Результат интеллектуальной деятельности: СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНЫХ И УГЛОВЫХ ПЕРЕГРУЗОК ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ
Вид РИД
Изобретение
Группа изобретений относится к области транспорта, а именно к способу снижения динамической нагруженности транспортного средства при движении по поверхности, и транспортным средствам, реализующим этот способ.
Из уровня техники известны способы снижения вертикальных и угловых перегрузок (то есть динамической нагруженности) транспортного средства при движении по поверхности и транспортные средства, реализующие эти способы.
Так, в патенте России №2483938, дата регистрации 10.06.2013 [1], представлен способ снижения динамической нагруженности транспортного средства при движении по поверхности, основанный на регулировании жесткости и демпфирования установленного на транспортном средстве, по меньшей мере, одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему.
Недостаток данного способа снижения динамической нагруженности транспортных средств состоит в том, что быстродействие изменения характеристики по жесткости амортизационной стойки недостаточно. При этом присущее исполнительным органам запаздывание в отработке сигналов управления ограничивает возможности снижения динамических нагрузок при встрече с неровностями пути.
В патенте [1] также представлено транспортное средство (в том числе самолет), реализующее этот способ, содержащее корпус, амортизационное устройство, систему управления жесткостью и демпфированием амортизационного устройства, систему управления, логико-вычислительную подсистему, оснащенную блоком памяти, содержащим информацию о реакции модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства.
Недостаток такого транспортного средства состоит в том, что быстродействие изменения характеристики по жесткости амортизационной стойки недостаточно. При этом присущее исполнительным органам запаздывание в отработке сигналов управления ограничивает возможности снижения нагрузок при встрече с неровностями пути.
Изобретение [1] принято в качестве наиболее близкого аналога заявленного способа и транспортного средства.
Решаемой группой изобретений задачей является снижение вертикальных и угловых перегрузок транспортного средства при движении по неровной поверхности.
Технический результат группы изобретений состоит в повышении быстродействия срабатывания амортизационной системы при движении транспортного средства по поверхности.
Сущность группы изобретений состоит в следующем.
Способ снижения вертикальных и угловых перегрузок транспортного средства при движении по поверхности, как и в наиболее близком аналоге [1], основан на регулировании жесткости и демпфирования установленного на транспортном средстве, по меньшей мере, одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающем информацию в логико-вычислительную подсистему, но в отличие от наиболее близкого аналога [1], в качестве исходных данных от логико-вычислительной подсистемы в систему управления поступают текущие параметры: коэффициенты жесткости и демпфирования амортизационных стоек амортизирующего устройства, скорость и кинематические параметры движения транспортного средства (продольные, вертикальные и поперечные перемещения, угловые перемещения относительно продольной, поперечной и вертикальной осей транспортного средства и их производные), по которым в логико-вычислительной подсистеме вычисляют перегрузки транспортного средства в различных его частях, сравнивают их с нормированными по типу неровностей поверхности, после чего выдают команды на изменение характеристик по жесткости и демпфированию, по меньшей мере, одного амортизирующего устройства.
Способ снижения вертикальных и угловых перегрузок транспортного средства характеризуется тем, что при перегрузке, превышающей нормированную величину, уменьшают коэффициенты жесткости амортизационных стоек путем увеличения объема пневмоаккумулятора соответствующей амортизационной стойки амортизирующего устройства.
Способ снижения вертикальных и угловых перегрузок транспортного средства характеризуется тем, что при уменьшении величин неровностей поверхности, полученных при сканировании, коэффициенты жесткости увеличивают путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа соответствующей амортизационной стойки амортизирующего устройства.
Способ снижения вертикальных и угловых перегрузок транспортного средства характеризуется тем, что при перегрузке ниже нормированной из логико-вычислительной подсистемы в систему управления выдается сообщение о возможности увеличения скорости транспортного средства.
Транспортное средство, как и в наиболее близком аналоге [1], содержит корпус, амортизационное устройство, систему управления жесткостью и демпфированием амортизационного устройства, систему управления, логико-вычислительную подсистему, оснащенную блоком памяти, содержащим информацию о реакции модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства, но в отличие от наиболее близкого аналога [1], по меньшей мере, одно амортизационное устройство содержит амортизационную стойку, пневматически связанный с ней пневмоаккумулятор, выполненный с возможностью изменения его объема и давления запитки.
Транспортное средство характеризуется тем, что пневмоаккумулятор оснащен мембранами с образованием, по меньшей мере, трех отсеков, пневматически связанных между собой управляемыми клапанами, при этом каждый из отсеков пневматически связан посредством клапанов с электромагнитным управлением с системой подкачки.
Транспортное средство характеризуется тем, что система подкачки оснащена ресивером или компрессором.
Транспортное средство характеризуется тем, что гидравлическая связь пневмоаккумулятора с амортизационной стойкой содержит дроссель, выполненный с возможностью изменения площади проходного отверстия.
Представленные признаки образуют совокупность, обеспечивающую достижение заявленного технического результата.
Группа изобретений поясняется чертежами.
На фиг. 1 представлена модель и принципиальная схема управления установленной на транспортном средстве амортизационной стойки с регулируемыми характеристиками по жесткости и демпфированию.
На фиг. 2 представлено нормирование типов неровностей, характерных для поверхности перемещения транспортного средства.
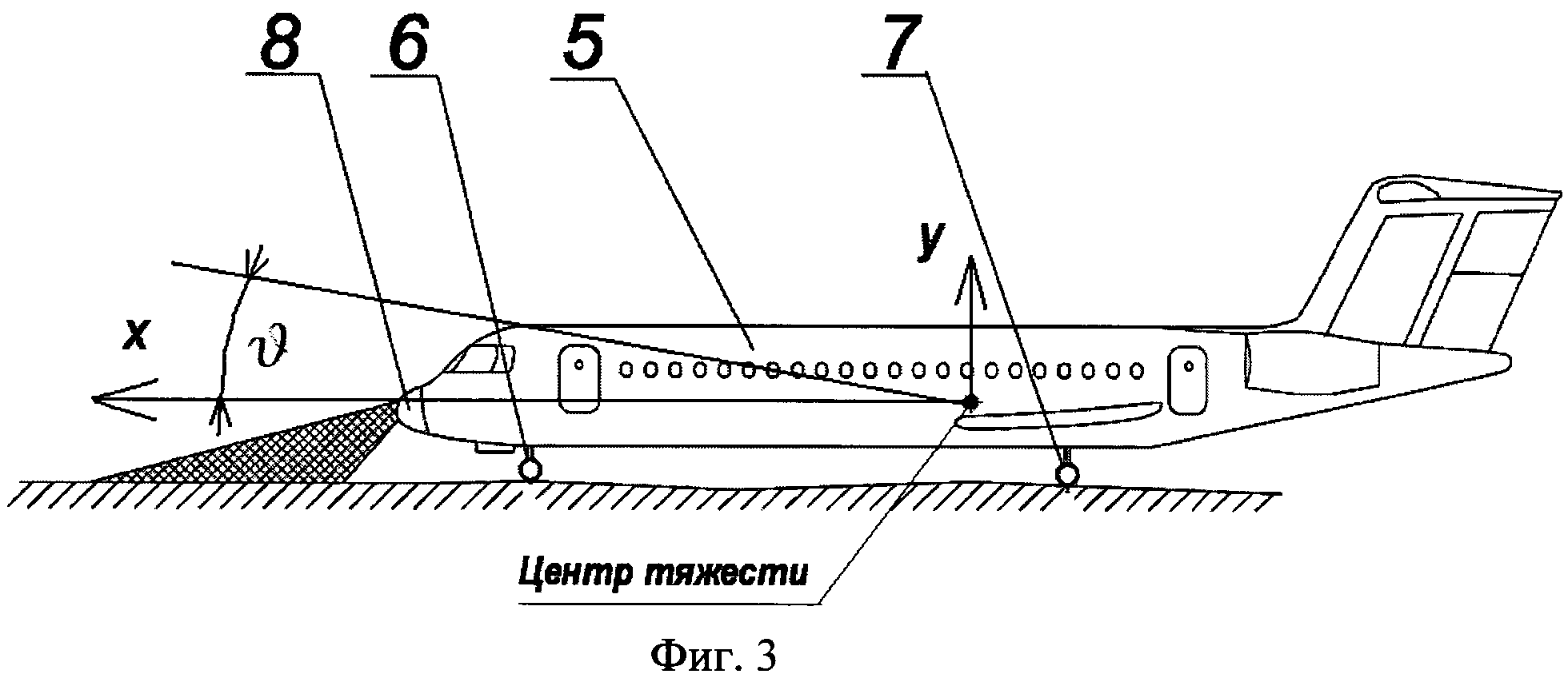
На фиг. 3 показан общий вид самолета со сканирующим устройством.
На фиг. 4 представлена структурная схема системы управления характеристиками жесткости и демпфирования амортизационной стойки шасси транспортного средства.
На фиг. 5 представлена алгоритмическая схема работы системы управления характеристиками амортизационных стоек шасси по жесткости и демпфированию.
Реализация группы изобретений.
Предлагаемый способ снижения вертикальных и угловых перегрузок транспортного средства при движении по поверхности основан на регулировании жесткости и демпфирования установленного на транспортном средстве, по меньшей мере, одного амортизирующего устройства посредством подачи в систему управления жесткостью и демпфированием управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию о параметрах неровностей в логико-вычислительную подсистему, при этом в качестве исходных данных в логико-вычислительной подсистеме используются коэффициенты жесткости и демпфирования амортизационных стоек амортизирующего устройства, текущие значения скорости движения и кинематические параметры транспортного средства (продольные, вертикальные и поперечные перемещения, угловые перемещения относительно продольной, поперечной и вертикальной осей транспортного средства и их производные), в том числе перегрузки транспортного средства в различных его частях, по которым в логико-вычислительной подсистеме вычисляют перегрузку и после сравнения перегрузки с нормированной по типу неровностей поверхности выдаются команды в систему управления на изменение характеристик по жесткости и демпфированию, по меньшей мере, одного амортизирующего устройства.
При рассчитанной перегрузке, превышающей нормированную величину, коэффициенты жесткости амортизационных стоек амортизирующего устройства уменьшают путем увеличения объема пневмоаккумулятора соответствующей амортизационной стойки амортизирующего устройства.
При рассчитанной перегрузке ниже нормированной величины, коэффициенты жесткости увеличивают путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа соответствующей амортизационной стойки амортизирующего устройства.
Кроме того, при рассчитанной перегрузке ниже нормированной из логико-вычислительной подсистемы в систему управления подается команда на увеличение скорости транспортного средства.
Для реализации способа предварительно создают модель 1 амортизационной стойки шасси 2 транспортного средства с моделированием жесткости и демпфирования шасси 2, соединенного с корпусом 3 транспортного средства (фиг. 1). Модель 1 амортизационной стойки шасси 2 может выполняться как физической, так и математической, обеспечивающей верификацию результатов расчета с физическим экспериментом, и физического эксперимента с динамическими характеристиками транспортного средства. Затем проводят испытания модели 1 при разных параметрах жесткости и демпфирования, а также с различной нагрузкой на корпус 3 транспортного средства, при движении над разными типами неровностей с различной скоростью V. На фиг. 2 представлен пример типов неровностей и их нормирование для поверхности взлетно-посадочной полосы (ВПП): А - ВПП с твердым покрытием (Н3); Б - ВПП элементарно подготовленные (Н2); В - неподготовленные ВПП (H1).
Результаты реакции модели 1 амортизационной стойки 2 шасси в процессе преодоления неровностей поступают в логико-вычислительную подсистему 4 (фиг. 1). При этом в качестве регистрируемых параметров в модели 1 записывают следующие реакции модели 1 амортизационной стойки шасси 2 с фиксированной жесткостью, а также корпуса 3: скорость v=dx/dt, угол тангажа ϑ, угловую скорость dυ/dt, перегрузку в центре тяжести корпуса 3 d2yg/dt2 и перегрузки по осям каждой из амортизационной стоек d2yi/dt2 (фиг. 1), где х - продольная ось, вдоль которой происходит движение транспортного средства, t - время, yg - координата центра тяжести транспортного средства по вертикали, yi - координата i-й амортизационной стойки по вертикали.
Затем блок 4 размещают на транспортном средстве 5, например на самолете (фиг. 3), оснащенном передней 6 и задними 7 амортизационными стойками, структурная схема которых совпадает с моделью 1 амортизационной стойки с регулируемой жесткостью шасси 2 (фиг. 1), соединенного с корпусом 3 транспортного средства 5. На транспортное средство 5 устанавливают сканирующее устройство, например сканер 8 поверхности, расположенной перед транспортным средством 5 в направлении движения. В логико-вычислительную подсистему 4 поступают полученные при сканировании данные о высоте ΔhНЕР и длине L впереди расположенной неровности, а также обработанная информация от датчиков (на фиг. не показаны) по кинематическим параметрам транспортного средства 5, в частности v=dx/dt; υ; dυ/dt; d2yg/dt2; d2yi/dt2 и др.
Как показано на фиг. 1, в модели 1 конструкции передней 6 и задней 7 амортизационных стоек заложена возможность управления характеристиками их жесткости и демпфирования.
При движении по поверхности транспортное средство 5, например самолет на этапе разбега и пробега, оборудованное сканером 8, сканирует неровности поверхности в направлении движения транспортного средства 5. Результаты сканирования передаются в электронный блок логико-вычислительной подсистемы 4. Затем по уже настроенному алгоритму вырабатываются сигналы для исполнительных механизмов (ИМ), изменяющих характеристики жесткости соответствующей передней 6 и/или задней 7 амортизационной стойки за счет изменения в пневмоаккумуляторе 9 объема, например, полостей 10, образованных между мембранами 11 (фиг. 1), или давления его запитки.
Например, при обнаружении сканером 8 неровностей, характерных для неподготовленных ВПП - H1 (фиг. 2) по ходу движения транспортного средства 5, логико-вычислительной подсистемой 4 подается сигнал на открытие установленных на мембранах 11 между полостями 10 клапанов 12 и 13 с электромагнитным управлением посредством электромагнитных катушек соответственно «с1» и «с2». При этом происходит увеличение объема пневмо-аккумулятора 9 соответствующей амортизационной стойки 6 и/или 7, снижение избыточного давления инертного газа в этом объеме и тем самым снижение жесткости амортизационной стойки 6 и/или 7. Действующие на транспортное средство 5 перегрузки при таких параметрах жесткости будут меньше.
В случае, если сканер 8 обнаружит по ходу движения транспортного средства 5 поверхность с неровностями, характерными для хорошо подготовленных ВПП (фиг. 2), логико-вычислительная подсистема 4 подает сигналы ИМ, обеспечивающие увеличение коэффициентов жесткости соответствующих амортизационных стоек 6 и/или 7. Для увеличения жесткости амортизационной стойки 6 и/или 7 амортизационного устройства необходимо повысить избыточное давление инертного газа запитки пневмоаккумулятора 9, либо уменьшить объем пневмоаккумулятора 9. Эти процессы выполняются закрыванием клапанов 12 и 13 за счет отключения сигналов с катушек «с1» и «с2». Подкачка давления в отдельные полости 10 пневмоаккумулятора 9 выполняется за счет клапанов с электромагнитным управлением 14, 15, 16 при включении сигналов «а1», «а2», «а3» (фиг. 1). Уровень давления устанавливается редукционными клапанами 17, 18, 19 с пропорциональным управлением посредством сигналов «b1», «b2», «b3». Воздух к клапанам поступает от ресивера 20 или компрессора.
За счет изменения проходной площади отверстия дросселя 21 возможно изменять демпфирующую характеристику амортизационных стоек 6, 7 шасси 2 транспортного средства 5.
В качестве транспортного средства 5 может использоваться самолет, наземное транспортное средство повышенной проходимости, гидросамолет или другое транспортное средство, оснащенные амортизационными стойками 6, 7, соответствующими модели 1, с регулируемой жесткостью и демпфированием, сканером 8, логико-вычислительной подсистемой 4.
При использовании в качестве транспортного средства 5 самолета, как показано на фиг. 3, самолет оснащается тремя амортизационными стойками, соответствующими модели 1: одной передней 6 и двумя задними основными 7. На самолете установлены: сканер 8 поверхности, блок с логико-вычислительной подсистемой 4, на которую приходит информация о типах неровностей опорной поверхности (фиг. 2), а также информация с датчиков о параметрах движения транспортного средства 5, затем эта информация обрабатывается и выдаются сигналы для ИМ на изменение характеристик жесткости и демпфирования амортизационных стоек 6, 7 шасси 2.
Способ изменения характеристик по жесткости и демпфированию амортизационной стойки 6, 7, соответствующих модели 1, включает алгоритм обработки, вычисления и подачи сигналов на ИМ (фиг. 4). Блок логико-вычислительной подсистемы 4 получает и обрабатывает сигналы о движении транспортного средства 5, информацию со сканера 8 о неровностях впереди расположенной опорной поверхности. Затем информация поступает на изменение параметров жесткости и демпфирования амортизационных стоек 6, 7 способом, описанным выше, с подачей электромагнитных сигналов на соответствующие клапаны 12, 13 (на фиг. 4 не показаны). В блок 22 заложены основные параметры транспортного средства 5 (его масса, инерционные характеристики, развесовка, двигатели и т.п.). В блок 23 заложено описание аэродинамических сил и моментов, действующих на транспортное средство 5 при его движении. С использованием блоков 24, 25, 26, куда заложены аналитические соотношения, связывающие параметры движения транспортного средства 5, а также блоков-сумматоров 27, 28, 29 рассчитывается информация о вторых производных параметров движения транспортного средства: линейных и угловых ускорениях d2xg/dt2, d2yg/dt2, d2υ/dt2. Затем с использованием интегрирующих блоков 30, 31, 32, 33, 34, 35 находятся первые производные параметров движения транспортного средства 5, а также его перемещения по линейным и угловым координатам х, у, ϑ (фиг. 3). С использованием данного алгоритма (фиг. 4), а также при использовании экспериментальных исследований конкретных объектов можно корректировать алгоритм, изменять коэффициенты усиления управляющих пропорциональных сигналов, а также изменять структуру эталонной электронной модели 36 транспортного средства 5 логико-вычислительной подсистемы 4 и модели 1 амортизационных стоек 6, 7 транспортного средства 5.
Представленная на фиг. 5 алгоритмическая схема работы системы управления характеристиками амортизационных стоек 6, 7 шасси 2 по жесткости рассмотрена на примере выполнения транспортного средства 5 в виде самолета (фиг. 3).
Работа системы управления заключается в следующем. В качестве исходных данных от информационной подсистемы в систему управления поступают коэффициенты жесткости сj и демпфирования kj амортизационных стоек 6, 7, перегрузки ni, различных частей самолета, скорость движения самолета по ВПП vЛА, а также параметры расположенной впереди неровности ВПП ΔhНЕРi, L, сканируемой и распознаваемой сканером 8. Затем при разбеге самолета по ВПП сравнивается перегрузка в различных частях самолета ni с допускаемой нормированной для данного типа самолета перегрузкой nнорм. Если текущая перегрузка ниже нормированной, то система управления дает команду на дальнейшее повышение скорости. Сравнение перегрузок происходит через интервалы времени Δt. Работа системы управления продолжается до тех пор, пока самолет не наберет взлетную скорость. После отрыва самолета от ВПП система управления параметрами амортизационных стоек 6, 7 шасси 2 отключается.
В случае, если текущие перегрузки превышают нормированные, алгоритм работы системы управления происходит по другому сценарию. Начинается сравнение сканируемой неровности ΔhНЕР и некоторой максимально установленной. При этом включается счетчик циклов «m». Если неровность больше максимально установленной, то ВПП относится, согласно фиг. 2, к полосам типа «Б» (элементарно подготовленные) или «В» (неподготовленные). Для такого типа ВПП необходимо снижать коэффициенты жесткости амортизационных стоек 6, 7 за счет увеличения объема пневмоаккумулятора 9, т.е. открывая установленные в мембранах 11 клапаны 12, 13 электромагнитными катушками «c1» и «c2» и соединяя полости 10 пневмоаккумулятора 9 между собой. Через промежуток времени Δt опять сравниваются текущие перегрузки с нормированными. Если текущие перегрузки снова являются более высокими по сравнению с нормированными, сценарий алгоритма системы управления идет по этой же ветви. В случае появления впереди расположенных сканируемых неровностей ВПП, характерных для полос типа «А» (бетонные ВПП) (фиг. 2), коэффициенты жесткости, наоборот, стараются повысить, уменьшив объем пневмоаккумулятора 9 и повысив в рабочем объеме избыточное давление инертного газа. Это осуществляется за счет закрытия установленных в мембранах 11 клапанов 12, 13 электромагнитными катушками «c1», «c2», открытия клапана, например, 14 с электромагнитным управлением посредством сигнала «a1» и редукционного клапана 17 с пропорциональным электромагнитным управлением посредством сигнала «b1», который устанавливает давление в рабочей полости 10 пневмоаккумулятора 9 пропорционально величине неровности ВПП (сигнал b1~k·hHEP.i) (фиг. 1).
Эта ветвь алгоритма повторяется, в случае необходимости, «z» раз, где «z» - целое число, установленное ответственным исполнителем. В случае, если z>m, происходит подача сигнала пилоту о том, что данная ВПП не предполагает взлет самолета без превышения, установленного предприятием-изготовителем допустимого уровня вертикальных перегрузок, и пилотом принимается решение на торможение или продолжение взлета самолета. После этого система управления заканчивает свою работу и отключается.
Описанная совокупность признаков представленного способа и транспортного средства обеспечивает повышение быстродействия срабатывания амортизационной системы, что способствует эффективному снижению перегрузок при движении транспортного средства по неровной поверхности.
Представленный уровень раскрытия способа и устройства, реализующего способ, достаточен для разработки в специализированных организациях транспортных средств и его систем, использующих заявленный способ.
Обозначения к описанию группы изобретений:
1 - модель амортизационной стойки;
2 - шасси транспортного средства;
3 - корпус транспортного средства;
4 - логико-вычислительная подсистема;
5 - транспортное средство;
6 - передняя амортизационная стойка шасси 2;
7 - задняя амортизационная стойка шасси 2;
8 - сканер на транспортном средстве 5;
9 - пневмоаккумулятор;
10 - полости пневмоаккумулятора 9;
11 - мембраны в пневмоаккумуляторе 9;
12 - клапан с электромагнитным управлением;
13 - клапан с электромагнитным управлением;
14 - клапан с электромагнитным управлением;
15 - клапан с электромагнитным управлением;
16 - клапан с электромагнитным управлением;
17 - редукционный клапан с пропорциональным управлением;
18 - редукционный клапан с пропорциональным управлением;
19 - редукционный клапан с пропорциональным управлением;
20 - ресивер;
21 - дроссель;
22 - блок с информацией об основных параметрах транспортного средства 5 (его масса, развесовка, двигатели и т.п.);
23 - блок с информацией об аэродинамических силах и моментах, действующих на транспортное средство 5 при его движении;
24 - блок аналитических соотношений, связывающих параметры движения транспортного средства 5;
25 - блок аналитических соотношений, связывающих параметры движения транспортного средства 5;
26 - блок аналитических соотношений, связывающих параметры движения транспортного средства 5;
27 - блок-сумматор о вторых производных d2xg/dt2 параметров движения транспортного средства 5;
28 - блок-сумматор о вторых производных d2yg/dt2 параметров движения транспортного средства 5;
29 - блок-сумматор о вторых производных d2υ/dt2 параметров движения транспортного средства 5;
30 - интегрирующий блок по расчету первых производных параметров dxg/dt движения транспортного средства 5 по линейным и угловым координатам х, у, ϑ;
31 - интегрирующий блок по расчету первых производных dyg/dt параметров движения транспортного средства 5;
32 - интегрирующий блок по расчету первых производных dυ/dt угловых параметров движения транспортного средства 5;
33 - интегрирующий блок по расчету линейных координат xg транспортного средства 5;
34 - интегрирующий блок по расчету линейных координат yg транспортного средства 5;
35 - интегрирующий блок по расчету угловых координат υ транспортного средства 5;
36 - эталонная электронная модель транспортного средства 5;
v=dx/dt - скорость корпуса 3 транспортного средства;
υ - угол тангажа корпуса 3 транспортного средства;
dυ/dt - угловая скорость;
d2yg/dt2 - перегрузка в центре тяжести корпуса 3;
d2yi/dt2 - перегрузки по оси каждой амортизационной стойки;
ΔhНЕР - высота впереди расположенной неровности;
L - длина впереди расположенной неровности;
cj - коэффициент жесткости амортизационных стоек 6, 7;
kj - коэффициент демпфирования амортизационных стоек 6, 7;
ni - перегрузки различных частей транспортного средства 5, например, самолета;
vЛА - скорость движения транспортного средства 5, например, самолета;
nнорм - допустимая нормированная перегрузка для данного типа движения транспортного средства 5, например самолета;
Δt - интервалы времени сравнение перегрузок;
m - счетчик циклов;
ВПП - взлетно-посадочная полоса;
неровности типа «А» - бетонные ВПП;
неровности типа «Б» - элементарно подготовленные ВПП;
неровности типа «В» - неподготовленные ВПП;
ИМ - исполнительный механизм;
«c1» - электромагнитная катушка клапана 9;
«с2» - электромагнитная катушка клапана 10;
«a1» - сигнал управления клапаном 14;
«а2» - сигнал управления клапаном 15;
«а3» - сигнал управления клапаном 16;
«bl» - сигнал управления редукционным клапаном 17;
«b2» - сигнал управления редукционным клапаном 18;
«b3» - сигнал управления редукционным клапаном 19.
Способ пневматического нагружения фюзеляжа самолета при прочностных испытаниях на ресурс
Способ регистрации параметров условий нагружения при эксплуатации или ресурсных испытаниях механических конструкций
Способ определения температурной зависимости степени черноты (варианты)
Способ контроля обрывов изолированных термопар при теплопрочностных испытаниях конструкций и измерительная информационная система для его осуществления (варианты)
Система энергопитания рулевых приводов первичных органов управления пассажирского самолета
Способ мониторинга нагрузок и накопленной усталостной повреждаемости в условиях эксплуатации самолета
Самолет с шасси на воздушной подушке
Лопасть винта винтокрылого летательного аппарата
Способ снижения динамической нагруженности транспортного средства при движении по поверхности и транспортное средство
Лопасть несущего винта вертолёта с отклоняемой задней кромкой
Способ регистрации параметров условий нагружения при эксплуатации или ресурсных испытаниях механических конструкций
Способ определения температурной зависимости степени черноты (варианты)
Способ контроля обрывов изолированных термопар при теплопрочностных испытаниях конструкций и измерительная информационная система для его осуществления (варианты)
Система энергопитания рулевых приводов первичных органов управления пассажирского самолета
Способ мониторинга нагрузок и накопленной усталостной повреждаемости в условиях эксплуатации самолета
Самолет с шасси на воздушной подушке
Лопасть винта винтокрылого летательного аппарата
Способ снижения динамической нагруженности транспортного средства при движении по поверхности и транспортное средство
Лопасть несущего винта вертолёта с отклоняемой задней кромкой
Устройство для измерения давления и температуры

