Результат интеллектуальной деятельности: СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к космической технике и предназначено для обеспечения стабилизации ракетных разгонных блоков и космических аппаратов (КА).
Известны системы стабилизации КА, использующие в качестве исполнительных органов системы стабилизации электродвигатели-маховики, которые располагаются по осям стабилизации и вырабатывают управляющие динамические моменты, величина которых регулируется, например, пропорционально сигналу управления (патент SU 1839975, приоритет от 26.02.1979). Указанные системы нашли широкое применение в космической технике, но их использование связано с ограничениями по максимуму величины восстанавливающего момента, что определяется предельной скоростью вращения маховиков, поэтому при больших возмущениях реакция системы стабилизации может оказаться недостаточной. Это ограничивает применение подобных систем при стабилизации ракетных разгонных блоков.
Известны системы стабилизации КА, использующие в качестве исполнительных органов системы стабилизации маломощные реактивные двигатели, у которых рабочим телом могут служить обычные продукты сгорания химического топлива или какой-либо газ (С.И. Королев, Н.К. Матвеев. Космические аппараты серии Зенит: Уч. пособие / Балт гос. техн. ун-т, СПб., 2005). Величина создаваемого восстанавливающего момента зависит от скорости истечения и массового расхода рабочего тела, а также от размера плеча, на котором приложена сила тяги двигателя.
Такие системы могут создавать большие величины восстанавливающих моментов и быстро реагировать на возмущающие воздействия, но необходимость использования невосстанавливаемого запаса рабочего тела ограничивает их время применения. При этом возможный размер плеча, на котором приложена сила тяги двигателя, во многом определяются выбранной компоновкой КА. Так, например, для стабилизации малых и средних ракетных разгонных блоков (РБ), компоновка которых включает кольцеобразный блок баков с диаметрально противоположным расположением относительно продольной оси блока двух сферических баков окислителя, двух сферических баков горючего и двух сферических приборных отсеков, используют двухкомпонентный ракетный двигатель, установленный во внутреннем проеме блока баков вдоль продольной оси (патент RU 2043956, приоритет от 23.11.1993). Указанная компоновка использована в конструкции ракетного разгонного блока «Фрегат». Особенностью КА, имеющих подобную компоновку, является то, что плечо управляющего момента мало из-за близости точки опоры ракетного двигателя к центру масс КА. При этом кроме возмущения в виде момента возмущение в виде силы также имеет значительную величину. Применение поворотного ракетного двигателя, установленного в кардановом подвесе, при малом плече управления, определяемом расстоянием между центром тяжести КА и точкой приложения силы от двигателя, для получения управляющего момента с целью парирования возмущения, требует значительных углов и угловых скоростей поворота камеры сгорания двигателя. Это неизбежно вызывает большую составляющую боковой (поперечной) возмущающей силы. Указанные недостатки частично устраняются при установке ракетного двигателя в подвесе с возможностью осуществления плоскопараллельного перемещения подвеса с двигателем в плоскости, перпендикулярной продольной оси КА. Перемещение подвеса осуществляется с помощью рулевых машинок. Система стабилизации для КА, содержащего двигательную установку со сферическими баками окислителя и горючего, симметрично расположенными относительно продольной оси КА, и ракетный двигатель, установленный в подвесе вблизи центра масса КА с возможностью осуществления плоскопараллельного перемещения подвеса с двигателем в плоскости, перпендикулярной продольной оси КА, является наиболее близким аналогом к заявленной система стабилизации КА и выбрана в качестве прототипа, (патент RU 2090463, приоритет от 20.09.1997). Система включает канал управления по тангажу и канал управления по рысканию, каждый из которых содержит датчики отклонения линейных ускорений и скорости и датчики отклонения угловых ускорений и скорости, выходы которых через суммирующий усилитель подключены к входам рулевых машинок, обеспечивающих плоскопараллельные перемещения подвеса с двигателем. Указанная система стабилизации была использована при разработке разгонного блока «Фрегат» и позволяет повысить точность стабилизации в режиме кратковременных коррекций траектории за счет повышения точности стабилизации поперечных скоростей центра масс КА. Однако указанная система не позволяет устранить остальные проблемы стабилизации, присущие данной компоновке КА. К одной из таких проблем относится проблема разновыработки топлива из баков окислителя и горючего, что может привести к смещению центра тяжести КА к концу активных маневров до критической для обеспечения стабилизации величины, которая определяется возможно максимальным ходом штока РМ, т.е. зоной прокачки камеры двигателя. Для снижения вероятности такого развития событий приходится конструктивными способами обеспечивать необходимое исходное положение ЦТ в поперечной плоскости и путем замеров и регулировки минимизировать разницу гидравлических сопротивлений в трактах подачи компонентов топлива, что требует значительных технологических и материальных затрат и снижает надежность системы стабилизации.
Технической задачей, решаемой предлагаемым изобретением, является повышение надежности осуществления стабилизации при наличии разновыработки, способной привести к потере стабилизации КА.
Указанная задача обеспечивается тем, что в отличие от известной системы стабилизации космического аппарата (КА), содержащего двигательную установку со сферическими баками окислителя и горючего, симметрично расположенными относительно продольной оси КА, и ракетным двигателем, установленным в подвесе вблизи центра масса КА с возможностью осуществления плоскопараллельного перемещения подвеса с двигателем в плоскости, перпендикулярной продольной оси КА, включающая канал управления по тангажу и канал управления по рысканию, каждый из которых содержит датчики отклонения линейных ускорений и скорости и датчики отклонения угловых ускорений и скорости, выходы которых через суммирующий усилитель подключены к входам рулевых машинок, обеспечивающих плоскопараллельные перемещения подвеса с двигателем, новым является то, что система стабилизации снабжена датчиками угла и интегрирующими устройствами, введенными в каналы управления по тангажу и рысканию, и двумя логическими блоками, подключенными к входам клапанов, управляющих наддувом в каждом баке, что определяет расход топлива из баков окислителя и горючего и подключением двигателей малой тяги, при этом в каждом из каналов управления по тангажу и рысканию вход интегрирующего устройства подключен ко второму выходу датчика отклонения угловых ускорений и скорости, а выходы датчика угла и интегрирующего устройства подключены соответственно к третьему и четвертому входу суммирующего усилителя, пятый вход которого подключен ко вторым выходам рулевых машинок, причем входы каждого логического блока подключены к третьим выходам рулевых машинок обоих каналов.
Снабжение системы стабилизации датчиками угла и интегрирующими устройствами, введенными в каналы управления по тангажу и рысканию, и логическими блоками, подключенными к входам клапанов, управляющих наддувом и, следовательно, расходом топлива из баков окислителя и горючего и подключением двигателей малой тяги, позволяет компенсировать разновыработку топлива из баков, снизить уровень возмущений, действующих на КА, и повысить быстроту и надежность осуществления стабилизации.
При этом подключение двигателей малой тяги к процессу стабилизации позволяет компенсировать на начальном этапе стабилизации определенную инерционность реакции от перераспределения расхода топлива в баках на процесс стабилизации КА.
Сущность изобретения поясняется чертежами, где:
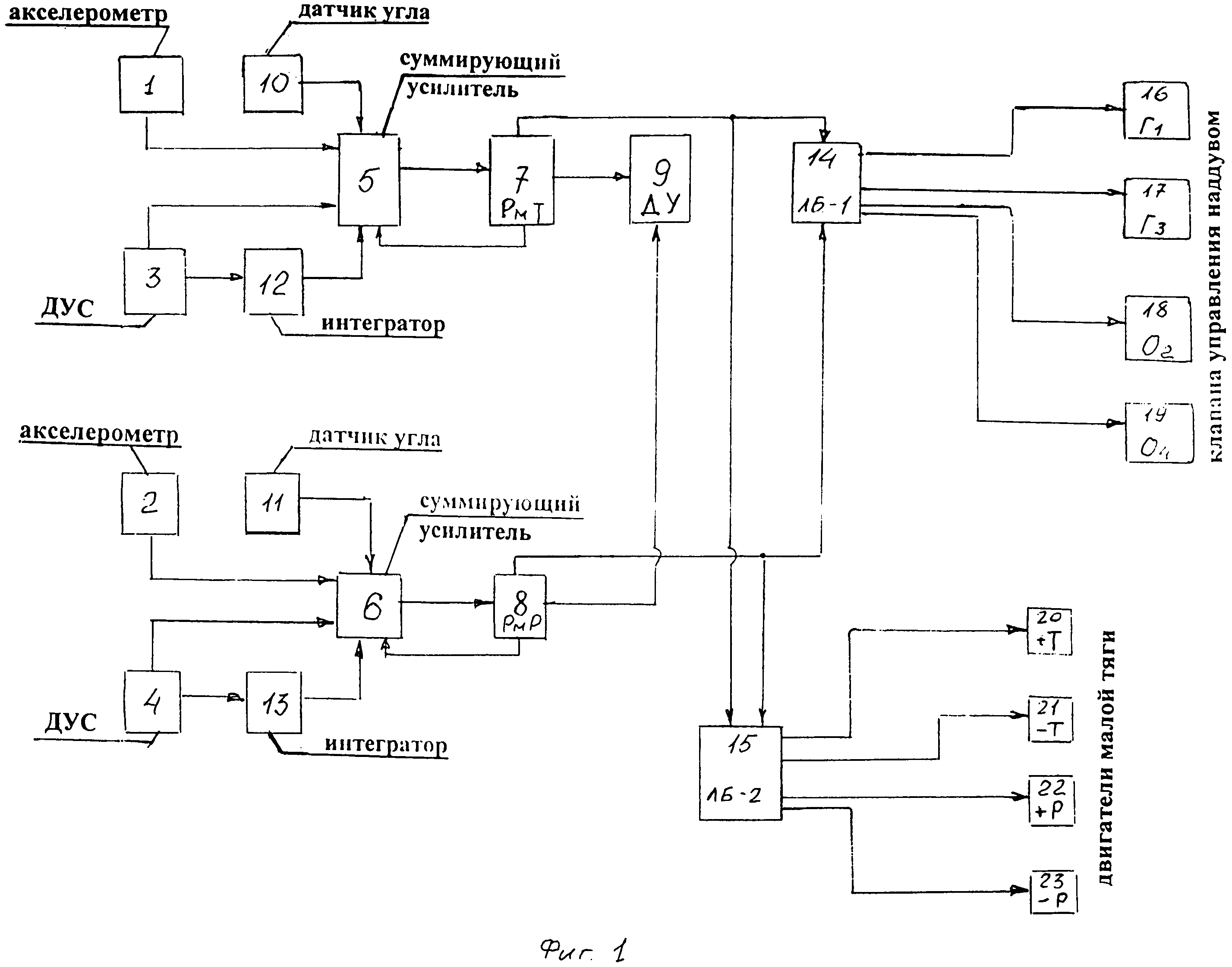
Фиг. 1 - структурная схема системы стабилизации;
Фиг. 2 - принципиальная схема 1-го логического блока;
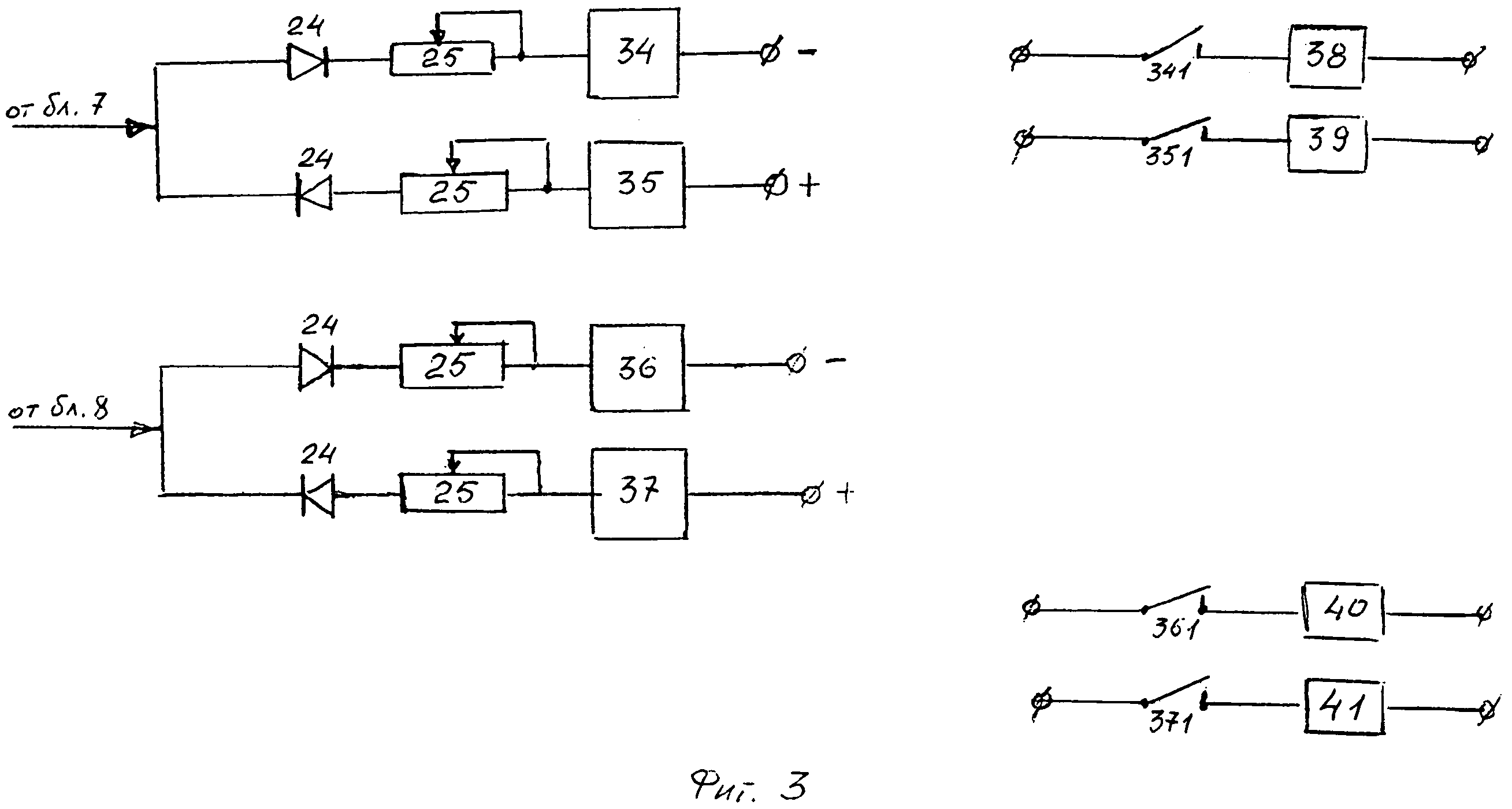
Фиг. 3 - принципиальная схема 2-го логического блока.
Предлагаемая система стабилизации предназначена для стабилизации космических аппаратов (КА), содержащего двигательную установку (ДУ) со сферическими баками окислителя и горючего, симметрично расположенными относительно продольной оси КА, и ракетный двигатель (РД), установленный в подвесе вблизи центра масса КА с возможностью осуществления плоскопараллельного перемещения подвеса с двигателем в плоскости, перпендикулярной продольной оси КА, например, ракетного разгонного блока «Фрегат». Система включает канал управления по тангажу («Т») и канал управления по рысканию («Р»), каждый из которых содержит датчики отклонения линейных ускорений и скорости 1, 2 и датчики отклонения угловых ускорений и скорости 3, 4, выходы которых через суммирующий усилитель 5, 6 подключены к входам рулевых машинок (РМ) 7, 8, обеспечивающих плоскопараллельные перемещения подвеса с двигателем 9. Канал тангажа («Т») обеспечивает управление линейным перемещением подвеса с двигателем 9 в плоскости YOZ вдоль оси «OZ» (штоком рулевых машинок 7 канала «Т»), а канал рыскания («Р») обеспечивает управление линейным перемещением подвеса с двигателем 9 в плоскости YOZ вдоль оси «OY» (штоком рулевых машинок 8 канала «Р»). Кроме того, каждый из каналов управления по тангажу («Т») и рысканию («Р») включает датчик угла 10, 11 и интегрирующее устройство 12, 13, подключенные к суммирующему усилителю 5, 6. Вход интегрирующего устройства 12, 13 подключен ко второму выходу датчика отклонения угловых ускорений и скорости 2. Пятый вход суммирующего усилителя 5, 6 подключен ко второму выходу рулевой машинки 7, 8. Составы приборов каналов тангажа и рыскания в этой части (блоки 1-13) являются идентичными и могут быть реализованы на базе известных технических решений, см. например, кн. «Управление космическим летательным аппаратом», К.Б. Алексеев, Г.Г. Бебенин, изд. Машиностроение, 1964 (1, 2 - стр. 115, Фиг. 4.2); (3, 4 - стр. 163, Фиг. 4-28); (5, 6 - стр. 217, Фиг. 5.17); (10, 11 - стр. 117, Фиг. 4.3); (12, 13 - стр. 218, Фиг. 5.19). Система снабжена двумя логическими блоками (ЛБ-1, ЛБ-2) 14, 15, подключенными к входам клапанов 16, 17, 18, 19, управляющих наддувом и, следовательно, расходом топлива из баков окислителя и горючего и подключением двигателей малой тяги 20, 21, 22, 23, причем входы каждого логического блока 14, 15 подключены к третьим выходам рулевых машинок 7, 8 обоих каналов. Пример реализации ЛБ-1 приведен на Фиг. 2, где 24 - развязывающие диоды; 25 - настроечные сопротивления, 26 - реле с нормально замкнутыми контактами и нормально разомкнутыми контактами в канале «+» тангаж; 27 - аналогичное реле в канале «-» тангаж; 28 - аналогичное реле в канале «+» рысканье; 29 - аналогичное реле в канале «-» рысканье; 261, 262, 213 - контактные группы реле 26; 271, 272, 273 - контактные группы реле 27; 281, 282, 283 - контактные группы реле 28; 291, 292, 293 - контактные группы реле 29; 30, 31 - соответственно реле управления клапанами наддува в первом и втором баках горючего; 32, 33 - соответственно реле управления клапанами наддува в первом и втором баках окислителя. Пример реализации ЛБ-2 приведен на Фиг. 3, где 24 - развязывающие диоды; 25 - настроечные сопротивления, 34 - реле с нормально замкнутыми контактами и нормально разомкнутыми контактами в канале «+» тангаж; 35 - реле в канала «-» тангаж; 36 - реле канала «+» рысканье; 37 - реле канала «-» рысканье; 341, 351, 361, 371 - контактные группы соответствующих реле 34, 35, 36, 37; 38 - реле управления двигателем малой тяги в канале «+» тангаж; 39 - реле управления двигателем малой тяги в канале «-» тангаж; 40 - реле управления двигателем малой тяги в канале «+» рысканье; 41 - реле управления двигателем малой тяги в канале «-» рысканье.
В процессе работы системы стабилизации на входы суммирующего усилителя 5, 6 помимо сигналов от датчиков 1, 2, 3, 4, 10, 11 и интегрирующего устройства 12, 13 поступает информация о положении штока рулевой машинки (РМ) 7, 8 в каждом канале стабилизации. При достижении в канале стабилизации тангажа первого порога заданной величины хода штока рулевой машины (например, 7), сигнал пропорциональный величине хода штока (например, с потенциометров обратной связи) поступает также на соответствующий вход логического блока ЛБ-1, который выдает команду на клапан управления наддувом в соответствующем баке. Величина наддува в этом баке снижается соответственно, снижается и расход компонента топлива из этого бака. Начинается процесс уменьшения величины эксцентриситета, вызванного накопившейся разновыработкой. Аналогичные процессы могут проходить и в канале стабилизации рысканья, приводя в конечном итоге к сокращению накопленного эксцентриситета до заданного уровня. Поскольку оси стабилизации, вдоль которых установлены РМ, и оси симметрии баков с топливом не совпадают (угол между ними составляет порядка 45°), ЛБ-1 использует для выработки управляющих команд информацию о положении штоков обеих РМ. Система подачи топлива устроена так, что за счет ограничения наддува в баке с меньшим количеством топлива происходит перераспределение расхода топлива из двух одноименных баков с сохранением общего расхода на выходе из турбонасосного агрегата (ТНА). Тяга ДУ при этом остается постоянной. Далее динамика процесса изменения положения ЦТ зависит от степени ограничения наддува. Для конкретной заправки баков степень ограничения может определяться экспериментально. Вследствие перераспределения расхода топлива величина отклонения центра тяжести (ЦТ) будет уменьшаться. В случае максимальной заправки баков и большей продолжительности работы двигательной установки возможен случай, когда предпринятое ограничение наддува в конкретном баке приведет к нарастанию эксцентриситета в противоположном направлении. В этом случае ЛБ-1 отключит клапан и восстановит исходную величину наддува. С целью гарантированного обеспечения стабилизации РБ, учитывая, что реакция перераспределения расхода топлива на ограничение наддува является медленным процессом и возможно, что в течение некоторого времени после включения клапана наддува эксцентриситет, ЦТ будет продолжать увеличиваться, дополнительно предусмотрено по второму уровню управляющего сигнала на входе ЛБ-2 подключение двигателей стабилизации РБ на пассивных участках, что дает некоторый запас по расширению возможной зоны обеспечения стабилизации РБ. Принципиальным является то, что подключение двигателей малой тяги производится в результате анализа положения основного управляющего двигателя, а не по результатам измерения динамических параметров стабилизации РБ. Принцип действия логической схемы следующий: при достижении величины хода штока, например, в канале РМТ соответствующего значения, определяемого настроечным сопротивлением, в зависимости от знака управляющего тока, срабатывает соответствующее реле 26 или 27. Соответствующее положение займут контактные группы этого реле, в результате чего подана команда на отключение клапанов наддува в соответствующем баке топлива. Поскольку в нашем случае оси стабилизации РБ и оси симметрии баков не совпадают, то отключение клапана наддува соответствующего бака определяется исходя из величины и знака ходов штока РМ в каналах тангажа и рыскания, как следует из представленной схемы. На входы логического устройства ЛБ-2 через развязывающие диоды и настроечные сопротивления подаются сигналы, пропорциональные ходу штоков рулевых машинок в каналах тангажа и рыскания. В зависимости от знака входного сигнала в каждом канале стабилизации ЛБ-2 вырабатывает сигналы на подключение соответствующих двигателей малой тяги (ДМТ), создающих дополнительный управляющий момент в канале тангажа и в канале рыскания.
Предлагаемая система стабилизации позволяет снизить уровень возмущений, действующих на КА, и повысить быстроту и надежность осуществления стабилизации.
Система стабилизации космического аппарата (КА), содержащего двигательную установку со сферическими баками окислителя и горючего, симметрично расположенными относительно продольной оси КА, и ракетным двигателем, установленным в подвесе вблизи центра масса КА с возможностью осуществления плоскопараллельного перемещения подвеса с двигателем в плоскости, перпендикулярной продольной оси КА, включающая канал управления по тангажу и канал управления по рысканию, каждый из которых содержит датчики отклонения линейных ускорений и скорости и датчики отклонения угловых ускорений и скорости, выходы которых через суммирующий усилитель подключены к входам рулевых машинок, обеспечивающих плоскопараллельные перемещения подвеса с двигателем, отличающаяся тем, что система стабилизации снабжена датчиками угла и интегрирующими устройствами, введенными в каналы управления по тангажу и рысканию, и двумя логическими блоками, подключенными к входам клапанов, управляющих расходом топлива из баков окислителя и горючего и подключением двигателей малой тяги, при этом в каждом из каналов управления по тангажу и рысканию вход интегрирующего устройства подключен ко второму выходу датчика отклонения угловых ускорений и скорости, а выходы датчика угла и интегрирующего устройства подключены соответственно к третьему и четвертому входу суммирующего усилителя, пятый вход которого подключен ко вторым выходам рулевых машинок, причем входы каждого логического блока подключены к третьим выходам рулевых машинок обоих каналов.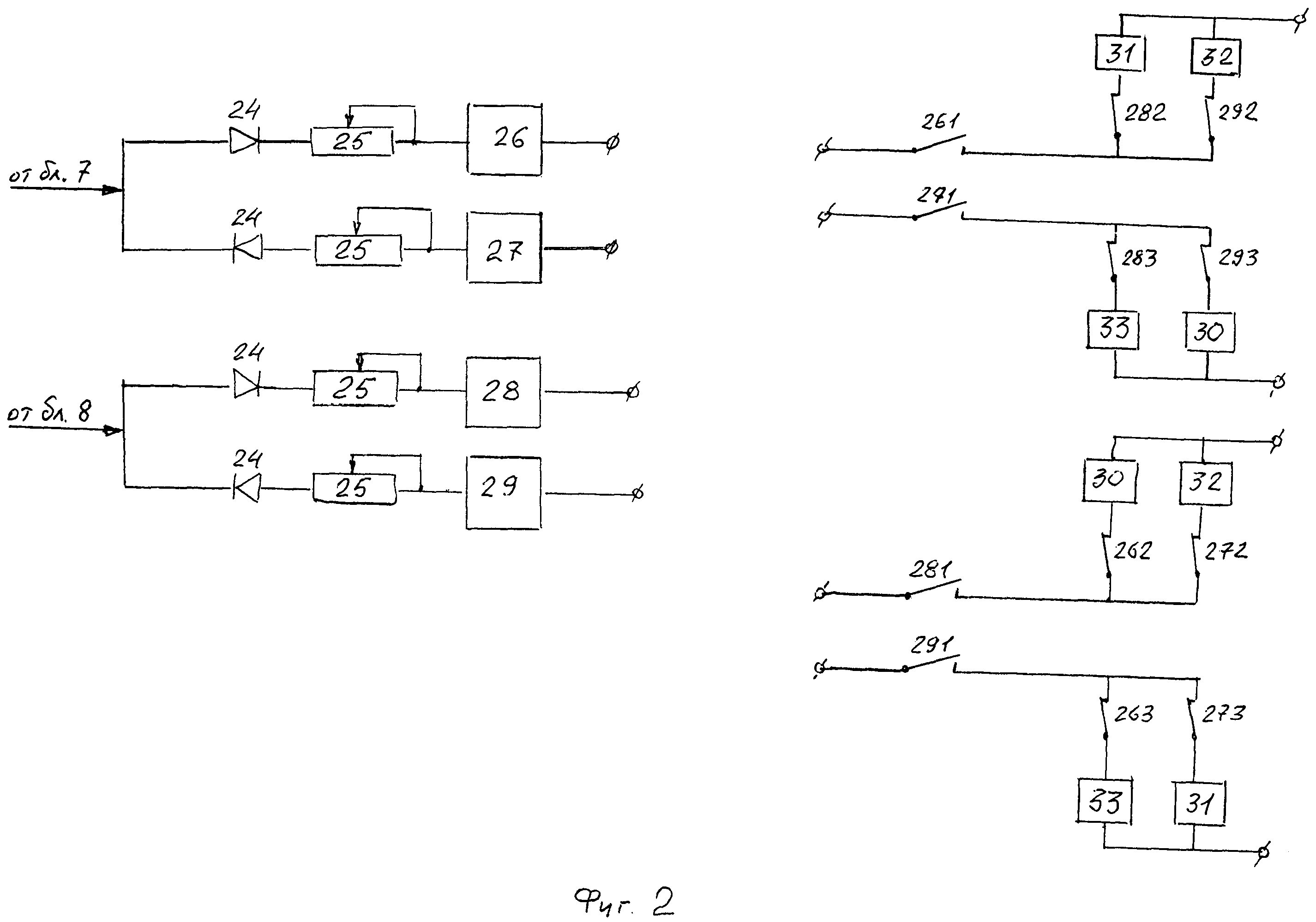
Топливный бак
Способ взлета летательного аппарата с катапульты и катапульта для взлета летательного аппарата
Катапульта для взлета летательного аппарата
Датчик для регистрации и замера параметров метеороидных и техногенных частиц, межзвездной и межпланетной пыли, воздействующих на космический аппарат
Разгонный блок и силовой шпангоут (2 варианта)
Способ защиты полезного груза на участке выведения космической головной части и устройство для его осуществления
Система отделения полезной нагрузки от космического аппарата
Криогенный экран
Наклеиваемый полупроводниковый тензорезистор
Наклеиваемый полупроводниковый тензорезистор
Переходной отсек ракеты-носителя и ферма
Устройство для группового запуска спутников
Устройство для группового запуска спутников и усиленный шпангоут

