Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству определения местоположения объекта, способу определения местоположения объекта и компьютерной программе определения местоположения объекта для определения местоположения объекта, имеющего маркеры. Изобретение относится дополнительно к устройству для навигации объекта, способу навигации объекта и компьютерной программе для навигации объекта, которые содержат, соответственно, устройство определения местоположения объекта, способ определения местоположения объекта и компьютерную программу определения местоположения объекта.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В интервенционной радиологии, рентгеноскопию можно применять для определения положения катетера внутри человека. Рентгеновский источник и рентгеновский детектор расположены таким образом, что излучение, испускаемое рентгеновским источником, может проходить через человека, в котором находится катетер, и после того, как излучение прошло через человека, излучение может регистрироваться рентгеновским детектором для формирования изображения проекции человека. Источник рентгеновского излучения и рентгеновский детектор способны поворачиваться вокруг человека для формирования нескольких изображений проекций в разных направлениях проекции. Катетер является видимым на нескольких изображениях проекций, и определяют положение катетера на соответствующем изображении проекции. Упомянутые положения катетера на разных изображениях проекций используют для вычисления трехмерного положения катетера внутри человека.
Приведенный способ определения положения катетера внутри человека требует формирования нескольких изображений проекций в разных направлениях проекций. Формирование нескольких изображений проекций прерывает последовательность выполняемых действий, например применения катетера с целью зондирования или подведения энергии, и, для каждого направления проекции, на человека следует направлять рентгеновское излучение, т.е. приведенный способ определения положения катетера внутри человека требует сообщения человеку значительной дозы излучения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание устройства определения местоположения объекта, способа определения местоположения объекта и компьютерной программы местоположения объекта, которые позволяют определять местоположение объекта с помощью сокращенного числа изображений проекций. Дополнительной целью настоящего изобретения является создание устройства для навигации объекта, способа навигации объекта и компьютерной программы для навигации объекта, которые содержат, соответственно, устройство определения местоположения объекта, способ определения местоположения объекта и компьютерную программу определения местоположения объекта.
В соответствии с первой целью настоящего изобретения предлагается устройство определения местоположения объекта для определения местоположения объекта, имеющего маркеры, при этом устройство определения местоположения объекта содержит:
- блок обеспечения изображения проекции для обеспечения изображения проекции, формируемого проецированием объекта с маркерами в плоскость проекции,
- блок распознавания изображения проекции для распознавания спроецированных маркеров и спроецированного объекта в изображении проекции,
- блок обеспечения функции объекта для обеспечения функции объекта вдоль x-z-позиций, причем функция объекта представляет объект, и x-z-позиции задаются парами из x-позиции и z-позиции, причем x-позиция является положением распознанного спроецированного маркера вдоль фиктивной линии на распознанном спроецированном объекте в плоскости проекции, и причем z-позиция задает положение в направлении, ориентированном из плоскости проекции,
- блок адаптации функции объекта для модификации функции объекта таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта были адаптированы к расстояниям между маркерами объекта, посредством изменения z-позиций,
- блок определения положения для определения положения объекта на основании адаптированной функции объекта и положений распознанных спроецированных маркеров в плоскости проекции.
Поскольку положение объекта определяют на основании адаптированной функции объекта и положений распознанных спроецированных маркеров в плоскости проекции, и поскольку функцию объекта адаптируют изменением z-позиций таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта были адаптированы к расстояниям между маркерами объекта, то данное определение положения объекта можно выполнять с использованием сокращенного числа изображений проекций. В частности, при использовании приведенного метода определения положения объекта, устройство определения местоположения объекта можно выполнить с возможностью определения данного положения с использованием всего одного изображения проекции. Следовательно, если, например, устройство определения местоположения объекта применяют для определения положения катетера внутри человека, то для определения положения катетера требуется только сокращенное число изображений проекций, в частности, всего одно изображение проекции. Это сокращает число прерываний последовательности выполняемых действий и снижает дозу излучения, подводимую к человеку.
Модификацию функции объекта таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта были адаптированы к расстояниям между маркерами объекта, посредством изменения z-позиций, предпочтительно, выполняют так, чтобы, после данной модификации, расстояния между x-z-позициями были равны расстояниям между маркерами объекта.
Предпочтительно, объект является гибким. Кроме того, объект является, предпочтительно, катетером или другим удлиненным объектом.
Предпочтительно, блок определения положения выполнен с возможностью определения трехмерного положения объекта. Кроме того, в предпочтительном варианте, блок определения положения выполнен с возможностью определения положения, ориентации и/или длины объекта на основании адаптированной функции объекта и положений распознанных спроецированных маркеров в плоскости проекции.
В предпочтительном варианте, блок адаптации функции объекта выполнен с возможностью модификации функции объекта таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта были адаптированы к расстояниям между маркерами объекта вдоль фиктивной линии, которая следует форме объекта и проходит вдоль маркеров, в частности соединяет их, посредством изменения z-позиций. Например, фиктивная линия может следовать форме и может находиться по центру внутри объекта. В одном варианте осуществления, объект является катетером, имеющим маркеры, при этом проволока расположена внутри катетера и проходит вдоль маркеров, причем данная проволока, которая может быть направляющей проволокой, может задавать фиктивную линию катетера. Предпочтительно, функция объекта является функцией, представляющей фиктивную линию, в частности представляющей проволоку внутри катетера.
Блок обеспечения изображения проекции может быть блоком проецирования для проецирования объекта с маркерами с целью формирования изображения проекции в плоскости проекции. Предпочтительно, блок проецирования является рентгеновским блоком проецирования, содержащим рентгеновский источник и рентгеновский детектор. Блок проецирования является, например, рентгеновской системой с C-образной консолью или системой компьютерной томографии. Рентгеновский источник формирует, например, расходящееся излучение, например, в виде конического пучка или параллельного излучения. Блок проецирования может быть также выполнен с возможностью использования излучения другого типа для формирования изображения проекции. Например, для формирования изображения проекции можно использовать ядерное излучение. Кроме того, блок обеспечения изображения проекции может быть также запоминающим блоком, в котором уже хранится изображение проекции, или блоком приема изображения проекции для приема изображения проекции, например, по беспроводному или проводному соединению для передачи данных.
Маркеры являются элементами, которые можно закреплять в фиксированных положениях на объекте, и которые можно обнаруживать на изображении проекции. Например, маркеры являются металлическими элементами, которые могут быть, например, обжаты вокруг объекта, который является, предпочтительно, катетером, или которые можно прикреплять к объекту другим способом, например, с использованием винтов или адгезива.
Направление, ориентированное из плоскости проекции, является направлением, которое может быть указано вектором направления, который не может целиком находиться в плоскости проекции. Следовательно, направление, ориентированное из плоскости проекции, может быть указано вектором направления, имеющим угол, не равный нулю, относительно плоскости проекции. В частности, данное направление, например, перпендикулярно к плоскости проекции или ориентировано в направлении лучевого вектора лучей, которые использовали для формирования соответствующего спроецированного маркера. Таким образом, в одном варианте осуществления, если разные маркеры спроецированы в направлениях разных лучевых векторов, например, из-за того, что для формирования изображения проекции применено расходящееся излучение, то направление из плоскости проекции может различаться для разных маркеров.
Фиктивная линия на спроецированном объекте является, предпочтительно, фиктивной линией, следующей форме спроецированного объекта в плоскости проекции и непосредственно соединяющей соседние спроецированные маркеры. Например, если спроецированный объект является спроецированным изогнутым катетером, то фиктивная линия следует кривизне спроецированного катетера. В частности, если катетер содержит проволоку, проходящую вдоль маркеров, то фиктивная линия на спроецированном катетере может представлять спроецированную проволоку катетера. Аналогично, как уже упоминалось выше, фиктивная линия объекта является, предпочтительно, фиктивной линией, следующей форме объекта и проходящей вдоль маркеров. Например, если объект является изогнутым катетером, то фиктивная линия следует кривизне катетера, в частности фиктивная линия может представлять проволоку, расположенную внутри катетера и проходящую вдоль разных маркеров.
Предпочтительно, чтобы блок обеспечения функции объекта был выполнен с возможностью обеспечения функции сплайн-линии, соединяющей соседние x-z-позиции, в качестве функции объекта. Функция сплайн-линии является, предпочтительно, функцией линии кубического сплайна, например, функцией линии естественного кубического сплайна.
Также предпочтительно, чтобы функция объекта содержала, по меньшей мере, один элемент функции объекта, формирующий функцию объекта, при этом объект содержит, по меньшей мере, два маркера, причем элемент функции объекта соединяет две соседние x-z-позиции, причем блок адаптации функции объекта сконфигурирован с возможностью адаптации функции объекта таким образом, чтобы выполнялось по меньшей мере одно из следующих условий:
- два элемента функции объекта имеют одинаковое значение в x-z-позиции, которая имеет две соседние x-z-позиции,
- первая производная двух элементов функции объекта является одинаковой в x-z-позиции, которая имеет две соседние x-z-позиции,
- вторая производная двух элементов функции объекта является одинаковой в x-z-позиции, которая имеет две соседние x-z-позиции,
- вторая производная элемента функции объекта равна нулю в x-z-позиции, которая имеет только одну соседнюю x-z-позицию. Данные условия обеспечивают адаптацию функции объекта с незначительной вычислительной нагрузкой, простым способом.
Предпочтительно, функцию объекта адаптируют так, чтобы в каждой x-z-позиции выполнялись соответствующие условия, т.е. условия для двух соседних x-z-позиций или условие только для одной соседней x-z-позиции. Предпочтительно, элемент функции объекта является элементом сплайн-линии, в частности элементом линии кубического сплайна и, более предпочтительно, элементом линии естественного кубического сплайна. Термин «соседний» означает непосредственно соседний.
Предпочтительно, устройство определения местоположения объекта дополнительно содержит блок обеспечения положения маркера для обеспечения положения маркера по меньшей мере одного из маркеров объекта, при этом блок адаптации функции объекта сконфигурирован с возможностью определения x-z-позиции, которая соответствует обеспеченному положению маркера, в зависимости от обеспеченного положения маркера и положения соответствующего распознанного спроецированного маркера в плоскости проекции, и с возможностью адаптации функции объекта таким образом, чтобы найденная x-z-позиция находилась на адаптированной функции объекта. Положение распознанного спроецированного маркера вдоль фиктивной линии в плоскости проекции задает x-позицию данного маркера. z-Позицию маркера в направлении из плоскости проекции, в частности в направлении, перпендикулярном плоскости проекции, можно использовать в качестве опорной, т.е., например, можно установить равной нулю. Однако z-позицию можно также установить равной другому значению, например, расстоянию между соответствующим маркером и плоскостью проекции в z-направлении. Также предпочтительно, чтобы объект имел максимальную возможную кривизну, при этом блок адаптации функции объекта сконфигурирован с возможностью адаптации функции объекта таким образом, чтобы ее кривизна была не больше, чем максимальная возможная кривизна объекта. Также предпочтительно, чтобы устройство определения местоположения объекта содержало блок обеспечения огибающей для обеспечения огибающей, задающей возможные позиции функции объекта, при этом блок адаптации функции объекта сконфигурирован с возможностью адаптации функции объекта таким образом, чтобы она располагалась внутри огибающей. Приведенные дополнительные условия можно применять для повышения точности определения положения и/или для определения положения с уменьшенной вычислительной нагрузкой, так как приведенными условиями исключаются некоторые положения, например, из-за того, что они не находятся внутри огибающей, или они не соответствуют максимальной возможной кривизне или положению маркера по меньшей мере одного из маркеров.
Также предпочтительно, чтобы блок определения положения был выполнен с возможностью определения положения объекта посредством
- определения двух измерений положений маркеров, как двумерных положений распознанных спроецированных маркеров в плоскости проекции,
- определения третьего измерения положений маркеров, как z-позиций x-z-позиций, которые соответствуют маркерам, вдоль адаптированной функции объекта,
- расположения адаптированной функции объекта таким образом, чтобы x-z-позиции вдоль адаптированной функции объекта совпадали с найденными трехмерными положениями маркеров. Данный подход обеспечивает быстрое определение положения, ориентации и длины объекта, и с небольшой вычислительной нагрузкой.
В соответствии с дополнительным аспектом настоящего изобретения предлагается устройство для навигации объекта, при этом устройство для навигации объекта содержит:
- объект, имеющий маркеры,
- устройство определения местоположения объекта по п.1 для определения местоположения объекта, в котором определяется положение объекта,
- блок навигации объекта для навигации объекта, в зависимости от найденного положения объекта.
Предпочтительно, объект является катетером и, следовательно, устройство для навигации объекта является, предпочтительно, устройством для навигации катетера внутри человека, например внутри сердца человека. Катетер может содержать дополнительные элементы, например датчики для зондирования внутренней области человека, например, электрические или оптические датчики и/или элементы для подведения энергии, например, элементы удаления для удаления внутренней области человека, например, с использованием электрической или оптической энергии или с использованием охлаждения или нагревания.
В соответствии с дополнительным аспектом настоящего изобретения предлагается способ определения местоположения объекта для определения местоположения объекта, имеющего маркеры, при этом способ определения местоположения объекта содержит следующие этапы:
- обеспечивают изображение проекции, формируемое проецированием объекта с маркерами в плоскость проекции,
- распознают спроецированные маркеры и спроецированный объект в изображении проекции,
- обеспечивают функцию объекта вдоль x-z-позиций, причем функция объекта представляет объект, и x-z-позиции задаются парами из x-позиции и z-позиции, причем x-позиция является положением распознанного спроецированного маркера вдоль фиктивной линии на распознанном спроецированном объекте в плоскости проекции, и, причем z-позиция задает положение в направлении, ориентированном из плоскости проекции,
- модифицируют функцию объекта таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта были адаптированы к расстояниям между маркерами объекта, посредством изменения z-позиций,
- определяют положение объекта на основании адаптированной функции объекта и положений распознанных спроецированных маркеров в плоскости проекции.
В соответствии с дополнительным аспектом настоящего изобретения предлагается способ навигации объекта, при этом способ навигации объекта содержит этапы, на которых:
- обеспечивают объект, имеющий маркеры,
- определяют местоположение объекта с использованием способа определения местоположения объекта по п.8, по которому определяют положение объекта,
- выполняют навигацию объекта в зависимости от найденного положения объекта.
В соответствии с дополнительным аспектом настоящего изобретения предлагается компьютерная программа определения местоположения объекта для определения местоположения объекта, имеющего маркеры, при этом компьютерная программа определения местоположения объекта содержит средство программного кода, чтобы заставлять компьютер выполнять этапы способа определения местоположения объекта по п.10, когда компьютерная программа исполняется в компьютере, управляющем устройством определения местоположения объекта по п.1.
В соответствии с дополнительным аспектом настоящего изобретения предлагается компьютерная программа для навигации объекта, при этом компьютерная программа для навигации объекта содержит средство программного кода, чтобы заставлять компьютер выполнять этапы способа навигации объекта по п.11, когда компьютерная программа исполняется в компьютере, управляющем устройством для навигации объекта по п.9.
Следует понимать, что устройство определения местоположения объекта по п.1, устройство для навигации объекта по п.9, способ определения местоположения объекта по п.10, способ навигации объекта по п.11, компьютерная программа определения местоположения объекта по п.12 и компьютерная программа для навигации объекта по п.13 имеют сходные и/или идентичные предпочтительные варианты осуществления, в частности, описанные в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может быть также любым сочетанием зависимых пунктов формулы изобретения и соответствующим независимым пунктом формулы изобретения.
Приведенные и другие аспекты изобретения будут очевидны из пояснений со ссылкой на описанные в дальнейшем варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На нижеследующих чертежах:
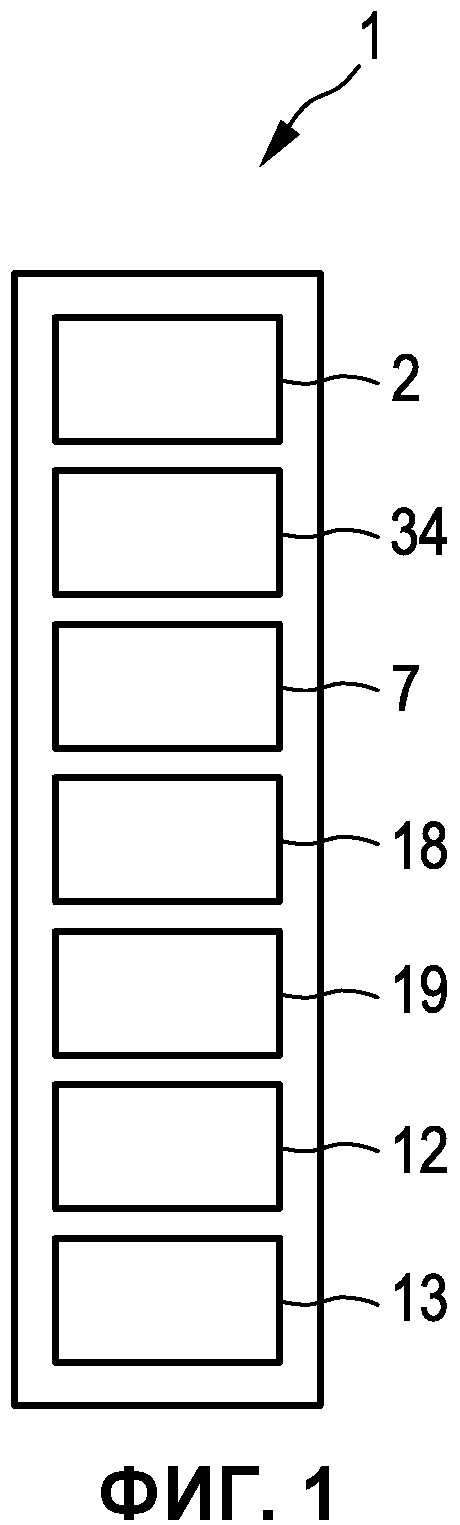
Фиг.1 - схематичное примерное изображение варианта осуществления устройства определения местоположения объекта,
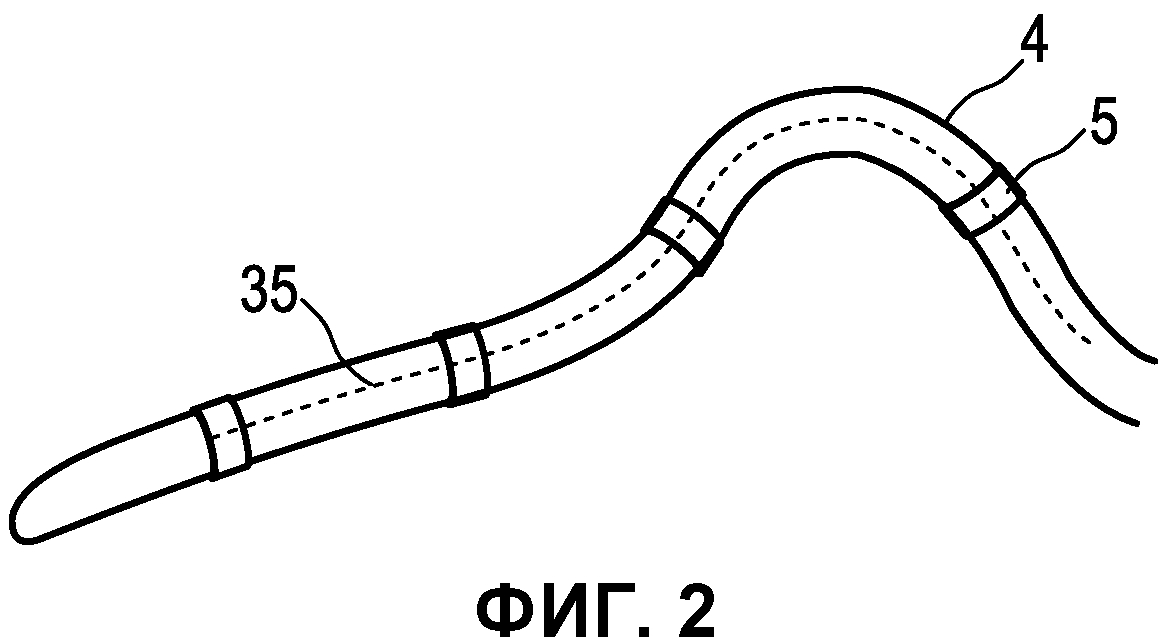
Фиг.2 - схематичное примерное изображение дистального конца катетера, содержащего маркеры,
Фиг.3 - примерная схема, поясняющая формирование изображения проекции,
Фиг.4 - схематичное примерное изображение функции объекта, представляющей объект,
Фиг.5 - схематичное примерное изображение варианта осуществления устройства для навигации объекта,
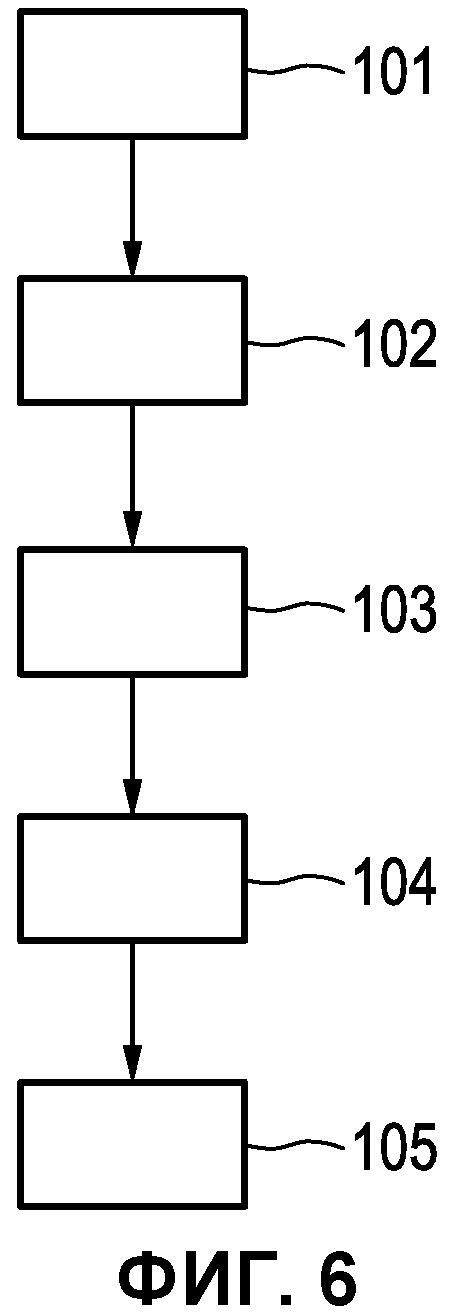
Фиг.6 - примерная блок-схема последовательности операций, поясняющая вариант осуществления способа определения местоположения объекта, и
Фиг.7 - примерная блок-схема последовательности операций, поясняющая вариант осуществления способа навигации объекта.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 приведено схематичное примерное изображение устройства 1 определения местоположения объекта для определения местоположения объекта, имеющего маркеры. В данном варианте осуществления, объект является гибким катетером 4, имеющим маркеры 5. Дистальный конец данного катетера 4 схематично и примерно показан на фиг.2. Предпочтительно, маркеры расположены с равными промежутками вдоль фиктивной линии 35 на катетере 4, соединяющем маркеры 5. В другом варианте осуществления, маркеры могут быть расположены на катетере неравномерно. Маркеры 5 закреплены в фиксированных положениях на катетере 4 и являются обнаружимыми на изображении проекции. В частности, маркеры 5 являются металлическими элементами, которые, например, могут быть закреплены вокруг катетера 4, или которые могут быть, например, прикреплены к катетеру другим способом, например, с помощью винтов или адгезива (клея). Фиктивная линия 35 на катетере 4 следует кривизне катетера 4 и может быть задана проволокой, расположенной внутри катетера 4 и проходящей вдоль маркеров 5. Например, проволока может быть направляющей проволокой.
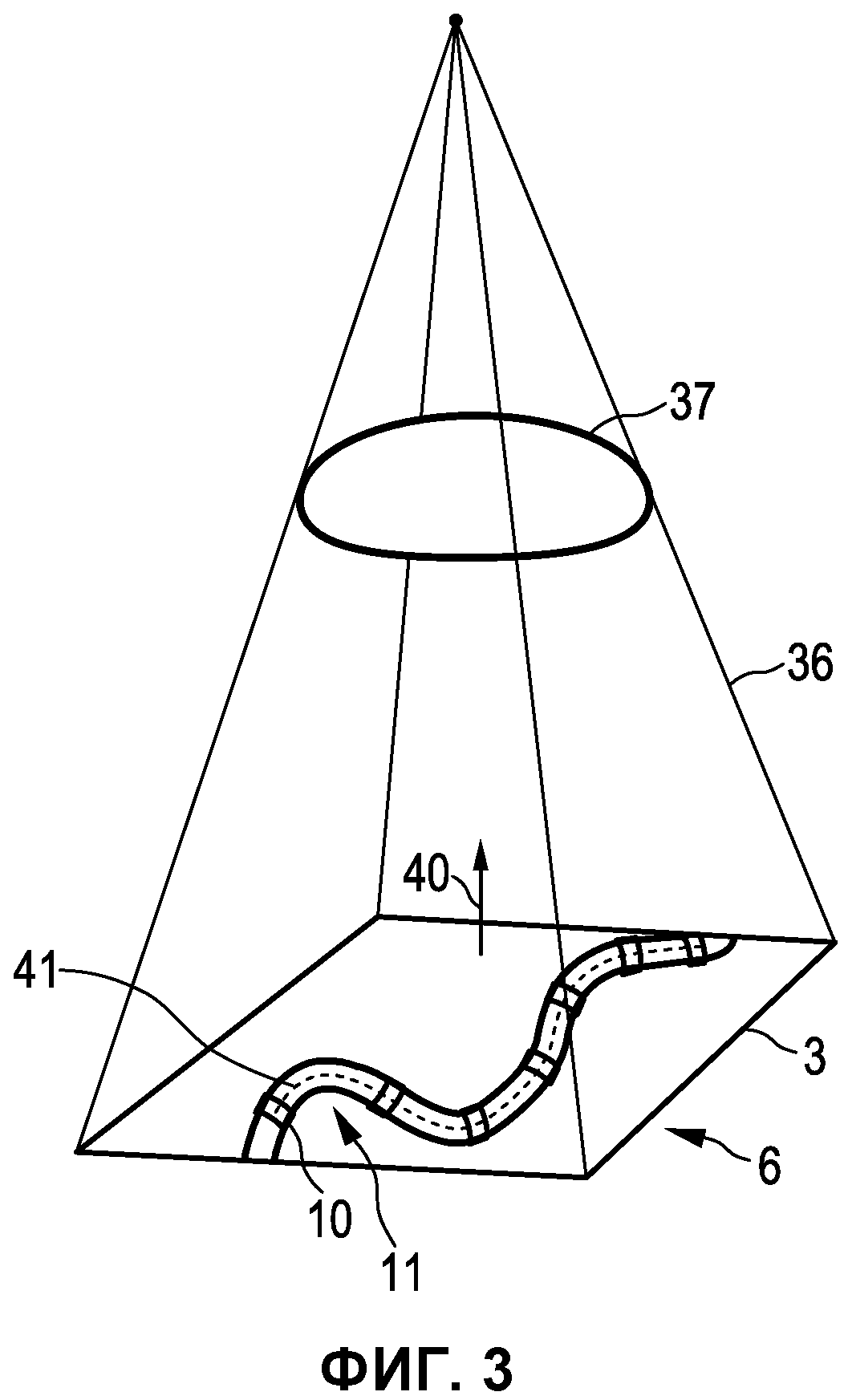
Устройство 1 определения местоположения объекта содержит блок 2 обеспечения изображения проекции для обеспечения изображения проекции, формируемого проецированием катетера 4 с маркерами 5 в плоскость проекции. Формирование изображения проекции схематично и примерно показано на фиг.3. Источник излучения формирует, например, конический пучок 36 для прохождения через орган 37 человека или другой объект обследования, в котором находится катетер 4 (не показанный на фиг.3). Конический пучок, который прошел через орган 37, регистрируется детектором излучения в плоскости 6 проекции для формирования изображения 3 проекции, представляющего спроецированные маркеры 10 и спроецированный катетер 11. Блок 2 обеспечения изображения проекции может быть запоминающим блоком, в котором уже хранится изображение 3 проекции, или блоком приема изображения проекции для приема изображения 3 проекции, например, по беспроводному или проводному соединению для передачи данных из блока проецирования типа рентгеновской системы с C-образной консолью или системы компьютерной томографии. Однако блок 2 обеспечения изображения проекции может быть также, сам по себе, блоком проецирования, т.е. блок 2 обеспечения изображения проекции может быть также, например, рентгеновской системой с C-образной консолью или системой компьютерной томографии. Примерное дополнительное описание упомянутого блока проецирования приведено далее со ссылкой на фиг.5.
Устройство 1 определения местоположения объекта дополнительно содержит блок 35 распознавания изображения проекции для распознавания спроецированных маркеров 10 и спроецированного объекта 11 в изображении 3 проекции и, следовательно, в плоскости 6 проекции. Блок 35 распознавания изображения проекции может быть выполнен с возможностью распознавания только части спроецированного объекта 11. Например, если спроецированный объект является спроецированным катетером 11, содержащим проволоку, проходящую вдоль спроецированных маркеров, блок 35 распознавания изображения проекции может быть выполнен с возможностью распознавания спроецированной проволоки в изображении проекции.
Предпочтительно, спроецированные маркеры 10 и спроецированный объект 11 распознают их сегментацией в изображении проекции, например, с использованием способа пороговой обработки. Способы распознавания спроецированных маркеров и спроецированных объектов в изображении проекции общеизвестны и описаны, например, в работах «3D Reconstruction of Coronary Stents in Vivo Based on Motion Compensated X-Ray Angiograms», Babak Movassaghi, MICCAI 2006, LNCS 4191, pages 177-184 (2006); и «Scale-Space Signatures for the Detection of Clustered Microcalcifications in Digital Mammograms», T. Netsch and H. O. Peitgen, IEEE Trans. Med. Imag., vol. 18, no. 9, pages 774 to 786 (1999), которые включены в настоящее описание посредством ссылки.
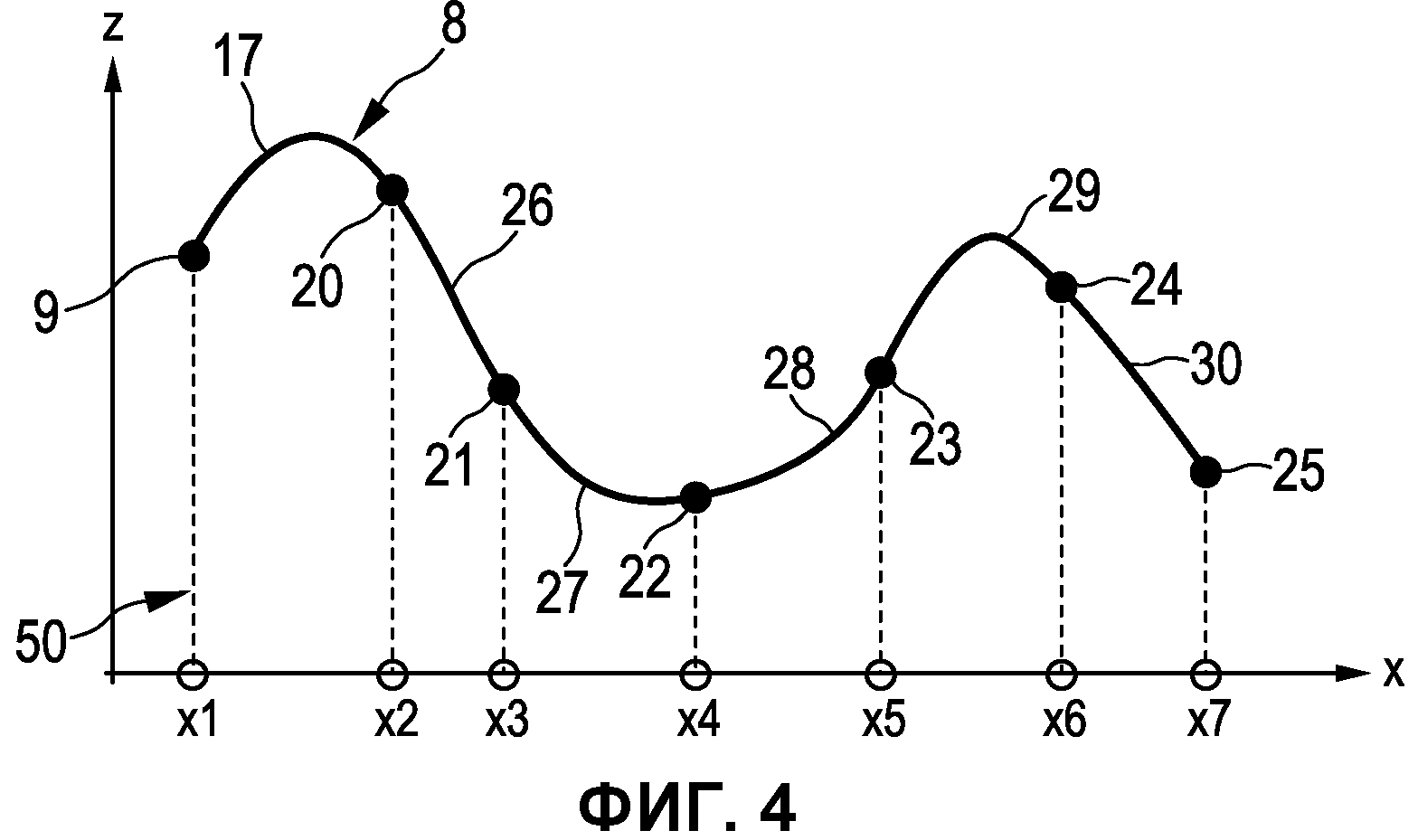
Устройство 1 определения местоположения объекта дополнительно содержит блок 7 обеспечения функции объекта для обеспечения функции объекта, представляющей катетер 4. В данном варианте осуществления функция 8 объекта, пример которой схематично показан на фиг.4, является функцией сплайн-линии, соединяющей соседние x-z-позиции 9, 20, 21, 22, 23, 24. Сплайн-функция 8 содержит несколько элементов 17, 26, 27, 28, 29, 30 сплайн-линии, формирующих функцию 8 объекта. Элементы сплайн-линии являются, предпочтительно, элементами линии кубического сплайна и, также, предпочтительно, элементами линии естественного кубического сплайна. Каждый элемент линии сплайна соединяет две соседние x-z-позиции. Следовательно, функция 8 объекта зависит от x-z-позиций.
x-z-Позиция задается парой из x-позиции и z-позиции, где x-позиция является положением распознанного спроецированного маркера 10 вдоль фиктивной линии 41 на распознанном спроецированном объекте 11 в плоскости 6 проекции. На фиг.4, x-позиции указаны, для примера, как x1, …, x7. z-Позиция задает позицию в направлении 40, ориентированном из плоскости 6 проекции. Фиктивная линия 41 спроецированного катетера 11 следует форме спроецированного катетера 11 в плоскости 6 проекции и непосредственно соединяет соседние спроецированные маркеры. Спроецированный катетер имеет змеевидную форму, и фиктивная линия 41 продолжается, предпочтительно, по центру змеевидной формы спроецированного катетера 11. Однако фиктивная линия 41 может также следовать по другой траектории на змеевидной форме спроецированного катетера 11. Если катетер содержит проволоку, проходящую вдоль маркеров, и если данную проволоку можно распознать на изображении проекции, то фиктивная линия 41, предпочтительно, следует вдоль спроецированной проволоки в плоскости проекции, и функция объекта представляет, предпочтительно, данную проволоку внутри катетера.
Направление 40 из плоскости 6 проекции, в данном варианте осуществления, перпендикулярно плоскости 6 проекции и указывает в направлении источника излучения, формирующего конический пучок 36. Однако в другом варианте осуществления направление из плоскости проекции может быть также указано вектором направления, имеющим угол, не равный нулю, относительно плоскости 6 проекции и не перпендикулярным к плоскости 6 проекции. Например, вектор направления может быть ориентирован в направлении лучевого вектора луча, который был использован для формирования соответствующего спроецированного маркера 10. Поскольку разные маркеры проецируются разными лучами, которые имеют разную ориентацию, то, в данном случае, направление из плоскости 6 проекции может быть разным для разных спроецированных маркеров 10.
Устройство 1 определения местоположения объекта дополнительно содержит блок 12 адаптации функции объекта для модификации функции 8 объекта. Блок 12 адаптации функции объекта сконфигурирован, предпочтительно, с возможностью адаптации функции 8 объекта таким образом, чтобы выполнялись следующие условия: два соответствующих элемента сплайн-линии в x-z-позициях 20, 21, 22, 23, 24, каждая из которых имеет две соседние x-z-позиции, имеют одинаковое значение, одинаковую первую производную и одинаковую вторую производную, и вторая производная соответствующего элемента сплайн-линии равна нулю в x-z-позициях 9, 25, которые имеют только одну соседнюю x-z-позицию.
Устройство 1 определения местоположения объекта дополнительно содержит блок 18 обеспечения положения маркера для обеспечения положения маркера по меньшей мере одного из маркеров 5 на катетере 4. Блок 18 обеспечения положения маркера является, например, запоминающим блоком, в котором хранится положение маркера, которое уже определено, или принимающим блоком для приема уже найденного положения маркера, например, посредством проводной или беспроводной передачи данных. Без потери общности, положение маркера можно получить посредством совмещенной трехмерной модели поверхности левого предсердия с отмеченным положением транссептального прокола, поддержанного исполнением поворотной атриографии, если катетер 4 расположен внутри сердца человека. Катетер может быть устроен так, чтобы маркер 5 располагался в месте, в котором катетер вошел в левое предсердие, при этом упомянутое место известно из зарегистрированной трехмерной модели поверхности левого предсердия. В общем, если в объект обследования, например орган человека, вводят катетер, и если сформирована модель объекта обследования с известным положением, и если известно положение по меньшей мере одного маркера относительно модели, то данное известное положение маркера может быть обеспечено блоком обеспечения положения маркера.
Так как положение по меньшей мере одного маркера 5 известно, и так как известно также положение спроецированного маркера 10 в плоскости 6 проекции, то можно определить x-z-позицию, которая соответствует данному маркеру, при этом функцию объекта адаптируют так, чтобы данная найденная x-z-позиция, которая соответствует обеспеченному положению маркера по меньшей мере одного маркера, находилась на адаптированной функции объекта.
Блок 12 адаптации функции объекта сконфигурирован с возможностью модификации функции 8 объекта таким образом, чтобы расстояния между x-z-позициями 9, 20, …, 25 вдоль функции 8 объекта, соединяющей x-z-позиции 9, 20, …, 25, были адаптированы к расстояниям между маркерами 5 на катетере 4 вдоль фиктивной линии 35 на катетере 4, соединяющей маркеры 5, посредством изменения z-позиций. Таким образом, x-z-позиции 9, 20, …, 25 перемещаются вдоль штриховых вертикальных линий 50, показанных на фиг.4, таким образом, чтобы расстояния между x-z-позициями 9, 20, …, 25 были равны расстояниям между маркерами 5 на катетере 4, и вышеупомянутые условия выполнялись.
Определение функции объекта поясняется ниже, в качестве примера, для случая, в котором катетер 4 содержит четыре маркера 5, которые распознаваемы в изображении проекции.
В настоящем примере функция объекта состоит из трех элементов линии сплайна, соединяющих четыре x-z-позиции, которые соответствуют четырем маркерам. Элемент линии сплайна можно задать следующим уравнением
 , (1)
, (1)
где индекс j обозначает соответствующий элемент сплайн-линии, x j обозначает соответствующую x-позицию соответствующего спроецированного маркера, и a j, b j, c j, d j являются параметрами, задающими j-тый элемент сплайн-линии. Каждый элемент сплайна начинается в первой x-позиции и заканчивается во второй x-позиции, при этом первая x-позиция меньше, чем вторая x-позиция. Для элемента линии сплайна, обозначенного индексом j, x j, предпочтительно, означает соответствующую первую x-позицию. Для определения функции объекта, в настоящем примере следует определить трижды четыре параметра, т.е. двенадцать параметров, с четырьмя маркерами и тремя элементами сплайн-линии. Так как, в соответствии с вышеупомянутыми условиями, в двух внутренних x-z-позициях соответствующие два элемента линии сплайна должны иметь одинаковое значение, одинаковую первую производную и одинаковую вторую производную, упомянутые условия дают шесть уравнений. Кроме того, так как в двух внешних x-z-позициях вторая производная должна быть нулевой, то получают еще два уравнения. Так как три расстояния вдоль функции объекта между четырьмя x-z-позициями должны быть равны расстояниям между маркерами 5 вдоль фиктивной линии 35 на катетере 4, то получают еще три уравнения, и двенадцатое уравнение получают при использовании условия, что x-z-позиция, заданная обеспеченным положением маркера, должна находиться на адаптированной функции объекта. Следовательно, в данном варианте осуществления, вышеупомянутые условия обеспечивают двенадцать уравнений, которые можно использовать для определения двенадцати параметров трех элементов сплайн-линии, задающих функцию объекта.
Для определения функции 8 объекта можно ввести дополнительные граничные условия, чтобы ограничить решение. Для примера, заданным физическим условием может быть максимальная кривизна катетера 4, при этом блок 12 адаптации функции объекта может быть сконфигурирован с возможностью адаптации функции 8 объекта таким образом, чтобы ее кривизна была не больше, чем максимальная возможная кривизна катетера 4. Кроме того, устройство 1 определения местоположения объекта может дополнительно содержать блок 19 обеспечения огибающей для обеспечения огибающей, задающей возможные позиции функции объекта, при этом блок 12 адаптации функции объекта может быть сконфигурирован с возможностью адаптации функции 8 объекта таким образом, чтобы она находилась внутри огибающей. Например, если катетер 4 находится в сердце, то форма предсердия, которая определена заранее посредством исполнения поворотной атриографии, может задавать огибающую. Кроме того, или в качестве альтернативы, спроецированный размер катетера 4 и маркеров 5 на изображении проекции также может служить граничным условием для системы уравнений, т.е. с учетом известной геометрии проекции и размеров спроецированного катетера и спроецированных маркеров можно задать трехмерную область, в которой и только в которой может находиться катетер. Данная трехмерная область ограничивает пространство возможных x-z-позиций.
Устройство 1 определения местоположения объекта дополнительно содержит блок 13 определения положения для определения трехмерного положения катетера 4 на основании адаптированной функции 8 объекта и положений распознанных спроецированных маркеров 10 в плоскости 6 проекции. Блок 13 определения положения, предпочтительно, выполнен с возможностью определения не только положения катетера 4, но также ориентации и длины катетера 4 на основании адаптированной функции 8 объекта и положений распознанных спроецированных маркеров 10 в плоскости 6 проекции. Для определения положения, ориентации и длины катетера 4 в трех измерениях определяют трехмерные положения маркеров 5. Два измерения маркера 5 определяются как положение соответствующего спроецированного маркера 10 в плоскости 6 проекции, и третье измерение является z-позицией адаптированной функции 8 объекта в x-позиции, которая соответствует соответствующему маркеру. Упомянутые найденные трехмерные положения маркеров 5 согласуются с соответствующими x-z-позициями функции 8 объекта таким образом, что адаптированная функция 8 объекта может располагаться в трехмерном пространстве так, что найденные трехмерные положения маркеров находятся на адаптированной функции 8 объекта, при этом расположенная адаптированная функция 8 объекта представляет собой найденные положение, ориентацию и длину катетера 4.
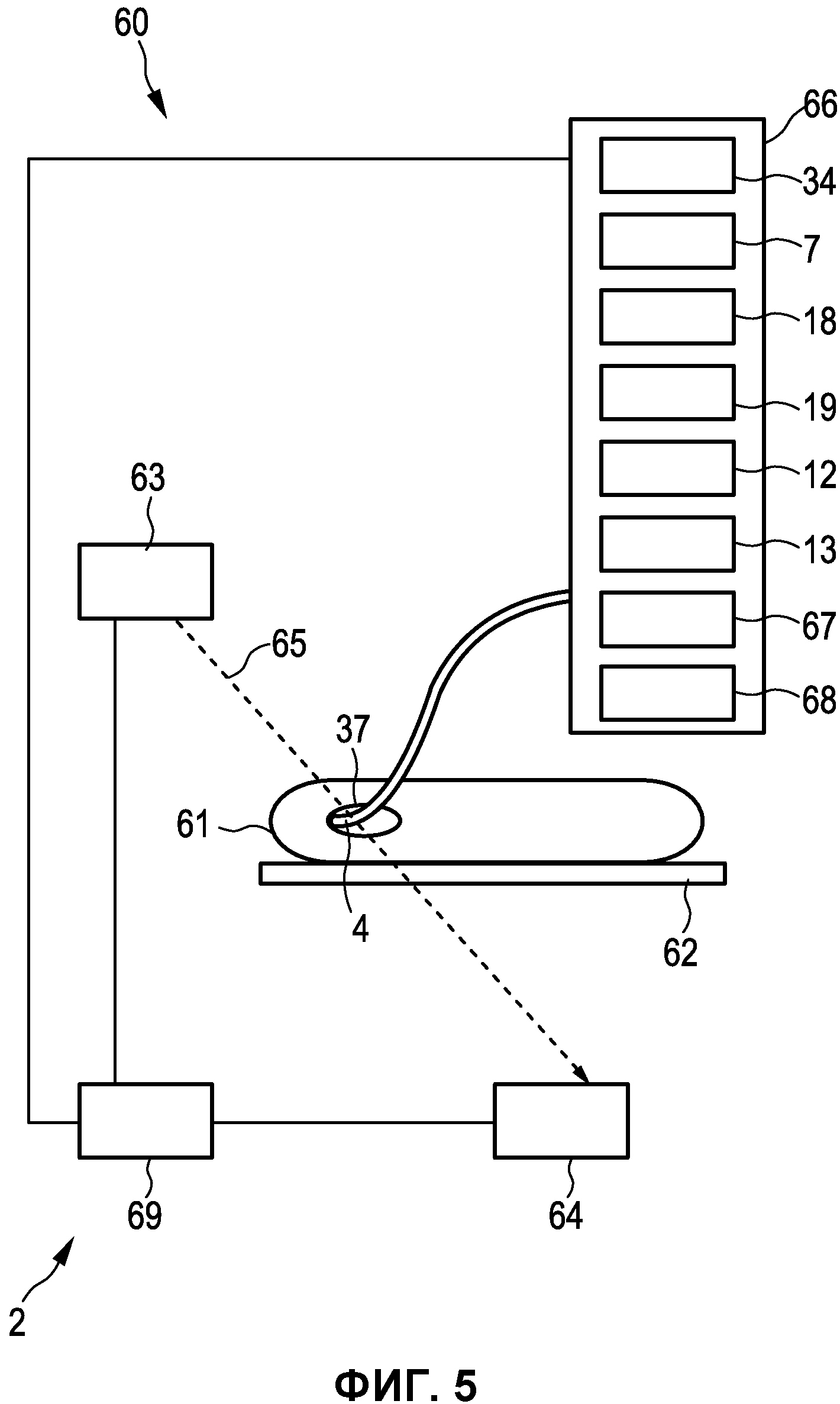
На фиг.5 приведено схематичное примерное изображение устройства 60 для навигации объекта, содержащего объект, представляющий собой катетер 4 с маркерами 5. Катетер 4 вводят в орган 37, например сердце человека 61, который находится на столе 62 для объекта обследования. Устройство 60 для навигации объекта содержит вышеописанное устройство определения местоположения объекта для определения местоположения катетера 4, в частности, для определения положения и, необязательно, ориентации и длины катетера 4. Вышеуказанное означает, что устройство 60 для навигации объекта содержит блок 34 распознавания изображения проекции, блок 7 обеспечения функции объекта, необязательно, блок 18 обеспечения положения маркера, необязательно, блок 19 обеспечения огибающей, блок 12 адаптации функции объекта и блок 13 определения положения. Устройство 60 для навигации объекта содержит также блок 2 обеспечения изображения проекции, который является, в данном варианте осуществления, блоком рентгеновских проекций, содержащим рентгеновский источник 63 и рентгеновский детектор 64. Блок 2 рентгеновских проекций является, предпочтительно, рентгеновской системой с C-образной консолью или системой компьютерной томографии. Рентгеновский источник 63 формирует излучение 65, являющееся, например, расходящимся излучением, например, коническим пучком или параллельным излучением, при этом излучение 65 регистрируется рентгеновским детектором 64 после прохождения через человека 61. Блок обеспечения изображения проекции может быть также блоком проецирования другого типа, который использует, например, ядерное излучение для формирования изображения проекции. Рентгеновский источник 63 и рентгеновский детектор 64 работают, предпочтительно, под управлением блока 69 управления блоком проецирования.
Блок 34 распознавания изображения проекции, блок 7 обеспечения функции объекта, блок 18 обеспечения положений маркеров, блок 19 обеспечения огибающей, блок 12 адаптации функции объекта и блок 13 определения положения входят в состав блока 66 управления катетером. Блок 66 управления катетером дополнительно содержит блок 67 навигации катетера для навигации катетера 4 внутри органа 37 человека 61, в зависимости от найденного положения и, предпочтительно, также в зависимости от найденных ориентации и длины катетера 4.
В предпочтительном варианте, блок 67 навигации катетера выполнен с возможностью навигации катетера 4, в частности дистального конца катетера 4, в искомое местоположение внутри органа 37 человека 61, в зависимости от найденного положения и, предпочтительно, также в зависимости от найденных положения и, необязательно, ориентации и длины катетера 4. Блок 61 навигации может быть выполнен с возможностью осуществления пользователем навигации катетера 4 полностью в ручном режиме или полу- или полностью автоматически, в зависимости от найденных положения и, предпочтительно, ориентации и длины катетера 4. В предпочтительном варианте, катетер 4 содержит встроенное направляющее средство, которое может действовать под управлением блока 61 навигации катетера. Катетер 4 можно, например, направлять и проводить с использованием направляющих проволок для проводки, например, дистального конца катетера 4 в искомое местоположение внутри органа 37. Однако, блок навигации катетера и катетер могут быть также выполнены с возможностью навигации с использованием магнитных сил, т.е. блок навигации катетера и катетер могут быть выполнены с возможностью магнитной навигации.
В предпочтительном варианте, катетер 4 содержит дополнительные элементы для зондирования органа 37 и/или для подведения энергии к органу 37. Блок 31 управления катетером может содержать соответствующий блок 68 зондирования и/или подведения энергии для управления зондированием и/или подведением энергии к органу 37. Элементы зондирования и/или подведения энергии внутри катетера 4 и соответствующий блок 68 зондирования и/или подведения энергии могут быть выполнены с возможностью, например, оптического или электрического зондирования внутренней области органа 37. Для зондирования внутренней области органа 37 можно также применять ультразвук. Упомянутые элементы и блок можно также использовать для подведения, например, электрической или оптической энергии во внутреннюю область органа 37, например, для абляции.
Ниже приведено, для примера, описание способа определения местоположения объекта, со ссылкой на блок-схему последовательности операций, приведенную на фиг.6.
На этапе 101, блоком 2 обеспечения изображения проекции обеспечивается изображение 3 проекции, формируемое посредством проецирования катетера 4 с маркерами 5 в плоскости 6 проекции. На этапе 102, спроецированные маркеры 10 и спроецированный объект 11 распознаются в изображении 3 проекции блоком 34 распознавания изображения проекции. На этапе 103 обеспечивается функция 8 объекта, представляющая катетер 4, при этом функция 8 объекта зависит от x-z-позиций 9, 20, …, 25, заданных парами из x-позиции и z-позиции, причем x-позиция является положением распознанного спроецированного маркера 10 вдоль фиктивной линии 41 на распознанном спроецированном катетере 11 в плоскости 6 проекции, и, причем z-позиция задает положение в направлении 40, ориентированном из плоскости 6 проекции. На этапе 104, функцию 8 объекта модифицируют так, чтобы расстояния между x-z-позициями 9, 20, …, 25 вдоль функции 8 объекта, соединяющей x-z-позиции 9, 20, …, 25, были адаптированы к расстояниям между маркерами 5 на катетере 4 вдоль фиктивной линии 35 на катетере 4, соединяющей маркеры 5, посредством изменения z-позиций, и, на этапе 105 определяют положение и, предпочтительно, ориентацию и длину катетера на основании адаптированной функции 8 объекта и положений распознанных спроецированных маркеров 10 в плоскости 6 проекции.
Ниже приведено, для примера, описание варианта осуществления способа навигации объекта, со ссылкой на блок-схему последовательности операций, приведенную на фиг.7.
На этапе 201 обеспечивают катетер 4, содержащий маркеры 5, например, внутри органа 37 человека 61. На этапе 202 определяют местоположение катетера 4 с использованием способа определения местоположения катетера, описанного выше со ссылкой на фиг.6, при этом определяют положение и, предпочтительно, также ориентацию и длину катетера 4, и на этапе 203 выполняют навигацию катетера 4 в зависимости от найденных положения и, предпочтительно, ориентации и длины катетера 4. Этапы 202 и 203 могут выполняться в цикле или одновременно, при этом фактически найденные положение и, предпочтительно, ориентация и трасса катетера 4 используются для навигации катетера 4, предпочтительно, в искомое положение.
Устройство определения местоположения объекта может содержать дополнительные элементы для определения положения катетера, например, электромагнитные следящие устройства, которые можно сочетать с определением положения с использованием вышеописанной функции объекта, для повышения точности определения положения, в частности трехмерного положения, объекта.
Устройство определения местоположения объекта может предназначаться для минимально инвазивных вмешательств, выполняемых под рентгеновским контролем, которые, обычно, требуют возможностей точного определения трехмерного/четырехмерного местоположения. Предпочтительно, устройство определения местоположения объекта использует всего одно изображение проекции, на котором можно распознать маркеры объекта для определения трехмерного местоположения объекта. Предпочтительно, устройство определения местоположения объекта выполнено с возможностью осуществления определения местоположения в реальном времени. В одном варианте осуществления, единственная проекция трехмерного катетера формирует двумерную копию, т.е. изображение проекции, на плоскопанельном детекторе. С использованием копии, измеряют дугообразные линии от спроецированного маркера к спроецированному маркеру вдоль спроецированного катетера, что дает x-позиции спроецированных маркеров. Для данных спроецированных маркеров можно считать, что z-позиции являются нулевыми. В таком случае, катетер можно рассматривать как представление нескольких естественных кубических сплайнов, соединенных в точках маркеров в двумерной плоскости и формирующих функцию объекта в данной двумерной плоскости. Двумерная плоскость задана x- и z-позициями. Кубические сплайны являются непрерывными и различными. Первая и вторая производные двух сплайнов должны быть равными в каждой точке соединения. Данное условие приводит к многочисленным уравнениям. Если, например, рассматривают четыре маркерных точки, то, как изложено выше, предпочтительно, вычисляют двенадцать коэффициентов трех кубических сплайнов.
Вышеописанные устройство определения местоположения объекта и устройство для навигации объекта, предпочтительно, допускают определение местоположения катетера и низкодозовое слежение за катетером. Возможными модификациями являются, например, увязка системы уравнений по нескольким измерениям положения катетера, чтобы обеспечить более устойчивое решение или сформировать трехмерную модель ограничивающей поверхности по самой рентгеновской проекции.
Предпочтительно, фиктивная линия объекта является линией, проходящей вдоль, в частности, соединяющей соседние маркеры объекта, при этом линия следует форме объекта. Данная фиктивная линия проходит, предпочтительно, по центрам соседних маркеров. Фиктивная линия объекта может находиться на поверхности объекта, в частности, на внешней поверхности, или фиктивная линия объекта может находиться внутри, в частности, по центру внутри объекта. В предпочтительном варианте, фиктивная линия на спроецированном объекте находится внутри спроецированного объекта, в частности, по центру внутри спроецированного объекта. Если объект является катетером, содержащим проволоку, проходящую вдоль маркеров, то предпочтительно, функция объекта представляет данную проволоку, фиктивная линия объекта представляет также данную проволоку, и фиктивная линия спроецированного катетера представляет спроецированную проволоку.
Хотя, в вышеописанных вариантах осуществления описан катетер, имеющий некоторое число маркеров, в других вариантах осуществления, катетер может также содержать другое число маркеров. Кроме того, форма маркеров может быть разной, и устройство определения местоположения объекта может быть выполнено с возможностью определения местоположения объекта другого типа, не являющегося катетером. Например, объект может быть гибкой интервенционной иглой или минимально инвазивным устройством визуализации типа датчика для внутрисердечной эхокардиографии.
Хотя, в вышеописанных вариантах осуществления, местоположение катетера определяется, предпочтительно, внутри органа человека, устройство определения местоположения может быть выполнено с возможностью определения местоположения катетера или другого объекта внутри другого элемента, например внутри другой части человека, например внутри сосудов, или внутри технического объекта типа трубопровода или другого пустотелого технического элемента.
Хотя, в вышеописанных вариантах осуществления, функция объекта является функцией сплайн-линии, содержащей несколько элементов сплайн-линии, в других вариантах осуществления, функция объекта может быть также другой функцией, представляющей объект. Например, для представления объекта можно применить полином.
В процессе практического осуществления заявленного изобретения, специалистами в данной области техники, на основе изучения чертежей, описания и прилагаемой формулы изобретения, могут быть разработаны и исполнены другие модификации вышеописанных вариантов осуществления.
В формуле изобретения, выражение «содержащий» не исключает других элементов или этапов, и признак единственного числа не исключает множественного числа.
Один блок или одно устройство может выполнять функции нескольких объектов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки перечислены во взаимно отличающихся зависимых пунктах формулы изобретения, не означает, что, в подходящем случае, нельзя воспользоваться сочетанием упомянутых признаков.
Обеспечение, адаптация и определение, например, обеспечение функции объекта, адаптация функции объекта и определение положения объекта, выполняемые одним или несколькими блоками или устройствами, могут быть выполнены любым другим числом блоков или устройств. Например, этапы 102-105 могут выполняться одним блоком или любым другим числом разных блоков. Обеспечение, адаптация и определение и/или управление устройством определения местоположения объекта, в зависимости от способа определения местоположения объекта, и/или управление устройством для навигации объекта в соответствии со способом навигации объекта, могут быть реализованы в виде средства программного кода компьютерной программы и/или специализированного аппаратного программного обеспечения.
Компьютерную программу можно хранить/распространять на подходящем носителе информации, например, оптическом запоминающем устройстве или твердотельном носителе информации, поставляемом вместе или в составе другого аппаратного программного обеспечения, но можно также распространять в других формах, например, по сети Интернет или посредством других проводных или беспроводных телекоммуникационных систем.
Никакие позиционные обозначения в формуле изобретения не подлежат интерпретации в смысле ограничения объема изобретения.
Изобретение относится к устройству определения местоположения объекта для определения местоположения объекта, имеющего маркеры, по изображению проекции. Функция объекта обеспечивается вдоль x-z-позиций, при этом x-z-позиции задаются парами из x-позиции, являющейся положением распознанного спроецированного маркера вдоль фиктивной линии на распознанном спроецированном объекте в плоскости проекции, и z-позиции, задающей положение в направлении, ориентированном из плоскости проекции. Положение определяют на основании функции объекта, которая модифицируется изменением z-позиций таким образом, чтобы расстояния между x-z-позициями вдоль функции объекта, соединяющей x-z-позиции, были адаптированы к расстояниям между маркерами объекта. Данный подход позволяет устройству определения местоположения объекта определять положение с использованием сокращенного числа изображений проекций, в частности с помощью только одного изображения проекции.
Трехмерная реконструкция тела и контура тела
Юстировка расстояния от решетки источника до фазовой решетки для фазовой настройки в несколько порядков при дифференциальной фазово-контрастной визуализации
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

