Результат интеллектуальной деятельности: СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ
Вид РИД
Изобретение
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей, обнаруживаемых бортовой радиолокационной станцией.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации воздушных целей, реализуемый в радиолокационной системе с активным ответом (РСАО) (см., например, Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. - 656 с. С. 623).
К недостаткам данного способа относится низкая вероятность правильной идентификации воздушных целей в условиях многоцелевой обстановки. Основными причинами этого являются ошибки, возникающие в результате наложения ответных сигналов нескольких воздушных судов, находящихся в пределах объема неопределенности РСАО, и ошибки, возникающие в результате привязки к обнаруженной воздушной цели ответного сигнала другого воздушного судна, находящегося в пределах объема неопределенности РСАО.
Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных целей, обнаруженных бортовой РЛС в условиях многоцелевой обстановки, за счет уменьшения объема неопределенности РСАО путем применения селекции запросного сигнала по пространственным координатам воздушных целей, обнаруженных бортовой РЛС.
Указанный результат достигается тем, что в известном способе идентификации воздушных целей, реализуемом в РСАО, основанном на обнаружении воздушной цели с помощью бортовой РЛС на стороне запрашивающего воздушного судна, формировании и передаче кодированного запросного сигнала самолетным радиолокационным запросчиком, приеме и обработке данного запросного сигнала самолетным радиолокационным ответчиком на стороне каждого i-го воздушного судна, где  , I - число воздушных судов, находящихся в зоне действия самолетного радиолокационного запросчика, имеющих на борту самолетный радиолокационный ответчик, формировании и передаче кодированного ответного сигнала самолетным радиолокационным ответчиком со стороны каждого i-го воздушного судна, приеме и обработке данных ответных сигналов, а также формировании решения об идентификационном признаке воздушной цели самолетным радиолокационным запросчиком, формируют на стороне запрашивающего воздушного судна оценки декартовых координат обнаруженной воздушной цели и соответствующие дисперсии в относительной системе координат, кодируют запросный сигнал информацией, содержащей оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, на стороне каждого i-го воздушного судна выделяют из принятого запросного сигнала оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, из навигационной системы каждого i-го воздушного судна вводят оценки его декартовых координат и соответствующие дисперсии, оценивают расстояние Ri между обнаруженной воздушной целью и i-м воздушным судном, определяют пороговое значение hi по расстоянию между обнаруженной воздушной целью и i-м воздушным судном, если Ri<hi, то формируют решение о совпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна и передают ответный сигнал, в противном случае ответный сигнал не передают.
, I - число воздушных судов, находящихся в зоне действия самолетного радиолокационного запросчика, имеющих на борту самолетный радиолокационный ответчик, формировании и передаче кодированного ответного сигнала самолетным радиолокационным ответчиком со стороны каждого i-го воздушного судна, приеме и обработке данных ответных сигналов, а также формировании решения об идентификационном признаке воздушной цели самолетным радиолокационным запросчиком, формируют на стороне запрашивающего воздушного судна оценки декартовых координат обнаруженной воздушной цели и соответствующие дисперсии в относительной системе координат, кодируют запросный сигнал информацией, содержащей оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, на стороне каждого i-го воздушного судна выделяют из принятого запросного сигнала оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, из навигационной системы каждого i-го воздушного судна вводят оценки его декартовых координат и соответствующие дисперсии, оценивают расстояние Ri между обнаруженной воздушной целью и i-м воздушным судном, определяют пороговое значение hi по расстоянию между обнаруженной воздушной целью и i-м воздушным судном, если Ri<hi, то формируют решение о совпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна и передают ответный сигнал, в противном случае ответный сигнал не передают.
Сущность изобретения заключается в применении в РСАО, наряду с существующими видами селекции запросного сигнала, дополнительной селекции запросного сигнала по пространственным координатам обнаруженной воздушной цели. Под дополнительной селекцией запросного сигнала по пространственным координатам обнаруженной воздушной цели понимается выделение на стороне каждого i-го воздушного судна из множества запросных сигналов запросного сигнала, адресованного данному воздушному судну. Данная процедура осуществляется путем сравнения собственных пространственных координат i-го воздушного судна и пространственных координат воздушной цели, обнаруженной бортовой РЛС запрашивающего воздушного судна, информация о которых передается в запросном сигнале. Это позволяет уменьшить пространственный объем неопределенности РСАО до размеров, определяемых ошибками измерения пространственных координат обнаруженной воздушной цели, а также ошибками измерения пространственных координат собственного местоположения запрашивающего и i-го воздушных судов.
Данный способ включает в себя следующие этапы:
1. На стороне запрашивающего воздушного судна осуществляются:
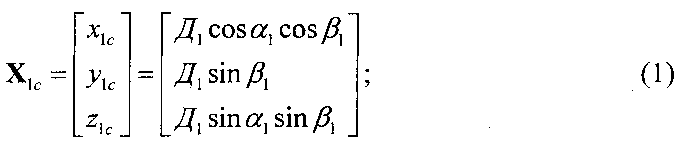
- обнаружение воздушной цели и формирование оценок ее полярных координат J1=[Д1,α1,β1]T в связанной системе координат с соответствующими дисперсиями D[J1] с помощью бортовой РЛС, где Д1 - дальность до обнаруженной воздушной цели, α1 - пеленг обнаруженной воздушной цели в горизонтальной плоскости, β1 - пеленг обнаруженной воздушной цели в вертикальной плоскости;
- ввод из бортовой РЛС оценок полярных координат обнаруженной воздушной цели J1=[Д1,α1,β1]T в связанной системе координат с соответствующими дисперсиями D[J1];
- формирование оценок декартовых координат местоположения запрашивающего воздушного судна X0=[x0,y0,z0]T и угловых координат W0=[ψ0,ϑ0,γ0]T, характеризующих его пространственную ориентацию в относительной системе координат с соответствующими дисперсиями D[X0] и D[W0] с помощью навигационной системы, где ψ0 - угол рысканья, ϑ0 - тангаж, γ0 - крен.
- ввод из навигационной системы оценок декартовых координат местоположения запрашивающего воздушного судна X0=[x0,y0,z0]T и угловых координат W0=[ψ0,ϑ0,γ0]T, характеризующих его пространственную ориентацию в относительной системе координат с соответствующими дисперсиями D[X0] и D[W0];
- пересчет оценок полярных координат воздушной цели J1 в декартовы координаты X1 связанной системы координат в соответствии с выражением
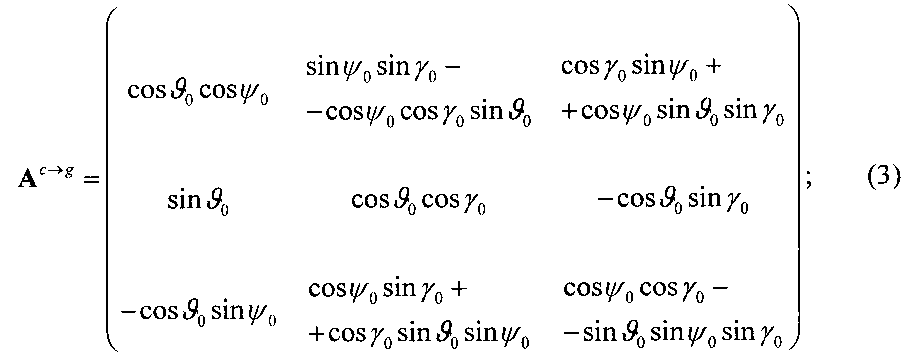
- пересчет оценок декартовых координат обнаруженной воздушной цели из связанной системы координат в нормальную систему координат в соответствии с выражением

где Ac→g - матрица перехода из связанной системы координат в нормальную систему координат,
- пересчет оценок декартовых координат обнаруженной воздушной цели X1g из нормальной системы координат в относительную систему координат в соответствии с выражением

- формирование матрицы дисперсий оценок декартовых координат местоположения обнаруженной воздушной цели в нормальной системе координат в соответствии с выражением
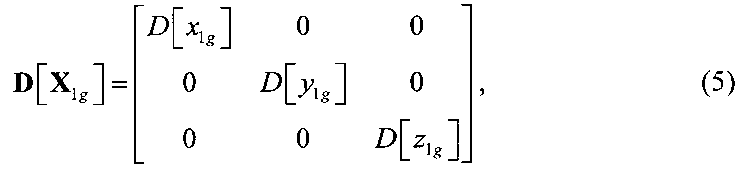
где
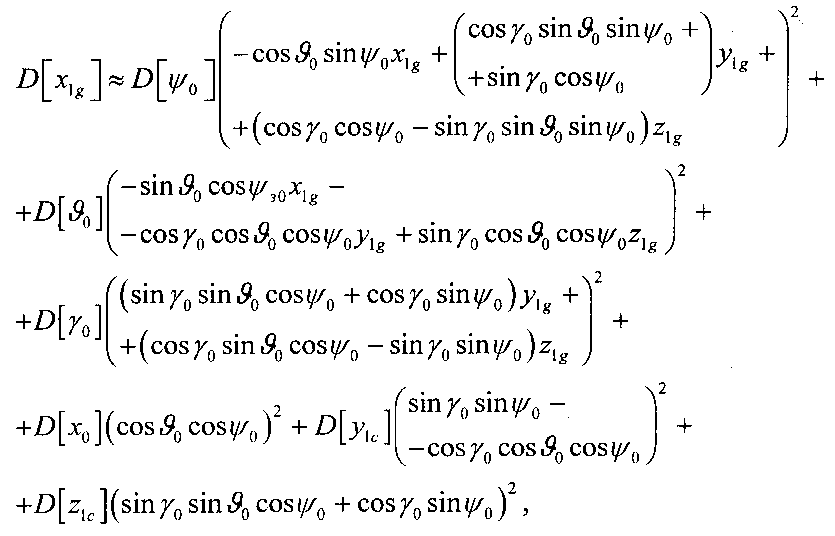
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
- определение дисперсий оценок декартовых координат обнаруженной воздушной цели в относительной системе координат в соответствии с выражением

- формирование и передача кодированного запросного сигнала с информацией об оценках декартовых координат местоположения обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1] с помощью самолетного радиолокационного запросчика;
2. На стороне i-го воздушного судна осуществляется:
- прием и обработка кодированного запросного сигнала с помощью самолетного радиолокационного ответчика с выделением информации об оценках декартовых координат местоположения обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1];
- формирование оценок декартовых координат i-го воздушного судна Xi=[xi,yi,zi]T в относительной системе координат и соответствующих дисперсий D[Xi] с помощью навигационной системы;
- ввод из навигационной системы оценок декартовых координат i-го воздушного судна Xi=[xi,yi,zi]T в относительной системе координат и соответствующих дисперсий  ;
;
- оценка расстояния Ri между обнаруженной воздушной целью и i-м воздушным судном в соответствии с выражением

- расчет порогового значения hi по расстоянию между обнаруженной воздушной целью и i-м воздушным судном в соответствии с выражением
- формирование решения о совпадении или несовпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна по критерию Неймана-Пирсона в соответствии с выражением

где гипотеза χi=1 - пространственные координаты обнаруженной воздушной цели и i-го воздушного судна совпадают, то есть i-е воздушное судно является воздушной целью, обнаруженной бортовой РЛС запрашивающего воздушного судна, гипотеза χi=0 - пространственные координаты обнаруженной воздушной цели и i-го воздушного судна не совпадают, то i-е воздушное судно не является целью, обнаруженной бортовой РЛС запрашивающего воздушного судна;
- формирование и передача кодированного ответного сигнала с помощью самолетного радиолокационного ответчика в случае принятого решения о совпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна.
Этим обеспечивается уменьшение объема неопределенности РСАО до размеров эллипса с полуосями  ;
;  ;
;  .
.
3. На стороне запрашивающего воздушного судна осуществляется прием и обработка ответного сигнала, а также формирование решения об идентификационном признаке цели самолетным радиолокационным запросчиком в соответствии с существующим способом идентификации.
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре 1, где обозначено: 1 - запрашивающее воздушное судно, 2 - блок обработки информации, 3 - навигационная система, 4 - синхронизатор, 5 - самолетный радиолокационный запросчик, 6 - бортовая РЛС, 7 - запрашиваемое воздушное судно, 8 - самолетный радиолокационный ответчик, 9 - блок обработки информации, 10 - синхронизатор, 11 - навигационная система.
Блок обработки информации 2 предназначен для обработки информации, поступающей от навигационной системы 3 и бортовой РЛС 6 в соответствии с выражениями (1-6). Навигационная система 3 предназначена для формирования оценок декартовых координат местоположения запрашивающего воздушного судна 1 X0=[x0,y0,z0]T и угловых координат, характеризующих его пространственную ориентацию W0=[ψ0,ϑ0,γ0]T в относительной системе координат с соответствующими дисперсиями D[X0] и D[W0]. Синхронизатор 4 предназначен для синхронизации работы элементов устройства на борту запрашивающего воздушного судна 1. Самолетный радиолокационный запросчик 5 предназначен для формирования и передачи кодированного запросного сигнала с информацией об оценках декартовых координат обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1], для приема и обработки кодированного ответного сигнала переданного с борта запрашиваемого воздушного судна, а так же для формирования решения об идентификационном признаке воздушной цели в соответствии с существующим способом идентификации. Бортовая РЛС 6 предназначена для обнаружения воздушной цели и формирования оценок ее полярных координат J1=[Д1,α1,β1]T в связанной системе координат с соответствующими дисперсиями D[J1]. Самолетный радиолокационный ответчик предназначен для приема и обработки кодированного запросного сигнала, переданного с борта запрашивающего воздушного судна 1, с выделением информации о пространственных координатах обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1], а также для формирования и передачи кодированного ответного сигнала, в случае принятого решения в блоке обработки информации 9 о совпадении пространственных координат обнаруженной воздушной цели и запрашиваемого воздушного судна 7. Блок обработки информации 9 предназначен для обработки информации, поступающей от самолетного радиолокационного ответчика 8 и навигационной системы 11 в соответствии с выражениями (7-9). Синхронизатор 10 предназначен для синхронизации работы элементов устройства на борту запрашиваемого воздушного судна 7. Навигационная система 11 предназначена для формирования оценок декартовых координат местоположения i-го воздушного судна 7 Xi=[xi,yi,zi]T в относительной системе координат и соответствующих дисперсий D[Xi].
Устройство работает следующим образом. Синхронизатор 4 синхронизирует работу элементов устройства на борту запрашивающего воздушного судна. Бортовая РЛС 6 обнаруживает воздушную цель и формирует оценки ее полярных координат J1=[Д1,α1,β1]T в связанной системе координат с соответствующими дисперсиями D[J1]. С выхода бортовой РЛС 6 на вход блока обработки информации 2 поступают оценки полярных координат обнаруженной воздушной цели J1=[Д1,α1,β1]T в связанной системе координат с соответствующими дисперсиями D[J1]. Навигационная система 3 формирует оценки декартовых координат местоположения запрашивающего воздушного судна X0=[x0,y0,z0]T и угловых координат W0=[ψ0,ϑ0,γ0]T, характеризующих его пространственную ориентацию в относительной системе координат с соответствующими дисперсиями D[X0] и D[W0]. С выхода навигационной системы 3 на вход блока обработки информации 2 поступают оценки декартовых координат местоположения запрашивающего воздушного судна X0=[x0,y0,z0]T и угловых координат W0=[ψ0,ϑ0,γ0]T, характеризующих его пространственную ориентацию в относительной системе координат с соответствующими дисперсиями D[X0] и D[W0]. Блок обработки информации 2 обрабатывает информацию, поступающую от навигационной системы 3 и бортовой РЛС 6 в соответствии с выражениями (1-6). С выхода блока обработки информации 2 на вход самолетного радиолокационного запросчика 5 поступает информация об оценках декартовых координат обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1]. Самолетный радиолокационный запросчик 5 формирует и передает кодированный запросный сигнал с информацией об оценках декартовых координат обнаруженной воздушной цели X1 и соответствующих дисперсиях D[X1]. Синхронизатор 10 синхронизирует работу элементов устройства на борту i-го воздушного судна 7. Самолетный радиолокационный ответчик 8 принимает и обрабатывает кодированный запросный сигнал, переданный с борта запрашивающего воздушного судна 1, с выделением информации об оценках декартовых координат обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1]. С выхода самолетного радиолокационного ответчика 8 на вход блока обработки информации 9 поступает информация об оценках декартовых координат обнаруженной воздушной цели X1 в относительной системе координат и соответствующих дисперсиях D[X1]. Навигационная система 11 формирует оценки декартовых координат местоположения i-го воздушного судна 7 Xi=[xi,yi,zi]T в относительной системе координат с соответствующими дисперсиями  . С выхода навигационной системы 11 на вход блока обработки информации 9 поступают оценки декартовых координат местоположения i-го воздушного судна 7 Xi=[xi,yi,zi]T в относительной системе координат с соответствующими дисперсиями D[Xi]. Блок обработки информации 9 обрабатывает информацию, поступившую с выходов самолетного радиолокационного ответчика 8 и навигационной системы 11 в соответствии с выражениями (7-9). С выхода блока обработки информации 9 на вход самолетного радиолокационного ответчика 8 поступает информация о совпадении или несовпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна 7. Самолетный радиолокационный ответчик формирует и передает кодированный ответный сигнал, в случае принятого решения в блоке обработки информации 9 о совпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна 7. Самолетный радиолокационный запросчик 5 принимает и обрабатывает кодированный ответный сигнал, переданный с борта запрашиваемого воздушного судна 7, а также формирует решение об идентификационном признаке воздушной цели в соответствии с существующим способом идентификации.
. С выхода навигационной системы 11 на вход блока обработки информации 9 поступают оценки декартовых координат местоположения i-го воздушного судна 7 Xi=[xi,yi,zi]T в относительной системе координат с соответствующими дисперсиями D[Xi]. Блок обработки информации 9 обрабатывает информацию, поступившую с выходов самолетного радиолокационного ответчика 8 и навигационной системы 11 в соответствии с выражениями (7-9). С выхода блока обработки информации 9 на вход самолетного радиолокационного ответчика 8 поступает информация о совпадении или несовпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна 7. Самолетный радиолокационный ответчик формирует и передает кодированный ответный сигнал, в случае принятого решения в блоке обработки информации 9 о совпадении пространственных координат обнаруженной воздушной цели и i-го воздушного судна 7. Самолетный радиолокационный запросчик 5 принимает и обрабатывает кодированный ответный сигнал, переданный с борта запрашиваемого воздушного судна 7, а также формирует решение об идентификационном признаке воздушной цели в соответствии с существующим способом идентификации.
Для определения эффективности предлагаемого способа оценивались следующие показатели:
- вероятность правильной идентификации обнаруженной воздушной цели с помощью предлагаемого способа Pпи;
- вероятность правильной идентификации обнаруженной воздушной цели с помощью существующего способа (прототипа) (см., например, Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. С. 656) Pпи0.
Показатели Pпи и Pпи0 оценивались путем проведения статистических испытаний на соответствующих имитационных моделях радиолокационной системы с активным ответом при одинаковых начальных условиях.
Для характеристики эффективности предлагаемого способа определялся прирост вероятности правильной идентификации воздушных целей в радиолокационной системе с активным ответом за счет применения предлагаемого способа по отношению к данному показателю существующего способа (прототипа) ΔP=Pпи-Pпи0.
На фигуре 2 приведены графики зависимости величины ΔP от дальности до воздушной цели Дц (км), обнаруженной бортовой РЛС, для различных значений пространственных плотностей воздушных целей ρ. При этом график 1 соответствует значению пространственной плотности воздушных объектов  , а график 2 - значению
, а график 2 - значению  .
.
Из анализа графиков, приведенных на фигуре 2 видно, что применение предлагаемого способа приводит к существенному повышению вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки. При этом наибольший положительный эффект достигается при более высоких пространственных плотностях воздушных объектов. Так, например, для  на дальности до воздушного объекта, обнаруженного бортовой РЛС, равной Дц=100 км, прирост вероятности правильной идентификации составляет ΔP≈0,05, в то время как для
на дальности до воздушного объекта, обнаруженного бортовой РЛС, равной Дц=100 км, прирост вероятности правильной идентификации составляет ΔP≈0,05, в то время как для  , при прочих равных условиях прирост вероятности правильной идентификации составляет ΔP≈0,32.
, при прочих равных условиях прирост вероятности правильной идентификации составляет ΔP≈0,32.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации воздушных целей с применением селекции запросного сигнала по их пространственным координатам.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что применение селекции запросного сигнала по пространственным координатам обнаруженной воздушной цели увеличивает вероятность правильной идентификации воздушных судов.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Способ идентификации воздушных целей, основанный на обнаружении воздушной цели с помощью бортовой РЛС на стороне запрашивающего воздушного судна, формировании и передаче кодированного запросного сигнала самолетным радиолокационным запросчиком, приеме и обработке данного запросного сигнала самолетным радиолокационным ответчиком на стороне каждого i-го воздушного судна, где , I - число воздушных судов, находящихся в зоне действия самолетного радиолокационного запросчика, имеющих на борту самолетный радиолокационный ответчик, формировании и передаче кодированного ответного сигнала самолетным радиолокационным ответчиком со стороны каждого i-го воздушного судна, приеме и обработке данных ответных сигналов, а также формировании решения об идентификационном признаке воздушной цели самолетным радиолокационным запросчиком, отличающийся тем, что на стороне запрашивающего воздушного судна формируют оценки декартовых координат обнаруженной воздушной цели и соответствующие дисперсии в относительной системе координат, кодируют запросный сигнал информацией, содержащей оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, на стороне каждого i-го воздушного судна выделяют из принятого запросного сигнала оценки декартовых координат обнаруженной воздушной цели в относительной системе координат и соответствующие дисперсии, из навигационной системы каждого i-го воздушного судна вводят оценки его декартовых координат и соответствующие дисперсии, оценивают расстояние R между обнаруженной воздушной целью и i-м воздушным судном, определяют пороговое значение h по расстоянию между обнаруженной воздушной целью и i-м воздушным судном, если R

Способ усиления и демодуляции частотно-модулированных сигналов и устройство его реализации
Способ генерации и частотной модуляции высокочастотных сигналов и устройство его реализации
Способ усиления и демодуляции частотно-модулированных сигналов и устройство его реализации
Устройство управления резервированной с помощью мажоритарных элементов системой
Устройство детектирования частотно-модулированных колебаний
Способ радиолокационного зондирования пространства
Способ идентификации воздушных объектов
Способ определения наличия взвешенной влаги в жидких углеводородах
Автоматический органичитель степени сжатия дожимающего компрессора плунжерного типа
Способ генерации высокочастотных сигналов и устройство его реализации
Способ генерации и частотной модуляции высокочастотных сигналов и устройство его реализации
Способ усиления и демодуляции частотно-модулированных сигналов и устройство его реализации
Способ генерации и частотной модуляции высокочастотных сигналов и устройство его реализации
Способ усиления и демодуляции частотно-модулированных сигналов и устройство его реализации
Устройство управления резервированной с помощью мажоритарных элементов системой
Устройство детектирования частотно-модулированных колебаний
Способ радиолокационного зондирования пространства
Способ идентификации воздушных объектов
Способ определения наличия взвешенной влаги в жидких углеводородах
Автоматический органичитель степени сжатия дожимающего компрессора плунжерного типа

