Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к технике цифровых систем управления ориентацией космических аппаратов (КА).
Известны способы управления ориентацией КА, включающие периодическое измерение параметров углового движения КА, расчет длительностей включения исполнительных органов пропорциональных текущему отклонению измеренных параметров от заданных, включение исполнительных органов при значениях расчетных длительностей больших минимальной длительности обеспечиваемой исполнительными органами.
Известные способы реализуются устройствами, включающими вычислительное устройство (ВУ), измерители угловой скорости (ИУС), датчики внешней информации и исполнительные органы [1, 2].
Недостатками указанных способов, реализованных известными устройствами, являются большая погрешность стабилизации КА по углу и угловой скорости, вызванная относительно (относительно непрерывных систем) большим периодом смены управления (стабилизации) из-за ограниченного быстродействия (производительности) вычислительного устройства (ВУ), большой величиной минимальных управляющих моментов исполнительных органов и большим расходом рабочего тела для обеспечения минимальной скорости на цикле стабилизации.
Известен также способ управления ориентацией КА, включающий периодическое измерение параметров углового движения КА, формирование и выдачу на исполнительные органы управляющих сигналов пропорциональных текущему отклонению измеренных параметров от заданных на моменты времени начала периодов формирования управления и длительностью равной длительности периода стабилизации.
Этот способ реализуется устройством, включающим измерители угловой скорости (ИУС), датчики внешней информации, исполнительные органы и ВУ, содержащее блок определения ориентации и блок обеспечения стабилизации [3] (прототип).
Недостатками такого способа, реализованного известным устройством, являются большая погрешность стабилизации КА, вызванная относительно (относительно непрерывных систем) большим периодом смены управления (стабилизации) из-за ограниченного быстродействия (производительности) ВУ и конечной величины минимальных управляющих моментов исполнительных органов, не позволяющих обеспечить непрерывное управление ориентацией (непрерывное изменение управляющего момента); большим энергопотреблением, вызванным уменьшением периода стабилизации для приближения дискретного процесса к непрерывному.
При стабилизации КА в заданном программном положении управление угловым движением производится, например, с использованием закона управления:

где
Кφ и Кω - постоянные коэффициенты,
 - угловое ускорение КА;
- угловое ускорение КА;
Δφ=φпр-φ - отклонение текущего (измеренного) углового положения КА от программного;
 - отклонение текущей (измеренной) угловой скорости вращения КА от программной.
- отклонение текущей (измеренной) угловой скорости вращения КА от программной.
При таком законе управления уравнение вращения КА будет иметь вид: 
а его решение:


где

C1 и С2 - постоянные величины, определяемые начальным угловым положением и начальной угловой скоростью КА и равные:


Δφн - отклонение текущего(измеренного) углового положения КА от программного на момент начала периода стабилизации,
 - отклонение текущей (измеренной) угловой скорости вращения КА от программной на момент начала периода стабилизации.
- отклонение текущей (измеренной) угловой скорости вращения КА от программной на момент начала периода стабилизации.
При отрицательных значениях К1 и К2 система управления вращением КА будет устойчивой и величины Δφ и Δω при любых их начальных значениях будут непрерывно (для непрерывных систем управления) уменьшаться. При этом вместе с непрерывным уменьшением Δφ и Δω должно непрерывно уменьшаться и создаваемое исполнительными органами угловое ускорение вращения КА.
При периодическом управлении угловым движением КА в соответствии с (1) с периодом управления т, угловое ускорение вращения КА в течение всего периода управления будет постоянной величиной, пропорциональной отклонению измеренных параметров углового движения КА от программных на момент начала периода. Так как угловые ускорения вращения КА при периодическом формировании управления рассчитываются на начало периода стабилизации т и не уменьшаются до его окончания, то и приращение (уменьшение) за период стабилизации рассогласований между текущими (измеренными) и программными значениями параметров углового движения всегда будет больше, чем при непрерывном формировании управления. Это приводит к тому, что при малых рассогласованиях между текущими и программными значениями параметров углового движения КА (ошибках стабилизации), т.е. значениях, которые могут быть скомпенсированы за интервал времени, меньший периода стабилизации т, ошибки стабилизации на момент окончания периода стабилизации не могут быть уменьшены до нулевых значений даже при отсутствии ошибок измерения параметров углового движения и формирования исполнительными органами (ИО) управляющих ускорений. В результате установятся угловые колебания КА с амплитудой, зависящей от параметров углового движения КА на начало каждого периода стабилизации, длительности периода стабилизации и дискретности реализации угловых ускорений исполнительными органами КА. Для уменьшения ошибок стабилизации КА при периодическом формировании управления и приближения процесса изменения параметров его углового движения к процессу их изменения при непрерывном формировании управления уменьшают период стабилизации т, дискретность реализуемого ИО углового ускорения, используют более точные измерители параметров углового движения КА. Уменьшение периода стабилизации т приводит к необходимости использования для решения задачи расчета и реализации управляющего ускорения вращения КА более быстродействующих, а следовательно, и более дорогих и с большим энергопотреблением и весом интерфейса и вычислительного устройства.
Уменьшение величины минимального углового ускорения, создаваемого инерционными исполнительными органами, приводит к необходимости доработки или разработки новых более дорогих и энергоемких исполнительных органов.
Уменьшение периода стабилизации т приводит также к увеличению погрешностей измерения углового положения и угловой скорости КА из-за уменьшения интервала оценки этих параметров.
Таким образом, недостатками известного способа, реализованного известным устройством, являются большие погрешность ориентации и стабилизации КА и ошибки оценки параметров углового движения КА.
Задачей настоящего изобретения является повышение точности ориентации и стабилизации КА.
Поставленная задача решается тем, что в способе ориентации космических аппаратов, включающем периодическое измерение параметров углового движения КА, формирование и выдачу на исполнительные органы управляющих сигналов, производят увеличение периода расчета и смены управляющих сигналов на исполнительные органы до величин, обеспечивающих уменьшение загрузки вычислительного устройства и повышение точности оценки параметров углового движения, расчет параметров углового движения КА на момент окончания текущего периода для вращения КА с непрерывным формированием управления, расчет величин и длительностей действия угловых ускорений, обеспечивающих приведение параметров углового движения КА при периодическом формировании управления к их значениям на момент окончания текущего периода для вращения КА с непрерывным формированием управления, реализацию исполнительными органами величин и длительности действия рассчитанных угловых ускорений, определение моментов времени уменьшения параметров углового движения до величин, не превышающих шумовых составляющих ошибок измерения параметров углового движения, и уменьшение длительностей действия последующих формируемых угловых ускорений, например, путем их умножения на коэффициент демпфирования К меньший единицы.
Этот способ реализуется устройством, представляющим собой систему управления, включающим измерители угловой скорости, датчики внешней информации, своими выходами подключенные к блоку определения ориентации, включенному в вычислительное устройство, исполнительные органы, при этом в устройство введены блок реализации длительностей включения, блок задания коэффициентов демпфирования и блок реализации угловых ускорений, при этом блок определения ориентации своими выходами соответственно подключен к входу блока реализации длительности включения и входу блока задания коэффициентов демпфирования, выходы которых через блок реализации угловых ускорений подключены к исполнительным органам.
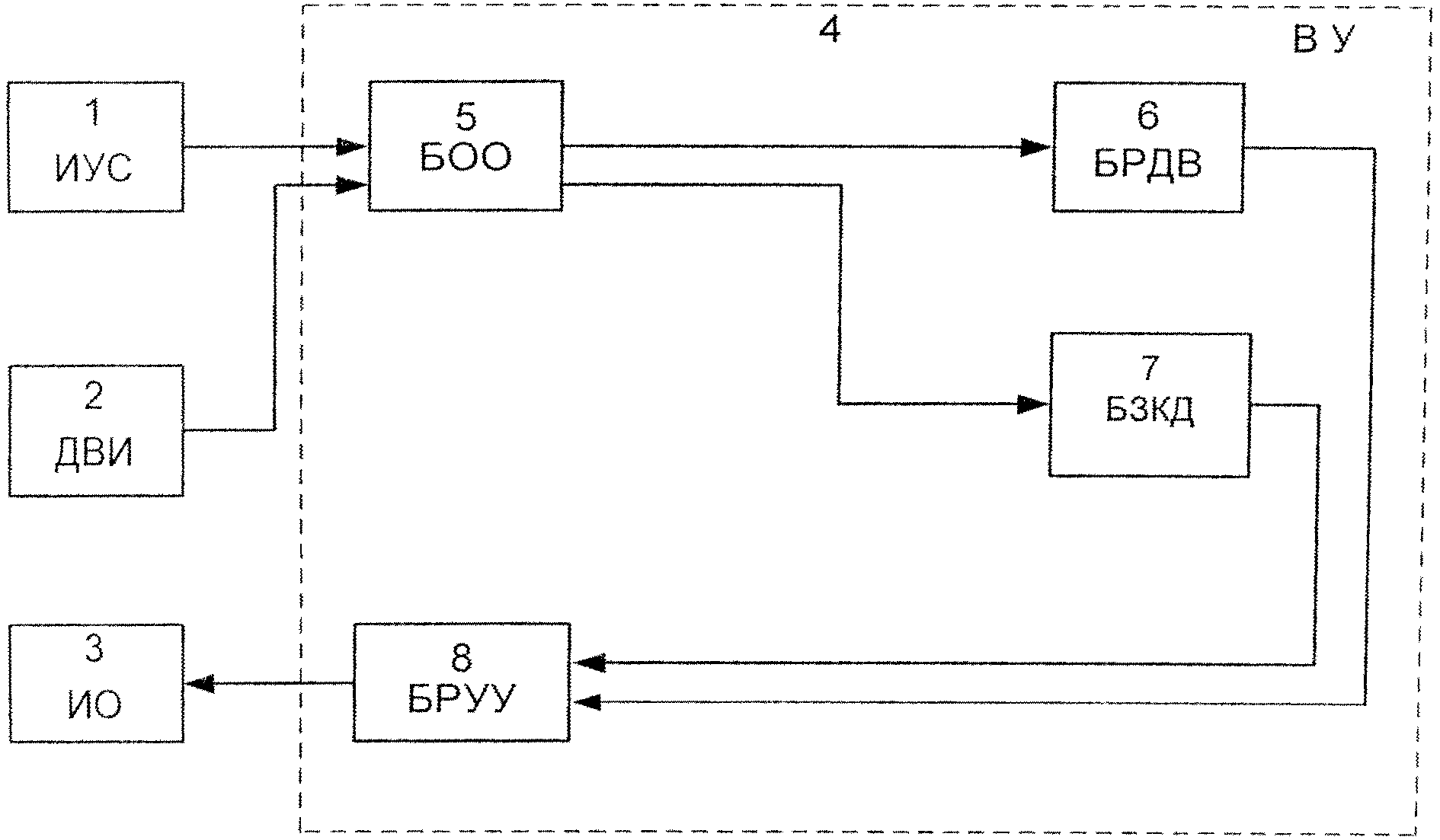
На чертеже приведена функциональная блок-схема устройства для осуществления способа.
Устройство включает измерители угловой скорости (1), датчики внешней информации (2), исполнительные органы (3), вычислительное устройство (4), содержащее блок определения ориентации (5), блок расчета длительностей включения (6) исполнительных органов, входом подключенный к первому выходу блока определения ориентации (5), блок задания коэффициентов демпфирования (7) и блок реализации угловых ускорений (8), выходом соединенный с входом исполнительных органов (3), первым входом с выходом блока расчета длительностей включения исполнительных органов (6), вторым входом с выходом блока задания коэффициентов демпфирования (7), вход которого присоединен ко второму выходу блока определения ориентации (5).
Устройство работает следующим образом. При первоначальном включении, например, по контакту отделения КА от последней ступени ракеты-носителя включается вычислительное устройство (ВУ (4)), измерители угловой скорости (1), датчик внешней информации (2), исполнительные органы (3). В блоке определения ориентации (5) по информации с измерителей угловой скорости (1) и датчика внешней информации (2) с выбранной при проектировании дискретностью (определяется быстродействием ВУ (4) и объемом решаемых задач) определяются параметры ориентации (проекции угловой скорости и угловое положение) в заданной системе координат известным способом.
В блоке расчета длительностей включения исполнительных органов (6) по информации о текущих параметрах углового движения КА из блока определения ориентации (5) и заданных программных параметрах определяются величины реализуемых ИО (3) управляющих моментов и длительности включения ИО следующим образом.
При управлении угловым движением КА относительно каждой из трех осей OX, OY, OZ, например, в соответствии с законом управления

где
Кφ и Кω - постоянные коэффициенты,
 - угловое ускорение КА;
- угловое ускорение КА;
 - отклонение текущего (измеренного) углового положения КА от программного;
- отклонение текущего (измеренного) углового положения КА от программного;
 - отклонение текущей (измеренной) угловой скорости вращения КА от программной;
- отклонение текущей (измеренной) угловой скорости вращения КА от программной;
i=x, y, z,
определяют значения параметров углового движения КА на момент окончания текущего, к-го периода стабилизации, для варианта движения с непрерывным управлением.
Параметры углового движения КА на момент окончания текущего к-го периода стабилизации будут определяться уравнениями (решение уравнений (7)):


где
C1 и С2 - постоянные величины, определяемые начальным угловым положением и начальной угловой скоростью КА (параметрами углового движения на начало к-го периода стабилизации тк) и равные:


где
Δφнi - отклонение текущего (измеренного) углового положения КА от программного на момент начала периода стабилизации,
 - отклонение текущей (измеренной) угловой скорости вращения КА от программной на момент начала периода стабилизации,
- отклонение текущей (измеренной) угловой скорости вращения КА от программной на момент начала периода стабилизации,
тк - длительность периода стабилизации.
Уравнение (7) по параметрам ориентации на момент начала периода стабилизации определяет также на момент начала периода стабилизации угловое ускорение по каждой из осей, которое необходимо создавать ИО КА на начало текущего периода при непрерывном управлении угловым движением КА, равное:

После определения на момент начала к-го периода стабилизации угловых ускорений по каждой из осей, которые необходимо создавать ИО (3) при непрерывном управлении угловым движением КА из состава реализуемых, установленными на КА ИО, угловых ускорений выбираются, например, большие угловые ускорения по каждой из осей, но ближайшие к рассчитанным. По выбранным реализуемым ИО (3) угловым ускорениям определяются для каждой из осей длительности включения ИО (3) для варианта периодического формирования управления, например, следующим образом.
Угловое положение КА относительно каждой из осей на к-м периоде стабилизации с момента получения информации при выключенных ИО может быть определено уравнением:

где
Δφki(tн) - отклонение текущего углового положения от заданного на момент начала к-го периода стабилизации;
 - отклонение текущей угловой скорости КА от заданной на момент начала к-го периода стабилизации;
- отклонение текущей угловой скорости КА от заданной на момент начала к-го периода стабилизации;
Δрт - интервал времени (часть периода стабилизации) от момента начала периода стабилизации до момента включения ИО.
Угловое положение КА и его угловая скорость относительно каждой из осей на к-го, периоде стабилизации с момента включения ИО могут быть определены уравнениями:

Для приведения параметров углового движения КА на момент окончания к-го периода стабилизации при периодическом управлении угловым движением к значениям, полученным для варианта с непрерывным формированием управления, в общем случае необходимо двукратное включение ИО с длительностями включения Δт1 и Δт2. То есть период стабилизации будет включать: участок движения с постоянной угловой скоростью (двигатели стабилизации выключены) Δрт от момента начала к-го периода стабилизации до момента первого включения ИО, участок движения с выбранным угловым ускорением длительностью Δт1, участок движения, например, с угловым ускорением, равным выбранному, но противоположным по знаку, длительностью Δт2 и участка движения с постоянной угловой скоростью после выключения ИО до момента окончания периода стабилизации длительностью, равной

Δрт - длительность движения с постоянной угловой скоростью - известная величина, которая определяется на этапе проектирования и зависит от затрат времени на съем информации, проведение расчетов для определения угловых ускорений и временем, необходимым ОИ на реализацию требуемого углового ускорения.
Для расчета длительностей включения ИО (3) Δт1 и Δт2 определим величины углового положения и угловой скорости на момент окончания периода стабилизации для варианта периодического формирования управления угловым движением КА и приравняем их величинам углового положения и угловой скорости, полученным для варианта с непрерывным формированием управления. Получим два уравнения с двумя неизвестными величинами Δт1 и Δт2:



Из уравнений (10) определяются величины Δт1 и Δт2 по формулам:


Таким образом, включая ИО (3) два раза на увеличенном с целью уменьшения загрузки ВУ и обеспечения управления угловым движением КА ИО с минимальным набором реализуемых ИО (3) управляющих угловых ускорений, периоде стабилизации при периодическом управлении угловым движением можно обеспечить на момент окончания периода стабилизации значения параметров углового движения КА (угловое положение и угловую скорость) такие же, какие они были бы при непрерывном управлении с непрерывно уменьшающимися угловым ускорением, угловой скоростью и угловым положением.
При значениях параметров углового движения, превышающих случайные (шумовые) составляющие ошибок измерения угловой скорости и углового положения, в блоке задания коэффициентов демпфирования (7) коэффициенту демпфирования К присваивается значение, равное единице. При уменьшении параметров углового движения до значений, не превышающих случайные (шумовые) составляющие ошибок измерения угловой скорости и углового положения, в блоке задания коэффициентов демпфирования (7) коэффициенту демпфирования К присваивается значение, меньшее единицы. Значение К, меньшее единицы, выбирается при проектировании в зависимости от величин случайных составляющих ошибок измерения параметров углового движения и допустимых величин ошибок стабилизации КА, например, как частное от деления допустимых значений ошибок стабилизации на максимальные значения ошибок измерения угловой скорости. В блоке реализации угловых ускорений (8) для уменьшения реакции системы на входной (в основном шумовой) сигнал производится уменьшение длительности включения ИО путем умножения на выбранный в блоке (7) коэффициент демпфирования К, меньший единицы.
Уменьшая длительности включения ИО (3) в зоне демпфирования, при уменьшении величин измеряемых угловых скоростей и углового положения до уровня шумовых составляющих ошибок измерения, т.е. реакцию системы на входной сигнал, обеспечивается дополнительное уменьшение (сглаживание) ошибок стабилизации КА, вызванное случайными (шумовыми) составляющими ошибок измерения параметров углового движения.
Литература
[1] Модернизация системы управления движением космических аппаратов «Фотон», «Бион», Ю.Г. Антонов, А.А. Головченко, С.Н. Платонов, Б.К. Сучков, Ю.К. Пылаев - X Санкт-Петербургская международная конференция по интегрированным навигационным системам, ГНЦ РФ-ЦНИИ «Электроприбор», 2003 г., стр. 77-82 (аналог).
[2] Патент РФ №2466068, кл. B64G 1/24, 10. 11.2012 г.
[3] Аншаков Г.П., Макаров В.П., Мантуров А.И., Мостовой Я.А., Методы и средства управления в высокоиформативном наблюдении Земли из космоса.
XIV САНКТ-ПЕТЕРБУРГСКАЯ МЕЖДУНАРОДНАЯ КОНФЕРЕНЦИЯ ПО ИНТЕГРИРОВАННЫМ НАВИГАЦИОННЫМ СИСТЕМАМ, 28-30 мая 2007, стр. 165-173, Санкт-Петербург, Россия, 2007 (прототип).
Способ управления процессами подготовки и эксплуатации сложных технических объектов и система для его осуществления
Устройство раскрытия плоских крупногабаритных конструкций космического аппарата
Устройство отделения и раскрытия створок батареи солнечной космического аппарата
Устройство обеспечения теплового режима и чистоты космической головной части ракеты космического назначения с крупногабаритной полезной нагрузкой
Способ автоматизированной обработки и анализа телеметрической информации многопараметрического объекта и система для его осуществления
Поворотная заслонка
Устройство крепления крупногабаритных плоских конструкций на космическом аппарате
Способ сборки космической головной части и устройство для его реализации
Способ полетной калибровки мультиспектральной аппаратуры космического базирования
Регулятор давления
Способ управления процессами подготовки и эксплуатации сложных технических объектов и система для его осуществления
Устройство раскрытия плоских крупногабаритных конструкций космического аппарата
Устройство отделения и раскрытия створок батареи солнечной космического аппарата
Устройство обеспечения теплового режима и чистоты космической головной части ракеты космического назначения с крупногабаритной полезной нагрузкой
Способ автоматизированной обработки и анализа телеметрической информации многопараметрического объекта и система для его осуществления
Поворотная заслонка
Устройство крепления крупногабаритных плоских конструкций на космическом аппарате
Способ сборки космической головной части и устройство для его реализации
Способ полетной калибровки мультиспектральной аппаратуры космического базирования
Регулятор давления

