Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к авиационной технике, а именно к способам и устройствам определения центра масс летательного аппарата (ЛА) в полете.
В настоящее время вес самолета на земле определяется в его незагруженном состоянии с помощью механических или электротензометрических весов, установленных в специальных помещениях. Центровку, соответствующую этому состоянию самолета, а также различным вариантам загрузки, находят путем расчета аналитическим или графическим методом.
Известен способ определения веса и положения центра тяжести самолета (патент RU 2319115 C1, МПК G01G 19/07, опубл. 10.03.2008), осуществляемый автоматически на борту самолета перед его загрузкой и после загрузки в процессе руления по аэродрому.
Способ включает установку датчиков давления на цилиндр каждой амортизационной опоры шасси, измерение изменяющегося давления газа в полости цилиндров в процессе руления самолета по неровностям аэродрома. Вычисление давления газа производится на основе усреднения изменений давления газа в цилиндрах амортизационных опор шасси, силы, действующей на каждую опору шасси, веса и положения центра тяжести самолета.
К недостаткам известного способа можно отнести:
- необходимость установки на стойках шасси самолета дополнительных механизмов и датчиков, измеряющих давление, что может привести к снижению надежности авиационной техники;
- ступенчатое сжатие стойки самолета из-за трений в цилиндрах амортизации и на шарнирах крепления стойки шасси, что приводит к неправильной работе автоматики центровки;
- отсутствие возможности определения точки нахождения центра тяжести в полете, местоположение которой может меняться в процессе выработки топлива, сброса груза, дозаправки и т.д., что приводит к снижению устойчивости автоматического управления полетом самолета.
Известны также способ и устройство для определения величины и направления смещения центра масс аппарата, описанные в патенте RU 2176810 C2, МПК G05B 23/00, опубл. 10.12.2001, принятые нами в качестве прототипов.
Сущность способа и устройства состоит в определении полетной взаимосвязи приращения абсолютного линейного ускорения аппарата в его произвольной точке по отношению к ускорению его центра масс с величиной и направлением смещения центра масс от этой точки в процессе движения.
Данный способ основан на измерении параметров полета аппарата и включает в себя, в частности, измерение текущих углов тангажа и крена, кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, абсолютного ускорения в произвольной точке, ускорения силы тяжести и, на основании полученной совокупности данных, определение величины и направления смещения центра масс.
Устройство, реализующее данный способ, содержит, в частности, датчики углов крена и тангажа, датчик угловых скоростей, акселерометр, блок определения составляющих ускорения силы тяжести, блок текущих координат центра масс, сумматор и два селектора частоты, причем согласно описанию изобретения измерения угловых скоростей, угла тангажа, координаты местоположения, ускорения точки установки акселерометров и ускорения силы тяжести могут быть осуществлены при помощи бортовой инерциальной системы навигации (БИНС).
Недостатками данного способа и устройства являются:
- низкая точность определения координат центра масс из-за очень слабой наблюдаемости полезных сигналов для определения центра масс ЛА;
- наличие неучтенной погрешности, вызванной несовпадением центра масс с точкой установки БИНС;
- необходимость большого объема сложных вычислений и фильтраций, что усложняет способ и устройство для его реализации.
Задачей настоящего изобретения является упрощение и удешевление способа и устройства, а также повышение точности измерения координат центра масс ЛА, что повышает безопасность полетов, особенно за счет оперативности определения центровки при изменении веса груженого самолета непосредственно в полете.
Поставленная техническая задача решается следующим образом.
Согласно заявляемому способу определения центра масс летательного аппарата, основанному на измерении параметров полета аппарата и включающему в себя измерение текущих углов тангажа, кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, абсолютного ускорения в произвольной точке, использование значения ускорения силы тяжести, вычисленного в реальном масштабе времени, и, на основании полученной совокупности данных, определение центра масс, дополнительно измеряют центростремительные ускорения относительно центра масс в двух фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии друг от друга, посредством акселерометров, установленных в этих точках, один в хвостовой, другой в головной частях фюзеляжа, причем определение центра масс производят в установившемся режиме полета при выполнении маневра типа «змейка».
В устройство для реализации данного способа определения центра масс летательного аппарата, включающее акселерометр и навигационную систему, дополнительно введены второй акселерометр, причем акселерометры установлены в фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии друг от друга, один в хвостовой, другой в головной частях фюзеляжа, вычитающее устройство, к входам которого подключены выходы акселерометров, два устройства возведения в степень, входы которых соединены с соответствующими выходами навигационной системы по сигналам угловых скоростей, три сумматора, входы первого из которых соединены с выходами устройств возведения в степень, два умножителя, задатчик сигнала, соответствующего расстоянию между акселерометрами, подключенный к первому входу первого умножителя, второй вход которого соединен с выходом первого сумматора, а выход подключен к первому входу второго сумматора, второй вход которого соединен с выходом вычитающего устройства, а выход подключен к первому входу третьего сумматора, блок определения синуса, вход которого соединен с выходом навигационной системы по сигналу угла тангажа, а выход подключен к первому входу второго умножителя, второй вход которого соединен с выходом навигационной системы по сигналу ускорения силы тяжести, два масштабирующих устройства и делитель, первый вход которого соединен с выходом третьего сумматора, ко второму входу которого через второе масштабирующее устройство подключен выход второго умножителя, второй вход делителя через первое масштабирующее устройство соединен с выходом первого сумматора, а выход делителя является выходом устройства.
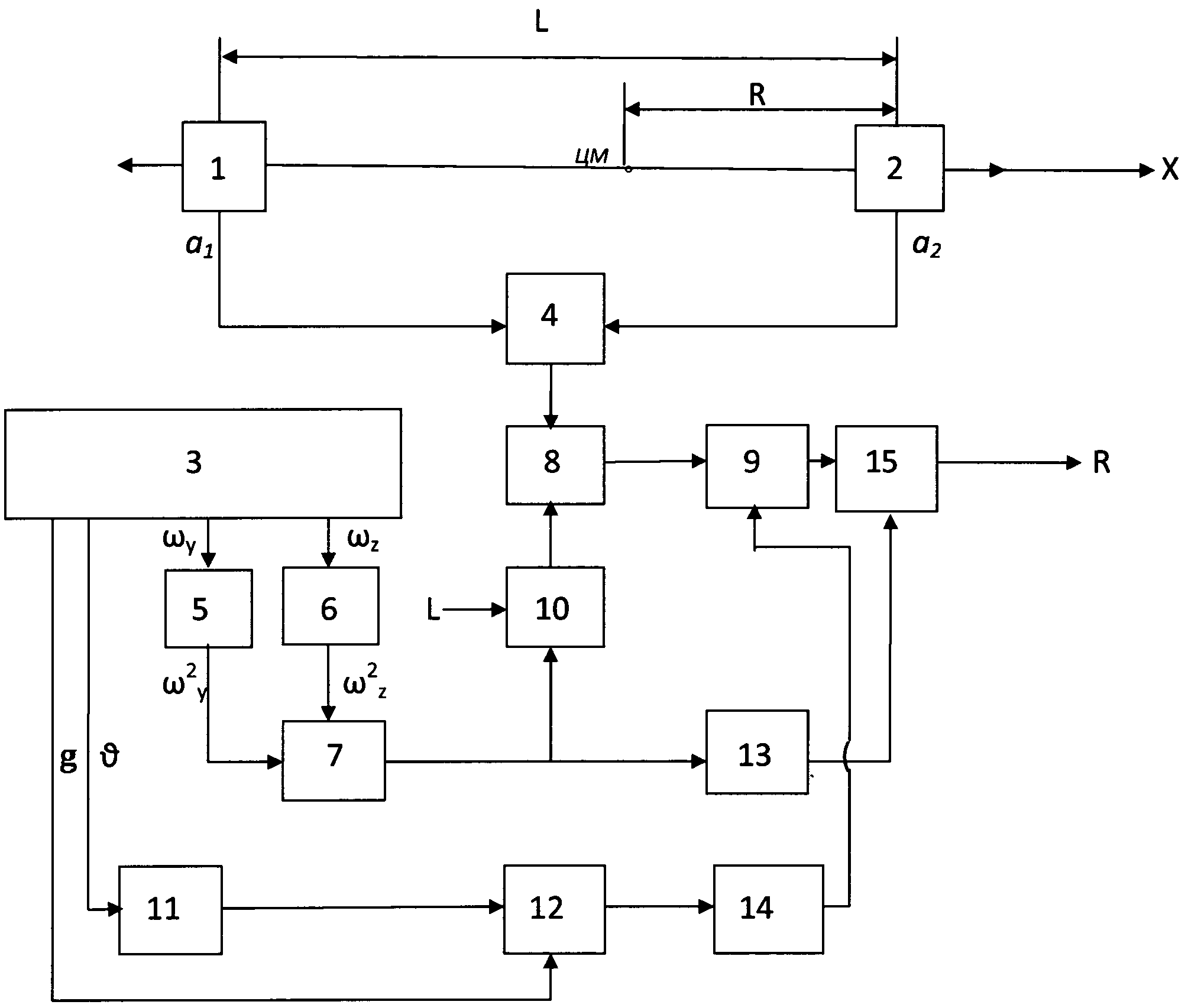
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства для определения центра масс летательного аппарата.
Устройство включает в себя акселерометры 1 и 2, бортовую навигационную систему 3, вычитающее устройство 4, к входам которого подключены выходы акселерометров, два устройства 5, 6 возведения в степень, в данном случае во 2-ю, входы которых соединены с соответствующими выходами навигационной системы по сигналам угловых скоростей ωy, ωz, три сумматора 7, 8 и 9. Входы сумматора 7 соединены с выходами устройств 5, 6 возведения в степень. Устройство содержит также первый умножитель 10, к первому входу которого подключен задатчик сигнала (на чертеже не показан), соответствующего расстоянию L между акселерометрами, ко второму входу подключен выход первого сумматора 7, а выход умножителя 10 подключен к первому входу второго сумматора 8, второй вход которого соединен с выходом вычитающего устройства 4, а выход подключен к первому входу третьего сумматора 9. Кроме того, устройство содержит блок 11 определения синуса, вход которого соединен с выходом навигационной системы 3 по сигналу угла тангажа ϑ, а выход подключен к первому входу второго умножителя 12, второй вход которого соединен с выходом навигационной системы 3 по сигналу ускорения силы тяжести g, два масштабирующих устройства 13 и 14 с коэффициентами передачи, равными «2», и делитель 15. Первый вход делителя 15 соединен с выходом третьего сумматора 9, ко второму входу которого через второе масштабирующее устройство 14 подключен выход второго умножителя 12, второй вход делителя 15 через первое масштабирующее устройство 13 соединен с выходом первого сумматора 7, а выход делителя 15 является выходом устройства.
Согласно заявленному способу определения центра масс (ЦМ) летательного аппарата, дополнительно измеряют центростремительные ускорения a 1, a 2 относительно ЦМ акселерометрами 1 и 2, установленными в фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии L друг от друга, первый 1 в хвостовой, второй 2 в головной частях фюзеляжа. Оси чувствительности акселерометров направлены вдоль продольной оси и совпадают со связанной осью самолета ОХ. Измерение центростремительных ускорений a 1, a 2 и определение ЦМ производят в процессе выполнения ЛА маневра типа «змейка», в установившемся режиме полета. При определении ЦМ используют полученные из бортовой навигационной системы 3 ЛА значения угловых скоростей ωy, ωz, измеренное значение угла тангажа ϑ в реальном масштабе времени и вычисленное в вычислителе бортовой навигационной системы 3 значение g для текущих параметров полета.
Таким образом, полученные из установленных акселерометров 1, 2 и от бортовой навигационной системы 3 параметры полета самолета и используемые определенные соотношения между ними, приведенные ниже, позволяют определить координаты ЦМ ЛА.
Из уравнения вращательно-поступательного движения измеряемые акселерометрами проекции кажущегося ускорения a i на оси чувствительных элементов имеют следующий вид:

где N - номер акселерометра;
 - составляющее центростремительного ускорения;
- составляющее центростремительного ускорения;
 - составляющее тангенциального ускорения;
- составляющее тангенциального ускорения;


 - вектор проекций (косинусы угла) осей чувствительности i-го акселерометра на оси связанной системы координат,
- вектор проекций (косинусы угла) осей чувствительности i-го акселерометра на оси связанной системы координат, ;
;
 - вектор проекции расстояния от центра масс до i-го акселерометра,
- вектор проекции расстояния от центра масс до i-го акселерометра,
 .
.
Тогда из (1) найдем проекции ускорений и угловых скоростей на ось X для обоих акселерометров 1 и 2:

Отсюда:

С учетом того, что gx=g·sinϑ.
ϑ - текущее значение тангажа и из условий установившегося режима полета,

Полученные значения R за N измерений усредняются. Расчеты показывают, что учет линейного ускорения, измеренного бортовой навигационной системой 3, установленной не на центре масс, приведет к появлению погрешности. Из первого уравнения (2) следует, что расстояние R можно определить и по сигналам одного акселерометра. Однако при этом увеличивается порог чувствительности по угловой скорости, т.е. требуемая угловая скорость должна быть больше 40 град в секунду, и уменьшается точность определения R. Из полученного выражения (3) следует, что центровку можно определить только при наличии угловых скоростей по осям Z или Y. Необходимо отметить, что в выражении (3) величины  , а при значениях
, а при значениях  град/сек вычислять R нецелесообразно. Как показывают расчеты, наибольшую точность можно получить, если измерения проводить при выполнении маневра «змейка» или части его в установившемся полете, когда путевая скорость ЛА постоянна.
град/сек вычислять R нецелесообразно. Как показывают расчеты, наибольшую точность можно получить, если измерения проводить при выполнении маневра «змейка» или части его в установившемся полете, когда путевая скорость ЛА постоянна.
Реализация способа может быть осуществлена с помощью устройства, описанного выше, в котором в качестве акселерометров могут быть использованы как микромеханические датчики (для ЛА интенсивного маневрирования), так и высокоточные датчики (для маломаневренных ЛА). В качестве входных сигналов устройства могут быть использованы выходные сигналы бортовых навигационных комплексов или курсовертикали, а вычислительная часть устройства может быть выполнена на стандартных элементах вычислительной техники.
Таким образом, заявленные способ и устройство просты в реализации и применении, обладают достаточно высокой точностью и могут быть использованы во всех типах ЛА для определения координат местоположения центра масс ЛА.
Устройство сбора данных
Способ коррекции бесплатформенной инерциальной навигационной системы
Комплексный способ навигации летательных аппаратов
Адаптивная бесплатформенная инерциальная курсовертикаль
Способ определения углов пространственной ориентации
Малогабаритная адаптивная курсовертикаль
Устройство сбора данных
Способ коррекции бесплатформенной инерциальной навигационной системы
Комплексный способ навигации летательных аппаратов
Адаптивная бесплатформенная инерциальная курсовертикаль
Способ определения коэффициентов калибровки интегрированного блока датчиков
Способ помощи в навигации для уточнения траектории летательного аппарата
Способ определения углов ориентации ла на вертикальных траекториях полета
Электромеханический привод поступательного действия
Способ контроля исправности интегрированных блоков датчиков
Способ лечения и профилактики желудочно-кишечных заболеваний у животных

