Результат интеллектуальной деятельности: МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ)
Вид РИД
Изобретение
Область техники
Изобретение относится к области микроробототехники, в которой основными подвижными элементами конструкции являются устройства микросистемной техники, выполненные по технологиям микрообработки кремния, и может быть использовано при создании систем, предназначенных для инспектирования оборудования, находящегося в труднодоступных областях космических аппаратов, за счет управляемого перемещения не менее чем в двух направлениях, возможности переноса полезной нагрузки и функционирования в условиях космического пространства.
Уровень техники
Из уровня техники известно устройство «Thermal-Powered, Insectlike Robot», представляющее собой подвижной робот, перемещающийся по разнородным поверхностям и способный перевозить груз, во много раз превышающий его вес [Л1]. Конструкция устройства представляет собой два массива термомеханических биморфных актюаторов, соединенных между собой платой с электропроводящими дорожками и расположенных крестообразно в группах по четыре штуки. Каждый из таких массивов образует подвижную ногу робота, позволяя ему перемещаться по ровным поверхностям за счет попеременного включения каждого из актюаторов. Термомеханические актюаторы в такой конструкции образованы двумя слоями полиимида с различными температурными коэффициентами линейного расширения. Данный робот позволяет перемещаться по четырем направлениям в плоскости со
скоростью до 3 футов в час и выдерживает полезную нагрузку, до 7 раз превышающую собственный вес.
Недостатками известного технического решения являются невозможность перемещения по неплоским поверхностям со ступенчатой неровностью, низкое значение деформации подвижных балок, низкая скорость перемещения робота по поверхности, невозможность перемещения по наклонным поверхностям.
Из уровня техники известно устройство «A walking silicon micro-robot», представляющее собой шагающий робот, выполненный на кремниевой подложке со сформированными в ней в два ряда термомеханическими актюаторами с V-образными канавками, заполненными полиимидом [Л2]. Двигаясь по заданному алгоритму, актюаторы, разделенные на два канала управления, обеспечивают управляемое двунаправленное перемещение робота в плоскости. Подобное решение позволяет достичь высокого рабочего ресурса благодаря используемым актюаторам, способным выдерживать более 200 миллионов циклов срабатывания, что эквивалентно 7 км пройденного пути, робот способен выдерживать полезную нагрузку весом, до 30 раз превышающим свой собственный, а перемещение робота за один цикл составляет величину до 400 мкм при скорости перемещения до 6 мм/сек.
К основным недостаткам известной конструкции относятся невозможность перемещения по наклонным поверхностям, по поверхностям со ступенчатой неровностью, а также ограниченность перемещения двумя направлениями движения.
Из уровня техники известно устройство «Microid microrobot», сочетающее в себе подвижные пьезоэлектрические элементы, установленные на платформе с контроллером и источником питания [Л3]. Пьезоэлектрические актюаторы, используемые в роботе, способны перемещаться в двух плоскостях в двух взаимно обратных направлениях в каждой из них. Микроробот содержит 6 подобных актюаторов по бокам подвижной платформы и 2 актюатора сзади.
Это позволяет микророботу осуществлять линейное перемещение и разворот. Перемещение каждой из конечностей доходит до 100 мкм при напряжении питания на ней 40 В, шаг перемещения робота - 200 мкм. Зазор между микророботом и поверхностью, по которой он перемещается, не более 100 мкм, скорость перемещения до 0,75 м/сек, максимальная нагрузка на один актюатор порядка 0,8 мН.
Основным недостатком данного устройства является сложность в технологии изготовления, обусловленная необходимостью хорошей диэлектрической защиты от пробоя цепи высокого напряжения и сложностью размещения и изготовления источника питания высокого напряжения, а также ограничения при перемещении по ступенчатым и неровным поверхностям.
Из уровня техники известно устройство «Microcrawler and conveyor robot», способное перемещать на себе систему управления, источник питания и прочую полезную нагрузку [Л4]. Робот имеет в своем составе 6 ног, сформированных в структуре подложки и расположенных в 2 ряда по 3 ноги в каждом из них. К каждой ноге механически прикреплен актюатор, перемещаемый в плоскости несущей поверхности в направлениях, соответствующих прямому/обратному движению робота. Ноги расположены в направляющих перпендикулярно плоскости несущей поверхности. Благодаря актюаторам ноги могут приходить в движение в двух противоположных направлениях. Организуя попеременное перемещение ног, робот приходит в движение. Изменяя частоту срабатывания и напряжение в каждом из рядов в отдельности, возможно регулировать угол отклонения от прямолинейной траектории перемещения робота. Предложенное устройство имеет габариты 15×15×0,5 мм, скорость перемещения до 1,55 мм/сек и максимальную выдерживаемую нагрузку в 9 г при собственном весе в 3,8 г.
Основным недостатком данного устройства является невозможность перемещения по сильно шероховатым, неровным и ступенчатым поверхностям, а также технологическая сложность изготовления устройства, обусловленная
необходимостью формирования тонкостенных элементов, расположенных перпендикулярно плоскости подложки.
Раскрытие изобретения
Техническим результатом заявленного изобретения является:
- расширение функциональных возможностей за счет передвижения по поверхностям с ненулевым наклоном, передвижения по поверхностям с различной степенью шероховатости и неровности, в том числе преодоление ступенчатых неровностей, передвижения по четырем направлениям (вперед/назад, влево/вправо);
- работоспособность микросистемного робота в условиях космического пространства, а также устойчивость к жестким температурным условиям эксплуатации;
- увеличение надежности за счет применения термомеханических актюаторов, устойчивых к многократным изгибам;
- увеличение скорости передвижения микросистемного робота за счет совместного использования разноразмерных подвижных исполнительных элементов в виде термомеханических актюаторов;
- возможность изготовления микросистемного космического робота-инспектора в 2 вариантах по стандартным технологиям микрообработки кремния и механообработки элементов конструкции.
В первом варианте исполнения микросистемного космического робота-инспектора технический результат достигается тем, что он содержит:
- несущую платформу с располагаемыми на ней блоками функциональной нагрузки;
- подвижные исполнительные элементы в виде термомеханических актюаторов в количестве не менее 8, закрепленные с нижней стороны несущей платформы, каждый из которых разделен на две: основную и дополнительную
деформируемые зоны с канавками, соединенные гибкой полиимидной вставкой, при этом канавки в деформируемых зонах термомеханических актюаторов обращены в противоположные направления, на дополнительную деформируемую зону с нижней стороны в месте соприкосновения с поверхностью нанесен адгезионный слой, термомеханические актюаторы расположены как минимум в двух параллельных рядах, образующих как минимум две подвижные «ноги» в каждом из рядов, при этом в каждом ряду как минимум 4 термомеханических актюатора, при этом каждая пара термомеханических актюаторов в ряду расположена под углом 180 градусов друг к другу в горизонтальной плоскости и образует подвижную «ногу» микросистемного космического робота-инспектора;
- источник питания.
В предпочтительном варианте, адгезионный слой представляет собой «сухой» адгезив многократного действия. Источник питания расположен на несущей платформе в случае автономного использования, либо отдельно от нее в случае управления посредством проводного соединения. Дополнительная деформируемая зона термомеханического актюатора обеспечивает прижим/отжим «ноги» микросистемного космического робота-инспектора к/от поверхности под углом. Основная деформируемая зона термомеханического актюатора обеспечивает основное перемещение несущей платформы с располагаемыми на ней блоками функциональной нагрузки. Термомеханические актюаторы выполнены в виде сформированной в меза-структуре упруго-шарнирной консольной балки, состоящей из гибких параллельных трапециевидных вставок из монокристаллического кремния с ориентацией [100], расположенных перпендикулярно основной оси консольной балки и соединенных полиимидными прослойками, образованными полиимидной пленкой, нагревателя и металлизации нагревателя, при этом полиимидная пленка выполнена из слоя полипиромеллитимида, прилегающего к гибким параллельным трапециевидным вставкам. Гибкая полиимидная вставка, соединяющая основную и дополнительную деформируемые зоны, представляет собой шарнир, имеющий в сечении прямоугольную или трапециевидную форму, с толщиной, не превышающей толщину хвостовика термомеханического актюатора. В состав блоков функциональной нагрузки входят по отдельности, выборочно или совместно: блок беспроводного приема и передачи данных, блок регистрации визуальной информации, а также блок управления перемещением подвижных термомеханических актюаторов с обратной связью. Полиимидные прослойки, образованные полиимидной пленкой между гибкими параллельными трапециевидными вставками, выполнены в V-образной или трапециевидной форме в поперечном сечении с расстоянием между соседними гибкими параллельными трапециевидными вставками, равным или отличным от нуля. Каждый термомеханический актюатор имеет количество каналов управления равное 2, каждая подвижная «нога» имеет количество каналов управления равное 4, алгоритм управления задается попеременным включением каждого из каналов управления в определенной последовательности. Термомеханические актюаторы выполнены с возможностью углового перемещения на угол не менее 30 градусов. Дополнительно и перпендикулярно имеющейся группе термомеханических актюаторов располагается дублирующая их группа термомеханических актюаторов, организующая перемещение несущей платформы с располагаемыми на ней блоками функциональной нагрузки в перпендикулярном направлении, при этом в соприкосновении с поверхностью могут находиться только термомеханические актюаторы одной из групп. Дополнительно включены датчики обратной связи.
Во втором варианте исполнения микросистемного космического робота-инспектора технический результат достигается тем, что он содержит:
- несущую платформу с располагаемыми на ней блоками функциональной нагрузки;
- подвижные исполнительные элементы в виде термомеханических актюаторов в количестве не менее 8, закрепленные с нижней стороны несущей платформы, каждый из которых разделен на две: основную и дополнительную деформируемые зоны с канавками, соединенные гибкой полиимидной вставкой, при этом основная деформируемая зона образует сплошной термомеханический актюатор, а дополнительная деформируемая зона образует массив однотипных термомеханических актюаторов меньшего размера, расположенных в параллельных рядах на поверхности этой деформируемой зоны и обращенных хвостовиками вниз, при этом на каждом из хвостовиков термомеханических актюаторов меньшего размера нанесен с нижней стороны в месте соприкосновения с поверхностью адгезионный слой, соседние термомеханические актюаторы меньшего размера повернуты друг к другу под углом 180 градусов, количество термомеханических актюаторов меньшего размера в рядах, равное и не менее 6 в каждом из рядов, термомеханические актюаторы расположены как минимум в двух параллельных рядах, образующих как минимум две подвижные «ноги» в каждом из рядов, при этом в каждом ряду как минимум 4 термомеханических актюатора, при этом каждая пара термомеханических актюаторов в ряду расположена под углом 180 градусов друг к другу в горизонтальной плоскости и образует подвижную «ногу» микросистемного космического робота-инспектора;
- источник питания.
В предпочтительном варианте, адгезионный слой представляет собой «сухой» адгезив многократного действия. Источник питания расположен на несущей платформе в случае автономного использования, либо отдельно от нее в случае управления посредством проводного соединения. Дополнительная деформируемая зона термомеханического актюатора обеспечивает прижим/отжим «ноги» микросистемного космического робота-инспектора к/от поверхности под углом. Основная деформируемая зона термомеханического
актюатора обеспечивает основное перемещение несущей платформы с располагаемыми на ней блоками функциональной нагрузки. Термомеханические актюаторы выполнены в виде сформированной в меза-структуре упруго-шарнирной консольной балки, состоящей из гибких параллельных трапециевидных вставок из монокристаллического кремния с ориентацией [100], расположенных перпендикулярно основной оси консольной балки и соединенных полиимидными прослойками, образованными полиимидной пленкой, нагревателя и металлизации нагревателя, при этом полиимидная пленка выполнена из слоя полипиромеллитимида, прилегающего к гибким параллельным трапециевидным вставкам. Гибкая полиимидная вставка, соединяющая основную и дополнительную деформируемые зоны, представляет собой шарнир, имеющий в сечении прямоугольную или трапециевидную форму, с толщиной, не превышающей толщину хвостовика термомеханического актюатора. В состав блоков функциональной нагрузки входят по отдельности, выборочно или совместно: блок беспроводного приема и передачи данных, блок регистрации визуальной информации, а также блок управления перемещением подвижных термомеханических актюаторов с обратной связью. Полиимидные прослойки, образованные полиимидной пленкой между гибкими параллельными трапециевидными вставками, выполнены в V-образной или трапециевидной форме в поперечном сечении с расстоянием между соседними гибкими параллельными трапециевидными вставками, равным или отличным от нуля. Каждый термомеханический актюатор имеет количество каналов управления равное 3, 2 из которых отвечают за движение термомеханических актюаторов меньшего размера, каждая «нога» имеет количество каналов управления равное 6, алгоритм управления которыми задается попеременным включением каждого из каналов в определенной последовательности. Термомеханические актюаторы выполнены с возможностью углового перемещения на угол не менее 30 градусов. Дополнительно и перпендикулярно имеющейся группе
термомеханических актюаторов располагается дублирующая их группа термомеханических актюаторов, организующая перемещение несущей платформы с располагаемыми на ней блоками функциональной нагрузки в перпендикулярном направлении, при этом в соприкосновении с поверхностью могут находиться только термомеханические актюаторы одной из групп. Дополнительно включены датчики обратной связи.
Краткое описание чертежей
Признаки и сущность заявленной группы изобретений поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
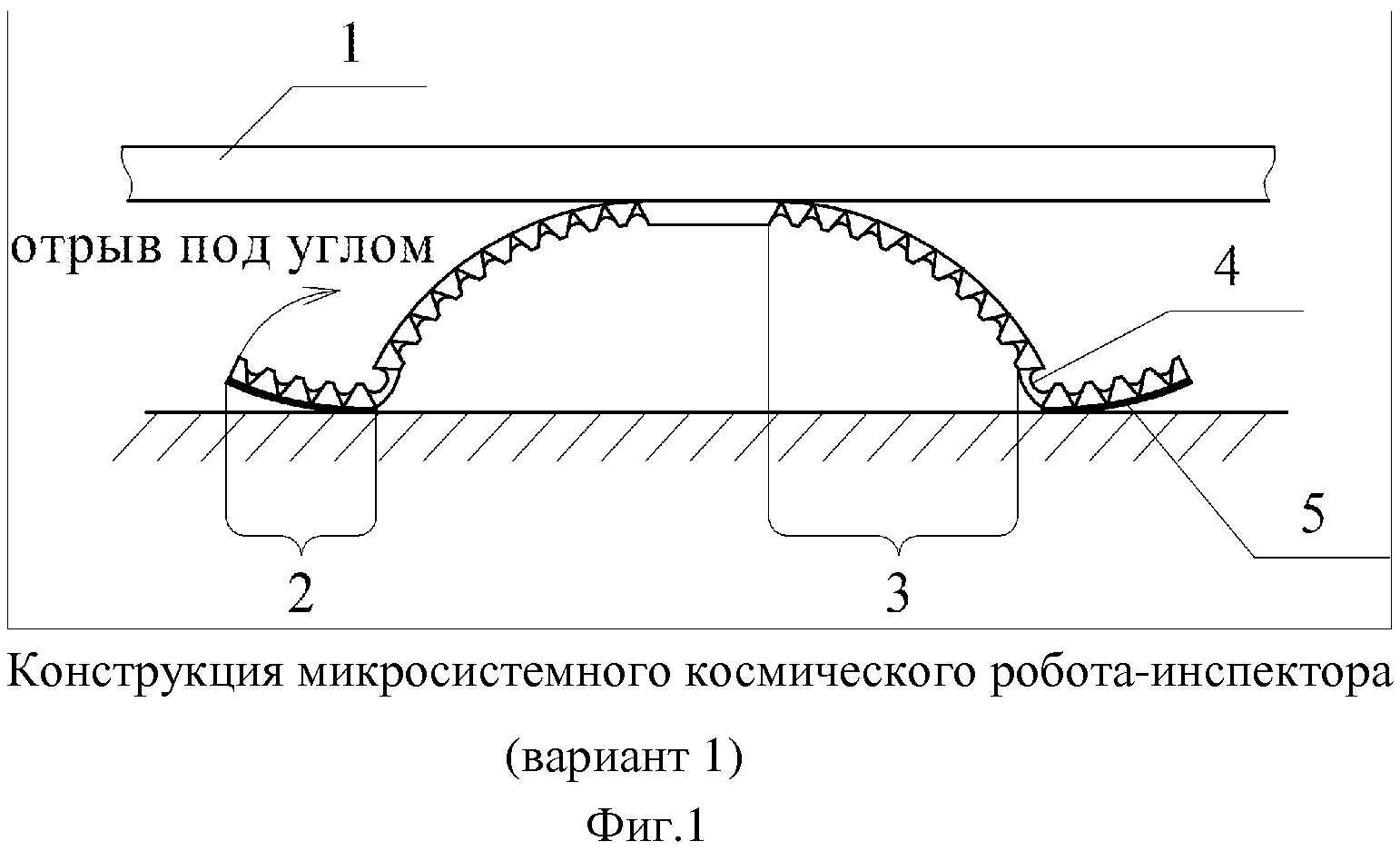
На фиг.1 представлен первый вариант конструкции заявленного микросистемного космического робота-инспектора.
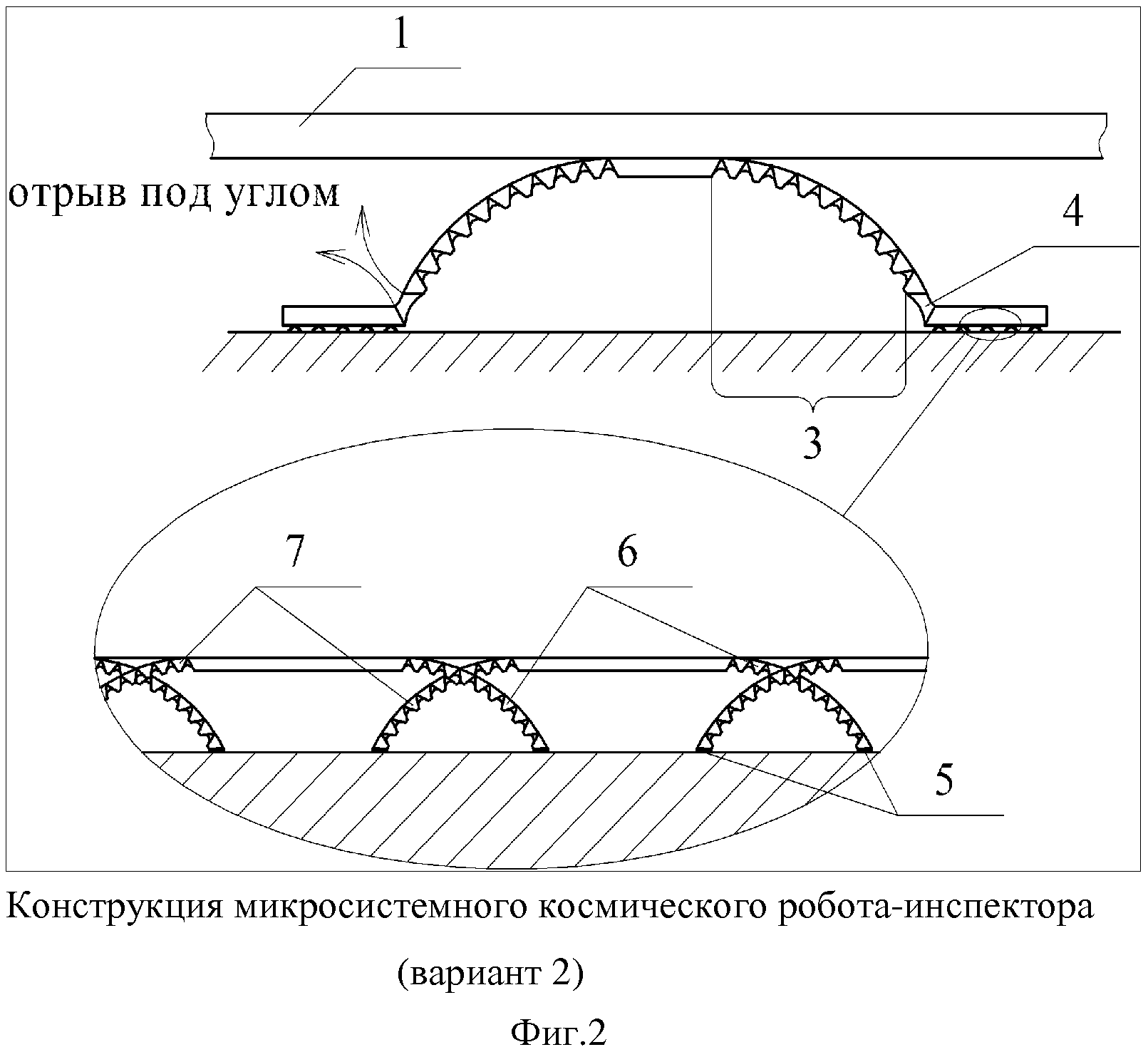
На фиг.2 представлен второй вариант конструкции заявленного микросистемного космического робота-инспектора.
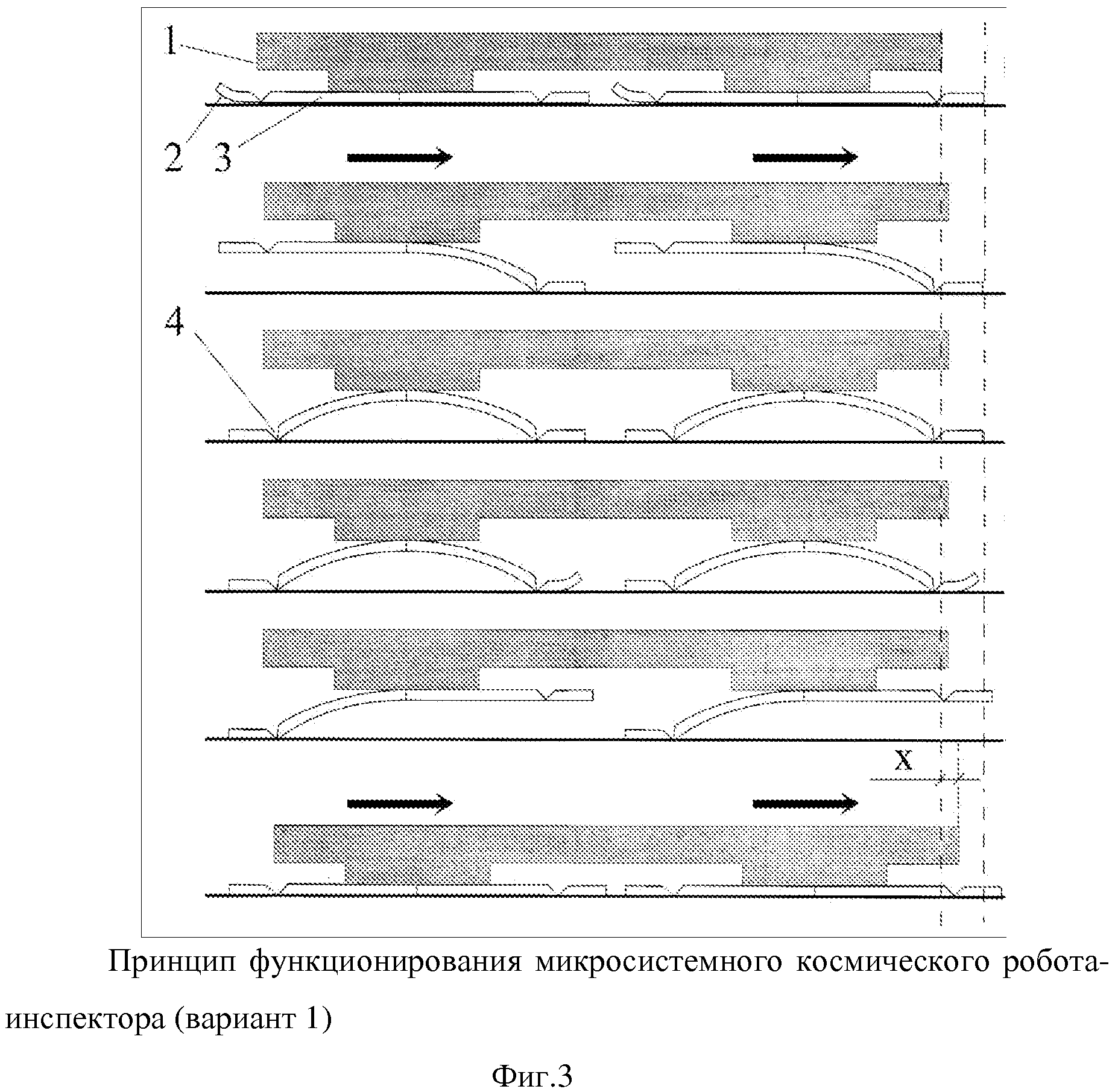
На фиг.3 представлен принцип функционирования первого варианта заявленного микросистемного космического робота-инспектора, иллюстрирующий способность перемещения микросистемного космического робота-инспектора в двух плоскостях и двух направлениях каждой из плоскостей.
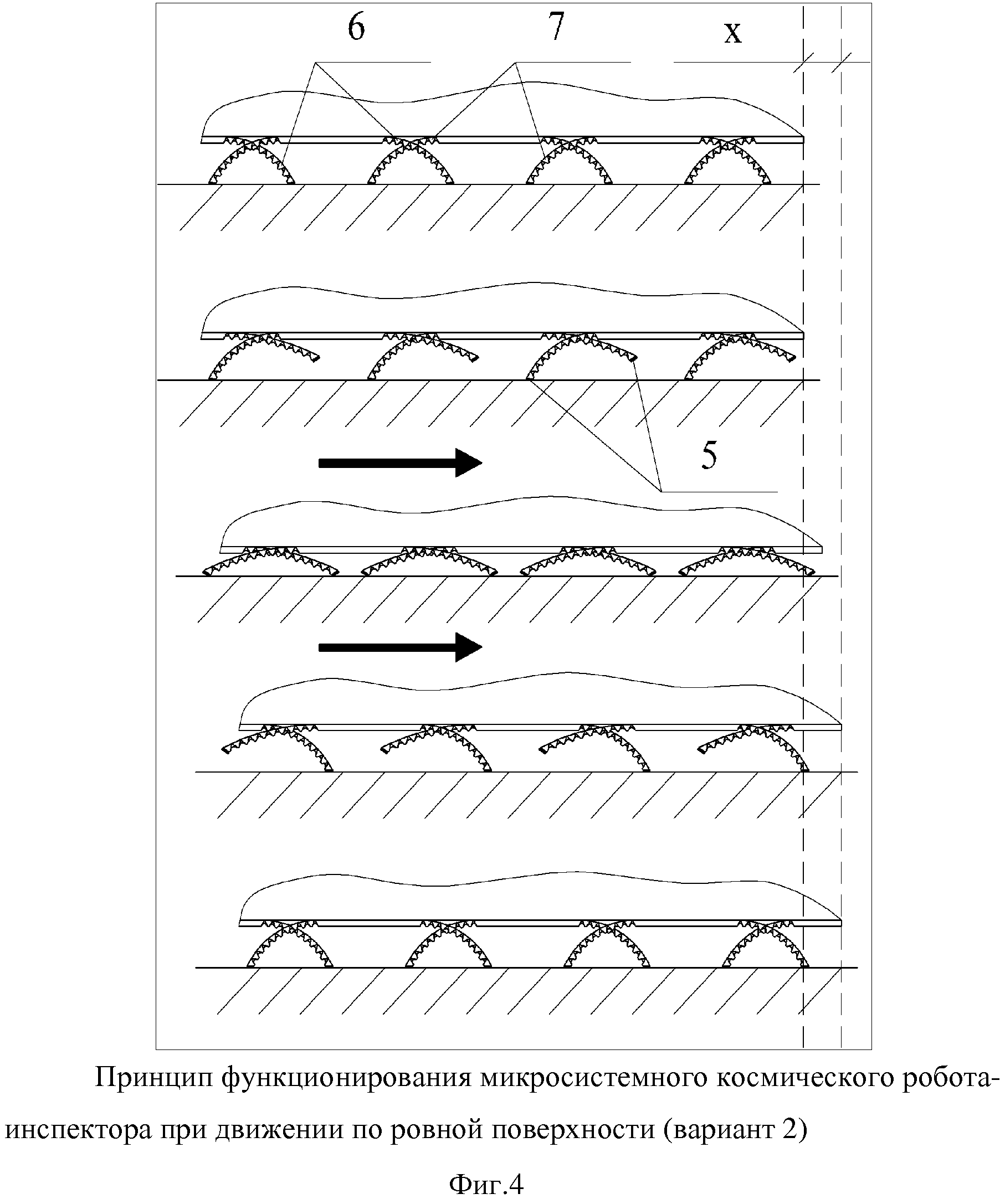
На фиг.4 представлен принцип функционирования второго варианта заявленного микросистемного космического робота-инспектора, иллюстрирующий способность микроперемещения робота в двух плоскостях и двух направлениях каждой из плоскостей при движении по ровной поверхности.
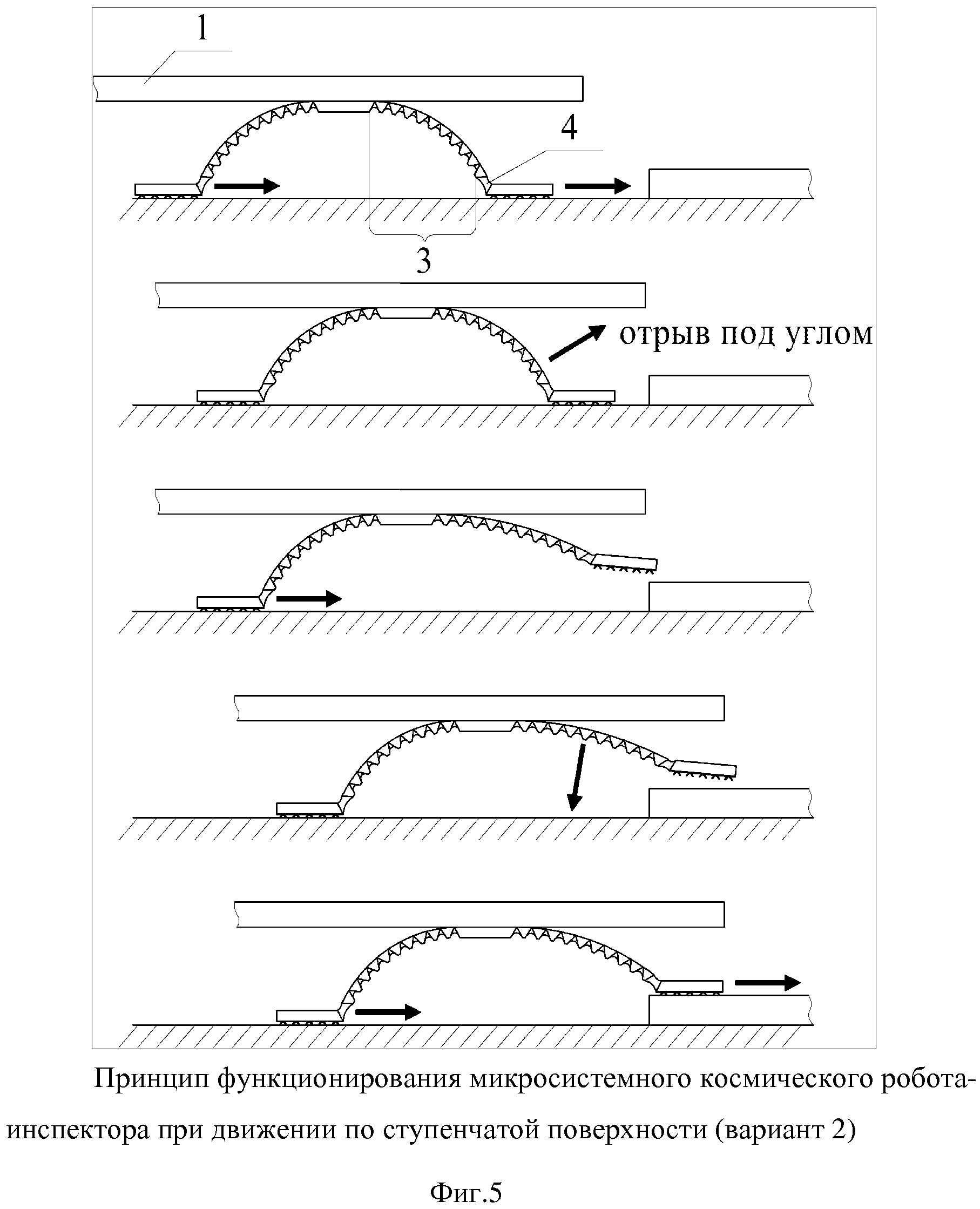
На фиг.5 представлен принцип функционирования второго варианта заявленного микросистемного космического робота-инспектора, иллюстрирующий способность перемещения микросистемного космического
робота-инспектора в двух плоскостях и двух направлениях каждой из плоскостей при движении по сильно шероховатой и ступенчатой поверхности.
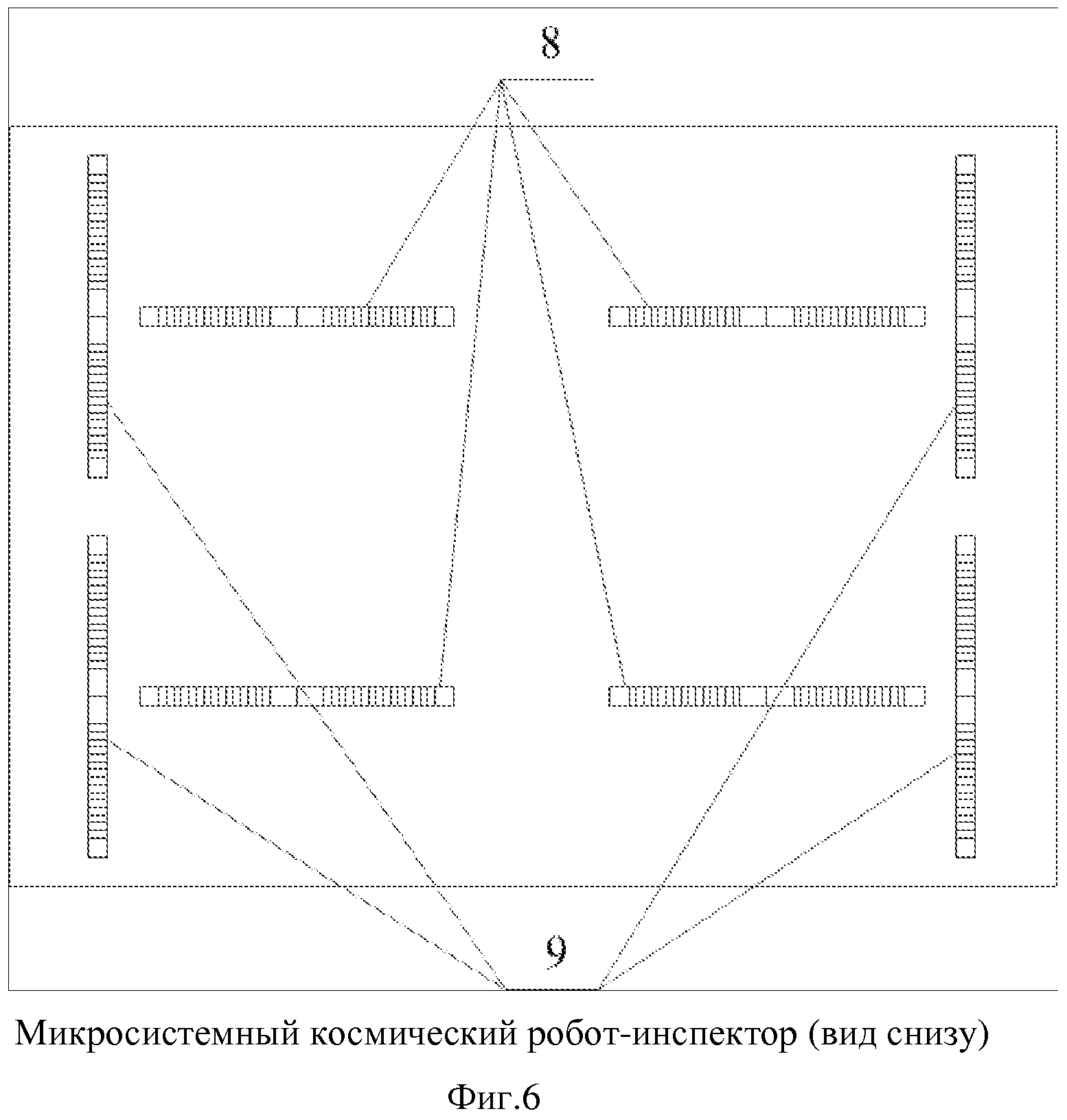
На фиг.6 представлен вид снизу микросистемного космического робота-инспектора, наглядно показывающий расположение основной и расположенной перпендикулярно к ней дублирующей групп термомеханических актюаторов для организации перемещения робота в четырех направлениях.
На фигурах 1 - 6 обозначено следующее:
1 - несущая платформа с располагаемыми на ней блоками функциональной нагрузки (не показаны);
2 - дополнительная деформируемая зона термомеханического актюатора, обеспечивающая прижим/отжим ноги микросистемного космического робота-инспектора к/от поверхности (первый вариант конструкции по фиг.1);
3 - основная деформируемая зона термомеханического актюатора, обеспечивающая основное перемещение микросистемного космического робота-инспектора;
4 - гибкая полиимидная вставка, соединяющая основную и дополнительную деформируемые зоны термомеханического актюатора;
5 - адгезионный слой на балке термомеханического актюатора;
6 - термомеханические актюаторы меньшего размера первого канала управления, обеспечивающие микроперемеремещение микросистемного космического робота-инспектора (второй вариант конструкции по фиг.2);
7 - термомеханические актюаторы меньшего размера второго канала управления, обеспечивающие микроперемеремещение микросистемного космического робота-инспектора (второй вариант конструкции по фиг.2);
8 - основная группа термомеханических актюаторов;
9 - дублирующая группа термомеханических актюаторов.
Осуществление и примеры реализации изобретения
Заявленное изобретение способно нормально функционировать в условиях дестабилизирующих факторов космического пространства и обеспечивать инспектирование оборудования, находящегося в труднодоступных областях космических аппаратов.
Работоспособность микросистемного космического робота-инспектора подтверждают изготовленные образцы некоторых отдельных его элементов, в частности термомеханических актюаторов, обеспечивающих управляемое перемещение в диапазоне не менее 30 угловых градусов и усилие не менее 0,3 мН для термомеханического актюатора площадью 36 мм2. Термомеханические актюаторы могут служить основными элементами конструкции микросистемного космического робота-инспектора. Подтверждением работоспособности являются также результаты проведенного моделирования, в ходе которого установлено значение работы, перемещения и время, требуемое на один цикл шага робота-инспектора по первому конструктивному варианту (см. фиг. 1). За один цикл микросистемный космический робот-инспектор способен пройти расстояние не менее 0,002 м, затратив при этом энергию, значением около 71 Дж. При этом скорость перемещения микросистемного космического робота-инспектора лежит в диапазоне до 10 мм/мин. Конструкция, а также принципы функционирование микросистемного космического робота-инспектора отражены на фигурах 1-6.
На фиг.1 показаны основные конструктивные элементы первого варианта микросистемного космического робота-инспектора.
Основная функциональная нагрузка (не показана) микросистемного космического робота-инспектора расположена на несущей платформе (1), с нижней стороны которой в свою очередь закреплены подвижные исполнительные элементы - термомеханические актюаторы с двумя деформируемыми зонами: основной (3) и дополнительной (2) соответственно.
Термомеханические актюаторы расположены попарно под углом 180 градусов друг к другу. Каждая пара термомеханических актюаторов образует подвижную «ногу» микросистемного космического робота-инспектора. Термомеханические актюаторы расположены как минимум в двух параллельных рядах, образующих как минимум две подвижные «ноги» в каждом из рядов.
В первом варианте конструкции термомеханический актюатор поделен на две деформируемые зоны: основную (3) и дополнительную (2) соответственно, при этом канавки термомеханического актюатора в каждой из этих зон обращены в противоположные стороны, что обеспечивает разнонаправленный изгиб всего термомеханического актюатора в целом. Благодаря дополнительной деформируемой зоне (2) происходит прижим/отжим «ноги» микросистемного космического робота-инспектора от поверхности под углом, что уменьшает требования к необходимым усилиям отрыва. Таким образом, дополнительная деформируемая зона (2) образует «ступню» микросистемного космического робота-инспектора. Данное решение необходимо в связи с использованием адгезионного слоя (покрытия) (5) на «ногах» микросистемного космического робота-инспектора, которое обеспечивает возможность его перемещения по разнородным поверхностям в различных плоскостях, в том числе и в условиях невесомости. Основная деформируемая зона (3) позволяет микросистемному космическому роботу-инспектору перемещаться как минимум в двух плоскостях по два противоположных направления в каждой из них, в зависимости от алгоритма работы. Две деформируемые зоны: основная (3) и дополнительная (2) соответственно каждого из термомеханических актюаторов соединены между собой гибкой полиимидной вставкой (4), обеспечивающей изгиб «ноги» микросистемного космического робота-инспектора. Данное гибкое сочленение позволяет уменьшить взаимообратное влияние усилий двух деформируемых зон: дополнительной (2) и основной (3)
соответственно друг на друга при движении микросистемного космического робота-инспектора, тем самым увеличивая эффективность работы в целом.
На фиг.2 представлена конструкция второго варианта микросистемного космического робота-инспектора. Основное отличие от первого варианта заключается в конструктивных особенностях дополнительной деформируемой зоны термомеханического актюатора (2). Эта деформируемая зона выполнена в виде кремниевой балки, на которой сформирован массив из термомеханических актюаторов меньшего размера первого канала управления (6) и второго канала управления (7) соответственно, расположенных в параллельных рядах и обращенных хвостовиками вниз, при этом на каждом из хвостовиков термомеханических актюаторов меньшего размера нанесен адгезионный слой (5). Соседние термомеханические актюаторы повернуты друг к другу под углом 180 градусов.
Фиг.3 отражает принцип работы микросистемного космического робота-инспектора в первом конструктивном варианте исполнения. Основное перемещение микросистемного космического робота-инспектора осуществляется в плоскости несущей платформы (1) благодаря основной деформируемой зоне (3). Полный цикл одного «шага» микросистемного космического робота-инспектора можно разбить на 6 этапов. Повторяя данный цикл в прямом или обратном направлении организуется движение микросистемного космического робота-инспектора как минимум в двух противоположных направлениях. Также, при необходимости, можно использовать перемещение в ограниченном диапазоне в перпендикулярной несущей платформе (1) плоскости.
На фиг.4 изображен принцип работы микросистемного космического робота-инспектора по второму конструктивному варианту исполнения при перемещении по ровной поверхности. В данном варианте один цикл движения состоит из 4 этапов. Повторяя данный цикл в прямом или обратном направлении организуется движение микросистемного космического робота-
инспектора как минимум в двух противоположных направлениях. В данном случае для перемещения задействована только дополнительная деформируемая зона (2), включающая термомеханические актюаторы меньшего размера (6) и (7) первого и второго каналов управления соответственно.
Основная деформируемая зона (3) необходима при перемещении микросистемного космического робота-инспектора при движении по ступенчатой и неровной поверхности. Последовательность действий при перемещении в таком режиме показана на фиг.5. В данном случае для перемещения задействованы обе деформируемые зоны: дополнительная (2) и основная (3) соответственно.
Как в первом, так и во втором конструктивном варианте при дублировании подвижных «ног» микросистемного космического робота-инспектора и расположении их под прямым углом к имеющимся (как показано на фиг.6, поз.8 и 9) возможно увеличить количество степеней свободы при перемещении в плоскости несущей платформы (1) в два раза, обеспечив перемещение как вперед/назад, так и влево/вправо.
В качестве блоков функциональной нагрузки, расположенных на несущей платформе, могут рассматриваться как по отдельности, так и выборочно или совместно следующие устройства: блок беспроводного приема и передачи данных, блок регистрации визуальной информации, а также блок управления перемещением подвижных термомеханических актюаторов с обратной связью. Источник питания микросистемного космического робота-инспектора располагается либо на несущей платформе в случае автономного использования, либо отдельно от нее в случае управления микросистемным космическим роботом-инспектором посредством проводного соединения. Также микросистемный космический робот-инспектор может включать датчики обратной связи, обеспечивающие корректное его перемещение в ограниченном пространстве при работе в автономном режиме, а также
своевременную реакцию на изменение внешних дестабилизирующих факторов, влияющих на его функционирование.
Таким образом, заявленное изобретение обеспечивает создание малогабаритного (микросистемного) космического робота-инспектора, обеспечивающего управляемое перемещение не менее чем в двух направлениях, возможность переноса полезной нагрузки и функционирования в условиях космического пространства с применением изготовленных по групповому методу, стандартными технологиями микрообработки кремния, высоконадежных исполнительных элементов в виде подвижных термомеханических актюаторов.
Источники информации
1. Erdem E.Y., Chen Y.M., Mohebbi M., Darling R.B., Böhringer K.F., Suh J.W., Kovacs G.T.A. Thermally Actuated Omnidirectional Walking Microrobot. Journal of Microelectromechanical Systems, 2010; 19 (3). С. 433-442. - [Л1].
2. Ebefors T., Mattsson J.U., Kälvesten E., Stemme G. A walking silicon micro-robot //«The 10th Int Conference on Solid-State Sensors and Actuators» (Transducers'99). - Сендай, Япония. 1999. С. 1202-1205. - [Л2].
3. Заявка США на изобретение US2012/0168233. Robotic devices and methods / J. V. Clark (US); Purdue research foundation (US). - Опубл. 05.07.2012. - 8 с. - [Л3].
4. Заявка США на изобретение US2010/0145511. Microcrawler and conveyor robots, controllers, systems, and methods / D. O. Popa (US), R. Murthy (US), A. N. Das (US); Fulbright & Jaworski L.L.P. (US). - Опубл. 10.06.2010. - 17 с. - [Л4].
Система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы
Способ изготовления метаматериала (варианты)
Микромеханическая система
Способ автоматизированной калибровки следящих антенных систем
Способ одновременного определения шести параметров движения космического аппарата при проведении траекторных измерений и система для его реализации
Электронный датчик тока и напряжения на высоком потенциале
Солнечная батарея для малоразмерных космических аппаратов и способ ее изготовления
Активный ультрафиолетовый солнечный датчик для системы ориентации малоразмерного космического аппарата
Способ радиотехнических доплеровских угломерных измерений космического аппарата и система для осуществления данного способа
Способ радиоприема высокоскоростной информации космической радиолинии и устройство для его реализации
Система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы
Способ изготовления метаматериала (варианты)
Микромеханическая система
Способ автоматизированной калибровки следящих антенных систем
Способ одновременного определения шести параметров движения космического аппарата при проведении траекторных измерений и система для его реализации
Электронный датчик тока и напряжения на высоком потенциале
Солнечная батарея для малоразмерных космических аппаратов и способ ее изготовления
Активный ультрафиолетовый солнечный датчик для системы ориентации малоразмерного космического аппарата
Способ радиотехнических доплеровских угломерных измерений космического аппарата и система для осуществления данного способа
Способ радиоприема высокоскоростной информации космической радиолинии и устройство для его реализации

