Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА
Вид РИД
Изобретение
Изобретение относится к машиностроению и может быть использовано в роторных механизмах на электромагнитных опорах.
Наиболее близким по технической сущности является система управления электромагнитным подвесом ротора (см. патент Российской Федерации № 2395150, опубл. 20.07.2010, бюл. № 20), в которой каждый канал системы управления содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференцирующее звено, пропорционально-дифференциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком наиболее близкой системы управления электромагнитным подвесом ротора является то, что в режиме всплытия со страховочных подшипников при настройках регуляторов, выбранных из условия обеспечения высокого быстродействия, она становится неустойчивой. В результате приходится заведомо снижать быстродействие системы для обеспечения работоспособности электромагнитного подвеса во всех режимах.
Сущность изобретения заключается в том, что в системе управления электромагнитным подвесом ротора, каждый канал которой содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференцирующее звено, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, причем выход датчика положения ротора соединен с инверсными входами интегрального и пропорционального регуляторов и входом дифференцирующего звена, выход пропорционального регулятора соединен с прямым входом пропорционально-дифференциального регулятора, инверсный вход которого соединен с выходом дифференцирующего звена, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, каждый канал дополнительно снабжен блоком задания, пропорциональным звеном, первым и вторым блоками вычитания, блоком выделения знака, регистром, сумматором и мультиплексором, причем первый выход блока задания соединен с входом пропорционального звена и первым входом первого блока вычитания, выход датчика положения ротора соединен с вторым входом первого блока вычитания, выход которого соединен с входом блока выделения знака, выход интегрального регулятора соединен с первыми входами второго блока вычитания и регистра, выход которого соединен с первым входом сумматора, второй выход блока задания соединен с первым входом мультиплексора, выход пропорционального звена соединен с вторым входом сумматора, выход которого соединен с вторым входом мультиплексора, выход блока выделения знака соединен с вторым входом регистра и третьим входом мультиплексора, выход которого соединен с вторым входом второго блока вычитания, а выход второго блока вычитания соединен с прямым входом пропорционального регулятора.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет повысить быстродействие и динамическую точность системы управления электромагнитным подвесом ротора.
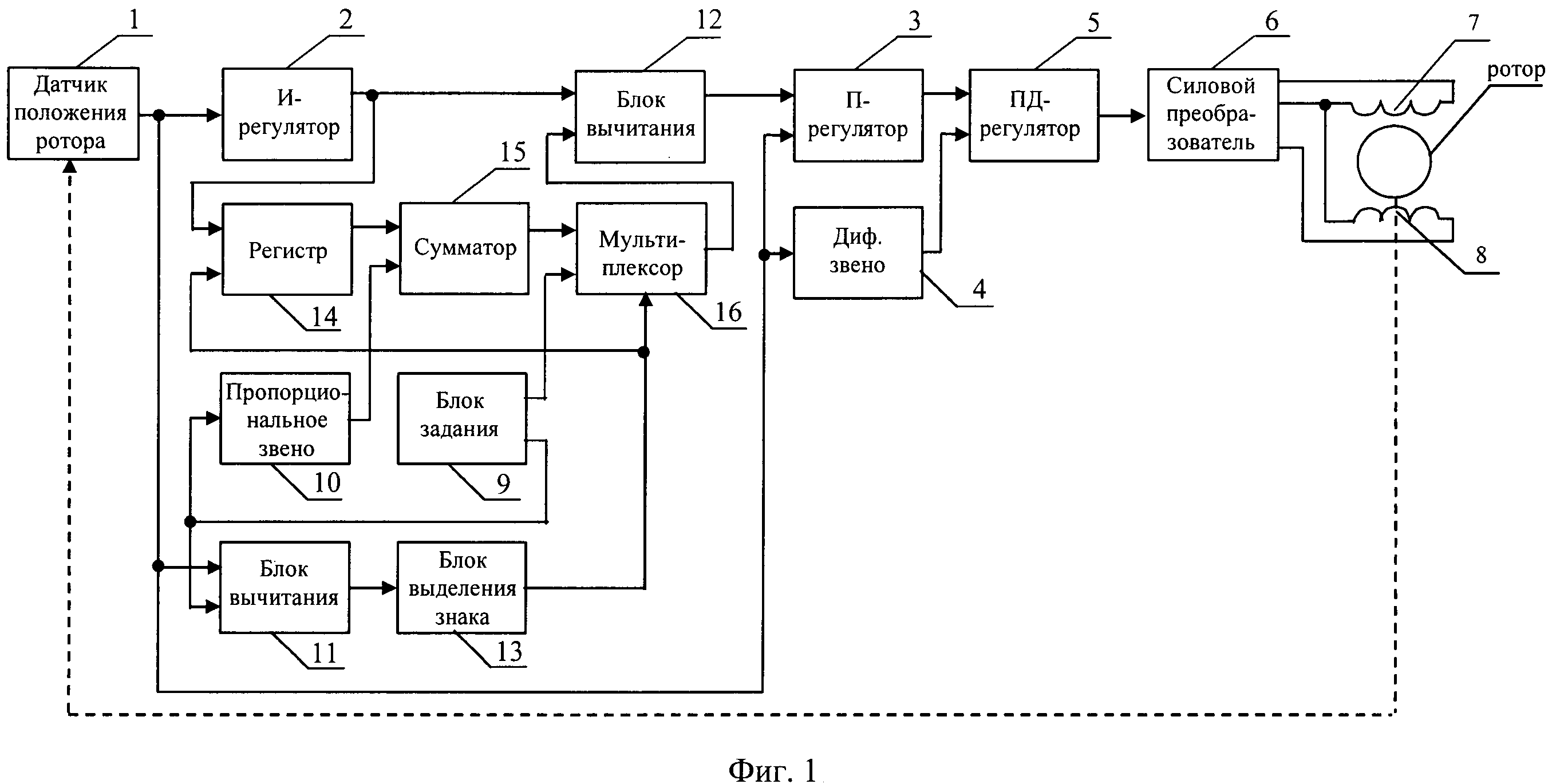
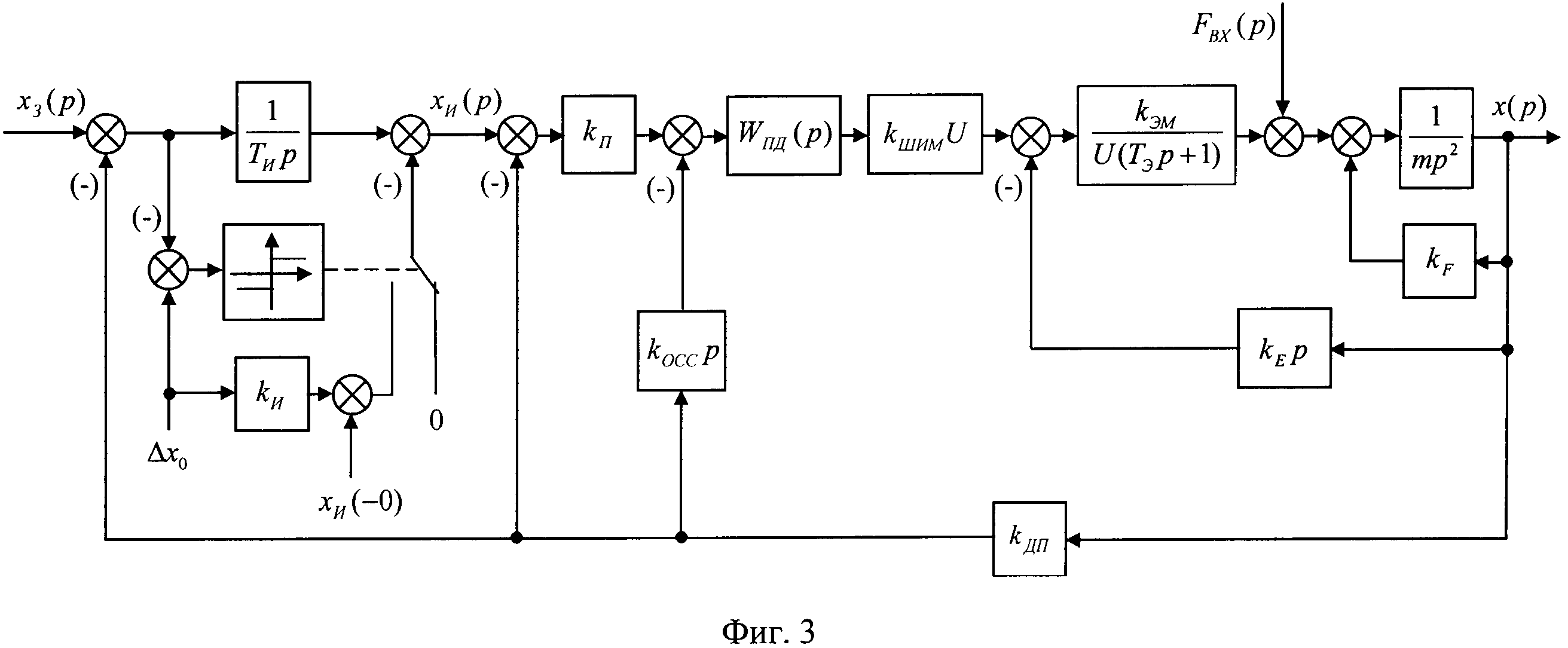
На фиг. 1 представлена функциональная схема каждого канала системы управления электромагнитным подвесом ротора; на фиг. 2 изображено подключение обмоток электромагнитов к силовому преобразователю; на фиг. 3 представлена структурная схема одного канала системы управления электромагнитным подвесом ротора; на фиг. 4 приведены графики переходных процессов в системе управления электромагнитным подвесом ротора.
Каждый канал системы управления (фиг. 1) содержит датчик 1 положения ротора, интегральный регулятор 2, пропорциональный регулятор 3, дифференцирующее звено 4, пропорционально-дифференциальный регулятор 5, силовой преобразователь 6, два электромагнита 7 и 8, блок 9 задания, пропорциональное звено 10, блоки 11 и 12 вычитания, блок 13 выделения знака, регистр 14, сумматор 15 и мультиплексор 16. Датчик 1 положения ротора соединен с инверсными входами интегрального 2 и пропорционального 3 регуляторов и входом дифференцирующего звена 4. Выход пропорционального регулятора 3 соединен с прямым входом пропорционально-дифференциального регулятора 5, инверсный вход которого соединен с выходом дифференцирующего звена 4. Выход пропорционально-дифференциального регулятора 5 соединен с входом силового преобразователя 6, к выходу которого подключены обмотки электромагнитов 7 и 8. Первый выход блока 9 задания соединен с входом пропорционального звена 10 и первым входом блока 11 вычитания. Выход датчика 1 положения ротора соединен с вторым входом блока 11 вычитания, выход которого соединен с входом блока 13 выделения знака. Выход интегрального регулятора соединен с первыми входами 12 блока вычитания и регистра 14, выход которого соединен с первым входом сумматора 15. Второй выход блока 9 задания соединен с первым входом мультиплексора 16. Выход пропорционального звена 10 соединен с вторым входом сумматора 15, выход которого соединен с вторым входом мультиплексора 16. Выход блока 13 выделения знака соединен с вторым входом регистра 14 и третьим входом мультиплексора 16, выход которого соединен с вторым входом блока 12 вычитания. Выход блока 12 вычитания соединен с прямым входом пропорционального регулятора 3.
Интегральный регулятор 2, пропорциональный регулятор 3, дифференцирующее звено 4, пропорционально-дифференциальный регулятор 5 и пропорциональное звено 10 могут быть реализованы, например, по а.с. СССР №1649501, опубл. 15.05.91, бюл. № 18. Блок 9 задания параметров может быть выполнен, например, на микросхемах К555ТМ8, разрядные входы которых подключаются с помощью переключателей к логическим нулям или единицам. Блоки 11 и 12 вычитания и сумматор 15, например, выполнены на микросхемах К555ИМ6. Блок 13 выделения знака может быть реализован, например, в виде триггера, подключенного к старшему разряду выхода блока 11 вычитания. Регистр 14, например, может быть выполнен на микросхемах К555ТМ8. Мультиплексор 16, может быть реализован, например, на микросхемах К555КП11. Перечисленные выше блоки системы управления электромагнитным подвесом ротора могут быть также выполнены программно на микропроцессоре или программируемом контроллере. В качестве датчика 1 положения ротора может быть применен, например, индуктивный токовихревой датчик с блоком измерения, выполненным, например, по патенту РФ №2191346, опубл. 20.10.2002, бюл. №29. Силовой преобразователь 6, например, представляет собой транзисторный широтно-импульсный преобразователь, состоящий из широтно-импульсного модулятора (см. патент России №2172062, опубл. 10.08.2001, бюл. №22) и транзисторного моста. Электромагниты 7 и 8 располагаются на статоре роторной машины, например, на одной оси с противоположных сторон от ротора и могут быть выполнены, например, как явнополюсные или с распределенными обмотками. Обмотки электромагнитов подключаются к транзисторному мосту, например, как показано на фиг. 2.
Система управления электромагнитным подвесом ротора работает следующим образом. В каждом канале управления датчик 1 положения ротора измеряет отклонение ротора от центрального положения, принятого за нулевое. Сигнал об измеренном отклонении подается на инверсные входы интегрального и пропорционального регуляторов 2 и 3 и на вход дифференцирующего звена 4. В соответствии с передаточными функциями, реализованными регуляторами 2, 3 и 5, дифференцирующим звеном 4, пропорциональным звеном 10, блоками 11 и 12 вычитания, блоком 13 выделения знака, регистром 14, сумматором 15 и мультиплексором 16, с выхода пропорционально-дифференциального регулятора 5 на вход силового преобразователя 6 подается сигнал, пропорционально которому силовой преобразователь 6 регулирует напряжения на обмотках электромагнитов 7 и 8. В результате в обмотках электромагнитов 7 и 8 формируются такие токи, которые создают результирующую силу, возвращающую ротор в центральное (по датчику 1) положение.
Процессы, протекающие при работе предложенной системы управления электромагнитным подвесом ротора, можно представить структурной схемой (фиг. 3). Здесь kДП - коэффициент передачи датчика 1 положения;  - передаточная функция интегрального регулятора 2; kП - коэффициент передачи пропорционального регулятора 3; kOCC - коэффициент передачи (постоянная времени) дифференцирующего звена 4; WПД(p) - передаточная функция пропорционально-дифференциального регулятора 5; kИ - коэффициент передачи пропорционального звена 10; хЗ(p), FB(p) и х(р) - изображения сигналов задания, возмущающей силы и перемещения (отклонения от центрального положения) ротора, соответственно. Причем, для системы управления электромагнитным подвесом ротора принципиально хЗ(p)=0. Δх0 - величина рассогласования, задаваемая блоком 9 задания. хИ(-0) - значение выходного сигнала интегрального регулятора, фиксируемое регистром 14 в момент смены знака на выходе блока 11 вычитания. Блок 9 задания также формирует нулевой сигнал на соответствующем входе мультиплексора 16. Мультиплексор 16 представлен на структурной схеме переключателем, управляемым нелинейным звеном, представляющим собой блок 13 выделения знака.
- передаточная функция интегрального регулятора 2; kП - коэффициент передачи пропорционального регулятора 3; kOCC - коэффициент передачи (постоянная времени) дифференцирующего звена 4; WПД(p) - передаточная функция пропорционально-дифференциального регулятора 5; kИ - коэффициент передачи пропорционального звена 10; хЗ(p), FB(p) и х(р) - изображения сигналов задания, возмущающей силы и перемещения (отклонения от центрального положения) ротора, соответственно. Причем, для системы управления электромагнитным подвесом ротора принципиально хЗ(p)=0. Δх0 - величина рассогласования, задаваемая блоком 9 задания. хИ(-0) - значение выходного сигнала интегрального регулятора, фиксируемое регистром 14 в момент смены знака на выходе блока 11 вычитания. Блок 9 задания также формирует нулевой сигнал на соответствующем входе мультиплексора 16. Мультиплексор 16 представлен на структурной схеме переключателем, управляемым нелинейным звеном, представляющим собой блок 13 выделения знака.
Остальные динамические звенья в совокупности представляют собой линеаризованную математическую модель процесса перемещения ротора в поле электромагнитного подшипника под действием управляющего сигнала на входе силового преобразователя 6. Коэффициенты передачи kШИМ и U характеризуют параметры силового преобразователя 6: коэффициент передачи широтно-импульсного преобразователя и напряжение питания транзисторного моста.
Динамическое звено с передаточной функцией  (ТЭ - постоянная времени электрической цепи обмоток электромагнитов) связывает приращение соотношения токов в электромагнитах 7 и 8 с приращением напряжения на обмотках, причем заведомо принимается такой закон коммутации транзисторов моста, что увеличение напряжение на одной из обмоток приводит к такому же уменьшению напряжения на другой. Коэффициент передачи kЭМ связывает силу, действующую со стороны электромагнитов на ротор при его центральном положении, с соотношением токов в электромагнитах. Коэффициент передачи kF характеризует изменение силы, действующей на ротор, при его отклонении от центрального положения. Динамическое звено
(ТЭ - постоянная времени электрической цепи обмоток электромагнитов) связывает приращение соотношения токов в электромагнитах 7 и 8 с приращением напряжения на обмотках, причем заведомо принимается такой закон коммутации транзисторов моста, что увеличение напряжение на одной из обмоток приводит к такому же уменьшению напряжения на другой. Коэффициент передачи kЭМ связывает силу, действующую со стороны электромагнитов на ротор при его центральном положении, с соотношением токов в электромагнитах. Коэффициент передачи kF характеризует изменение силы, действующей на ротор, при его отклонении от центрального положения. Динамическое звено  в соответствии со вторым законом Ньютона определяет перемещение ротора под действием результирующей силы. Коэффициент передачи kE характеризует приращение наводимой в обмотках электромагнитов ЭДС со скоростью перемещения ротора в магнитном поле.
в соответствии со вторым законом Ньютона определяет перемещение ротора под действием результирующей силы. Коэффициент передачи kE характеризует приращение наводимой в обмотках электромагнитов ЭДС со скоростью перемещения ротора в магнитном поле.
Величина постоянная времени пропорционально-дифференциального регулятора 5
WПД(р)=kПД(TПДp+1)
определяется, например, из соотношения
ТПД=3ТЭ,
а коэффициент передачи kПД этого регулятора может варьироваться в широких пределах. Величины коэффициента передачи kП пропорционального регулятора 3 и постоянной времени ТИ интегрального регулятора 2 в соответствии с условием устойчивости также могут выбираться из широкого ряда значений.
Особенность предлагаемой системы управления электромагнитным подвесом заключается в том, что в момент включения на выходе блока 12 вычитания присутствует нулевой сигнал. В процессе всплытия ротора выходной сигнал блока 12 вычитания изменяется в зависимости от выходного сигнала интегрального регулятора 2. В момент времени, когда рассогласование на входе интегрального регулятора сравняется или станет меньше величины Δх0, выходной сигнал блока 13 выделения меняет свой статус, в регистр 14 записывается величина хИ(-0) с выхода интегрального регулятора 2. Эта величина с помощью сумматора 15 складывается с произведением kИΔх0. Одновременно мультиплексор 16 переключается и пропускает на вход блока 12 вычитания выходной сигнал сумматора 15, который в этот момент стал равным сумме хИ(-0)+kИΔх0. В результате на выходе блока 12 вычитания в момент переключения мультиплексора 16 появляется сигнал, равный -kИΔх0. Дальнейшее изменение выходного сигнала блока 12 вычитания определяется только работой интегрального регулятора 2. Произведенные действия дополнительно введенными в систему управления электромагнитным подвесом ротора блоками 9-16 позволяет добиться устойчивой работы без изменения постоянной времени ТИ интегрального регулятора 2 за счет лишь разовой адаптации выходного сигнала этого регулятора. Величина коэффициента kИ передачи пропорционального звена 10 может выбираться, например, из соотношения

где k1=kПДkШИМkЭМkOCCkДП, k2=kПkПДkШИМkЭМkДП.
Моделирование на компьютере показывает достижимые показатели предлагаемой системы управления электромагнитным подвесом ротора.
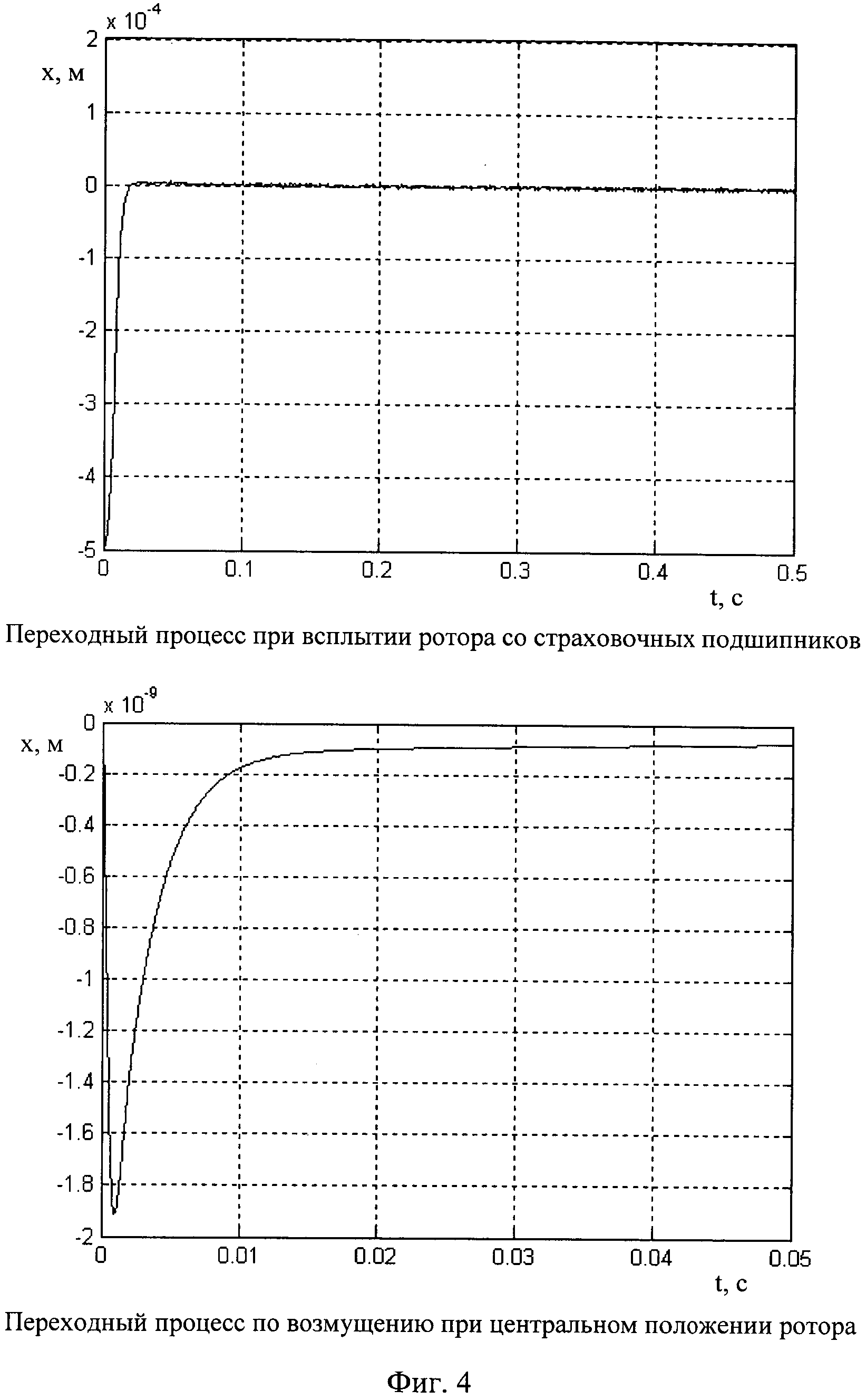
На фиг.4 приведены графики переходных процессов при всплытии ротора со страховочных подшипников и при действии возмущающей силы при исходном центральном положении ротора. В расчетах приняты следующие параметры электромагнитного подвеса ротора, например, турбины: kЕ=1461 Вс/м; kЭМ=1306 Н; kF=1315900 Н/м; m=36 кг; ТЭ=0,038233 с; kШИМ=1,9608·10-3; U=57,7 В; kПД=8; ТПД=0,115 с; kП=8; kОСС=0,0032 с; kИ=0,843; ТИ=0,0032 с; kДП=1000000 дискрет/м; Δх0=250 дискрет.
Анализ графиков показывает, что в системе управления электромагнитным подвесом ротора наблюдается высокое быстродействие во всех режимах работы. Ротор всплывает со страховочных подшипников, имеющих зазор в рабочем состоянии δ=0,5 мм, за время tПП=0,03 с. Динамический провал ротора при ударном приложении силы в 1 Н составляет Δxmax=0,002 мкм. Следует также отметить, что ротор возвращается в центральное положение после приложения нагрузки. Достичь такого быстродействия в системе управления, взятой за прототип, невозможно.
Таким образом, предложенная система управления позволяет повысить быстродействие и динамическую точность электромагнитного подвеса ротора.
Система управления электромагнитным подвесом ротора, каждый канал которой содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференцирующее звено, пропорционально-дифференциальный регулятор, силовой преобразователь, два электромагнита, причем выход датчика положения ротора соединен с инверсными входами интегрального и пропорционального регуляторов и входом дифференцирующего звена, выход пропорционального регулятора соединен с прямым входом пропорционально-дифференциального регулятора, инверсный вход которого соединен с выходом дифференцирующего звена, выход пропорционально-дифференциального регулятора соединен с входом силового преобразователя, к выходу которого подключены обмотки электромагнитов, отличающаяся тем, что каждый канал дополнительно снабжен блоком задания, пропорциональным звеном, первым и вторым блоками вычитания, блоком выделения знака, регистром, сумматором и мультиплексором, причем первый выход блока задания соединен с входом пропорционального звена и первым входом первого блока вычитания, выход датчика положения ротора соединен с вторым входом первого блока вычитания, выход которого соединен с входом блока выделения знака, выход интегрального регулятора соединен с первыми входами второго блока вычитания и регистра, выход которого соединен с первым входом сумматора, второй выход блока задания соединен с первым входом мультиплексора, выход пропорционального звена соединен с вторым входом сумматора, выход которого соединен с вторым входом мультиплексора, выход блока выделения знака соединен с вторым входом регистра и третьим входом мультиплексора, выход которого соединен с вторым входом второго блока вычитания, а выход второго блока вычитания соединен с прямым входом пропорционального регулятора.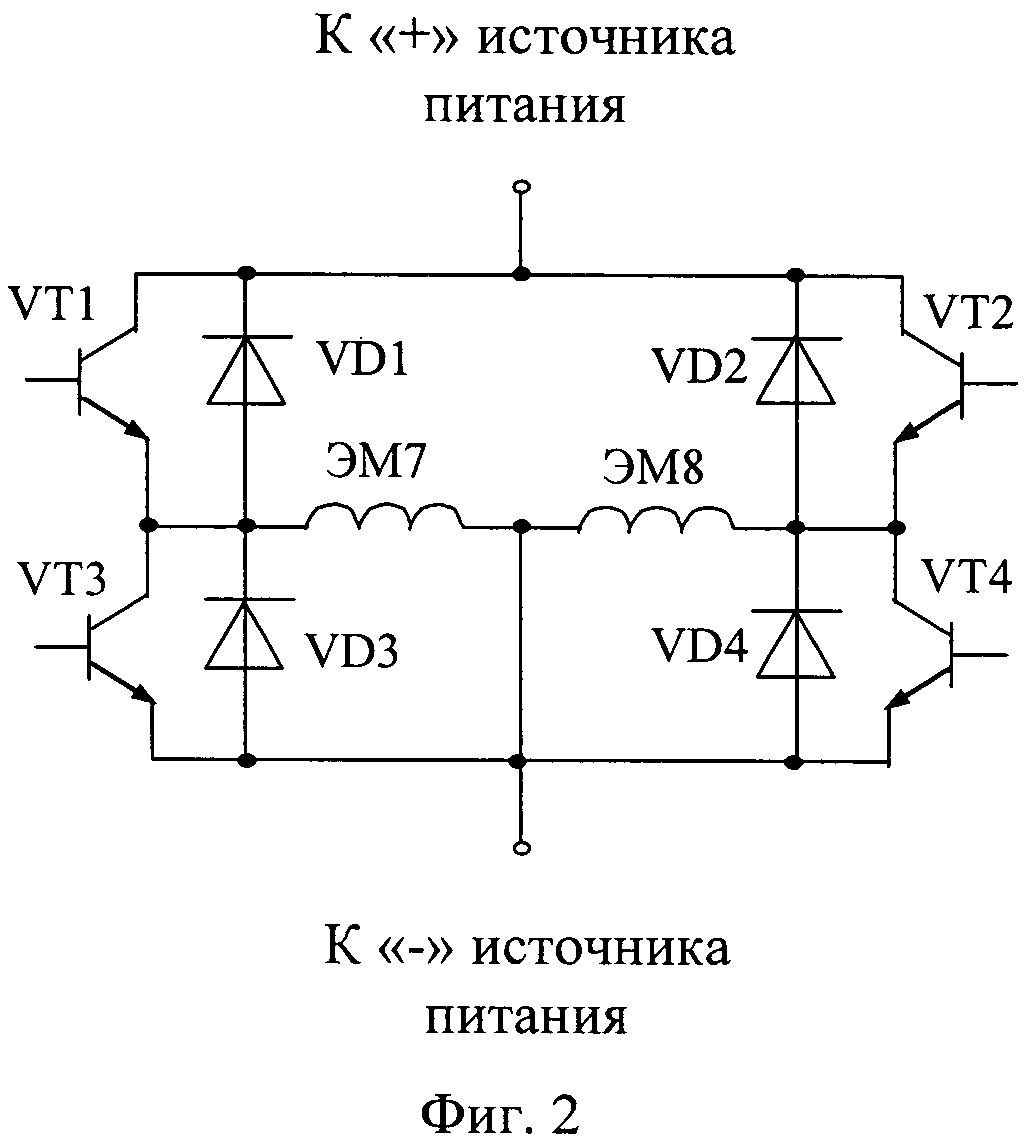
Цифровой регулятор для системы управления электромагнитным подшипником
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для силового преобразователя электромагнитного подшипника
Цифровой широтно-импульсный модулятор
Система управления погружным электроцентробежным насосом и кустовой насосной станцией
Система управления погружным электроцентробежным насосом
Следящий электропривод
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для преобразования частоты
Способ совместной переработки кальцийсодержащего и сульфатсодержащего отходов
Высокочастотная форсунка
Способ регенерации калиевой селитры
Способ работы парогазовой энергетической установки и устройство для его осуществления
Шихта для получения тарного стекла
Способ испытания материалов на фреттинг-усталость
Способ работы теплоэлектроцентрали с открытой теплофикационной системой
Контактная система вакуумного выключателя
Катализатор, способ его приготовления и процесс селективного гидрообессеривания олефинсодержащего углеводородного сырья
Способ и устройство для непрерывного электро- и теплоснабжения загородных жилых домов

