Результат интеллектуальной деятельности: ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может быть использовано в системах ориентации, навигации и управления такими подвижными объектами, как самолет, корабль, автомобиль, микроробот и другими, где требуется информация об угловых скоростях и кажущихся ускорениях. Особенность прибора состоит в том, что он является микромеханическим роторного типа.
Известен микромеханический гироскоп, разработанный в лаборатории им. Дрейпера Массачусетского технологического института США (Barbour Ν., Conelly J., Gilmore J., e.a. "Micro-Electromechanical Instrument and Systems Development at Draper Laboratory" // 3rd Saint Petersburg International Conference on Integrated Navigation Systems. Part 1, May 1996, p.p.3-10.). Он является гироскопом камертонного типа и представляет собой две вибрирующие массы, подвешенные на двух гибких опорах. Это камертон с верхней и нижней ножками (торсионами). Закрепленные массы вибрируют под действием электростатических датчиков силы гребенчатой структуры во взаимно-встречных направлениях, т.е. совершают плоские противофазные колебания. При наличии измеряемой угловой скорости вокруг оси торсионов рамка с чувствительными массами под действием сил Кориолиса начинает совершать угловые колебания относительно корпуса, а также вокруг оси торсионов. Эти колебания измеряются с помощью емкостных датчиков перемещений, расположенных под чувствительными массами. Амплитуда измеренных колебаний пропорциональна величине измеряемой угловой скорости, а фаза определяет знак этой скорости.
Известна также конструкция микромеханического гироскопа (Северов Л.А., Пономарев В.К., Панкратов А.И. и др. Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития. // Изв. вузов РФ - Приборостроение. 1998, №1-2, с. 57.) с чувствительным элементом в виде кольца, закрепленного с помощью растяжек на центральной стойке, связанной с корпусом через упругие элементы. С помощью электростатических датчиков силы кольцо приводится в колебательное движение вокруг оси растяжек. Для съема информации используется емкостный преобразователь.
Недостатком обоих микромеханических гироскопов является недостаточно высокая точность из-за малой величины кинетического момента, что объясняется тем, что чувствительные элементы совершают не вращательное, а колебательные движения. В силу этого, амплитудное значение кинетического момента составляет величины 10-3-10-4 гс·см·c.
Известен "Левитирующий микромотор" (акселерометр) (Pat. US 5187399, William N. Carr, Hong Yu, Dong-Il D. Cho, pabl. date 16.02.1993 г.), в котором указано применение этого микромотора в качестве акселерометра.
Недостатком является то, что данная конструкция не обеспечивает измерение угловой скорости подвижного объекта (ПО).
Наиболее близким к заявляемому техническому решению является гироскоп-акселерометр с электростатическим подвесом ротора (Пат. РФ №2158903, МПК G01C 19/24, G01P 15/14, 2000 г., авторы Чеботаревский Ю.В., Мельников А.В., Плотников П.К.), содержащий статически и динамически сбалансированный ротор в виде круглой пластины с отверстиями, имеющий электропроводящие части и окруженный статорами, в состав которых входит торцевой, нижний и верхний планарные статоры подвеса, а также нижний и верхний статоры вращающего момента. При этом торцевой статор подвеса состоит из четного числа плоских электродов, расположенных в экваториальной плоскости ротора по окружности и закрепленных в боковых стенках нижней электроизолирующей втулки, укрепленной в корпусе. В конструкцию также входят нижний и верхний одинаковые планарные статоры подвеса, каждый выполненный в виде четного числа плоских электродов, расположенных по окружности и закрепленных в нижней и верхней электроизолирующих втулках, причем последняя укреплена в крышке гироскопа-акселерометра, а каждый из двух соседних плоских электродов любого из статоров подвеса вместе с последовательно включенными с ними источником высокочастотного напряжения и дросселем образуют измерительную цепочку. Кроме того, нижний и верхний планарные статоры вращающего момента, закрепленные в нижней и верхней электроизолирующих втулках, состоящих из плоских электродов, соединены в три секции, так что в каждую секцию входят электроды, расположенные через два соседних на третий, секции соединены с тремя фазами источника переменного тока, в состав устройства входит схема обработки информации, содержащая измерительные цепочки. В схему входят эталонные резисторы, фазочувствительные выпрямители (ФЧВ), сумматоры, устройства вычитания, масштабирующие элементы, так что каждая измерительная цепочка дополнена эталонным резистором путем последовательного его включения с источником высокочастотного напряжения, дросселем и парой электродов, а также ФЧВ, первый и второй входы которого параллельно соединены с источником высокочастотного напряжения и эталонным резистором соответственно, а его выход является выходом измерительной цепочки. При этом выходы измерительных цепочек с положительными и отрицательными координатами торцевых электродов подвеса первой измерительной оси соединены с первым и вторым входами соответственно первого устройства вычитания, выход которого соединен с входом первого масштабирующего элемента, выход его является выходом по компоненту W(кажущегося ускорения, выходы измерительных цепочек торцовых электродов подвеса с положительными и отрицательными координатами соответственно по второй измерительной оси соединены с первым и вторым входами соответственно второго устройства вычитания, выход его соединен со входом второго масштабирующего устройства, выход которого является выходом по компоненту W(кажущегося ускорения, выходы двух измерительных цепочек верхних плоских электродов статоров подвеса с положительными и отрицательными координатами по первой измерительной оси соединены с первым и вторым входами соответственно третьего устройства вычитания, его выход соединен с входом третьего масштабирующего элемента, выход которого является выходом по компоненту ωξ угловой скорости. В свою очередь, выходы измерительных цепочек с положительными и отрицательными координатами верхних плоских электродов статоров подвеса по второй измерительной оси соединены с первым и вторым входами первого сумматора, выход которого соединен с первым входом четвертого устройства вычитания, а со вторым входом четвертого устройства вычитания соединен выход второго сумматора, первый вход второго сумматора соединен с выходом измерительной цепочки с положительными плоскими электродами нижнего статора подвеса по второй измерительной оси, второй вход второго сумматора соединен с выходом измерительной цепочки с отрицательными координатами нижних электродов нижнего статора подвеса по второй измерительной оси, выход четвертого устройства вычитания соединен со входом четвертого масштабирующего элемента, который является выходом по компоненту Wζ кажущегося ускорения, а первый и второй входы второго сумматора соединены с первым и вторым входами пятого устройства вычитания, выход которого соединен с входом пятого масштабирующего элемента, выход его является выходом по компоненту ωη абсолютной угловой скорости.
Недостатком прибора-прототипа является невозможность измерения угловой скорости по третьему компоненту угловой скорости объекта, а следовательно, невозможность определения ориентации подвижного объекта.
Задачей данного изобретения является обеспечение проведения измерения угловой скорости по третьему компоненту угловой скорости объекта.
Технический результат изобретения состоит в том, что впервые в одном гироскопе-акселерометре в виде ротора с тремя степенями свободы измеряются три компонента кажущегося ускорения и три компонента абсолютной угловой скорости ПО, то есть полная первичная инерциальная информация. Только при ее наличии обеспечивается решение задачи определения трех углов ориентации и трех координат местоположения ПО.
Поставленная задача решается тем, что гироскоп-акселерометр с электростатическим подвесом ротора и полной первичной информацией, содержащий динамически и статически сбалансированный ротор в виде круглой пластины с отверстиями, имеющий электропроводящие части и окруженный статорами, в состав которых входят торцевой, нижний и верхний планарные статоры подвеса, а также нижний и верхний статоры вращающего момента, при этом торцевой статор подвеса состоит из четного числа плоских электродов, расположенных в экваториальной плоскости ротора по окружности и закрепленных в боковых стенках нижней электроизолирующей втулки, укрепленной в корпусе, нижний и верхний одинаковые планарные статоры подвеса, каждый выполненный в виде четного числа плоских электродов, расположенных по окружности и закрепленных на нижней и верхней электроизолирующих втулках, причем последняя укреплена в крышке гироскопа-акселерометра, кроме того, нижний и верхний планарные статоры вращающего момента, закрепленные в нижней и верхней электроизолирующих втулках, состоящих из плоских электродов, соединены в три секции так, что в каждую секцию входят электроды, расположенные через два соседних на третий, секции соединены с тремя фазами источника переменного тока, кроме того каждая пара соседних плоских электродов и эталонный резистор, последовательно включенный с источником высокочастотного напряжения, дросселем, а также фазочувствительным выпрямителем, образуют измерительную цепочку, при этом первый и второй входы фазочувствительного выпрямителя параллельно соединены с источником высокочастотного напряжения и эталонным резистором соответственно, а его выход является выходом измерительной цепочки, при этом выходы измерительных цепочек с положительными и отрицательными координатами торцевых электродов подвеса первой измерительной оси соединены с первым и вторым входами соответственно первого сумматора, выход которого соединен с входом первого масштабирующего элемента, выход его является выходом по компоненту Wξ кажущегося ускорения, выходы измерительных цепочек торцевых электродов подвеса с положительными и отрицательными координатами соответственно по второй измерительной оси соединены с помощью измерительных цепочек с первым и вторым входами соответственно второго сумматора, выход его соединен с входом второго масштабирующего устройства, выход которого является выходом по компоненту Wη кажущегося ускорения, согласно заявляемому техническому решению дополнительно содержит измерительные цепочки, содержащие две пары диаметрально расположенных торцевых электродов по положительному и отрицательному направлению третьей измерительной оси, пару электродов по положительному направлению второй измерительной оси, эталонный резистор по положительному направлению второй измерительной оси, распределенное сопротивление этой цепочки по положительному направлению второй измерительной оси, ФЧВ по положительному направлению второй измерительной оси, входы которого соединены с фильтром, третий масштабирующий элемент, выход которого служит для съема информации по третьему компоненту ωζ угловой скорости подвижного объекта. Также введены измерительные цепочки по третьей измерительной оси, выполненные с возможностью оценки зазоров между ротором и верхними и нижними плоскими электродами статоров, смещенными по второй измерительной оси в отрицательном направлении, выходы этих измерительных цепочек подключены к входам четвертого сумматора напряжений, выход которого соединен с первым входом первого устройства вычитания, ко второму инвертирующему входу его подключен выход пятого сумматора напряжений, входы которого соединены с выходами двух измерительных цепочек по третьей измерительной оси, выполненных с возможностью оценки зазоров между ротором и верхними и нижними плоскими электродами статоров, смещенными по второй измерительной оси в положительном направлении, при этом выход первого устройства вычитания соединен со входом четвертого масштабирующего элемента, выход которого является выходом по компоненту ωξ угловой скорости ПО. Выходы двух измерительных цепочек, выполненных с возможностью оценки зазоров по третьей измерительной оси между ротором и верхними и нижними плоскими электродами статоров, смещенными по отрицательному направлению первой измерительной оси, подключены к входам шестого сумматора, выходы двух измерительных цепочек, выполненных с возможностью оценки зазоров по третьей измерительной оси между ротором и верхними и нижними плоскими электродами статоров, смещенными по положительному направлению первой измерительной оси, соединены со входами седьмого сумматора напряжения, выходы шестого и седьмого сумматоров напряжений соединены со входом девятого сумматора, выход которого подключен ко входу шестого масштабирующего элемента, выход которого является выходом по компоненте Wζ кажущегося ускорения ПО. Также выходы шестого и седьмого сумматоров соединены с первым и вторым входами второго устройства вычитания, выход которого соединен с входом пятого масштабирующего элемента, выход его является выходом по компоненту ωη абсолютной угловой скорости.
Заявляемое изобретение поясняется чертежами: фиг. 1-7.
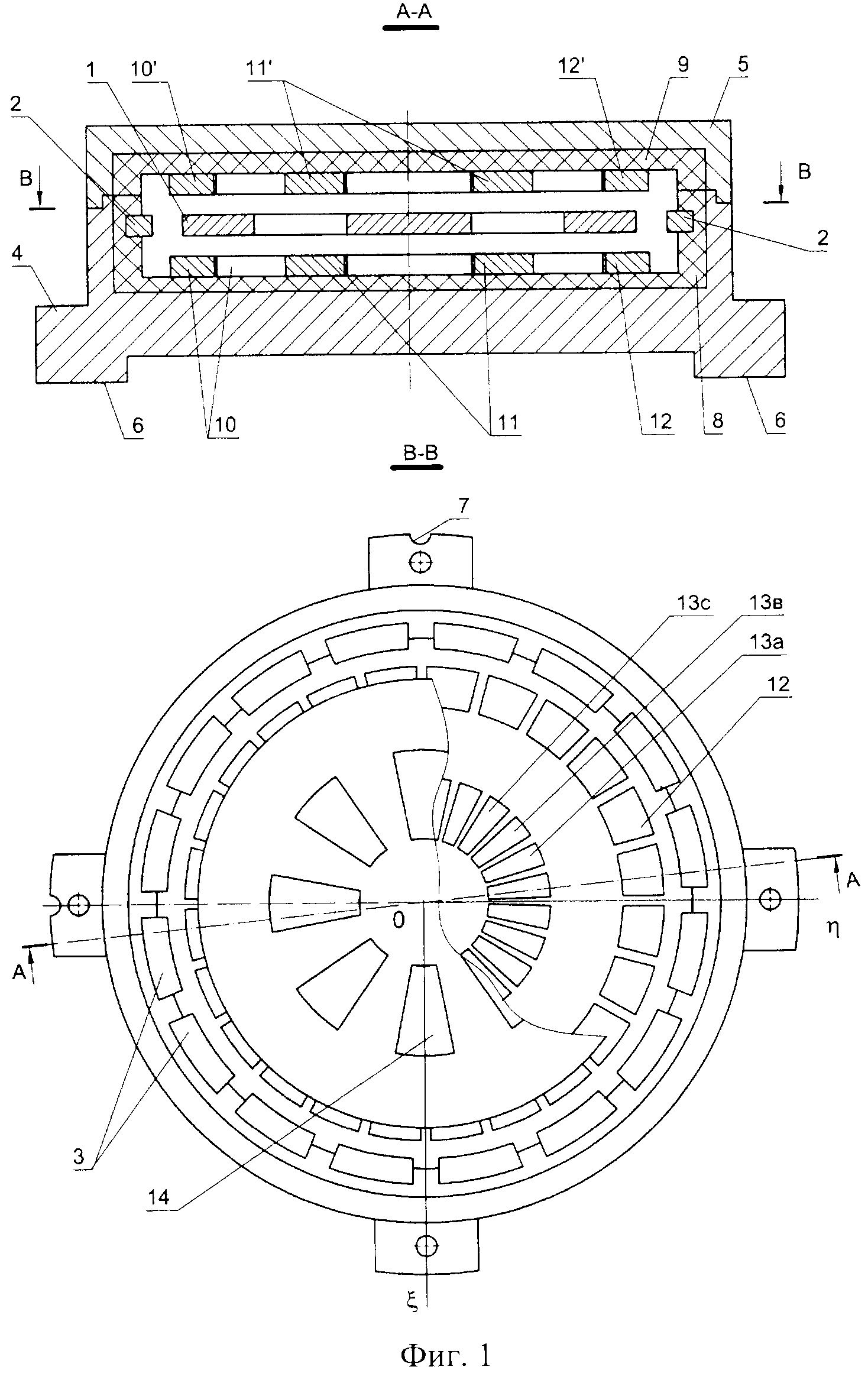
На фиг. 1 представлена конструктивная схема гироскопа-акселерометра с электростатическим подвесом ротора и полной первичной информацией.
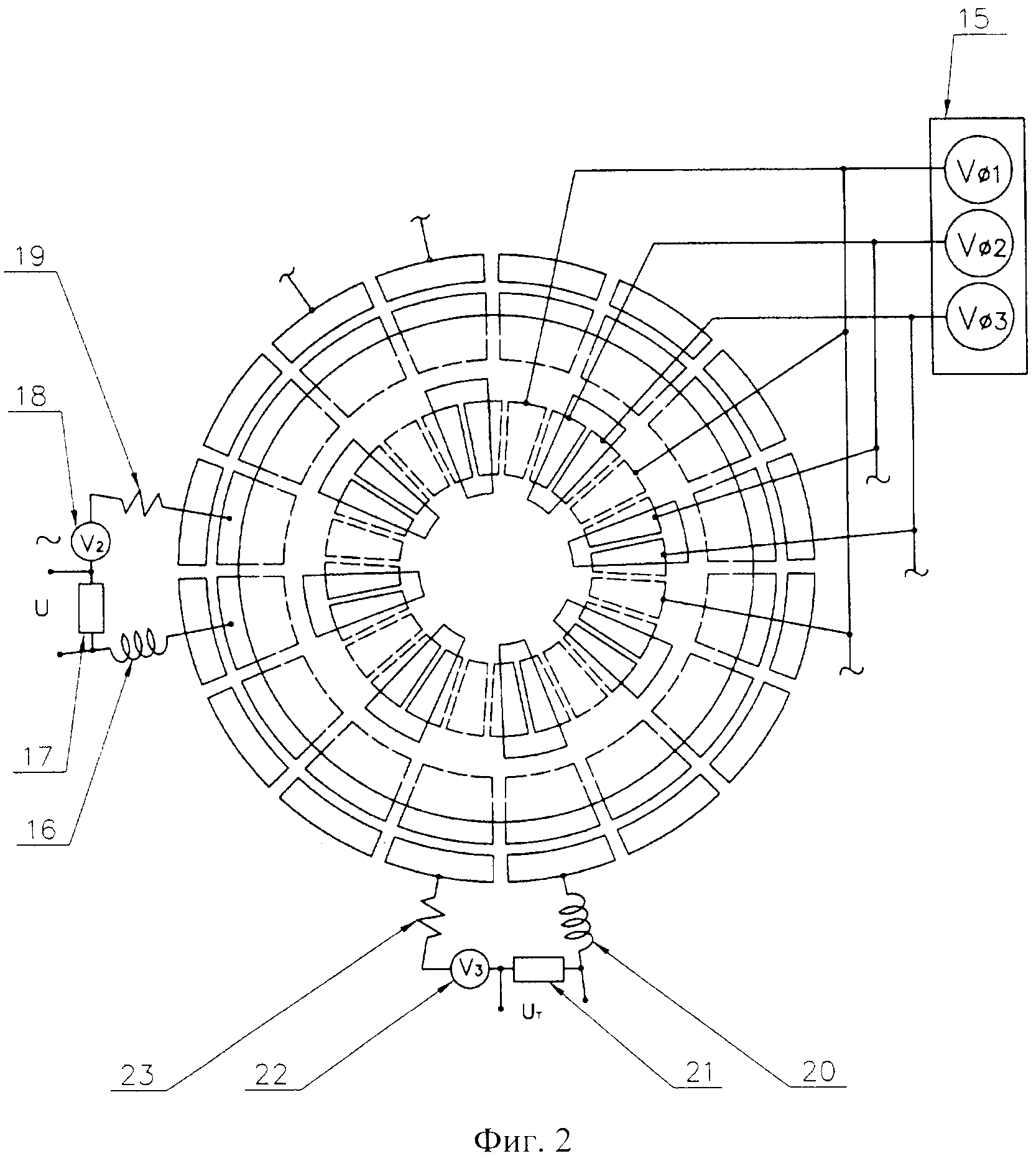
На фиг. 2 изображена часть электрической схемы соединения элементов устройства.
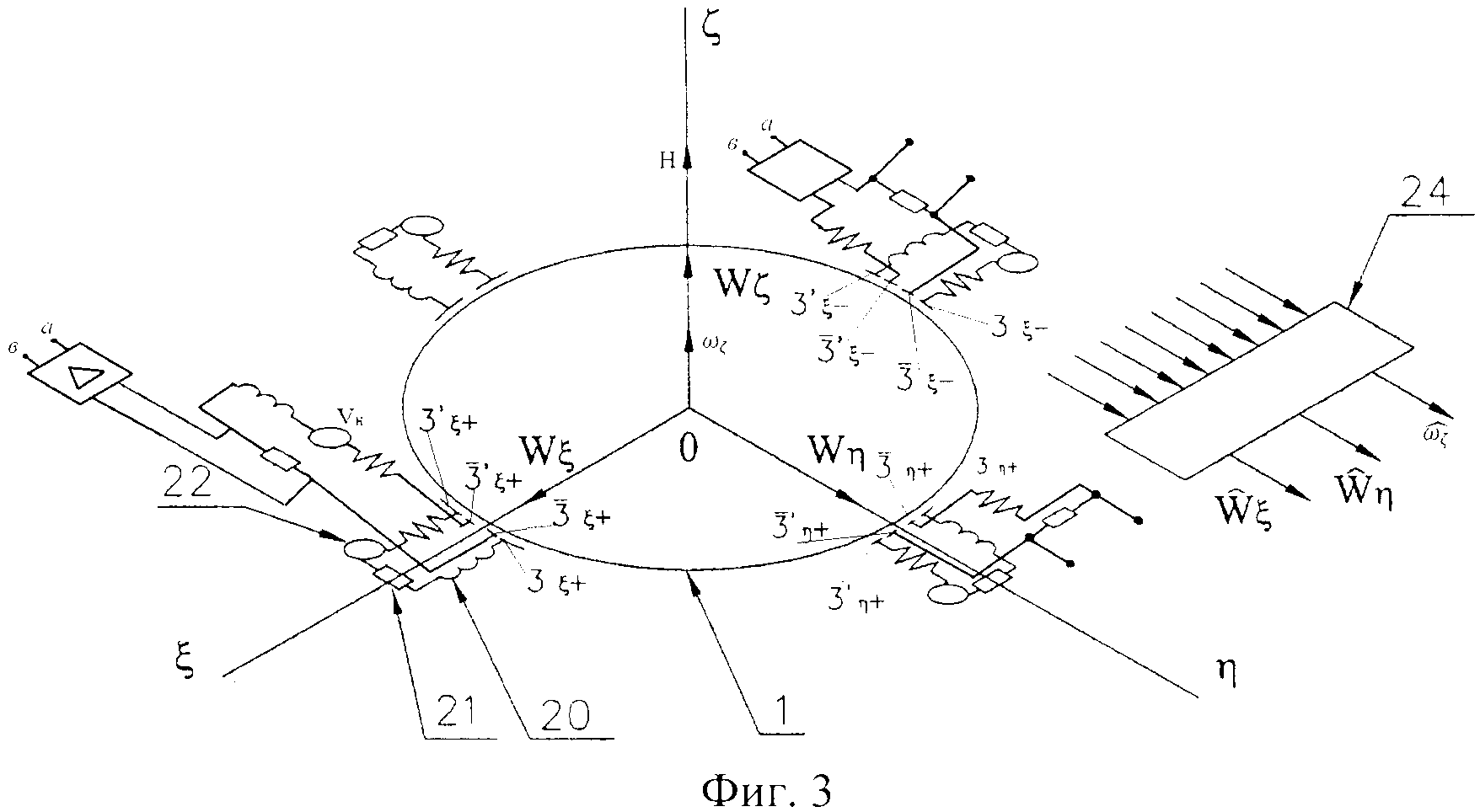
На фиг. 3 представлена поясняющая схема выделения сигнала кажущегося ускорения по двум компонентам, перпендикулярным оси симметрии ротора (Wξ, Wη), а также компонента Wζ абсолютной угловой скорости.
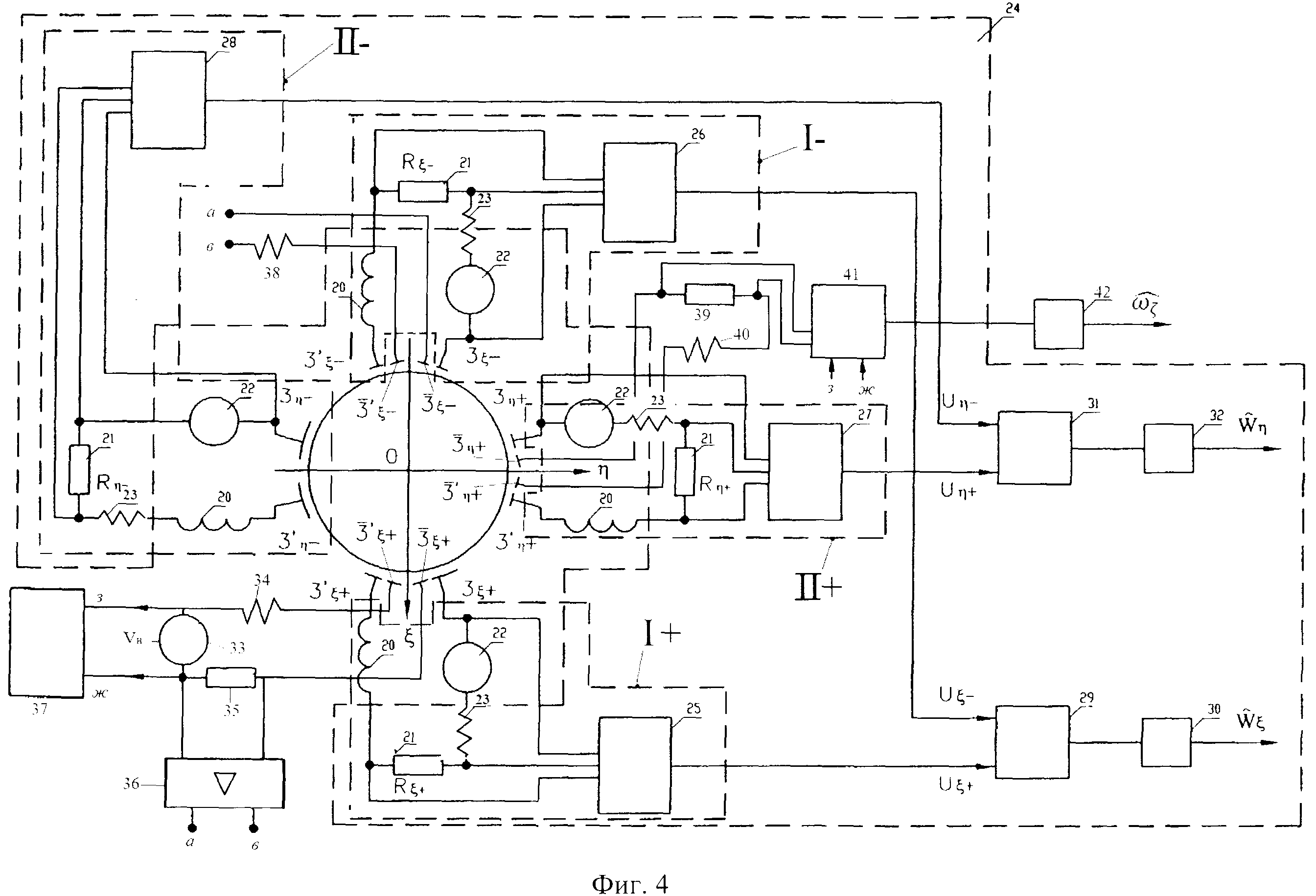
На фиг. 4 представлена функциональная электрическая схема выделения сигналов кажущегося ускорения по компонентам Wζ, Wη и компонента абсолютной угловой скорости ωζ.
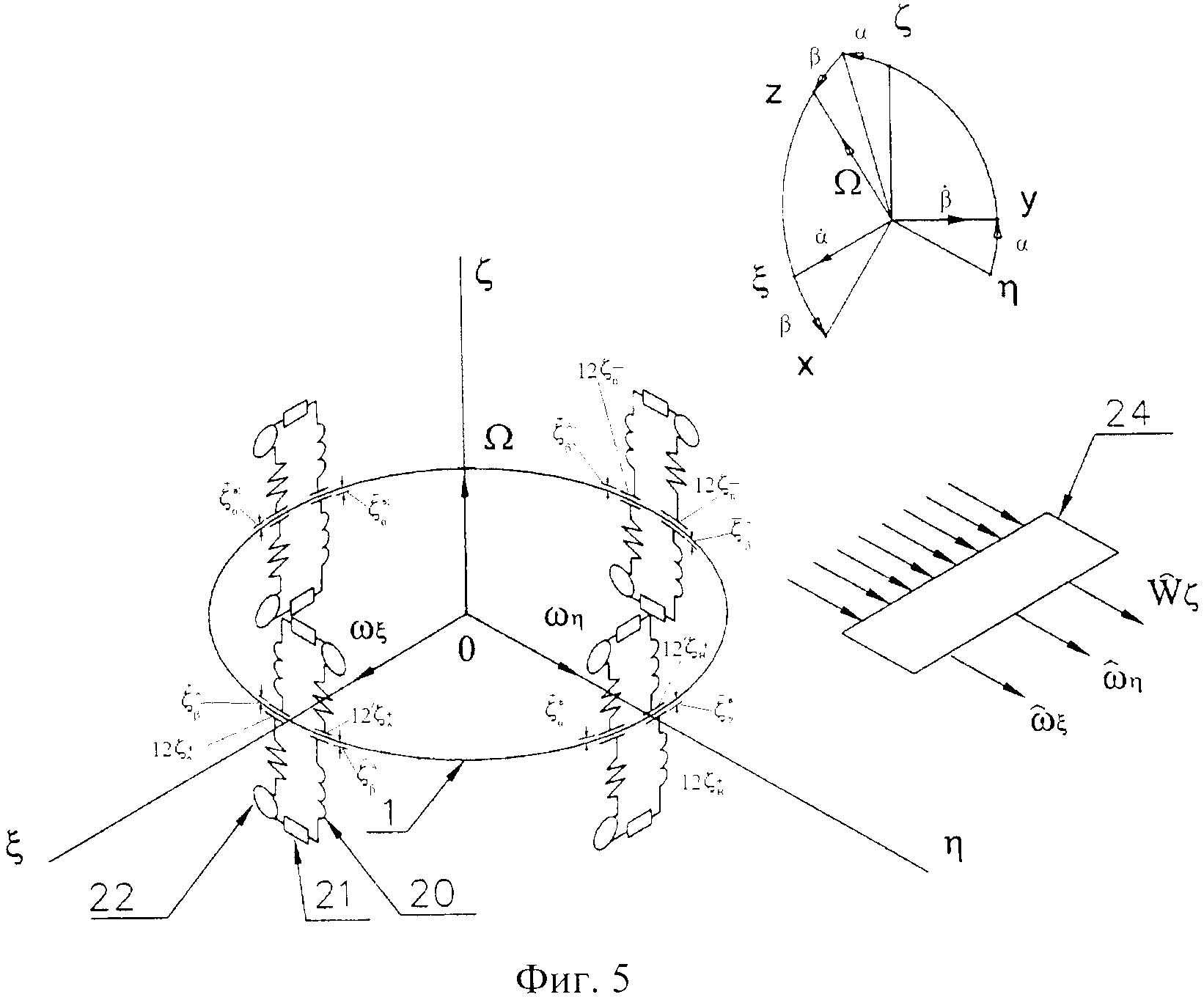
На фиг. 5 представлена схема, поясняющая выделение сигналов по третьему компоненту кажущегося ускорения и по двум компонентам абсолютной угловой скорости (ωξ, ωη), перпендикулярным оси симметрии ротора.
На фиг. 6 представлена функциональная электрическая схема выделения сигналов кажущегося ускорения Wζ и абсолютных угловых скоростей ωζ, ωη и зазора δ.
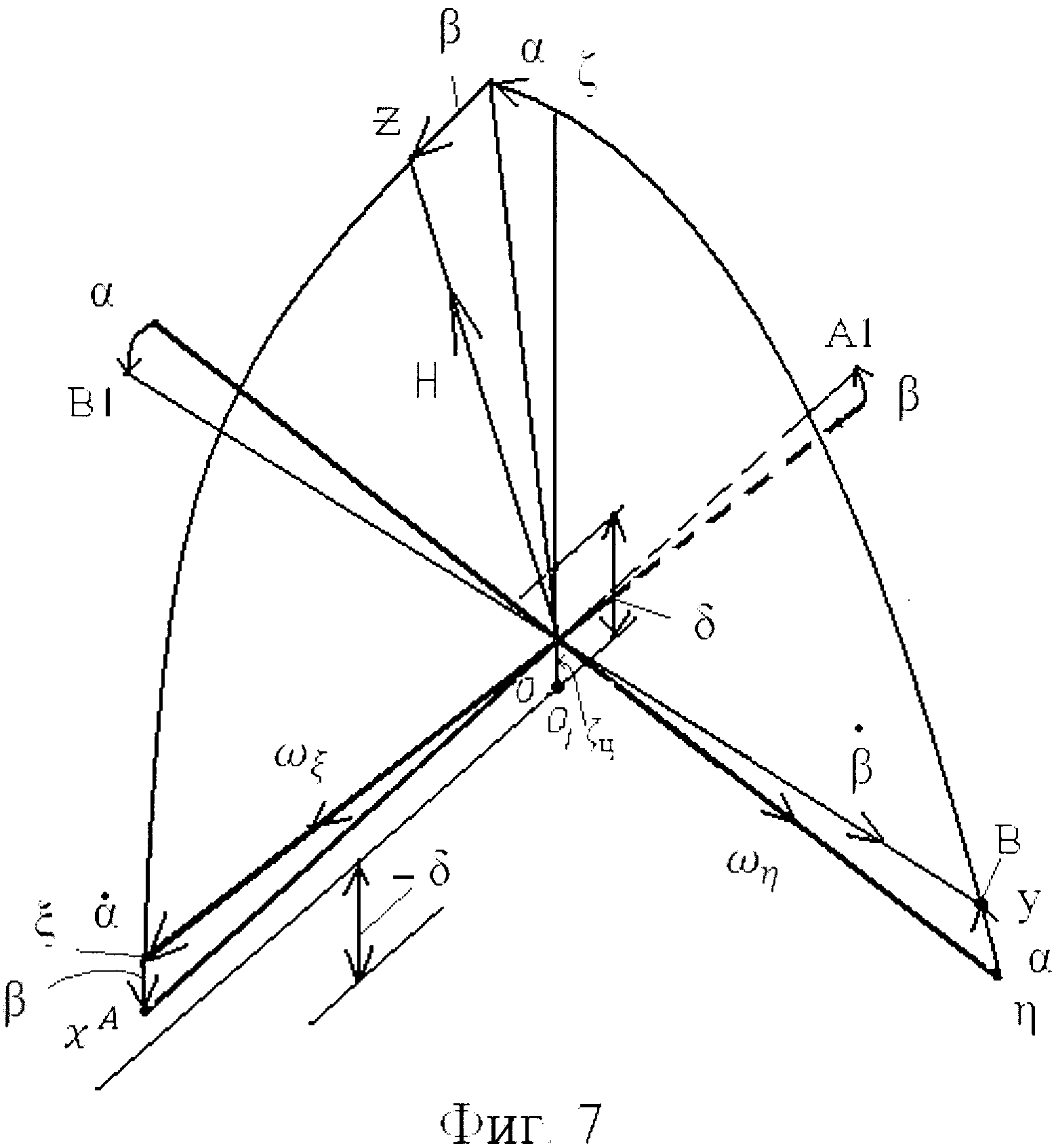
На фиг. 7 - схема поворотов координатных трехгранников и перемещений поворотов ротора относительно корпуса.
На чертежах приняты следующие обозначения: 1 - динамически симметричный ротор, 2 - статор торцевого подвеса, 3 - торцевые электроды, 4 - корпус, 5 - крышка, 6 - установочные поверхности, 7 - юстировочная канавка, 8 - нижняя изолирующая втулка, 9 - верхняя изолирующая втулка, 10 - нижний планарный статор подвеса, 10′ - верхний планарный статор подвеса, 11 - нижний статор вращающего момента, 11′ - верхний статор вращающего момента, 12 - электроды нижнего статора подвеса, 12′ - электроды верхнего статора подвеса, 13а, 13в, 13с - электроды нижнего статора вращающего момента, 14 - отверстия ротора, 15 - источник трехфазного напряжения, 16 - дроссель статора подвеса, 17 - эталонный резистор статора подвеса, 18 - источник высокочастотного напряжения статора подвеса, 19 - эквивалентный резистор распределенного сопротивления статора подвеса, 20 - дроссель торцевых электродов, 21 - эталонный резистор торцевых электродов, 22 - источник высокочастотного напряжения торцевых электродов, 23 - эквивалентный резистор распределенного сопротивления торцевых электродов, 24 - устройство обработки информации, 25 - первый фазочувствительный выпрямитель (ФЧВ), подключенный по положительному направлению оси ξ, 26 - второй ФЧВ, подключенный по отрицательному направлению оси ξ, 27 - третий ФЧВ, подключенный по положительному направлению оси η, 28 - четвертый ФЧВ, подключенный по отрицательному направлению оси η, 29 - первый сумматор напряжений, подключенный по оси ξ, 30 - первый масштабирующий элемент, подключенный по оси ξ, 31 - второй сумматор напряжений, подключенный по оси η, 32 - второй масштабирующий элемент, подключенный по оси η, 33 - источник низкочастотного напряжения UH, 34 - распределенное сопротивление цепи по положительному направлению оси ξ, 35 - эталонный резистор по положительному направлению оси ξ, 36 - фильтр по положительному направлению оси ξ, 37 - стабилизатор напряжения по положительному направлению оси ξ, 38 - распределенное сопротивление цепи по отрицательному направлению оси ξ, 39 - эталонный резистор по положительному направлению оси η, 40 - распределенное сопротивление цепи по положительному направлению оси η, 41 - пятый ФЧВ по положительному направлению оси η, 42 - третий масштабирующий элемент, 43 - эталонный резистор по отрицательному направлению оси η, 44 - источник высокочастотного напряжения по отрицательному направлению оси η, 45 - распределенное сопротивление цепи по отрицательному направлению оси η; 46, 47 - шестой и седьмой ФЧВ для выделения систематических сигналов о текущих зазорах  и
и  между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по второй оси (в отрицательном направлении; 48, 49 - восьмой и девятый ФЧВ для выделения сигналов о текущих зазорах
между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по второй оси (в отрицательном направлении; 48, 49 - восьмой и девятый ФЧВ для выделения сигналов о текущих зазорах  и
и  между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси ξ в отрицательном направлении; 50, 51 - десятый и одиннадцатый ФЧВ для выделения систематических сигналов о текущих зазорах
между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси ξ в отрицательном направлении; 50, 51 - десятый и одиннадцатый ФЧВ для выделения систематических сигналов о текущих зазорах 
 между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в положительном направлении; 52, 53 - двенадцатый и тринадцатый ФЧВ для выделения систематических сигналов о текущих зазорах
между ротором по положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в положительном направлении; 52, 53 - двенадцатый и тринадцатый ФЧВ для выделения систематических сигналов о текущих зазорах 
 между ротором по положительному и отрицательному направлениям оси (по отношению к верхним и нижним электродам, смещенным по оси (в положительном направлении, 54, 55, 56, 58, 59, 60, 67 - соответственно с третьего по девятый сумматоры напряжений; 57, 61, 65 - соответственно с первого по третий устройства вычитания, 62 - четвертый масштабирующий элемент для сигнала
между ротором по положительному и отрицательному направлениям оси (по отношению к верхним и нижним электродам, смещенным по оси (в положительном направлении, 54, 55, 56, 58, 59, 60, 67 - соответственно с третьего по девятый сумматоры напряжений; 57, 61, 65 - соответственно с первого по третий устройства вычитания, 62 - четвертый масштабирующий элемент для сигнала  63 - пятый масштабирующий элемент для сигнала
63 - пятый масштабирующий элемент для сигнала  64 - шестой масштабирующий элемент для сигнала
64 - шестой масштабирующий элемент для сигнала  66 - седьмой масштабирующий элемент для сигнала
66 - седьмой масштабирующий элемент для сигнала  0ζηξ - правая ортогональная система координат, связанная с корпусом 4 устройства; 0ξ - первая измерительная ось, 0η - вторая измерительная ось, 0ζ - третья измерительная ось, Wς, Wη, Wξ - компоненты вектора кажущегося ускорения точки 0 центра тяжести ротора 1, направленные по соответствующим осям системы координат Οζηξ; Ο1 - точка центра подвеса ротора, ωξ - абсолютная угловая скорость ПО вокруг оси ξ; ωη - абсолютная угловая скорость вокруг оси η; ωζ - абсолютная угловая скорость вокруг оси ζ; U, UT - выходные напряжения с эталонного резистора статора подвеса и эталонного резистора торцевых электродов соответственно; I+, I- - контуры электроники по положительному и отрицательному направлениям оси ξ; ΙΙ+, ΙI- - контуры электроники по положительному и отрицательному направлениям оси η; а, в, з, ж - зажимы источников напряжения; 3ξ-, 3ξ+- торцевые электроды для измерения перемещений ротора вдоль оси ξ с отрицательной и положительной координатой расположения по оси η; 3′ξ-, 3′ξ+ - торцевые электроды для измерения перемещений ротора вдоль оси ξ с отрицательной и положительной координатой расположения по оси η;
0ζηξ - правая ортогональная система координат, связанная с корпусом 4 устройства; 0ξ - первая измерительная ось, 0η - вторая измерительная ось, 0ζ - третья измерительная ось, Wς, Wη, Wξ - компоненты вектора кажущегося ускорения точки 0 центра тяжести ротора 1, направленные по соответствующим осям системы координат Οζηξ; Ο1 - точка центра подвеса ротора, ωξ - абсолютная угловая скорость ПО вокруг оси ξ; ωη - абсолютная угловая скорость вокруг оси η; ωζ - абсолютная угловая скорость вокруг оси ζ; U, UT - выходные напряжения с эталонного резистора статора подвеса и эталонного резистора торцевых электродов соответственно; I+, I- - контуры электроники по положительному и отрицательному направлениям оси ξ; ΙΙ+, ΙI- - контуры электроники по положительному и отрицательному направлениям оси η; а, в, з, ж - зажимы источников напряжения; 3ξ-, 3ξ+- торцевые электроды для измерения перемещений ротора вдоль оси ξ с отрицательной и положительной координатой расположения по оси η; 3′ξ-, 3′ξ+ - торцевые электроды для измерения перемещений ротора вдоль оси ξ с отрицательной и положительной координатой расположения по оси η; 
 - дополнительно введенные торцевые электроды для измерения перемещений ротора вдоль оси ξ с положительной координатой вдоль оси ξ; 3η-, 3η+ - торцевые электроды для измерения перемещений ротора вдоль оси η с отрицательной и положительной координатой расположения по оси η; 3′η-, 3′η+ - торцевые электроды для измерения перемещений ротора вдоль оси η с отрицательной и положительной координатой расположения по оси
- дополнительно введенные торцевые электроды для измерения перемещений ротора вдоль оси ξ с положительной координатой вдоль оси ξ; 3η-, 3η+ - торцевые электроды для измерения перемещений ротора вдоль оси η с отрицательной и положительной координатой расположения по оси η; 3′η-, 3′η+ - торцевые электроды для измерения перемещений ротора вдоль оси η с отрицательной и положительной координатой расположения по оси 
 - дополнительно введенные торцевые электроды для измерения перемещений ротора вдоль оси (с положительной координатой вдоль оси ξ; Rξ+, Rξ- - эталонные резисторы, расположенные в цепи измерений по положительному и отрицательному направлениям оси ξ; Rη+, Rη- - эталонные резисторы, расположенные в цепи измерений по положительному и отрицательному направлениям оси η; Uη+, Uη- - выходные напряжения по положительному и отрицательному направлениям оси η; Uξ+, Uξ- - выходные напряжения по положительному и отрицательному направлениям оси ξ, xyz - система координат, жестко связанная с ротором; α, β - углы поворота ротора;
- дополнительно введенные торцевые электроды для измерения перемещений ротора вдоль оси (с положительной координатой вдоль оси ξ; Rξ+, Rξ- - эталонные резисторы, расположенные в цепи измерений по положительному и отрицательному направлениям оси ξ; Rη+, Rη- - эталонные резисторы, расположенные в цепи измерений по положительному и отрицательному направлениям оси η; Uη+, Uη- - выходные напряжения по положительному и отрицательному направлениям оси η; Uξ+, Uξ- - выходные напряжения по положительному и отрицательному направлениям оси ξ, xyz - система координат, жестко связанная с ротором; α, β - углы поворота ротора; 
 - угловые скорости поворота ротора, Ω - угловая скорость собственного вращения ротора;
- угловые скорости поворота ротора, Ω - угловая скорость собственного вращения ротора; 
 - электроды правого нижнего и верхнего соответственно статоров, расположенные по отрицательному направлению оси ζ;
- электроды правого нижнего и верхнего соответственно статоров, расположенные по отрицательному направлению оси ζ; 
 - электроды левого нижнего и верхнего соответственно статоров, расположенные по положительному направлению оси ζ;
- электроды левого нижнего и верхнего соответственно статоров, расположенные по положительному направлению оси ζ; 
 - зазоры между ротором по оси положительному и отрицательному направлениям оси (по отношению к верхним и нижним электродам, смещенным по оси (в положительном направлении;
- зазоры между ротором по оси положительному и отрицательному направлениям оси (по отношению к верхним и нижним электродам, смещенным по оси (в положительном направлении; 
 - зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси ξ в отрицательном направлении;
- зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси ξ в отрицательном направлении; 
 - зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в положительном направлении;
- зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в положительном направлении;
 - зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в отрицательном направлении,
- зазоры между ротором по оси положительному и отрицательному направлениям оси ζ по отношению к верхним и нижним электродам, смещенным по оси η в отрицательном направлении,
Гироскоп-акселерометр (фиг. 1) с электростатическим подвесом ротора и полной первичной информацией содержит динамически и статически сбалансированный симметричный ротор 1, частично или полностью выполненный из электропроводящего материала, например полисиликона. Ротор 1 является плоским, выполненным в виде статически и динамически сбалансированной круглой пластины с отверстиями, его диаметр может лежать в пределах от нескольких десятков микрометров до единиц миллиметров при толщине от единиц до десятков микрометров. Ротор 1 окружен статорами, в состав которых входят торцевой, нижний и верхний планарные статоры подвеса, а также нижний и верхний статоры вращающего момента. В экваториальной плоскости ротора расположен статор подвеса 2, состоящий из четного числа плоских одинаковых торцевых электродов 3, расположенных по окружности и выполненных с возможностью создания электростатических сил для удержания ротора 1 вдоль осей 0ξ и 0η, связанных с корпусом 4 устройства. На корпусе 4 установлена крышка 5. Поверхности 6 вместе с юстировочной канавкой 7 обеспечивают совмещение измерительных осей 0ζ, 0η, 0ξ устройства с соответствующими строительными осями подвижного объекта 0ζηξ, на котором устройство устанавливается. Корпус 4 и крышку 5 изготавливают, например, из пирекса или из другого электроизолирующего материала. Плоские торцевые электроды 3 статора подвеса 2 закреплены в боковых стенках нижней изолирующей втулки 8, расположенной в основании корпуса 4. В крышке 5 имеется верхняя электрически изолирующая втулка 9, имеющая одинаковый внутренний диаметр с диаметром нижней втулки 8. В описании полезной модели электрические выводы, а также соединительные провода и клеммы, элементы крепления не показаны. С внутренними плоскими частями нижней и верхней втулок 8, 9 соединены нижний и верхний 10 и 10′ соответственно планарные статоры подвеса, а также нижний и верхний 11 и 11′ соответственно статоры вращающего момента. Статоры имеют одинаковую планарную конструкцию, состоят из четного числа электродов - электродов 12 нижнего статора подвеса 10 и таких же электродов 12′ верхнего статора 10′ (на виде в плане (сечение ВВ) не показаны), а также из электродов 13 (13а, 13b, 13с, …) нижнего статора 11 вращающего момента. Такие же электроды, являющиеся зеркальным отображением нижних относительно плоскости 0ξη, входят в состав верхнего статора 11′ вращающего момента. Статоры 10, 10′ , 11, 11′ могут быть выполнены фотолитографическим способом на электроизолирующих нижней и верхней втулках 8 и 9 соответственно. Таким же способом могут быть изготовлены торцевые электроды 3 статора подвеса 2. На роторе 1 выполнены отверстия 14, необходимые для обеспечения условий создания вращающего момента.
На фиг. 2 изображена часть схемы включения гироскопа-акселерометра с электростатическим подвесом ротора. При этом источник трехфазного напряжения 15, где с первой фазой Vф1 соединен первый электрод 13а нижнего статора вращающего момента 11, а также все остальные электроды 13а через два на третий нижнего и верхнего соответственно статоров 11 и 11′ вращающего момента, со второй фазой Vф2 соединен первый электрод 13b и все другие электроды 13b через два на третий от него, с фазой Vф3 соединен первый электрод 13с и все другие электроды 13с через два на третий. Пара плоских соседних электродов 12 как нижнего, так и верхнего 10 и 10′ соответственно статоров подвеса соединены через дроссель 16 статора подвеса и эталонный резистор 17 статора подвеса с источником высокочастотного напряжения 18 (~V2). При этом в замкнутую цепь входит электроды 12, эквивалентный резистор 19, являющийся эквивалентом активного распределенного сопротивления дросселя 16, источника высокочастотного напряжения 18 и конденсаторов, образованных промежутками ротора 1. Аналогичные соединения выполнены для пластин 12′ верхнего статора подвеса. Подобные соединения для соседних торцевых электродов 3 статора 2 изображено на фиг. 2. Они соединены через дроссель торцевых электродов 20 и эталонный резистор 21 торцевых электродов с источником высокочастотного напряжения 22, эталонный резистор 23 является эквивалентом активного сопротивления резонансной цепи. Напряжения U, UT являются выходными: зажимы эталонных резисторов 17 и 21 соединены с соответствующими входами ФЧВ 25, 26, 27 и 28 устройства обработки информации 24.
Части схем фиг. 2-6, каждая из которых состоит из двух торцевых электродов 3 (соседних или перемеженных), последовательно соединенных с эталонным резистором 21, дросселем торцевых электродов 20, эквивалентным резистором 23, источником высокочастотного напряжения 22, ФЧВ 25, 26, 27 и 28, будем называть измерительными цепочками (для торцевых электродов по оси Ο (номера 17, 16, 19, 18 соответственно; в тексте применяется указанная выше первая нумерация, т.е. 21, 20, 23, 22). При этом на один вход каждого ФЧВ параллельно подключены зажимы источника высокочастотного напряжения 22 торцевых электродов, на другой вход - зажимы от эталонного резистора 21 торцевых электродов, а его выход является выходом измерительной цепочки.
По сравнению с прототипом в данном приборе дополнительно введены три измерительные цепочки. Каждой измерительной цепочке присваивается номер 3, 3′ для торцевых и 12, 12′ - для нижних и верхних соответственно планарных электродов. Справа от числа следует греческая буква, означающая направление оси измерения (ξ, η, ζ), справа от нее знак "+" или "-" - знак зазора по соответственно положительному или отрицательному направлению соответствующей оси измерения. Нижние греческие буквы α, β или русские н, в означают угол, для определения которого производится измерение и производится оно снизу или сверху от ротора соответственно.
Первая цепочка, состоящая из дополнительных электродов 
 элементов 26, 20, 21 и 22, выполнена с возможностью измерения перемещения ротора 1 по оси ξ. Вторая цепочка, состоящая из электродов
элементов 26, 20, 21 и 22, выполнена с возможностью измерения перемещения ротора 1 по оси ξ. Вторая цепочка, состоящая из электродов 
 элементов 20, 21, 22, 27, выполнена с возможностью измерения перемещений ротора 1 вдоль оси η. Третья измерительная и силовая цепочка, состоящая из электродов
элементов 20, 21, 22, 27, выполнена с возможностью измерения перемещений ротора 1 вдоль оси η. Третья измерительная и силовая цепочка, состоящая из электродов 
 , элементов 33, 34, 35 и 37, выполнена с возможностью возбуждения низкочастотных колебаний ротора 1 с круговой частотой ΩΒ и измерения параметров этих колебаний с выделением посредством фильтра 36 постоянной составляющей перемещения по оси ξ. Дополнительные электроды выполнены одинаковой конструкции с основными.
, элементов 33, 34, 35 и 37, выполнена с возможностью возбуждения низкочастотных колебаний ротора 1 с круговой частотой ΩΒ и измерения параметров этих колебаний с выделением посредством фильтра 36 постоянной составляющей перемещения по оси ξ. Дополнительные электроды выполнены одинаковой конструкции с основными.
На фиг. 4 показаны контуры I+ и I- - это измерительные цепочки для измерения зазоров в торцевых электродах с положительными и отрицательными координатами их расположения вдоль оси ξ.
Аналогично электроды 3η+ и 3′η+ с положительными координатами по второй измерительной оси (т.е. оси 0η) соединены в свою измерительную цепочку ΙΙ+, электроды 3η- и 3′η- с отрицательными координатами расположения по измерительной оси 0η соединены в свою измерительную цепочку II-.
На фиг. 4 выделяются шесть измерительных цепочек.
В приборе, как указано выше, дополнительно введены 6 силовых торцевых электродов 3 на корпусе и роторе (фиг. 4) - два электрода: 
 два электрода:
два электрода: 
 два электрода
два электрода 
 Кроме того, введена схема задания гармонического низкочастотного напряжения UH на пластины-электроды
Кроме того, введена схема задания гармонического низкочастотного напряжения UH на пластины-электроды 
 являющаяся первой дополнительно введенной измерительной цепочкой. Она предназначена для возбуждения колебаний ротора 1 по оси Οξ и состоит из источника 33 указанного низкочастотного напряжения, из распределенного сопротивления цепи 34 по положительному направлению оси ξ, эталонного резистора 35 по положительному направлению оси ξ, фильтра 36 по положительному направлению оси ξ, стабилизатора напряжения 37 по положительному направлению оси ξ. В нее входит схема компенсации постоянного смещения ротора 1 вдоль оси Οξ, состоящая из зажимов а и в, связанных с выходами а и в, фильтра 36 по положительному направлению оси ξ, распределенного сопротивления 34 по положительному направлению оси ξ, эталонного резистора 35 по положительному направлению оси ξ и торцевых электродов
являющаяся первой дополнительно введенной измерительной цепочкой. Она предназначена для возбуждения колебаний ротора 1 по оси Οξ и состоит из источника 33 указанного низкочастотного напряжения, из распределенного сопротивления цепи 34 по положительному направлению оси ξ, эталонного резистора 35 по положительному направлению оси ξ, фильтра 36 по положительному направлению оси ξ, стабилизатора напряжения 37 по положительному направлению оси ξ. В нее входит схема компенсации постоянного смещения ротора 1 вдоль оси Οξ, состоящая из зажимов а и в, связанных с выходами а и в, фильтра 36 по положительному направлению оси ξ, распределенного сопротивления 34 по положительному направлению оси ξ, эталонного резистора 35 по положительному направлению оси ξ и торцевых электродов 

Аналогично, по отрицательному значению координаты первой измерительной оси 0ξ, диаметрально расположенного к дополнительно введенным электродам 
 введены электроды (с возможностью создания постоянной силы, компенсирующей ее от воздействия UH)
введены электроды (с возможностью создания постоянной силы, компенсирующей ее от воздействия UH) 
 распределенное сопротивление цепи 38 по положительному направлению оси ξ, зажимы а, в схемы I-. При этом выходы этих измерительных цепочек с положительными и отрицательными координатами торцевых электродов подвеса первой измерительной оси 0ξ соединены с первым и вторым входами соответственно первого сумматора, 29 выход которого соединен с входом первого масштабирующего элемента 30, выход которого является выходом по компоненту Wξ кажущегося ускорения.
распределенное сопротивление цепи 38 по положительному направлению оси ξ, зажимы а, в схемы I-. При этом выходы этих измерительных цепочек с положительными и отрицательными координатами торцевых электродов подвеса первой измерительной оси 0ξ соединены с первым и вторым входами соответственно первого сумматора, 29 выход которого соединен с входом первого масштабирующего элемента 30, выход которого является выходом по компоненту Wξ кажущегося ускорения.
Выход третьего ФЧВ 27, подключенного по положительному направлению оси η, и выход четвертого ФЧВ 28, подключенного по отрицательному направлению оси η, являющиеся выходами измерительных цепочек торцевых электродов подвеса с положительными и отрицательными координатами соответственно по второй измерительной оси, соединены с первым и вторым входами второго сумматора напряжений 31, выход которого соединен со входом второго масштабирующего элемента 32, выход которого является выходом по компоненту Wη кажущегося ускорения в виде оценки 
Введена также измерительная цепочка ΙI+, выполненная с возможностью измерения колебаний ротора вдоль второй измерительной оси Οη и оценки выходного сигнала  по третьему компоненту угловой скорости ПО, содержащая две пары диаметрально расположенных торцевых электродов 3′ξ-,
по третьему компоненту угловой скорости ПО, содержащая две пары диаметрально расположенных торцевых электродов 3′ξ-,  и 3′ξ+,
и 3′ξ+,  пару электродов
пару электродов 
 с подключенным к ним эталонным резистором 39 по положительному направлению оси η, распределенное сопротивление 40 этой цепочки по положительному направлению оси η, пятый ФЧВ 41 по положительному направлению оси η, входы которого соединены с фильтром 36, а выход с третьим масштабирующим элементом 42, выход которого служит для съема информации по третьему компоненту
с подключенным к ним эталонным резистором 39 по положительному направлению оси η, распределенное сопротивление 40 этой цепочки по положительному направлению оси η, пятый ФЧВ 41 по положительному направлению оси η, входы которого соединены с фильтром 36, а выход с третьим масштабирующим элементом 42, выход которого служит для съема информации по третьему компоненту  угловой скорости подвижного объекта.
угловой скорости подвижного объекта.
На фиг. 5, 6 представлены 8 измерительных цепочек, аналогичных по структуре. Каждая состоит из пары пластинок-электродов 12ζ с соответствующими индексами, дросселя 20, эталонного резистора 43 по отрицательному направлению оси η, источника высокочастотного напряжения 44 по отрицательному направлению оси η, распределенного сопротивления 45 по отрицательному направлению оси η. Зажимы 0, II эталонного резистора 43 и зажимы 0, I источника высокочастотного напряжения 44 соединены с первым и вторым входами соответствующих фазочувствительных выпрямителей 46-53 (ФЧВ). Номера указаны для элементов только одной измерительной цепочки, в остальных - такие же номера элементов. Выходами измерительных цепочек являются выходы ФЧВ 46-53.
Выходы шестого и седьмого ФЧВ 46 и 47 для выделения систематических сигналов о текущих зазорах  и
и  между ротором по оси положительному и отрицательному направлениям оси ξ по отношению к верхним и нижним электродам, смещенным по оси η в отрицательном направлении, подключены к входам четвертого сумматора напряжений 55. Выходы восьмого и девятого ФЧВ 48 и 49 для выделения систематических сигналов о текущих зазорах
между ротором по оси положительному и отрицательному направлениям оси ξ по отношению к верхним и нижним электродам, смещенным по оси η в отрицательном направлении, подключены к входам четвертого сумматора напряжений 55. Выходы восьмого и девятого ФЧВ 48 и 49 для выделения систематических сигналов о текущих зазорах  и
и  по положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси ξ в отрицательном направлении, подключены к входам шестого и восьмого сумматоров напряжений 58 и 60. Выходы десятого и одиннадцатого ФЧВ 50 и 51 для выделения систематических сигналов о текущих зазорах
по положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси ξ в отрицательном направлении, подключены к входам шестого и восьмого сумматоров напряжений 58 и 60. Выходы десятого и одиннадцатого ФЧВ 50 и 51 для выделения систематических сигналов о текущих зазорах 
 по оси положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси η в положительном направлении, подключены к пятому сумматору напряжений 56. Выходы двенадцатого и тринадцатого ФЧВ 52 и 53 для выделения систематических сигналов о текущих зазорах
по оси положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси η в положительном направлении, подключены к пятому сумматору напряжений 56. Выходы двенадцатого и тринадцатого ФЧВ 52 и 53 для выделения систематических сигналов о текущих зазорах 
 по положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси ξ в положительном направлении, подключены к седьмому сумматору напряжений 59. При этом одновременно выходы девятого и тринадцатого ФЧВ 49 и 53 подключены к двум входам третьего сумматора напряжений 54.
по положительному и отрицательному направлениям оси ζ между ротором и верхним и нижним электродами, смещенными по оси ξ в положительном направлении, подключены к седьмому сумматору напряжений 59. При этом одновременно выходы девятого и тринадцатого ФЧВ 49 и 53 подключены к двум входам третьего сумматора напряжений 54.
Выходы четвертого и пятого сумматоров напряжений 55 и 56 соединены с входами первого устройства вычитания 57, так что из сигнала четвертого сумматора напряжений 55 вычитают сигнал пятого сумматора напряжений 56. Выход первого устройства вычитания 57 соединен со входом четвертого масштабирующего элемента 62, выходом которого является оценка  компонента
компонента  угловой скорости ПО.
угловой скорости ПО.
Выходы шестого и седьмого сумматоров напряжений 58 и 59 соединены со входом девятого сумматора напряжений 67, выход которого соединен со входом шестого масштабирующего элемента 64, выходом которого является оценка 
Выход седьмого сумматора напряжений 59 соединен со входом второго устройства вычитания 61, инвертирующий вход которого соединен с выходом шестого сумматора напряжений 58. Выход пятого масштабирующего устройства 63, вход которого соединен с выходом второго устройства вычитания 61, пропорционален оценке  угловой скорости ПО.
угловой скорости ПО.
Вход третьего устройства вычитания 65 соединен с выходом третьего сумматора напряжений 54, инвертирующий его вход соединен с выходом восьмого сумматора напряжений 60. Выход третьего устройства вычитания 65 соединен со входом седьмого масштабирующего устройства 66, выходом которого является напряжение, пропорциональное оценке зазора 
Работает гироскоп-акселерометр с электростатическим подвесом ротора следующим образом. Перед включением питания прибор устанавливают на корпусе ПО, ориентируют его с помощью установочных поверхностей 6 и юстировочной канавки 7, затем закрепляют винтами через отверстия ротора 14. При включении питающих источников высокочастотных напряжений статоры 18 (22) подвеса 2, 3, 10, 10′, 12 и 12′ устанавливают ротор 1 в исходное положение, т.е. ротор 1 начинает левитировать (парить) относительно статоров под действием устанавливающих электростатических сил. Крышка 5 вместе с корпусом 4 и нижней и верхней изолирующими втулками 8, 9 обеспечивают герметичность внутренней полости устройства. После этого устройство обработки информации 24 подключает питающее трехфазное напряжение к верхнему 11′ и нижнему 11 статорам вращающего момента. Под действием тангенциальных электростатических сил от электродов 13а, 13в, 13с нижнего статора подвеса и отверстий 14 ротор 1 разгоняется и приобретает угловую скорость Ω и кинетический момент Н, равный Н=JΩ, где J - полярный момент инерции ротора 1. При движении ПО возникают кажущиеся ускорения Wζ, Wη, Wξ и абсолютные угловые скорости ωζ, ωη, ωξ, которые измеряются заявляемым прибором.
При движении ПО с ускорениями Wξ, Wη возникают инерционные силы, которые в установившемся режиме уравновешиваются результирующими силами Fξ, Fη электростатического подвеса. В итоге получаем:

где m - масса ротора.
С одной стороны, силы Fξ, Fη пропорциональны приращениям напряжений между электродами статора и ротора Ιξ, Ιη, протекающим через электроды подвеса в каждой соответствующей паре. С другой стороны, эти токи пропорциональны при линейности характеристики подвеса, имеющей место для малых перемещений, перемещениям (и η:

где Κξ, Κη - коэффициенты жесткости подвеса по соответствующим осям.
Из (1) и (2) имеем:

Формулы (3) образуют алгоритм пересчета сигналов о соответствующих перемещениях ξ и η ротора 1 относительно исходного положения в сигналы кажущихся ускорений. Ниже они выражаются через напряжения.
Из фиг. 4 и фиг. 6 следует, что сигналы о перемещениях по координате ξ получают по напряжению Uξ+ на выходе ФЧВ 25 по положительному направлению оси ξ измерительной цепочки Ι+, включающей электроды 3ξ + и 3′ξ+ и состоящей из элементов 20, 21, 22 торцевого статора подвеса 3, а также по напряжению Uζ- с выхода ФЧВ 26 аналогичной измерительной цепочки, включающей аналогичные элементы 20, 21, 22, 23 (на фиг. 2 обозначены 16, 17, 18, 19). На выходе сумматора напряжений 29, на входы которого поступают сигналы от первого и второго ФЧВ 25 и 26, имеет место напряжение Uξ, равное:

После первого масштабирующего элемента 30 получают оценку компонента  кажущегося ускорения
кажущегося ускорения

где χξ - коэффициент передачи измерительной цепочки по оси Οξ ротора.
На ускорение Wη реагируют измерительные цепочки II+ и II-. Аналогично с выхода второго сумматора напряжений 31, на вход которого поступают сигналы от третьего и четвертого ФЧВ 27 и 28, имеет место напряжение Uη, равное Uη=Uη--Uη+, которое на выходе второго масштабирующего элемента 32 преобразуют в оценку  компонента Wη кажущегося ускорения:
компонента Wη кажущегося ускорения:

где χη - коэффициент передачи измерительной цепочки по оси Ο(ротора.
Поясним процесс определения сигнала об угловой скорости ωζ (фиг. 4) (Теоретическая предпосылка изложена в статье - Журавлев В.Ф. Бесплатформенная инерциальная навигационная система маятникового типа (БИНС МТ) // Изв - РАН. МТТ., 2014, №1, с. 6-17.). Для этого от источника 33 гармонического низкочастотного напряжения UH, амплитуду которого стабилизируют стабилизатором напряжения 37, через распределенное сопротивление 34 по положительному направлению оси ξ и эталонный резистор 35 по положительному направлению оси ξ сигнал переменного напряжения подводят к торцевым электродам 3ξ+ и 3′ξ+, который возбуждает колебания ротора 1 вдоль оси Οξ через силы электростатического взаимодействия Fξ.
При подведении к указанным электродам напряжения UH=Ua sinΩвt за счет электростатических сил возникают колебания ротора, что следует из уравнения движения

В установившемся режиме движение ротора определяется по формулам


где Ua - амплитуда; ΩΒ - частота напряжения возбуждения; С - емкость между двумя последовательно соединенными соседними электродами с промежутками электрод - ротор; lo - начальный торцевой зазор; Ω0 - частота собственных недемпфированных колебаний ротора вдоль оси Οξ; h - показатель затухания; kξ - коэффициент жесткости подвеса; φ - фазовый сдвиг между координатой колебаний ротора вдоль оси Οξ и напряжением UH, n - коэффициент демпфирования.
Наличие постоянного смещения ротора 1 устраняют частью схемы, содержащей фильтр 36 по положительному направлению оси ξ, зажимы а, в и последовательно соединенные распределенное сопротивление 38, а также электроды 
 создающие постоянную электростатическую компенсирующую силу.
создающие постоянную электростатическую компенсирующую силу.
Сила Кориолиса, возникающая за счет взаимодействия относительной скорости ξ и угловой скорости ωζ и массы ротора m, равна:

Она является за счет  периодической и вызывает колебания ротора вдоль второй измерительной оси Οη, воспринимаемые электродами. Амплитуда колебаний пропорциональна величине, а сдвиг фазы несет информацию о знаке этой скорости. Амплитуда и фазовый сдвиг φ колебаний по ξ определяют с помощью сигналов электродов
периодической и вызывает колебания ротора вдоль второй измерительной оси Οη, воспринимаемые электродами. Амплитуда колебаний пропорциональна величине, а сдвиг фазы несет информацию о знаке этой скорости. Амплитуда и фазовый сдвиг φ колебаний по ξ определяют с помощью сигналов электродов 
 с помощью второго ФЧВ 26.
с помощью второго ФЧВ 26.
Сигналы с электродов  и
и  через эталонный резистор 39 и распределенное сопротивление 40 по положительному направлению оси η подводят к одним входам, а опорное напряжение UH от зажимов ж, з - к другим входам пятого ФЧВ 41. Его выход соединен со входом третьего масштабирующего элемента 42, выходом которого является оценка
через эталонный резистор 39 и распределенное сопротивление 40 по положительному направлению оси η подводят к одним входам, а опорное напряжение UH от зажимов ж, з - к другим входам пятого ФЧВ 41. Его выход соединен со входом третьего масштабирующего элемента 42, выходом которого является оценка  соответствующего компонента ωζ угловой скорости ПО.
соответствующего компонента ωζ угловой скорости ПО.
Фильтр 36 по положительному направлению оси ξ вырабатывает постоянное напряжение, которое через зажимы а, в и распределенное сопротивление 38 подводят к электродам 
 прикладывающим постоянную силу, компенсирующую противоположно направленную силу от электродов:
прикладывающим постоянную силу, компенсирующую противоположно направленную силу от электродов: 

Принцип выделения сигналов по ускорению Wζ, угловым скоростям ωξ, ωη поясняется фиг. 5 и фиг. 6, 7.
Ускорение объекта вдоль оси 0ζ приводит к появлению инерционной силы, которая уравновешивается электростатическими силами, так что имеем

где Κζ - коэффициент жесткости электростатического подвеса ротора 1 вдоль оси 0ζ. Если объект, а следовательно, корпус 4 вращается с угловыми скоростями ωξ, ωη, то возникающие вследствие этого гироскопические моменты уравновешиваются моментами сил Μ(и Μ(электростатического подвеса:

где kα, kβ - коэффициенты жесткости подвеса по соответствующим углам отклонения ротора 1 из исходного положения, что видно из фиг. 5, 6, 7.
Реализация приведенных соотношений поясняется на основе фиг. 5, и фиг. 6 с помощью восьми измерительных цепочек, содержащих восемь пар электродов от  до
до  включенных последовательно с элементами 42, 43, 44, 45. Сигналы с их выходов подают на ФЧВ с 46 по 53.
включенных последовательно с элементами 42, 43, 44, 45. Сигналы с их выходов подают на ФЧВ с 46 по 53.
Сигналы пар электродов 12 и 12′ нижнего и верхнего статоров подвеса 10 и 10′ соответственно, симметричных относительно осей 0ζ и 0η, содержат в себе информацию о перемещениях ζ и углах поворота ротора α и β и, следовательно, об измеряемых параметрах движения ωξ, ωη, Wζ. Вычисляя суммы и разности сигналов с выходов измерительных цепочек, содержащих пары электродов, расположенных с положительными и отрицательными координатами 0ζ и 0η, получают необходимую информацию о ωξ, ωη, Wζ.
Изменяющиеся за счет перемещения ротора ξ вдоль оси οζ и поворотов α, β между подвижными электродами ротора и неподвижными нижними и верхними электродами статоров в точках А, А1, В, В1 зазоры описывают следующими соотношениями:
- для нижних электродов (фиг. 7)
- для верхних электродов (фиг. 7)

Рассмотрим работу элементов схемы фиг. 6, используемых для определения ускорения Wζ. С учетом схемы фиг. 7 перемещений и поворотов ротора 1, а также формул (11), (12), отмечаем, что напряжение с эталонного резистора 21, пропорционально изменяющемуся зазору  (формула 4d) между зазором и соответствующей парой верхних плоских электродов
(формула 4d) между зазором и соответствующей парой верхних плоских электродов  смещенных от ПО вдоль оси οη, поступает на вход О, II шестого ФЧВ 46, а на вход О, I поступает опорное напряжение от источника высокочастотного напряжения 22. С выхода шестого ФЧВ 46 выпрямленное напряжение поступает на один из входов четвертого сумматора 55. На его второй вход поступает выпрямляющее напряжение с седьмого ФЧВ 47, на вход О, II которого подают напряжение с эталонного резистора 43, пропорциональное переменному зазору
смещенных от ПО вдоль оси οη, поступает на вход О, II шестого ФЧВ 46, а на вход О, I поступает опорное напряжение от источника высокочастотного напряжения 22. С выхода шестого ФЧВ 46 выпрямленное напряжение поступает на один из входов четвертого сумматора 55. На его второй вход поступает выпрямляющее напряжение с седьмого ФЧВ 47, на вход О, II которого подают напряжение с эталонного резистора 43, пропорциональное переменному зазору  (формула 3d). В свою очередь, напряжение с эталонных резисторов, сигналы которых пропорциональны
(формула 3d). В свою очередь, напряжение с эталонных резисторов, сигналы которых пропорциональны  и
и  поступают на входы О, II десятого и одиннадцатого ФЧВ 50 и 51 соответственно, а сигналы с их входов суммируются в пятом сумматоре напряжений 56. Сигнал с выхода четвертого сумматора напряжений 55 поступает на основной, а сигнал с выхода пятого сумматора 56 поступает на инвертирующий вход первого устройства вычитания 57, с выхода которого напряжение подводят к четвертому масштабирующему элементу 62 в соответствии с алгоритмом:
поступают на входы О, II десятого и одиннадцатого ФЧВ 50 и 51 соответственно, а сигналы с их входов суммируются в пятом сумматоре напряжений 56. Сигнал с выхода четвертого сумматора напряжений 55 поступает на основной, а сигнал с выхода пятого сумматора 56 поступает на инвертирующий вход первого устройства вычитания 57, с выхода которого напряжение подводят к четвертому масштабирующему элементу 62 в соответствии с алгоритмом:

где  - оценка угла α; R - радиус неподвижных электродов.
- оценка угла α; R - радиус неподвижных электродов.
В четвертом масштабирующем элементе 62 вычисляют оценку  компонента ωξ угловой скорости ПО по алгоритму, следующему из уравнений (10):
компонента ωξ угловой скорости ПО по алгоритму, следующему из уравнений (10):

где Kα - коэффициент жесткости электростатического подвеса по углу α. Сигнал  является оценкой абсолютных угловых скоростей объекта по компоненту ωξ.
является оценкой абсолютных угловых скоростей объекта по компоненту ωξ.
В работе прибора по определению компонента угловой скорости ωη участвуют электроды для измерения переменных зазоров  смещенные вдоль оси οξ относительно центра подвеса в положительном и отрицательном направлениях на величину R. Напряжения с эталонных резисторов, пропорциональные указанным выше зазорам, подаются на входы О, II пар восьмого и девятого ФЧВ 48, 49, а также двенадцатого и тринадцатого ФЧВ 52,53. Напряжения выходов восьмого и девятого ФЧВ 48, 49 поступают на входы шестого сумматора напряжений 58, а сигнал с его выхода поступает на инвертирующий вход второго устройства вычитания 61. Выходы пары двенадцатого и тринадцатого ФЧВ 52, 53 поступают на входы седьмого сумматора напряжений 59, а его выходной сигнал поступает на прямой вход второго устройства вычитания 61. На его выходе сигнал пропорционален оценке угла
смещенные вдоль оси οξ относительно центра подвеса в положительном и отрицательном направлениях на величину R. Напряжения с эталонных резисторов, пропорциональные указанным выше зазорам, подаются на входы О, II пар восьмого и девятого ФЧВ 48, 49, а также двенадцатого и тринадцатого ФЧВ 52,53. Напряжения выходов восьмого и девятого ФЧВ 48, 49 поступают на входы шестого сумматора напряжений 58, а сигнал с его выхода поступает на инвертирующий вход второго устройства вычитания 61. Выходы пары двенадцатого и тринадцатого ФЧВ 52, 53 поступают на входы седьмого сумматора напряжений 59, а его выходной сигнал поступает на прямой вход второго устройства вычитания 61. На его выходе сигнал пропорционален оценке угла  определяемой по алгоритму:
определяемой по алгоритму:

С выхода второго устройства вычитания 61 снимают напряжение по оценке  а на выходе пятого масштабирующего элемента 63 напряжение, пропорциональное оценке
а на выходе пятого масштабирующего элемента 63 напряжение, пропорциональное оценке  определяемой на основе уравнений (10) по алгоритму:
определяемой на основе уравнений (10) по алгоритму:

Сигнал  является оценкой абсолютной угловой скорости по компоненту ωη.
является оценкой абсолютной угловой скорости по компоненту ωη.
В работе прибора по определению компонента ωζ кажущиеся ускорения объекта задействованы электроды, измеряющие переменные зазоры  эталонные резисторы 43, напряжения которых пропорциональны указанным зазорам и поступающие на пары восьмого и девятого ФЧВ 48,49, а также двенадцатого и тринадцатого ФЧВ 52,53. Сигналы шестого и седьмого сумматоров напряжений 58 и 59 складывают в девятом сумматоре 67 по алгоритму:
эталонные резисторы 43, напряжения которых пропорциональны указанным зазорам и поступающие на пары восьмого и девятого ФЧВ 48,49, а также двенадцатого и тринадцатого ФЧВ 52,53. Сигналы шестого и седьмого сумматоров напряжений 58 и 59 складывают в девятом сумматоре 67 по алгоритму:
где  - оценка перемещения центра тяжести ротора относительно центра подвеса. Выходной сигнал девятого сумматора напряжений 67 поступает на вход шестого масштабирующего элемента 64, в котором по следующему алгоритму (вида (9)) определяют оценку компонента
- оценка перемещения центра тяжести ротора относительно центра подвеса. Выходной сигнал девятого сумматора напряжений 67 поступает на вход шестого масштабирующего элемента 64, в котором по следующему алгоритму (вида (9)) определяют оценку компонента  кажущегося ускорения ПО.
кажущегося ускорения ПО.
Этот сигнал является шестым выходом прибора. Элементы 54, 60, 65, 66 определяют первоначальный зазор (фиг. 7) в приборе в виде оценки  не являющейся выходной информацией, а используемой в технологических целях.
не являющейся выходной информацией, а используемой в технологических целях.
При этом полной первичной инерциальной информацией является такая, которая содержит три компонента вектора абсолютной угловой скорости и три компонента вектора кажущегося ускорения подвижного объекта. Она необходима и достаточна для полного решения задач определения трех углов ориентации и трех координат местоположения объекта в пространстве по дифференциальным уравнениям бесплатформенной инерциальной навигационной системы.
Технический результат полезной модели состоит в том, что впервые в одном гироскопе - акселерометре в виде ротора с тремя степенями свободы измеряются три компонента кажущегося ускорения и три компонента абсолютной угловой скорости ПО, то есть полная первичная инерциальная информация. Только при ее наличии обеспечивается решение задачи определения трех углов ориентации и трех координат местоположения ПО. Ранее для определения полной первичной инерциальной информации нужно было применять два прибора, т.е. два гироскопа - акселерометра по прототипу данной полезной модели. Из сказанного ясно, что кроме того, снижены масса и габариты устройства для определения полной первичной информации.
Гироскоп-акселерометр с электростатическим подвесом ротора и полной первичной информацией, содержащий динамически и статически сбалансированный ротор в виде круглой пластины с отверстиями, имеющий электропроводящие части и окруженный статорами, в состав которых входят торцевой, нижний и верхний планарные статоры подвеса, а также нижний и верхний статоры вращающего момента, при этом торцевой статор подвеса состоит из четного числа плоских электродов, расположенных в экваториальной плоскости ротора по окружности и закрепленных в боковых стенках нижней электроизолирующей втулки, укрепленной в корпусе, нижний и верхний одинаковые планарные статоры подвеса, каждый выполненный в виде четного числа плоских электродов, расположенных по окружности и закрепленных на нижней и верхней электроизолирующих втулках, причем последняя укреплена в крышке гироскопа-акселерометра, кроме того, нижний и верхний планарные статоры вращающего момента, закрепленные в нижней и верхней электроизолирующих втулках, состоящих из плоских электродов, соединены в три секции так, что в каждую секцию входят электроды, расположенные через два соседних на третий, секции соединены с тремя фазами источника переменного тока, кроме того, каждая пара соседних плоских электродов и эталонный резистор, последовательно включенный с источником высокочастотного напряжения, дросселем, а также фазочувствительным выпрямителем, образуют измерительную цепочку, при этом первый и второй входы фазочувствительного выпрямителя параллельно соединены с источником высокочастотного напряжения и эталонным резистором соответственно, а его выход является выходом измерительной цепочки,при этом выходы измерительных цепочек с положительными и отрицательными координатами торцевых электродов подвеса первой измерительной оси соединены с первым и вторым входами соответственно первого сумматора, выход которого соединен с входом первого масштабирующего элемента, выход его является выходом по компоненту W кажущегося ускорения,выходы измерительных цепочек торцевых электродов подвеса с положительными и отрицательными координатами соответственно по второй измерительной оси соединены с помощью измерительных цепочек с первым и вторым входами соответственно второго сумматора, выход его соединен с входом второго масштабирующего устройства, выход которого является выходом по компоненту W кажущегося ускорения,отличающийся тем, чтодополнительно введены измерительные цепочки, содержащие две пары диаметрально расположенных торцевых электродов по положительному и отрицательному направлению третьей измерительной оси, пару электродов по положительному направлению второй измерительной оси, эталонный резистор по положительному направлению второй измерительной оси, распределенное сопротивление этой цепочки по положительному направлению второй измерительной оси, ФЧВ по положительному направлению второй измерительной оси, входы которого соединены с фильтром, третий масштабирующий элемент, выход которого служит для съема информации по третьему компоненту ω угловой скорости подвижного объекта,также введены измерительные цепочки по третьей измерительной оси, выполненные с возможностью оценки зазоров между ротором и верхними и нижними плоскими электродами статоров, смещенными по второй измерительной оси в отрицательном направлении, выходы этих измерительных цепочек подключены к входам четвертого сумматора напряжений, выход которого соединен с первым входом первого устройства вычитания, ко второму инвертирующему входу его подключен выход пятого сумматора напряжений, входы которого соединены с выходами двух измерительных цепочек по третьей измерительной оси, выполненных с возможностью оценки зазоров между ротором и верхними и нижними плоскими электродами статоров, смещенными по второй измерительной оси в положительном направлении, при этом выход первого устройства вычитания соединен со входом четвертого масштабирующего элемента, выход которого является выходом по компоненту ω угловой скорости ПО,выходы двух измерительных цепочек, выполненных с возможностью оценки зазоров по третьей измерительной оси между ротором и верхними и нижними плоскими электродами статоров, смещенными по отрицательному направлению первой измерительной оси, подключены к входам шестого сумматора, выходы двух измерительных цепочек, выполненных с возможностью оценки зазоров по третьей измерительной оси между ротором и верхними и нижними плоскими электродами статоров, смещенными по положительному направлению первой измерительной оси, соединены со входами седьмого сумматора напряжения, выходы шестого и седьмого сумматоров напряжений соединены со входом девятого сумматора, выход которого подключен ко входу шестого масштабирующего элемента, выход которого является выходом по компоненте W кажущегося ускорения ПО,также выходы шестого и седьмого сумматоров соединены с первым и вторым входами второго устройства вычитания, выход которого соединен с входом пятого масштабирующего элемента, выход его является выходом по компоненту ω абсолютной угловой скорости.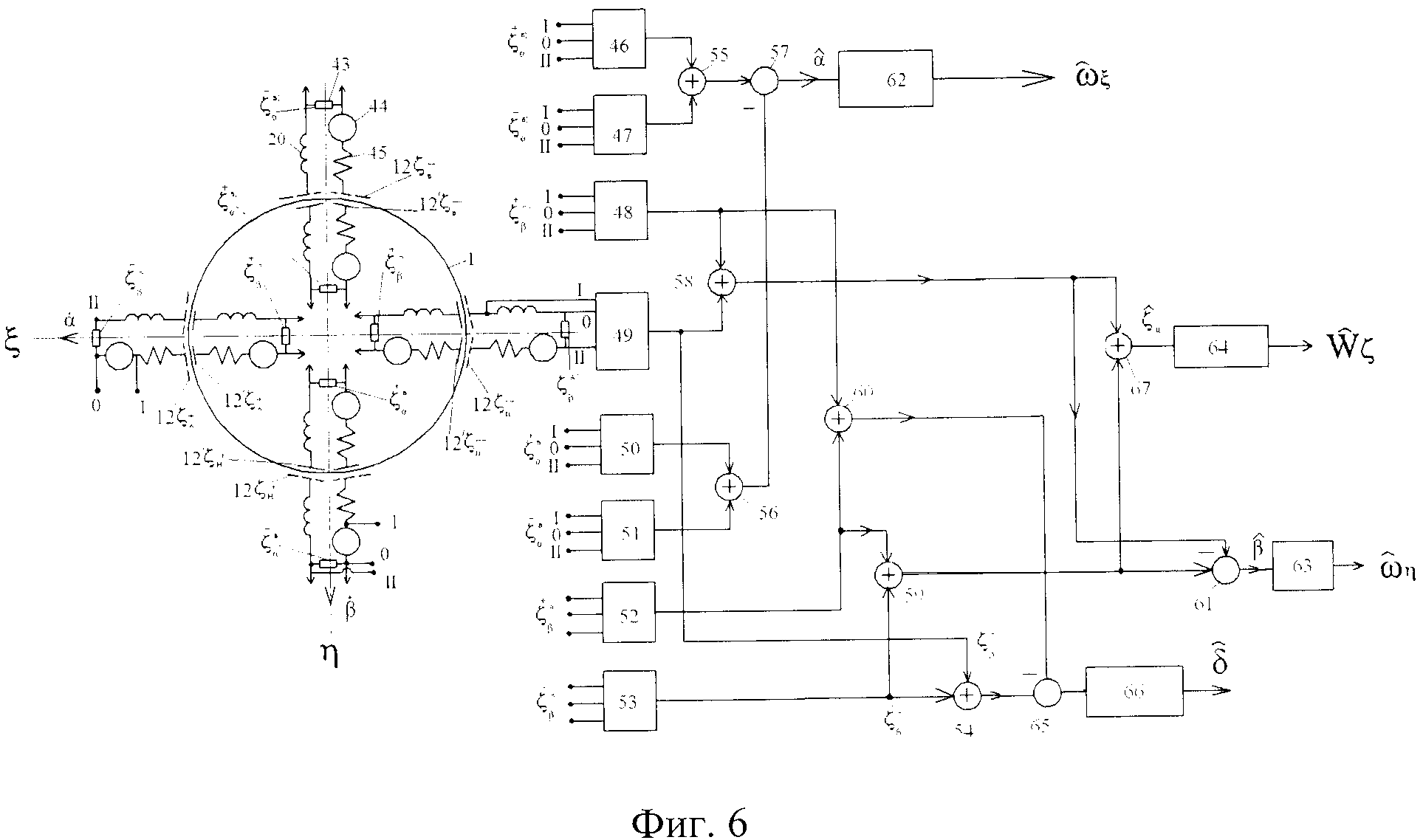
Способ удаления глазо-двигательных артефактов на электроэнцефаллограммах
Способ насыщения пористого покрытия эндопротезов
Составное поршневое кольцо для двигателя внутреннего сгорания или компрессора
Устройство для пропитки пористых изделий
Способ приготовления бактерицида для обеззараживания воды
Датчик линейных перемещений на основе пленки vo
Стенд для измерения вибрационных реактивных моментов гиромотора
Состав для огнезащитной отделки полиакрилонитрильных волокон
Состав и способ получения полимерного протонпроводящего композиционного материала
Способ выделения веретеноподобных паттернов по временным данным электроэнцефалограмм
Способ получения антифрикционного материала
Ортопедический аппарат для разгрузки нижних конечностей человека
Сырьевая смесь для изготовления пеносиликата
Способ настройки вентильного электродвигателя
Способ обработки внутренних цилиндрических поверхностей свободным абразивом
Способ удаления глазо-двигательных артефактов на электроэнцефаллограммах
Способ насыщения пористого покрытия эндопротезов
Составное поршневое кольцо для двигателя внутреннего сгорания или компрессора
Устройство для пропитки пористых изделий
Способ приготовления бактерицида для обеззараживания воды

