Результат интеллектуальной деятельности: МАНЕВРЫ ПРИ УПРАВЛЕНИИ ПОВОРОТОМ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, в общем, к погрузочно-разгрузочным транспортным средствам, более конкретно - к отслеживанию объектов и корректирующим схемам руления погрузочно-разгрузочных транспортных средств, таких как дистанционно управляемые подъемники-загрузчики низкого уровня.
УРОВЕНЬ ТЕХНИКИ
[0002] Подъемники-загрузчики низкого уровня обычно используются для загрузки-разгрузки и перемещения материалов на складах и в распределительных центрах. Такие подъемники-загрузчики обычно включают в себя вилочный захват (грузовые вилы) и приводной узел, имеющий площадку, на которую поднимается и едет оператор, управляющий подъемником-загрузчиком. Приводной узел также имеет управляемое (поворотное) колесо и соответствующие механизмы регулирования тяги и управления направлением движения, например, шарнирный рычаг рулевого управления, соединенный с рулевым колесом. Ручка управления, присоединенная к рычагу рулевого управления, обычно включает в себя органы управления, необходимые для вождения подъемника-загрузчика и управления его погрузочно-разгрузочными средствами (функциями).
[0003] В ходе обычной процедуры комплектования оператор выполняет сбор заказов из имеющихся товаров, расположенных в зонах хранения вдоль большого числа проходов склада или распределительного центра. Поэтому оператор ведет подъемник-загрузчик низкого уровня к первому месту где надо подобрать товар(ы). В процессе подбора товара оператор обычно сходит с подъемника-загрузчика, идет к соответствующему месту и достает заказанный(е) товар(ы) из зоны (зон) хранения товара. Затем оператор возвращается к подъемнику-загрузчику и укладывает выбранные товары на поддон, в комплектовочный контейнер, или в иную несущую конструкцию, перемещаемую на вилах подъемника-загрузчика. По завершении процесса подбора товара оператор перемещает подъемник-загрузчик к следующему месту, где необходимо подобрать товар(ы). Вышеописанный процесс повторяется, пока не будут подобраны все товары по заказу.
[0004] Нередко оператору необходимо повторять процесс подбора для одного заказа несколько сотен раз. Кроме того, оператору может потребоваться скомплектовать несколько заказов за смену. Соответственно, оператору может понадобиться большое количество времени для перемещения подъемника-загрузчика, что уменьшает время на подборку товаров.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0005] В соответствии с различными аспектами настоящего изобретения, предлагаются способы и системы для того, чтобы погрузочно-разгрузочные транспортные средства автоматически выполняли корректирующий маневр поворота. Данные датчика принимаются по меньшей мере от одного сенсорного устройства контроллером на погрузочно-разгрузочном транспортном средстве. Полученные данные датчика используются для определения того, находится ли объект в пространстве, контролируемом контроллером, т.е. в пространстве включающем в себя область вокруг транспортного средства. Если объект обнаруживается в этом пространстве, определяется, насколько далеко обнаруженный объект находится от опорной координаты, связанной с транспортным средством. Корректирующий маневр поворота автоматически выполняется путем выполнения увода поворотом транспортного средства от обнаруженного объекта, где угол корректировки поворота зависит от того, насколько далеко от опорной координаты определяется обнаруженный объект.
[0006] В соответствии с другими аспектами настоящего изобретения, предлагаются способы для того, чтобы погрузочно-разгрузочные транспортные средства автоматически выполняли корректирующие маневры поворота. Данные датчика принимаются по меньшей мере от одного сенсорного устройства контроллером на погрузочно-разгрузочном транспортном средстве. Полученные данные датчика используются для определения того, находится ли объект в пространстве, контролируемом контроллером, т.е. в пространстве, которое включает в себя область вокруг транспортного средства. Если объект обнаруживается в этом пространстве, определяется, насколько далеко обнаруженный объект находится от транспортного средства. Корректирующие маневры поворота автоматически выполняется путем выполнения увода поворотом транспортного средства от обнаруженного объекта, где угол корректировки поворота зависит от того, насколько далеко от транспортного средства определяется обнаруженный объект.
[0007] В соответствии с другими аспектами настоящего изобретения, предлагаются способы для того, чтобы погрузочно-разгрузочные транспортные средства автоматически выполняли корректирующие маневры поворота. Данные датчика принимаются по меньшей мере от одного сенсорного устройства контроллером на погрузочно-разгрузочном транспортном средстве. Полученные данные датчика используются для определения того, находится ли объект в пространстве, контролируемом контроллером, т.е. в пространстве включающее в себя область вокруг транспортного средства. Если объект обнаруживается в этом пространстве, определяется, насколько далеко обнаруженный объект находится от опорной координаты, связанной с транспортным средством. Маневр корректировки поворота автоматически выполняется путем увода поворотом транспортного средства от обнаруженного объекта, где скорость изменения угла поворота, который реализуется для достижения требуемого угла корректировки поворота, зависит от того, насколько далеко от опорной координаты определяется обнаруженный объект.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 - иллюстрация погрузочно-разгрузочного транспортного средства, работающего под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения;
[0009] Фиг. 2 - схематическое представление различных компонентов погрузочно-разгрузочного транспортного средства, работающего под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения.
[0010] Фиг. 3 - схематическое представление, иллюстрирующее зоны обнаружения погрузочно-разгрузочного транспортного средства согласно различным аспектам настоящего изобретения.
[0011] Фиг. 4 - схематическое представление, иллюстрирующее пример метода для обнаружения объекта согласно различным аспектам настоящего изобретения.
[0012] Фиг. 5 - схематическое представление, иллюстрирующее множество зон обнаружения погрузочно-разгрузочного транспортного средства согласно дальнейшим аспектам настоящего изобретения.
[0013] Фиг. 6 - иллюстрация погрузочно-разгрузочного транспортного средства, имеющего разнесенные в пространстве детекторы препятствий согласно различным аспектам настоящего изобретения.
[0014] Фиг. 7 - иллюстрация погрузочно-разгрузочного транспортного средства, имеющего детекторы препятствий согласно дальнейшим аспектам настоящего изобретения.
[0015] Фиг. 8 - иллюстрация погрузочно-разгрузочного транспортного средства, имеющего детекторы препятствий согласно другим дополнительным аспектам настоящего изобретения.
[0016] Фиг. 9 - структурная блок-схема системы управления погрузочно-разгрузочного транспортного средства, которая соединена с датчиками для обнаружения объектов на пути перемещения транспортного средства в соответствии с различными аспектами настоящего изобретения.
[0017] Фиг. 10 - блок-схема способа выполнения корректировки поворота (направления движения) в соответствии с различными аспектами настоящего изобретения.
[0018] Фиг. 11 - схематическая иллюстрация погрузочно-разгрузочного транспортного средства, движущегося по узкому проходу склада под беспроводным дистанционным управлением, которое автоматически выполняет корректирующий маневр поворота в соответствии с различными аспектами настоящего изобретения.
[0019] Фиг. 12 - график, иллюстрирующий пример скорости погрузочно-разгрузочного транспортного средства, на которой выполняется корректирующий маневр поворота под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения.
[0020] Фиг. 13 - график, иллюстрирующий пример входных данных в зоне поворота бампера для контроллера, который показывает, воспринимается ли объект в левой или правой зонах поворота бампера, согласно различным аспектам настоящего изобретения.
[0021] Фиг. 14 - график, иллюстрирующий пример корректировки поворота в градусах для приведения иллюстративного примера корректирующего маневра поворота, применительно к погрузочно-разгрузочному транспортному средству под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения.
[0022] Фиг. 15А-15С - схематические иллюстрации примера окружающего пространства (окружающей обстановки), используемого в связи с отслеживанием объектов в погрузочно-разгрузочном транспортном средстве, движущегося под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения.
[0023] Фиг. 16А-16С - схематические иллюстрации примера зон, используемых для выполнения маневров поворота в погрузочно-разгрузочном транспортном средстве, движущегося под беспроводным дистанционным управлением согласно различным аспектам настоящего изобретения.
[0024] Фиг. 17А-17С - схематические иллюстрации погрузочно-разгрузочного транспортного средства, движущегося по проходу склад под беспроводным дистанционным управлением, которое автоматически реализует маневры поворота в соответствии с различными аспектами настоящего изобретения.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0025] Следующее подробное описание пояснительных вариантов осуществления настоящего изобретения содержит ссылки на сопроводительные чертежи, которые являются его частью, и которые показывают путем иллюстрирования, но не ограничения, конкретные варианты осуществления настоящего изобретения, в которых оно может быть реализовано. Следует понимать, что могут быть использованы иные варианты осуществления и могут быть внесены изменения, не выходящие за пределы сущности и объема различных вариантов осуществления настоящего изобретения.
Подъемник-загрузчик низкого уровня:
[0026] Как видно из чертежей, в частности, на фиг. 1, погрузочно-разгрузочное транспортное средство, представленное как подъемник-загрузчик низкого уровня 10, включает в себя, в общем, грузозахватный узел 12, выступающий из приводного узла 14. Грузозахватный узел 12 включает пару вил 16, при этом каждая из вил 16 имеет несущий колесный узел 18. Грузозахватный узел 12 может включать в себя другие грузозахватные элементы в дополнение к или вместо проиллюстрированной конструкции вил 16, такие как решетку ограждения груза, подъемные вилы ножничного типа, выдвижными или отдельно регулируемыми по высоте вилами. Кроме того, грузозахватный узел 12 также может включать в себя такие грузозахватные средства, как мачту, грузовую платформу, комплектовочный контейнер или иные опорные (несущие) конструкции, перевозимые вилами 16, или иным образом предусмотренные для погрузки-разгрузки и перевозимые подъемником-загрузчиком 10.
[0027] Иллюстрируемый приводной узел 14 включает в себя проходное рабочее место оператора, отделяющее первую краевую зону приводного узла 14 (напротив вил 16) от второй краевой зоны (рядом с вилами 16). Проходное рабочее место оператора имеет площадку, на которой оператор может стоять для управления подъемником-загрузчиком 10 и/или для обеспечения положения, с которого оператор может управлять различными имеющимися средствами подъемника-загрузчика 10.
[0028] Можно установить датчики 58 присутствия для обнаружения присутствия оператора на подъемнике-загрузчике 10. Например, датчики 58 присутствия можно расположить на, над или под днищем площадки, или расположить иным образом около рабочего места оператора. В примере подъемника-загрузчика на фиг. 1 датчики 58 присутствия показаны пунктирными линиями, указывающими на то, что они размещены под днищем площадки. При таком конструктивном исполнении датчики 58 присутствия могут включать датчики нагрузок, выключатели и т.п. В качестве альтернативы, датчики присутствия 58 могут быть размещены над полом площадки, например, с использованием ультразвуковой, емкостной или иной подходящей сенсорной технологии. Использование датчиков 58 присутствия будет более подробно описано далее.
[0029] Антенна 66 проходит вертикально от приводного узла 14 и сделана для приема сигналов управления от соответствующего устройства 70 беспроводного дистанционного управления. Устройство 70 беспроводного дистанционного управления может включать в себя передатчик, который носит или иным образом имеет при себе оператор. Устройство 70 дистанционного управления вручную задействуется оператором, например, путем нажатия кнопки или иного органа управления, чтобы заставить устройство 70 дистанционного управления осуществить передачу по беспроводной связи по меньшей мере сигнала первого типа, означающего запрос на перемещение подъемника-загрузчика 10. Запрос на перемещение - это команда, которая требует перемещения соответствующего подъемника-загрузчика 10 на заданную величину, как будет более подробно описано далее.
[0030] Подъемник-загрузчик 10 также включает один или более датчиков 76 обнаружения препятствий, которые установлены по окружности подъемника-загрузчика 10, например, в первой краевой зоне приводного узла 14 и/или по сторонам приводного узла 14. Датчики 76 обнаружения препятствий включают в себя, по меньшей мере, один бесконтактный датчик обнаружения препятствий на подъемнике-загрузчике 10, и задействуются для определения по меньшей мере одной зоны обнаружения. Например, по меньшей мере одна зона обнаружения может определять область по меньшей мере, частично, перед направлением перемещения вперед подъемника-загрузчика 10, когда подъемника-загрузчика 10 перемещается, реагируя на полученный запрос по беспроводной связи на перемещение от устройства 70 дистанционного управления, как также будет более подробно описано далее.
[0031] Датчики 76 обнаружения препятствий могут использовать любую подходящую технологию бесконтактного обнаружения приближения объекта, например, ультразвуковые датчики, оптические устройства распознавания, инфракрасные датчики, датчики лазерного сканера и т.п., которые способны детектировать присутствие объектов/препятствий или способны генерировать сигналы, которые можно проанализировать для определения присутствия объектов/препятствий в пределах заданных(ой) зон(ы) обнаружения приводного узла 14.
[0032] На практике подъемник-загрузчик 10 может быть реализован в других конструкциях, видах и конфигурациях, например, в виде подъемника поддонов с контролем торца (конца), включающего в себя рычаг штурвальчика управления поворотом, соединенный с рукояткой для поворота подъемником-загрузчиком. Аналогично, хотя устройство 70 дистанционного управления проиллюстрировано как конструкция 70 наподобие перчатки, можно реализовать различные исполнения устройства 70 дистанционного управления, включающие, например, носимые на пальце, закрепляемые на ремне или на поясе и т.п. Более того, подъемник-загрузчик, система дистанционного управления и/или их узлы, включая устройство 70 дистанционного управления, могут содержать любые дополнительные и/или альтернативные средства или технические осуществления, примеры которых раскрыты в предварительном описании в заявке на патент США №60/825,688, поданной 14 сентября 2006 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», заявке на патент США №11/855,310, поданной 14 сентября 2007 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE)), заявке на патент США №11/855,324, поданной 14 сентября 2007 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE)), в предварительном описании заявки на патент США №61/222,632, поданной 2 июля 2009 г., с названием «APPARATUS FOR REMOTELY CONTROLLING A MATERIAL HANDLING VAHICLE», в заявки на патент США №12/631,007, поданной 4 декабря 2009 г., с названием «MULTIPLE ZONE SENSING FOR MATERIALS HANDLING VEHICLES)), в предварительном описании заявки на патент США №61/119,952, поданной 4 декабря 2008 г., с названием «MULTIPLE ZONE SENSING FOR REMOTELY CONTROLLED MATERIALS HANDLING VEHICLES", и/или в патенте США №7,017,689, выданном 28 марта 2006 г., с названием «ELECTRICAL STEERINF ASSIST FOR MATERIAL HANDLING VEHICLE», содержание которых было включено в настоящий документ путем ссылки.
Система управления для дистанционного управления подъемником-загрузчиком низкого уровня
[0033] Блок-схема, приведенная на фиг.2, иллюстрирует систему управления для интегрирования команд дистанционного управления с подъемником-загрузчиком 10. Антенна 66 подсоединена к приемнику 102 для приема команд от устройства 70 дистанционного управления (ДУ). Приемник 102 передает принятые сигналы управления контроллеру 103, который выполняет соответствующие действия в ответ на полученные команды и, таким образом, также может в настоящем документе называться главным контроллером. В этой связи, контроллер 103 реализован как аппаратное средство, и может также осуществлять реализацию программного обеспечения (включая прошивки, резидентное программное обеспечение, микрокод и т.п.). Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного в одном или нескольких машиночитаемом(ых) носителе(ях), имеющем(их) машиночитаемый программный код, реализованный на нем (них), например, подъемник-загрузчик 10 может включать в себя память, которая хранит компьютерный программный продукт, который, при его выполнении процессором контроллера 103, осуществляет корректировку управления поворотом, как более подробно описано в данном документе.
[0034] Таким образом, контроллер 103 может определить по меньшей мере частично, систему обработки данных, подходящую для хранения и/или выполнения программного кода, и может включать, по меньшей мере, один процессор, связанный напрямую или опосредованно с элементами памяти, например, посредством системной шины или иного подходящего соединения. Элементы памяти могут включать в себя локальную память, используемую во время фактического исполнения программного кода, память, которая интегрирована в микроконтроллер, или специализированную интегральную схему (ASIC), программируемую логическую матрицу или иное многократно настраиваемое устройство обработки и т.п.
[0035] Отклик, осуществляемый контроллером 103 в ответ на принятую по беспроводной связи команду, например, посредством радиопередатчика устройства 70 ДУ и соответствующей антенны 66 и приемника 102, может включать в себя одно или несколько действий (активных состояний) или неактивное состояние, в зависимости от реализуемой логики. Принудительные действия могут включать в себя управление, регулировку или иное воздействие на один или несколько компонентов подъемника-загрузчика 10. Контроллер 103 может также получать информацию от иных устройств 104 ввода, например, от таких источников, как датчики 58 присутствия, датчики 76 обнаружения препятствий, переключатели, датчики нагрузки, датчики положения (кодовые датчики) и иных устройств/средств, имеющихся на подъемнике-загрузчике 10 для определения соответствующего действия в ответ на команды, полученные от устройства 70 дистанционного управления. Датчики 58, 76 и т.п. могут быть связаны с контроллером 103 посредством устройств 104 ввода либо посредством соответствующей сети подъемника-загрузчика, такой как шина 110 сети контроллеров (CAN).
[0036] В примере конструктивного исполнения, устройство 70 дистанционного управления используется для передачи по беспроводной связи сигнала управления, представляющего собой сигнал первого типа, такой как команда на перемещение, на приемник 102 на подъемнике-загрузчике 10. Команда на перемещение также упоминается в данном документе, как «сигнал перемещения», «запрос на перемещение» или «сигнал движения». Запрос на перемещение используется для инициирования запроса к подъемнику-загрузчику 10 на перемещение на заранее определенную величину, например, чтобы заставить подъемник-загрузчик 10 переместиться вперед или двигаться толчками в первом направлении на ограниченную длину пути. Первое направление можно определить, например, как перемещение подъемника-загрузчика 10 приводным узлом 14 вперед, то есть, вилы 16 направлены назад. Однако альтернативно можно определить и иные направления движения. Кроме того, подъемником-загрузчиком 10 можно управлять для перемещения, обычно, в прямом направлении или по предварительно определенному маршруту (курсу). Соответственно, ограниченную длину пути можно определить по приблизительному расстоянию перемещения, времени перемещения или по иным параметрам.
[0037] Таким образом, сигнал первого типа, принятый приемником 102, передается контроллеру 103. Если контроллер 103 определит, что сигнал перемещения является действительным сигналом перемещения, и что текущее состояние транспортного средства соответствует нужному (подробнее пояснено ниже), контроллер 103 подает сигнал соответствующей цепи управления конкретного подъемника-загрузчика 10 на перемещение вперед, а затем на остановку подъемника-загрузчика 10. Остановку подъемника-загрузчика 10 можно реализовать, например, либо позволяя подъемнику-загрузчику 10 двигаться до остановки по инерции (накатом), либо инициируя работу тормоза, чтобы заставить подъемник-загрузчик 10 тормозиться до остановки.
[0038] Как пример, контроллер 103 может быть связан с возможностью обмена информацией с системой управления тягой, проиллюстрированной, как контроллер 106 тягового двигателя подъемника-загрузчика 10. Контроллер 106 тягового двигателя поддерживает связь с тяговым двигателем 107, приводящим в движение по меньшей мере одно управляемое колесо 108 подъемника-загрузчика 10. Контроллер 103 может связываться с контроллером 106 тягового двигателя таким образом, чтобы ускорять, замедлять, регулировать и/или иным образом ограничивать скорость подъемника-загрузчика 10 в ответ на получение запроса на перемещение от устройства 70 дистанционного управления. Контроллер 103 также может быть связан, с возможностью информационного обмена, с контроллером 112 поворотом, который связан с двигателем 114 управления поворотом, осуществляющим управление поворотом по меньшей мере одного управляемого колеса 108 подъемника-загрузчика 10. В связи с этим, подъемником-загрузчиком 10 можно управлять через контроллер 103 для прохождения намеченного пути или поддержания намеченного направления движения в ответ на получение запроса на перемещение от устройства 70 дистанционного управления.
[0039] В качестве еще одного иллюстративного примера, контроллер 103 можно соединить с возможностью информационного обмена с контроллером 116 тормоза, который управляет тормозами 117 подъемника-загрузчика для замедления, остановки или по-другому управлять скоростью подъемника-загрузчика 10 в ответ на получение запроса на перемещение от устройства 70 дистанционного управления. Более того, контроллер 103 можно соединить с возможностью информационного обмена с иными функциональными компонентами (средствами) транспортного средства, такими, как главные контакторы 118 и/или другие устройства 119 вывода, связанные с подъемником-загрузчиком 10, где это применимо, для реализации желаемых действий в ответ на реализацию дистанционно управляемой функции перемещения.
[0040] В соответствии с различными аспектами настоящего изобретения, контроллер 103 можно связать с приемником 102 и с контроллером 106 тяги для использования подъемника-загрузчика 10 под дистанционным управлением в ответ на получение команд на перемещения от связанного с ним устройства 70 дистанционного управления. Кроме того, контроллер 103 можно настроить на выполнение первого действия, если подъемник-загрузчик 10 перемещается под дистанционным управлением в ответ на запрос на перемещение, и обнаруживается препятствие в какой-либо первой из ранее упомянутых зон(е) обнаружения. Контроллер 103 можно дополнительно настроить на выполнение второго действия, отличного от первого действия, если подъемник-загрузчик 10 перемещается под дистанционным управлением в ответ на запрос на перемещение, и обнаруживается препятствие в какой-либо второй из зон обнаружения. В этой связи, при получении контроллером 103 запроса на перемещение от устройства 70 дистанционного управления, любое число факторов может учитываться контроллером 103 для определения того, нужно ли по полученному сигналу на перемещение начать и/или продолжать движение подъемника-загрузчика 10.
[0041] Соответственно, если подъемник-загрузчик 10 движется в ответ на команду, полученную устройством беспроводного дистанционного управления, контроллер 103 может динамически изменять, управлять, настраивать или иным образом влиять на работу дистанционного управления, например, останавливать подъемник-загрузчик 10, изменять угол поворота подъемника-загрузчика 10, или предпринимать иные действия. Таким образом, определенные функции транспортного средства, состояние/условия одного или нескольких функциональных компонентов транспортного средства, пространство вокруг транспортного средства и т.п., могут влиять на то, как контроллер 103 отреагирует на запросы на перемещение от устройства 70 дистанционного управления.
[0042] Контроллер 103 может отклонить подтверждение принятого запроса перемещения, в зависимости от предварительно определенного(ых) условия(й), например, относящегося(ихся) к окружающему пространству или эксплуатационным факторам. Например, контроллер 103 может игнорировать иным образом действительный запрос на перемещение на основе информации, полученной от одного или нескольких датчиков 58, 76. В качестве иллюстрации, в соответствии с различными аспектами настоящего изобретения, контроллер 103 может дополнительно рассматривать такие факторы, как: находится ли оператор на подъемнике-загрузчике 10, при определении того, реагировать ли на команду на перемещения от устройства 70 дистанционного управления. Как отмечалось выше, подъемник-загрузчик 10 может содержать по меньшей мере один датчик 58 присутствия для определения нахождения оператора на подъемнике-загрузчике 10. В этой связи, контроллер 103 можно далее настроить на реагирование на запрос на перемещение для использования подъемника-загрузчика 10 под дистанционным управлением, когда датчик(и) 58 присутствия определяет(ют), что оператор не находится на подъемнике-загрузчике 10. Таким образом, в этом варианте осуществления подъемник-загрузчик 10 нельзя использовать в ответ на команды по беспроводной связи от передатчика, кроме случаев, когда оператор физически находится вне подъемника-загрузчика 10. Аналогично, если датчики 76 обнаружения объекта детектируют, что объект, включая оператора, соседствует и/или находится вблизи от подъемника-загрузчика 10, контроллер 103 может отклонить подтверждение запроса на перемещение от передатчика устройства 70 ДУ. Таким образом, в примере реализации, оператор должен находиться на ограниченной дальности от подъемника-загрузчика 10, например, достаточно близко к подъемнику-загрузчику 10, чтобы быть в радиусе действия беспроводной связи (которую можно ограничить установкой максимального расстояния от оператора до подъемника-загрузчика 10). Альтернативно могут реализовываться и другие схемы организации.
[0043] Любое иное количество обоснованных условий, факторов, параметров или иных соображений можно также/альтернативно выполняться контроллером 103 для интерпретации и осуществления действий в ответ на принимаемые сигналы от передатчика. Иные примеры факторов более подробно изложены в предварительном описании в заявке на патент США №60/825,688 с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», заявке на патент США №11/855,310 с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», заявке на патент США №11/855,324 с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE)), в предварительном описании заявки на патент США №61/222,632 с названием «APPARATUS FOR REMOTELY CONTROLLING A MATERIAL HANDLING VAHICLE», в заявки на патент США №12/631,007 с названием «MULTIPLE ZONE SENSING FOR MATERIALS HANDLING VEHICLES)), в предварительном описании заявки на патент США №61/119,952 с названием ((MULTIPLE ZONE SENSING FOR REMOTELY CONTROLLED MATERIALS HANDLING VEHICLES)), содержание которых было включено в настоящий документ путем ссылки.
[0044] После подтверждения запроса на перемещение, контроллер 103 взаимодействует с контроллером 106 тягового двигателя, например, прямо или косвенно, например, через такую шину, как шина 110 CAN, если используется, для перемещения вперед подъемника-загрузчика 10 на ограниченное расстояние. В зависимости от конкретного варианта осуществления, контроллер 103 может взаимодействовать с контроллером 106 тягового двигателя и, если требуется, с контроллером 112 поворота движением, для перемещения вперед подъемника-загрузчика 10 на разрешенное расстояние. Альтернативно контроллер 103 может взаимодействовать с контроллером 106 тягового двигателя и, если требуется, с контроллером 112 управления поворотом, для перемещения вперед подъемника-загрузчика 10 в течение некоторого периода времени в ответ на обнаружение и постоянное задействование органа управления движением на устройстве 70 дистанционного управления. В качестве еще одного иллюстративного примера, подъемник-загрузчик 10 можно настроить на перемещение, пока получает управляющий сигнал на перемещение. Кроме того, далее, контроллер 103 можно настроить на «истечение времени» и остановку перемещения подъемника-загрузчика 10 на основании предварительно определенного события, такого как превышение предварительно определенного интервала времени или дистанции перемещения, вне зависимости от определения продолжающегося задействования соответствующего органа управления на устройстве дистанционного управления 70.
[0045] Устройство 70 дистанционного управления также можно использовать для передачи сигнала второго типа, такого как «сигнал остановки», определяющего, что подъемник-загрузчик 10 должен тормозиться и/или иным образом остановиться. Сигнал второго типа также может подразумеваться, например, после выполнения команды «перемещение», например, после того, как подъемник-загрузчик 10 прошел предварительно заданное расстояние, перемещался в течение предварительно определенного времени и т.п., под дистанционным управлением в ответ на команду на перемещение. Если контроллер 103 определяет, что принимаемый по беспроводной связи сигнал - это сигнал остановки, контроллер 103 посылает сигнал на контроллер 106 тягового двигателя, контроллер 116 тормоза и/или на другие компоненты подъемника-загрузчика для приведения подъемника-загрузчика 10 в неподвижное состояние. В качестве альтернативы сигналу остановки, сигнал второго типа может включать «сигнал движения накатом» или «сигнал управляемого замедления», означающий, что подъемник-загрузчик 10 должен двигаться накатом, возможно замедляясь до остановки (неподвижного состояния).
[0046] Время, которое требуется для полного приведения подъемника-загрузчика 10 в неподвижное состояние, может варьироваться в зависимости, например, от предполагавшегося применения, окружающих условий, возможностей конкретного подъемника-загрузчика 10, груза подъемника-загрузчика 10 и прочих подобных факторов. Например, после выполнения соответствующего перемещения толчками, может понадобиться разрешить подъемнику-загрузчику 10 «движение накатом» на некоторое расстояние до перехода в неподвижное состояние, чтобы подъемник-загрузчик 10 останавливался медленно. Этого можно достигнуть, используя рекуперативное торможение для замедления подъемника-загрузчика 10 до остановки. В качестве альтернативы, можно применять операцию торможения после предварительно определенного времени задержки, чтобы разрешить предварительно определенную дистанцию дополнительного перемещения подъемника-загрузчика 10 после начала выполнения операции торможения. Может также понадобиться остановить подъемник-загрузчик 10 относительно быстрее, например, если на пути движения подъемника-загрузчика 10 обнаружен объект, либо если требуется немедленная остановка после успешной операции перемещения толчками. Например, контроллер может приложить предварительно определенный вращающий момент для операции торможения. В этих условиях контроллер 103 может передать 116 контролеру тормоза указание применить тормоз 117 для остановки подъемника-загрузчика 10.
Зоны обнаружения погрузочно-разгрузочного транспортного средства
[0047] Как показано на фиг.3, в соответствии с различными аспектами настоящего изобретения, один или несколько датчиков 76 обнаружения препятствий настроены так, чтобы они совместно позволяли обнаруживать объекты/препятствия в нескольких «зонах обнаружения». В этой связи, контроллер 103 можно настроить на изменение одного или нескольких рабочих параметров подъемника-загрузчика 10 в ответ на обнаружения препятствия в одной или нескольких зонах обнаружения, как более подробно описано далее. Управление подъемника-загрузчика 10, использующее зоны обнаружения, можно выполнить, когда оператор едет на подъемнике-загрузчике 10/управляет им. Одна или несколько зон обнаружения также может быть отключена или иным образом проигнорирована контроллером 103, когда оператор едет на подъемнике-загрузчике 10/управляет им, например, чтобы дать возможность оператору работать с подъемником-загрузчиком 10 в стесненном пространстве. Управление подъемника-загрузчика 10, использующее зоны обнаружения можно также интегрировать с дополнительным пультом дистанционного управления, как изложено и более подробно описано в данном документе.
[0048] Хотя для пояснения рассуждений настоящего документа показаны шесть датчиков 76 обнаружения препятствий, можно использовать любое количество датчиков 76 обнаружения препятствий. Количество датчиков 76 обнаружения препятствий, скорее всего, будет различно, в зависимости от технических решений, используемых для реализации датчика, размера и/или диапазона зон обнаружения, количества зон обнаружения и/или иных факторов.
[0049] В иллюстративном примере первая зона 78А обнаружения расположена вблизи приводного узла 14 подъемника-загрузчика 10. Вторая зона 78В обнаружения определена, как прилегающая к первой зоне 78А обнаружения, и представляется в целом опоясывающей первую зону 78А обнаружения. Третья область также концептуально определена, как вся область вне первой и второй зон 78А, 78В обнаружения. Хотя вторая зона 78В обнаружения иллюстрируется как по существу опоясывающая первую зону 78А обнаружения, можно реализовывать и любые иные практические расстановки, которые определяют первую и вторую зоны 78А, 78В обнаружения. Например, все или определенные части зон 78А, 78В обнаружения могут пересекаться, перекрываться или быть взаимоисключающими. Более того, конкретная форма зон 78А, 78В обнаружения может изменяться. Кроме того, можно определить любое количество зон обнаружения, другие примеры которых описаны более подробно в данном документе.
[0050] Более того, зоны обнаружения не обязательно окружают весь подъемник-загрузчик 10. Наоборот, форма зон обнаружения может зависеть от конкретной реализации, как более подробно описано в данном документе. Например, если зоны 78А, 78В обнаружения должны использоваться для управления скоростью, пока подъемник-загрузчик 10 движется без оператора на нем, под дистанционным управлением в первом направлении приводным узлом вперед (вилами назад), то зоны 78А, 78В обнаружения можно ориентировать, по меньшей мере, вперед по направлению движения подъемника-загрузчика 10. Однако зоны обнаружения также могут включать в себя другие области, например, прилегающие к боковым сторонам подъемника-загрузчика 10.
[0051] В соответствии с различными аспектами настоящего изобретения, первая зона 78А обнаружения может дополнительно определять «зону остановки». Соответственно, вторая зона 78В обнаружения может дополнительно определять «первую зону скорости». При данном расположении, если объект, например, определенный тип препятствия, обнаруживается в пределах первой зоны 78А обнаружения, а погрузочно-разгрузочное транспортное средство, например, подъемник-загрузчик 10, перемещается под дистанционным управлением в ответ на запрос на перемещение, то контроллер 103 может быть настроен на выполнение такого действия, как «действие остановки», чтобы заставить подъемник-загрузчик 10 остановиться. В этой связи, перемещение подъемника-загрузчика 10 может продолжиться, когда препятствие устранено, или может потребоваться второй, последующий запрос на перемещение от устройства 70 дистанционного управления для повторного начала перемещения подъемник-загрузчик 10, когда препятствие устранено.
[0052] Если запрос на перемещение получен от устройства 70 дистанционного управления, когда подъемник-загрузчик находится в неподвижном состоянии, и объект обнаруживается в пределах первой зоны обнаружения 78А, то контроллер 103 может отклонить запрос на перемещение и оставить подъемник-загрузчик в неподвижном состоянии, пока препятствие не будет убрано из зоны остановки.
[0053] Если объект/препятствие обнаруживается в пределах второй зоны 78 В обнаружения, а подъемник-загрузчик 10 перемещается под дистанционным управлением в ответ на запрос на перемещение, то контроллер 103 может быть настроен на выполнение иного действия. Например, контроллер 103 может выполнить первое действие по снижению скорости для уменьшения скорости подъемника-загрузчика 10 до первой заранее определенной скорости, например, когда подъемник-загрузчик 10 перемещается со скоростью большей, чем первая заранее определенная скорость.
[0054] Так, предположим, что подъемник-загрузчик 10 перемещается в ответ на выполнение запроса на перемещение от устройства дистанционного управления со скоростью V2, как установлено совокупностью рабочих условий, если датчики 76 обнаружения препятствий не обнаруживают препятствие в любой из зон обнаружения. Если подъемник-загрузчик первоначально находится в неподвижном состоянии, подъемник-загрузчик можно ускорить до скорости V2. Обнаружение препятствий в пределах второй зоны 78В обнаружения (но не первой зоны 78А обнаружения) может заставить подъемник-загрузчик 10, например, посредством контроллера 103, изменить по меньшей мере один рабочий параметр, например, замедлить подъемник-загрузчик 10 до первой заранее определенной скорости V1, которая ниже скорости V2. То есть, V1<V2. Как только препятствие устранено из второй зоны 78В обнаружения, подъемник-загрузчик 10 снова может перейти на скорость V2, либо подъемник-загрузчик 10 может поддерживать скорость V1, пока подъемник-загрузчик не остановится, а устройство 70 дистанционного управления не инициирует следующий запрос на перемещение. Более того, если обнаруженный объект впоследствии обнаруживается в пределах первой зоны 78А обнаружения, подъемник-загрузчик 10 будет остановлен, как описано более подробно в данном документе.
[0055] Предположим в качестве иллюстративного примера, что подъемник-загрузчик 10 настроен на перемещение со скоростью приблизительно 2,5 мили в час (миль/ч) (4 километра в час (км/ч)) на ограниченное, предварительно определенное расстояние, если подъемник-загрузчик 10 перемещается без наличия оператора на нем и находится под беспроводным дистанционным управлением в ответ на запрос на перемещение от соответствующего устройства 70 дистанционного управления, до тех пор, пока ни одного объекта не обнаружено в определенной зоне обнаружения. Если препятствие обнаружено во второй зоне 78 В обнаружения, контроллер 103 может скорректировать скорость подъемника-загрузчика 10 до скорости примерно 1,5 миль/ч (2,4 км/ч) или какой-либо иной скорости менее 2,5 миль в час (миль/ч) (4 километра в час (км/ч)). Если препятствие обнаружено в первой зоне обнаружения 78А, то контроллер 103 останавливает подъемник-загрузчик 10.
[0056] Пример выше предполагает, что подъемник-загрузчик 10 перемещается под беспроводным дистанционным управлением в ответ на действительный сигнал, полученный от передатчика устройства 70 ДУ. В этой связи, датчики 76 обнаружения препятствий можно использовать для корректировки рабочих условий незанятого подъемника-загрузчика 10. Однако датчики 76 обнаружения препятствий и соответствующая логика контроллера можно также использовать, когда оператор ведет подъемник-загрузчик 10, например, стоя на платформе или на ином подходящем месте подъемника-загрузчика 10. Таким образом, в соответствии с различными аспектами настоящего изобретения, контроллер 103 может остановить подъемник-загрузчик 10 или отказаться от перемещения подъемника-загрузчика 10, если объект обнаруживается в пределах зоны 78А остановки, вне зависимости от того, управляется ли подъемник-загрузчик оператором или работает автоматически в ответ на получение соответствующим образом переданного по беспроводной связи запроса на перемещение. Соответственно, в зависимости от конкретного исполнения, возможность управления скоростью/ее ограничения контроллера 103, например, в ответ на обнаружение объекта во второй зоне 78 В обнаружения, но не в первой зоне 78А обнаружения, можно осуществить вне зависимости от того, перемещается ли подъемник-загрузчик 10 в ответ на получение соответствующим образом переданного по беспроводной связи запроса на перемещение, или оттого, едет ли оператор на подъемнике-загрузчике 10, управляя им.
[0057] Однако в соответствии с различными аспектами настоящего изобретения, и как кратко отмечено выше, могут быть ситуации, когда желательно отключить одну или несколько зон обнаружения, когда подъемником-загрузчиком 10 управляет оператор, например, может потребоваться игнорировать сигнал/отключить датчики 76 обнаружения препятствий/логику контроллера, пока оператор управляет подъемником-загрузчиком 10, вне зависимости от внешних условий. В качестве дополнительного примера, может потребоваться игнорировать сигнал/отключить датчики 76 обнаружения препятствий/логику контроллера, пока оператор управляет подъемником-загрузчиком 10, чтобы позволить оператору управлять подъемником-загрузчиком 10 в стесненных условиях, например, для управления в ограниченном пространстве, объезжать углы и т.п., которые в противном случае могут включить одну или несколько зон обнаружения. Итак, задействование логики контроллера, например, в контроллере 103 для использования обнаружения объектов в зонах обнаружения, чтобы помочь в управлении подъемника-загрузчика 10, когда подъемник-загрузчик 10 занят оператором, в соответствии с различными аспектами настоящего изобретения, может управляться вручную, управляться программно или иным образом управления по выбору.
[0058] Как показано на фиг. 4, в соответствии с дальнейшими аспектами настоящего изобретения, один или несколько датчиков 76 обнаружения препятствий можно реализовать посредством ультразвуковой технологии или иного подходящей бесконтактной технологии, которые способны измерять расстояние и/или определять положение. Таким образом, расстояние до объекта можно измерить, и/или можно провести определение так, чтобы установить, находится ли обнаруженный объект в пределах зоны 78А, 78В обнаружения, например, на основании расстояния от объекта до подъемника-загрузчика 10. В качестве примера, датчик 76 обнаружения препятствий может быть реализован посредством ультразвукового датчика или преобразователя, который выдает сигнал «свист» такой, как сигнал высокой частоты, генерируемый пьезоэлементом. Затем ультразвуковой датчик 76 находится в покое и ждет сигнала отклика. В этой связи, можно определить информацию о времени прохождения и использовать ее для определения каждой зоны. Таким образом, контроллер, например, контроллер 103 или контроллер, конкретно связанный с датчиками 76 обнаружения препятствий, может использовать программное обеспечение, которое следит за информацией о времени прохождения, чтобы определить, находиться ли объект в зоне обнаружения.
[0059] В соответствии с другими аспектами настоящего изобретения, несколько датчиков 76 обнаружения препятствий могут работать совместно для установления обнаружения объекта. Например, первый ультразвуковой датчик может посылать сигнал звукового импульса (проверки отклика). Первый ультразвуковой датчик и один или несколько дополнительных ультразвуковых датчиков могут затем ожидать отклика. Таким образом, контроллер 103 может использовать различие в идентификации существования объекта в пределах одной или нескольких зон обнаружения.
[0060] Как показано на фиг. 5, реализация многоскоростного управления по зонам проиллюстрирована в соответствии с еще другими аспектами настоящего изобретения. Как показано, обеспечиваются три зоны обнаружения. Если объект, такой как препятствие, обнаруживается в первой зоне 78А обнаружения, а подъемник-загрузчик 10 перемещается в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение передатчиком устройства 70 ДУ, то можно выполнить первое действие, например, подъемник-загрузчик 10 можно заставить остановиться, как более подробно описано в данном документе. Если объект, такой как препятствие, обнаруживается во второй зоне 78В обнаружения, а подъемник-загрузчик 10 перемещается в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение передатчиком устройства 70 ДУ, то можно выполнить второе действие, например, скорость транспортного средства можно ограничить, снизить и т.п. Таким образом, вторая зона 78 В обнаружения может далее определять первую зону скорости. Например, скорость подъемника-загрузчика 10 можно уменьшить до первой относительно низкой скорости и/или ограничить до нее, например, приблизительно 1,5 миль/ч (2,4 км/ч).
[0061] Если объект, такой как препятствие, обнаруживается в третьей зоне 78С обнаружения, а подъемник-загрузчик 10 перемещается в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение передатчиком устройства 70 ДУ, то можно выполнить третье действие, например, подъемник-загрузчик 10 можно замедлить или иным образом ограничить до второй скорости, например, приблизительно 2,5 миль/ч (4 км/ч). Таким образом, третья зона обнаружения может далее определять вторую зону скорости. Если не обнаружено препятствий в первой, второй и третьей зонах 78А, 78В, 78С обнаружения, то на подъемник-загрузчик 10 можно дистанционно отправить команду на перемещение на ограниченное расстояние, например, на скорости, превышающем скорость, когда препятствие находится в третьей зоне обнаружения, например, со скоростью приблизительно 4 мили/ч (6,2 км/ч).
[0062] Как далее показано на фиг. 5, зоны обнаружения можно определять различными схемами относительно подъемника-загрузчика 10. Кроме того, на фиг. 5, используется семиэлементный датчик 76 обнаружения препятствий, однако может быть обеспечено любое количество датчиков, в зависимости от используемого технологического решения и/или реализуемых функций. В качестве иллюстрации, но не в качестве ограничения, семиэлементный датчик 76 обнаружения препятствий можно приблизительно расположить по середине, например, на бампере или на другом подходящем месте на подъемнике-загрузчике 10. На примере подъемника-загрузчика 10, третья зона 78С может пролегать приблизительно на 6,5 футов (2 метра) вперед от приводного узла 14 подъемника-загрузчика 10.
[0063] В соответствии с различными аспектами настоящего изобретения, можно реализовать любое количество зон обнаружения любой формы. Например, в зависимости от требуемых эксплуатационных параметров подъемника-загрузчика, можно определить множество небольших зон при различных координатах положения относительно подъемника-загрузчика 10. Аналогично, в зависимости от желаемых эксплуатационных параметров подъемника-загрузчика, можно определить несколько больших зон обнаружения. В качестве иллюстративного примера, в память контроллера можно внести таблицу. Если скорость перемещения во время работы под дистанционным управлением перемещением является контролируемым рабочим параметром, то в таблице можно сопоставить скорость перемещения с зонами обнаружения, определяемыми расстоянием, диапазоном, координатами положения или некоторыми другими измеряемыми величинами. Если подъемник-загрузчик 10 перемещается в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение передатчиком устройства 70, и датчик обнаружения препятствий обнаруживает объект, то расстояние до такого обнаруженного объекта можно использовать в качестве «ключа» для поиска соответствующей скорости перемещения в таблице. Скорость перемещения, полученную из таблицы, может использовать контроллер 103 для регулирования подъемника-загрузчика 10, например, для его замедления и т.п.
[0064] Области каждой зоны обнаружения можно выбирать, например, на основании таких факторов, как требуемая скорость подъемника-загрузчика, когда подъемник-загрузчик 10 перемещается в ответ на действительный полученный запрос на перемещение от устройства 70 дистанционного управления, требуемый тормозной путь, ожидаемый груз для транспортировки на подъемнике-загрузчике 10, требуется ли определенное значение движения накатом, необходимое для стабильности груза, время реакции транспортного средства и т.п. Более того, такие факторы, как диапазон каждой желаемой зоны обнаружения и т.п., можно учитывать, чтобы определить требуемое количество датчиков 76 обнаружения препятствий. В этой связи, такая информация может быть статической или динамической, например, на основании опыта оператора, загрузки транспортного средства, характера груза, окружающих условий и т.д. Также предполагается, что контроллер 103 может генерировать сигнал предупреждения или тревоги, если объект или человек обнаруживается в зоне обнаружения.
[0065] В качестве иллюстративного примера, в конфигурации с несколькими зонами обнаружения, например, тремя зонами обнаружения, семь либо более детекторов объектов, например, ультразвуковых датчиков или лазерных датчиков, можно использовать, чтобы обеспечить диапазон охвата, требующийся для соответствующего применения. В этой связи, детектор(ы) может (могут) иметь возможность смотреть вперед по направлению движения подъемника-загрузчика 10 на достаточное расстояние, чтобы дать время на соответствующую реакцию, например, на замедление. В этой связи, по меньшей мере, один датчик может иметь возможность смотреть на несколько метров вперед по направлению движения подъемника-загрузчика 10.
[0066] В соответствии с различными аспектами настоящего изобретения, несколько зон обнаружения и скорости позволяют использовать относительно большую максимальную скорость движения вперед при работе в ответ на полученные по беспроводной связи команды на перемещение. Такое расположение может предотвратить излишние ранние остановки транспортного средства путем обеспечения одной или нескольких промежуточных зон, где подъемник-загрузчика 10 замедляется до решения о переходе к полной остановке.
[0067] В соответствии с дальнейшими аспектами настоящего изобретения, использование нескольких зон обнаружения позволяет реализовать систему, которая предоставляет соответствующему оператору возможность лучше выравнивать подъемник-загрузчик 10 с захватываемым товаром во время операций по комплектации. Например, оператор может расположить подъемник-загрузчика 10 так, что он не был по центру по проходу склада. В этом примере, когда подъемник-загрузчик 10 подается вперед толчками, вторая зона 78В обнаружения может первоначально обнаружить препятствие, такое как комплектовочный контейнер или складскую стойку. В ответ на обнаружение стойки подъемник-загрузчик 10 замедлится. Если стойка обнаружена в первой зоне 78А обнаружения, то подъемник-загрузчик 10 будет переходить к неподвижному состоянию, даже если подъемник-загрузчик 10 не был перемещен толчками на все запрограммированное расстояние перемещения толчками. Аналогичные излишние замедления или остановки могут также возникать в перегруженных и/или заставленных проходах.
[0068] В соответствии с различными аспектами настоящего изобретения, подъемник-загрузчик 10 может сформировать рабочие параметры скорости и торможения, основываясь на информации, полученной от датчиков 76 обнаружения препятствий. Более того, логику, реализуемую подъемником-загрузчиком 10 в ответ на зоны обнаружения, можно менять или варьировать в зависимости от требуемого применения. В качестве нескольких иллюстративных примеров, границы каждой зоны в конфигурации с несколькими зона можно программно (и/или повторным программированием) ввести в контроллер, например, запрограммировать прошивкой. Принимая во внимание определенные зоны, один или несколько рабочих параметров можно связать с каждой зоной. Установленные рабочие параметры могут определять состояние, например, максимально допустимую скорость перемещения, действие, например, торможение, движение накатом или иной переход к управляемой остановке и т.д. Действие также может быть действием предотвращения столкновений. Например, действие может включать корректировку угла поворота или курса движения подъемника-загрузчика 10, как более подробно будет описано далее.
[0069] В соответствии с дополнительным вариантом осуществления настоящего изобретения, один или несколько датчиков обнаружения препятствий, таких как датчики обнаружения 76А, 76В препятствий, показанные на Фиг. 6 и 8, можно использовать для восприятия или обнаружения объекта в первой, второй и третьей зонах обнаружения перед подъемником-загрузчиком 10, когда подъемник-загрузчик 10 перемещается в ответ на запрос по беспроводной связи на перемещение, принятый от передатчика устройства 70 дистанционного управления. Контроллер 103 или другое сенсорное обрабатывающее устройство также может генерировать сигнал обнаруженного объекта и, если требуется, сигнал расстояния в ответ на обнаружение/обнаружение объекта перед подъемником-загрузчиком 10. В качестве иллюстративного примера, дополнительным входом (входным сигналом) 104 в контроллер 103 может быть сигнал веса, генерируемый датчиком LS нагрузки, как показано на фиг. 7 и 8, который реагирует на сумму веса вил 16 и любого груза на вилах 16. Датчик LS нагрузки схематически показан на фиг. 7 и 8 рядом с вилами 16, но может быть встроен в гидравлическую систему для осуществления подъема вил 16. Вычитая вес вил 16 (известная постоянная величина) из общего веса, определенного сигналом веса, контроллер 103 определяет вес груза на вилах. Используя определенный вес груза, и если объект обнаружен в одной из первой, второй и третьей зон обнаружения, в качестве входных данных в таблице поиска или в соответствующих уравнениях, контроллер 103 генерирует соответствующий сигнал остановки транспортного средства или максимально допустимой скорости.
[0070] Значения, определяющие сигналы остановки транспортного средства и максимально допустимой скорости, можно определить экспериментально и хранить в поисковой таблице, составляемой в реальном времени на основании заранее определенной формулы и т.п. В показанном варианте осуществления контроллер 103 определяет вес груза на вилах 16, и было ли уже обнаружено препятствие в одной из первой, второй и третьей зон обнаружения и, используя поисковую таблицу, дает команду остановки или определяет максимально допустимую скорость подъемника-загрузчика 10 и генерирует соответствующий сигнал максимально допустимой скорости для подъемника-загрузчика 10.
[0071] В качестве примера, если на вилах 16 нет груза и нет объектов, детектируемых датчиками 76А, 76В обнаружения препятствий в любой из первой, второй и третьей зон обнаружения, контроллер 103 позволяет использовать подъемник-загрузчик 10 на любой скорости, вплоть до максимальной скорости 4,5 мили в час, включая ее. Если объекты не обнаружены в одной из первой, второй и третьей зон обнаружения, можно настроить максимально допустимую скорость подъемника-загрузчика 10, например, на снижение по мере увеличения нагрузки на подъемник-загрузчик 10. В качестве иллюстрации, при нагрузке весом 8000 фунтов максимально допустимая скорость подъемника-загрузчика 10 может составлять 2,5 мили в час. Необходимо отметить, что в некоторых местах максимально допустимую скорость подъемника-загрузчика 10, если на нем нет оператора, можно установить на предварительно заданный верхний предел, например, 3,5 мили в час. Следовательно, максимальная скорость транспортного средства, если на нем нет оператора, может устанавливаться, например, контроллером 103, на данную максимально допустимую скорость.
[0072] Для любого веса груза на вилах 16, если объект обнаружен в первой зоне обнаружения, контроллер 103 генерирует «сигнал остановки», определяющий, что подъемник-загрузчик 10 переходит к по существу немедленной остановке. Для любого данного веса груза, максимально допустимая скорость подъемника-загрузчика 10 тем постепенно больше, чем дальше объект от подъемника-загрузчика 10. К тому же, для любого данного веса груза, максимально допустимая скорость подъемника-загрузчика 10 меньше, если объект обнаруживается во второй зоне обнаружения по сравнению с тем, когда объект обнаруживается в третьей зоне обнаружения. Максимально допустимые скорости транспортного средства для второй и третьей зон обнаружения определяются для каждого веса груза так, чтобы скорость подъемника-загрузчика 10 можно было уменьшить управляемым способом по мере того, как подъемник-загрузчик 10 продолжает двигаться в направлении объекта, так чтобы подъемник-загрузчик 10 можно было, в конечном счете, безопасно остановить до достижения подъемником-загрузчиком места, где расположен объект. Эти скорости можно определить экспериментально, исходя из формул или их комбинаций, и они могут варьироваться в зависимости от типа транспортного средства, его габаритов и тормозных характеристик подъемника-загрузчика.
[0073] В качестве иллюстративного примера, предположим, что вес груза на вилах 16 составляет 1500 фунтов, и обеспечены три зоны обнаружения, в том числе первая зона обнаружения - ближайшая к подъемнику-загрузчику, последующая вторая зона обнаружения и третья зона обнаружения - самая удаленная от подъемника-загрузчика. Если обнаруженный объект расположен на расстоянии в пределах третьей зоны обнаружения, то максимально допустимая скорость транспортного средства можно установить до такой скорости, как 3 мили в час. Следовательно, если подъемник-загрузчик 10 перемещается со скоростью более 3 миль в час, когда объект обнаруживается, контроллер 103 осуществляет снижение скорости так, чтобы скорость транспортного средства снизилась до 3,0 миль в час.
[0074] Если вес груза на подъемнике-загрузчике 10 остается равным 1500 фунтам, и если обнаруженный объект расположен на расстоянии от подъемника-загрузчика 10 в пределах второй зоны обнаружения, то максимально допустимой скоростью транспортного средства может быть, например, 2 мили в час. Следовательно, если подъемник-загрузчик 10 перемещается со скоростью более 2 миль в час, когда объект обнаруживается во второй зоне обнаружения, контроллер 103 осуществляет снижение скорости так, чтобы скорость транспортного средства снизилась до 2 миль в час.
[0075] Придерживаясь примера выше, если вес груза на подъемнике-загрузчике 10 равен 1500 фунтов, и объект обнаружен в первой зоне обнаружения, то сигнал остановки может быть сгенерирован контроллером 103 для осуществления остановки подъемника-загрузчика 10.
[0076] Датчики обнаружения препятствий могут содержать ультразвуковые преобразователи. Известно, что в ультразвуковых преобразователях наблюдается такое явление, как «переотражение» преобразователя. По существу, «переотражение» - это склонность преобразователя к продолжению вибрации и передаче ультразвуковых сигналов после того, как управляющий сигнал, который использовался для инициирования передаваемого сигнала, прекратился. Этот сигнал «переотражения» довольно быстро уменьшается по амплитуде, но в то время, пока он снижается до уровня ниже уровня порога обнаружения, каждый датчик обнаружения препятствий может отреагировать, игнорируя такие сигналы «переотражения», если эти сигналы выше опорного уровня, связанного с уровнем ожидающим сигнала датчика. Как результат, датчик может спутать объект с сигналом «переотражения» и, следовательно, не идентифицировать объект в соответствующей зоне обнаружения. Общепринятым методом решения этой проблемы является гашение всех отраженных сигналов, генерируемых датчиками обнаружения препятствий в течение заранее заданного периода времени после начала передачи. Заранее заданное время, определенное на основе различных факторов, включающих в себя тип используемого преобразователя, но в течение этого заранее заданного времени не обнаружить действительных откликов. Если датчики обнаружения препятствий расположены около передней части 10А подъемника-загрузчика 10, см. датчики 76А обнаружения препятствий на Фиг. 7, и если используется метод гашения, это приведет к «мертвой» зоне или «недетектируемой» зоне DZ, образовавшейся непосредственно перед подъемником-загрузчиком 10. Таким образом, если объект О находится очень близко к передней части подъемника-загрузчика 10, например, в 10 мм или менее, а датчики 76А обнаружения препятствий расположены на передней части подъемника-загрузчика 10, см. Фиг. 7, то объект О может не обнаруживаться.
[0077] В варианте осуществления изобретения, показанном на фиг.6 и 8, первый и второй датчики 76А и 76В обнаружения препятствий, соответственно, расположены на расстоянии друг от друга вдоль продольной оси La подъемника-загрузчика 10, см. фиг. 8. Первые датчики 76А обнаружения препятствий расположены на передней части 10А подъемника-загрузчика 10 и способны обнаружить объекты, расположенные, например, в первой, второй и/или третьей зоне обнаружения. Таким образом, чтобы гарантировать обнаружение объектов О, находящихся в недектируемой зоне DZ, которая может быть присуща первым датчикам 76А обнаружения препятствий, вторые датчики 76В обнаружения препятствий располагаются на подъемнике-загрузчике 10, отстоя на какое-то расстояние за первыми датчиками 76А, т.е. в направлении от передней части 10А подъемника-загрузчика 10, как лучше всего показано на Фиг. 8. В этой связи, вторые датчики 76В функционируют, по меньшей мере, для обнаружения объектов в мертвой зоне DZ на фиг.7.
Корректировка поворота
[0078] Когда подъемник-загрузчик 10 движется в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение передатчиком устройства 70, например, когда никто не находится на подъемнике-загрузчике 10, как более подробно описано здесь, возможно, что подъемник-загрузчик 10 столкнется с препятствиями, которые не потребуют приведения подъемника-загрузчика 10 в неподвижное состояние. Вместо этого можно провести корректирующий маневр поворота таким образом, что подъемник-загрузчик 10 продолжит движение вперед на соответствующее ограниченное расстояние без необходимости вмешательства оператора.
[0079] В соответствии с аспектами настоящего изобретения, коррекция поворота позволяет подъемнику-загрузчику 10 автоматически совершать поворот для увода поворотом от объектов, которые обнаружены, как находящиеся в общей области передней части подъемника-загрузчика 10. Возможность корректировки поворота позволяет, например, подъемнику-загрузчику 10, который может перемещаться в ответ на полученный по беспроводной связи запрос на перемещение от передатчика устройства 70, оставаться в общем в центре прохода в складском пространстве, когда подъемник-загрузчик 10 перемещается по проходу, например, возможно, что подъемник-загрузчик 10 может иметь определенное отклонение по углу поворота из-за калибровки (настройки) поворота, неровностей пола или любого числа внешних факторов. Однако в соответствии с различными аспектами настоящего изобретения подъемник-загрузчик 10, перемещающийся в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение от передатчика устройства 70, может осуществлять корректировку поворота, например, чтобы держаться подальше или иным образом избегать соударения со стенами и стойками, с другими подъемниками-загрузчиками, людьми, коробками и другими препятствиями и т.п., тем самым освобождая оператора от необходимости периодически снова подниматься на подъемник-загрузчик 10 и поворачивать подъемник-загрузчик 10 вручную к середине прохода или другому желаемому положению и направлению.
[0080] В соответствии с различными аспектами настоящего изобретения, контроллер 103 собирает данные от различных датчиков 76, 76А, 76В, например, которые обеспечивают картину рельефа/окружающего пространства перед подъемником-загрузчиком 10, как будет более подробно описано в данном документе. Контроллер 103 затем использует данные, собранные от датчиков, чтобы определить, следует ли осуществлять корректирующие маневры поворота, как более подробно описано здесь. В этой связи, корректировку поворота можно реализовать в дополнение к, вместо, и/или в комбинации с другими методами избегания столкновения, что более подробно описано в данном документе. Таким образом, в качестве иллюстрации, но не ограничивая этим, корректировку поворота можно использоваться в сочетании с несколькими зонами скорости, зонами обнаружения остановки, зонами скорости, зависящими от веса и т.д.
[0081] В качестве еще одного примера, компоненты обнаружения объектов подъемника-загрузчика 10 могут также осуществлять предупреждения и/или заставить подъемник-загрузчик 10 остановиться, уменьшить или иным образом ограничить максимальную скорость перемещения подъемника-загрузчика 10 и т.д. Более того, подъемник-загрузчик 10 может выдать первое предупреждение, если подъемник-загрузчик пытается автоматически провести корректирующий маневр поворота, и второе предупреждение или сигнал, если подъемник-загрузчик 10 снижает скорость и/или останавливается, реагируя на объект в соответствующей зоне обнаружения, если такие функции реализуются в сочетании с корректировкой поворота.
[0082] В этой связи, как использовано в данном документе, термин «зона поворота бампера» будет использоваться для различия зоны, используемой для корректировки поворота, от «зоны обнаружения», которая используется для ограничения максимальной скорости, остановки подъемника-загрузчика 10 и т.п., как описано более подробно выше.
[0083] В иллюстративном примере, два входа данных зоны поворота бампера предусмотрены к контроллеру 103, чтобы различать левую и правую ориентации относительно подъемника-загрузчика 10. Однако, в зависимости от технологии датчиков и способа, которым становятся доступными данные датчиков, может потребоваться один или несколько входов в контроллер 103. В качестве иллюстрации, но не ограничиваясь этим, подъемник-загрузчик 10 может быть оснащен одним или несколькими устройством (устройствами) 76, 76А, 76В датчика(ов) обнаружения, которые в совокупности обеспечивают первую зону поворота бампера и вторую зону поворота бампера, которые находятся вблизи от подъемника-загрузчика 10. например, первая зона поворота бампера может располагаться слева и в целом вперед от направления перемещения вперед подъемника-загрузчика 10, с левой стороны подъемника-загрузчика 10 и т.д. Аналогично, вторая зона поворота бампера может располагаться справа и в целом вперед от направления перемещения вперед подъемника-загрузчика 10, с правой стороны подъемника-загрузчика 10 и т.д. В этой связи, первая и вторая зоны поворота бампера подъемника-загрузчика 10 могут быть использованы для осуществления корректировки поворота, которая может включать в себя угол поворота и составляющие направления поворота. В этой иллюстративной конфигурации первая и вторая зоны поворота бампера могут быть взаимоисключающими, или части первой и второй зон поворота бампера могут перекрываться, таким образом по существу обеспечивая третью зону поворота бампера определяемую областью перекрытия первой и второй зонами поворота бампера.
[0084] Кроме того, первая и вторая зоны поворота бампера могут значительно перекрываться с, частично с, или не перекрываться с одной или несколькими зонами обнаружения, используемыми для других методов, таких как управление скоростью, торможение из-за препятствия и остановка подъемника-загрузчика 10 и т.д. Например, величина зон поворота бампера может быть аналогична или отличаться от величины одной или более зон обнаружения, если управление максимально допустимой скоростью или другие функции также реализованы вместе с корректировкой поворота, как более подробно описано в данном документе.
[0085] Более того, входные данные по обнаружению, предназначенные для контроллера 103, могут быть получены от множества подобных типов датчиков или с помощью сочетания различных сенсорных технологий, например ультразвуковых датчиков и/или датчиков лазерного сканера. В этой связи, различные датчики и/или типы технологий датчиков, например, лазерного сканирования и ультразвуковые, можно использовать в сочетании или вместе друг с другом, например, использовать один или несколько датчиков или технологий датчиков для одной или нескольких зон (обнаружения и/или зон поворота бампера, и использовать еще один или несколько датчиков или технологий датчиков для одной или нескольких различных зон (обнаружения и/или бампера). В качестве другого примера, два или несколько датчиков или технологий датчиков могут обеспечить дублирование, например, как отказобезопасный, резервный или подтверждающий набор данных.
[0086] В соответствии с дополнительными аспектами настоящего изобретения, контроллер 103 может быть настроен на обработку дополнительных данных, вне входных данных двух зон поворота бампера, примеры которых могут включать в себя угол обнаружения объекта и данные по расстоянию данных и т.п. Таким образом, способы, описанные здесь, не ограничены только двумя зонами поворота бампера.
[0087] Таким образом, корректировка управления поворота, в соответствии с аспектами настоящего изобретения, обеспечивает помощь оператору путем поддержания подъемника-загрузчика 10 вдали от стен, стоек, других транспортных средств или иных препятствий, когда подъемник-загрузчик 10 используется с устройством 70 беспроводного дистанционного управления.
[0088] В соответствии с различными аспектами настоящего изобретения, система управления на подъемнике-загрузчике 10 обеспечивает управление корректировкой поворота в соответствии с различными аспектами настоящего изобретения. На Фиг.9 изображен частичный схематический вид системы управления. В показанной системе первый ультразвуковой датчик 76′ используется для генерирования первой зоны 78′ обнаружения, которая также определяется в настоящем документе, как левая зона обнаружения. Соответственно, второй ультразвуковой датчик 76″ используется для формирования второй зоны 78″ обнаружения, которая также определяется в настоящем документе, как правая зона обнаружения. Кроме того, хотя проиллюстрированы только две ультразвуковых зоны обнаружения, следует понимать, что может быть реализовано любое количество зон обнаружения. Кроме того, далее, как более подробно описано в данном документе, реализованные зоны обнаружения могут перекрываться или определять дискретные, взаимно исключающие зоны.
[0089] Выход каждого ультразвукового датчика 76′, 76″ соединен с ультразвуковым контроллером 130, который используют, если он требуется в конкретном ультразвуковом технологическом решении, для обработки выходных данных от ультразвуковых датчиков 76′, 76″. Выход ультразвукового контроллера 130 подключен, например, в качестве входа в контроллер 103. Контроллер 103 может обрабатывать данные на выходах контроллера ультразвуковых датчиков 130 для осуществления управления скоростью, обхода препятствий или других функций, примеры которых приведены более подробно в данном документе.
[0090] Также показан датчик 76′″, который проиллюстрирован как сканирующий лазерный датчик для дальнейшей иллюстрации примеров конфигураций. В этом примере датчик 76′″ используют для генерирования первой зоны 132А поворота бампера, также обозначаемой как левая зона поворота бампера, и второй зоны 132В поворота бампера, также обозначаемой как правая зона поворота бампера. Например, сканирующий лазерный датчик 76′″ может перемещать лазерный луч в области перед подъемником-загрузчиком 10. В этой связи, можно использовать несколько лазерных систем, или можно формировать один или несколько лазерных лучей, которые могут перемещаться, например, для растрового сканирования одной или нескольких областей впереди подъемника-загрузчика 10. В этой связи, лазерный датчик может самостоятельно определять и сканировать левую и правую зоны поворота бампера, или контроллер 103 может вывести левую и правую зоны поворота бампера на основе растрового сканирования лазера(ов). Кроме того, дополнительно, могут быть использованы меняющиеся схемы сканирования, чтобы контроллер 103 мог определить, находиться ли детектируемое препятствие слева или справа от подъемника-загрузчика 10.
[0091] Как несколько дополнительных примеров, хотя лазерный сканер и проиллюстрирован в целях данного обсуждения, можно использовать и другие сенсорные технологии, примеры которых могут включать в себя ультразвуковые датчики, инфракрасные датчики и т.д. Например, ультразвуковые датчики, расположенные по бокам подъемника-загрузчика 10, могут определять левую и правую зоны 132А, 132В поворота бампера, а другие ультразвуковые датчики могут быть использованы для определения зон обнаружения, например, для ограничения скорости и т.д.
[0092] Как показано, выходной сигнал лазерного сканера 76′″ обеспечивает два входных сигнала 110 в контроллер 103. Первый сигнал определяет, обнаруживается ли объект в левой зоне поворота бампера. Соответственно, второй сигнал определяет, обнаруживается ли объект в правой зоне поворота бампера. В зависимости от используемого датчика и сенсорных технологий обработки, входные данные (сигналы) в контроллер 103, определяющие объект в зонах 132А, 132В поворота бампера, могут быть в других форматах. Как показано далее на еще одной иллюстрации, первая и вторая лазерные зоны 132А, 132В поворота бампера могут быть определены как ультразвуковыми датчиками, так и сканирующим лазером. В этом примере сканирующий лазер используется в качестве избыточной проверки для подтверждения того, что ультразвуковые датчики правильно детектировали объект либо в левой, либо в правой зоне 132А, 132В поворота бампера. В еще одном примере ультразвуковые датчики можно использовать для обнаружения объекта в левой или правой зоне 132А, 132В поворота бампера, а сканирующий лазер можно использовать для установления различия или иного вычисления местонахождения объекта, чтобы определить, обнаруживается ли объект в левой зоне поворота бампера или в правой зоне поворота бампера. Альтернативно могут осуществляться и другие схемы и конфигурации.
Алгоритм
[0093] В соответствии с различными аспектами настоящего изобретения, реализуется алгоритм корректировки поворота, например, посредством контроллера 103. Как показано на Фиг.10, алгоритм корректировки поворота включает в себя определение того, обнаруживается ли предупреждение зоны поворота бампера по условию 152. Предупреждающий сигнал зоны поворота бампера по условию 152 может включать в себя, например, обнаружение присутствия объекта в первой и/или второй зоне 132А, 132В поворота бампера. Если получен предупреждающий сигнал зоны поворота бампера, производится определение по условию 154, означает ли предупреждение зоны поворота бампера, что объект обнаруживается справа или слева от подъемника-загрузчика 10, например, находится ли обнаруживаемый объект в первой зоне 132 поворота бампера или второй зоне 132В поворота бампера. Например, кратко со ссылкой на предыдущую Фиг.9, лазерный сканирующий датчик 76″ может генерировать два выходных сигнала, первый выходной сигнал определяет, обнаруживается ли объект в первой (левой) зоне 132А поворота бампера, а второй сигнал определяет, обнаруживается ли объект во второй (правой) зоне 132В поворота бампера. Альтернативно, контроллер 103 может принимать необработанные данные лазерного сканера и обрабатывать/различать первую и вторую зоны 132А, 132В поворота бампера, используя заранее заданное картографирование.
[0094] Если предупреждающий сигнал зоны поворота бампера определяет, что объект обнаруживается в левой зоне 132А поворота бампера, то по условию 156 реализуется процедура корректировки поворота, которая включает в себя вычисление коррекции угла поворота, чтобы повернуть подъемник-загрузчик 10 вправо в соответствии с первым набором параметров. Только как иллюстрация, корректировка поворота вправо, реализованная по условию 156, может включать в себя поворот подъемника-загрузчика 10 вправо с углом поворота с направлением вправо. В этой связи, угол поворота с направление вправо может быть фиксированным или переменным. Например, контроллер 103 может отдать команду контроллеру 112 управления поворотом на постепенное увеличение до определенного требуемого угла поворота, например, 8-10 градусов вправо. При постепенном увеличении до фиксированного угла поворота, резких изменений углов рулевого(ых) колес(а) не происходит, что обеспечивает более плавную работу. Алгоритм накапливает пройденное расстояние при угле корректировки поворота, которое может быть функциональной зависимостью от того, как долго задействован соответствующий вход зоны поворота бампера.
[0095] В соответствии с различными аспектами настоящего изобретения, можно контролировать изменение угла поворота управляемого колеса для достижения, например, значительной фиксированной коррекции угла подъемника-загрузчика в качестве функциональной зависимости от накопленного расстояния. Расстояние перемещения, накопленное при выполнении маневра при корректировке поворота, может определяться на основании любого количества параметров. Например, расстояние, пройденное во время корректировки поворота, может включать расстояние, пройденное подъемником-загрузчиком 10 до момента, когда обнаруженный объект больше не находился в соответствующей левой обнаруживаемой зоне 132А поворота бампера. Накопленное расстояние перемещения может также/альтернативно включать в себя, например, перемещение до момента истечения времени, обнаружение другого объекта в любой из зон поворота бампера или зон обнаружения, превышения предварительно заданного максимального угла поворота и т.п.
[0096] После завершения корректировки поворота вправо по условию 156, например, маневрируя подъемником-загрузчиком 10 так, что ни один объект не обнаруживается в левой детектируемой зоне 132А поворота бампера по условию 158 осуществляется маневр компенсации поворота влево. Маневр компенсации поворота влево по условию 158 может включать в себя, например, выполнение противодействия уводу для корректировки направления движения подъемника-загрузчика 10 к соответствующему направлению курса движения. Например, маневр компенсации поворота влево может включать в себя поворота подъемника-загрузчика 10 на выбранный или иным образом определенный угол на расстоянии, которое является процентом от ранее накопленной длины перемещения расстояния. Угол поворота налево, использованный для маневра компенсации поворотом влево, может быть фиксированным или переменным и может быть таким же или отличным от угла поворота, использованного для реализации корректировки поворота вправо по условию 156.
[0097] Только в качестве иллюстрации, но не ограничивая этим, перемещение, использованное для маневра компенсации поворота влево по условию 158, может составлять приблизительно от одной четвертой до половины длины перемещения, накопленного при осуществлении корректировка поворота вправо по условию 156. Аналогично, угла поворота влево для осуществления маневра компенсации поворота влево может составлять приблизительно половину угла, использованного для осуществления корректировки поворота вправо по условию 156. Таким образом, предполагается, что угол поворота вправо составляет 8 градусов, а накопленная длина перемещения корректировки поворота равно 1 метру. В этом примере компенсация поворота влево может составлять приблизительно половину корректировки поворота вправо, или -4 градуса, и компенсация поворота влево будет происходить на длину перемещения, равном приблизительно 1/4 метра к 1/2 метра.
[0098] Конкретное расстояние и/или угол, связанный с маневром компенсации поворота влево по условию 158 можно выбрать, например, так, чтобы демпфировать «отскок» подъемника-загрузчика 10 по мере того, как подъемник-загрузчик 10 перемещается по своему курсу движения пути, чтобы скорректировать поворот увода от обнаруженного препятствия. В качестве иллюстрации, если поворот подъемника-загрузчика 10 корректируется на фиксированный градус на длине перемещения, контроллер 103 может быть способен определить, насколько был изменен соответствующий угол подъемника-загрузчика, и, поэтому, скорректировать маневр компенсации поворота влево по условию 158, чтобы осуществить обратную корректировку к исходному или иному соответствующему направлению. Таким образом, подъемник-загрузчик 10 может избежать «виляния» по проходу и, вместо этого, приблизиться к по существу прямолинейного направлению по центру прохода без утомительного повторного выставления положения вручную, требуемого от оператора подъемника-загрузчика. Кроме того, маневр компенсации поворота влево по условию 158 может изменяться, в зависимости от конкретных параметров, использованных для осуществления корректировки поворота вправо в 156.
[0099] Соответственно, если предупреждающий сигнал зоны поворота бампера определяет, что объект обнаруживается в правой зоне 132В поворота бампера, то по условию 160 реализуется процедура корректировки поворота, которая включает в себя вычисление коррекции угла поворота, чтобы повернуть подъемник-загрузчик 10 влево в соответствии со вторым набором параметров. В качестве неограничивающего примера, корректировка поворота влево, реализованная в 160, может включать в себя управление подъемником-загрузчиком 10 влево с углом поворота с направлением влево. В этой связи, маневр корректировки поворота влево по условию 160 может быть реализован аналогичным образом, как описано выше по условию 156, за исключением того, что корректировка осуществляется вправо по условию 156 и влево - по условию 160.
[0100] Аналогично, после завершения корректировки поворота влево по условию 160, например, маневрируя подъемником-загрузчиком 10 так, чтобы ни один объект не обнаруживался в правой зоне 132В поворота бампера, по условию 162 осуществляется маневр компенсации поворота вправо. Маневр компенсации поворота вправо по условию 162 может включать в себя, например, выполнение противодействия уводу для корректировки направления движения подъемника-загрузчика 10 к соответствующему направлению курса движения способом, аналогичным описанному в условии 158, за исключением того, что маневр компенсации поворота по условию 158 проводится влево, а маневр компенсации поворота по условию 162 - вправо.
[00101] После выполнения маневра компенсации поворота по условию 158 или 162, подъемник-загрузчик может вернуться к по существу прямолинейному направлению движения, например, 0 градусов - по условию 164, и процесс возвращается к началу для ожидания обнаружения другого объекта в любой из зон 132А, 132В поворота бампера.
[0102] Алгоритм можно дополнительно модифицировать для следования различным реализациям логики управления и/или конечных автоматов для облегчения учета различных ожидаемых условий, например, возможно, что второй объект переместится либо в зону 132А или 132В поворота бампера во время процесса выполнения маневра компенсации поворота. В этой связи, подъемник-загрузчик 10 может итеративно попытаться осуществить корректировку поворота вокруг второго объекта. В качестве еще одного иллюстративного примера, если объект(ы) одновременно обнаружены в левой и правой зонах 132А, 132В поворота бампера, контроллер 103 можно запрограммировать на удержание подъемника-загрузчика 10 на его текущем направлении (например, угол поворота ноль градусов) пока либо одна, либо более зон 132А, 132В поворота бампера не будут свободны, или пока связанные зоны обнаружения не заставят подъемник-загрузчик 10 перейти в состояние остановки.
[0103] В соответствии с дальнейшими аспектами настоящего изобретения, пользователь и/или сервисный представитель смогут иметь возможность подстройки реакции параметров алгоритма коррекции угла поворота, например, сервисный представитель может иметь доступ к инструментам программирования для загрузки индивидуальных переменных, например, в контроллер 103, для реализации корректировки поворота. В качестве альтернативы, оператор подъемника-загрузчика может располагать органами управления, которые позволяют оператору вводить индивидуальные параметры в контроллер, например, с помощью потенциометров, кодовых датчиков положения, пользовательского интерфейса программного обеспечения и т.п.
[0104] Выход алгоритма, как показано на фиг.10, может включать, например, выход, который определяет значение корректировки поворота, который может быть подсоединен от контроллера 103 к соответствующему механизму управления подъемником-загрузчиком 10. Например, значение корректировки поворота может включать значение "+/-" корректировки поворота, например, соответствующее повороту влево или повороту вправо, которое связано с блоком управления транспортным средством, контроллером 112 поворота, например, как показано на фиг.2, или иным соответствующим контроллером. Более того, дополнительные параметры, которые могут быть редактируемыми, например, для корректировки отклика управления, могут включать угол корректировки поворота, скорость изменения угла корректировки поворота, размер/диапазон зоны обнаружения бампера для каждой из зон поворота бампера, скорость подъемника-загрузчика при корректировке поворота и т.п.
[0105] Как показано на фиг.11, предположим, в иллюстративном примере, что подъемник-загрузчик 10 перемещается в ответ на прием по беспроводной связи дистанционного запроса на перемещение, и что перед тем, как подъемник-загрузчик 10 сможет переместиться на заранее заданное расстояние толчкового перемещения, подъемник-загрузчик 10 перемещается в положение, где опора стойки 172 стеллажа и соответствующий поддон 174 находятся на пути левой зоны 132А поворота бампера. Придерживаясь примера алгоритма в фиг.10, подъемник-загрузчик 10, например, через контроллер 103, может выполнить маневр, чтобы избежать столкновения с препятствиями, введя алгоритм корректировки поворота, чтобы повернуть подъемник-загрузчик вправо, например, контроллер 103 может вычислять или иным образом найти или получить угол корректировки поворота, который передается на контроллер 112 управления поворотом, чтобы повернуть приводное(ые) колесо(а) подъемника-загрузчика 10.
[0106] Подъемник-загрузчик 10 продолжает корректировку поворота до тех пор, пока не произойдет событие, такое как удаление объекта, например, когда сканирующий лазер или иной реализованный датчик более не обнаруживают объект в левой зоне 132 поворота бампера. Предположим, что подъемник-загрузчик 10 накопил длину перемещения, равную половине метра во время маневра корректировки поворота, который был установлен на 8 градусов. При обнаружении, что сигнал левой зоны поворота бампера отключен, реализуется компенсация поворота, чтобы компенсировать изменение в направлении, вызванное корректировкой поворота. В качестве примера, компенсация поворота может вызвать поворот подъемника-загрузчика 10 влево примерно на одну четверть метра накопленной длины перемещения, на 4 градуса. Для очень узких проходов датчики левой/правой зоны поворота бампера могут обеспечивать очень частые вводы данных/малое время между восприятиями объектов, по сравнению с относительно более широкими проходами.
[0107] Различные корректировки угла поворота и соответствующие компенсации противодействия уводу можно определить эмпирически, или углы, скорость изменения, накопленные расстояния и т.п. можно вычислить, смоделировать или получить иным образом.
[0108] В иллюстративной схеме-расположении, система старается поддержать подъемник-загрузчик 10 по центру прохода, когда подъемник-загрузчик 10 перемещается вперед в ответ на получение соответствующего переданного по беспроводной связи запроса на перемещение от передатчика устройства 70. Кроме того, компенсируется отскок, например, замеренный по расстоянию от осевой линии прохода склада. Более того, могут быть определенные условия, когда подъемник-загрузчик 10 может все еще требовать определенного вмешательства оператора для того, чтобы маневрировать вокруг определенных объектов на пути перемещения.
[0109] Как показано на фиг. 12, график иллюстрирует замеры скорости подъемника-загрузчика 10 во время маневра обхода препятствия. График на фиг.13 иллюстрирует корректировку поворота на заранее заданный угол поворота для иллюстрации общей корректировки, применяемой алгоритмом. График на фиг. 14 показывает движение подъемника-загрузчика 10 в функции от того, когда активна корректировка поворота, когда объект обнаружен в левой и/или правой зоне обнаружения бампера.
[0110] В соответствии с дальнейшими аспектами настоящего изобретения, алгоритм корректировки поворота можно настроить, чтобы держаться ближе к стенке/стеллажу, по сравнению с удержанием расстояния от стенки и/или стеллажа, например, добавление небольшого ухода подъемнику-загрузчику 10 позволит подъемнику-загрузчику 10 сохранять расстояние с небольшой величиной отклонения, относящегося к управлению по его расстоянию до неподвижной стенки/стеллажа.
[0111] Хотя левая и правая зоны 132А, 132В поворота бампера показаны, по меньшей мере, частично перед направлением перемещения вперед подъемника-загрузчика 10, альтернативно и/или дополнительно можно реализовать другие расположения, например, левую и правую зоны поворота бампера можно альтернативно расположить в направлении по бокам подъемника-загрузчика 10, например, как показано левой и правой боковыми зонами 132С, 132D поворота бампера. Кроме того, подъемник-загрузчик 10 может использовать первую пару левой и правой зон поворота бампера в направлении перемещения вперед подъемника-загрузчика 10, например, левую и правую зоны 132А, 132В поворота бампера, и вторую пару левой и правой зон 132С, 132D поворота бампера в направлении по бокам подъемника-загрузчика 10. В этой связи, конкретный алгоритм, использованный для осуществления корректировки поворота, может быть одинаковым или различным для каждой пары зон поворота бампера.
[0112] В качестве примера, боковые зоны 132С, 132D поворота бампера можно использовать для удержания подъемника-загрузчика 10 в целом вблизи стеллажа, стены или иного направления. В этой связи, можно использовать множество зон поворота бампера, например, установить область неоднозначности, например, такой, чтобы контроллер 103 удерживал направление, придерживаясь стены, стеллажа или иной конструкции между первым, наружным пределом поворота бампера и вторым, внутренним пределом поворота бампера. В качестве еще одной иллюстративной альтернативы предполагается, что подъемник-загрузчик остается непосредственно справа от стеллажа или другого сооружения, который находится слева от подъемника-загрузчика 10. Подъемник-загрузчик 10 может автоматически поворачивать налево на небольшую величину таким образом, чтобы направлять к сооружению. В этой связи, когда левая буферная зона руления 132С нарушается сооружением, корректировка руления, более подробно описанная в настоящем документе, повернет от сооружения. Однако, поскольку рулевое управление настроено на лишь небольшой поворот влево, подъемник-загрузчик 10 в конечном счете переместиться по направлению к сооружению, пока корректировка поворота снова не изменит положение подъемника-загрузчика 10. В качестве еще одного иллюстративного примера, компенсация поворота, например, по условию 158 на фиг. 10, может применяться для определенной окончательной компенсации, удерживая тем самым подъемник-загрузчик 10 вблизи от сооружения.
[0113] В качестве еще одного иллюстративного примера, зоны поворота бампера могут состоять из нескольких подзон поворота бампера в пределах контролируемого пространства вокруг подъемника-загрузчика 10 (будет описана ниже), где каждая подзона может быть связана с различными параметрами корректировки поворота, к примеру, например, чтобы дать возможность малозаметной коррекции поворота для объектов, обнаруженных дальше от подъемника-загрузчика 10, или дальше от опорной координаты RC, связанной с подъемником-загрузчиком 10 (см. фиг. 15А-15С), чем для объектов, обнаруженных ближе к подъемнику-загрузчику 10, или к опорной координате RC. Опорной координатой RC может быть заранее определенное место на подъемнике-загрузчике 10, к примеру, бампер, колесо, вилы, датчик 76 обнаружения препятствий и т.п., или опорной координатой RC может быть ось или плоскость, связанная с подъемником-загрузчиком 10, такая, как центральная ось СА подъемника-загрузчика 10 (см. Фиг. 15А-15С), которая может выступать наружу из подъемника-загрузчика 10. В качестве примера, корректировка поворота может иметь меньшее значение, например, 2 градуса, если объект обнаруживается в самой дальней области или подзоне от транспортного средства или от опорной координаты RC; промежуточное значение, например, 4 градуса, если объект обнаруживается в средней области или подзоне; и большее значение, например, 8 градусов, когда объект обнаруживается во внутренней области или подзоне. В качестве дальнейших альтернатив, замеры расстояния от подъемника-загрузчика 10 или опорной координаты RC до обнаруженного объекта можно использовать для динамической корректировки алгоритма поворота для совершения соответствующих маневров корректировки поворота.
[0114] В качестве еще одного иллюстративного примера, в дополнение или вместо изменения угла корректировки поворота, зависящего от того, насколько далеко от погрузчика 10 или опорной координаты RC определяется обнаруженный объект, каждая подзона может быть связана с различными параметрами корректировки поворота, чтобы позволить провести малозаметное корректировки поворота по линейной зависимости (по времени), т.е. скорости изменения угла поворота, которое выполняется для достижения требуемого угла корректировки поворота, для, обнаруженных дальше от подъемника-загрузчика 10, или дальше от опорной координаты RC, связанной с подъемником-загрузчиком 10, нежели для объектов, обнаруженных ближе к подъемнику-загрузчику 10 или к опорной координате RC. В качестве примера, угол поворота может быть «линейно нарастающим» на меньшее значение, т.е., угол поворота может изменяться медленнее или более постепенно, пока не будет достигнут требуемый угол корректировки поворота, если объект обнаруживается в самой дальней области или подзоне от транспортного средства или от опорной координаты RC; на промежуточное значение, если объект обнаруживается в средней области или подзоне; и на большее значение, когда объект обнаруживается во внутренней области или подзоне. В качестве дальнейших альтернатив, замеры расстояния от подъемника-загрузчика 10 или опорной координаты RC до обнаруженного объекта можно использовать для динамической корректировки линейно нарастающего значения для совершения соответствующих маневров корректировки поворота.
[0115] В качестве еще одного иллюстративного примера, может быть желательно применить первое, большее значение корректировки поворота, например, 10 градусов, при наступлении определенных заранее заданных условий, и применить второе, меньшее значение корректировки поворота, например, 7 градусов, во всех остальных случаях. Например, предположим, что оператор ведет подъемник-загрузчик 10 и доходит до конца прохода или ряда. Затем оператор маневрирует подъемником-загрузчиком 10, сделав поворот на 180 градусов, и попадает в соседний проход. Возможно, оператор излишне или недостаточно поворачивает при входе в соседний проход, таким образом, что направление движения подъемника-загрузчика 10 нельзя выровнять по проходу при втором, меньшем значении корректировки поворота. В этой ситуации может быть желательно применение большего значения корректировки поворота, чем обычно используется, чтобы дать подъемнику-загрузчику 10 выйти на прямое направление вдоль прохода.
[0116] Условия, которые должны иметь место до применения большего значения корректировки поворота, могут варьироваться, но в приведенном выше примере могут включать в себя следующее: первым условием может быть то, что должна быть достигнута или превышена предварительно выбранная скорость движения, такая, как, например, 3 мили в час. Вторым условием может быть то, что должен быть достигнут или превышен минимальный угол поворота, такой, как, например, 45 градусов. Третьим условием может быть то, что оператор должен присутствовать на подъемнике-загрузчике 10 во время наступления первого и второго условий. В приведенном выше примере, если каждое из этих трех условий выполняется, контроллер 103 выполняет один экземпляр большего значения корректировки поворота, к примеру, 10 градусов, если объект обнаруживается в одной из буферных зон поворота после наступления этих трех условий. Последующие применяемые корректировки поворота будут меньшего значения, например, 7 градусов, пока все три условия снова не наступят, и в этом случае другой единичный экземпляр большего значения корректировки поворота будет применен контроллером 103.
[0117] На фиг. 15А-15С показано сканируемое пространство 200, также называемое местностью. Пространство 200 может быть установлено контроллером 103 на основе данных датчика, полученных контроллером 103 от датчика 76 обнаружения препятствий, такого как лазерное сканирующее устройство. В этом варианте осуществления используется единичный датчик 76 обнаружения препятствий для предоставления данных датчика, хотя по желанию можно использовать дополнительные датчики 76. В примере варианта осуществления, датчик 76 обнаружения препятствий можно расположить на расстоянии от пола, по которому перемещается подъемник-загрузчик 10, при этом датчик 76 обнаружения препятствий сканирует в плоскости сканирования, которая ориентирована под углом от датчика 76 вниз по направлению к полу.
[0118] Пример пространства 200, показанный на фиг. 15А-15С, простирается в осевом направлении, т.е. параллельно центральной оси СА подъемника-загрузчика 10, от передней кромки 200А пространства 200 до задней кромки 200 В пространства 200. Передняя кромка 200А отстоит на предварительно определенное расстояние DF от передней части подъемника-загрузчика 10. Расстояние DF может быть любым подходящим расстоянием и в предпочтительном варианте осуществления - приблизительно от 1 метра до 5 метров. Задняя кромка 200 В находится в заданном местоположении L1, связанном с подъемником-загрузчиком 10. В качестве нескольких не ограничивающих примеров, расположение L1 можно определить на грузовом колесе подъемника-загрузчика 10, на задней кромке расчетного положения типового груза, перевозимого на подъемнике-загрузчике 10, или на концах вил 16, как показано на фиг. 15А-15С.
[0119] Пример пространства 200 в варианте осуществления изобретения, показанном на фиг. 15А-15С, простирается в боковом направлении, т.е. перпендикулярно центральной оси СА подъемника-загрузчика 10, от левой кромки 200С пространства 200 до правой кромки 200D пространства 200. Левая кромка 200С располагается сбоку на предварительно определенном расстоянии DL слева от центральной оси СА подъемника-загрузчика 10. Правая кромка 200D располагается сбоку на предварительно определенном расстояние DR справа от центральной оси СА подъемника-загрузчика 10. Расстояния DL и DR могут включать в себя любые подходящие расстояния, и в предпочтительном варианте осуществления оба - приблизительно от 2 метров до 5 метров. Нужно отметить, что расстояния DL и DR можно измерить от боков подъемника-загрузчика 10 или любого другого подходящего места, а не от центральной оси СА. Также надо отметить, что кромки 200A-200D пространства 200 могут иметь любую форму и не обязательно определяют прямые кромки. Например, кромки 200A-200D могут быть изогнутыми или могут иметь неровные или зубчатые части.
[0120] Пример пространства 200, показанный на фиг. 15А-15С, включает в себя сканируемую зону 202 и зону 204 данных окружающей обстановки. Сканируемая зона 202 активно сканируется датчиком 76 обнаружения препятствий во время работы подъемника-загрузчика 10. Зона 204 данных окружающей обстановки не сканируется активно датчиком 76 обнаружения препятствий, но объекты, которые детектируются в зоне сканирования 202, можно отслеживать, когда они проходят через зону 204 данных окружающей обстановки во время движения погрузчика-загрузчика 10, как будет описано в данном документе. Зона 204 данных окружающей обстановки включает первую часть 2040А, содержащую не сканированные области поперечно снаружи от сканируемой зоны 202, а также включает вторую часть 2040В, включающую область, которая расположена позади от сканируемой зоны 202, как показано на фиг. 15А-15С.
[0121] Сканируемая зона 202 простирается от передней кромки 200А пространства 200 до предварительно определенного осевого местоположения L2, каковое местоположение L2 в показанном варианте осуществления определяется близко к переднему краю подъемника-загрузчика 10, но может быть определено и в других областях. Сканируемая зона 202 простирается в поперечном направлении между заранее заданными поперечными местоположениями L3 и L4, каковые местоположения L3 и L4 поперечно разнесены от соответствующих сторон подъемника-загрузчика 10 и расположены между сторонами подъемника-загрузчика 10 и левой, и правой кромкой 200С и 200D пространства 200, как показано на фиг. 15А-15С.
[0122] Первая часть 2040А зоны 204 данных окружающей обстановки простирается в поперечном направлении снаружи от обеих сторон сканируемой зоны 202, т.е. от соответствующих местоположений L3 и L4, к левой и правой кромкам 200С и 200D пространства 200. Вторая часть 2040В зоны 204 данных окружающей обстановки простирается назад от сканируемой зоны 202, т.е., от местоположения L2, до задней кромки 200В пространства 200. Вторая часть 2040 В зоны 204 данных окружающей обстановки простирается поперечно между левой и правой кромкой 200С и 200D пространства 200.
[0123] Сканируемая зона 202 и зона 204 данных окружающей обстановки каждая включают в себя соответствующие левые и правые участи 202А, 202В и 204А, 204В. Левый участок 202А сканируемой зоны 202 в показанном варианте осуществления включает четыре сканируемые зоны: 202А1 202А2, 202А3, 202А4 (совместно именуемые в дальнейшем как сканируемые зоны 202А1-4), и правый участок 202В сканируемой зоны 202 в показанном варианте осуществления включает четыре зоны сканирования: 202В1, 202В2, 202В3, 202В4 (совместно именуемые в дальнейшем как сканируемые зоны 202B1-4). Примеры сканируемых зон 202А1-4 - 202B1-4, показанные на фиг. 15А-15С, по существу одного размера, и, в общем, прямоугольны по форме, за исключением сканируемых зон 202A4 и 202В4, расположенных ближе всего к подъемнику-загрузчику 10, имеющих наклонные нижние угловые части. Тем не менее, отмечается, что сканируемые зоны 202А1-4 - 202B1-4 могут иметь любой подходящий размер и форму. Далее, хотя сканируемые зоны 202А4 и 202В4, расположенные ближе всего к подъемнику-загрузчику 10, в показанном варианте осуществления немного выступают назад от передней части подъемника-загрузчика 10, т.е. до местоположения L2, сканируемые зоны 202А4 и 202В4, расположенные ближе всего к подъемнику-загрузчику 10, могут простираться до других местоположений без отхода от существа и объема настоящего изобретения. Кроме того, хотя каждая часть 202А, 202В сканируемой зоны 202 в показанном варианте осуществления включает четыре сканируемые зоны 202А1-4 - 202B1-4, дополнительные или меньшее количество зон сканирования можно предусмотреть в каждом из участков 202А, 202В.
[0124] Датчик 76 обнаружения препятствий сканирует сканируемые зоны 202А1-4 - 202B1-4 и отправляет данные датчиков контроллеру 103 по объектам, обнаруженным в сканируемых зонах 202А1-4 - 202B1-4. Данные датчиков, посылаемые датчиком 76 обнаружения препятствий, включают в себя данные для каждой сканируемой зоны 202А1-4 - 202B1-4, дающие представление о том, обнаруживается ли объект в соответствующей сканируемой зоне 202А1-4 - 202B1-4. Далее, если объект обнаруживается в сканируемой зоне 202А1-4 - 202B1-4, данные датчика включают в себя данные, дающие представление о расстоянии, на котором обнаруживается объект, находится от опорной координаты RC, связанной с транспортным средством. Опорной координатой RC может быть заранее определенное место на подъемнике-загрузчике 10, например, бампер, колесо, вилы, датчик обнаружения препятствий 76 и т.п., или опорная координата RC может быть осью или плоскостью, связанной с подъемником-загрузчиком 10. В показанном варианте осуществления, базовой координатой RC является центральная ось СА подъемника-загрузчика 10.
[0125] Как показано на фиг. 15А-15С, каждая сканируемая зона 202А1-4 - 202B1-4 включает в себя множество участков 220 сканирования. Участки 220 сканирования используются для отслеживания объектов в плоскости, в общем параллельной полу, и которые обнаруживаются в сканируемых зонах 202А1-4 - 202B1-4, как будет описано в данном документе. В предпочтительном варианте осуществления, каждая сканируемая зона 202А1-4 - 202B1-4 включает в себя от четырех до одиннадцати участков 220 (шесть участков 220 включены в каждую сканируемую зону 202А1-4 - 202B1-4 в показанном варианте осуществления), хотя дополнительное или меньшее количество участков 220 может быть включено в каждую сканируемую зону 202А1-4 - 202B1-4.
[0126] Зона 204 данных окружающей обстановки также включает в себя множество участков 222 сканирования. Участки 222 сканирования в первой части 2040А зоны 204 данных окружающей обстановки могут быть продолжениями участков 220 сканируемых зон 202А1-4 - 202B1-4. Участки 222 используются для отслеживания объектов, которые попадают в зону развития 204 из сканируемых зон 202А1-4 - 202B1-4, как будет описано в данном документе.
[0127] Первый и второй объекты 272, 274 проиллюстрированы в пространстве 200 на фиг. 15А-15С. Эти объекты 272, 274 детектируются датчиком 76 обнаружения препятствий во время работы, и датчик 76 обнаружения препятствий посылает данные датчика контроллеру 103 об объектах, 272, 274. Контроллер 103 использует данные датчиков для отнесения объектов 272, 274 к участкам 220 сканирования, определенным в пределах сканируемой зоны 202 на основе данных датчика от датчика 76 обнаружения препятствий. Как только объекты 272, 274 выхода из сканируемой зоны 202 и входят в зону 204 данных окружающей обстановки, объекты 272, 274 относятся к участкам 222 сканирования в зоне 204 данных окружающей обстановки.
[0128] Участки 220, 222 сканирования используются для отслеживания объектов 272, 274 в пространстве 200, по мере того, как движется подъемник-загрузчик 10. То есть, по мере того как подъемник-загрузчик 10 движется, контроллер 103 отслеживает объекты 272, 274, используя последующие данные датчика от датчика 76 обнаружения препятствий для повторного отнесения объектов 272, 274 к соседним участкам 220 сканирования, и/или используя точный расчет траектории для повторного отнесения объектов 272, 274 к соседним участкам 220, 222 сканирования. Повторно относя объекты 272, 274 к соседним участкам 220, 222 сканирования, контроллер 103 способен определить обновленное осевое расстояние, на котором объекты 272, 274 находятся от подъемника-загрузчика 10. Контроллер 103 также может определять обновленное боковое расстояние, на котором объекты 272, 274 находятся от подъемника-загрузчика 10, используя последующие данные датчика и/или точный расчет траектории. В предпочтительном варианте осуществления, объекты 272, 274 отслеживаются контроллером 103 до тех пор, пока они больше не определяются, как находящиеся в пространстве 200.
[0129] Необходимо отметить, если датчик 76 обнаружения препятствий сканирует в плоскости сканирования, которая ориентирована под углом от датчика 76 вниз по направлению к полу, некоторые объекты, которые детектируются в одной или нескольких сканируемых зонах 202А1-4 - 202B1-4, могут не обнаруживаться в одной из соседних сканируемых зон, несмотря на то, что объект находится в пределах осевого размера соседней сканируемой зоны. Например, более короткие объекты могут детектироваться датчиком 76 обнаружения препятствий в сканируемой зоне 202А1, но могут не обнаруживаться датчиком обнаружения препятствий 76 при входе в осевой размеры соседней зоны 202А2. В то время как данные датчика с датчика 76 обнаружения препятствий могут не показывать, что объект находится в зоне 202А2, то есть, ввиду того, что объект находится под плоскостью сканирования датчика 76, объект все же отслеживается в пространстве 200 посредством точного расчета траектории.
[0130] Как показано на фиг. 16А-16С, проиллюстрированы примеры зон 280 действия, определенных в пространстве 200. Зону 280 действия можно использовать для реализации различных маневров поворота, как будет описано в данном документе. Зоны действия 280 в показанном варианте осуществления разделены на левую и правую зону 282, 284 действия, где левая зона 282 действия находится слева от центральной оси СА подъемника-загрузчика 10, а правая зона 284 действия расположена справа от центральной оси СА подъемника-загрузчика 10.
[0131] Пример зон 280 действия, показанный на фиг. 16А-16С, включает левую и правую зоны 300, 302 остановки, левые и правые зоны 304, 306 без поворота, левую и правую зону 308, 310 поворота, и левую и правую зону 312, 314 движения близко к стенкам или стеллажам.
[0132] Левая и правая зоны 300, 302 остановки расположены перед и непосредственно сразу за боковинами подъемника-загрузчика 10. Если объект обнаруживается в одной из зон 300, 302 остановки, контроллер 103 начнет задействовать тормоз, чтобы заставить подъемник-загрузчик 10 остановиться.
[0133] Сбоку снаружи от зон 300, 302 остановки расположены левая и правая зоны 304, 306 без управления поворотом. Левая и правая зоны 304, 306 без управления поворотом включают в себя переднюю и заднюю части 304А, 306А и 304В, 306В. Передние части 304А, 306А зон 304, 306 без управления поворотом могут включать сканируемые части зон 304, 306 без управления поворотом, т.е. части зон 304, 306 без управления поворотом, соответствующие сканируемой зоне 202, в то время как задние части 304 В, 306В зон 304, 306 без управления поворотом могут содержать не сканируемые части 304, 306 зон без управления поворотом, т.е. части зон 304, 306 без управления поворотом, соответствующие второй части 2040 В прошедшей зоны 204. Если объект обнаруживается в одной из зон 304, 306 без управления поворотом, контроллер 103 не позволяет транспортному средству поворачивать в зоны 304, 306 без управления поворотом, в которых был обнаружен объект, пока объект не выйдет из соответствующих зон без 304, 306 управления поворотом.
[0134] Сбоку снаружи от зон 304, 306 без поворота расположены левая и правая зоны 308, 310 управления поворотом. Левая и правая зоны 308, 310 управления поворотом включают переднюю и заднюю части 308А, 310А и 308В, 310В. Передние части 308А, 310А зон 308, 310 управления поворотом могут включать в себя сканируемые части 308, 310 зон управления поворотом, т.е., части зон 308, 310 поворота, соответствующие сканируемой зоне 202, в то время как задние части 308В, 310В зон 308, 310 управления поворотом могут содержать не сканируемые части зон 308, 310 управления поворотом, т.е. части зон 308, 310 управления поворотом, соответствующие второй части 2040В прошедшей зоны 204. Если объект обнаруживается в одной из задних частей 308В, 310В зон 308, 310 управления поворотом, контроллер 103 позволяет транспортному средству повернуть в зону 308, 310 управления поворотом, в которой объект обнаружен, то есть, пока объект не войдет в смежную 304 зону без поворота, 306, когда контроллер 103 не позволит дополнительно поворачивать подъемник-загрузчик 10 в направлении соответствующей зоны 304, 306 без управления поворотом, и когда контроллер 103 может выполнять другой маневр поворота, как будет описано в настоящем документе. Необходимо отметить, что в предпочтительном варианте осуществления, контроллер 103 не выполняет маневр поворота, чтобы повернуть подъемник-загрузчик 10 в зону 308, 310 управления поворотом, если объект обнаруживается в ее передней части 308А, 310А, хотя контроллер 103 и можно запрограммировать на реализацию такого маневра поворота.
[0135] Сбоку снаружи от зон 308, 310 управления поворотом расположены левая и правая зоны 312, 314 захвата. Зоны 312, 314 захвата могут использоваться контроллером 103, чтобы управлять подъемником-загрузчиком 10 относительно выбранных объектов таким образом, чтобы можно было по существу удерживать подъемник-загрузчик на необходимом расстоянии от выбранного объекта, как будет описано в данном документе со ссылкой на фиг. 17А-17С. Боковые внутренние границы зон 312, 314 захвата определяются левой и правой линией 312А, 314А зоны захвата, как показано на фиг. 16А-16С и 17А-17С.
[0136] Выбор каких-либо из зон действий 280, или их части, может использоваться контроллером 103 для реализации дополнительных маневров поворота, например, зоны 304, 306 без управления поворотом, и все или части зон 308, 310 управления поворотом могут определять соответствующую левую и правую 316, 318 зоны поворота отвода, например, зоны 316, 318 поворота отвода могут определяться зонами 304, 306 без поворота и передними частями 308А, 310А, но не задними частями 308В, 310В зон 308, 310 управления поворотом. Если объект обнаруживается или иным образом определяется как находящийся, например, с помощью точного расчета траектории, в одной из зон 316, 318 поворота отвода подъемник-загрузчик 10 может отводиться от объекта, до тех пор, пока еще один объект не будет найден в зоне 302, 304 остановки, зоне 304, 306 без управления поворотом или в передней части 308А, 310А зоны 308, 310 управления поворотом на противоположной стороне подъемника-загрузчика 10. Отмечается, что примеры зоны 316, 318 поворота отвода, описанные и проиллюстрированные в данном документе, могут быть определены другими зонами 280 действий или их частями.
[0137] Контроллер 103 может осуществлять различные маневры поворота при наступлении определенных предварительно заданных условий. Первый пример события происходит, когда объект обнаруживается в пределах сканируемой зоны 202 датчиком 76 обнаружения препятствий и определяется, как находящийся в пределах левой или правой линии 312А, 314А зоны захвата. Если объект обнаруживается в сканируемой зоне 202 и в пределах левой или правой линии 312А, 314А зоны захвата, контроллер 103 попытается выполнить увод поворотом подъемника-загрузчика 10 от обнаруженного объекта на столько, на сколько такой маневр поворота разрешен, т.е., пока второй объект не обнаруживается в пределах 302, 304 зон остановки, зон 304, 306 без управления поворотом или передней части 308А, 310A зоны 308, 310 управления поворотом на противоположной стороне подъемника-загрузчика 10.
[0138] Второй пример события происходит, когда объект обнаруживается или иным образом определяется, как находящийся, например, путем точного расчета траектории, в пределах зоны 304, 306 без управления поворотом, и объект расположен между передней кромкой 200А пространства 200 и заранее заданным осевым расположением L5, связанным с подъемником-загрузчиком 10, см. Фиг. 16А-16С. Заранее заданное местоположение L5, связанное с подъемником-загрузчиком 10, можно определить, например, на осевом расположении, где вилы 16 выходят из подъемника-загрузчика 10. Заранее заданное осевое местоположение L5 может альтернативно быть определено с учетом заранее заданного расстояния от передней кромки 200А пространства 200. При наступлении события в соответствии с данным примером, контроллер 103 попытается выполнить увод поворотом от обнаруженного объекта на столько, на сколько такой маневр поворота разрешен, т.е., пока второй объект не обнаруживается в пределах зон остановки 302, 304, зон 304, 306 без управления поворотом или передней части 308А, 310А зоны 308, 310 управления поворотом на противоположной стороне подъемника-загрузчика 10.
[0139] Третий пример случая происходит, когда какой-либо первый объект обнаруживается датчиком 76 обнаружения препятствий в пределах левой линии 312А зоны захвата, а другой объект обнаруживается датчиком 76 обнаружения препятствий в пределах правой линии 314А зоны захвата. В этом случае, контроллер 103 будет осуществлять маневр поворота для удержания подъемника-загрузчика 10 на прямом направлении, пока не произойдет чего-то из следующего: один из объектов перемещается за пределы соответствующей линии 312А, 314А зоны захвата; один из объектов входит в заднюю часть 308В, 310В зоны 308, 310 управления поворотом; один из объектов покидает пространство 200; или один из объектов входит в зону 300, 302 остановки. При наступлении одного из этих событий, контроллер 103 может реализовать другой маневр поворота или инициировать работу тормоза, в зависимости от расположения объекта(ов).
[0140] Четвертый пример события происходит, когда маневр «захвата» осуществляется контроллером 103. Дополнительные подробности в связи с маневром захвата будут описаны ниже со ссылкой на фиг. 17А-17С.
[0141] Как показано на фиг. 16А-16С последовательно, будут описаны примеры маневров поворота, выполненные контроллером 103 во время движения подъемника-загрузчика 10. Подъемник-загрузчик 10 может перемещаться в ответ на прием по беспроводной связи дистанционного запроса на перемещение, т.е. от радиопередатчика, как подробно описано в данном документе. Альтернативно подъемник-загрузчик 10 может двигаться накатом до остановки или может управляться вручную оператором, едущим на подъемнике-загрузчике 10, или идущим рядом с ним.
[0142] На фиг. 16А, датчик 76 обнаружения препятствий обнаруживает первый и второй объекты 272, 274 в сканируемой зоне 202. Датчик 76 обнаружения препятствий посылает контроллеру 103 данные датчика, которые включают в себя информацию о первом и втором объектах 272, 274. Данные датчика включают в себя данные, дающие представление о том, в какой из зон 202A1-A4, 202В1-В4 сканирования (см. Фиг. 15А-15С) находятся объекты 272, 274. Данные датчика также включают в себя данные, дающие представление о боковом расстоянии, на котором объекты 272, 274 находятся от опорной координаты RC, т.е. от центральной оси СА подъемника-загрузчика 10 в показанном варианте осуществления.
[0143] На фиг. 16А наиболее близкая сбоку часть первого объекта 272 определена, как находящаяся в сканируемой зоне 202 и расположенная за пределами левой линии 312А захвата в левой зоны захвата 312, а наиболее близкая сбоку часть второго объекта 274 определена, как находящаяся в сканируемой зоне 202 и расположенная внутри правой линии 314А захвата в передней части 310А правой зоны 310 управления поворотом. Отмечается, что, если часть первого объекта 272 находится вне левой 312 зоны захвата и часть второго объекта 274 находится в правой зоне 314 захвата, контроллер 103 может быть первично занят частью любого обнаруженного объекта, который ближе сбоку к подъемнику-загрузчику 10. На основании информации о местоположении объекта, полученной из данных датчика, определяется, что наиболее близкая сбоку часть второго объекта 274 находится ближе, чем наиболее близкая сбоку часть первого объекта 272 к центральной оси СА подъемника-загрузчика 10. На основе местоположений первого и второго объектов 272, 274 на фиг. 16А, контроллер 103 автоматически выполняет маневр поворота, чтобы направить подъемник-загрузчик 10 по направлению к первому объекту 272, таким образом, чтобы выполнить увод поворотом подъемника-загрузчика 10 от второго объекта 274.
[0144] Подъемник-загрузчик 10 непрерывно выполняет поворот в направлении первого объекта 272 и поворот увода от второго объекта 274, до возникновения одного из двух условий. Первое условие - это то, что первый объект 272 (или иной объект, определенный, как находящийся в пространстве 200) входит в заранее определенную часть левой зоны 282 действия. Заранее определенная часть левой зоны 282 действия включает в себя часть левой зоны 282 действия, где дальнейший поворот подъемника-загрузчика 10 по направлению к первому объекту 272 определяется, как недопустимый. Заранее определенная часть левой зоны 282 действия в примере показанного варианта осуществления - это либо передняя часть 308А левой зоны 308 управления поворотом или задняя часть 304 В левой зоны 304 без управления поворотом, но может быть и другими левыми зонами 282 действия или их частями. Второе условие - это то, что второй объект 274 (и любые иные объекты, определенные, как находящиеся в правой зоне 284 действия) полностью покидает заранее определенную часть правой зоны 284 действия. Заранее определенная часть правой зоны 284 действия включает в себя часть правой зоны 284 действия, где дальнейшее действие по повороту увода подъемника-загрузчика 10 от второго объекта 274 определяется, как не требующееся. Заранее определенная часть правой зоны 284 действия в показанном варианте осуществления - это передняя часть 310A правой зоны 310 управления поворотом, если второй объект 274 находится в сканируемой зоне 202, то есть таким образом, что второй объект 274 полностью вне правой линии 314А захвата, или задняя часть 306В правой зоны 306 без управления поворотом перед расположением L5, если второй объект 274 находится во второй части 2040 В зоны 204 данных окружающей обстановки, но может быть и другими правыми зонами 284 действия или их частями.
[0145] На фиг. 16В первое условие иллюстрируется, как состоявшееся, т.е., первый объект 272 входит в переднюю часть 308А левой зоны 308 управления поворотом. Пока первый и второй объекты 272 и 274 оба находятся в сканируемой зоне 202 так, что они активно обнаруживаются датчиком 76 обнаружения препятствий, и пока наиболее близкая сбоку часть первого объекта 272 находится в передней части 308А левой зоны 308 управления поворотом, а наиболее близкая сбоку часть второго объекта находится в передней части 310А правой зоны 310 управления поворотом, контроллер 103 будет осуществлять маневр поворота так, что подъемник-загрузчик 10 будет удерживать направление прямо. Как отмечалось выше, подъемник-загрузчик 10 будет удерживать направление прямо, пока не произойдет одного из следующего: наиболее близкая сбоку часть одного из объектов 272, 274 переместится за пределы линии 312А, 314А захвата; наиболее близкая к центру в боковом направлении часть одного из объектов 272, 274 войдет в заднюю часть 308В, 310В зоны 308, 310 управления поворотом; или один из объектов покинет пространство 200.
[0146] На фиг. 16С наиболее близкая сбоку часть второго объекта 274 показана, как переместившаяся в заднюю часть 310В правой зоны 310 управления поворотом. В этой ситуации второй объект 274 перешел, перестав сканироваться датчиком 76 обнаружения препятствий в сканируемой зоне 202, в не сканируемую вторую часть 2040В зоны 204 данных окружающей обстановки, и, таким образом, отслеживаясь по точному расчету траектории. Поскольку наиболее близкая сбоку часть первого объекта 272 находится в передней части 308А левой зоны 308 управления поворотом и второй объект 274 находится в задней части 310В правой зоны 310 управления поворотом, контроллер 103 автоматически осуществляет маневр поворота, чтобы выполнить увод поворотом подъемника-загрузчика 10 от первого объекта 272 так, чтобы повернуть подъемник-загрузчик 10 в направлении ко второму объекту 274. Подъемник-загрузчик 10 продолжит выполнять поворот от первого объекта 272 и поворачиваться в направлении ко второму объекту 274, пока не наступит один из следующих примеров условий: наиболее близкая сбоку часть первого объекта 272 войдет в заднюю часть 308В левой зоны 308 управления поворотом; первый объект 272 определен, как полностью находящийся вне левой линии захвата 312А; или пока объект не будет определен, как находящийся в правой зоне 306 без управления поворотом или в передней части 31OA правой зоны 310 управления поворотом. Если имеет место одно из этих событий, контроллер 103 может осуществить последующий маневр поворота, как описано в данном документе.
[0147] Если в любой момент во время работы первый и/или второй объект 272, 274 входит в одну из зон 300, 302 остановки, контроллер 103 инициирует работу тормоза, чтобы заставить подъемник-загрузчик 10 остановиться, как описывалось выше.
[0148] Фиг. 17А-17С последовательно демонстрируют виды подъемника-загрузчика 10, выполняющего маневры поворота в соответствии с другим аспектом настоящего изобретения. Фиг. 17А-17С будут рассмотрены в контексте зон 280 действия, рассмотренных выше со ссылкой на Фиг. 16А-16С. Подъемник-загрузчик 10 может перемещаться в ответ на прием по беспроводной связи запроса по беспроводной связи на перемещение, т.е. от радиопередатчика, как подробно описано в данном документе. Альтернативно подъемник-загрузчик 10 может двигаться накатом до остановки или может управляться вручную оператором, едущим на подъемнике-загрузчике 10, или идущим рядом с ним.
[0149] На фиг. 17А, датчик 76 обнаружения препятствий обнаруживает какой-либо выбранный объект 276 в сканируемой зоне 202. Датчик 76 обнаружения препятствий посылает контроллеру 103 данные датчика, которые включают информацию о выбранном объекте 276. Данные датчика включает в себя данные, дающие представление о том, в какой из зон сканирования 202A1-A4, 202В1-В4 (см. Фиг. 15А-15С) расположен выбранный объект 276. Данные датчика также включают в себя данные, дающие представление о боковом расстоянии, на котором выбранный объект 276 находится от опорной координаты RC, т.е. от центральной оси СА подъемника-загрузчика 10 в показанном варианте осуществления. Выбранным объектом 276 может быть стойка или торец сложенной продукции, имеющий в целом простирающуюся в осевом направлении внутреннюю в боковом направлении часть 276А кромки, хотя следует понимать, что выбранным объектом 276 могут быть и иные объекты.
[0150] В пространстве 200, показанном на фиг. 17А, на основании данных датчика от датчика 76 обнаружения препятствий, определяется, что участок 276А кромки выбранного объекта 276 находится в правой зоне 310 управления поворотом. На основании обнаруженного расположения выбранного объекта 276, показанного на Фиг.17А, контроллер 103 автоматически реализует маневр поворота, чтобы выполнить увод поворотом подъемника-загрузчика 10 от выбранного объекта 276 с целью поворота подъемником-загрузчиком 10 так, чтобы подъемник-загрузчик 10, по существу, сохранял необходимое расстояние от участка кромки 276А выбранного объекта 276, т.е., так, чтобы подъемник-загрузчик 10 «захватывал» участок кромки 276А выбранного объекта 276. В одном варианте осуществления замысел маневра поворота может быть таким, чтобы выбранный объект 276 по меньшей мере, частично, удерживался в правой зоне захвата 314. Дополнительно или альтернативно, назначение маневра поворота может быть таким, чтобы часть выбранного объекта 276, например, участок 276А кромки по существу удерживался в правой линии 314А захвата, которая связана с правой зоной 314 захвата.
[0151] В показанном примере варианта осуществления, назначение маневра поворота - постоянно выполнять увод поворотом подъемника-загрузчика 10 от выбранного объекта 276, пока выбранный объект 276 по меньшей мере, частично, удерживается в правой зоне 314 захвата и пока участок 276А кромки выбранного объекта 276 по существу удерживается на правой линии 314А захвата.
[0152] На фиг. 17В проиллюстрирован пример условия, где подъемник-загрузчик 10 «промахнулся» мимо правой линии 314А захвата так, что участок 276А кромки выбранного объекта 276 прошел мимо правой линии 314А захвата. В этом случае контроллер 103 автоматически реализует маневр поворота, чтобы направить подъемник-загрузчик 10 по направлению к выбранному объекту 276, пока участок 276А кромки выбранного объекта 276 удерживается на правой линии 314А захвата. Необходимо отметить, что, поскольку ни одна часть выбранного объекта 276 не находится в правой зоне 306 без управления поворотом или в передней части 310А правой зоны 310 управления поворотом на Фиг. 17В, подъемнику-загрузчику 10 разрешается повернуть в направлении к выбранному объекту 276.
[0153] На фиг. 17С, после выполнения маневра поворота, который направляет подъемник-загрузчик 10 к выбранному объекту 276 так, чтобы часть 276А кромки выделенного объекта 276 была расположена на правой линии 314А зоны захвата, контроллер 103 осуществляет маневр поворота для достижения прямого курса подъемника-загрузчика 10 в осевом направлении, т.е. параллельно центральной оси СA так, чтобы удерживать часть 276А кромки выбранного объекта 276 на правой линии 314А зоны захвата. Подъемник-загрузчик 10 продолжает перемещаться прямо, пока выбранный объект 276 не будет больше определяться, как находящийся в пространстве 200, или пока участок 276А кромки выбранного объекта 276 не будет больше определяться, как находящийся на правой 314А линии зоны захвата, когда контроллер 103 сможет осуществить маневр поворота так, чтобы правая линии 314А зоны захвата совпала с участком 276А кромки выбранного объекта 276.
[0154] Согласно одному варианту осуществления, если несколько объектов расположены в пространстве 200, выбранный объект 276 может быть объектом, который определяется, как расположенный ближе всего к левой линии 312А зоны захвата или правой линии 314А зоны захвата. Альтернативно выбранным объектом 276 может быть первый объект, который обнаружен в сканируемой зоне 202 датчиком 76 обнаружения препятствий, или может быть первый объект, который определяется, как находящийся как минимум в одной из зон 308, 310 управления поворотом и зон 304, 306 без управления поворотом. В качестве другого примера, выбранным объектом 276 может быть объект, который определяется как ближайший объект к подъемнику-загрузчику 10 в пространстве 200, по измерениям в поперечном направлении.
[0155] Далее, контроллер 103 можно запрограммировать на выполнение только маневра поворота для «захвата» выбранного объекта, если объект обнаруживается в выбранной одной из левой и правой зон 312, 314 захвата. Например, может потребоваться, чтобы подъемник-загрузчик 10 захватывал только объекты, расположенные по правой стороне подъемника-загрузчика 10. При таком расположении, подъемник-загрузчик 10 может перемещаться управляемым образом вдоль правой стороны прохода, когда другой подъемник-загрузчик будет двигаться в противоположном направлении с другой стороны прохода. В качестве другого примера, если оператор будет брать предметы, расположенные только справа по проходу, подъемник-загрузчик 10 может захватывать только стойку или торец сложенной продукции с правой стороны от подъемника-загрузчика 10 так, чтобы минимизировать расстояние, на которое оператор должен пройти от стойки к подъемнику-загрузчику 10.
[0156] Кроме того, далее, маневр захвата, описанный в данном документе, можно осуществить с помощью контроллера 103 в одном варианте осуществления только при разрешении на его выполнение, например, оператор может отжать кнопку, которая может быть расположена на подъемнике-загрузчике 10 или на устройстве дистанционного управления, как описано в данном документе. По получении разрешения на осуществление маневра захвата, контроллер 103 переходит в режим «осуществления захвата», в котором контроллер 103 ищет объекты в сканируемой зоне 202 для захвата. Дополнительно, оператор может определить предпочтения захвата, такие, как захватить ли объект с левой или с правой стороны от подъемника-загрузчика 10, первый объект, который обнаруживается в сканируемой зоне 202, объект, который определяется, как расположенный ближе всего к центральной оси СA подъемника-загрузчика 10 и т.п. Дополнительно, когда объект, который захватили, больше не находится в пространстве 200, подъемник-загрузчик может продолжать перемещаться вперед в прямом направлении, пока новый объект для захвата не будет обнаружен датчиком 76 обнаружения препятствий. Если новый объект обнаруживается датчиком 76 обнаружения препятствий в пространстве 200, контроллер 103 можно запрограммировать на автоматическое захватывание нового объекта, или контроллеру 103 может потребоваться
[0157] Более того, маневры захватывания, использованные в связи с зонами 312, 314 захвата, описанными в настоящем документе со ссылкой на Фиг. 17А-17С, можно использовать в сочетании с другими зонами 280 действий, описанными выше со ссылкой на Фиг. 16А-16С.
[0158] Из приведенного таким образом описания изобретения, изложенного в настоящей заявке, выполненного в виде подробного изложения и путем ссылок на варианты его осуществления, очевидна возможность различных его дополнений и изменений, которые не выходят за пределы сущности и объема изобретения, которые заявлены в прилагаемой формуле.
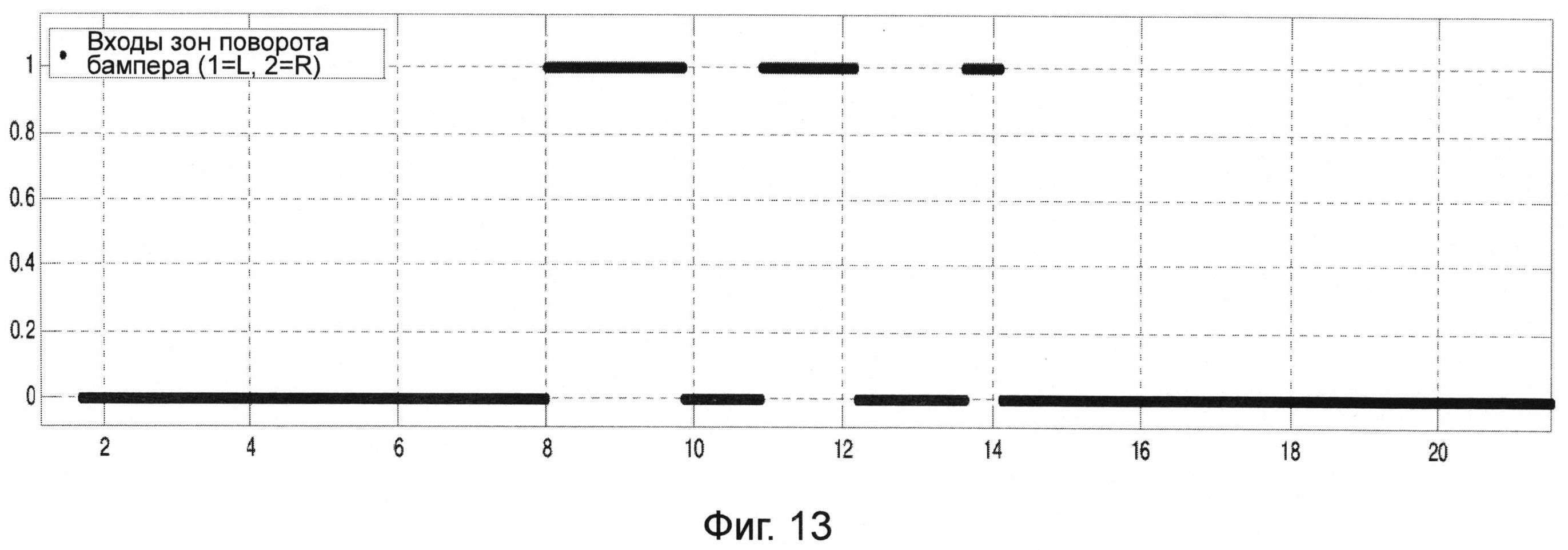
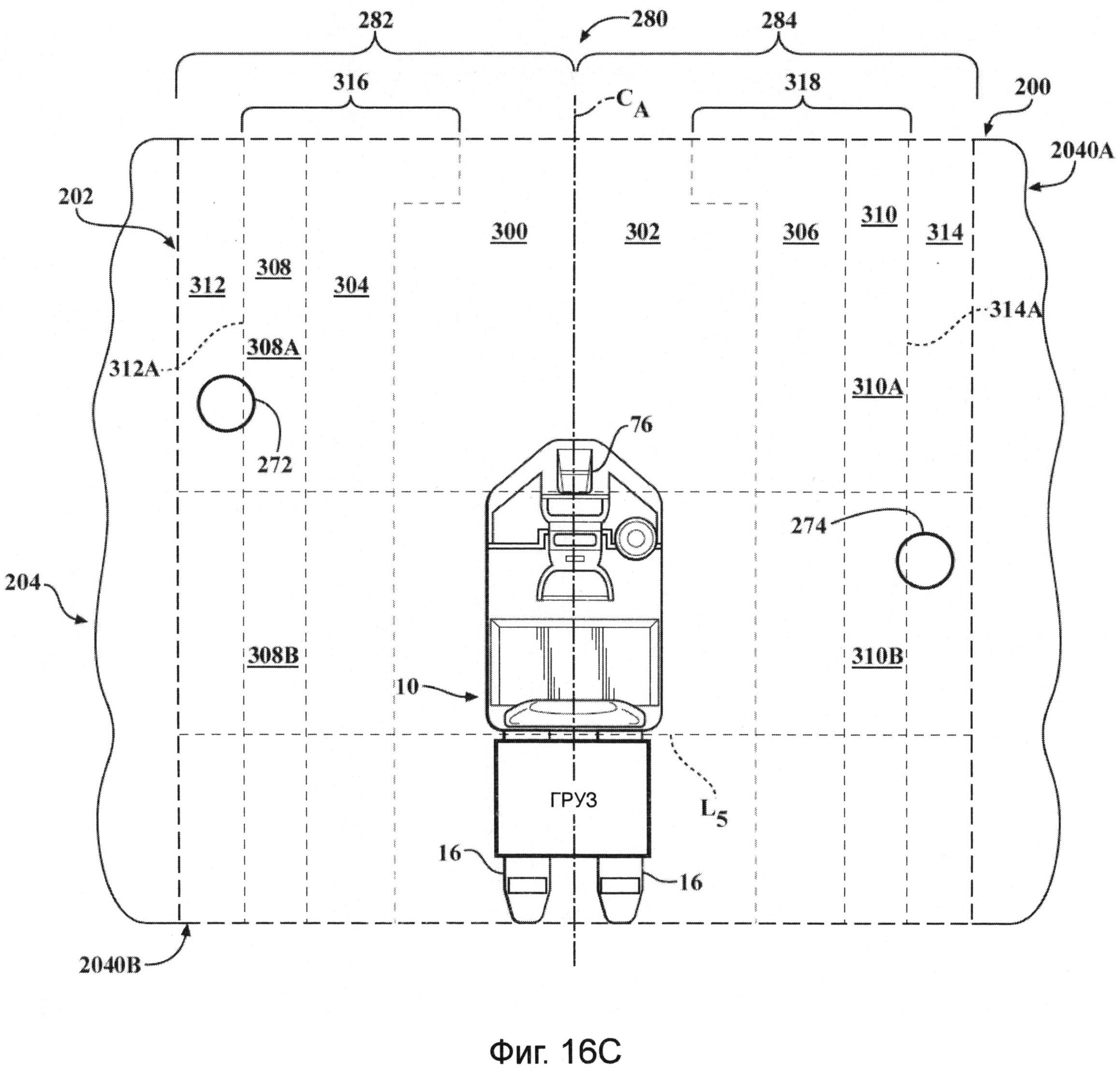
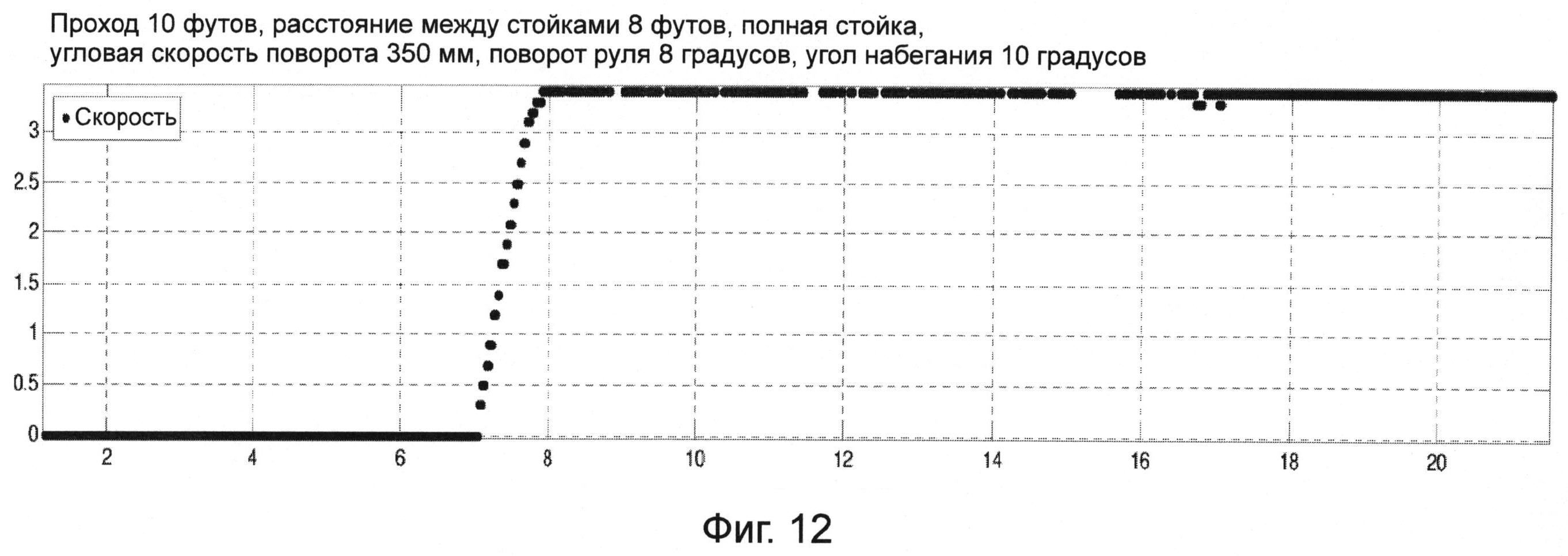
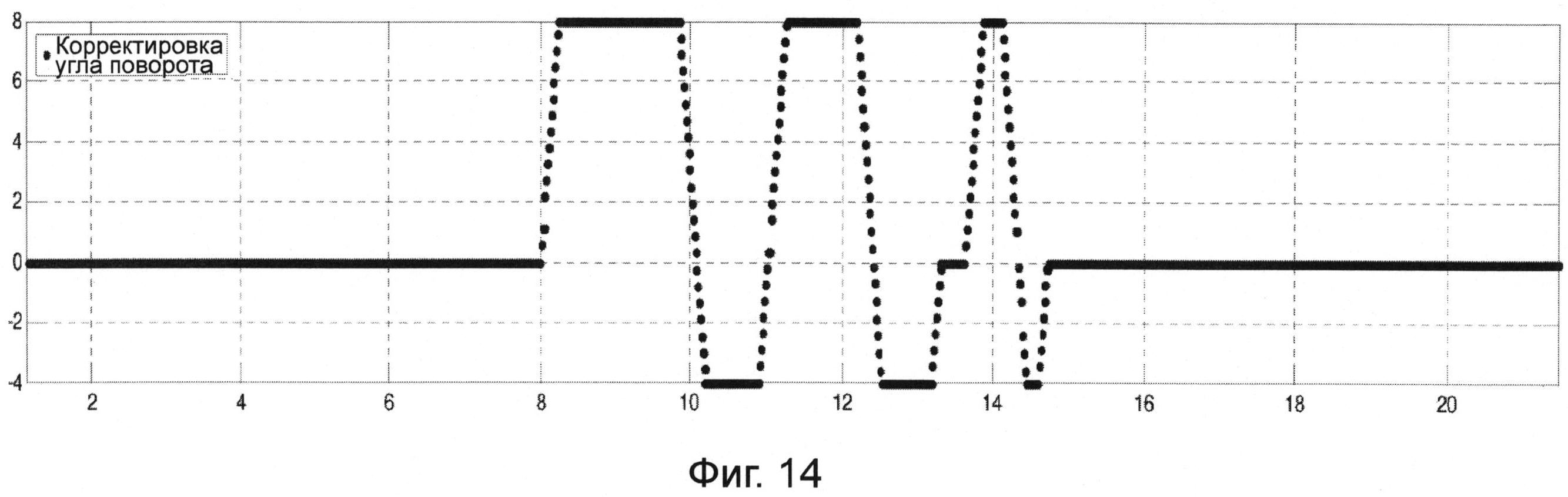
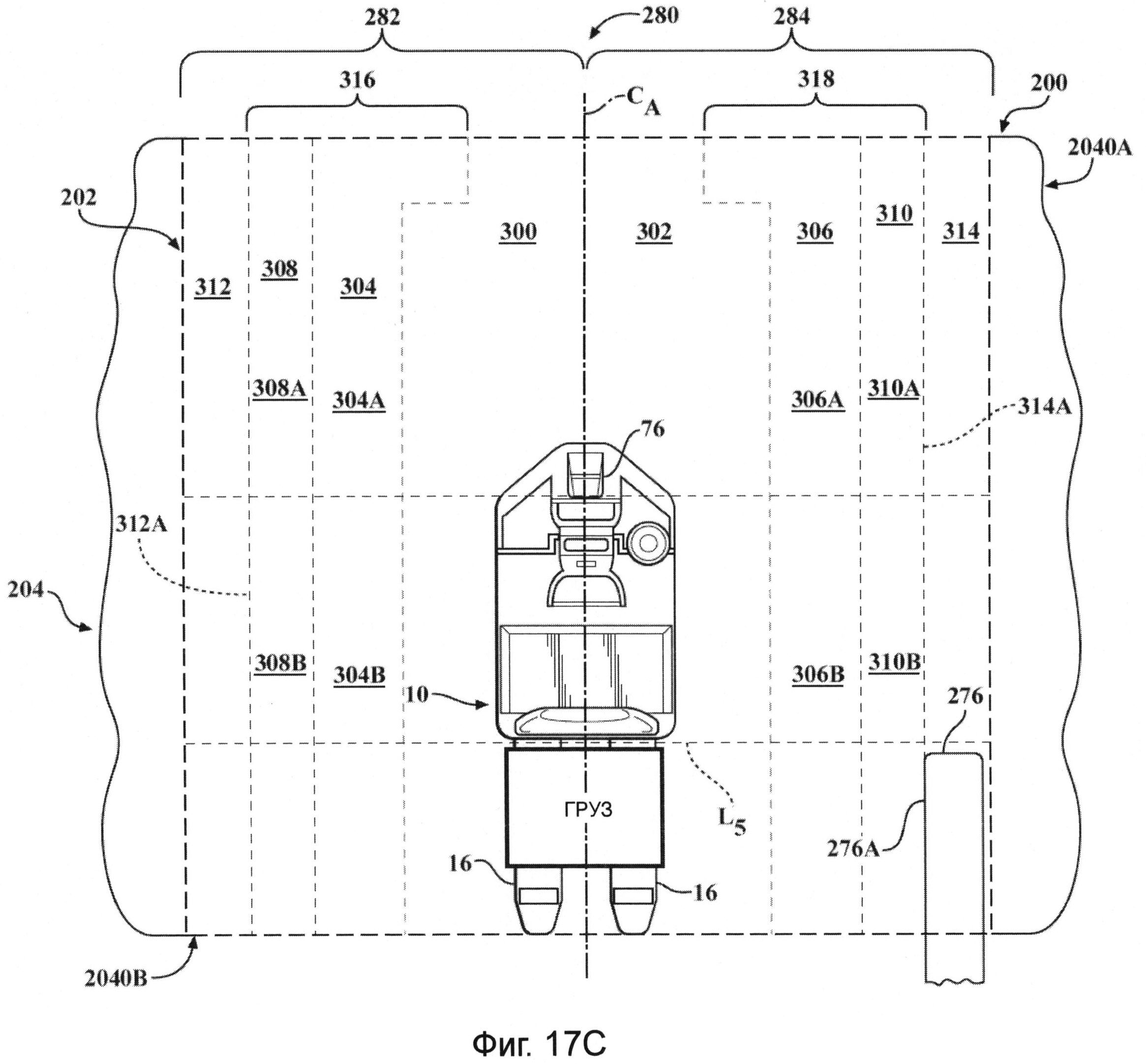
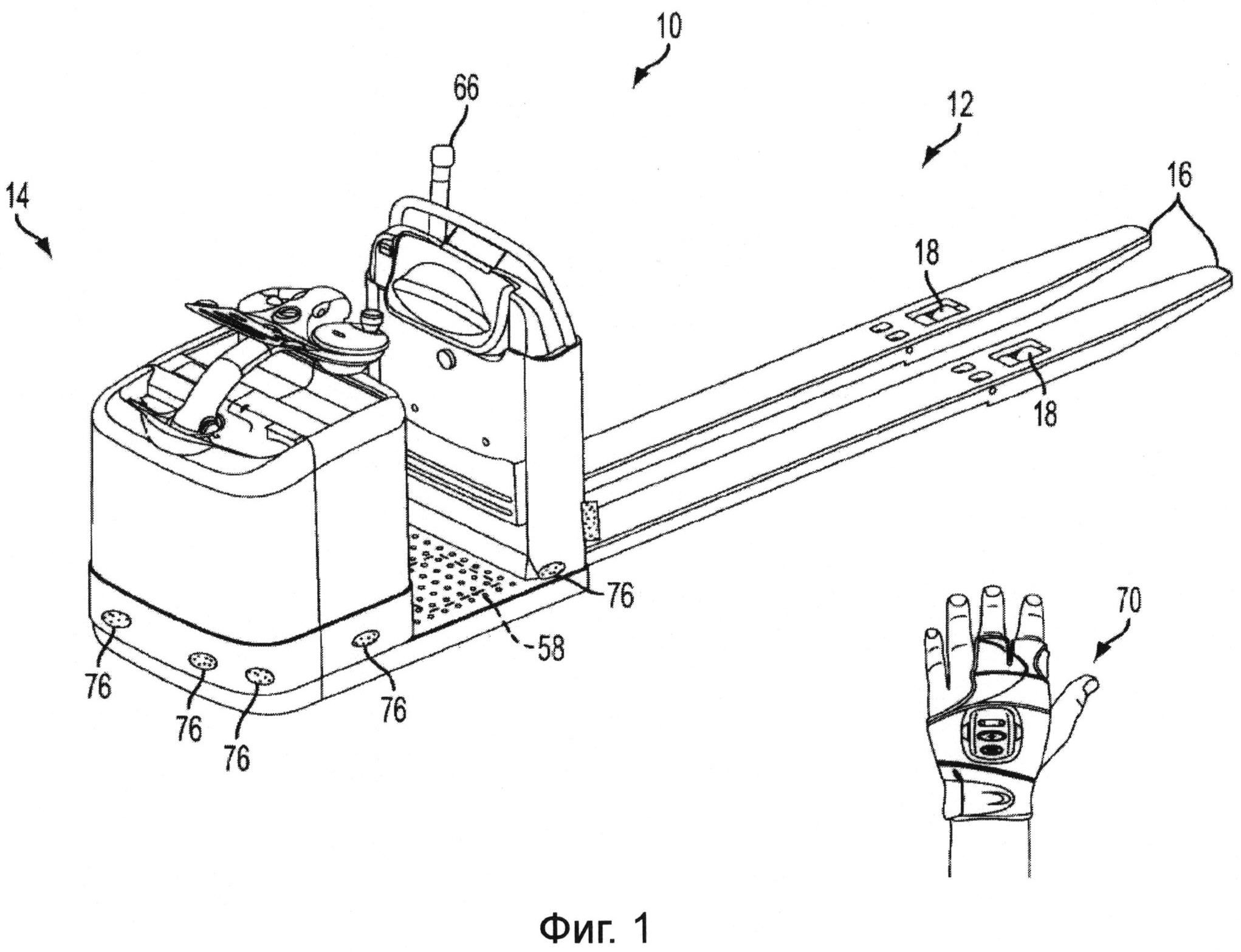
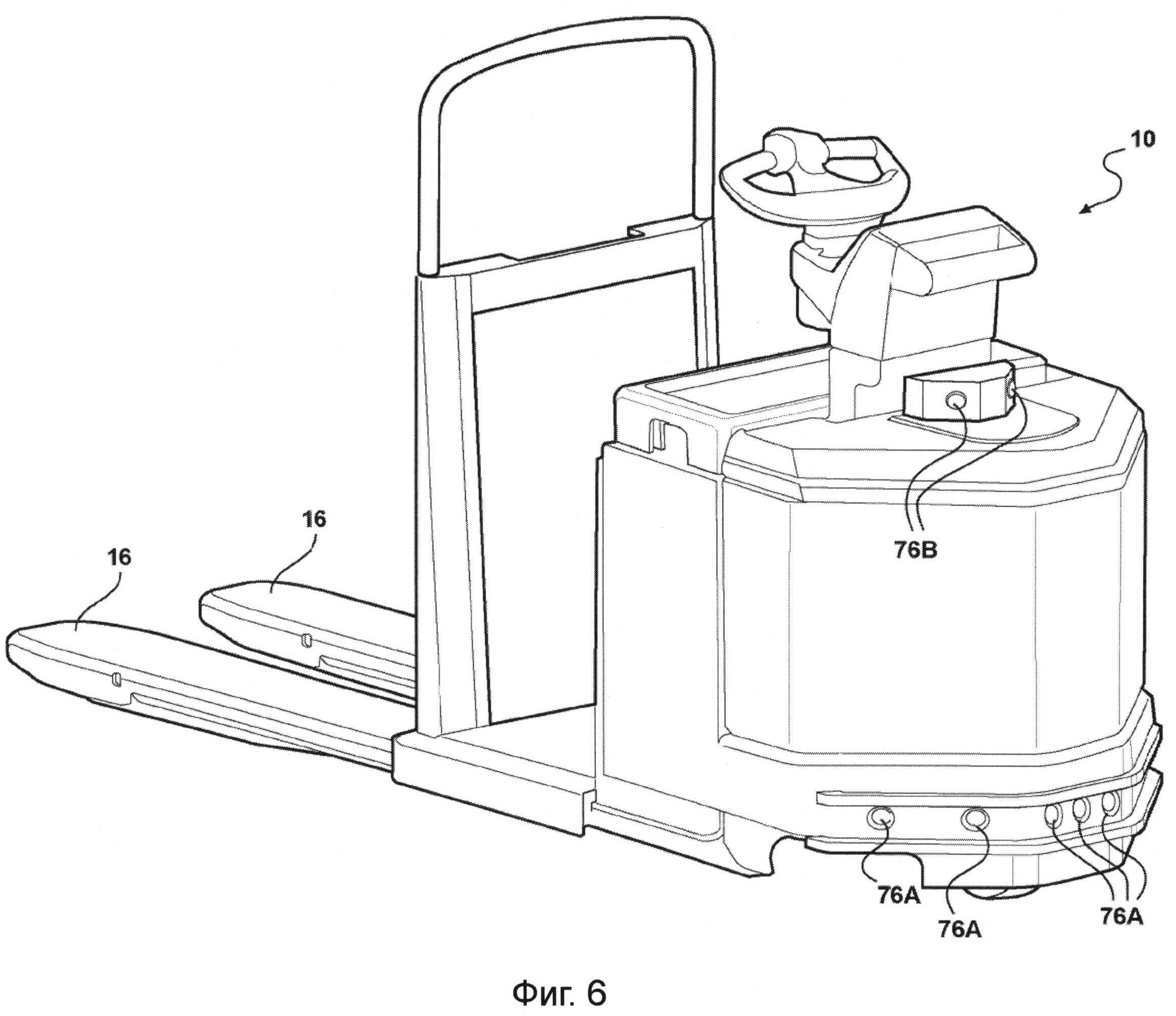
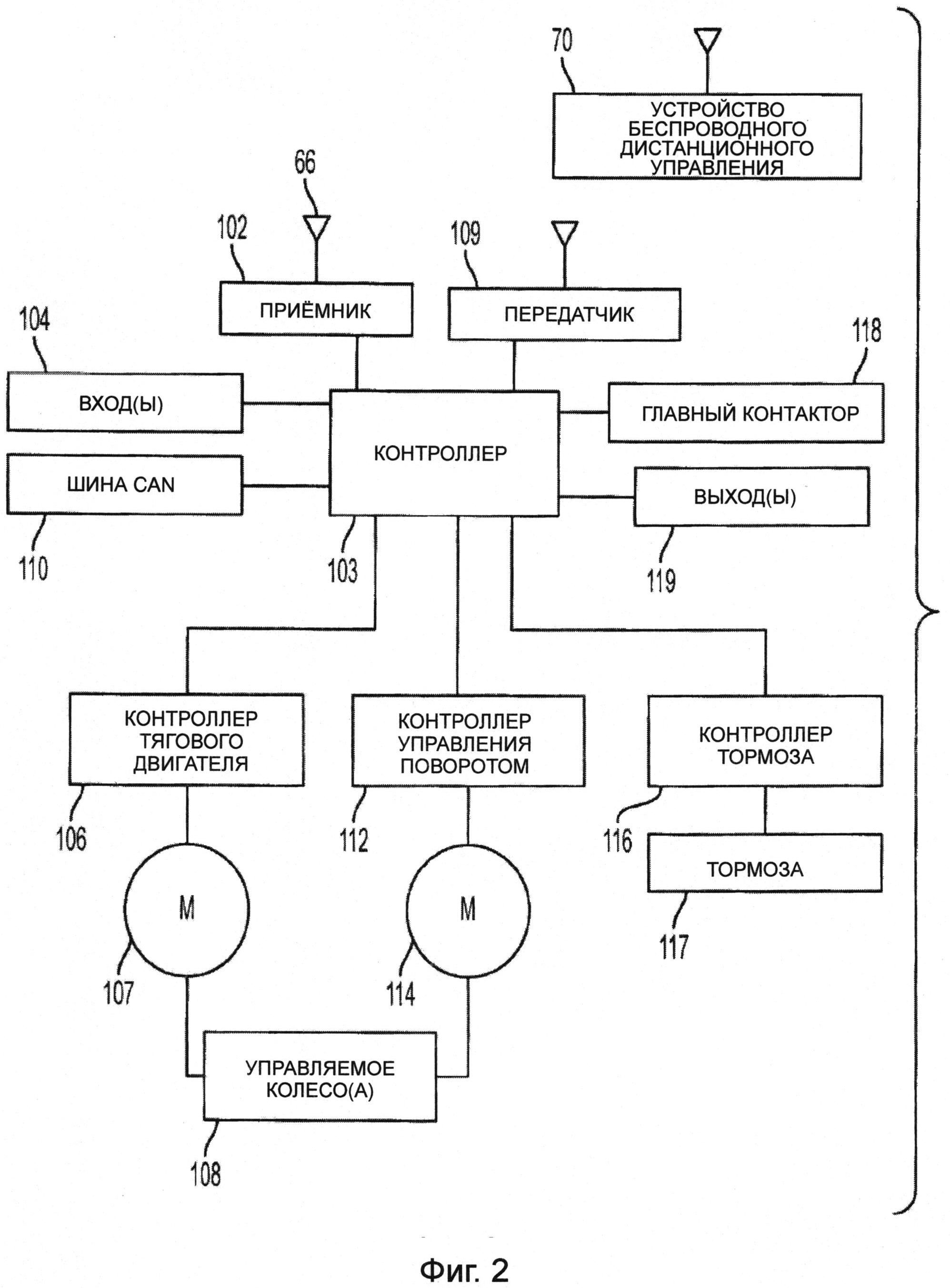
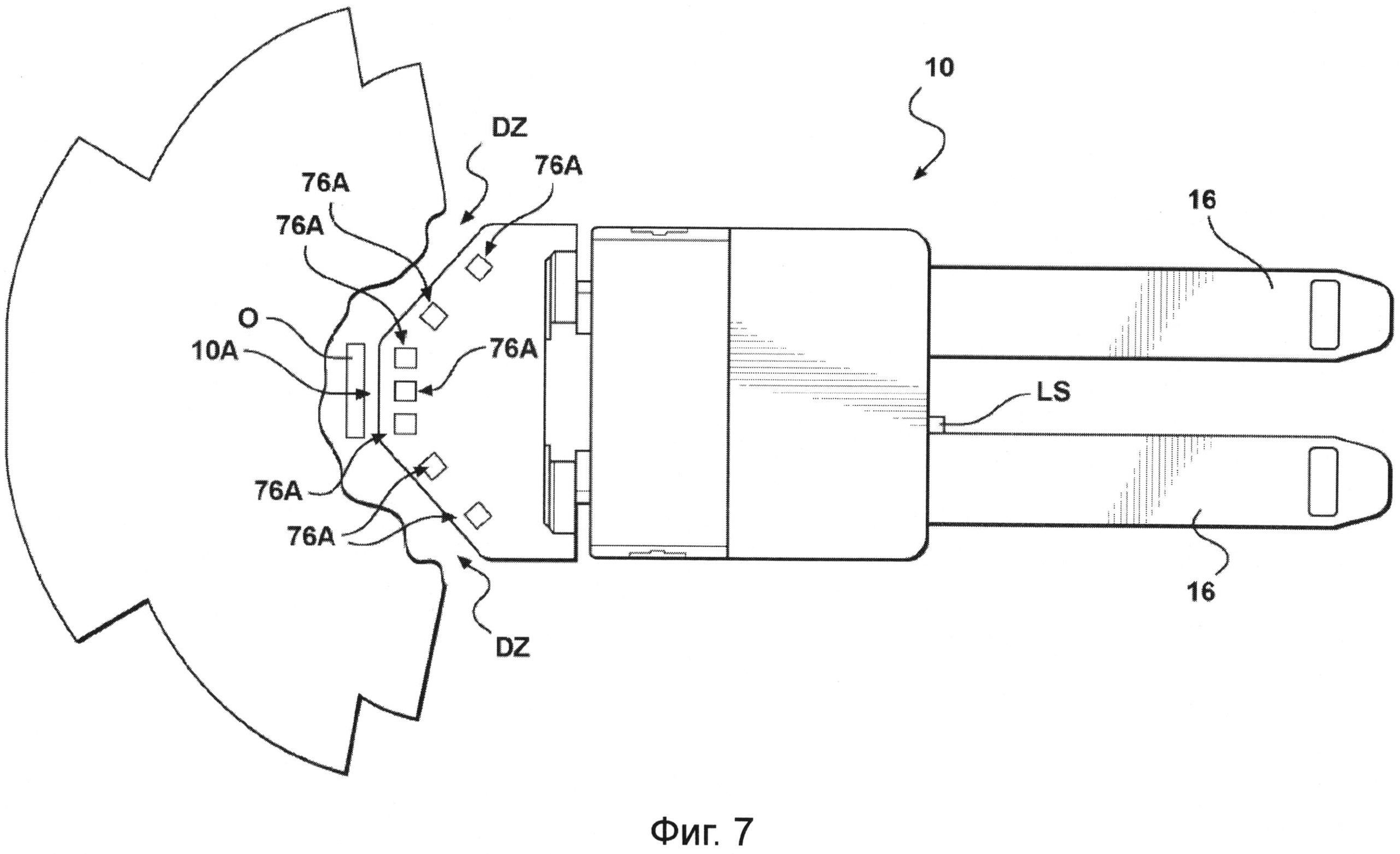
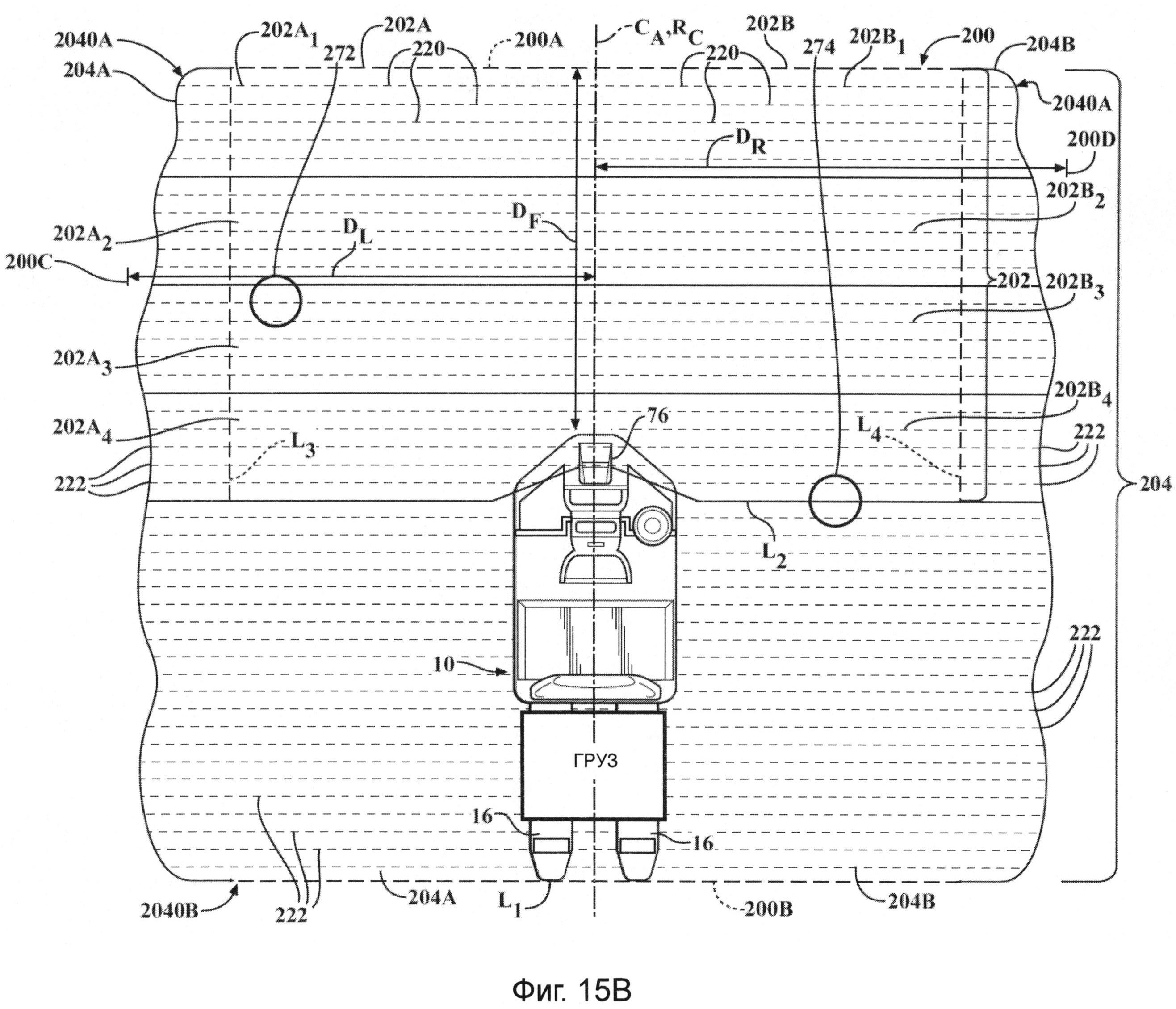
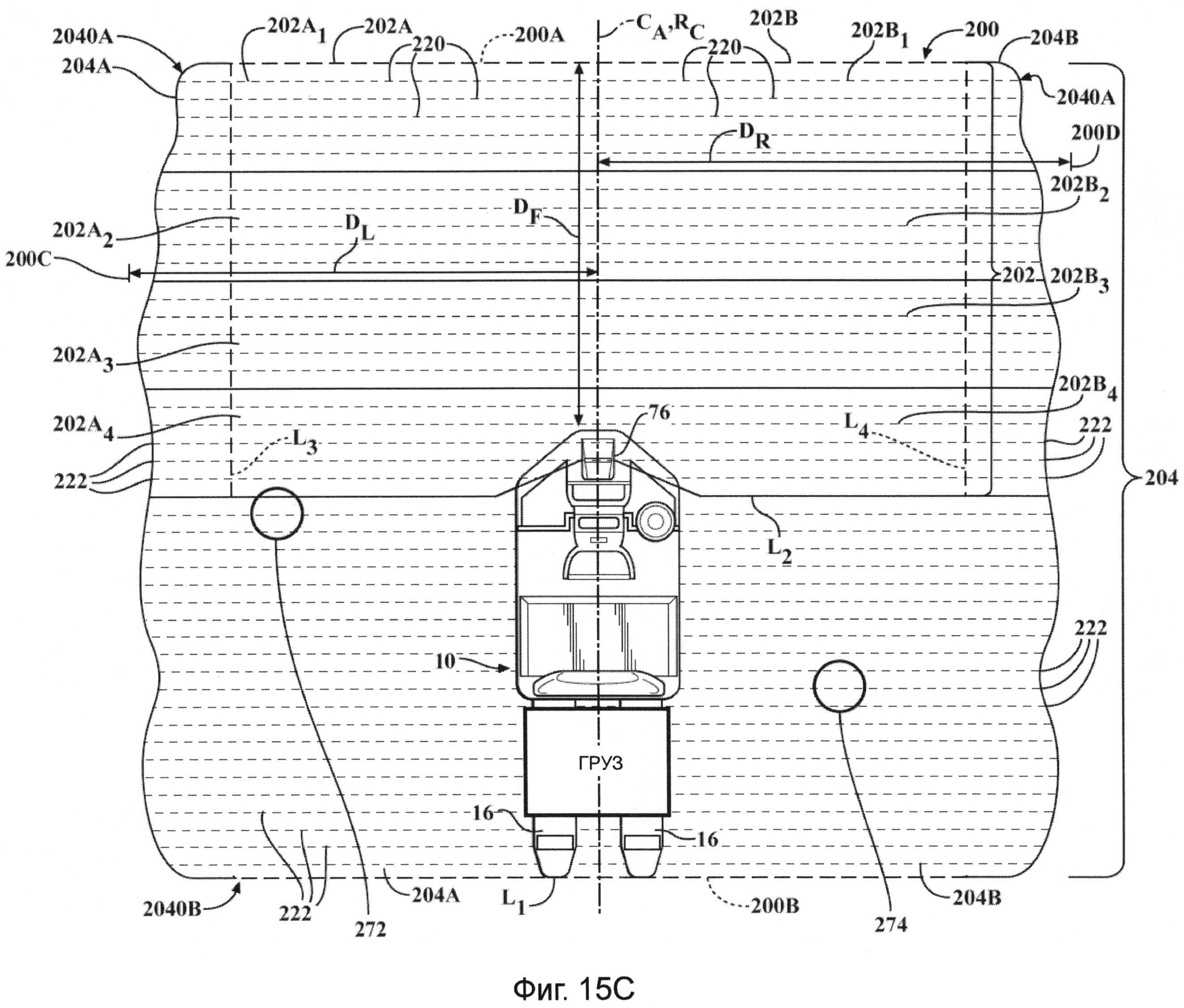
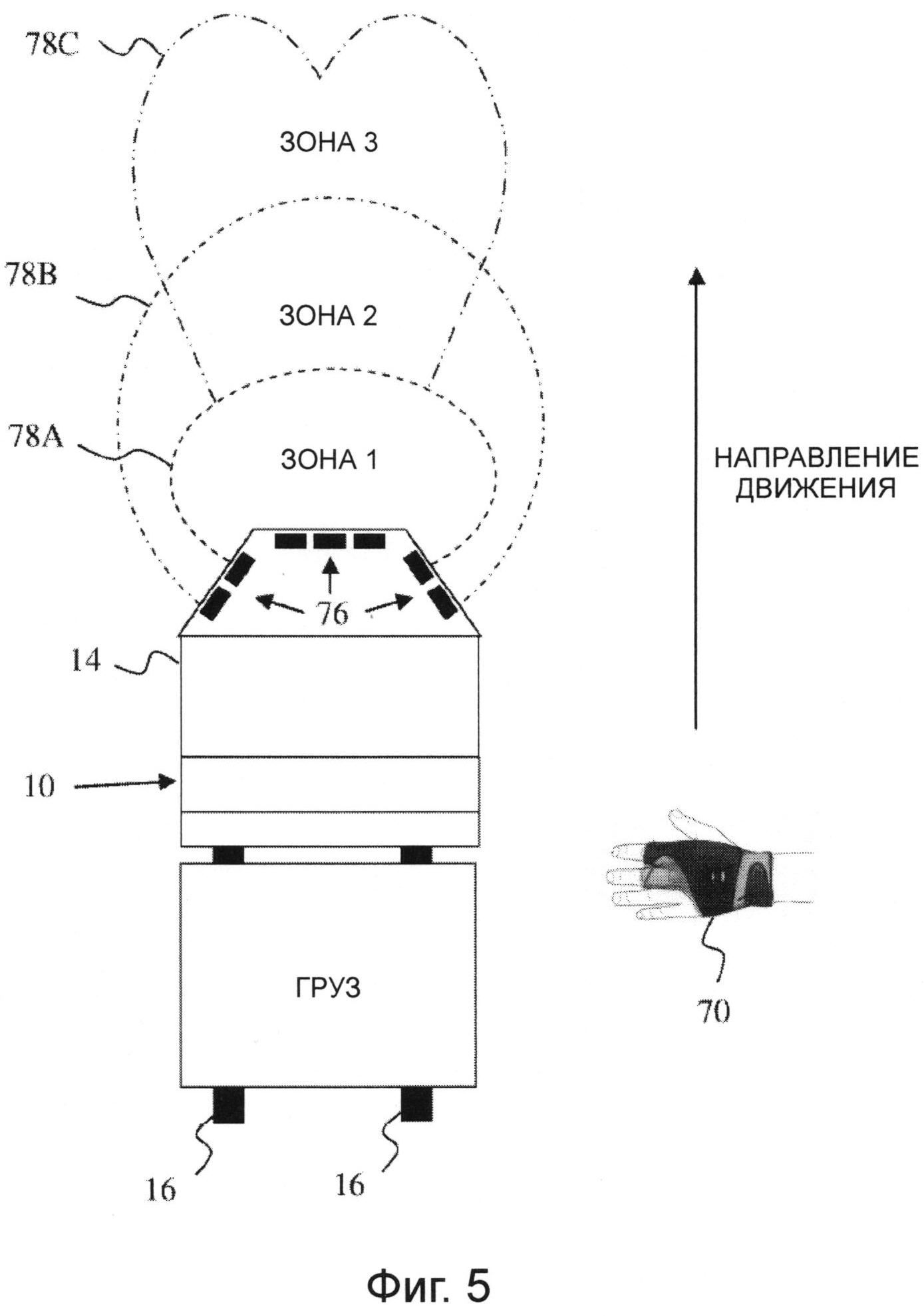
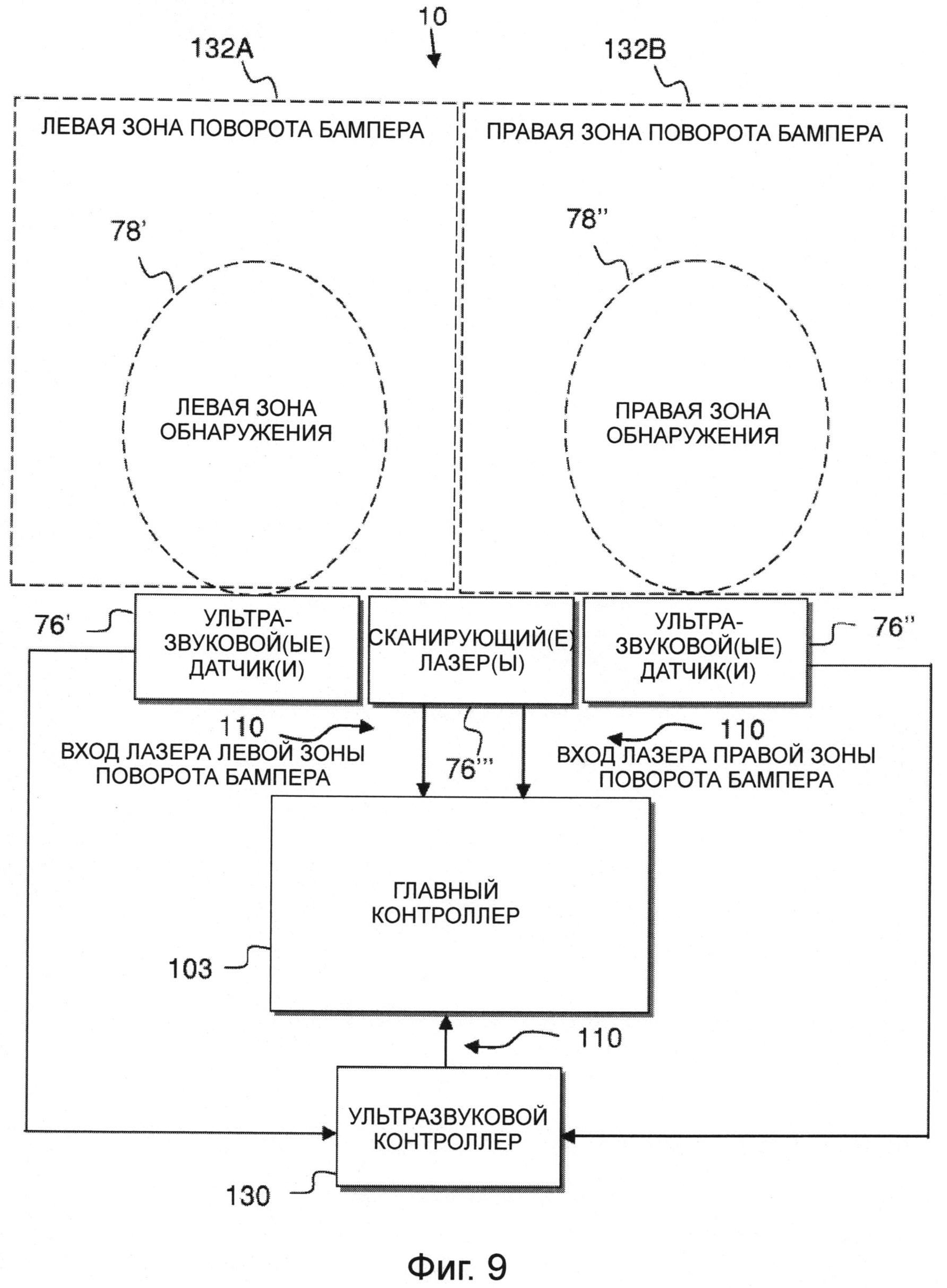
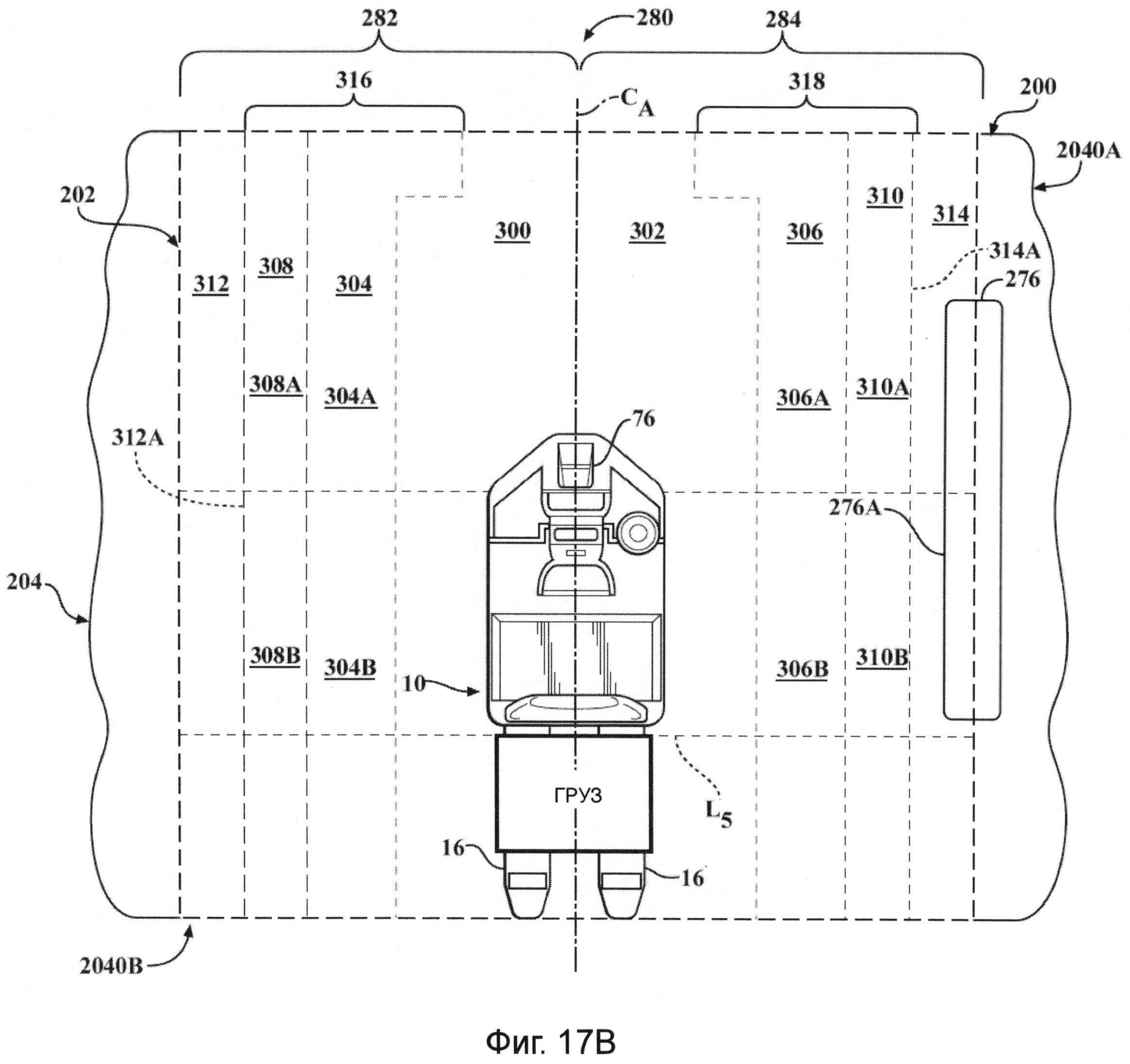
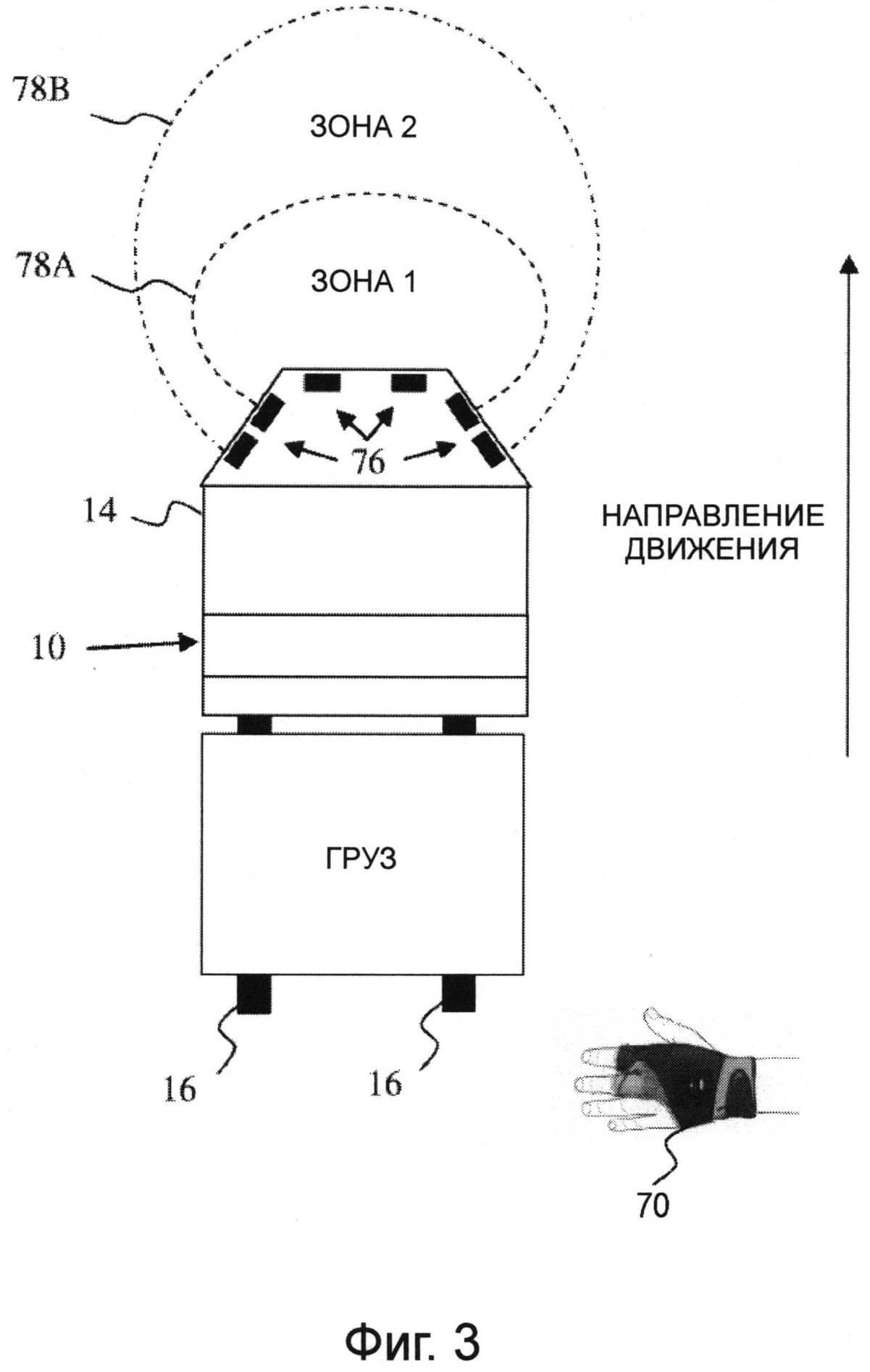
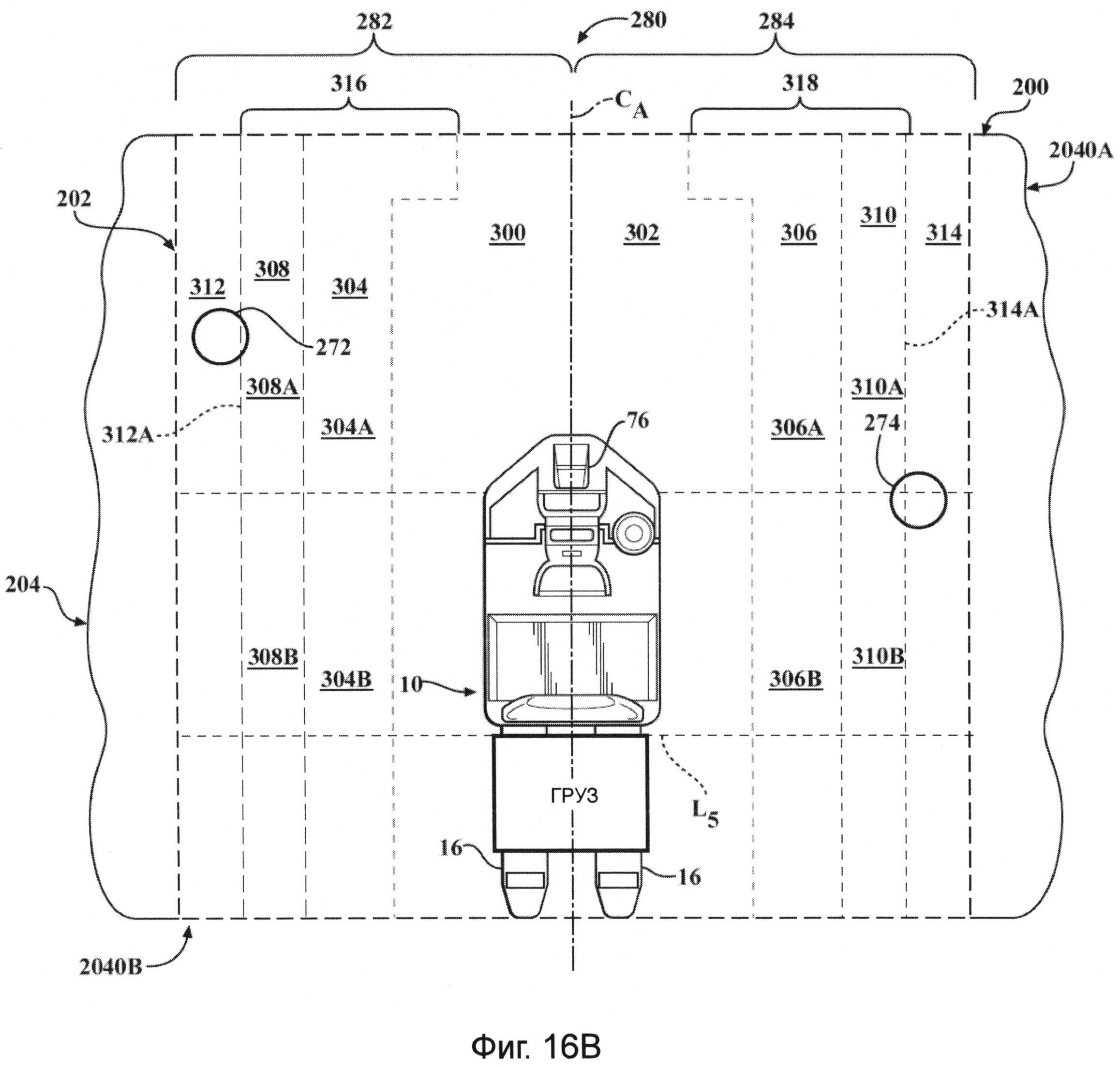
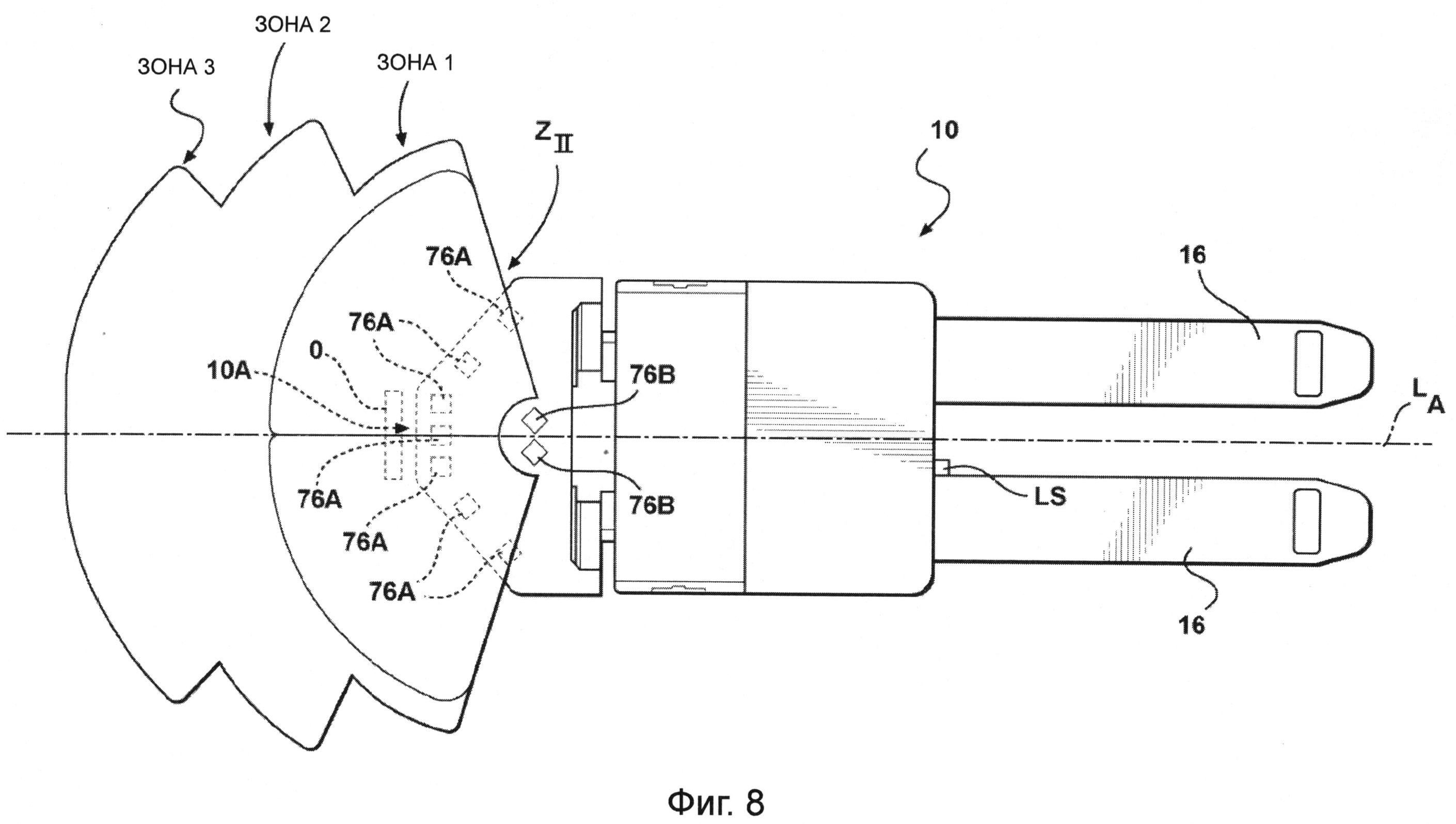
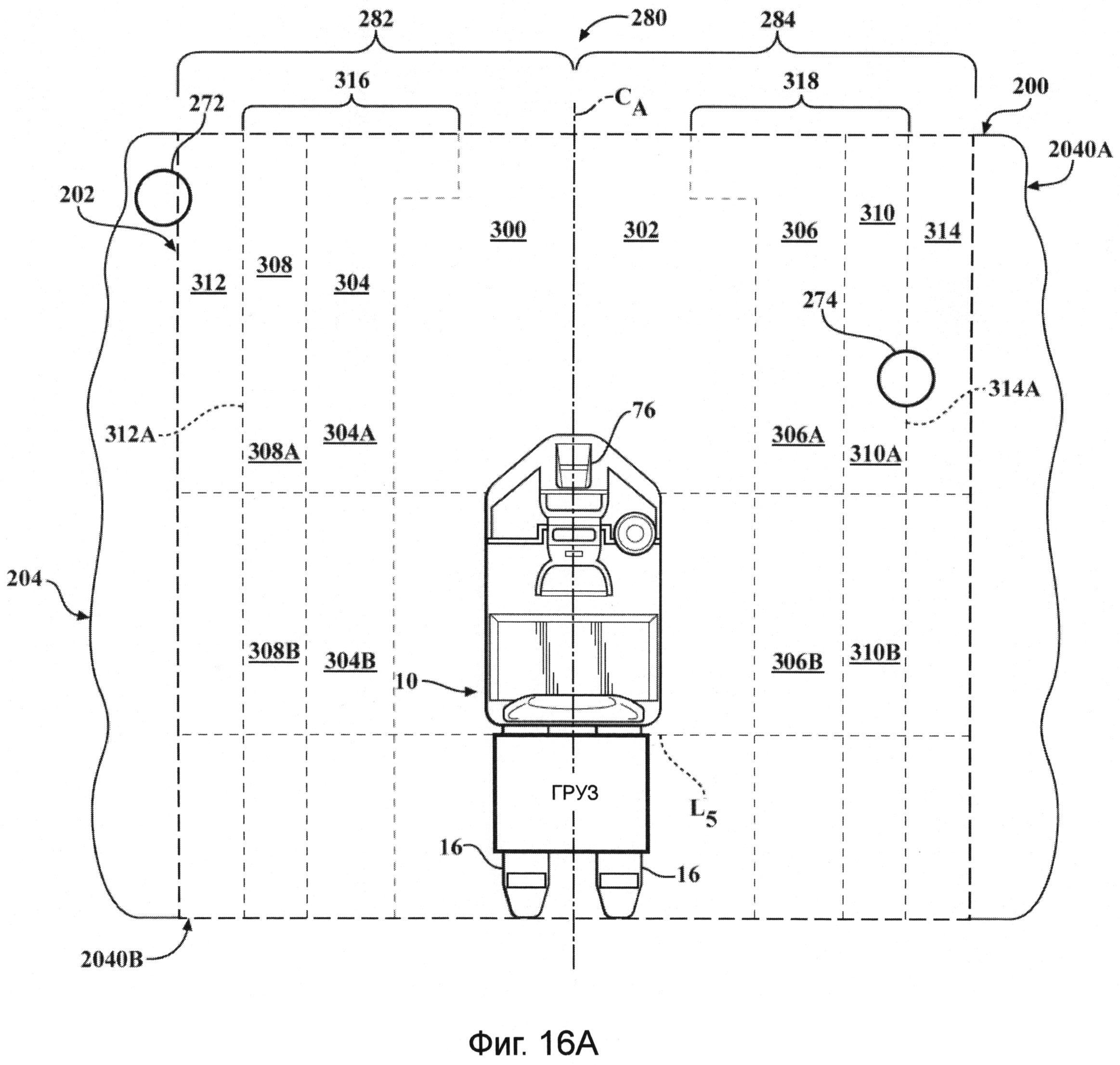
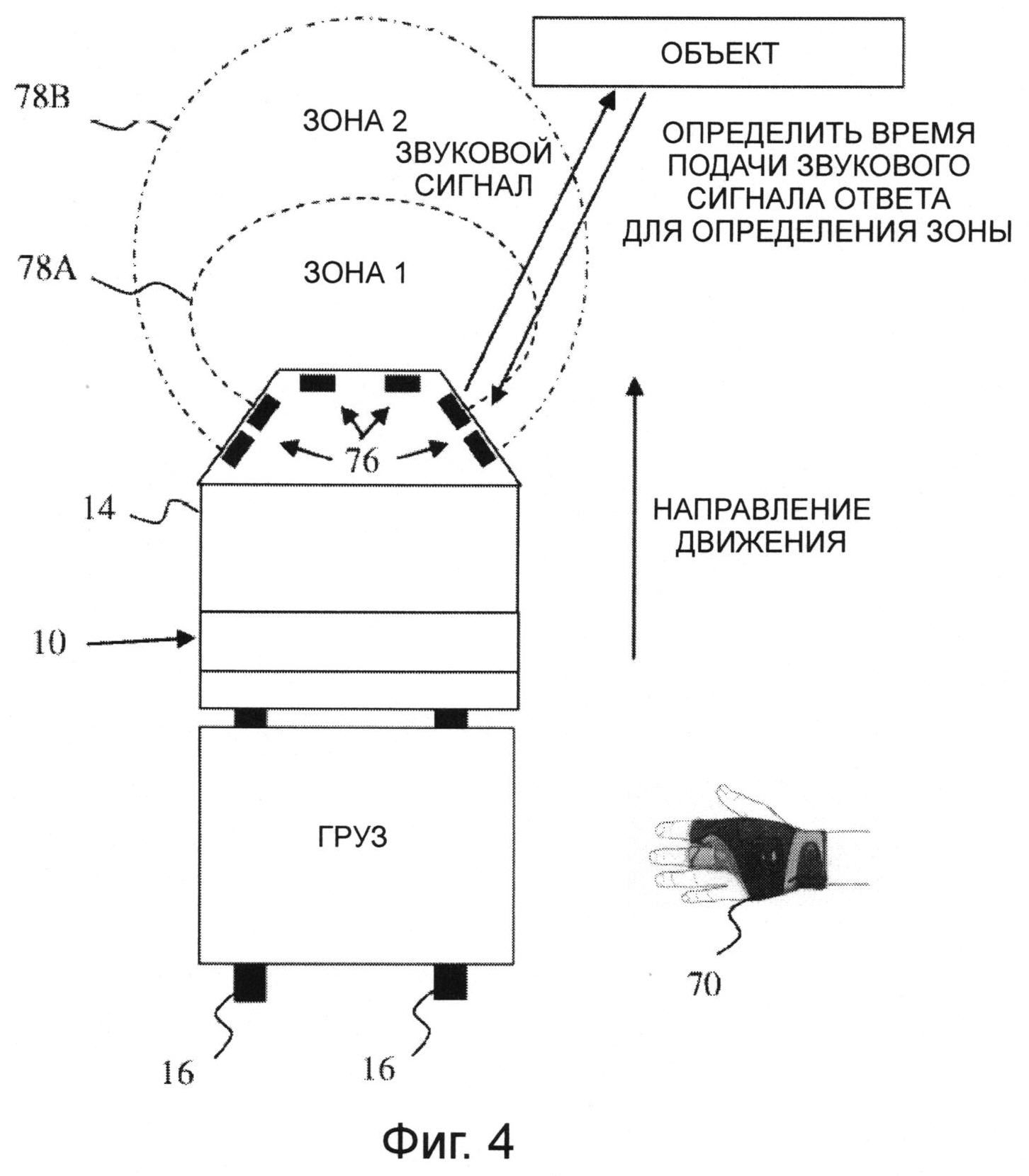
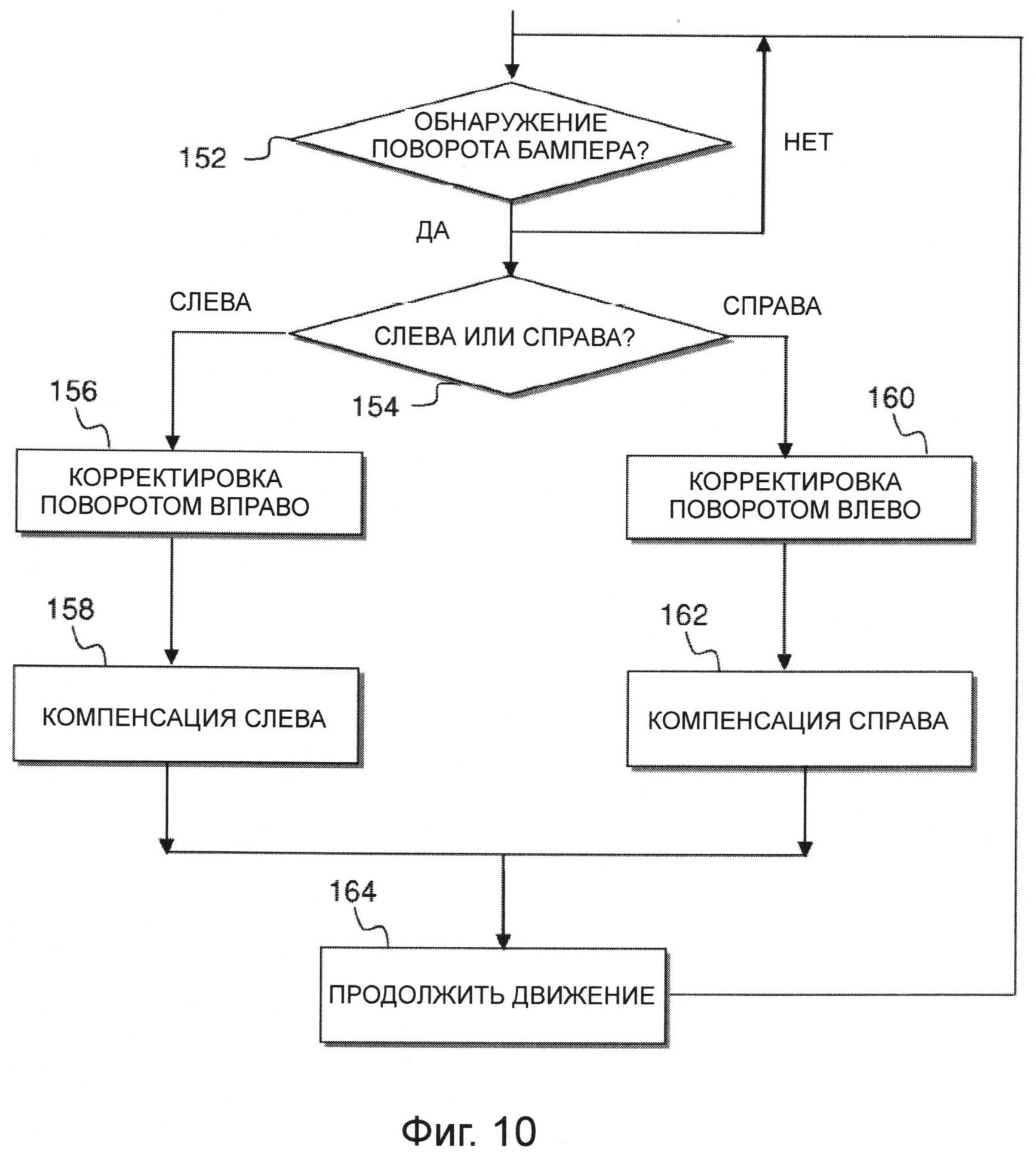
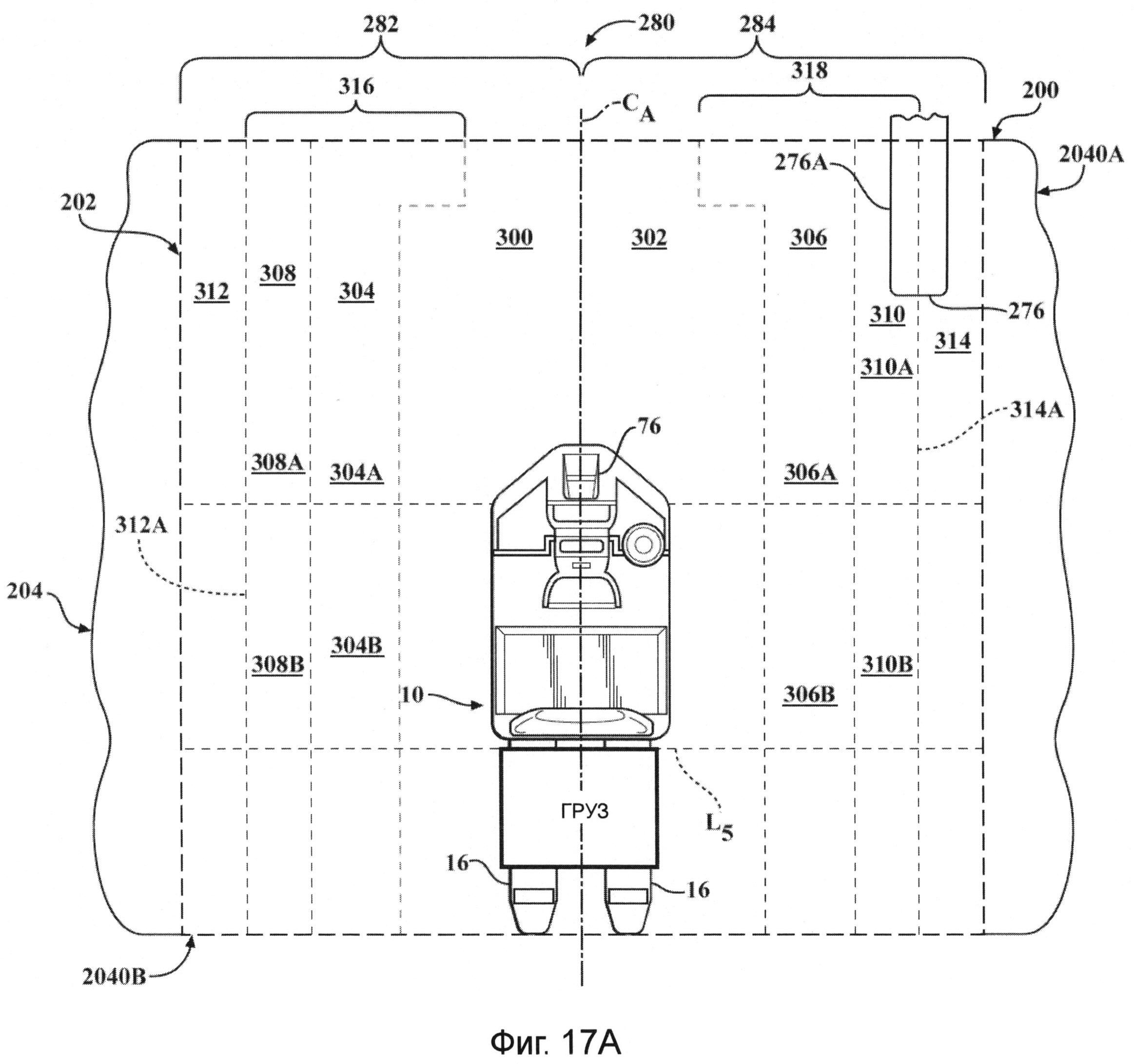
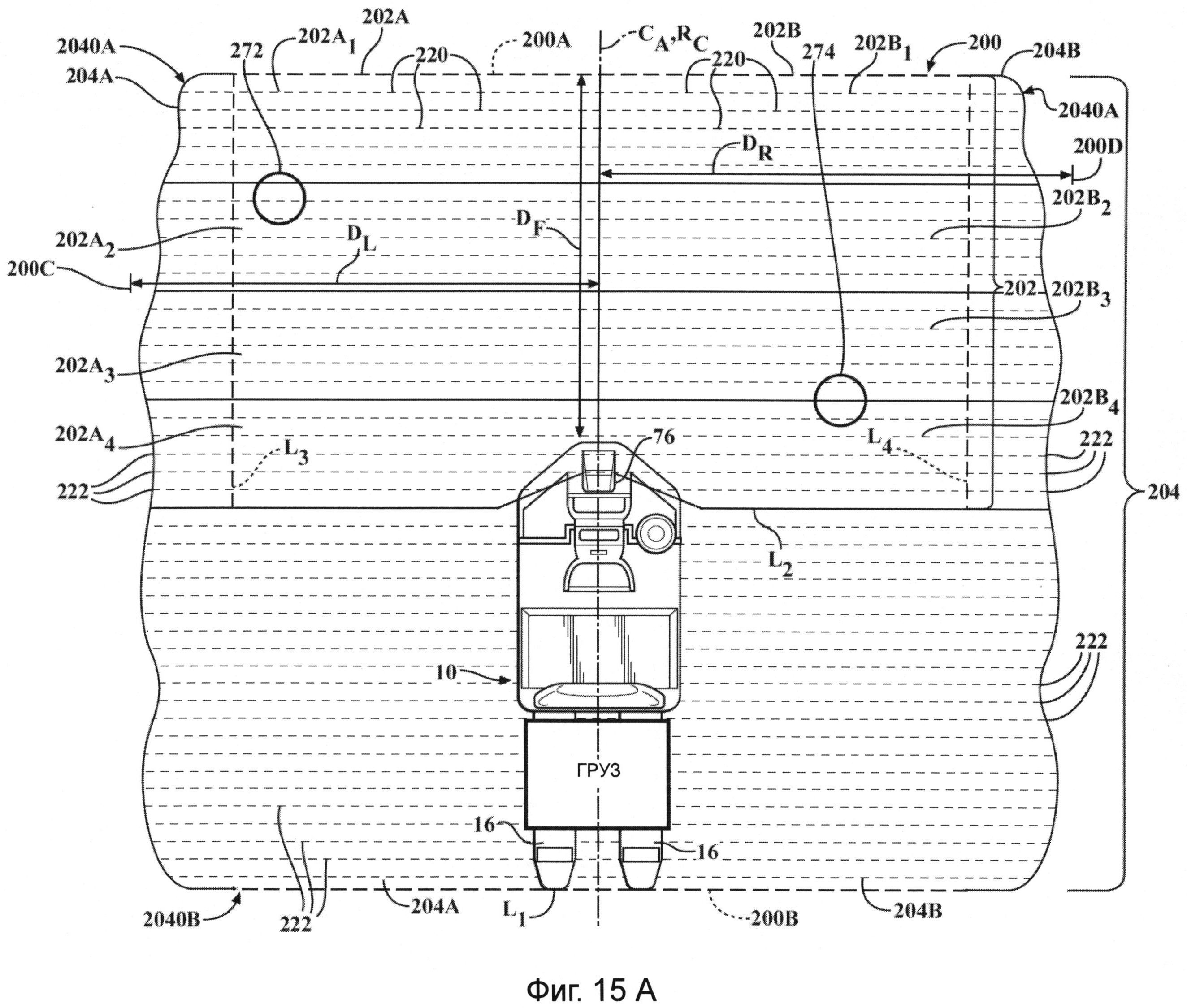
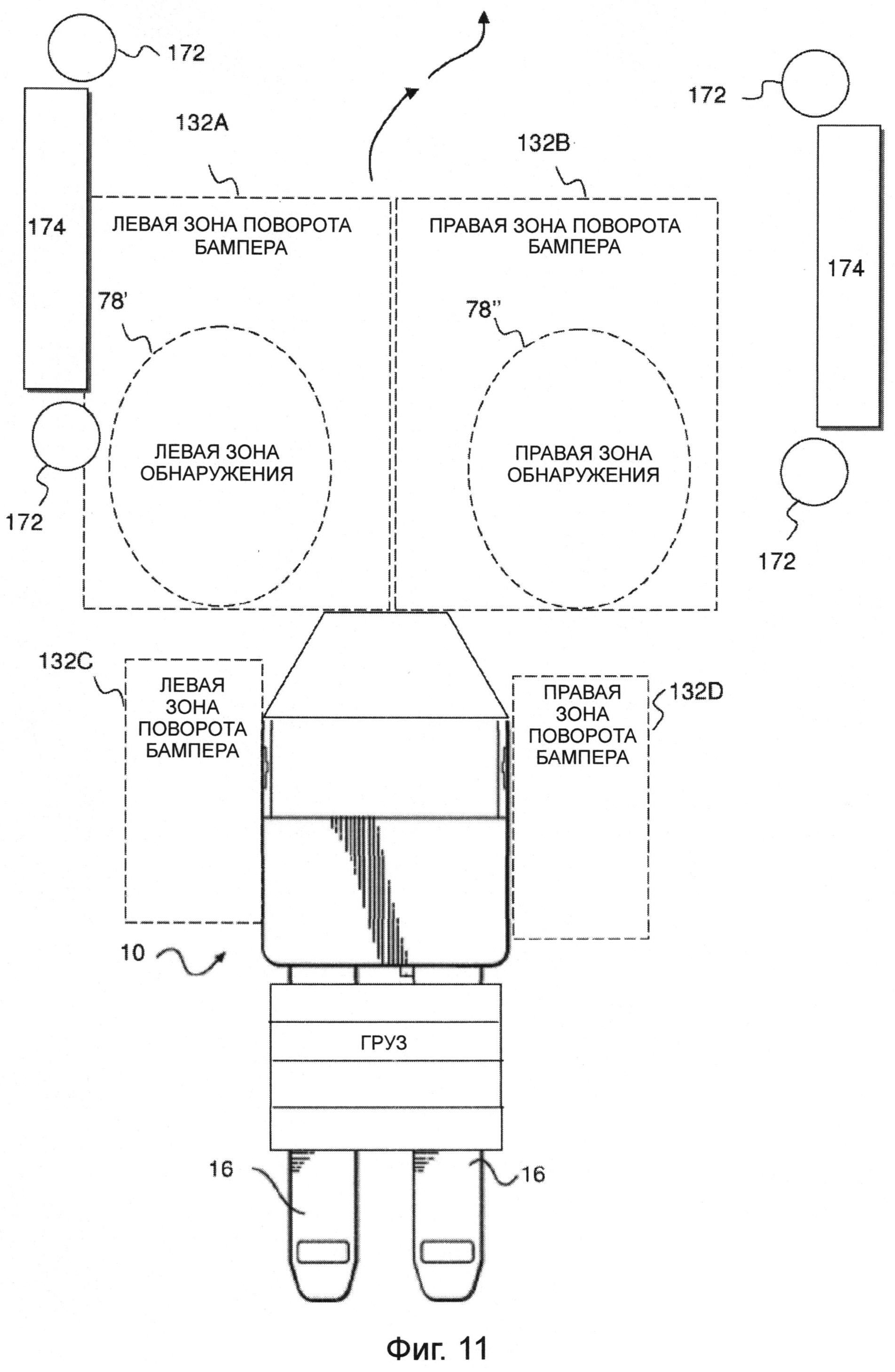
Информационная система для промышленных машин
Одновременное зондирование нескольких зон для погрузочно-разгрузочных устройств
Подъемно-транспортная машина и способ корректировки направления её движения
Способ, использующий опознавание воздействия для системы управления парками транспортных средств
Подъемно-транспортная машина
Отслеживание объектов и маневры руления погрузочно-разгрузочных транспортных средств
Система и способы дистанционного управления поргузочно- разгрузочным транспортным средством
Подъемно-транспортная машина и способ управления подъемно-транспортной машиной
Устройство транспортировки аккумуляторных батарей
Система и способ мониторинга функционального состояния погрузочно-разгрузочного транспортного средства
Информационная система для промышленных машин
Одновременное зондирование нескольких зон для погрузочно-разгрузочных устройств
Подъемно-транспортная машина и способ корректировки направления её движения
Способ, использующий опознавание воздействия для системы управления парками транспортных средств
Подъемно-транспортная машина
Отслеживание объектов и маневры руления погрузочно-разгрузочных транспортных средств
Система и способы дистанционного управления поргузочно- разгрузочным транспортным средством
Подъемно-транспортная машина и способ управления подъемно-транспортной машиной
Устройство транспортировки аккумуляторных батарей
Система и способ мониторинга функционального состояния погрузочно-разгрузочного транспортного средства

