Результат интеллектуальной деятельности: ОПТИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Предлагаемое оптическое устройство формирования сенсорной поверхности относится к технике оптических Touch-панелей и может применяться для ввода информации в компьютеры, банкоматы, а также для формирования интерактивных рекламных стендов.
Известен ряд устройств подобного назначения. Например, в патенте США №7006236 В2 от 28.02.2006 г. [1] предлагается устройство, создающее виртуальную сенсорную поверхность, касание которой в определенных местах эквивалентно нажатию кнопок. Данное устройство содержит телевизионную камеру, оптически сопряженный с ней источник структурированного освещения и вычислительное устройство. Введение пальца в создаваемый источником структурированного освещения поток, регистрируется телевизионной камерой. Вычислительное устройство обрабатывает видеоинформацию, поступающую с телевизионной камеры, и определяет координаты точки касания пальца с потоком структурированного излучения. В устройствах, предложенных в патентах США №6480187 от 12.11.2002 г. [2], №6492633 от 10.12.2002 г. [3], №6844539 от 18.01.2005 г. [4], №7522156 от 21.04.2009 г. [5], используются отражатель и два приемопередающих оптических модуля. При появлении на пути потоков, формируемых излучателями, входящими в состав приемо-передающих модулей пальца (стилуса), специализированный вычислитель, с помощью фотоприемников, входящих в состав приемо-передающих модулей, регистрирует угловые координаты пальца (стилуса).
Известно устройство для интерактивной локализации объектов [6], содержащее два излучателя и оптически сопряженный с ним приемник излучения, выполненный в виде линейчатого, содержащего множество фоточувствительных элементов, расположенных вдоль линии, охватывающей часть периметра «виртуальной клавиатуры», при этом пересечение потоков формируемых излучателями на поверхности приемника излучения обеспечивает создание виртуальной клавиатуры, а процессорное устройство поочередно включает один из двух излучателей и определяет координаты объекта. Это устройство наиболее близко по функциональной схеме к предлагаемому и является его прототипом. К его недостаткам можно отнести непрямоугольную форму сенсорной поверхности («виртуальной клавиатуры»), а также неэффективное использование оптических потоков, формируемых обоими излучателями, при котором в создании сенсорной поверхности используется лишь часть их излучений. Кроме того, необходимость связи линейки и излучателей с вычислителем (далее процессором) требует наличия сигнальных кабелей, что портит общую эргономику устройства, делает устройство немобильным, особенно в случае охвата им большой площади.
Целью предлагаемого изобретения является расширение функциональных возможностей, связанное с увеличением размера сенсорной поверхности, повышение разрешающей способности, повышение помехоустойчивости, введение свойства мобильности.
Для этого предлагается оптическое сенсорное устройство формирования сенсорной поверхности, содержащее первый и второй излучатели и оптически сопряженный с ним первый линейчатый приемник излучения, содержащий множество фоточувствительных элементов, выстроенных вдоль одной линии. В устройство также входит первый процессор, вход которого подключен к выходу первого линейчатого приемника излучения. Дополнительно в устройство введены третий и четвертый излучатели, подключенные к первому и второму выходам первого процессора, и второй линейчатый приемник излучения, оптически сопряженный с третьим и четвертым излучателями, подключенный к входу вновь введенного второго процессора. Кроме того, первый и второй излучатели подключены к первому и второму выходам второго процессора, причем третий и четвертый излучатели расположены так, что находятся в непосредственной близости с первым и последним фоточувствительными элементами первого линейчатого приемника излучения, а первый и второй излучатели расположены так, что находятся в непосредственной близости с первым и последним фоточувствительными элементами второго линейчатого приемника излучения. Кроме того, первый процессор является подчиненным, а второй главным, при этом они связаны друг с другом последовательной двухпроводной линией связи. Главный процессор управляет поочередным включением третьего и четвертого излучателей, при этом он посылает команду подчиненному процессору, на ввод информации со второго линейчатого приемника излучения, в момент включения третьего и четвертого излучателей. Кроме того, главный процессор дает команду подчиненному на поочередное включение первого и второго излучателей, вводя при этом состояние первого линейчатого приемника излучения. Таким образом, получив состояния первого и второго линейчатых приемников излучения, первый процессор определяет далее координаты пальца пользователя, пересекшего какую либо из пар оптических потоков первого, второго, третьего и четвертого излучателей.
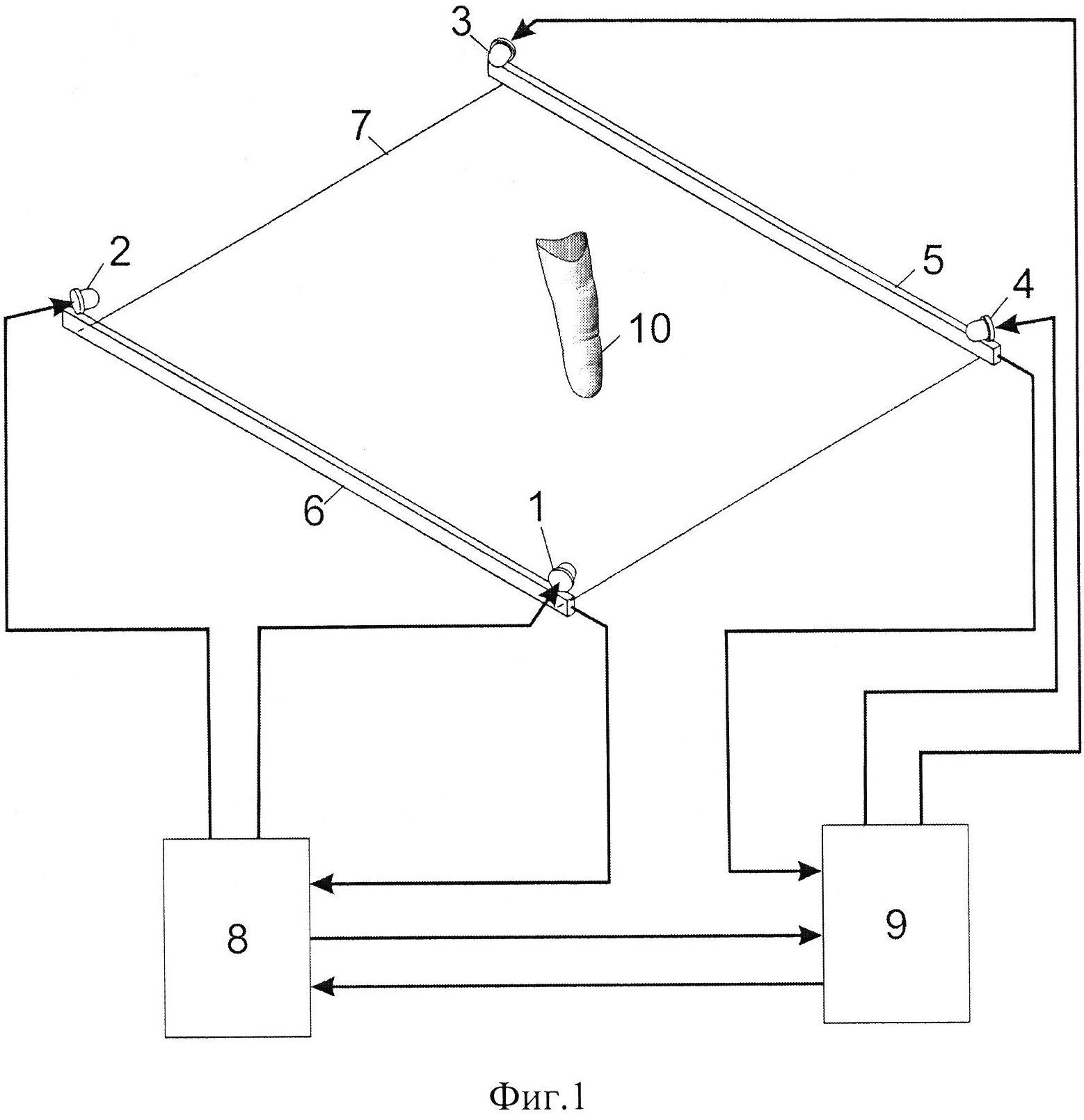
На фиг. 1 приведена функциональная схема предлагаемого устройства, где:
1, 2, 3, 4 - первый, второй, третий, четвертый излучатели соответственно,
5, 6 - первый и второй линейчатые приемники излучения,
7 - сенсорная поверхность,
8 - второй процессор,
9 - первый процессор,
10 - палец оператора.
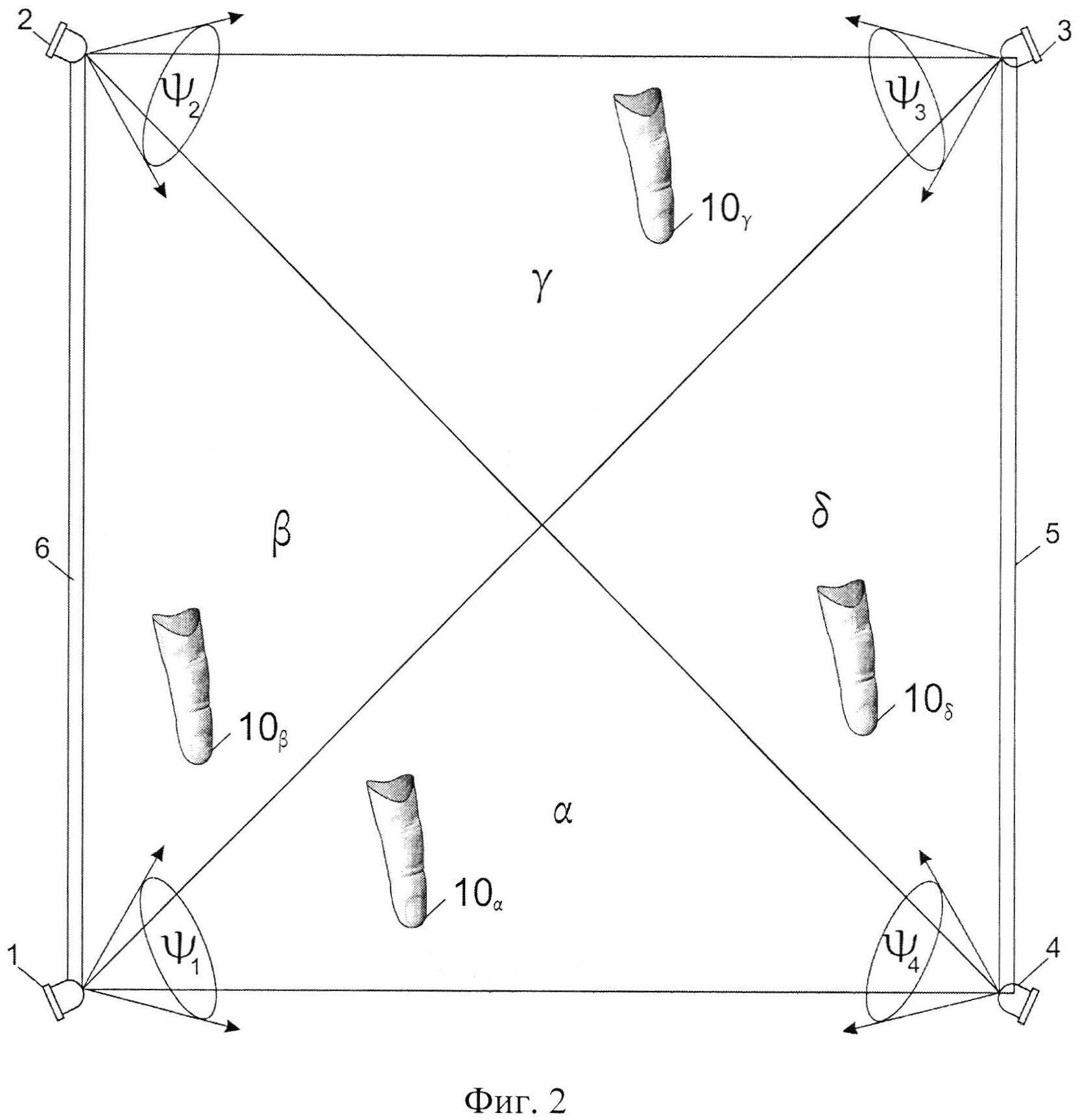
На фиг. 2 приведена схема разбиения сенсорной поверхности 7 на 4 зоны, где:
α, β, γ, δ - зоны рабочей поверхности 7,
10α - палец 10 оператора в зоне α,
10β - палец 10 оператора в зоне β,
10γ - палец 10 оператора в зоне γ,
10δ - палец 10 оператора в зоне δ,
Ψ1 - оптический поток излучателя 1,
Ψ2 - оптический поток излучателя 2,
Ψ3 - оптический поток излучателя 3,
Ψ4 - оптический поток излучателя 4.
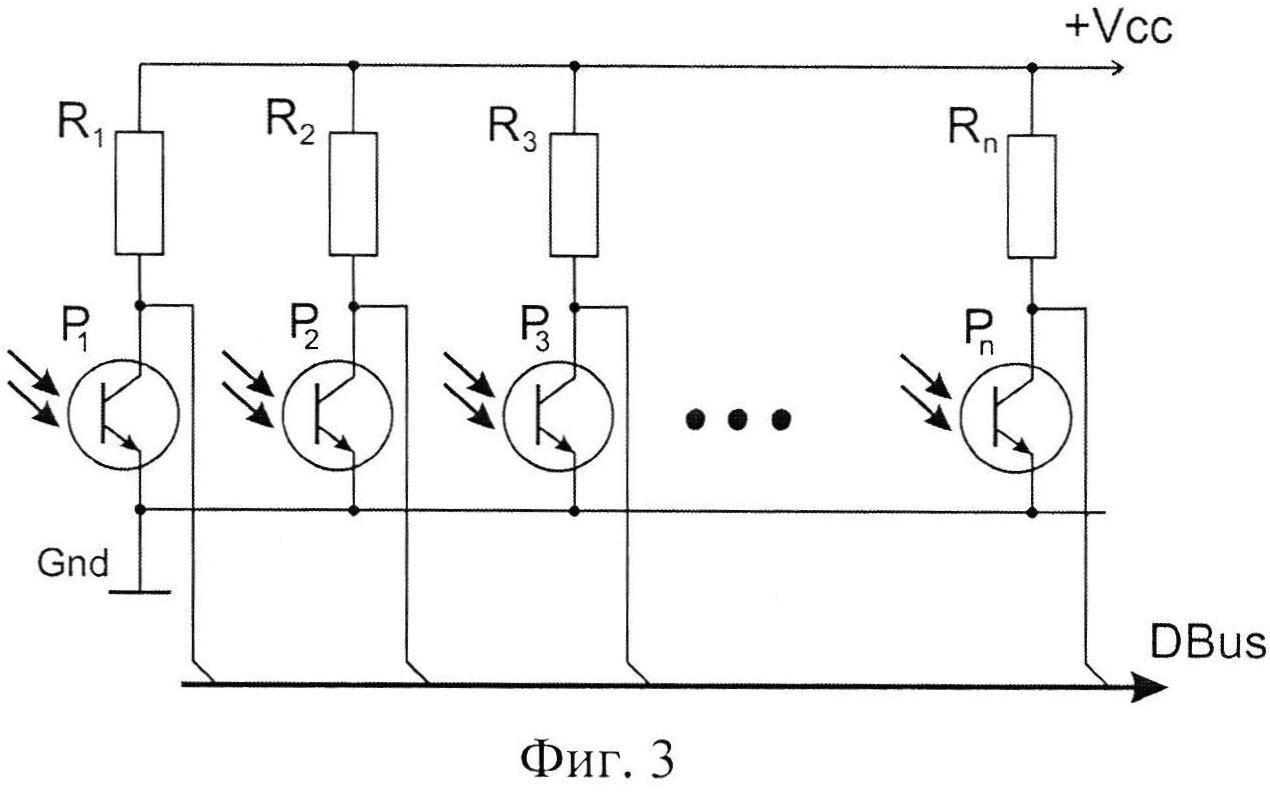
На фиг. 3 приведен пример электрической схемы линейчатого приемника излучения, где:
P1…Pn - фототранзисторы,
DBus - шина сигналов с выходов фототранзисторов.
На фиг. 4 приведен пример практического исполнения линейчатого приемника излучения, где:
РСВ - печатная плата.
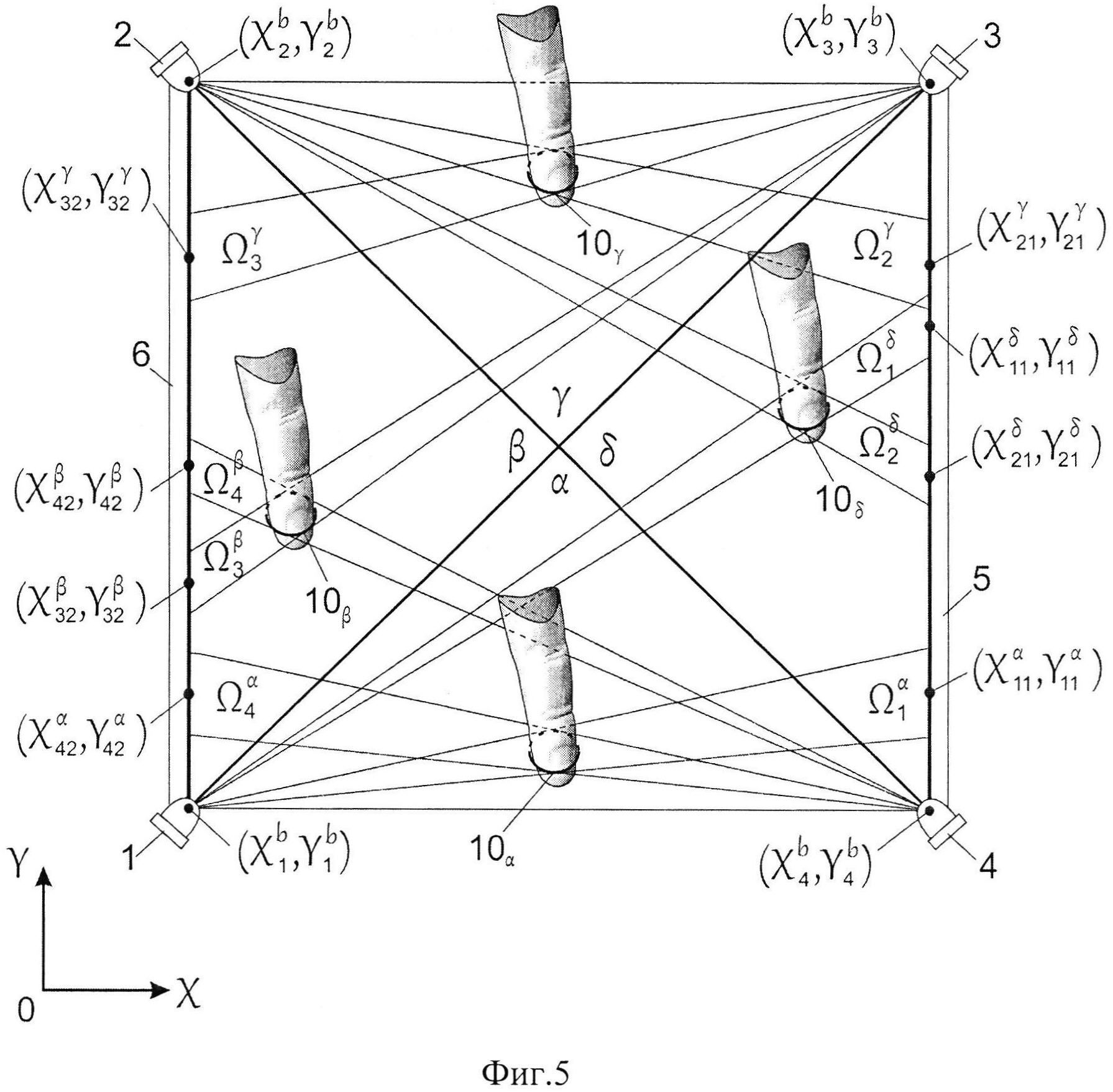
На фиг. 5 приведена оптико-геометрическая схема формирования теневых сегментов, где:
 - теневые сегменты, образуемые пальцем 10,
- теневые сегменты, образуемые пальцем 10,
0XY - система координат,

 - координаты центров теней на поверхностях линейчатых приемников излучения,
- координаты центров теней на поверхностях линейчатых приемников излучения,
 - координаты оптических центров излучателей.
- координаты оптических центров излучателей.
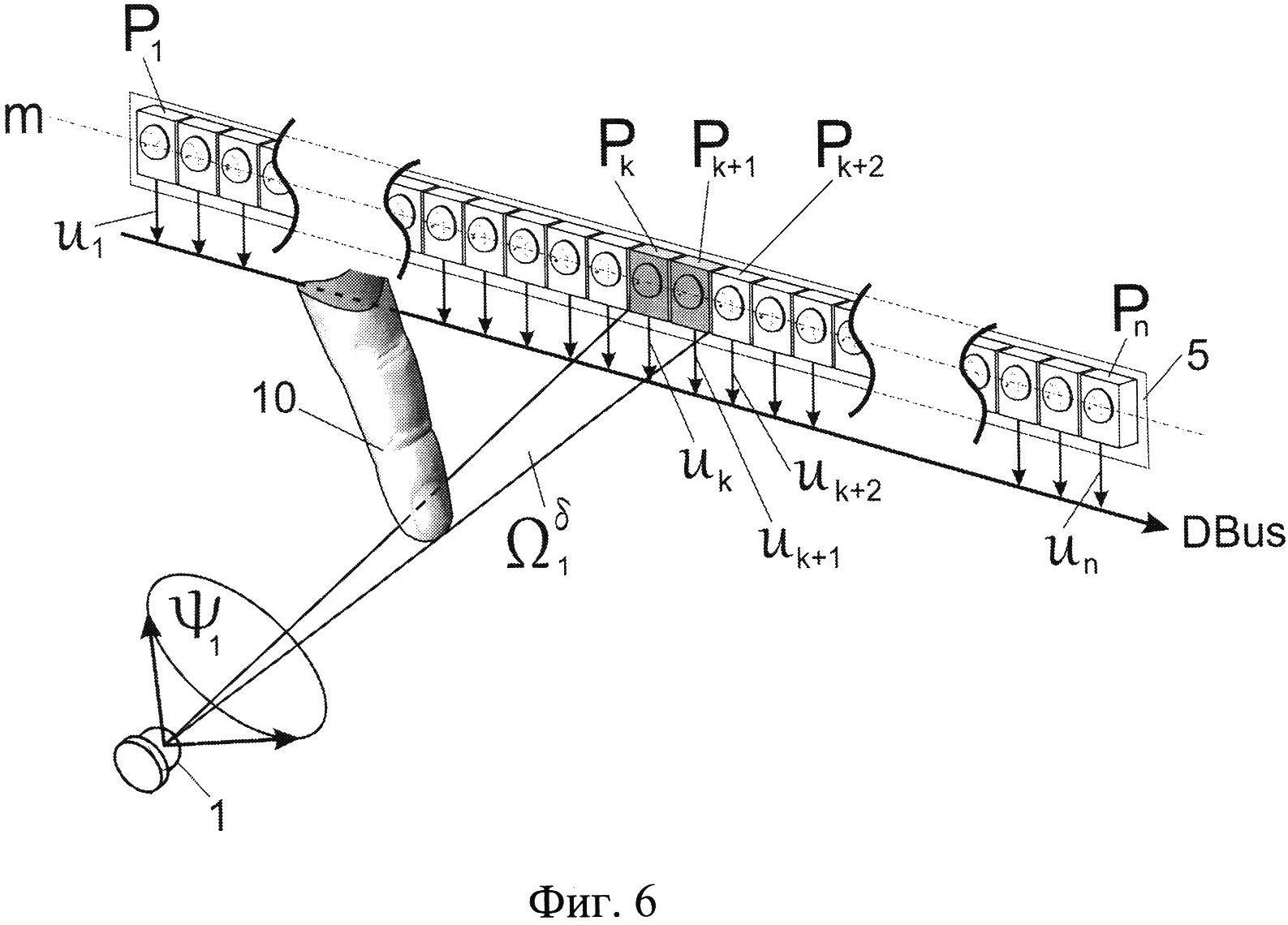
На фиг. 6 приведен пример формирования выходных сигналов фотоприемников, где:
u1…un - сигналы фототранзисторов Р1…Pn,
m - осевая оптическая линия линейчатого приемника излучения.
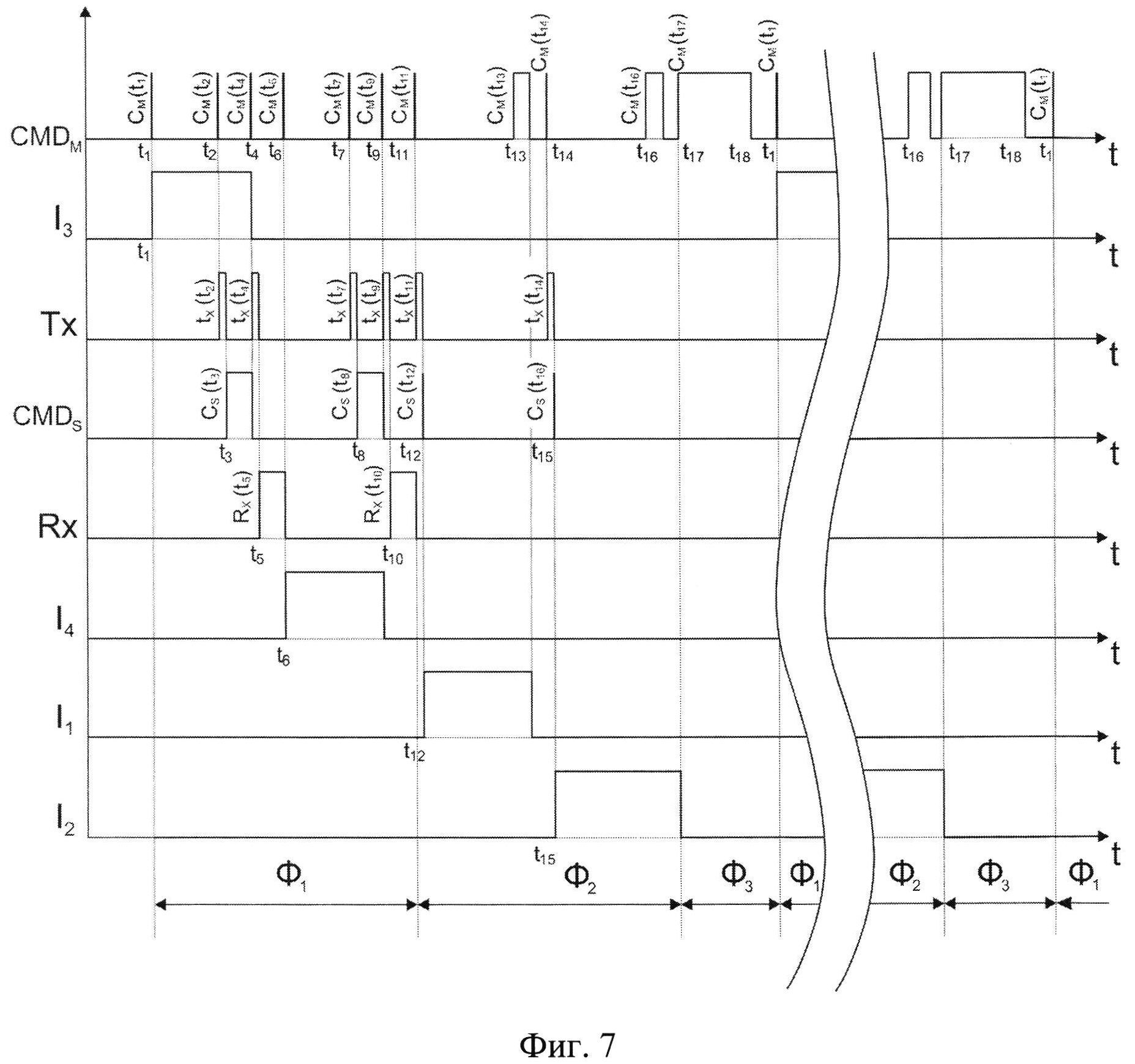
На фиг. 7 приведена временная диаграмма работы системы.
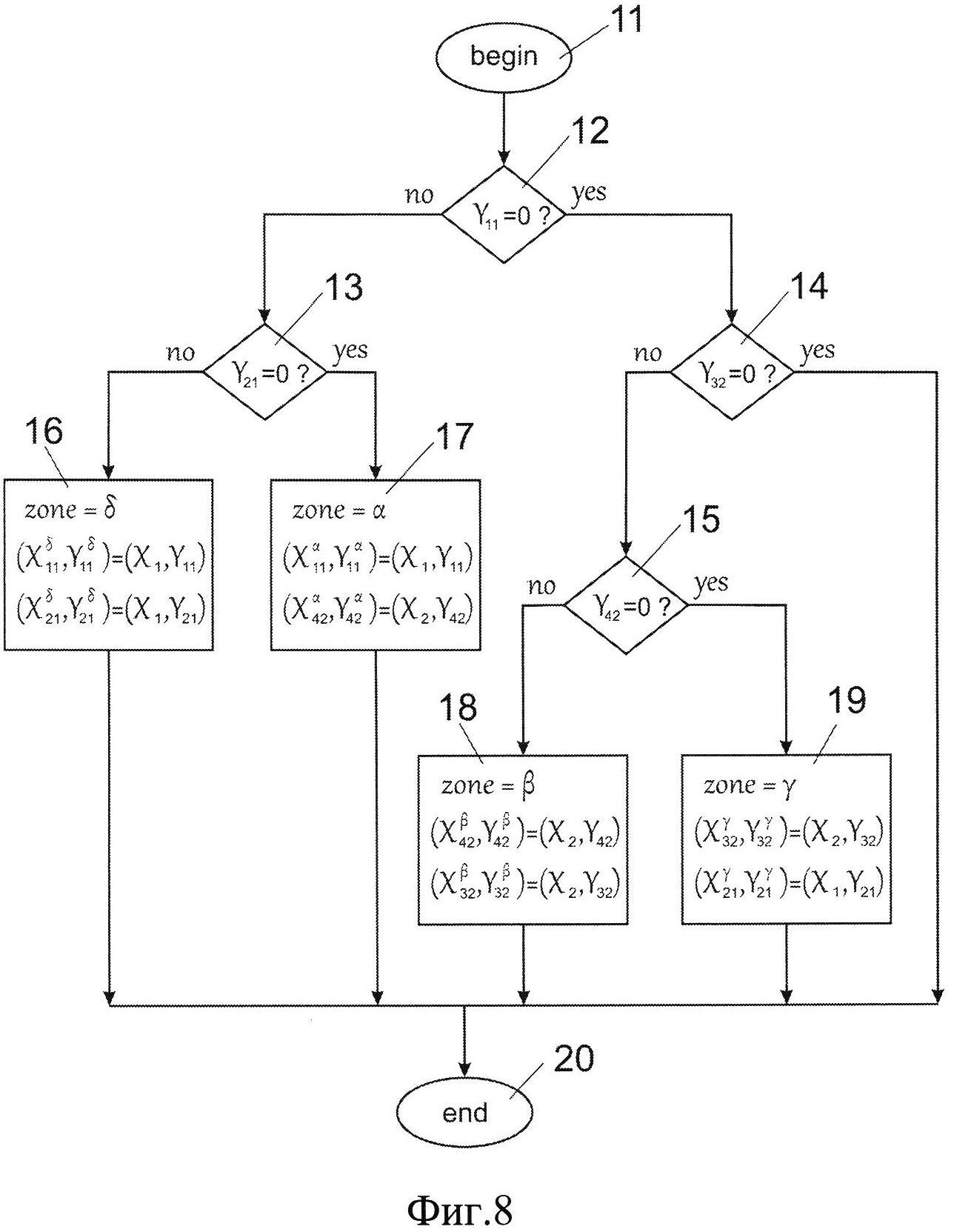
На фиг. 8 приведен алгоритм определения зоны нахождения пальца на поверхности 7.
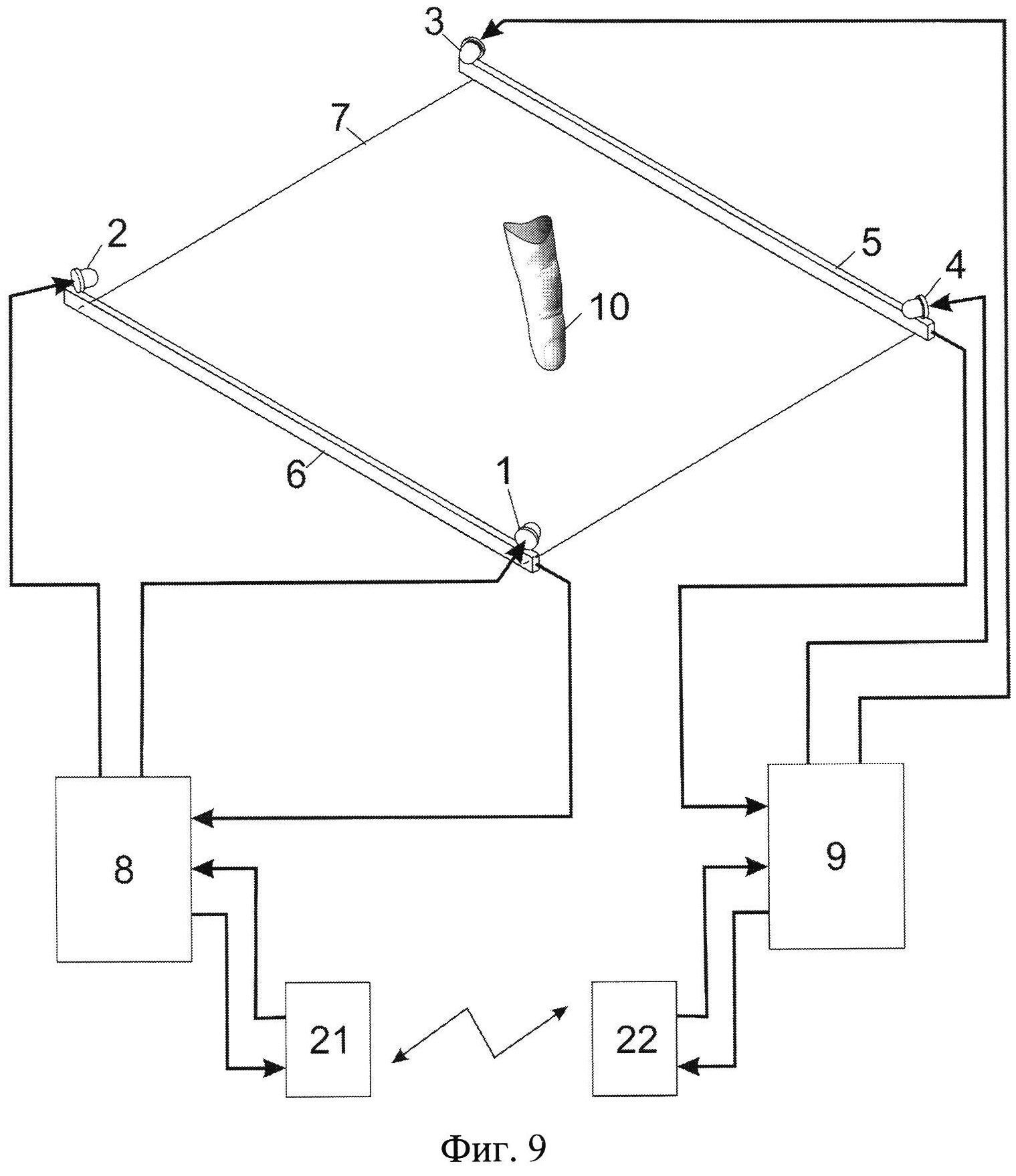
На фиг. 9 приведена функциональная схем устройства, соответствующего 2-му пункту формулы изобретения, где:
20, 21 - первый и второй радиочастотные приемопередатчики.
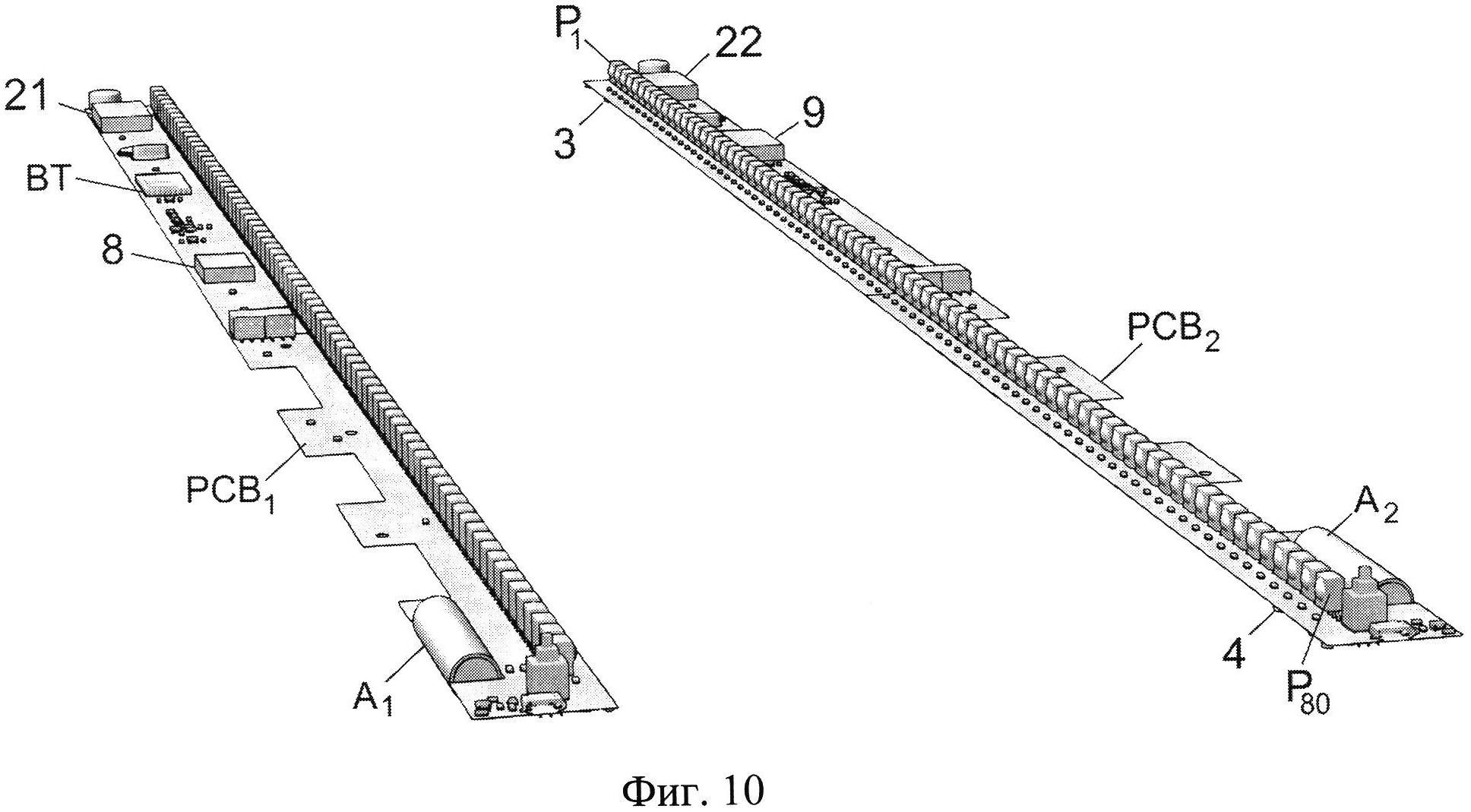
На фиг. 10 приведена 3D-модель исполнения устройства в виде двух модулей.
Функционирование устройства формирования сенсорной поверхности осуществляется следующим образом.
Включение излучателей 1 и 2, согласно функциональной схеме фиг. 1, вызывает формирование оптических потоков Ψ1 и Ψ2, включение излучателей 3 и 4 вызывает формирование оптических потоков Ψ3 и Ψ4 и иллюстрируется на фиг. 2. Эти потоки падают на поверхности линейчатых приемников излучения 5 и 6 и регистрируются входящими в их состав фототранзисторами или фотодиодами. На фиг. 3 приведена электрическая схема выполнения линейчатых фотоприемников 5 и 6, а на фиг. 4 пример ее конструктивного исполнения. Необходимым условием применяемых там элементов Р1…Pn является их достаточно широкий угол обзора, требуемый для приема излучений от оптически сопряженных к соответствующему линейчатому приемнику излучателей 1, 2, 3, 4. Сигналы, снимаемые с выходов P1…Pn, образуют сигнальную шину данных - DBus, поступающую на вход главного процессора 8 для линейчатого приемника излучения 6 либо вход подчиненного процессора 9 для линейчатого приемника излучения 5.
Обозначим:
P(Ψi) - прямоугольная проекция потока Ψi на сенсорную плоскость 7,
P(Ψi)∩Р(Ψj) - пересечение проекций Р(Ψi) и P(Ψj).
Из фиг. 5 видно, что сенсорная поверхность 7 разбивается на четыре зоны - α, β, γ, δ. При этом зоны:
α≡P(Ψ1)∩Р(Ψ4);
β≡P(Ψ3)∩Р(Ψ4);
γ≡P(Ψ2)∩Р(Ψ3)
δ≡P(Ψ1)∩Р(Ψ2).
Видно, что:
- теневой сегмент  образуется пальцем 9, находящемся в зоне α, при действии оптического потока Ψ1,
образуется пальцем 9, находящемся в зоне α, при действии оптического потока Ψ1,
- теневой сегмент  образуется пальцем 9, находящемся в зоне δ, при действии оптического потока Ψ1,
образуется пальцем 9, находящемся в зоне δ, при действии оптического потока Ψ1,
- теневой сегмент  образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ2,
образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ2,
- теневой сегмент  образуется пальцем 9, находящемся в зоне δ, при действии оптического потока Ψ2,
образуется пальцем 9, находящемся в зоне δ, при действии оптического потока Ψ2,
- теневой сегмент  образуется пальцем 9, находящемся в зоне β, при действии оптического потока Ψ3,
образуется пальцем 9, находящемся в зоне β, при действии оптического потока Ψ3,
- теневой сегмент  образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ3,
образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ3,
- теневой сегмент  образуется пальцем 9, находящемся в зоне β, при действии оптического потока Ψ4,
образуется пальцем 9, находящемся в зоне β, при действии оптического потока Ψ4,
- теневой сегмент  образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ4.
образуется пальцем 9, находящемся в зоне γ, при действии оптического потока Ψ4.
Координаты центров теней, формируемых теневыми сегментами на поверхностях линейчатых фотоприемников, при касании пальцем сенсорной поверхности 7 в зонах α, β, γ, δ, имеют вид:
 - координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 5,
- координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 5,
 - координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 5,
- координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 5,
 - координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6,
- координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6,
 - координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 6,
- координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 6,
 - координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6.
- координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6.
Координаты оптических центров:
 - первого излучателя,
- первого излучателя,
 - второго излучателя,
- второго излучателя,
 - третьего излучателя,
- третьего излучателя,
 - четвертого излучателя.
- четвертого излучателя.
Фиг. 6 иллюстрирует пример формирования выходных сигналов фототранзисторов Р1…Pn при включенном 1-м излучателе и теневом сегменте  .
.
При этом сигналы u1…un имеют значения:
u1=1, …, uk-2=1, uk-1=1, uk=0, uk+1=0, uk+2=1, …, un=1.
Работа главного процессора (ГП) 8 и связанного с ним каналом связи подчиненного процессора (ПП) 9 осуществляется следующим образом, и иллюстрируется временной диаграммой, изображенной на фиг. 7.
В фазе Ф1, ГП 8, команды которого изображены сигналом CMDM, в момент времени t1 выполняет команду CM(t1), по которой формируется импульс включения третьего излучателя - сигнал I3. После окончания переходного процесса второго линейчатого приемника излучения 6 ГП 8 в момент времени t2 выполняет команду CM(t2), после чего им же, на линии передачи данных Тх, в направлении ПП 9, формируется команда - tx(t2). Приняв эту команду, ПП 9, выполняемые команды которого изображены сигналом CMDS, производит чтение информации со второго линейчатого приемника излучения 6, изображенное командой CS(t3). Далее ГП8 выполняет команду CM(t4), которая инициирует на линии передачи данных Tx, команду для ПП 9 - tx(t4). Приняв эту команду, ПП9 формирует, на линии приема данных Rx ГП 8, в момент времени t5, считанную им же информацию со второго линейчатого приемника излучения 6, изображенную как rx(t5). В момент времени t6, ГП 8 выполняет команду CM(t6), по которой формируется импульс включения четвертого излучателя - сигнал I4.
Далее ГП 8 в момент времени t7 выполняет команду CM(t7), после чего им же, на линии передачи данных Tx, формируется команда для ПП9 - tx(t7). Приняв эту команду, ПП9 производит чтение информации со второго линейчатого приемника излучения 6, изображенное командой CS(t8). Далее ГП 8 выполняет команду CM(t9), по которой на линии передачи данных Tx им же формируется команда для ПП 9 - tx(t9). Приняв эту команду, ПП 9 формирует на линии приема данных Rx, в момент времени t10, считанную им информацию со второго линейчатого приемника излучения 6, изображенную как rx(t10).
В фазе Ф2, ГП 8, в момент времени t11, выполняет команду CM(t11), после чего им же, на линии передачи данных Tx, формируется команда для ПП9 - tx(t11). Приняв ее, ПП9 выполняет команду CS(t12), которая вызывает формирование сигнала I1. В момент времени t13, ГП 8 выполняет команду CM(t13), которая инициирует чтение информации с первого линейчатого приемника излучения 5. Далее ГП 8 в момент времени t14 выполняет команду CM(t14), после чего им же, на линии передачи данных Tx, формируется команда для ПП9 - tx(t14). Приняв ее, ПП9 выполняет команду CS(t15), которая вызывает формирование сигнала I2. В момент времени t16, ГП 8 выполняет команду CM(t16), которая осуществляет чтение информации с первого линейчатого приемника излучения 5.
Таким образом, значения rx(t5) и rx(t10) содержат информацию о состоянии второго линейчатого приемника излучения 6, при падении на него потоков излучения последовательно третьего и четвертого излучателей 3 и 4, и формируются в фазе Ф1. А команды CM(t13) и CM(t16), сформированные в течение фазе Ф2, считывают в память ГП 8 значения состояния первого линейчатого приемника излучения 5 при падении на него потоков излучения последовательно первого и второго излучателей 1 и 2.
Обозначим:
M32[rx(t5)] - состояние второго линейчатого приемника излучения 6, при действии на него потока, формируемого третьим излучателем 3,
М42[rx(t10)] - состояние второго линейчатого приемника излучения 6, при действии на него потока, формируемого четвертым излучателем 4,
М11[CM(t13)] - состояние первого линейчатого приемника излучения 5, при действии на него потока, формируемого первым излучателем 1,
M12[CM(t16)] - состояние первого линейчатого приемника излучения 5, при действии на него потока, формируемого вторым излучателем 2.
Примем что:
где: F - функция преобразования выходных сигналов фотоприемников, входящих в состав линейчатого приемника излучения, в координату центра тени.
На фиг. 8 приведен алгоритм определения того, в какой из зон сенсорного поля 7 находится палец 10. Учитывая, что Х - координата центров теней на первом и втором линейчатых приемниках излучения, при условии их перпендикулярности оси ОХ, имеет фиксированные значения Х1 и Х2 соответственно, можно записать:
(Х1, Y11) - координата центра тени от действия первого излучателя на поверхности первого фотоприемника,
(X1, Y21) - координата центра тени от действия второго излучателя на поверхности первого фотоприемника,
(X2, Y32) - координата центра тени от действия третьего излучателя на поверхности второго фотоприемника,
(X2, Y42) - координата центра тени от действия четвертого излучателя на поверхности второго фотоприемника.
Полагается, что значениям Y11=0, Y21=0, Y32=0, Y42=0 соответствует отсутствие теней на поверхности первого или второго линейчатого приемника излучения.
Реализация этого алгоритма осуществляется в фазе Ф3 временной диаграммы фиг. 6. При этом, в блоке:
10 - начало,
11 - проверяется условие Y11=0,
12 - проверяется условие Y21=0,
13 - проверяется условие Y32=0,
14 - проверяется условие Y42=0,
15 - переменной zone присваивается значение δ,
переменной  присваивается значение (X1, Y11),
присваивается значение (X1, Y11),
переменной  присваивается значение (X1, X21),
присваивается значение (X1, X21),
16 - переменной zone присваивается значение α,
переменной  присваивается значение (Х1, Y11),
присваивается значение (Х1, Y11),
переменной  присваивается значение (X2, Y42),
присваивается значение (X2, Y42),
17 - переменной zone присваивается значение β,
переменной  присваивается значение (Х2, Y42),
присваивается значение (Х2, Y42),
переменной  присваивается значение (X2,X32),
присваивается значение (X2,X32),
18 - переменной zone присваивается значение γ,
переменной  присваивается значение (X2, Y32),
присваивается значение (X2, Y32),
переменной  присваивается значение (Х1, Y21),
присваивается значение (Х1, Y21),
19 - конец.
Расчет координат точки Π (положение пальца 10), сводится к нахождению точки (XП, YП) пересечения двух прямых, проходящих через точки (X*, Y*),  и (X**, Y**),
и (X**, Y**),  и имеет вид:
и имеет вид:


причем координаты точек (Х*, Y*),
и (X**, Y**),  , в системе координат OXY (фиг. 5), принадлежат:
, в системе координат OXY (фиг. 5), принадлежат:


Для расчета по формуле 2 в качестве (X*, Y*) и (X**, Y**) берется один из элементов, перечисленных в правых скобках 3, с учетом того, в какой зоне (α, β, γ, δ, определенной в алгоритме фиг. 7) находится палец 10 - выбирается пара координат с соответствующим верхним индексом. Аналогично, в качестве  и
и  , берется один из элементов, перечисленных в правых скобках 4, с учетом того, какие излучатели участвуют в создании тени на поверхности линейчатых приемников излучений 5 и 6 - выбирается пара координат с соответствующим нижним индексом.
, берется один из элементов, перечисленных в правых скобках 4, с учетом того, какие излучатели участвуют в создании тени на поверхности линейчатых приемников излучений 5 и 6 - выбирается пара координат с соответствующим нижним индексом.
Таким образом, пересечение пальцем какой либо пары потоков Ψ1, Ψ2, Ψ3, Ψ4, возникающее при касании пальцем 10 поверхности 7, и следующее при этом образование теней на поверхностях первого и второго линейчатых приемников излучения 5 и 6, позволяет определить координаты пальца, т.е. делает эту поверхность «сенсорной».
Вычисления по формулам 1 и 2, с учетом условий 3 и 4, выполняются в фазе Ф3 ГП 8. В этой же фазе осуществляется вывод информации о положении пальца на сенсорной поверхности 7 в пользовательское программное обеспечение, в частности в персональный компьютер, смартфон и т.п.
На функциональной схеме фиг. 9, для организации связи между главным и подчиненным процессорами 8 и 9, введены радиочастотные приемопередатчики 11 и 12. В их качестве могут использоваться, например, радиочастотные модули фирмы Nordic Semiconductor, номенклатура которых представлена в [7], либо конкретный радиочастотный модуль, представленный в [8].
Для введения в устройство свойства мобильности устройство может быть выполнено в виде двух не связанных друг с другом электрическими соединениями модулей. В первом размещается главный процессор 8, второй линейчатый приемник излучения 6, первый и второй излучатели 1 и 2 и первый радиочастотный приемопередатчик 20. Во втором блоке размещается подчиненный процессор 9, первый линейчатый приемник излучения 5, третий и четвертый излучатели 3 и 4 и второй радиочастотный приемопередатчик 21. Дополнительно в каждом модуле должны находиться источники электропитания, например аккумуляторы. Такое выполнение оптического сенсорного устройства позволяет пользователю легко изменять относительное положение первого и второго модулей, увеличивая или уменьшая размер формируемой сенсорной поверхности.
Для связи с персональным компьютером, смартфоном, планшетом и т.п. устройство может быть снабжено Wi-Fi или Bluetooth модулем.
На фиг. 10 приведена 3D-модель оптического устройства формирования сенсорной поверхности, выполненная в виде двух модулей, каждый из которых содержит 80 фототранзисторов (Р1…P80) первого и второго линейчатых приемников излучения, где:
PCB1, PCB2 - печатные платы первого и второго модулей,
A1, A2 - аккумуляторы питания первого и второго модулей,
ВТ - Bluetooth модуль.
Источники информации
1. Патент США №7006236 В2 от 28.02.2006 г.
2. Патент США №6480187 от 12.11.2002 г.
3. Патент США №6492633 от 10.12.2002 г.
4. Патент США №6844539 от 18.01.2005 г.
5. Патент США №7522156 от 21.04.2009 г.
6. Патент РФ №2278423 от 20.06.2006 г.
7. Ultra low power wireless solutions.
http://www.nordicsemi.com/eng/Products8.
8. nRF24L01. Single Chip 2.4GHz Transceiver Product Specification Revision 2.0. http://www.nordicsemi.com/eng/content/download/2730/34105/file/nRF24L01_Product_Specification_v2_0.pdf
Устройство для создания сенсорной поверхности
Устройство для организации интерфейса с объектом виртуальной реальности
Устройство для организации трехмерного пользовательского интерфейса
Устройство для управления транспортным средством
Сенсорная панель на основе световодов
Оптическое сенсорное устройство
Сенсорное устройство с измерением динамического воздействия
Устройство для измерения координат
Способ управления положением бокового автомобильного стекла и устройство для его реализации
Мобильное устройство для организации сенсорной плоскости
Устройство для создания сенсорной поверхности
Устройство для организации интерфейса с объектом виртуальной реальности
Устройство для организации трехмерного пользовательского интерфейса
Устройство для управления транспортным средством
Сенсорная панель на основе световодов
Оптическое сенсорное устройство
Сенсорное устройство с измерением динамического воздействия
Устройство для измерения координат
Способ управления положением бокового автомобильного стекла и устройство для его реализации
Мобильное устройство для организации сенсорной плоскости

