Результат интеллектуальной деятельности: ЭКЗОСКЕЛЕТ С ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области электропневмоавтоматики и может быть использовано для осуществления ходьбы и реабилитации людей с нарушениями опорно-двигательного аппарата, а также в качестве универсальной транспортной платформы.
Известен экзоскелет с электроприводом (патент США №7857774, A61H 1/00 от 28.12.2010), содержащий опорную раму, две опорные стойки, четыре электродвигателя, установленные в тазобедренных и коленных суставах, аккумуляторные батареи (до пяти штук), а также блок управления с биоэлектрическими датчиками и датчиками усилий, расположенными на задней поверхности бедра и стопах пользователя.
Недостатками данного устройства являются: отсутствие возможности поворота пользователя в экзоскелете вокруг центральной оси и способности плавного перемещения подвижных элементов каркаса экзоскелета без использования демпфирующих устройств, ограниченное количество степеней свободы экзоскелета (8) вследствие установки электромоторов непосредственно в тазобедренных и коленных суставах, длительное время калибровки устройства под конкретного пользователя (до 2 месяцев).
Известен экзоскелет с гидроприводом (заявка США №2013/0102935, A61H 3/06 от 25.04.2013), содержащий две роботизированные нижние конечности, гидроцилиндры, предназначенные для сгибания тазобедренных и коленных суставов, управляющую аппаратуру, насос с электромотором и источник питания. Управление движением осуществляется центральным контроллером, сигналы на который поступают от двух датчиков положения, расположенных в голеностопных звеньях конструкции экзоскелета.
Недостатками данной конструкции являются необходимость пользователя поддерживать равновесие и обеспечивать начальный импульс роботизированным конечностям для осуществления движения, что ограничивает область применения экзоскелета, а также невысокие параметры срока службы (до 5·106 циклов) и времени срабатывания исполнительных устройств (0,06-0,1 с).
Известен экзоскелет (патент РФ №2493805, A61H 3/00 от 20.02.12), содержащий опорные стойки, башмаки и траверсу с шарниром на ее центральной части, в котором вращается вал.
При эксплуатации такого экзоскелета требуется задействовать мышечную систему человека, что не позволяет использовать его людям с параличом одной или нескольких нижних конечностей.
Известен экзоскелет с электроприводом (заявка США №2011/0066088, A61H 1/02 от 17.03.2011), содержащий неподвижный тазовый поддерживающий элемент, две роботизированные нижние конечности, главный и второстепенный тазовые, коленные, голеностопные привода, систему управления, состоящую из акселерометра, инклинометра, датчиков расстояния, давления и движения, клавиатуры и джойстика.
К недостаткам данного устройства можно отнести невысокую скорость передвижения (не более 0,3 м/с), обусловленную ограниченными возможностями возвратно-поступательных электроприводных исполнительных механизмов, наличие рывков при движении.
Наиболее близким по технической сущности и достигаемому эффекту является экзоскелет с пневмоприводом (патент КНР №201870775, A61H 3/00 от 22.06.2011), состоящий из силового каркаса, который включает в себя опорную раму с шарнирами, в которых закреплены опорные стойки, в свою очередь, состоящие из тазобедренных, коленных и голеностопных звеньев, и электропневматической системы, содержащей первый пневмомускул, первый, второй, третий и четвертый двухлинейные и двухпозиционные пневмораспределители, первый трехлинейный двухпозиционный пневмораспределитель, регулятор давления, контроллер и компрессор.
В то же время экзоскелет является стационарным, а приводные двигатели позволяют перемещать конечности устройства лишь в сагиттальной плоскости, что значительно ограничивает его функции.
Задачей, на решение которой направлено заявляемое изобретение, является повышение безопасности и надежности работы роботизированного экзоскелета за счет использования электропневматической элементной базы.
Техническим результатом является улучшение эксплуатационных характеристик, в том числе оптимального распределения нагрузки за счет пропорционального управления, стабильной скорости и плавности хода, обеспеченной применением «мягких» бескаркасных пневмодвигателей.
Поставленная задача решается, а технический результат достигается тем, что экзоскелет, состоящий из силового каркаса, который включает в себя опорную раму с шарнирами, в которых закреплены опорные стойки, в свою очередь, состоящие из тазобедренных, коленных и голеностопных звеньев, и электропневматической системы, содержащей первый пневмомускул, первый, второй, третий и четвертый двухлинейные двухпозиционные пневмораспределители, первый трехлинейный двухпозиционный пневмораспределитель, регулятор давления, контроллер и компрессор, причем первый, второй, третий и четвертый двухлинейные двухпозиционные пневмораспределители и трехлинейный двухпозиционный пневмораспределитель электрически связаны с контроллером, согласно изобретению содержит второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый пневмомускулы, первый и второй неполноповоротные пневмодвигатели, первый, второй, третий, четвертый и пятый пропорциональные пневмораспределители, пятый, шестой, седьмой и восьмой двухлинейные двухпозиционные пневмораспределители, второй и третий трехлинейные двухпозиционные пневмораспределители, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой управляемые обратные клапаны, первый и второй клапаны быстрого выхлопа, первый и второй обратные клапаны, первый и второй дроссели, блок подготовки воздуха, пневмоаккумулятор, электроаккумулятор, систему управления, состоящую из комбинированной микроэлектромеханической системы, включающей акселерометр, инклинометр, гироскоп, датчики давления и угла поворота, при этом первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой пневмомускулы пневматически связаны с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым двухлинейными двухпозиционными пневмораспределителями через первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой управляемые обратные клапаны соответственно, а первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой двухлинейные двухпозиционные пневмораспределители пневматически связаны с первым, вторым, третьим и четвертым пропорциональными пневмораспределителями соответственно, девятый и десятый пневмомускулы пневматически связаны с первым и вторым клапанами быстрого выхлопа через первый и второй дроссели, а также со вторым и третьим трехлинейными пневмораспределителями через первый и второй обратные клапаны, концы пневмомускулов шарнирно соединены с тазобедренными и коленными элементами силового каркаса, первый и второй неполноповоротные пневмодвигатели пневматически соединены с пятым пропорциональным пневмораспределителем, первый, второй, третий, четвертый и пятый пропорциональные пневмораспределители пневматически связаны с первым трехлинейным двухпозиционным пневмораспределителем, второй и третий трехлинейные двухпозиционные пневмораспределители пневматически связаны с регулятором давления, который, в свою очередь, пневматически связан с первым трехлинейным двухпозиционным пневмораспределителем, а первый трехлинейный двухпозиционный пневмораспределитель пневматически связан через блок подготовки воздуха с пневмоаккумулятором и компрессором, шесть датчиков давления и шесть датчиков угла поворота электрически связаны с контроллером, который, в свою очередь, электрически связан с первым, вторым, третьим, четвертым и пятым пропорциональными пневмораспределителями, первым, вторым и третьим трехлинейными двухпозиционными пневмораспределителями, первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым двухлинейными двухпозиционными распределителями.
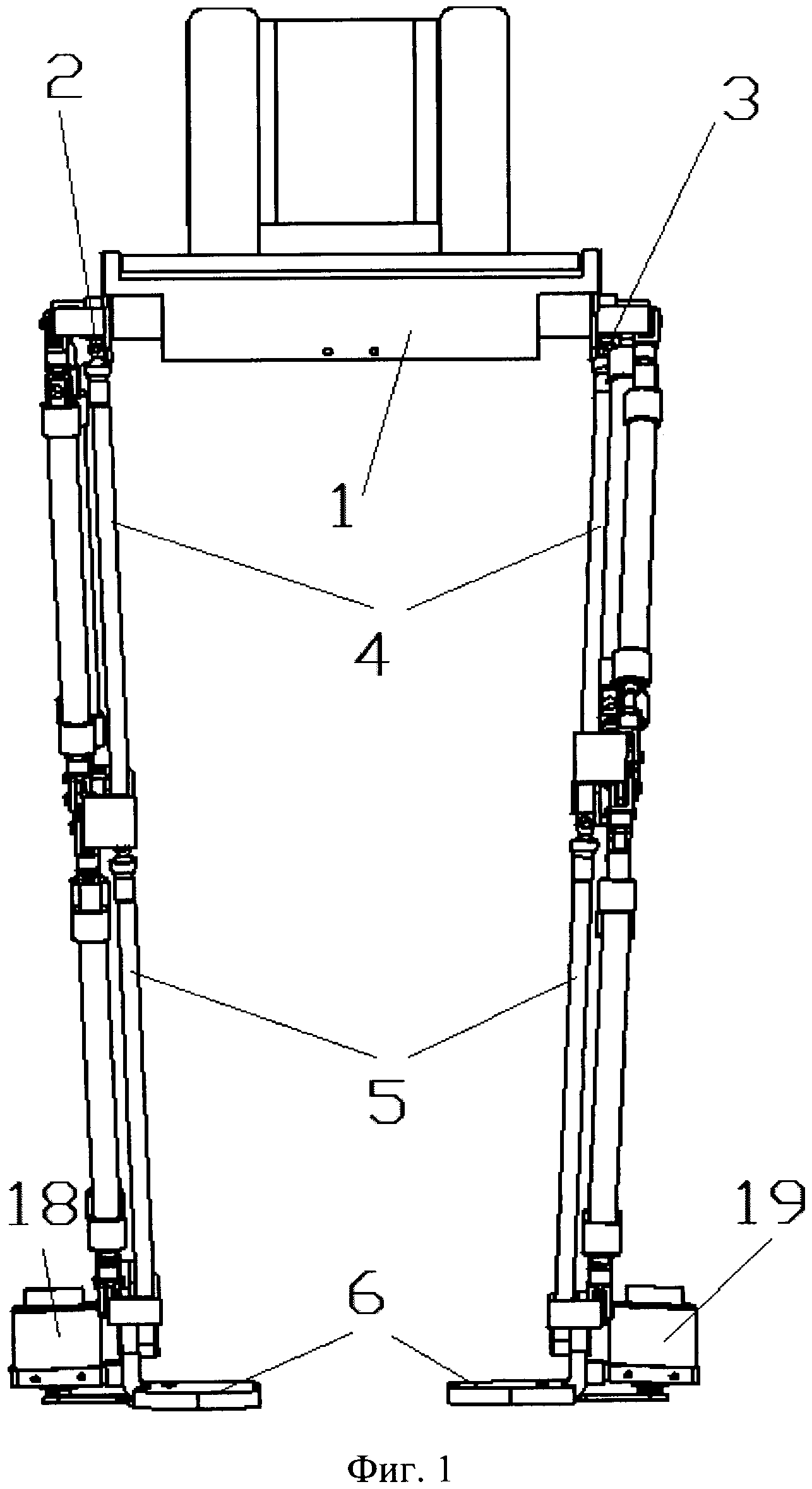
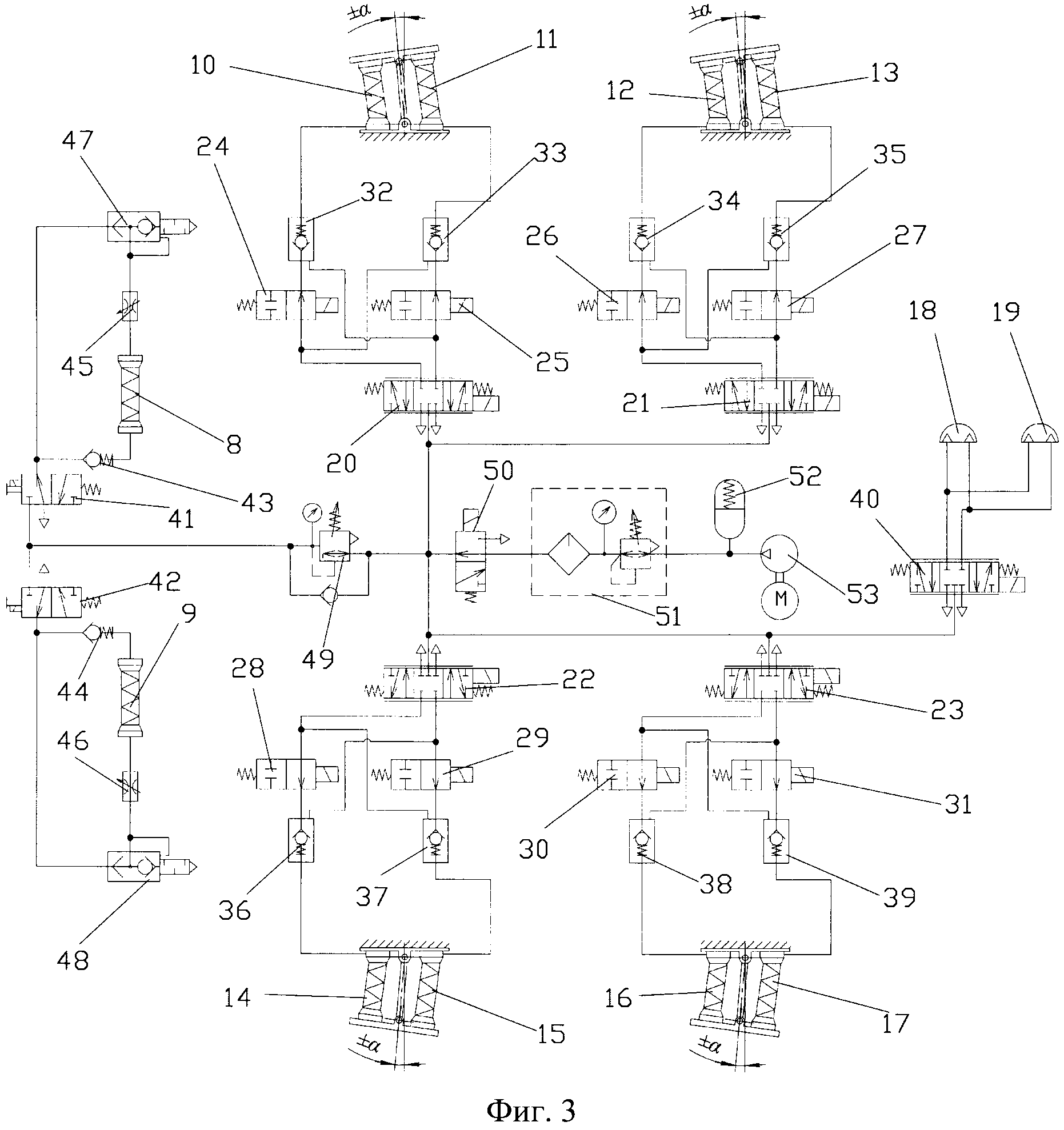
Сущность изобретения поясняется чертежами. На фиг. 1 и фиг. 2 изображена компоновочная схема, на фиг. 3 - принципиальная пневматическая схема экзоскелета.
Силовой каркас (фиг. 1, фиг. 2) содержит опорную раму 1 с шаровыми шарнирами 2, 3, в которых закреплены опорные стойки, в свою очередь, состоящие из тазобедренных 4, коленных 5 и голеностопных 6 звеньев. Голеностопные звенья имеют пассивную степень свободы в виде пружины 7.
Девятый 8, десятый 9, первый 10, второй 11, третий 12 и четвертый 13 пневмомускулы шарнирно связаны с тазобедренным звеном 4 конструкции, пятый 14, шестой 15, седьмой 16 и восьмой 17 пневмомускулы шарнирно связаны с коленным 5 звеном конструкции. Первый 18 и второй 19 поворотные пневмодвигатели закреплены на голеностопных 6 звеньях.
Пневматическая система экзоскелета (фиг. 3) включает в себя следующие подсистемы:
- систему стабилизации движения, предназначенную для поддержания равновесия экзоскелета при ходьбе;
- систему передвижения, которая осуществляет локомоторную функцию;
- систему поворота экзоскелета вокруг центральной оси.
Система передвижения экзоскелета состоит из первого 10, второго 11, третьего 12, четвертого 13, пятого 14, шестого 15, седьмого 16 и восьмого 17 пневмомускулов, связанных с ними первого 20, второго 21, третьего 22, четвертого 23 пропорциональных пневмораспределителей, первого 24, второго 25, третьего 26, четвертого 27, пятого 28, шестого 29, седьмого 30 и восьмого 31 двухлинейных двухпозиционных пневмораспределителей, шести датчиков давления, расположенных на подошвах устройства, и шести датчиков угла поворота, расположенных в суставах экзоскелета.
В нагнетательных линиях первого 10, второго 11, третьего 12, четвертого 13, пятого 14, шестого 15, седьмого 16 и восьмого 17 пневмомускулов вмонтированы первый 32, второй 33, третий 34, четвертый 35, пятый 36, шестой 37, седьмой 38 и восьмой 39 обратные клапаны с пневматическим сигналом.
Система поворота вокруг центральной оси состоит из первого 18, второго 19 поворотных пневмодвигателей и пропорционального пневмораспределителя 40.
Система стабилизации состоит из девятого 8 и десятого 9 пневмомускулов, второго 41 и третьего 42 трехлинейных двухпозиционных пневмораспределителей с электронным управлением, первого 43 и второго 44 обратных клапанов, первого 45 и второго 46 регулируемых дросселей, первого 47 и второго 48 клапанов быстрого выхлопа.
Второй 41 и третий 42 трехлинейные двухпозиционные пневмораспределители связаны с регулятором давления 49, который, в свою очередь, связан с первым трехлинейным двухпозиционным пневмораспределителем 50. Первый трехлинейный двухпозиционный пневмораспределитель 50 связан через блок подготовки воздуха 51 с пневмоаккумулятором 52 и компрессором 53.
Устройство работает следующим образом: компрессор 53 нагнетает сжатый воздух в пневмосистему, наполняя при этом пневмоаккумулятор 52. При прохождении через блок подготовки 51 производится очистка сжатого воздуха. Первый трехлинейный двухпозиционный пневмораспределитель 50 служит для подачи сжатого воздуха к системам передвижения, стабилизации и поворота. С помощью регулятора давления 49 устанавливается определенное давление, которое регулируется степенью затяжки пружины и контролируется датчиком давления.
Система передвижения экзоскелета состоит из первого 10, второго 11, третьего 12, четвертого 13, пятого 14, шестого 15, седьмого 16 и восьмого 17 пневмомускулов. Управление пневмомускулами осуществляется за счет первого 20, второго 21, третьего 22, четвертого 23 пропорциональных пневмораспределителей, а также первого 24, второго 25, третьего 26, четвертого 27, пятого 28, шестого 29, седьмого 30 и восьмого 31 двухлинейных двухпозиционных пневмораспределителей с электронным управлением. Управляющие сигналы на пневмораспределители подает контроллер, который, в свою очередь, получает информацию от шести датчиков давления, расположенных на подошвах устройства, комбинированной микроэлектромеханической системы, включающей акселерометр, гироскоп и инклинометр, расположенной максимально близко к центру тяжести экзоскелета, и, за счет обратной связи, от шести датчиков угла поворота, расположенных непосредственно на каждом суставе.
В нагнетательных линиях первого 10, второго 11, третьего 12, четвертого 13, пятого 14, шестого 15, седьмого 16 и восьмого 17 пневмомускулов для отбора давления вмонтированы первый 32, второй 33, третий 34, четвертый 35, пятый 36, шестой 37, седьмой 38 и восьмой 39 управляемые обратные клапаны с управляющим пневматическим сигналом.
Система поворота вокруг центральной оси состоит из первого 18 и второго 19 поворотных пневмодвигателей. Управление пневмодвигателями осуществляется пропорциональным пневмораспределителем 40 посредством подачи на него электросигнала от контроллера.
Система стабилизации состоит из девятого 8 и десятого 9 пневмомускулов, отводящих ноги в сагиттальной плоскости для поддержания устойчивости при движении. Управление пневмомускулами осуществляется при помощи второго 41 и третьего 42 трехлинейных двухпозиционных пневмораспределителей с электронным управлением, первого 43 и второго 44 обратных клапанов, первого 45 и второго 46 регулируемых дросселей, первого 47 и второго 48 клапанов быстрого выхлопа. Электронное управление осуществляется аналогично при помощи контроллера.
Заявляемое изобретение снижает массогабаритные показатели и повышает эксплуатационные характеристики экзоскелета, в том числе реализует распределение нагрузки посредством пропорционального управления, развивает при передвижении стабильную скорость и плавность хода, обеспеченную применением «мягких» бескаркасных пневмодвигателей. Использование компактного и мощного компрессора позволяет сделать устройство автономным, что дает возможность эксплуатировать экзоскелет людям с нарушениями опорно-двигательного аппарата в качестве мобильного средства для реабилитации.
Экзоскелет, состоящий из силового каркаса, который включает в себя опорную раму с шарнирами, в которых закреплены опорные стойки, в свою очередь, состоящие из тазобедренных, коленных и голеностопных звеньев, и электропневматической системы, содержащей первый пневмомускул, первый, второй, третий и четвертый двухлинейные двухпозиционные пневмораспределители, первый трехлинейный двухпозиционный пневмораспределитель, регулятор давления, контроллер и компрессор, причем первый, второй, третий и четвертый двухлинейные и двухпозиционные пневмораспределители и трехлинейный двухпозиционный пневмораспределитель электрически связаны с контроллером, отличающийся тем, что содержит второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый пневмомускулы, первый и второй неполноповоротные пневмодвигатели, первый, второй, третий, четвертый и пятый пропорциональные пневмораспределители, пятый, шестой, седьмой и восьмой двухлинейные двухпозиционные пневмораспределители, второй и третий трехлинейные двухпозиционные пневмораспределители, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой управляемые обратные клапаны, первый и второй клапаны быстрого выхлопа, первый и второй обратные клапаны, первый и второй дроссели, блок подготовки воздуха, пневмоаккумулятор, электроаккумулятор, систему управления, состоящую из комбинированной микроэлектромеханической системы, включающей акселерометр, инклинометр, гироскоп, датчики давления и угла поворота, при этом первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой пневмомускулы пневматически связаны с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым двухлинейными двухпозиционными пневмораспределителями через первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой управляемые обратные клапаны соответственно, а первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой двухлинейные двухпозиционные пневмораспределители пневматически связаны с первым, вторым, третьим и четвертым пропорциональными пневмораспределителями соответственно, девятый и десятый пневмомускулы пневматически связаны с первым и вторым клапанами быстрого выхлопа через первый и второй дроссели, а также со вторым и третьим трехлинейными пневмораспределителями через первый и второй обратные клапаны, концы пневмомускулов шарнирно соединены с тазобедренными и коленными элементами силового каркаса, первый и второй неполноповоротные пневмодвигатели пневматически соединены с пятым пропорциональным пневмораспределителем, первый, второй, третий, четвертый и пятый пропорциональные пневмораспределители пневматически связаны с первым трехлинейным двухпозиционным пневмораспределителем, второй и третий трехлинейные двухпозиционные пневмораспределители пневматически связаны с регулятором давления, который, в свою очередь, пневматически связан с первым трехлинейным двухпозиционным пневмораспределителем, а первый трехлинейный двухпозиционный пневмораспределитель пневматически связан через блок подготовки воздуха с пневмоаккумулятором и компрессором, шесть датчиков давления и шесть датчиков угла поворота электрически связаны с контроллером, который, в свою очередь, электрически связан с первым, вторым, третьим, четвертым и пятым пропорциональными пневмораспределителями, первым, вторым и третьим трехлинейными двухпозиционными пневмораспределителями, первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым двухлинейными двухпозиционными распределителями.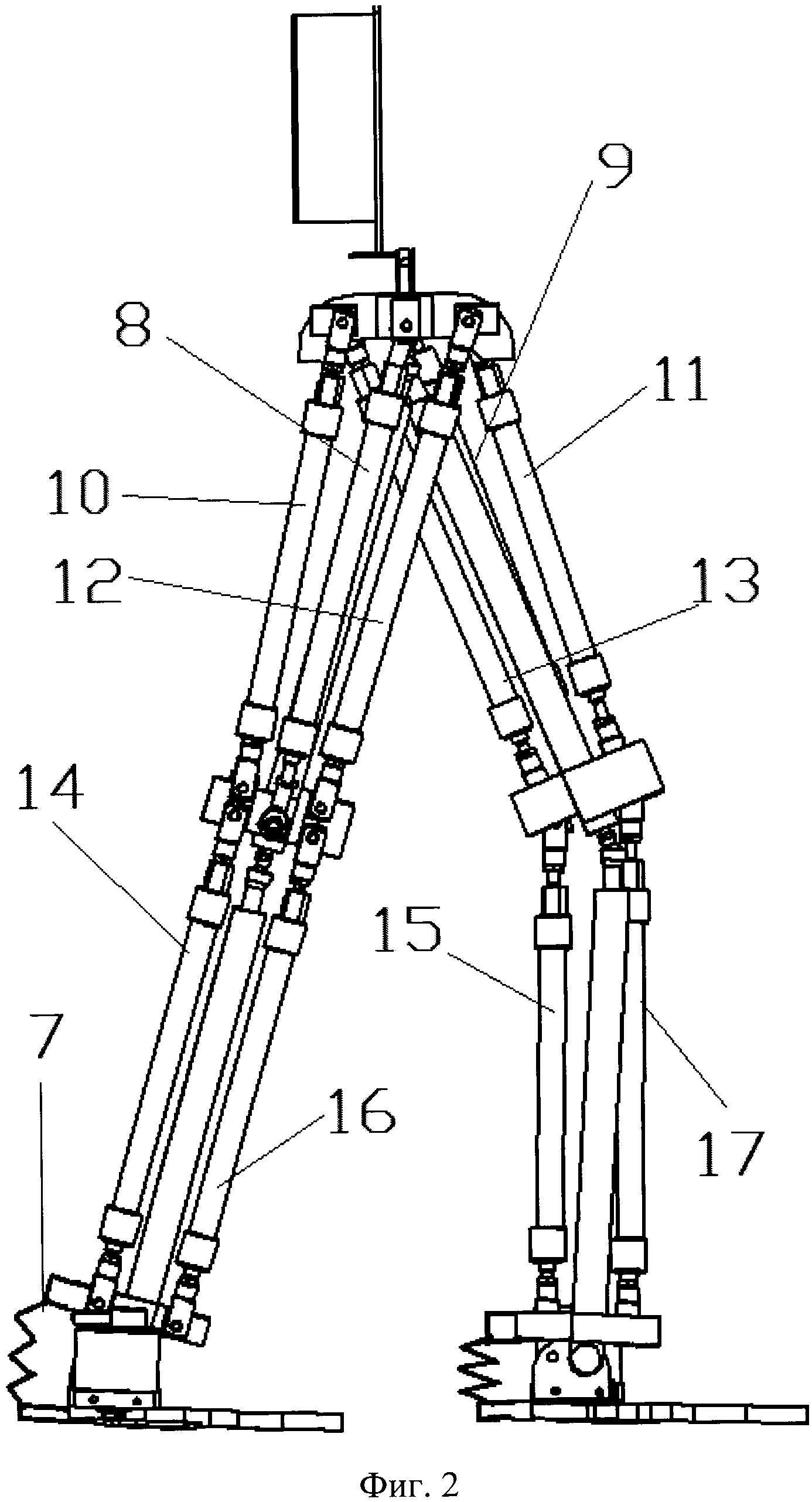
Заготовка для изготовления полой лопатки турбомашины способом сверхпластической формовки
Способ диагностики помпажа компрессора газотурбинного двигателя
Ветроэнергетическая установка
Магнитогидродинамическое устройство (варианты)
Способ локальной обработки материала с эффектом полого катода при ионном азотировании
Высокоскоростная бесконтактная электрическая машина (варианты)
Способ локальной обработки материала с эффектом полого катода при ионном азотировании
Способ локальной обработки материала при азотировании в тлеющем разряде
Способ термомеханической обработки для повышения технологической пластичности объемных полуфабрикатов из al-cu-mg-ag сплавов
Способ определения критической температуры резания
Многофункциональное походное спасательное устройство
Устройство комплексной очистки бессточных водоемов
Способ контроля состояния грузов при перевозках
Система жидкостного охлаждения статора электрических машин автономных объектов
Газопромыватель
Способ и устройство управления положением ротора в магнитных подшипниках
Гидродинамический пылеуловитель
Способ дистанционного тестирования приборов акустического каротажа в полевых условиях
Ветроустановка
Система подзарядки аккумулятора электрического беспилотного летательного аппарата

