Результат интеллектуальной деятельности: СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ
Вид РИД
Изобретение
Изобретение относится к орбитальному движению искусственных спутников планеты, в частности - Земли (ИСЗ), совершающих групповой полет.
Известны способы группового орбитального полета космических аппаратов (КА), например, последовательно выводимых на близкие орбиты (КА "Восток-3" и "Восток-4", КА "Восток-5" и "Восток-6", КА "Союз-6", "Союз-7" и "Союз-8") - см. "Мировая пилотируемая космонавтика. История. Техника. Люди." под ред. Ю.М. Батурина, М., изд-во "РТСофт", 2005 г., стр. 19-25, 91-93 (аналоги).
Координированное (групповое, эскадренное) движение космических аппаратов в орбитальном строю осуществляется путем придания всем либо некоторым КА строя способности к согласованному программному изменению параметров своей орбиты в рамках разрешенных пространственных допусков и располагаемых запасов характеристической скорости. Аппарат, способный к выполнению координированного пространственного маневра, будем называть управляемым или активным. В свою очередь КА, не способный по каким-либо причинам к орбитальному маневру, будем называть неуправляемым или пассивным.
В качестве ближайшего аналога принят способ группового орбитального движения двух ИСЗ в рамках шведского космического эксперимента Prisma - активного (управляемого) KA Mango и пассивного (неуправляемого) КА Tango - см. Е. Землякова "Старт "Днепра": советские технологии на благо европейских заказчиков"; "Prisma: нас уже двое!" / "Новости космонавтики" №№8, 10-2010 г. Космические аппараты были запущены ракетой-носителем "Днепр" 15 июня 2010 г. на общую орбиту и в процессе полета неоднократно расходились на расстояние по фронту, дистанции и высоте до нескольких километров (при точности определения взаимного положения на уровне ~ 1 м).
К недостаткам способа - ближайшего аналога следует отнести отсутствие режима автономного управления активным КА с целью поддержания заданной (программной) конфигурации строя относительно наблюдателя на поверхности Земли, а также невозможность прямого (без существенных доработок) перенесения опыта совместного маневрирования KA Mango и Tango на группу из развернутых по фронту, дистанции и высоте трех и более ИСЗ (для поддержания заданной конфигурации строя относительно наблюдателя на поверхности Земли).
Целью предлагаемого изобретения является создание способа группового орбитального движения двух и более ИСЗ, включающего их полет по близким орбитам с возможностью изменения положения активных аппаратов относительно пассивного, при реализации которого для разнесенных по фронту дистанции и высоте ИСЗ будет поддерживаться заданная конфигурация орбитального построения относительно наблюдателя на поверхности Земли (например, в соответствии с концепцией космической рекламы).
Указанная цель достигается тем, что поддержание расстояния между ИСЗ по фронту производят путем периодического включения на ближней границе разрешенного коридора движения реактивной двигательной установки (ДУ) активного ИСЗ, тягу которой ориентируют перпендикулярно плоскости орбиты активного ИСЗ в направлении от плоскости орбиты пассивного ИСЗ, а поддержание расстояния между ИСЗ по дистанции производят периодическим изменением высоты полета активного ИСЗ с включением его ДУ вдоль местной вертикали (MB) или периодическим изменением скорости полета активного ИСЗ с включением его ДУ вдоль направления полета (НП).
Схема реализации группового орбитального движения по фронту в рамках предлагаемого технического решения для одного активного и одного пассивного ИСЗ приведена на фиг. 1.
Приняты обозначения:
1 - пассивный ИСЗ;
2 - траектория полета пассивного ИСЗ в плоскости его орбитального движения;
3 - активный ИСЗ;
4 - траектория полета активного ИСЗ;
5 - ближняя граница разрешенного коридора движения активного ИСЗ по фронту;
6 - дальняя граница разрешенного коридора движения активного ИСЗ по фронту;
7 - зона включения реактивной ДУ активного ИСЗ;
8 - направление вектора тяги реактивной ДУ.
Затраты характеристической скорости активного ИСЗ на поддержание своего места внутри разрешенного коридора движения по фронту можно оценить следующим образом.
Пусть ИСЗ движутся по круговой орбите с периодом Τ, при этом гравитационное поле Земли будем считать центральным ньютоновским. При этом пассивный ИСЗ поз. 1 движется по траектории поз. 2, а активный ИСЗ поз. 3 - по «параллельной» траектории поз. 4.
Для записи уравнений движения активного ИСЗ относительно пассивного КА введем орбитальную систему координат Oxyz с началом в центре масс О пассивного аппарата. Ось Oz орбитальной системы координат направлена вдоль радиус-вектора пассивного ИСЗ поз. 1 от центра Земли, ось Ox лежит в плоскости орбиты КА и направлена в сторону его движения.
Линеаризованные уравнения неуправляемого движения объектов в малой окрестности пассивного ИСЗ имеют вид:
где  - орбитальная угловая скорость пассивного ИСЗ. Уравнения (1) называют уравнениями Хилла-Клохесси-Уилтшира (см., например, Clohessy W.H., Wiltshire R.S. Terminal Guidance System for Satellite Rendezvous // Journal of the Astronautical Sciences. 1960. V. 27. №9. P. 653-678).
- орбитальная угловая скорость пассивного ИСЗ. Уравнения (1) называют уравнениями Хилла-Клохесси-Уилтшира (см., например, Clohessy W.H., Wiltshire R.S. Terminal Guidance System for Satellite Rendezvous // Journal of the Astronautical Sciences. 1960. V. 27. №9. P. 653-678).
Данные уравнения допускают семейство периодических решений

где А и Ф - произвольные постоянные. Решения (2) соответствуют перемещению активного КА вдоль оси Oy (по фронту) на одной высоте с пассивным ИСЗ.
Нетрудно проверить, что решения (2) неустойчивы по Ляпунову. Однако эта неустойчивость слаба - в общем случае она характеризуется линейным возрастанием по времени начальных возмущений. Поэтому можно утверждать, что, при необходимости, уход активного КА с оси Oy можно предотвратить с помощью управляющих воздействий.
Пусть для заданного функционирования спутниковой группировки требуется удерживать расстояние d между активным КА поз. 3 и плоскостью орбиты пассивного ИСЗ поз. 1 в некотором интервале I=[dmin, dmax] - иначе, между ближней поз. 5 и дальней поз. 6 границами разрешенного коридора движения по фронту (см. фиг. 1).
В момент времени t=0 разместим активный КА поз. 3 на оси Oy орбитальной системы координат на расстоянии dmax от пассивного аппарата поз. 1 (т.е. на дальней границе поз. 6), не сообщая ему скорости, т.е.  В этом случае движение активного КА в последующие моменты времени описывается формулой
В этом случае движение активного КА в последующие моменты времени описывается формулой
y(t)=dmax cosωt
В момент времени  расстояние между ИСЗ поз. 1 и поз. 3 достигнет ближней границы поз. 5 разрешенного коридора - т.е. значения dmin. Скорость сближения космических аппаратов в этот момент составит
расстояние между ИСЗ поз. 1 и поз. 3 достигнет ближней границы поз. 5 разрешенного коридора - т.е. значения dmin. Скорость сближения космических аппаратов в этот момент составит

Сообщим теперь активному КА импульс Δv вдоль оси Oy (посредством тяги ДУ поз. 8), изменяющий знак относительной скорости

После такого импульса активный КА поз. 3 удалится от пассивного ИСЗ поз. 1 на расстояние dmax, а потом опять начнется сближение. Как только расстояние между ИСЗ поз. 1 и поз. 3 станет равно dmin, к активному КА поз. 3 снова прикладывается импульс Δv с направлением вектора тяги ДУ поз. 8 в соответствии с фиг. 1. При этом временной интервал Ti между импульсами составит
Если активный КА поз. 3 должен двигаться заданное (относительно длительное) время Ttotal(>>Ti) в разрешенном коридоре (на расстоянии по фронту в интервале I), то суммарные затраты характеристической скорости Δvtotal на поддержание такого движения можно оценить следующим образом
При этом количество импульсов Ntotal для поддержания активного КА поз. 3 в разрешенном коридоре составит
При уменьшении интервала допустимых расстояний (|dmax-dmin|→0) количество импульсов неограниченно возрастает, а суммарные затраты характеристической скорости стремятся к пределу Δνtotal=ω2dmaxTtotal.
В качестве примера представлены затраты характеристической скорости для удержания активного КА поз. 3 массой 250 кг на расстоянии по фронту от пассивного КА поз. 1, не превосходящем dmax=200 м, в течение Ttotal=30 суток. Пассивный КА движется по круговой орбите высотой ~300 км (период орбитального движения Т=1 час 30 мин). Результаты расчетов приведены ниже.
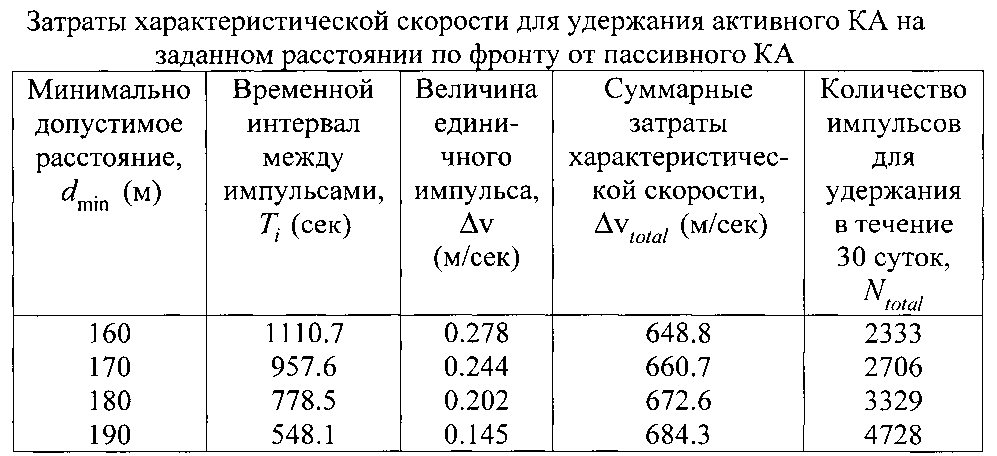
Следует отметить, что рассмотренный выше срок удержания активного КА в разрешенном коридоре по фронту - 30 суток - можно считать предельным (максимальным по продолжительности) практически для любых миссий, требующих «жесткого» (неизменного для наземного наблюдателя) группового движения ИСЗ. При этом суммарные затраты характеристической скорости ИСЗ представляются вполне приемлемыми (так, ИСЗ типа «Полет», запускаемые с 1963 г., имели запас характеристической скорости ~1200 м/с - см., например, Л.Е. Макаров, В.А. Поляченко, М.А. Хомяков, А.В. Благов и др. «60 лет самоотверженного труда во имя мира», М., издат. дом «Оружие и технологии», 2004 г., стр. 242).
Что касается поддержания расстояния между ИСЗ поз. 1 и поз. 3 по дистанции (т.е. вдоль направления полета пассивного КА), то для групповых орбит одинаковой (близкой по значению) высоты и эксцентриситета требуется периодическое включение реактивной ДУ активного аппарата поз. 3 в плоскости его орбиты. При этом, в случае отставания активного КА поз. 3 от пассивного КА поз.1 (например, вследствие деформации эксцентриситета орбиты при действии внешних и/или внутренних возмущающих факторов и соответствующего местного рассогласования текущих высот ИСЗ группы), направление вектора тяги ДУ формируется таким образом, чтобы активный КА поз. 3 в плоскости своей орбиты увеличил местную скорость. Это, в частности, достигается либо посредством дозированного уменьшения высоты орбиты KA поз. 3 с соответствующим увеличением линейной и угловой орбитальной скорости движения аппарата (включением ДУ «вниз» вдоль MB), либо посредством набора дополнительной орбитальной скорости на некотором отрезке траектории (включением ДУ КА поз. 3 вдоль НП «на разгон»), с последующей коррекцией изменения высоты и эксцентриситета новой орбиты для продолжения группового полета.
Соответственно, в случае отставания пассивного КА поз. 1 от активного КА поз. 3 - направление вектора тяги реактивной ДУ также формируется в плоскости орбиты активного аппарата, но при этом производится либо дозированное увеличение высоты орбиты КА поз. 3 с соответствующим уменьшением линейной и угловой орбитальной скорости движения активного КА (включением ДУ «вверх» вдоль MB), либо посредством уменьшения орбитальной скорости КА поз. 3 на некотором отрезке траектории (включением ДУ вдоль НП «на торможение»), с последующей коррекцией изменения высоты и эксцентриситета новой орбиты для продолжения группового полета.
Периодичность задействования ДУ активного аппарата определяется величиной отрезка траектории, на котором сохраняется уровень допустимых искажений орбитального изображения при групповом полете КА. Чем строже требования к четкости конфигурации строя - тем чаще требуются сеансы коррекции траектории. В ряде случаев представляется целесообразным «объединить» импульсы коррекции по фронту и дистанции путем их «геометрического» сложения и выдачи в зоне ближней границы разрешенного коридора движения по фронту поз. 5 - иначе, при реализации dmin.
Следует отметить, что, в зависимости от характера деформации формы орбиты каждого активного КА поз. 3 относительно формы орбиты пассивного КА поз. 1 (которая выступает в роли опорной) - запасы характеристических скоростей различных КА поз. 3 будут расходоваться неодинаково. В этой связи допускается перестроение активных КА поз. 3 таким образом, чтобы КА с максимальными запасами топлива располагались в наиболее энергоемкой периферийной части орбитального построения.
Эволюция орбиты пассивного КА из-за нецентральности гравитационного поля Земли не должна существенным образом повлиять на приведенные выше оценки затрат характеристической скорости активных КА группы - т.е. для парирования небольших отличий в характере эволюции близких орбит потребуются весьма незначительные дополнительные импульсы, что следует, например, из уравнений Седвика-Швайгарда, позволяющих учесть влияние на динамику КА второй гармоники геопотенциала (см., например, Schweighart S., Sedwick R.J. High-Fidelity Linearized J2 Model for Satellite Formation Flight // Journal of Guidance, Control, and Dynamics. 2002. T. 25. №6. P. 1073-1080).
Применение предложенного технического решения целесообразно для эскадренных ИСЗ космической рекламы, групповых КА-мишеней для калибровки и юстировки оптических (в том числе лазерных) и радиотехнических наземных комплексов контроля космического пространства, ΚΑ-инспекторов некооперированных орбитальных объектов, при осуществлении координированных многопозиционных измерений параметров космического пространства и верхней атмосферы Земли в интересах научного знания, а также в целом ряде других практических приложений.
Способ группового орбитального движения искусственных спутников Земли (ИСЗ), включающий их полет по близким орбитам с возможностью изменения положения активных ИСЗ относительно пассивного ИСЗ по фронту, дистанции и высоте, отличающийся тем, что поддержание расстояния между ИСЗ по фронту производят путем периодического включения на ближней границе разрешенного коридора движения каждого активного ИСЗ реактивной двигательной установки (ДУ) активного ИСЗ, тягу которой направляют перпендикулярно плоскости орбиты активного ИСЗ в сторону от плоскости орбиты пассивного ИСЗ, а поддержание расстояния между ИСЗ по дистанции производят периодическим изменением высоты полета каждого активного ИСЗ с включением его ДУ вдоль местной вертикали или периодическим изменением скорости полета каждого активного ИСЗ с включением его ДУ вдоль направления полета.
Многоцелевая трансформируемая орбитальная система и способ ее применения
Ракетно-космический комплекс и способ функционирования ракетно-космического комплекса
Способ поражения цели сверхзвуковой крылатой ракетой и сверхзвуковая крылатая ракета для его осуществления
Способ старта и подъема летательного аппарата самолетного типа
Способ аэродинамического управления летательным аппаратом
Способ передачи визуально воспринимаемой информации
Способ обеспечения теплового режима приборного отсека летательного аппарата
Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера
Способ обнаружения и поражения воздушной цели ракетным комплексом
Способ селекции морской цели оптико-электронной системой летательного аппарата
Способ самонаведения крылатой ракеты
Вакуумный комплекс термического отжига полупроводниковых пластин
Устройство для нанесения сверхтолстых слоев поликристаллического кремния

