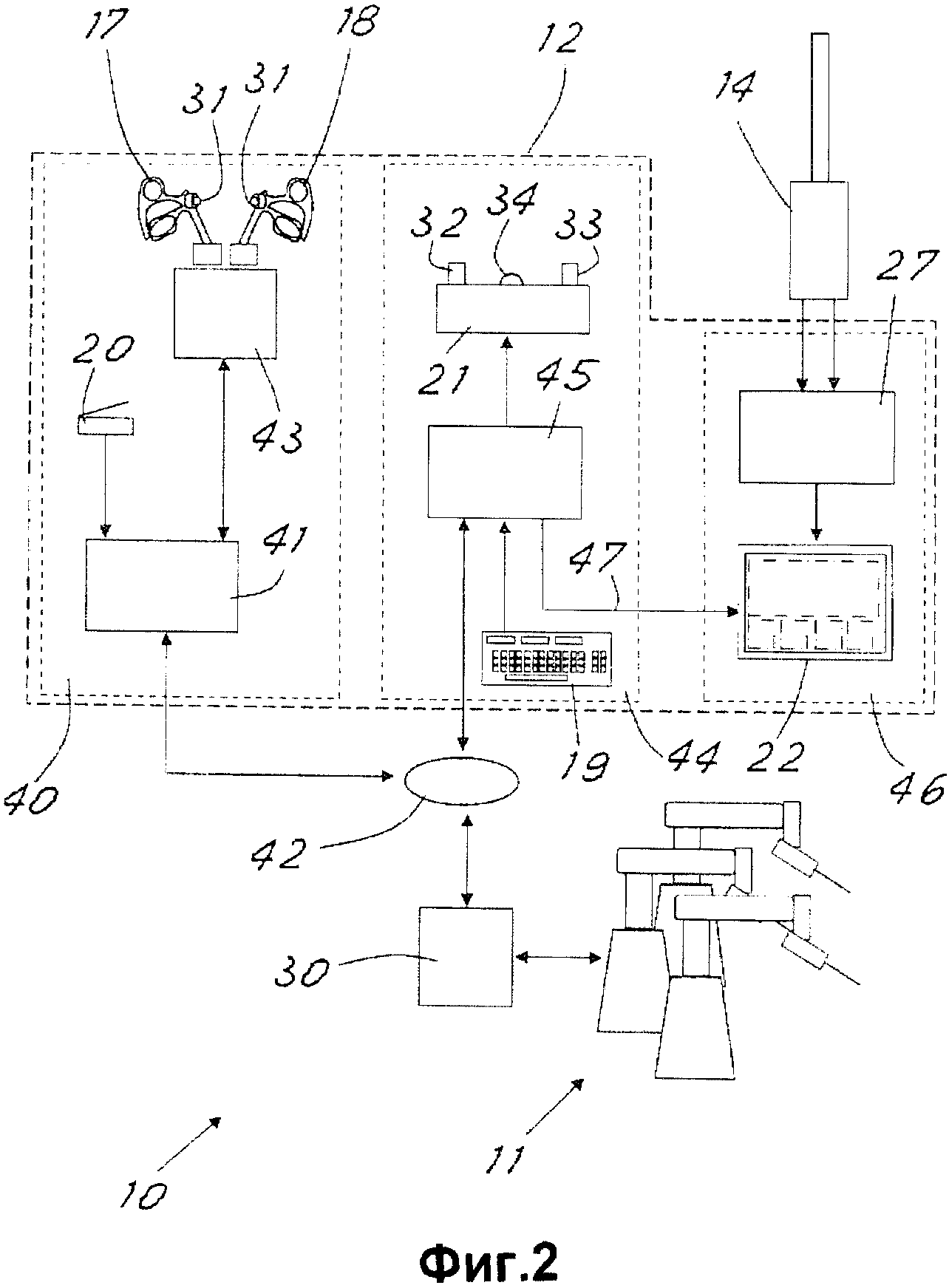
На фиг.2 показана функциональная схема системы согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 схематически показана роботизированная хирургическая система 10 согласно настоящему изобретению.
Система 10 содержит по меньшей мере одну роботизированную руку 11, которой посредством пульта 12 управления управляет хирург, например сидящий в удобном рабочем положении. Пульт также может быть установлен на колесах для облегчения его перемещения. По существу может быть использована роботизированная рука известного типа, подходящая для конкретного использования. В системе 10, показанной в настоящей заявке, использованы три роботизированные руки, хотя количество используемых роботизированных рук может быть различным.
Роботизированная рука оканчивается или роботизированные руки оканчиваются запястной частью, выполненной с возможностью удерживания хирургического инструмента и управления им для оперирования пациента 13. Указанный инструмент обычно представляет собой известный инструмент для эндоскопических и в частности лапароскопических операций. Одним из инструментов предпочтительно является телекамера 14, которая делает запись рабочей зоны (в данном случае внутренней полости пациента), в то время как другие инструменты могут быть подходящими известными хирургическими инструментами 15, 16 (зажимами, аспираторами, скальпелями и т.п.). Роботизированные руки, инструменты и приводы для управления указанными инструментами не будут описаны и показаны в настоящей заявке, поскольку являются известными и могут быть легко выбраны специалистом. Хирургические операции, которые могут быть выполнены с использованием предложенной системы, и способы их выполнения также не будут описаны в настоящей заявке, поскольку они могут быть легко выбраны специалистом.
Роботизированными руками управляет подходящий известный электронный управляющий блок 30, обеспечивающий совершение перемещений по командам, введенным с пульта 12. Блок 30 принимает команды перемещения высокого уровня (например, необходимые положение и наклон инструмента, удерживаемого роботом) и выполняет их путем их преобразования в соответствующие последовательности сигналов, которые передаются отдельным двигателям сочленений роботизированной руки. Роботизированные руки также могут быть оснащены известными тензодатчиками, которые используются блоком 30 для предотвращения повреждения из-за столкновения роботизированной руки с объектами в рабочей зоне и для соответствующей обратной связи с оператором посредством пульта, как описано ниже. Для управления манипуляторами предпочтительно могут быть использованы оптоволоконные соединения между пультом и блоком, снижающие возможность взаимного влияния между переданными сигналами.
Подходящие роботизированные руки и системы управления, например, описаны в WO2007/088208, WO2008/049898 и WO2007/088206.
Для перемещения хирургических инструментов пульт предпочтительно может содержать два известных манипулятора 17, 18, которые могут быть захвачены хирургом и перемещения которых соответственно воспроизводятся хирургическими инструментами в зависимости от перемещения роботизированных рук 11. Предпочтительно в данном случае могут быть использованы известные манипуляторы "реактивного" типа (т.е. оснащенные тактильным интерфейсом, который обеспечивает взвешенное перемещение и тактильное ощущение), так что хирург также имеет возможность ощущать переданное манипуляторами усилие, приложенное роботизированными хирургическими инструментами к тканям пациента. Подходящие тактильные интерфейсы известны в области роботизированной эндоскопической хирургии.
Обычно каждый манипулятор управляет роботизированной рукой. Предпочтительно в случае, когда используют больше двух роботизированных рук, управление на пульте сконфигурировано с возможностью назначения в случае необходимости каждого манипулятора для желательной роботизированной руки, как подробно описано ниже. Также могут быть использованы клавиатура 19 и другие устройства для ввода команд, например педальное устройство 20. Устройство 20 может содержать по меньшей мере одну педаль для активирования, например, электропитания монополярных и биполярных инструментов, функций промывания и отсасывания в случае использования указанных функций для конкретного инструмента, и т.п.
Пульт 12 также содержит отслеживающую систему 21 для отслеживания перемещения глазного яблока или так называемое устройство "айтрекинг" для распознавания направления взгляда хирурга относительно пульта, а также для управления хирургической системой в зависимости от направлений взгляда, которые были распознаны. Таким образом, хирург может управлять функциями системы посредством перемещения глаз.
Предпочтительно пульт содержит экран 22, по меньшей мере одна область 23 которого предназначена для показа вида рабочей зоны. Этот вид сформирован телекамерой 14 и может быть дополнен (например, для снабжения хирурга дополнительной информацией и/или облегчения его восприятия рабочей зоны) искусственными изображениями, выработанными компьютеризированной системой 24, которая сама по себе известна, для управления пультом, который дополнительно описан ниже.
Как описано ниже, компьютеризированная система 24 вырабатывает интерфейс "человек-машина", который обеспечивает возможность взаимодействия хирурга с хирургической системой, и управляет указанным интерфейсом.
Для обычного двухмерного рассматривания изображение, полученное с эндоскопа, может быть непосредственно показано на экране 22.
Предпочтительно для рассматривания рабочей зоны может быть использована трехмерная система. В этом случае может быть использована стереоскопическая телекамера 14 известного типа, которая формирует подходящие сигналы 25, 26, представляющие два различные "правое" и "левое" изображения, которые записаны с пространственным смещением. Сигналы 25, 26 обрабатываются электронным устройством 27, так что хирургу может быть показано трехмерное изображение посредством стереоскопической просмотровой системы.
Среди различных известных стереоскопических просмотровых систем наиболее предпочтительной является система с поляризованными фильтрами; в этой системе электронное устройство 27 содержит известный стереосмеситель, который чередует строки правого и левого изображений, принятые от телекамеры, для их чередующегося отображения в просмотровой области 23 экрана. Таким образом, чередующиеся четные и нечетные горизонтальные строки изображения на экране представляют поочередно строки правого и левого изображений, записанных телекамерой.
Область 23 оснащена известным фильтром, имеющим два различных режима поляризации для четных чередующихся строк и нечетных чередующихся строк, для просмотра такого чересстрочного изображения. Для просмотра указанного изображения хирург надевает очки 28 с двумя поляризованными линзами, поляризация которых соответствует двум режимам поляризации фильтра на экране, так что правый глаз видит только строки исходного правого изображения, записанного телекамерой, а левый глаз видит только строки исходного левого изображения, записанного телекамерой.
Таким образом, хирургу предоставлена возможность просмотра трехмерного изображения рабочей зоны.
В случае необходимости с использованием подобной процедуры также могут быть показаны в трехмерной форме искусственные стереоскопические изображения, выработанные компьютеризированной системой 24.
В любом случае посредством отслеживающей системы 21 "айтрекинг" может быть распознано направление взгляда хирурга на экран 22 и определена область экрана, на которую он смотрит или не смотрит. Использование трехмерной просмотровой системы с поляризованными очками обеспечивает отсутствие взаимных помех с системой слежения. Кроме того, очки с поляризованными линзами для трехмерного просмотра могут быть легко совмещены с обычными очками.
Было выяснено, что для системы слежения в частности предпочтительной является передача команды, которая запрещает перемещение роботизированных рук при распознавании направления взгляда хирурга за пределы экрана или по меньшей мере за пределы области экрана, воспроизводящей рабочую зону. Таким образом, создана система безопасности, которая предотвращает перемещение роботизированных рук без прямого наблюдения хирурга.
Таким образом, для активирования робота и его удерживания в активированном состоянии только при условии, что пользователь смотрит на экран, используется так называемая функция "защиты от внезапной смерти".
Предпочтительно для дополнительной безопасности может быть использовано дополнительное управляющее средство (например, кнопка 31 на рукоятке или педальном устройстве 20) в случае необходимости двойного подтверждения команды на перемещение, так что для повторной активации перемещения хирург должен смотреть на изображение на экране и одновременно подать ручную команду подтверждения, в то время как для прекращения перемещения достаточно просто отвести взгляд от изображения.
Предпочтительно в дополнение к изображению, полученному от эндоскопа, экран 22 также показывает по меньшей мере часть интерфейса "человек-машина". Компьютеризированная система 24, которая обеспечивает работу указанного интерфейса, показывает на экране области 29 выбора, связанные с системными командами. Предпочтительно указанные области выбора могут быть расположены на том же экране 22, на котором показан вид рабочей зоны. Например, указанные области выбора могут быть расположены в нижней части экрана под областью 23 для того, чтобы не препятствовать просмотру рабочей зоны. Система слежения оценивает направление взгляда хирурга и осуществляет выбор команд, связанных с областью выбора, при распознавании направления взгляда в пределах указанной области.
Тип команд, связанных с различными областями выбора, может быть любым, пригодным для использования. Например, указанные команды могут быть выбраны из числа тех, которые часто используются при выполнении роботизированной хирургической операции.
В частности предпочтительно (особенно в случае, если пульт содержит два управляющих манипулятора и по меньшей мере две роботизированные руки) команды, связанные с областями выбора, являются командами для назначения манипуляторов для роботизированных рук.
Таким образом, хирург может чередовать управление различными роботизированными руками посредством указанных двух манипуляторов без снятия своих рук с указанных манипуляторов простым переводом своего взгляда на соответствующие области выбора. Например, хирург может временно переключиться на управление роботизированной рукой, удерживающей телекамеру, для изменения вида рабочей зоны, и затем быстро возвратиться к управлению роботизированной руки, которой он только что управлял.
Предпочтительно для дополнительной безопасности пульт может содержать устройство для ввода специальной команды, подтверждающей выполнение команды, связанной с областью выбора, на которую направлен взгляд хирурга. Предпочтительно это устройство может быть кнопкой 31, расположенной на одном или обоих манипуляторах и выполненной с возможностью нажатия, например, большим пальцем руки, захватывающей манипулятор. Таким образом, обеспечена возможность облегченного подтверждения действий, активированных глазами посредством отслеживающей системы "айтрекинг", например, для выбора робота, который необходимо связать с манипулятором, для открывания/закрывания хирургических инструментов и изменения параметров настройки робота, которым управляют в данный момент времени.
Возможно также использование указанной кнопки при управлении степенью свободы крутящего перемещения инструмента (если таковое предусмотрено).
Также предпочтительно может быть предусмотрена процедура назначения робота, которая может быть выполнена путем визуального выбора изображения вновь назначаемого робота, подтверждения выбора посредством кнопки и затем перетаскиванием выбранного изображения в положение, в котором показано изображение текущего робота, ранее назначенного для праворучного захвата или леворучного захвата. Перетаскивание выполняют удерживанием кнопки в нажатом положении и направлением взгляда в местоположение робота. Для завершения операции перетаскивания кнопку отпускают с одновременным удерживанием взгляда, направленного на предварительно указанную область.
В качестве отслеживающей системы "айтрекинг" может быть использована одна из известных систем. Предпочтительно подходящая отслеживающая система "айтрекинг" в частности содержит по меньшей мере одну телекамеру для записи изображения по меньшей мере глаз хирурга и средства вычисления направления взгляда в зависимости от записанного изображения.
В частности на фиг.2 схематично показана отслеживающая система 21, содержащая две телекамеры 32, 33, которые расположены рядом на подходящем расстоянии друг от друга для записи двух пространственно смещенных изображений глаз хирурга. Вычислительные средства (например, соответственно запрограммированный микропроцессор), присутствующие в отслеживающая системе 21, могут выполнять триангуляционное вычисление направления взгляда из сравнения двух записанных изображений. К тому же, в предпочтительном варианте указанная отслеживающая система также может содержать источник 34 инфракрасного света для освещения глаз инфракрасным светом, облегчающим их распознавание в записанном изображении.
Предпочтительно отслеживающая система "айтрекинг" может быть встроена в монитор, так что при его перемещении отслеживающее устройство "айтрекинг" продолжает правильно работать.
На фиг.2 схематично показана функциональная схема предпочтительного варианта выполнения пульта. Согласно показанному варианту реализации система для удобства разделена на три основных функциональных блока или группы.
Первый блок 40 содержит компоненты, которые непосредственно используются при перемещении роботизированных рук. Блок 40 содержит первый промышленный компьютер 41, который сам по себе известен и которым управляет операционная система, работающая в режиме реального времени (например, RT-LINUX), для выполнения в заданное время команд, связанных с управлением роботами. Компьютер 41 соединен с управляющим блоком (или блоками) 30 робота посредством коммуникационной сети 42. Компьютер 41 принимает команды перемещения от манипуляторов 17 и 18, передает указанные команды роботам и вырабатывает сигналы, необходимые для работы реактивных устройств 43 манипуляторов для тактильной обратной связи. Те органы ручного управления, которые требуют немедленного ответа системы, например педали 20, если помимо прочего таковые используются для передачи команд для прекращения перемещения робота, также предпочтительно соединены с компьютером 41.
Второй функциональный блок 44 содержит второй промышленный компьютер 45, который вырабатывает интерфейс "человек-машина" и управляет указанным интерфейсом, не требующим непосредственного управления в режиме реального времени. Отслеживающая система 21, клавиатура 19 (в случае необходимости) и другие средства управления интерфейсом соединены с указанным вторым компьютером. Компьютер 45 также вырабатывает искусственные видео изображения, которые воспроизводятся на экране 22 (например, визуальные управляющие области 31), и может управлять любыми функциями для изменения масштаба изображения рабочей зоны.
Компьютеры 41 и 45 образуют компьютеризированную систему 24 для управления пультом.
Компьютеры 41 и 45 и управляющий блок 30 робота могут быть связаны друг с другом посредством сети 42. Интерфейс "человек-машина", которым управляет компьютер 45, обеспечивает возможность назначения роботов для манипуляторов, а также отображения данных, относящихся к каждому роботу, например данных об инструментах, установленных в настоящее время, о состоянии перемещения, состоянии обратной связи, о положении осей вращения инструментов, введенных в тело пациента, о состоянии робота, состоянии соединения робота, о любых экстренных состояниях, и т.п.
Третий функциональный блок 46 воспроизводит изображения на экране и реализует, например, такие функции, как PiP ("Картинка в картинке"), с использованием сигнала от телекамеры 14, записывающей рабочую зону, и сигнала 47 изображения, выработанного для отображения интерфейса «человек-машина». Третий блок также содержит стерео смеситель 27 для трехмерного просмотра.
Предпочтительно для реализации функции PiP монитор 22 оснащен двумя отдельными входами. Основной источник отображается в режиме полного экрана посредством, например, соединения DVI, в то время как посредством другого видео входа (например, соединения VGA) отображается окно вставки. Основной источник (полный экран) представляет собой двухмерное или трехмерное изображение, принятое от эндоскопической системы. Второй источник представляет собой компьютер 45, который вырабатывает интерфейс "человек-машина".
При калибровке отслеживающей системы 21 полноэкранный вид также может динамически переключаться (например, посредством последовательной команды, поданной интерфейсом "человек-машина" монитору) на видеосигнал, выработанный компьютером 45.
Предпочтительно пульт также может содержать систему для определения расстояния между экраном и глазами хирурга для изменения масштаба изображения рабочей зоны, показанной на экране, в зависимости от изменения расстояния, которое было определено.
Таким образом, хирург может интуитивно увеличивать масштаб изображения простым приближением своего лица к экрану и, наоборот, увеличивать область просмотра рабочей зоны и таким образом уменьшать масштаб изображения удалением своего лица от экрана.
Система для определения расстояния может быть реализована различными способами, которые сами по себе известны, например, с использованием телеметрических ультразвуковых измерительных устройств.
Предпочтительно отслеживающая система 21 может использоваться в соединении со стереоскопической записывающей системой, которая вычисляет посредством триангуляции расстояние до лица хирурга. Такая конфигурация вместе с соответствующей функцией распознавания глаз отслеживающей системы "айтрекинг" обеспечивает возможность точного измерения реального расстояния между глазами хирурга и экраном.
В дополнение к увеличению система также может выполнить смещение изображения, например, для его центрирования, или смещение изображения посредством взгляда вправо, влево, вверх или вниз.
При записи изображения рабочей зоны посредством телекамеры, предпочтительно эндоскопической телекамеры, установленной на одной из роботизированных рук, было выяснено, что предпочтительно отслеживающая система также обеспечивает возможность управления перемещением указанной телекамеры. При задействовании этой функции (например, путем ввода относящейся к ней активирующей команды с использованием визуального выбора подходящей области 29) перемещение глаз вдоль изображения рабочей зоны вызывает перемещение роботизированной руки для смещения и предпочтительно центрирования на экране указанной области, на которую направлен взгляд хирурга. Управление фактическим перемещением телекамеры также может быть выполнено только после нажатия подтверждающей педали или кнопки, как описано выше. Таким образом, хирург свободно перемещает свой взгляд по изображению без смещения рамки видоискателя, если одновременно не нажаты подтверждающие педаль или кнопка. При комбинировании функций перемещения и увеличения, описанных выше, система становится очень легкой в управлении, перемещения взгляда смещает рамку видоискателя на экране, в то время как перемещение глаз в направлении к экрану или от экрана увеличивает или уменьшает показанное изображение.
При использовании трехмерного просмотра рабочей зоны система для определения расстояния также может использоваться для подачи хирургу сигнала о том, что он находится в пределах оптимального диапазона расстояний от экрана.
Как известно, трехмерный эффект в трехмерных системах обычно проявляется наилучшим образом на некотором оптимальном расстоянии от экрана.
Кроме того, комбинация трехмерной просмотровой системы и отслеживающей системы "айтрекинг" налагает некоторые ограничения на расположение хирурга относительно экрана и расстояние от него до экрана, которые зависят от взаимного положения хирурга, отслеживающего устройства "айтрекинг" и просмотрового устройства.
Интерфейс "человек-машина" пульта может быть настроен с возможностью извещения хирурга посредством различных известных акустических и/или оптических систем, расположен ли он в оптимальном положении относительно экрана. Кроме того, также может быть задействована функция, которая указывает, является ли достаточным расстояние относительно отслеживающего устройства "айтрекинг". При совместном использовании трехмерного и отслеживающего устройств соответствующая рабочая зона может быть одной и той же для обоих устройств, и один и тот же индикатор может выполнять обе функции.
Рабочая зона отслеживающей системы 21 в целом выбирается больше, чем рабочая зона для оптимального просмотра трехмерного изображения. Например, рабочий диапазон отслеживающей системы, лежащий между 40 см и 75 см, является предпочтительным при возможности отслеживания глаз в пределах вертикального угла +30° и -10°. Оптимальный трехмерный вид может быть получен на расстоянии 60-70 см от экрана (в этом диапазоне информация хорошо дифференцирована между правым глазом и левым глазом) и таким образом хорошо попадает в пределы рабочей зоны отслеживающей системы. Однако все еще имеется возможность просмотра трехмерного изображения за пределами указанного диапазона при условии, что хирург соблюдает вертикальное ограничение. За пределами верхнего и нижнего краев экрана трехмерное изображение пропадает.
Таким образом, выше описано, как достигнуты задачи настоящего изобретения. Использование описанных выше системы управления и способа обеспечивает возможность управления роботизированными руками с тактильным ощущением, отображения вида, переданного эндоскопом в двухмерном или трехмерном режимах вместе с интерфейсом "человек-машина", и активирования некоторых функций, использующих устройство для отслеживания перемещений глаз. В результате использования отслеживающей системы "айтрекинг" появляются различные интересные управляющие возможности. Во-первых, среди различных функций, связанных с отслеживающей системой "айтрекинг", имеется функция, обеспечивающая возможность безопасного прекращения перемещения роботизированных рук, если хирург не смотрит на изображение рабочей зоны, причем перемещение роботизированной руки прекращается или автоматически возобновляется при распознавании направления взгляда, не попадающего или попадающего в пределы предварительно заданной области экрана.
Кроме того, интерфейс "человек-машина" является интуитивным и удобным, поскольку может управляться взглядом хирурга (вместе с устройством, подтверждающим приведение в действие, или без него). Основные преимущества состоят в том, что хирург может использовать свои глаза для выбора и назначения роботизированных рук для манипуляторов без отвода рук от манипуляторов.
Разумеется, вышеуказанное описание одного из вариантов реализации, в котором использованы инновационные замыслы настоящего изобретения, раскрыто посредством примера, и таким образом не должно расцениваться как ограничение объема прав, сформулированных в настоящей заявке. Например, пульт представляет собой удаленную операционную хирургическую рабочую станцию для роботизированной системы, которая может быть расположена в том же помещении или удалена на большое расстояние, также с использованием соединения посредством географических сетей и т.п. Основной пульт управления фактически представляет собой устройство для дистанционного управления, которое также обеспечивает возможность оперирования пациента хирургом, находящимся за пределами операционной и в любом месте в пределах, ограниченных коммуникационными задержками.
Удаленная хирургическая система является подходящей для лапароскопической или подобной операции любого типа. Очевидно, в настоящем описании термин "хирург" следует понимать как обозначающий любого человека, который управляет робототехнической системой посредством пульта.
Для специалиста очевидно что, система согласно настоящему изобретению является модульной и, например, может быть сформирована для использования большого количества роботов (например до пяти роботов), а также одного или двух пультов управления.