Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано при создании средств обнаружения высокоскоростных воздушных целей.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ обнаружения воздушных целей, реализованный в импульсно-доплеровской (ИД) РЛС, основанный на формировании и излучении зондирующего сигнала, представляющего собой когерентную пачку радиоимпульсов, приеме и предварительной обработке аддитивной смеси отраженного от воздушной цели полезного сигнала с шумом, накоплении энергии данной смеси с когерентном накоплении энергии полезного сигнала в рамках отдельных участков зоны приема между радиоимпульсами зондирующего сигнала (участков зоны приема), образованных с помощью неподвижных временных стробов, согласованных с длительностью данных радиоимпульсов, формировании решения о наличии полезного сигнала в принятой смеси, если ее накопленная энергия превышает заданный порог, формировании решения об отсутствии полезного сигнала в принятой смеси в противном случае (см., например, Оценивание дальности и скорости в радиолокационных системах. Ч. 1 / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2004. С. 242-243).
К основным недостаткам прототипа относится снижение вероятности обнаружения воздушных целей при увеличении скорости их сближения с носителем ИД РЛС. Причиной этого является то, что увеличение скорости сближения воздушной цели с носителем ИД РЛС приводит к значительному изменению временного положения отраженного от воздушной цели сигнала в течение времени когерентного накопления и распределению его энергии между отдельными неподвижными участками зоны приема, что является причиной снижения отношения сигнал/шум в каждом из них.
Техническим результатом изобретения является повышение вероятности обнаружения высокоскоростных воздушных целей за счет учета скорости их сближения с носителем ИД РЛС.
Указанный результат достигается тем, что в известном способе обнаружения воздушных целей после излучения зондирующего сигнала с использованием измеренного значения воздушной скорости носителя ИД РЛС и угловых координат линии главного луча диаграммы направленности (ДН) ИД РЛС определяют проекцию воздушной скорости носителя ИД РЛС на линию главного луча ДН ИД РЛС с использованием значения максимально возможной скорости движения воздушной цели, оценивают максимально и минимально возможные скорости сближения воздушной цели с носителем ИД РЛС, определяют шаг дискретизации скорости сближения воздушной цели с носителем ИД РЛС, определяют для каждого n-го канала обнаружения ожидаемую скорость сближения воздушной цели с носителем ИД РЛС, где  , N - число каналов обнаружения, определяют для каждого n-го канала обнаружения скорость перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала, после приема аддитивной смеси отраженного от воздушной цели полезного сигнала с шумом в каждом n-м канале обнаружения перемещают разделяющие зону приема на отдельные подвижные участки временные стробы со скоростью, согласованной с ожидаемой в данном канале скоростью сближения воздушной цели с носителем ИД РЛС, в каждом n-м канале обнаружения накапливают энергию принятой смеси с когерентным накоплением энергии полезного сигнала в рамках подвижных участков зоны приема, определяют из совокупности каналов обнаружения канал обнаружения с максимальной накопленной энергией принятой смеси.
, N - число каналов обнаружения, определяют для каждого n-го канала обнаружения скорость перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала, после приема аддитивной смеси отраженного от воздушной цели полезного сигнала с шумом в каждом n-м канале обнаружения перемещают разделяющие зону приема на отдельные подвижные участки временные стробы со скоростью, согласованной с ожидаемой в данном канале скоростью сближения воздушной цели с носителем ИД РЛС, в каждом n-м канале обнаружения накапливают энергию принятой смеси с когерентным накоплением энергии полезного сигнала в рамках подвижных участков зоны приема, определяют из совокупности каналов обнаружения канал обнаружения с максимальной накопленной энергией принятой смеси.
Сущность изобретения заключается в применении N каналов обнаружения, в которых когерентное накопление энергии полезного сигнала осуществляется в рамках подвижных участков, образованных путем перемещения временных стробов с соответствующей каждому каналу скоростью, согласованной с ожидаемой скоростью сближения воздушной цели с носителем ИД РЛС. Это позволяет избежать потери энергии сигнала отраженного от воздушной цели, характерной для одного канала обнаружения с неподвижными временными стробами.
Данный способ включает в себя следующие этапы:
1. Формирование и излучение зондирующего сигнала, представляющего собой когерентную пачку радиоимпульсов;
2. Определение проекции воздушной скорости на линию главного луча ДН ИД РЛС в соответствии с выражением:

где Vf - измеренное значение воздушной скорости носителя ИД РЛС, φh, φV - угловые координаты линии главного луча ДН ИД РЛС;
3. Оценка максимально и минимально возможных скоростей сближения воздушной цели с носителем ИД РЛС в соответствии с выражениями:

где Vt max - максимально возможное значение скорости движения воздушной цели;
4. Определение шага дискретизации скорости сближения воздушной цели с носителем ИД РЛС в соответствии с выражением:

5. Определение ожидаемой скорости сближения воздушной цели с носителем ИД РЛС для n-го канала обнаружения в соответствии с выражением:

6. Определение скорости перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала для n-го канала обнаружения в соответствии с выражением:

7. Прием и предварительная обработка аддитивной смеси:

где s(t,Õ) - полезный сигнал, отраженный от воздушной цели, n(t) - шум, q - дискретный параметр, характеризующий наличие или отсутствие полезного сигнала, отраженного от воздушной цели в смеси ξ(t), то есть

8. Усиление смеси ξ(t) в N раз.
9. Равномерное разделение мощности смеси ξ(t) между N каналами обнаружения.
10. Параллельная обработка смеси ξ(t) в N каналах обнаружения, где обработка в каждом n-м канале обнаружения представляет собой последовательное выполнение следующих операций:
- перемещение временных стробов, разбивающих зону приема между радиоимпульсами зондирующего сигнала на отдельные подвижные участки, со скоростью Vdn;
- накопление энергии принятой смеси En с когерентным накоплением энергии полезного сигнала в рамках подвижных участков зоны приема.
14. Выбор канала обнаружения под номером n* с максимальной накопленной энергией En из совокупности каналов обнаружения в соответствии с выражением:

15. Формирование в канале обнаружения под номером n* решения о наличии или отсутствии полезного сигнала s(t,x) в смеси ξ(t) по решающему правилу, реализованному в прототипе.
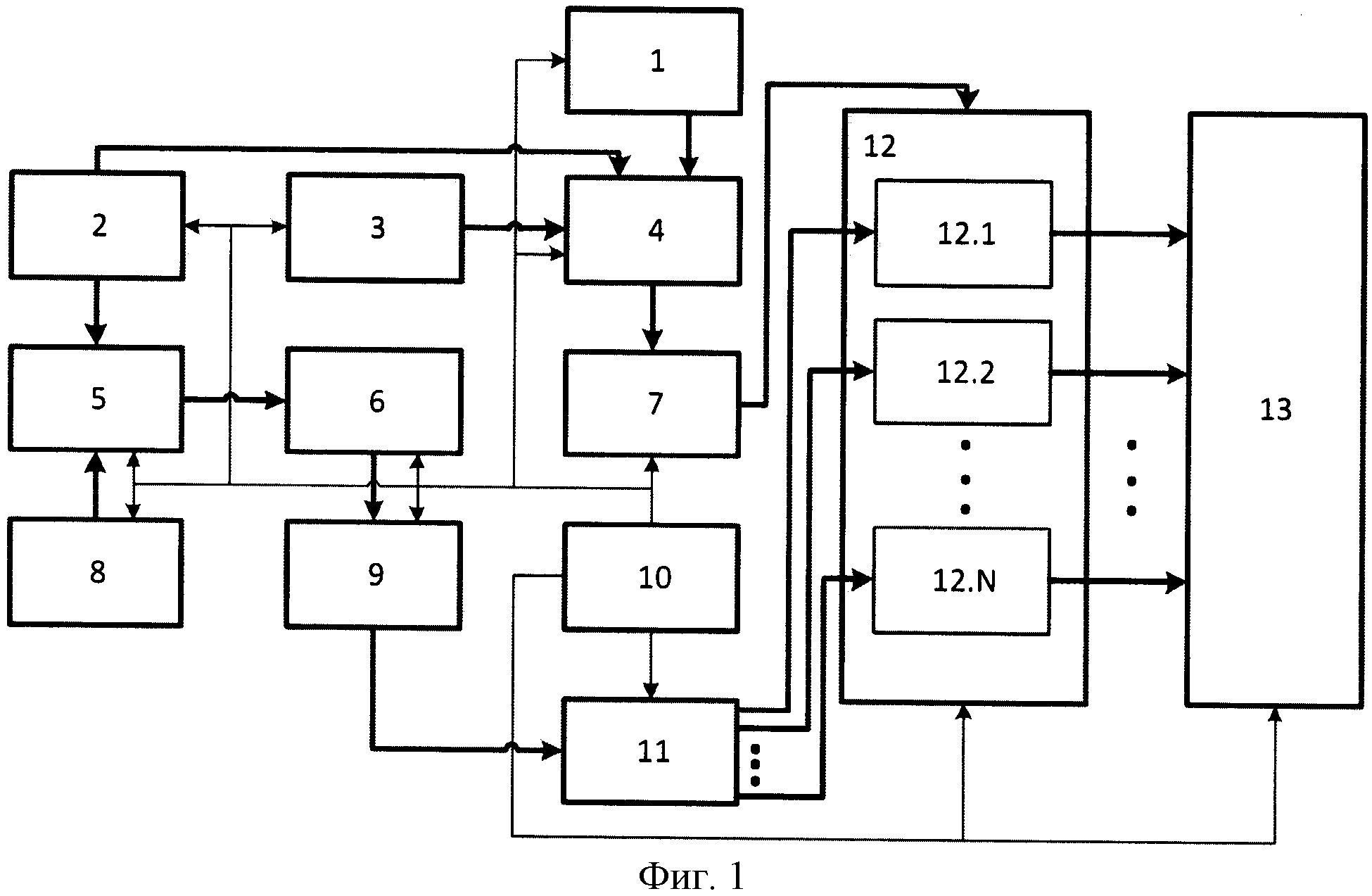
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре 1, где обозначено: 1 - постоянное запоминающее устройство; 2 - устройство управления антенной; 3 - датчик воздушной скорости; 4 - вычислительное устройство; 5 - антенна; 6 - приемник; 7 - устройство управления временными стробами; 8 - передатчик; 9 - усилитель мощности; 10 - синхронизатор; 11 - делитель мощности; 12 - блок каналов обнаружения; 13 - решающее устройство.
Постоянное запоминающее устройство 1 предназначено для записи и хранения значения максимально возможной скорости движения воздушной цели Vt max. Устройство управления антенной 2 предназначено для своевременного подключения к антенне 5 передатчика 8 на этапе передачи и приемника 6 на этапе приема, а также для управления главным лучом ДН ИД РЛС. Датчик воздушной скорости 3 предназначен для измерения воздушной скорости носителя ИД РЛС Vf. Вычислительное устройство 4 предназначено для: определения проекции воздушной скорости носителя ИД РЛС на линию главного луча ДН ИД РЛС Vfc в соответствии с выражением (1); оценки максимально и минимально возможных скоростей сближения воздушной цели с носителем ИД РЛС Vmax и Vmin в соответствии с выражениями (2); определения шага дискретизации скорости сближения воздушной цели с носителем ИД РЛС ΔV в соответствии с выражением (3); определения ожидаемой скорости сближения воздушной цели с носителем ИД РЛС для каждого n-го канала обнаружения Vn в соответствии с выражением (4); определения скорости перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала для каждого n-го канала обнаружения Vdn в соответствии с выражением (5). Антенна 5 предназначена для преобразования поступающего с передатчика электрического сигнала s(t) в электромагнитную волну и его излучения на этапе передачи, а также для преобразования смеси из электромагнитной волны в электрический сигнал на этапе приема. Приемник 6 предназначен для приема и предварительной обработки смеси ξ(t). Устройство управления временными стробами 7 предназначено для управления временными стробами каналов обнаружения 12.1-12.N в соответствии с определенными в вычислительном устройстве 4 скоростями перемещения временных стробов Vdn в пределах зоны приема между радиоимпульсами зондирующего сигнала. Передатчик 8 предназначен для формирования зондирующего сигнала ИД РЛС s(t). Синхронизатор 10 предназначен для синхронизации работы элементов устройства. Блок каналов обнаружения 12 предназначен для параллельной обработки смеси ξ(t) в N каналах обнаружения. Каждый n-й канал обнаружения (12.1-12.N) предназначен для накопления энергии смеси ξ(t) с когерентным накоплением отраженного от воздушной цели полезного сигнала s(t,Õ) в пределах временных стробов, перемещающихся со скоростями Vdn. Решающее устройство 13 предназначено для выбора канала обнаружения под номером n* с максимальной накопленной энергией En из совокупности каналов обнаружения в соответствии с выражением (8), а также для принятия решения о наличии или отсутствии полезного сигнала s(t,Õ) в смеси ξ(t) по решающему правилу, реализованному в прототипе.
Устройство работает следующим образом. Синхронизатор 10 синхронизирует работу элементов устройства. Передатчик 8 формирует зондирующий сигнал ИД РЛС s(t). Устройство управления антенной 2 на этапе передачи подключает выход передатчика 8 к входу антенны 5 и управляет главным лучом ДН ИД РЛС. Сигнал с выхода передатчика 8 поступает на вход антенны 5. Антенна 5 преобразует электрический сигнал в электромагнитную волну и излучает его в окружающую среду. Параллельно с формированием и излучением зондирующего сигнала с выхода постоянного запоминающего устройства 1 на вход вычислительного устройства 4 поступает значение максимально возможной скорости движения воздушной цели Vt max, с выхода датчика воздушной скорости 3 на вход вычислительного устройства поступает измеренное значение воздушной скорости носителя ИД РЛС Vf, с выхода устройства управления антенной 2 на вход вычислительного устройства 4 поступают угловые координаты линии главного луча ДН ИД РЛС [φh, φV]. Вычислительное устройство 4 определяет проекцию воздушной скорости носителя ИД РЛС на линию главного луча ДН ИД РЛС Vfc в соответствии с выражением (1), оценивает максимально и минимально возможные скорости сближения воздушной цели с носителем ИД РЛС Vmax и Vmin в соответствии с выражениями (2), определяет шаг дискретизации скорости сближения воздушной цели с носителем ИД РЛС ΔV в соответствии с выражением (3), определяет ожидаемую скорость сближения воздушной цели с носителем ИД РЛС Vn для каждого n-го канала обнаружения в соответствии с выражением (4), определяет скорость перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала для каждого n-го канала обнаружения Vdn в соответствии с выражением (5). На этапе приема смесь ξ(t) в виде электромагнитной волны поступает на вход антенны 5. Антенна 5 преобразует смесь ξ(t) из электромагнитной волны в электрический сигнал. Устройство управления антенной 2 на этапе приема подключает к выходу антенны 5 вход приемника 6. Смесь ξ(t) поступает с выхода антенны 5 на вход приемника 6. Приемник 6 принимает и производит предварительную обработку смеси ξ(t). С выхода приемника 6 смесь поступает на вход усилителя мощности 9. Усилитель мощности 9 усиливает смесь ξ(t) в N раз. С выхода усилителя мощности 9 смесь ξ(t) поступает на вход делителя мощности 11. Делитель мощности 11 разделяет мощность смеси ξ(t) равномерно между N каналами обнаружения. С N выходов делителя мощности 11 смесь ξ(t) поступает на входы N каналов обнаружения 12.1-12.N блока каналов обнаружения 12. Устройство управления временными стробами 7 управляет перемещением временных стробов каналов обнаружения 12.1-12.N в соответствии с определенными в вычислительном устройстве 4 скоростями перемещения Vdn в пределах зоны приема между радиоимпульсами зондирующего сигнала. Блок каналов обнаружения 12 осуществляет параллельную обработку смеси ξ(t) в N каналах обнаружения. При этом каждый n-й канал обнаружения (12.1-12.N) осуществляет накопление энергии принятой смеси En в рамках подвижных участков зоны приема, образованных перемещаемыми временными стробами, с когерентным накоплением энергии полезного сигнала. С N выходов блока каналов обнаружения 12 на вход решающего устройства 13 поступает накопленная в каждом n-м канале обнаружения энергия смеси En. Решающее устройство 13 выбирает канал обнаружения под номером n* с максимальной накопленной энергией En из совокупности каналов обнаружения в соответствии с выражением (8), а также формирует решение о наличии или отсутствии полезного сигнала s(t,Õ) в смеси ξ(t) по решающему правилу, реализованному в прототипе.
Для определения эффективности предлагаемого способа оценивались следующие показатели:
- вероятность правильного обнаружения воздушных целей в ИД РЛС, функционирующей в соответствии с предлагаемым способом P0.
- вероятность правильного обнаружения воздушных целей в ИД РЛС, функционирующей в соответствии с известным способом P1 (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.).
Показатели P0, P1 оценивались путем проведения статистических испытаний на соответствующих имитационных моделях ИД РЛС при одинаковых начальных условиях.
Для характеристики эффективности предлагаемого способа определялся прирост вероятности правильного обнаружения воздушных целей в ИД РЛС за счет применения предлагаемого способа по отношению к данному показателю с применением известного способа в процентах  .
.
На фигуре 2 приведен график зависимости величины ΔP от скорости сближения воздушной цели с носителем ИД РЛС V, где M - единица измерения скорости «мах».
Из анализа графика, приведенного на фигуре 2, видно, что применение предлагаемого способа приводит к существенному повышению вероятности правильного обнаружения воздушных целей при увеличении скорости их сближения с носителем ИД РЛС. Так, например, для V=10М прирост вероятности правильного обнаружения составляет ΔP≈20%, в то время как для V=12М, при прочих равных условиях прирост вероятности правильного обнаружения составляет ΔP≈50%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ обнаружения высокоскоростных воздушных целей с применением дополнительных каналов обнаружения, в которых временные стробы перемещаются в пределах зоны приема между радиоимпульсами зондирующего сигнала в течение времени когерентного накопления с соответствующей каждому каналу скоростью, согласованной с ожидаемой скоростью сближения воздушной цели с носителем ИД РЛС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что применение N каналов обнаружения, в которых когерентное накопление энергии полезного сигнала осуществляется в рамках подвижных участков, образованных путем перемещения временных стробов с соответствующей каждому каналу скоростью, согласованной с ожидаемой скоростью сближения воздушной цели с носителем ИД РЛС, увеличивает вероятность правильного обнаружения высокоскоростных воздушных целей.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Способ обнаружения высокоскоростных воздушных целей, основанный на формировании и излучении зондирующего сигнала, представляющего собой когерентную пачку радиоимпульсов, приеме аддитивной смеси отраженного от воздушной цели полезного сигнала с шумом, обработке данной смеси с когерентным накоплением энергии полезного сигнала в рамках отдельных неподвижных участков, образованных временными стробами, согласованными по времени с длительностью радиоимпульсов зондрующего сигнала, формировании решения о наличии полезного сигнала в принятой смеси, если ее накопленная энергия превышает заданный порог, формировании решения об отсутствии полезного сигнала в принятой смеси в противном случае, отличающийся тем, что после излучения зондирующего сигнала с использованием измеренного значения воздушной скорости носителя импульсно доплеровской (ИД) РЛС и угловых координат линии главного луча диаграммы направленности (ДН) ИД РЛС определяют проекцию воздушной скорости носителя ИД РЛС на линию главного луча ДН ИД РЛС с использованием значения максимально возможной скорости движения воздушной цели, оценивают максимально и минимально возможные скорости сближения воздушной цели с носителем ИД РЛС, определяют шаг дискретизации скорости сближения воздушной цели с носителем ИД РЛС, определяют для каждого n-го канала обнаружения ожидаемую скорость сближения воздушной цели с носителем ИД РЛС, где , N - число каналов обнаружения, определяют для каждого n-го канала обнаружения скорость перемещения временных стробов в пределах зоны приема между радиоимпульсами зондирующего сигнала, после приема аддитивной смеси отраженного от воздушной цели полезного сигнала с шумом в каждом n-м канале обнаружения перемещают разделяющие зону приема на отдельные подвижные участки временные стробы со скоростью, согласованной с ожидаемой в данном канале скоростью сближения воздушной цели с носителем ИД РЛС, в каждом n-м канале обнаружения накапливают энергию принятой смеси с когерентным накоплением энергии полезного сигнала в рамках подвижных участков зоны приема, определяют из совокупности каналов обнаружения канал обнаружения с максимальной накопленной энергией принятой смеси.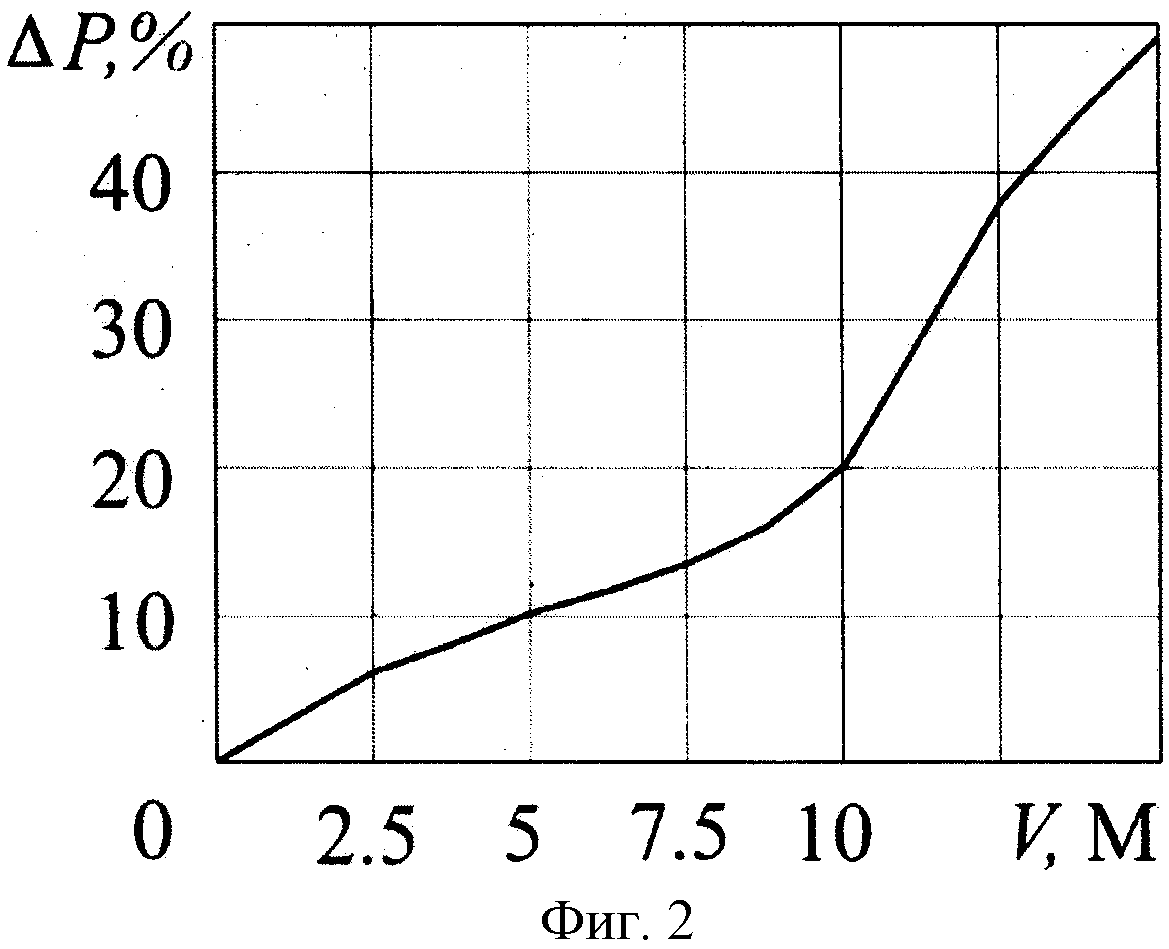

Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования земли в телескопическом режиме
Способ устранения импульсных помех на цветных изображениях
Радиолокационная станция
Датчик для исследования потоков метеороидных и техногенных частиц в космическом пространстве
Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Пироклапан
Мобильная пусковая установка
Преобразователь частоты с использованием зеркального канала
Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования земли в телескопическом режиме
Способ устранения импульсных помех на цветных изображениях
Радиолокационная станция
Датчик для исследования потоков метеороидных и техногенных частиц в космическом пространстве
Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Пироклапан

